Grundlagen der Rechnerarithmetik
Werbung

Grundlagenpraktikum
V30: Grundlagen Der Rechnerarithmetik
Technische Universität Hamburg-Harburg
Institut für Zuverlässiges Rechnen
http://www.ti3.tu-harburg.de/RechArith/index.html
Stand: 05. April 2006
Inhaltsverzeichnis
1 Einleitung
1
2 Gleitpunktarithmetik
1
2.1
Gleitpunktzahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2.2
Rundung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2.3
Die arithmetischen Operationen für Gleitpunktzahlen . . . . . . . . . . . . . . . . . . . . . .
5
2.4
Bemerkungen und Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.5
Fehlerfortpflanzung während der Rechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
3 Kondition eines Problems und Kondition eines Verfahrens
10
4 Fehleranalyse
12
5 Ausblick und Literatur
15
6 Versuchsbeschreibung und -durchführung
17
7 Auswertung und Überlegungen
19
8 Kurzeinführung MATLAB
19
1
Einleitung
Elektronische Rechenanlagen werden in immer stärkerem Maße zur Problemlösung in Industrie und Wissenschaft eingesetzt. Bei all diesen Problemen verarbeiten numerische Algorithmen gemäß einer Rechenvorschrift
numerische Daten auf einem Rechner. Diese Rechner arbeiten in fast allen Fällen mit der Gleitpunktarithmetik. Die üblichen elementaren Rechenoperationen +, −, ·, / werden durch die auf dem Rechner implemen· ,3
/ für Gleitpunktzahlen ersetzt. Diese Operationen stimmen jedoch mit den
−, 3
+,3
tierten Operationen 3
exakten Operationen +, −, ·, / nur näherungsweise überein. Daher sind Zweifel angebracht, ob die durch den
Rechner erzielten Ergebnisse immer richtig sind, wenn Millionen von Rechenoperationen durchgeführt werden. Diese Zweifel werden dadurch verstärkt, daß schon bei kleinsten Aufgabenstellungen falsche Resultate
berechnet werden können.
Betrachten wir zum Beispiel die Summe
1050 + 812 − 1050 + 1035 + 511 − 1035 = 1323.
(1)
Summiert man diese Zahlen auf einer elektronischen Rechenanlage auf, so wird man in aller Regel den Wert
0 erhalten. Es wird Ihnen leichtfallen, die Ursachen für diesen Fehler zu erkennen, wenn Sie im Umgang mit
Rechnern vertraut sind. Etwas subtiler ist die Auswertung des Polynoms
170.4x3 − 356.41x2 + 168.97x + 18.601
(2)
an der Stelle x = 1.091608. Der exakte Wert für dieses Polynom an dieser Stelle ist 8.21248 · 10−14 . Fast
alle Rechner liefern hier falsche Resultate. Viele weitere Beispiele werden Sie im Verlauf des Praktikums
kennenlernen. Aber schon diese beiden sehr einfachen Beispiele machen deutlich, daß die weitverbreitete
Rechnergläubigkeit fehl am Platz ist: Die Resultate, die der Rechner liefert, müssen“ oder (in der abge”
schwächten Form) werden schon stimmen“. Es stellen sich hier die Fragen:
”
• Warum liefern Rechner in gewissen Situationen falsche Ergebnisse?
• Welchen arithmetischen Gesetzen genügen Rechner? Offenbar gehorchen sie nicht den Gesetzen, die
wir kennen.
• Sind diese Beispiele Ausnahmen? Sind sie Anomalien?
• Wie kann man solche Beispiele erkennen und klassifizieren?
Als zukünftiger Ingenieur werden Sie während Ihres Studiums und voraussichtlich in Ihrem späteren Beruf
mit der Programmierung von Computern bzw. mit der Benutzung vorhandener Programmpakete konfrontiert werden. Dieses Praktikum soll Ihnen helfen, Ergebnisse, die ein Rechner erzielt, richtig zu beurteilen
und nicht von vornherein als mathematisch bewiesen zu akzeptieren. Sie werden die Grundlagen der implementierten Rechnerarithmetiken, gut und schlecht konditionierte Probleme und Algorithmen kennenlernen.
Die damit verbundenen theoretischen Überlegungen und einige Anschauungsbeispiele werden im folgenden
als Vorbereitung auf das Praktikum geschildert. Ziel ist es, die Phänomene, die bei schlecht konditionierten
Problemen bzw. Algorithmen in Verbindung mit der zugrunde liegenden Rechnerarithmetik auftreten, im
praktischen Versuch auf unterschiedlichen Rechnern zu demonstrieren und zu verstehen.
2
Gleitpunktarithmetik
Für ein grundlegendes Verständnis ist es wichtig zu wissen, wie üblicherweise auf einem Rechner Zahlen
dargestellt werden und wie mit ihnen gerechnet wird.
1
2.1
Gleitpunktzahlen
Es gibt viele verschiedene Methoden, reelle Zahlen durch ein endliches System von Zahlen auf einem Rechner
zu approximieren. Auf fast allen elektronischen Rechenanlagen benutzt man heute die sogenannte Gleitpunktdarstellung (floating point) von Zahlen. Diese Darstellung basiert auf der Tatsache, daß für jede reelle Zahl
x ∈ IR gilt:
k
X
x=±
mi bi
mit 0 ≤ mi ≤ b − 1, mi ∈ IN.
(3)
i=−∞
Dabei heißt b ∈ IN Basis. Ist b gleich 2, 8, 10 bzw. 16, so spricht man von einer Dual-, Oktal-, Dezimal- bzw.
Hexadezimaldarstellung. Beispielsweise besitzt 18.5 die Dezimal- und Dualdarstellungen
18.5 = 1·101 + 8·100 + 5·10−1 = 1·24 + 0·23 + 0·22 + 1·21 + 0·20 + 1·2−1 .
Auf einem Rechner können natürlich nur endlich viele Ziffern gespeichert werden. Daher arbeitet eine Rechenanlage üblicherweise mit normalisierten Gleitpunktzahlen:
x = ±m·be
mit m =
l−1
X
mi b−i
i=0
(4)
mi ∈ IN, 0 ≤ mi ≤ b − 1, m0 6= 0 und E1 ≤ e ≤ E2 , e ∈ ZZ,
m heißt Mantisse, l Mantissenlänge und e Exponent. Die Zahl 18.5 besitzt demnach die dezimale bzw.
duale normalisierte Gleitpunktdarstellung
18.5 = 1.85·101
= (1·100 + 8·10−1 + 5·10−2 ) · 101
= 1.00101·24
= (1·20 + 0·2−1 + 0·2−2 + 1 · 2−3 + 0·2−4 + 1·2−5 ) · 24 .
Auf den meisten Rechnern werden die normalisierten Gleitpunktzahlen zur Basis b = 2 dargestellt. In diesem
Fall ist 1 ≤ m < 2, da m0 6= 0. Einige Rechner erlauben auch Dezimaldarstellungen (1 ≤ m < 10), ebenso
sind Hexadezimaldarstellungen auf einigen Rechenanlagen (IBM, Telefunken) üblich. Die auf einem Rechner
darstellbaren Zahlen nennt man auch Maschinenzahlen.
Um die Portabilität von Algorithmen und die Vergleichbarkeit von Ergebnissen auf verschiedenen Rechenanlagen zu erhöhen, wurde vom IEEE ein Standardisierungsvorschlag für die binäre Gleitpunktarithmetik
ausgearbeitet [3]. Dieser spezifiziert
• die Zahlenformate,
• Anforderungen an die Genauigkeit der Operationen und der Konvertierung von Dezimalzahlen in die
Binärdarstellung und zurück,
• die Fehlerzustände zur Ausnahmebehandlung und
• die Rundung mit den Richtungen towards nearest, towards negative infinity, towards positive infinity,
towards zero.
