1. Einleitung 2. Bewegung in homogenen, konstanten Feldern
Werbung

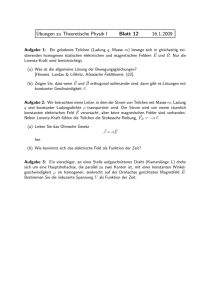
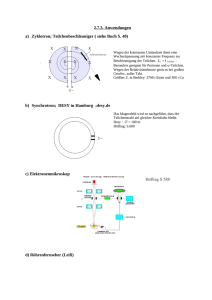
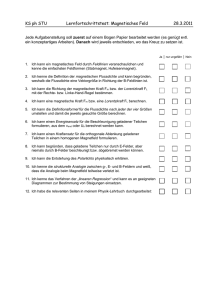
16 KAPITEL B Einteilchenbewegung 1. Einleitung Plasmen verhalten sich außerordentlich komplex. Neben der bekannten verwickelten Dynamik von Gasen hat man bei ihnen eine zusätzliche Verkomplizierung dadurch, daß zu den viskosen Kräften in den Navier-Stokes Gleichungen die elektromagnetischen Kräfte durch die selbstkonsistenten Felder hinzutreten. Man ist daher in praktisch allen Fällen auf Näherungen angewiesen. In den folgenden zwei Kapiteln behandeln wir die wichtigsten Näherungen: die Einteilchennäherung und die Flüssigkeitstheorie, im Kapitel B also die Einteilchennäherung, d.h. die Felder E(r,t) und B(r,t) werden als vorgegeben betrachtet. In ihnen bewegt sich ein geladenes Teilchen der Masse ma und der Ladung qa. Der Teilchensortenindex a steht für Elektronen (e), Ionen (i), Protonen (p), oder andere Teilchen. Die Aufgabe besteht darin, Geschwindigkeit va(t) und Ort ra(t) des Teilchens bei gegebenen Anfangsbedsingungen ra(0) = ro und va(0) = v0 zu berechnen. Grundlage der Berechnungen sind die Bewegungsgleichungen m d v a (t) = q a (E(r a (t), t) + v a (t) × B(r a (t), t)) dt mit (B.1) d r (t) = v (t). a a dt 2. Bewegung in homogenen, konstanten Feldern a) Homogenes, konstantes Magnetfeld Die Bewegungsgleichung wird für E = 0 und B = const • m a v a (t) = q a v a (t) × B Das Koordinatensystem wird so gewählt, daß die z-Achse in Richtung B weist: B = Bez (B > 0). Dann ist qaB • v a (t) = m v a (t) × e z a 17 Die Geschwindigkeit wird aufgeteilt in eine Komponente parallel und eine senkrecht zu B: v a (t) = ;v az (t)e z + v a⊥ (t) Dann folgt aus der Bewegungsgleichung für vaz • v az = 0; ⇒ ;v az =v 0z z a (t) = z 0 +v 0z t Die Bewegung wird vom Magnetfeld nicht beeinflußt. Für die Komponente senkrecht zum Magnetfeld erhält man qaB • v a⊥ = m v a⊥ × e z a Zur Abkürzung führt man die Zyklotron- oder Gyrationsfrequenz des Teilchens a im Magnetfeld B ein. qa B ωca = m a (B.2) Nach dieser Definition ist ωca stets positiv. Das Ladungsvorzeichen wird in einem Faktor εi = +1 für Ionen und εe = -1 für Elektronen gepackt, also q a = ε a q a . Damit ergibt sich • v a⊥ = ε a ωca v a⊥ × B (B.3) • Indem man Gl. (B.3) nach t ableitet und rechts für v a⊥ den ursprünglichen Ausdruck einsetzt, erhält man: •• v a⊥ = ε a ωca (ε a ωca v a⊥ × e z ) × e z = −ωca v a⊥ Dies ist eine Differentialgleichung von der Form einer Schwingungsgleichung, die mit dem Ansatz v a⊥ (t) = a cos ωca t + b sin ωca t (B.4) 18 gelöst wird. a und b sind Vektoren, die sich aus den Anfangsbedingungen ergeben. Aus Gl. (B.4) erhält man für t=0 v 0⊥ = a , aus der Ableitung von Gl. (B.4) • v a⊥ (t) = −ωca a sin ωca t + ωca b cos ωca t für t = 0 unter Verwendung von Gl. (B.3) ε a ωca v 0⊥ × e z = ωca b und damit für v a⊥ v a⊥ = v 0⊥ cos ωca t + ε a v 0⊥ × e z sin ωca t (B.5) v a⊥ = v 0⊥ , wie man durch skalare Multiplikation von v a⊥ mit sich selbst erkennt. (Man beachte, daß v 0⊥ × e z = v 0⊥ und v 0⊥ • (v 0⊥ × e z ) = 0 ). v 0⊥ rotiert also mit der Winkelgeschwindigkeit ωca. Die Bahn r a⊥ (t) wird durch Integration von Gl. (B.5) gewonnen. t v ε v 0⊥ × e z (−cos ωca t + 1) r a⊥ (t) = ∫ v a⊥ (t)dt = ω0⊥ sin ωca t + a ω ca ca 0 r a⊥ (t) = r a⊥ + ε a v 0⊥ × e z v 0⊥ v 0⊥ × e z ωca + ωca sin ωca t − ε a ωca ωca cos ωca t Für vz = 0 beschreibt das Teilchen eine Kreisbewegung um den Gyrationsmittelpunkt. v r ca = ω0⊥ ca (B.6) Abb. B.1: Der Umlaufsinn der Bahn von positiv bzw. negativ geladenen Teilchen im homogenen Magnetfeld Das Vorzeichen bewirkt, daß bei positiven Teilchen der Umlaufsinn mit B eine Linksschraube, bei negativen Teilchen, z.B. Elektronen eine Rechtsschraube bildet (Abb. B.1). 19 Für die Zyklotronfrequenz von Protonen erhält man eB = 1, 60 ⋅ 10 −19 As Vs B = 0, 958 ⋅ 10 8 B s −1 ωcp = m p T 1, 67 ⋅ 10 −27 kg m 2 T Um mit Hilfe von Gl. (B.6) einen typischen Gyrationsradius auszurechnen, benötigt man eine charakteristische Geschwindigkeit der Teilchen im Plasma. Als mittlere Geschwindigkeit führt man die thermische Geschwindigkeit der Teilchensorte a ein. v th,a = 2kT a ma (B.7) Hiermit wird der mittlere Gyrationsradius der Teilchensorte a v th,a r th,a = ω ca (B.8) z.B. für Protonen v th,p = r th,p = 2 ⋅ 1, 60 ⋅ 10 −19 VAs 1, 67 ⋅ 10 −27 kg kT = 1, 38 ⋅ 10 4 kT m eV eV s 1, 38 ⋅ 10 4 kT/eV ms = 1, 44 ⋅ 10 −4 kT T m 8 −1 eV B 0, 958 ⋅ 10 B/Ts Um die obigen Faustformeln auf auf andere Teilchen übertragen zu können, benötigt man lediglich die Abhängigkeit von der Masse: v th,a ∼ m −1/2 a , ωca ∼ m −1 a , r th,a ∼ m 1/2 Die Gesamtlösung für alle Komponenten von va, und ra heißt dann v a (t) =v 0z e z + v 0⊥ cos ωca t + ε a v 0⊥ e z sin ωca t r a (t) = r 0 + ε a v 0⊥ v 0⊥ × e z v 0⊥ × e z ωca +v 0z te z + ωca sin ωca t − ε a ωca cos ωca t 20 Die gesamte Bewegung ist also die Überlagerung einer Kreisbewegung um das sogenannte Gyrationszentrum, va,g(t), ra,g(t) und einer gleichförmigen, geradlinigen Bewegung des momentanen Gyrationszentrums (guiding center), Va, Ra(t). v a (t) = V a + v a,g (t) mit Va = v0zez r a (t) = R a (t)+v a,g (t) mit R a (t) = r 0 + ε a v 0⊥ × e z ωca + V a (t) In vielen Situationen von Plasmen in komplizierterer Umgebung ist es einfacher, statt der detaillierten Bahn eines Teilchens nur die Bewegung des Führungszentrums zu betrachten. Im allgemeinen