Eine einfach genaue Maschinenzahl (single, 32 Bit) kann nach IEEE wie folgt dargestellt werden:
2
31
30
23
Exponent
22
Mantisse
± 1.m1 m2 . . . m23 · 2e
0
mit − 126 ≤ e ≤ 127
Dies entspricht einer Rechengenauigkeit von ungefähr 7 bis 8 Dezimalstellen, da 2−24 ≈ 10−7 . Da Gleitpunktzahlen grundsätzlich als normalisiert (d.h. m0 6= 0 in (4)) angenommen werden, ist bei der Basis 2 immer
m0 = 1. Diese 1 wird nicht explizit gespeichert, sondern implizit als gegeben angenommen. Man spricht von
einer impliziten 1 oder implicit one. Sie wird aber trotzdem in der Mantissenlänge mitgezählt, so daß bei
einfach genauen Maschinenzahlen l = 24 gilt!
Standard ist heute in der Regel eine Darstellung entsprechend des IEEE double Formats, bei dem 64 Bit zur
Darstellung einer Maschinenzahl verwendet werden:
63
62
52
Exponent
51
Mantisse
± 1.m1 m2 . . . m52 · 2e
0
mit − 1022 ≤ e ≤ 1023
Die Mantissenlänge l und der Exponentenbereich E1 ≤ e ≤ E2 legen das Maß für die Rechengenauigkeit
und die Größe des Zahlenbereichs fest. Viele Benutzer von Rechenanlagen haben den Eindruck, daß die
Maschinenzahlen gleichmäßig über die reelle Zahlenachse verteilt sind. Dies ist falsch; die Maschinenzahlen
sind über den Zahlenbereich nicht gleichabständig verteilt:
m
0
e
2
-1
0
1
2
0.5
1
2
4
1
1
1.25
1.5
1.75
1.002
1.012
1.102
1.112
0.5
1
2
4
0.625
1.25
2.5
5
0.75
1.5
3
6
0.875
1.75
3.5
7
e
2
3
5
4
6
7
8
R
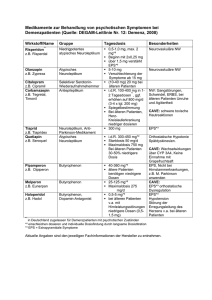
Die Skizze enthält für ein einfaches Gleitpunktsystem mit E1 = −1, E2 = 2, l = 3 und b = 2 alle möglichen
normalisierten Gleitpunktzahlen (siehe Tabelle). Offensichtlich werden die Abstände der Gleitpunktzahlen
immer kleiner, je kleiner die Beträge der Gleitpunktzahlen werden. Dies ist eine über das Beispiel hinaus
richtige, allgemein gültige Beobachtung.
2.2
Rundung
Die Menge der Maschinenzahlen ist endlich. Es stellt sich daher die Frage, wie eine reelle Zahl x ∈ IR, die
keine Maschinenzahl ist, durch eine Maschinenzahl approximiert werden kann. In diesem Zusammenhang
spricht man auch von Rundung. Dieses Problem stellt sich sowohl bei der Eingabe von Daten in einen
Rechner als auch während des Ablaufs einer Rechnung. Bei der Dateneingabe ist zu beachten, daß selbst im
Dezimalsystem sehr einfach darstellbare Zahlen in vielen Fällen keine Maschinenzahlen sind. Ein instruktives
3
Beispiel ist die Zahl 0.1, die häufig als Schrittweite in Algorithmen benutzt wird. Diese Zahl hat die folgenden
periodischen Entwicklungen
(0.1)10 = (0.0001100110011 . . .)2
= (0.012121212 . . .)4
= (0.063146314 . . .)8
= (0.199999 . . .)16 .
Benutzt man 0.1 als Schrittweite für eine Schleife in einem Algorithmus, so ist nicht sicher, wie oft die Schleife
durchlaufen wird. Dies kann zu groben Fehlern führen.
Während des Ablaufs einer Rechnung wird im allgemeinen das Resultat x ± y, x · y, x/y der einfachen
arithmetischen Operationen nicht zu den Maschinenzahlen gehören, selbst wenn beide Operanden x, y Maschinenzahlen sind. Das exakte Resultat muß dann durch eine Maschinenzahl ersetzt werden. Der Fehler,
den man dabei begeht, heißt Rundungsfehler. Den bei der Eingabe einer Zahl gemachten Rundungsfehler
nennt man speziell Konvertierungsfehler.
Eine Rundung kann offenbar als eine Abbildungsvorschrift aufgefaßt werden, die einer reellen Zahl x ∈ IR
eine Maschinenzahl rd(x) ∈ IM zuordnet wobei IM die Menge der Maschinenzahlen bezeichnet. Von einer
vernünftigen Rundung wird man verlangen:
|x − rd(x)| ≤ |x − f |
für alle f ∈ IM.
(5)
Mit anderen Worten: die Abbildung ist dergestalt, daß keine Maschinenzahl näher an x liegt, als rd(x). In
diesem Sinne ist die Rundung bestmöglich oder optimal.
Es sei hier vorweggeschickt, daß auf einigen Rechnern schlechtere Rundungen implementiert sind. Die obige
Rundungsvorschrift (5) realisieren verschiedene Verfahren, die sich in der Behandlung von reellen Zahlen
unterscheiden, die genau in der Mitte zweier aufeinanderfolgender Maschinenzahlen liegen. Zunächst stellt
man x in normalisierter Form x = ±m · be mit
m = m0 .m1 . . . ml−1 ml . . . ,
0 ≤ mi ≤ b − 1, m0 6= 0
dar.
Bei der kaufmännischen Rundung bildet man nun
m .m . . . m ,
0
1
l−1
m
e :=
m0 .m1 . . . ml−1 + b−(l−1) ,
Verwendet man round to even, so ist
m0 .m1 . . . ml−1 ,
m .m . . . m ,
0
1
l−1
m
e :=
m0 .m1 . . . ml−1 + b−(l−1) ,
m0 .m1 . . . ml−1 + b−(l−1) ,
falls ml <
falls ml ≥
falls ml .ml+1 . . . <
falls ml .ml+1 . . . =
falls ml .ml+1 . . . =
falls ml .ml+1 . . . >
b
2
b
2.
b
2
b
2 und
b
2 und
b
2.
ml−1 gerade
ml−1 ungerade
(6)
(7)
Im Gegensatz zur kaufmännischen Rundung, die Zahlen, die genau in der Mitte zweier Maschinenzahlen
liegen zur betragsmäßig größeren, also von der 0 weg runden, werden diese Zahlen hier so gerundet, daß die
letzte Ziffer der gerundeten Zahl gerade ist. Bei zweistelliger Mantisse wird 12.5 somit kaufmännisch auf 13,
mit round to even aber auf 12 gerundet. 13.5 wird mit beiden Verfahren auf 14 gerundent.
4
Sind die Ziffern m0 = m1 = . . . = ml−1 = b − 1, so tritt bei der Addition von b−(l−1) ein Überlauf in allen
Stellen auf. Die entstehende Mantisse 10.0 . . . hat l + 1 Stellen. In diesem Fall schiebt man das Komma eine
Stelle nach links, schneidet die letzte 0 ab und erhöht e um 1.
Schließlich setzt man
rd(x) := m·b
e e,
falls E1 ≤ e ≤ E2 .
(8)
In den Fällen, in denen e < E1 ist, spricht man von Exponentenunterlauf (underflow). Dies bedeutet,
das die berechnete Zahl so klein wird, daß sie sich nicht mehr im darstellbaren Zahlenbereich des Rechners
befindet und als 0 interpretiert wird. Ist beispielsweise b = 2, l = 8 und E1 = −64, so gilt
¡
¢
¡
¢
rd (1.0001000)2 · 2−64 − (1.0000000)2 · 2−64 = rd (1.0000000)2 · 2−68 = 0.
Ist e > E2 spricht man von Exponentenüberlauf (overflow). Es sei bemerkt, daß die Behandlung von
underflow und overflow rechnerabhängig ist. Besonders pathologische Fälle treten auf, wenn ein overflow
erst nach dem Runden eintritt: ist b = 10, l = 8 und E2 = 64, so würde 9.99999997·1064 nach (6), (8) auf
1.0000000·1065 gerundet, was keine Maschinenzahl ist.
Die Rundungsvorschriften (6) und (8) entsprechen im Dezimalsystem genau unserer üblichen Rundung.
(Bitte machen Sie sich dies anhand einiger Beispiele klar!) Da |m| ≥ 1 folgt für den relativen Fehler
¯
¯
¯ rd(x) − x ¯
¯
¯≤
¯
¯
x
b
2
· b−l
b
1
≤ · b−l = · b−l+1 =: eps.
|m|
2
2
(9)
Dies gilt auch bei Verwendung von round to even. Dabei ist vorausgesetzt, daß kein overflow oder underlow
auftritt und x 6= 0 ist. Die Zahl eps := 12 b−l+1 heißt Maschinengenauigkeit. Ist b = 2, so ist eps = 2−l ,
und für b = 10 gilt eps = 21 · 10−l+1 . Mit dieser Abkürzung kann man auch schreiben:
rd(x) = x(1 + ε)
2.3
mit |ε| ≤ eps.
(10)
Die arithmetischen Operationen für Gleitpunktzahlen
Die Einzelheiten in der Ausführung der arithmetischen Operationen +, −, ·, / sind von Maschine zu Maschine
verschieden. Bestenfalls kann man erwarten, daß das exakte Resultat einer Operation x∗y mit ∗ ∈ {+, −, ·, /}
durch ein im vorhergehenden Abschnitt beschriebenes optimal gerundetes Resultat rd(x ∗ y) ersetzt wird. Im
folgenden wird beschrieben, wie man dies durch Verwendung eines doppelt langen Akkumulators erreichen
kann.
+,3
−, 3
· ,3
/ bezeichnen wir die auf dem Rechner implementierten arithmetischen Operationen und die
Mit 3
Operanden mit x = mx ·bex ∈ IM, y = my ·bey ∈ IM.
Zunächst betrachten wir die Addition und Subtraktion. Dabei sei o.B.d.A. |x| ≥ |y| vorausgesetzt. Zunächst
wird ex − ey berechnet. Es sind zwei Fälle zu unterscheiden:
Fall 1: ex − ey > l: In diesem Fall sind die l signifikanten Stellen des Ergebnisses (nach Rundung) identisch
mit denen von x und folglich wird
rd(x + y) := x.
Fall 2: ex − ey ≤ l: Die Mantisse my von y wird auf dem doppelt langen Akkumulator (das sind 2 · l
Speicherzellen) um ex − ey Stellen nach rechts verschoben (dies entspricht einer Division durch bex −ey ), und
die exakte Summe mx +my·b−(ex −ey ) berechnet. Durch Verschiebung nach links oder rechts wird diese Summe
mit einer Potenz von b so multipliziert, daß die Mantisse normalisiert ist. Entsprechend dieser Verschiebung
5
wird der Exponent des Ergebnisses geändert. Zum Schluß rundet man die 2 · l-stellige Mantisse entsprechend
der implementierten Rundung auf l Stellen.
Einige Beispiele sollen diesen Vorgang klarmachen. Wir benutzen dabei die 4-stellige dezimale Gleitpunktarithmetik, also l = 4, b = 10. Der Exponentenbereich soll groß genug angenommen werden, so daß kein
overflow oder underflow entsteht.
6.314·104 + 3.865·101 = 6.3140000·104 + 0.0038650·104 = 6.3178650·104
Die exakte Summe wird auf 6.318·104 gerundet.
7.418·104 + 6.158·104 = 7.4180000·104 + 6.1580000·104 = 13.5760000·104 = 1.3576000·105
Die exakte Summe wird zum Endergebnis 1.358 · 105 gerundet.
1.005·10−4 − 9.963·10−5 = 1.0050000·10−4 − 0.9963000·10−4 = 0.0087000·10−4 = 8.700·10−7
Die exakte Summe ist eine Maschinenzahl und muß nicht gerundet werden. Bei diesem letzten Beispiel heben
sich die ersten drei von vielen signifikanten Ziffern auf. Man spricht in diesem Fall von Auslöschung. Man
beachte aber, daß im Fall der Auslöschung die berechnete Summe immer exakt ist. Dies soll besonders
herausgestellt werden, da man üblicherweise bei Auslöschung an einen Genauigkeitsverlust denkt. In welchem
Zusammenhang Auslöschung und Genauigkeitsverlust trotzdem stehen, wird später geklärt.
Wie man sieht, wird bei der Durchführung von Addition und Subtraktion mit doppelt langem Akkumulator
exakt gerechnet und ganz am Ende einmal gerundet. Der dabei gemachte Rundungsfehler ergibt sich also
nur aus der implementierten Rundungsvorschrift. Dementsprechend gilt (vgl. (10)):
+ y := rd(x + y) = (x + y)(1 + ε)
x3
mit |ε| ≤ eps
(11)
− y := rd(x − y) = (x − y)(1 + ε)
x3
mit |ε| ≤ eps.
(12)
· y berechnet man auf einem doppelt langen Akkumulator, in dem man zunächst die Summe
Das Produkt x 3
ex + ey bildet, das 2 · l-stellige exakte Produkt berechnet und gegebenenfalls um eine Stelle nach rechts
verschiebt. Anschließend wird wieder auf l Stellen gerundet.
2.213·10−2 · 8.714·10−4 = 19.284100·10−6 = 1.9284100·10−5
Das exakte Produkt wird zum Endergebnis 1.928·10−5 gerundet. Genauso wie bei der Addition erhalten wir
demnach
· y := rd(x · y) = x · y(1 + ε)
x3
mit |ε| ≤ eps.
(13)
/ y, y 6= 0 wird gebildet, indem zunächst e
Der Quotient x 3
x − ey berechnet wird. Die Mantisse mx wird
auf die ersten l Stellen des doppeltlangen Akkumulators gelegt. Nun dividiert man den Akkumulatorinhalt
durch die Mantisse my , normalisiert und rundet auf l Stellen. Offenbar gilt auch hier
/ y := rd(x/y) = (x/y)(1 + ε)
x3
mit |ε| ≤ eps.
(14)
Zusammenfassend können wir feststellen, daß bei Implementierung der optimalen Rundungsvorschrift (6),
(8) und unter Benutzung eines doppeltlangen Akkumulators die arithmetischen Grundoperationen +, −, ·, /
im Rahmen der zugrunde liegenden Maschinenzahlen bestmöglich implementiert werden können. Mit etwas
mehr Aufwand kann das gleiche Ergebnis mit einem etwas kürzeren Akkumulator erreicht werden. In jedem
Fall wird das exakte Ergebnis durch die am nächsten gelegene Maschinenzahl ersetzt.
6
Bei vielen heutigen Anlagen sind jedoch die Rundung und die arithmetischen Grundoperationen nicht optimal
implementiert. Es gelten dann lediglich Abschätzungen der Form
± y = x(1 + ε ) ± y(1 + ε )
x3
x
y
mit |εx |, |εy | ≤ k · eps,
(15)
wobei k eine kleine natürliche Zahl ist.