bewegt sich dieses dann natürlich nicht mehr gleichförmig, geradlinig. Seine Bewegung kann aber häufig noch als Bewegung in einem effektiven Potential beschrieben werden. Man spricht dann von guiding center Näherung (s. Abschnitt B.4). b) E × B - Drift Es sei zusätzlich zu dem homogenen und konstanten Magnetfeld ein homogenes, konstantes elektrisches Feld vorhanden mit E ⊥ B. Die Bewegungsgleichung lautet dann: • m a v a⊥ (t) = q a (E + v a (t) × B) Dies ist eine inhomogene Differentialgleichung, deren homogener Anteil identisch mit der im vorigen Abschnitt behandelten Differentialgleichung ist. Als Ansatz für die partikuläre Lösung der inhomogenen Gleichung versucht man, wie üblich, eine Funktion, die sich wie die Inhomogenität verhält, d.h. hier v a⊥,p = u = const. mit u ⊥ B. Einsetzen in Glchg. (B.9) ergibt 0 = q a (E + u × B) Vektorielle Multiplikation mit B erlaubt u zu isolieren: 0 = E × B + (u × B) × B = E × B − B2u 21 u E = E ×2B B (B.10) Die Gesamtlösung ist also Gl. (B.10) und die im Abschnitt a) gewonnene Lösung der homogenen Gleichung. v a⊥ (t) = u E + a cos ωca t + b sin ωca t Die Anfangsbedingungen können wie in Abschnitt a) eingearbeitet werden, z.B. v 0⊥ = u + a Die ganze Bewegung kann also wieder als Überlagerung einer Gyration va,g(t) und einer Bewegung des Gyrationszentrums aufgefaßt werden. Die Geschwindigkeit des Gyrationszentrums ist auch hier konstant aber senkrecht zu E und B. v a⊥ (t) = u E + v a,g (t) v 0⊥ − u E und die Geschwindigkeit des Führungszenωca trums durch Gl. (B.10) gegeben sind. uE nennt man die E × B Driftgeschwindigkeit. Sie ist die mittlere Geschwindigkeit der Teilchen. Nach der elektromagnetischen Theorie ist u genau die wobei der Gyrationsradius jetzt durch Geschwindigkeit, mit der ein anderes Koordinatensystem sich gegenüber dem ursprünglichen bewegen muß, damit E zu Null transformiert wird. Man beachte, daß die Driftgeschwindigkeit unabhängig vom Ladungsvorzeichen der Teilchen ist, so daß hier in einem Plasma Elektronen und Ionen in die gleiche Richtung driften. Um die resultierende Form der Bahn zu veranschaulichen, betrachten wir Abb. B.2, wo die Abb. B.2: Zykloidenbahnen von negativen und positiven Teilchen in gekreuzten E- und B-Feldern. Verhältnisse für ein positives Teilchen dargestellt sind. Wir nehmen an, das E-Feld bewirke 22 eine kleine Störung der Bahn, so daß wir in nullter Näherung von der Kreisbahn ausgehen können. Solange v eine Komponente in Richtung E hat, nimmt v zu. Das ist in Abb. B.2/a in der linken Hälfte der Kreisbahn der Fall. In der anderen Hälfte nimmt v wieder ab. Es erreicht den maximalen Wert im oberen Umkehrpunkt, den minimalen im unteren Umkehrpunkt. D.h. v und damit der Gyrationsradius