2.4
Bemerkungen und Beispiele
Die im vorhergehenden Abschnitt geschilderten Gleitpunktoperationen könnten den Eindruck erwecken, daß
zumindest bei optimaler Rundungsvorschrift kaum nennenswerte Fehler auftreten. Aber leider sind schon die
einfachsten Grundgesetze wie Assoziativ- und Distributivgesetze auf einem Rechner nicht erfüllt. Sie können
leicht nachprüfen, daß z.B. ein Rechner mit 8 Stellen in der Mantisse (b=10) für a = 2.3371258·10−4 , b =
3.3678429·102 , c = −3.3677811·102 die folgenden Ergebnisse berechnet:
−4 +
+ (b 3
+ c) = 2.3371258·10
a3
3 6.1800000·10−3 = 6.4137126·10−3
(16)
2 −
+ b) 3
+ c = 3.3678452·10 3
(a 3
3.3677811·102 = 6.4100000·10−3 .
(17)
Das exakte Resultat ist a+b+c = 6.41371258·10−3 . Entsprechendes gilt für das Distributivgesetz (Aufgabe!).
Da schon diese einfachen Gesetze keine Gültigkeit haben, sind natürlich auch sehr viele Folgerungen wie
Kürzungsregeln usw. im Allgemeinen nicht erfüllt. Es kann also in einigen Fällen sehr wesentlich sein, auf
welche Weise und insbesondere in welcher Reihenfolge algebraische Ausdrücke in ein Programm umgesetzt werden.
Ein besonders unangenehmes Phänomen der Gleitpunktrechnung ist die Auslöschung. Wir haben bereits
im vorhergehenden Abschnitt gesehen, daß bei der Auslöschung die berechnete Summe immer exakt ist
(und somit kein Rundungsfehler gemacht wird) und doch signifikante Ziffern verloren gehen. Dies führt
zu großen Fehlern, wenn die Operanden bereits vorher rundungsfehlerbehaftet sind. Sind beispielsweise in
fünfstelliger Gleitpunktarithmetik vier Maschinenzahlen
x1 = 3.4512·103
x3 = 2.7835·103
x2 = 2.8991·102
x4 = 3.5916·102
gegeben, so haben die exakten Produkte die Gestalt
x1 · x2 = 1.000537392·106
x3 · x4 = 9.9972186·105 .
Für die exakte Differenz gilt x1 · x2 − x3 · x4 = 8.15532·102 . Auf einer Maschine mit optimaler Rundung wird
zunächst
6
· x = 1.0005·10
x1 3
2
5
· x = 9.9972·10
x3 3
4
berechnet, dann subtrahiert und gerundet
2
· x ) 3
· x ) = 7.8000·10 .
(x1 3
2 − (x3 3
4
(18)
Der Vergleich dieser beiden Resultate zeigt, daß das gleitpunktmäßig errechnete Ergebnis (18) keine einzige
korrekte Ziffer wiedergibt.
7
Ein in der Praxis häufig auftretendes Problem ist die Bestimmung von Funktionswerten, wobei die Potenzreihenentwicklung der Funktion bekannt ist. Ein besonders einfaches Beispiel ist die Taylorreihe der
Exponentialfunktion
x2
x3
xn
ex = 1 + x +
+
+ ... +
+ ...
2!
3!
n!
Aus der Analysis ist bekannt, daß ex eine ganze Funktion ist und für jeden Wert x ∈ IR konvergiert.
Es soll der Wert ex an der Stelle x = −5.5 berechnet werden. Rechnet man in fünfstelliger dezimaler
Gleitpunktarithmetik die ersten 25 Summanden aus und addiert diese, so erhält man
xn
n!
e−5.5
Die Koeffizienten
xn
n!
=
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Zwischensumme sn =
n
P
k=0
1.00000000000000
- 5.50000000000000
15.12500000000000
-27.72900000000000
38.12700000000000
-41.94000000000000
38.44500000000000
-30.20700000000000
20.76700000000000
-12.69100000000000
6.98010000000000
- 3.49010000000000
1.59960000000000
- 0.67676000000000
0.26587000000000
- 0.09748700000000
0.03351100000000
- 0.01084200000000
0.00331290000000
- 0.00095899000000
0.00026372000000
- 0.00006906800000
0.00001726700000
- 0.00000412910000
0.00000094627000
xk
k!
1.00000000000000
- 4.50000000000000
10.62500000000000
-17.10400000000000
21.02300000000000
-20.91700000000000
17.52800000000000
-12.67900000000000
8.08800000000000
- 4.60300000000000
2.37710000000000
- 1.11300000000000
0.48660000000000
- 0.19016000000000
0.07571000000000
- 0.21777000000000
0.01173400000000
0.00089200000000
0.00420490000000
0.00324590000000
0.00350960000000
0.00344050000000
0.00345780000000
0.00345370000000
0.00345460000000
wurden in fünfstelliger Gleitpunktarithmetik nach der Rekursionsformel
xn−1
x
xn
=
·
n!
(n − 1)! n
ausgewertet. In Wirklichkeit gilt aber e−5.5 = 4.0867 . . . · 10−3 . Exaktes Ergebnis und die näherungsweise berechnete Summe stimmen in keiner Ziffer der Mantisse überein. Was läuft in diesem Beispiel falsch?
Zunächst beobachtet man, daß die einzelnen Summanden durch die Multiplikationen und Divisionen bestenfalls 5 signifikante Ziffern besitzen und diese teilweise in einer Größenordnung von 102 liegen. Das berechnete
Ergebnis besitzt die Größenordnung 10−2 und somit die gleiche Größenordnung wie beispielsweise die nicht
signifikante Ziffer 7 der Zahl 3.8127·101 . Offenbar tritt hier ebenfalls, allerdings subtiler, das Phänomen der
8
Auslöschung auf. Bessere Ergebnisse können bei diesem Algorithmus offenbar nur mit höherer Genauigkeit
erzielt werden. Allerdings wird dadurch die Rechenzeit beträchtlich erhöht. Einen guten Algorithmus erhält
man aus der Formel e−x = e1x :
e−5.5 =
1
e5.5
=
1
= 0.0040865
1 + 5.5 + 15.125 + . . .
in fünfstelliger Dezimalarithmetik.
In der Summe im Nenner tritt keine Auslöschung mehr auf, das berechnete Resultat besitzt nur noch einen
Fehler von 0.007%. Dieser Restfehler ist einzig die Summe der Rundungsfehler der Multiplikationen, Divisionen und Additionen.
Auf vielen Rechenanlagen ist die Exponentialfunktion als Standardfunktion vorhanden. Üblicherweise wird
sie berechnet, indem zunächst x = x
e + n mit n ∈ ZZ, 0 ≤ x
e < 1 dargestellt wird und das Additionstheorem
x
x
e+n
x
e
n
e =e
= e · e benutzt wird.
In vielen praktischen Situationen treten transzendente Funktionen auf, die standardmäßig nicht auf Rechnern
vorhanden sind, aber deren Potenzreihenentwicklung bekannt ist. In solchen Fällen sollte man die Potenzreihendarstellung und Gesetzmäßigkeiten dieser Funktion genau untersuchen, bevor ein Algorithmus konzipiert
wird.
2.5
Fehlerfortpflanzung während der Rechnung
Besteht eine numerische Rechnung aus vielen Rechenoperationen, dann pflanzen sich die Rundungsfehler
von Schritt zu Schritt fort. Das letzte Beispiel (Bestimmung von e−5.5 ) demonstriert eindrucksvoll, daß diese
Fehlerfortpflanzung zu völlig falschen Resultaten führen kann. Daher haben sich zahlreiche Mathematiker
mit der Theorie der Fehlerfortpflanzung für verschiedene Probleme und Algorithmen befaßt. Diese Theorien
sind für viele Problemstellungen sehr tiefliegend und können im Rahmen dieses Praktikums nicht behandelt
werden. Hier sollen nur zwei sehr einfach zusammengesetzte Gleitpunktoperationen untersucht werden.
Im folgenden setzen wir voraus, daß während der Rechnung kein overflow oder underflow eintritt. Betrachten
· x 3
· x , wobei die x Maschinenzahlen sind. Wird
wir zunächst das zusammengesetzte Produkt x1 3
2 · ... 3
n
i
die Multiplikation in der Reihenfolge ausgeführt, in der sie geschrieben ist (also von links nach rechts), so
gilt nach Formel (13)
p1 = x1
· x = x · x (1 + ε )
p2 = x1 3
2
1
2
2
..
.
· x = x · x · . . . · x (1 + ε ) · (1 + ε ) · . . . · (1 + ε ).
pr = pr−1 3
r
1
2
r
2
3
r
Für das mit Gleitpunktoperationen berechnete Produkt erhält man somit
· x 3
· x
pn := x1 3
2 · ... 3
n = x1 · x2 · . . . · xn (1 + ε2 ) · (1 + ε3 ) · . . . · (1 + εn ).
Wegen |εi | ≤ eps für i = 2, . . . , n gilt
(1 − eps)n−1 ≤ (1 + ε2 ) · (1 + ε3 ) · . . . · (1 + εn ) ≤ (1 + eps)n−1 ,
und es folgt die Fehlerabschätzung
mit (1 − eps)n−1 ≤ 1 + F ≤ (1 + eps)n−1 .
· x 3
· x
x1 3
2 · ... 3
n = x1 · x2 · . . . · xn · (1 + F )
9
(19)
Ist beispielsweise eps = 2−l und n − 1 deutlich kleiner als l, so ist der relative Fehler des Produkts klein.
Obwohl der errechnete Wert des Produkts von der Reihenfolge abhängt, in welcher die Multiplikation ausgeführt wird (Assoziativ- und Distributivgesetze haben keine Gültigkeit!), ist die Fehlerabschätzung (19)
offenbar unabhängig von dieser Reihenfolge.
Ein in der Praxis häufig auftretendes Problem ist die Addition mehrerer Zahlen. Gerade für solche Probleme
werden Vektorrechner gebaut. Bei der Berechnung von Summen kann nicht mehr angenommen werden, daß
das berechnete Ergebnis einen nur kleinen relativen Fehler besitzt, obwohl dies für die Summe zweier Zahlen
noch richtig ist, falls die optimale Rundungsvorschrift benutzt wird. Besäße die Summe mehrerer Zahlen
+ x 3
+ x
einen kleinen relativen Fehler, so müsste x1 3
2 + ... 3
n gleich
(x1 + x2 + . . . + xn )(1 + ε)
+ ... 3
+ x
sein. Ist die exakte Summe x1 + . . . + xn oder die berechnete Summe x1 3
n gleich Null, so ist obige
Gleichung meist für kein ε mit |ε| < 1 erfüllt. Aus (11) erhält man eine Fehlerabschätzung anderer Natur,
wobei |εi | ≤ eps:
s1 = x 1
+ x = (s + x )(1 + ε )
s2 = x 1 3
2
1
2
2
..
.
+ x = (s
sr = sr−1 3
r
r−1 + xr )(1 + εr ).
Multipliziert man diese Beziehung explizit aus, so folgt
sn = x1 (1 + η1 ) + x2 (1 + η2 ) + . . . + xn (1 + ηn )
(20)
mit
1 + η1 = (1 + ε2 ) · (1 + ε3 ) · . . . · (1 + εn )
1 + ηr = (1 + εr ) · . . . · (1 + εn ),
r = 2, . . . , n
und
(1 − eps)n−1 ≤ 1 + η1 ≤ (1 + eps)n−1
(1 − eps)n−r+1 ≤ 1 + ηr ≤ (1 + eps)n−r+1 ,
r = 2, . . . , n.
Wie man sieht, sind die Fehlerschranken von der Reihenfolge der Summation abhängig. Die
obere Schranke für den Gesamtfehler ist am kleinsten, wenn man die Summanden in der Reihenfolge aufsteigender Beträge addiert, da dann der größtmögliche Faktor 1 + η1 mit den kleinsten xi multipliziert wird. Die
Fehlerabschätzung (20) kann gedeutet werden als die exakte Summe von leicht gestörten Daten xi (1 + ηi ),
denn die Faktoren (1 + ηi ) liegen sehr nahe bei 1, falls n − r klein im Verhältnis zu l ist.
3
Kondition eines Problems und Kondition eines Verfahrens
Man nennt ein mathematisches Problem gut konditioniert, wenn eine geringe relative Störung der Eingabedaten des Problems auch nur eine geringe relative Änderung der Lösung des Problems zur Folge hat. Kann
dagegen eine geringe relative Änderung der Eingabedaten eine große relative Änderung des Ergebnisses zur
Folge haben, so nennt man das Problem schlecht konditioniert.
10
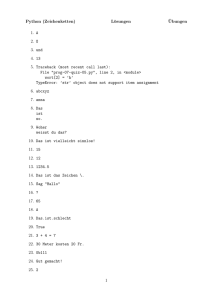
Gut konditioniertes Problem
P
Pe
.
.
.
.
E=x
e=x
E
e
Gleichungssystem Ax = b
P = (A, b) , E = x = A−1 b
Ein numerisches Verfahren zur Lösung eines mathematischen Problems heißt gut konditioniert, wenn
seine Lösung die exakte Lösung eines mathematischen Problems ist, das aus dem ursprünglichen mathematischen Problem durch geringe relative Änderung der Eingabedaten hervorgeht. Andernfalls heißt das
numerische Verfahren schlecht konditioniert. Es ist sehr wesentlich, zwischen der Kondition eines mathematischen Problems und der Kondition eines numerischen Verfahrens zu unterscheiden. Während man bei
einem schlecht konditionierten Verfahren in fast allen Fällen ein besseres Verfahren entwickeln kann, lassen
sich bei schlecht konditionierten Problemen i.a. nur durch Erhöhung der Eingabe- und Rechengenauigkeit
bessere Resultate erzielen.
Gut konditionierter Algorithmus
P
Pe
.
.
.
.
E=x
e=x
E
e
z.B. GAUß-Algorithmus mit floating point Rechnung
Die beiden in der Einleitung angegebenen Beispiele (1) und (2) sind typisch schlecht konditionierte Probleme. Beispielsweise muß der erste Koeffizient 1050 in der Summe (1) nur um −1323 (das entspricht einer
relativen Störung von 10−47 ) gestört werden, damit der vom Rechner berechnete Wert 0 der exakte Wert
der Summe ist. Auf praktisch keinem Rechner ist diese relative Änderung überhaupt eingebbar, da dazu
eine Mantissenlänge von wenigstens 48 Dezimalstellen (oder eine entsprechende Anzahl von Binärstellen)
notwendig wäre.
Obwohl das Problem der Summation dieser speziellen Zahlen extrem schlecht konditioniert ist (die relative
Änderung 10−47 entspricht dem Verhältnis von einem einzigen Gramm zu etwa 1014 = 100000000000000
Sonnenmassen), ist das Verfahren der Summation gut konditioniert: Für jede beliebige Summe ist das
errechnete Gleitpunktergebnis nach (20) gleich der exakten Summe geringfügig gestörter Eingabedaten. Es
liegt also ein gut konditioniertes Verfahren, aber ein schlecht konditioniertes Problem vor.
Betrachtet man nun die Berechnung von e−5.5 , so erkennt man aus den Eigenschaften und dem Verhalten der
Exponentialfunktion sofort, daß es sich um ein gut konditioniertes mathematisches Problem handelt. Und
wir haben gerade gesehen, daß die Summation ein gut konditioniertes Verfahren ist! Hier tritt ein scheinbarer Widerspruch auf, denn ein gut konditioniertes Problem und ein dazu gut konditioniertes numerisches
Verfahren müssen relativ gute Ergebnisse liefern.