ist in Abb. B.2/a in der oberen Hälfte des Kreises im Mittel größer als in der unteren. Setzt man einen oberen Halbkreis mit größerem Radius und einen unteren mit kleinerem Radius zusammen, ergibt sich die seitliche Drift. Bei einem negativ geladenem Teilchen ist sowohl die Kraftrichtung wie die Umlaufrichtung umgekehrt. Die Richtung der Drift ist daher gleich. Wie GL. (B.10) zeigt, ist die Driftgeschwindigkeit von der Teilchenart unabhängig. Die Geometrie der Teilchenbahn hängt von v0⊥ ab. Z.B. erhält man für den Fall v0⊥ = uE eine gerade Bahn. Man kann die obige Betrachtung auf andere Kräfte ausdehnen, indem man die elektrostatische Kraft durch diese Kraft, z.B. die Schwerkraft ersetzt. qa E = Fa Als Driftgeschwindigkeit erhält man u F = q1 F ×2B a B Sie hat also für die Schwerkraft bei beiden Ladungsvorzeichen entgegengesetzte Richtung. 2. Erhaltungssätze a) Energieerhaltung Die folgenden Betrachtungen gelten für zeitlich konstante Felder, die räumlich inhomogen sein dürfen. E = E(r), B = B(r) Dann kann E als Gradient in einem elektrischen Potential dargestellt werden. E(r) = ∇Φ(r) 23 Durch skalare Multiplikation der Bewegungsgleichung Gl. (B.1) mit va(t) erhält man dr (t) m a v a • d v a (t) = −q a ∇Φ(r a (t)) • a dt dt d 1 m v 2 = −q d Φ(r (t)) a a a a dt 2 dt und nach Integration mit den Abkürzungen v a (t) =v a (t), v 0 =v 0 1 m v 2 (t) + q Φ (r (t)) = 1 m v 2 + q Φ(r ) a a a a a 0 a 0 2 2 D.h. die Entwicklung der kinetischen Energie ist durch das E-Feld gegeben. das B-Feld trägt nicht zur kinetischen Energie bei, da die Lorentzkraft senkrecht auf v steht und somit keine Arbeit leistet. Insbesondere bleibt für E = 0 die kinetische Energie konstant. Aus dieser Bedingung folgt sofort, daß ein geladenes Teilchen in einem homogenen, konstanten Magnetfeld eine Kreisbewegung vollführt, wenn vz0 = 0. v ⊥a ist konstant und die Kraft die hier nur die Lorentzkraft ist, steht immer senkrecht auf v⊥a(t). Dies sind genau die Verhältnisse bei einer Kreisbewegung. Die Gyrationsfrequenz und die Umlaufrichtung folgen dann sofort aus Gleichsetzen von Zentrifugal- und Lorentzkraft. b) Inhomogene Felder mit Symmetrien, Impulserhaltungssätze α) Lagrange - Funktion Die Bewegungsgleichungen (B.1) lassen sich als Lagrange-Gleichungen schreiben, wobei die Lagrange-Funktion gegeben ist durch L(r, v, t) = m v 2 + qv • A(r, t) − qΦ(r, t) 2 A ist das Vektorpotential, aus dem sich B ergibt über B(r, t) = ∇ × A(r, t) Φ das elektrische Potential mit (B.11) 24 E(r, t) = −∇Φ(r, t) − ∂ A(r, t) ∂t Die Lagrangeschen Gleichungen erleichtern die Betrachtung in unterschiedlichen Koordinaten wie kartesischen, Zylinder-, Kugel-, oder Toruskoordinaten. Für eine beliebige Koordinate u lautet dann