11
Dieser scheinbare Widerspruch läßt sich aufklären. Die Bestimmung von e−5.5 kann nicht als einfache Additin
on von unabhängigen Summanden xn! aufgefaßt werden. Vielmehr ist jeder dieser Summanden abhängig
von dem einzigen Eingabewert −5.5 und nur dieser Eingabewert und die Störung diese Eingabewertes kann
zur Beurteilung des Verfahrens herangezogen werden. Denn eine geringfügige Störung des Eingabeparameters
−5.5 ändert den Wert e−5.5 ebenfalls geringfügig (das Problem ist also gut konditioniert), es ändert den
i
Wert der Gleitpunktsumme der xi! allerdings bis zur Unkenntlichkeit. Dieses Verfahren für die Berechnung
von ex , x negativ, ist also schlecht konditioniert.
4
Fehleranalyse
Viele mathematische Probleme und Algorithmen wurden hinsichtlich ihres Verhaltens gegenüber Eingabefehlern und Rundungsfehlern während der Rechnung untersucht. Dabei sind die Vorwärtsanalyse (forward
analysis) und die Rückwärtsanalyse (backward analysis) zwei Hauptuntersuchungsformen, die häufig
benutzt werden.
Bei der Vorwärtsanalyse versucht man eine Abschätzung für die Differenz zwischen exaktem und berechnetem
Ergebnis zu erhalten. Eine solche Abschätzung kann berechnet werden, indem der Fehler jedes einzelnen
Rechenschritts abgeschätzt wird. In vielen Fällen sind solche Abschätzungen sehr pessimistisch, da immer
der schlimmste Fall (worst case) mit berücksichtigt werden muß.
Bei der Rückwärtsanalyse bemüht man sich dagegen, an bestimmten Stellen der Rechung zu zeigen, daß
der berechnete Wert der exakte Wert eines leicht gestörten Problems ist. Man überprüft also die Gutartigkeit des numerischen Verfahrens. In der Anwendung erweist sich die Rückwärtsanalyse häufig als leichter
durchführbar.
Andererseits ist die Rückwärtsanalyse in gewisser Weise nicht vollständig, da man letztlich immer die Differenz zwischen der berechneten und exakten Lösung kennenlernen möchte. Die Fehlerabschätzung (19) für das
· . . .3
· x
Produkt x1 3
n ist eine Vorwärtsanalyse, während es sich bei der Fehlerabschätzung für die Berechnung
+
+ x
der Summe x1 3 . . . 3
n um eine Rückwärtsanalyse handelt.
Wir wollen zu der obigen Definition einige weitere Beispiele betrachten:
1. Beispiel: Die Ihnen aus der Schule bekannte quadratische Gleichung
ax2 + bx + c = 0,
a, b, c ∈ IR,
a 6= 0
besitzt genau die beiden Werte
x1 =
−b +
√
b2 − 4ac
,
2a
x2 =
−b −
√
b2 − 4ac
2a
als Lösungen. Die Lösungen x1 , x2 hängen stetig von den Eingabekoeffizienten a, b, c ab. Dies legt die Vermutung nahe, daß eine Implementierung dieser Formel auf einem Rechner zu keinen großen numerischen
Problemen führen sollte.
Im folgenden wird eine dezimale Gleitpunktarithmetik mit l = 8 und E1 = −50, E2 = 50 benutzt.
Fall 1: a = 1, b = −105 , c = 1
Die exakten Lösungen dieser quadratischen Gleichung, auf 11 signifikante Stellen optimal gerundet, sind
x1 = 99999.999990
x2 = 0.000010000000001.
12
Benutzt man obige Formel, so liefert der Modellrechner die Näherungen
x
e1 = 100000.00
x
e2 = 0.
Die Näherung x
e2 = 0 hat mit der wahren Lösung x2 ≈ 10−5 keine gemeinsame signifikante Ziffer und ist
somit ein völlig falsches Näherungsresultat. Es ist unmittelbar klar, daß Auslöschung aufgetreten ist:
√
√
Es ist −b − b2 − 4a = 105 − 1010 − 4. Die Subtraktion vor der Wurzel wird ohne Fehler ausgeführt, der
eigentliche Fehler ist der Rundungsfehler 1010 −4 ≈ 1010 in 8-stelliger Rechnung. Stört man die Eingabedaten
a, b, c nur geringfügig, so ändern sich offenbar die exakten Lösungen ebenfalls geringfügig. Das Problem ist
gut konditioniert, und demnach muß der Algorithmus schlecht konditioniert sein.
Ein besserer Algorithmus, der die Auslöschung vermeidet, stellt zunächst eine der Lösungen in der Form
√
b + sign(b) b2 − 4ac
x1 = −
2a
dar, wobei sign(b) das Vorzeichen von b ist. Aus
ax2 + bx + c = a(x − x1 )(x − x2 )
folgt sofort ax1 x2 = c, und es ergibt sich für die zweite Lösung
x2 =
c
.
a · x1
Für den obigen Fall a = 1, b = −105 , c = 1 erhält man bei Anwendung dieser Formeln die beiden guten
Näherungslösungen x
e1 = 100000.00, x
e2 = 0.000010000000.
Fall 2: a = 1.0000000, b = −4.0000000, c = 3.9999999.
Die exakten Lösungen dieser quadratischen Gleichung, auf 11 signifikante Stellen optimal gerundet, sind
x1 = 1.9996837720
x2 = 2.0003162280.
In unserem Modellrechner erhält man bei Anwendung der obigen Formel bei beiden Versionen
x
e1 = x
e2 = 2.0000000.
Diese beiden Näherungslösungen stimmen nur in den ersten 4 Stellen mit den exakten Lösungen überein,
obwohl die (nur wenigen) Rechenoperationen mit achtstelliger Genauigkeit durchgeführt sind. Diese Näherungslösungen sind exakte Lösungen der quadratischen Gleichungen
x2 − 4x + 4 = 0.
Die Koeffizienten a und b dieser Gleichung sind identisch mit denen der obigen Gleichung. Lediglich c unterscheidet sich um δ := 0.0000001. Wir setzen ε2 := δ. Die berechneten Lösungen sind also die exakten
Lösungen einer sehr leicht gestörten Gleichung. Demnach ist der Algorithmus für dieses Problem gut konditioniert. Die verlorengegangenen Stellen können nur durch die schlechte Kondition des Problems verursacht
werden: Die Originalgleichung hat die Gestalt
x2 − 4x + 4 − ε2 = 0
und besitzt die Nullstellen 2 + ε, 2 − ε. Ändert man c in der Größenordnung ε2 , so ändern sich die Lösungen
in der Größenordung von ε.
13
Die quadratische Gleichung ist immer dann schlecht konditioniert wenn Auslöschung bei der Berechnung von
b2 − 4ac auftritt, d.h. wenn die beiden Nullstellen nahe beieinanderliegen.
2. Beispiel: Das Gleichungssystem
1.2969 · x + 0.8648 · y = 0.8642
0.2161 · x + 0.1441 · y = 0.1440
besitzt die exakten Lösungen
x = 2, y = −2.
Nehmen wir an, wir hätten mit Hilfe eines numerische Verfahrens die Näherungslösungen
x
e = 0.9911, ye = −0.4870
erhalten. Die Näherung und exakte Lösungen besitzen keine gemeinsamen signifikanten Stellen. Man könnte
zunächst glauben, das numerische Verfahren sei schlecht konditioniert. Setzt man aber die Näherungslösung
in das Gleichungssystem ein, so erhält man die neue rechte Seite
eb1 = 0.86419999
eb2 = 0.14400001
Die beiden rechten Seiten unterscheiden sich in jeder Komponente nur um den Betrag 10−8 . Das bedeutet, daß das benutzte numerische Verfahren für dieses Problem eine Lösung berechnet, die im Sinne der
Rückwärtsanalyse hervorragend ist. Das Verfahren ist demnach für dieses Problem sehr gut konditioniert.
Es folgt, daß das Gleichungssystem sehr schlecht konditioniert ist.
3. Beispiel: Zur Berechnung der Integrale
Z1
xn ex−1 dx
In =
für n = 1, 2, 3, . . .
0
können die bekannten numerischen Integrationsverfahren (Trapezregel, Simpsonregel, . . . ) benutzt werden.
Mit partieller Integration
Z1
Z1
¯1
n x−1
n x−1 ¯
x e
dx = x e
¯ − n · xn−1 ex−1 dx
0
0
0
erhält man die Iterationsformel
In = 1 − n · In−1
n = 1, 2, . . . und I1 =
1
.
e
Eine andere Möglichkeit für die numerische Berechnung der obigen Integrale bietet sich mit der Auswertung
dieser einfachen Iterationsvorschrift an. Bei Berechnung mit 6 Dezimalstellen erhält man
I1 ≈ 0.367879
I6 ≈ 0.127120
I2 ≈ 0.264242
I7 ≈ 0.110160
I3 ≈ 0.207274
I8 ≈ 0.118720
I4 ≈ 0.170904
I9 ≈ −0.0684800.
I5 ≈ 0.145480
Obwohl der Integrand x9 ex−1 positiv auf dem gesamten Intervall (0, 1) ist, ist der berechnete Näherungswert negativ, also völlig falsch. Das Problem ist gut konditioniert, denn der Integrand xn ex−1 ist beliebig
14
oft differenzierbar, und eine leichte Störung der Integralgrenzen kann keine großen Auswirkungen auf den
Integralwert zur Folge haben. Demnach muß der Algorithmus sehr schlecht konditioniert sein. Warum?
Bei der Eingabe des Startwertes I1 = 1e wurde ein kleiner Fehler (Konvertierungsfehler) der Größenordnung
4·10−7 gemacht. Bei der Berechnung von I2 wurde dieser Fehler mit dem Faktor −2 multipliziert. Dieser
Fehler wiederum wurde bei der Berechnung von I3 mit dem Faktor −3 multipliziert. So fortfahrend folgt,
daß schließlich der Fehler bei der Berechnung von E9 die Größenordnung
(−2) · (−3) · . . . · (−9) · 4·10−7 = 9! · 4·10−7 = 362880 · 4·10−7 ≈ 0.15
besitzt. Der auf drei signifikante Stellen gerundete exakte Wert von I9 ist 0.0916. Wenn man zu dem berechneten Wert I9 ≈ −0.068 den sehr großen Fehler 0.15 dazu addiert, erhält man ungefähr den exakten
Wert.
Das obige Iterationsverfahren ist demnach ein äußerst instabiler Algorithmus. Man spricht in einem solchen
Fall auch von Fehlerexplosion. Aus fehlerexplosiven Verfahren können sehr häufig stabile, fehlerdämpfende
Verfahren entwickelt werden. Falls die obige Iterationsformel in der Form
In−1 =
1 − In
,
n
n = . . . , 3, 2,
also rückwärts geschrieben wird, dann wird der Fehler in jedem Iterationsschritt mit dem Faktor 1/n multipliziert. Wählt man beispielsweise als Startwert I20 = 0, so liefert diese Rückwärtsiteration die Näherung
I20 ≈ 0.0
I14 ≈ 0.0627322
I19 ≈ 0.0500000
I13 ≈ 0.0669477
I18 ≈ 0.0500000
I12 ≈ 0.0717733
I17 ≈ 0.0527778
I11 ≈ 0.0773523
I16 ≈ 0.0557190
I10 ≈ 0.0838771
I15 ≈ 0.0590176
I9 ≈ 0.0916123.
Man zeigt leicht, daß schon für I15 der Fehler beim Start durch das fehlerdämpfende Verfahren verschwunden
ist und alle Werte I15 bis I9 6 signifikante Stellen besitzen.
5
Ausblick und Literatur
Eine ausführliche Beschreibung der Rundungsfehleranalyse für normalisierte Gleitpunktarithmetik und ihre
Anwendung auf das Rechnen mit Polynomen und Matrizen findet man in dem Buch von Wilkinson [7]. In
diesem Buch wird auch die Rundungsfehleranalyse für Festpunktrechnung untersucht.
Bei der Festpunktrechnung ist die Lage des Dezimalpunktes an einer bestimmten Stelle in der Mantisse
fixiert. Die Angabe des Exponenten entfällt somit. Anwendung fand die Festpunktrechnung früher besonders
im kaufmännischen Bereich.
Im Vergleich zur Gleitpunktarithmetik sind die Fehlerabschätzungen der Festpunktarithmetik etwas günstiger, z.B. ist die Addition sogar assoziativ. Allerdings müssen der Rechnung eingehende Untersuchungen
vorausgehen, um sicherzustellen, daß die vorkommenden Festpunktzahlen den zulässigen Bereich nicht verlassen. Dies ist ein entscheidender Nachteil der Festpunktarithmetik. Behelfen kann man sich häufig durch
Einführung von Skalenfaktoren an vielen Stellen der Festpunktrechnung; dies entspricht aber dann einer
15
speziellen Art von Gleitpunktrechnung. Daher ist auf heutigen Rechenanlagen praktisch ausschließlich die
normalisierte Gleitpunktarithmetik implementiert.
In dem Buch von Kulisch und Miranker [4] wird die Gleitpunktarithmetik in eine mathematische Theorie
eingebettet und untersucht. Eine Konsequenz dieser Theorie ist es, zu den arithmetischen GrundoperatioPn
nen das Skalarprodukt i=1 ai · bi zweier Vektoren a, b ∈ IR als Grundoperation hinzuzufügen und gemäß
der optimalen Rundungsvorschrift auszuwerten. Diese Auswertung ist mit Hilfe eines mehrfach-langen AkPn
kumulators möglich. Mit dieser zusätzlichen Grundoperation können beispielsweise Summen i=1 xi oder
Produkte zweier Matrizen maximal genau berechnet werden.
Eine sehr vielversprechende Methode, eine automatische Rundungsfehleranalyse auf dem Rechner durchzuführen, ist die Intervallarithmetik. Hier wird jede auftretende Zahl x durch ein Intervall
[x, x] = {x ∈ IR | x ≤ x ≤ x}
ersetzt. Die arithmetischen Grundoperationen ∗ ∈ {+, −, ·, /} können in natürlicher Weise auf Intervalle
durch die Formel
[x, x] ∗ [y, y] := {z = x ∗ y | x ∈ [x, x], y ∈ [y, y]}
erweitert werden. Die Formeln sind leicht auf einem Rechner zu implementieren. Beispielsweise gilt für die
Addition
[x, x] + [y, y] = [x + y, x + y].
Eine sehr schöne Einführung in die Methoden der Intervallarithmetik findet man in den Büchern von Ahlefeld
und Herzberger [1] und von Moore [5].
Die Intervallarithmetik neigt allerdings zu Überschätzungs- und Aufblähungseffekten, wenn man ganz naiv
in einem Algorithmus reelle Zahlen und arithmetische Operationen durch Intervalle und obige Intervalloperationen ersetzt. Daher wurden für viele Problemstellungen spezielle Intervallalgorithmen entwickelt, bei
denen solche Aufblähungseffekte nicht Auftreten. In der Arbeit von Rump [6] sind Intervallalgorithmen beschrieben, die für viele Problemstellungen Ergebnisse liefern, die bis zur letzten Stelle der Mantisse genau
sind. Sämtliche Konvertierungs-, Rundungs- und Auslöschungsfehler werden also automatisch durch diese
Algorithmen erfasst und abgeschätzt.
Neuerdings wurden im Institut für Zuverlässiges Rechnen Algorithmen entwickelt, die darüber hinaus eine
automatische und garantiert richtige Sensitivitätsanalyse gestatten. Mit diesen Methoden werden nicht nur
alle Rundungsfehler erfaßt und abgeschätzt, sondern gleichzeitig die Richtigkeit der Problemstellung
überprüft.