die Bewegungsgleichung d ∂L = ∂L dt ∂ u• ∂u Falls insbesondere L nicht von u abhängt, folgt d ∂L = 0, dt ∂ u• p u = ∂L• = const ∂u (B.12) Abb. B.3: Geometrie des Magnetfeldes im Beispiel pu ist der zur Koordinate u kanonisch konjugierte Impuls. (B.12) besagt also, daß wenn die Lagrange - Funktion von einer Koordinate nicht abhängt, der dazuzgehörige kanonische Impuls erhalten bleibt. β) Translationssymmetrie Es möge ein Magnetfeld vorliegen, das in Ebenen senkrecht zur x-Achse verläuft und in einer solchen Ebene und in der Zeit konstant ist, aber von x abhängen darf. E wird zur Vereinfachung gleich 0 gesetzt (Abb. B.3). B(x) wird beschrieben durch ein Vektorpotential 0 A(x) = A y (x) A z (x) 0 mit B = −A /z (x) / A y (x) Die Lagrangefunktion hat die Form 25 L(vx, vy, vz, x) = (m/2)(vx2 + vy2 +vz2) + q(vyAy(x) + vzAz(x)) Da ∂L = ∂L = 0 ∂y ∂z hat man entlang der Teilchenbahn als Konstante p y = ∂L = mv y + qA y (x) ∂v y p z = ∂L = mv z + qA z (x) ∂v z γ) Rotationssymmetrie Viele Plasmen zeigen Rotationssymmetrie wegen der Rotationssymmetrie der Ströme, die das einschließende Magnetfeld erzeugen. Zur Beschreibung wählt man Zylinderkoordinaten, wobei die z-Achse die Symmetrieachse bildet. Das Vektorpotential hat alle drei Komponenten, hängt aber nicht von ϕ ab A(r) = A r (r, z)e r + A ϕ (r, z)e ϕ + A z (r, z)e z und • • • v =r e r + r ϕ e ϕ +z e z Daraus ergibt sich die Lagrangefunktion • • • •2 • • • 2 •2 • L r, ϕ, z, r, z = m r + r 2 ϕ +z + q r A r (r, z) + r ϕ A ϕ (r, z)+z A z (r, z) 2 Da ∂L = 0 , ist ∂ϕ • p ϕ = ∂L• = mr 2 ϕ +qrA ϕ (r, z) = const ∂ϕ entlang der Teilchenbahn. δ) Magnetische Flußfunktion In einem zylindersymmetrischen Plasma mit B(r) = B r e r + B ϕ e ϕ + B z e z ∂B =0 ∂ϕ r,ϕ,z (B.13) 26 Abb. B.4: Zur Definition der Flußfunktion kann die Einführung der magnetischen Flußfunktion Ψ(r,z) sinnvoll sein. Diese ist definiert als der Fluß des Magnetfeldes durch eine Kreisscheibe vom Radius r, deren Mittelpunkt bei z auf der z-Achse liegt, und die senkrecht auf der z-Achse steht (Abb.B.4). Ψ(r, z) = ∫ z / =z,;r / ≤r B(r / ) • dA / = ∫ rotA(r / ) • dA / Nach dem Satz von Stokes kann man schreiben Ψ(r, z) = ∫ r / =r A(r / ) • dr / und mit dr = rdϕe ϕ Ψ(r, z) = ∫ 2π 0 rA ϕ (r, z)dϕ / Ψ(r, z) = 2πrA ϕ (r, z) Abb. B.5: Zur Definition des magnetischen Momentes eines kreisenden Elektrons Die Konstanz des azimutalen Impulses nach Gl. (B.13) hat dann die Form 27 • p ϕ = mr 2 ϕ + q Ψ(r, z) = const. 2π (B.14) Wir werden dieses Ergebnis zur Erklärung der sogenannten Bananenbahnen im axialsymmetrischen Torus (Abschnitt B.4.b) benötigen. 3. Magnetisches Moment Das magnetische Moment eines Kreisstromes I, der eine Fläche A umfaßt, ist µa = IaAa Für das gyrierende Teilchen setzen wir als Kreisstrom ein Ia = − qa 2π/ωca Das Minuszeichen rührt daher, daß ein gyrierendes Teilchen einen Umlaufsinn zeigt, der in jedem Fall bewirkt, daß das äußere Magnetfeld durch den Strom der Gyrationsbewegung abgeschwächt wird (s. Abschnitt B.1.b). Das magnetische Moment ist daher immer entgegengesetzt zu B ausgerichtet und das Plasma ist diamagnetisch. Mit der Fläche A = πrca2ez der Gyrationsbahn ergibt sich qa B (ωca = m ) a µ = − 1 q a ωca r 2ca e z 2 v2 = − 1 q a ωca a⊥ ez 2 ω2ca µ = −1 2 und mit Gl. (B.2) m a v 2a⊥ ez B µa = 1 m v2 2 a a⊥ B (B.15) 28 Abb. B.6: strenggenommen ist die Bahn im inhomogenen Feld nicht geschlossen. mit µa = -µaez b) Die adiabatische Invarianz von µa Bei einer Erhöhung von B in der Zeit wird sich durch Induktion auch v⊥2 erhöhen. Es zeigt sich, wie im folgenden nachgewiesen wird, daß sich, wenn nur die Änderung des Magnetfeldes langsam genug erfolgt, v⊥2 und B im gleichen Maße wachsen, so daß µa konstant bleibt. µa bleibt allerdings nicht streng erhalten, sondern nur unter der Vorraussetzung, daß B sich so langsam ändert, daß die Teilchenbahn nur wenig von der Bahn im konstanten Magnetfeld abweicht (Abb. B.6) 2π ∂B ωc ∂t << B Man sagt, µa ist eine adiabatische Invariante. Zum Nachweis der adiabatischen Invarianz integriert man die Änderung von m v 2⊥ über eine Gyrationsperiode. 2 τc ∆ m v 2⊥ = ∫ d m v 2⊥ dt 0 dt 2 2 τc = ∫ mv ⊥ • 0 (τc = 2π/ωc) dv ⊥ dt dt τc = ∫ v ⊥ q(E(r) + v ⊥ × B)dt 0 τc = ∫ E(r) • v ⊥ dt ≈ q a ∫ E • dr 0 (Die Integration erfolgt über die Teilchenbahn, wobei B als konstant angenommen wird.) Dieses Ergebnis läßt sich sofort interpretieren. Es besagt, daß die Änderung der kinetischen Energie der Gyration gleich der Arbeit des elektrischen Feldes am Teilchen ist. E wird durch die Änderung von B induziert: q a ∫ E • dr = q a ∫ rotE • dA = −q a ∫ ∂B • dA ∂t 29 Wegen des Umlaufsinns bei der Gyration gilt dA a = −ε a dAe z daher wird ∆Bv 2 −q ∫ ∂B • dA = q ∂B πr 2c ≈ q ∆B πr 2c = 1 q ω ⊥ = 1 mv 2⊥ ∆B c ∂t ∂t 2πω c 2 2 B Abb. B.7: Der Fluß innerhalb einer Teilchenbahn bleibt gleich, wenn sich das umgebende Magnetfeld ändert Insgesamt erhält man also ∆ m2 v 2⊥ m 2 v 2 ⊥ ≈ ∆B B d.h. die relativen Änderungen von m v ⊥2 und B sind gleich, oder 2 µa = m 2 v 2 ⊥ B ändert sich über die Teilchenbahn in dieser Näherung nicht. Eine genauere Rechnung zeigt, daß Abb. B.8: Ein Teilchen gyriert in ein höheres Magnetfeld hinein ∆µ a ∆B 2 µa ∼ B 30 Die Erhaltung des magnetischen Momentes ist gleichbedeutend mit der Erhaltung des magnetischen Flusses durch die Gyrationsbahn. Φa = Bπr 2ca 1 2 v 2⊥a m 2a 2πm a 2 m a v ⊥ v 2⊥a = Bπ 2 = Bπ 2 2 = = const. B ωca q B q2 Bei Änderung des Magnetfeldes bleibt also die Anzahl der