Das Standardwerk bezüglich der Genauigkeit und Stabilität von Algorithmen ist das Buch von Highham
[2]. Hier wird auf das Verhalten von numerischen Algorithmen in Berechnungen mit endlicher Genauigkeit
eingegangen.
Literatur
[1] G. Alefeld and J. Herzberger. Einführung in die Intervallrechnung. B.I. Wissenschaftsverlag, 1974.
[2] N.J. Highham. Accuracy and Stability of Numerical Algorithms. Society for Industrial and Applied
Mathematics, 1961.
[3] ANSI/IEEE 754-1985, Standard for Binary Floating-Point Arithmetic, 1985.
16
[4] U. Kulisch and W.L. Miranker. Computer Arithmetic in Theory and Practice. Academic Press, New
York, 1981.
[5] R.E. Moore. Methods and Applications of Interval Analysis. SIAM, Philadelphia, 1979.
[6] S.M. Rump. Solving Algebraic Problems with High Accuracy. Habilitationsschrift. pages 51–120, 1983.
[7] J.H. Wilkinson. Rundungsfehler. 1969.
6
Versuchsbeschreibung und -durchführung
Aufgabe 1: Der Wert von
p2 − 2q 2
ist zu berechnen.
a) Berechnen Sie diesen für die Eingabedaten p = 665857.0 und q = 470832.0 mit MATLAB.
b) Stören Sie jeweils zweimal die Eingabedaten p, q in der letzten signifikanten Ziffer von p und q und
berechnen Sie den obigen Wert mit MATLAB erneut.
Aufgabe 2: Zu berechnen ist die Funktion
f (x, p) =
sinh(px) − px
p3
an der Stelle x = 1 für p = 10−4 , 10−8 , 10−10 . Verwenden Sie dazu in MATLAB die folgenden drei Algorithmen:
a) naive Auswertung von sinh(x),
b) Auswertung unter Beachtung von sinh(x) = 12 (ex − e−x ),
c) Auswertung der ersten drei Terme der Taylorreihe
f (x, p) =
x3
p2 x5
p4 x7
+
+
+ R(p, x).
3!
5!
7!
Aufgabe 3: Die folgenden algebraisch äquivalenten Ausdrücke
9x4 − y 4 + 2y 2
(3x2 − y 2 )(3x2 + y 2 ) + 2y 2
8x4 + (x2 + y 2 )(x2 − y 2 ) + 2y 2
2y 2 − y 4 + 9x4
9x4 + 2y 2 − y 4
9x4 − y 2 (y 2 − 2)
sollen ausgewertet werden.
a) Berechnen Sie diese Ausdrücke mit MATLAB für die Werte x = 10864.0, y = 18817.0.
17
b) Stören Sie die Eingabedaten x, y in der letzten Dezimalstelle und berechnen Sie die Werte der obigen
Ausdrücke für die gestörten Daten mit MATLAB.
Aufgabe 4: Das Integral
Z1
xn =
0
xn
dx,
x + 13
n = 0, 1, 2 . . .
genügt wegen
Z1
xn + 13xn−1 =
0
xn + 13xn−1
dx =
x + 13
der Iterationsformel
xn = −13xn−1 +
Z1
xn−1 dx =
0
1
n
1
.
n
Für den Startwert gilt
Z1
x0 =
0
¯1
1
¯
dx = ln(x + 13)¯ = ln(14) − ln(13).
x + 13
0
a) Berechnen Sie nach der obigen Iterationsformel mit MATLAB x0 , x1 , x2 , . . . , x20 .
b) Verwenden Sie die Iterationsformel rückwärts. Geben Sie sich einen Startwert x20 ihrer eigenen Wahl
vor.
Aufgabe 5: Die Lösung des linearen Gleichungssystems
64919121 · x − 159018721 · y = 2
41869520.5 · x − 102558961 · y = −5
ist zu berechnen.
a) Verwenden Sie dazu die Cramersche Regel und den Gauß-Algorithmus in MATLAB.
b) Stören Sie die Eingabedaten der Koeffizientenmatrix in der letzten Stelle und berechnen Sie die Lösung
mit den Formeln aus Teil a).
c) Was geschieht, wenn nur die rechte Seite gestört wird?
Aufgabe 6: Es soll die Lösung von
f (x) =
∞
X
i=0
xi
ex − 1
=
(i + 1)!
x
mit f (0) = 1
für x = 10−5 , 10−8 , 10−12 , 10−14 , 10−16 mit Hilfe der Exponentialfunktion berechnet werden.
a) Implementieren Sie hierzu einen naiven Algorithmus, welcher die Exponentialfunktion in MATLAB
nutzt.
b) Verwenden Sie nun den Algorithmus:
18
y=exp(x);
if y==1
f=1;
else
f=(y-1)/log(y);
end
f
Aufgabe 7: Lassen Sie die nächsten beiden Berechnungen in MATLAB ausführen.
for i = 1 : 60
√
x= x
end for i = 1 : 60
x = x2
end
Benutzen Sie dazu einmal 0 < x < 1 und einmal x > 1.
7
Auswertung und Überlegungen
Für alle Beispiele sollen die mit MATLAB berechneten Ergebnisse in übersichtlicher Form nebeneinander
dargestellt werden. Gestörte Eingabedaten sind jeweils mit anzugeben. In jedem Fall sollen die Konditionen
des Problems, die Kondition des Verfahrens und die auftretenden Fehler (Rundungs-, Auslöschungs- und
Konvertierungsfehler) schriftlich beurteilt werden.
8
Kurzeinführung MATLAB
Mit help topic können Sie sich Details zu dem Befehl, der Funktion oder dem Symbol topic anzeigen lassen.
Damit MATLAB Ergebnisse mit einer höheren Stellenanzahl anzeigt, sollten Sie zu Beginn Ihrer MATLAB
Sitzung einmal format long eingeben.
Zu Aufgabe 1:
Ein Semikolon hinter einer Zuweisung unterdrückt die Ausgabe.
>> p= 665857.0;
>> r= 4*2
r=
8
Mit der ↑-Taste können die letzten Befehle zurückgeholt werden.
help Befehl zeigt die Kurzhilfe an.
Zu Aufgabe 2:
Es ist möglich die Elemente eines Vektors elementweise zu berechnen.
Dabei sind die Befehle ./ ; .* ; .b zu verwenden.
>> x= 1; y=[2; 3; 4]; f= (y * x) ./ y . b 2 - factorial(3)
3!“ entspricht factorial(3)
”
19
Zu Aufgabe 3:
Man kann auch mehrere Gleichungen in einem Vektor speichern.
>> RESULT= [x-y; x b 2+y b 2; 3*x; -6]
Zu Aufgabe 4:
For-Schleifen und Ausgaben werden ähnlich wie in C realisiert.
>> for n=1:20
xn= xn*n b 2;
fprintf(’x%2g= %g\n’, n, xn)
end
ln 5“ entspricht log(5)
”
Zu Aufgabe 5:
2x2 Matrix:
Determinante:
Spaltenvertauschung:
Gauß-Algorithmus:
>>
>>
>>
>>
A= [1, 2; -3, 4];
det(A);
[b, A(:,2)]
x= A\b
Zu Aufgabe 6 + 7: Zum Berechnen der Exponentialfunktion und des Logarithmus
können folgende Befehle verwendet werden:
exp(x)
log(x)
Zum Quadrieren und Wurzelziehen bieten sich
sqr(x)
sqrt(x)
an.
20

![Dialog [xyz] ist auf Rechner [xyz] in Bearbeitung Beispiel: Diesen](http://s1.studylibde.com/store/data/011012503_1-7e690776633527b4aa4df9bf0d30036f-300x300.png)