Feldlinien, die die Gyrationsbahn durchsetzen, gleich. c) Der magnetische Spiegel α) Der Spiegeleffekt Ein Teilchen, das sich in einem homogenen B Feld in ein Gebiet höherer Feldstärke hineinbewegt, erfährt auf seiner Bahn eine zeitliche Änderung des Magnetfeldes. Wenn die Bewegung genügend langsam erfolgt, so daß die im vorigen Abschnitt gemachten Voraussetzungen erfüllt sind, bleibt das magnetische Moment µ des Teilchens auf seiner Bahn erhalten. An dem Energiesatz unter der Verwendung der Definition von µ m v 2 + m v 2 = m v 2 + µB = const. 2 // 2 ⊥ 2 // erkennt man, daß v// mit wachsendem B abnehmen muß. Die Abnahme wird durch die axiale Komponente der v × B Kraft erzeugt. F z = q a v a⊥ B r ∂ = 0 , in dem sich das Teilchen in er ∂ϕ ster Näherung auf einer Kreisbahn mit dem momentanen Gyrationsradius rc bewegt Nehmen wir ein zylindersymmetrisches Plasma an (Abb. B.8), so kann man mit Hilfe von divB = 0 Br durch Bz ausdrücken. divB = 0 in Zylinderkoordinaten gibt: 1 ∂ (rB ) + ∂ B = 0 r ∂r r ∂z z 31 c ∫0 B r (r c ) = − r1 rc rdr ∂B z ∂B = − 1 rc z ∂z 2 ∂z 1 2 ∂B z − q a 2 mv a⊥ ∂B z 1 F z = −q a v a⊥ r c = ωca ∂z 2 ∂z F z = −µ a ∂B z ∂z (B.16) Die Kraftrichtung ist von der Teilchenart unabhängig, da qava⊥ unabhängig vom Ladungsvor- Abb. B.9: Magnetische Flasche zeichen ist. Das Teilchen erfährt also eine Beschleunigung, die entgegengesetzt zum Gradienten des Magnetfeldes gerichtet ist, d.h. für genügend großes Magnetfeld wird v// = 0 und kehrt dann sein Vorzeichen um. Das Teilchen wird also reflektiert. Man nennt daher eine Magnetfeldkonfiguration wie in Abb. B.8 einen magnetischen Spiegel. β) Der Verlustkegel Die Gyration der Teilchen um das Magnetfeld ist die Grundlage von Plasmaeinschluß in magnetischen Feldern senkrecht zur Feldrichtung. In einem homogenen Feld können sich die Teilchen parallel zu B frei bewegen, werden also nicht eingeschlossen. Der Spiegeleffekt ermöglicht eine einfache Anordnung (Abb. B.9), die auch einen gewissen axialen Einschluß erlaubt. Man nennt eine Apparatur mit dieser Magnetfeldgeometrie eine Spiegelmaschine oder eine magnetische Flasche. Der axiale Einschluß ist allerdings nicht ideal, z.B. haben Teilchen, die keine senkrechte Geschwindigkeitskomponente besitzen, kein magnetisches Moment und verlassen daher das Magnetfeld ungehindert. Die genaue Grenze zwischen eingeschlossenen und nicht eingeschlossenen Teilchen wird durch folgende Überlegung ermittelt: 32 ∂B = 0 ist, ∂z startet. Die Geschwindigkeit an dieser Stelle, v0, bilde einen Winkel ϑ mit B0. Das Teilchen Wir betrachten ein Teilchen, das im Mittelbereich der magnetischen Flasche, wo werde reflektiert bei B = B1, d.h. hier ist v1// = 0. Aus dem Energiesatz folgt m v2 = m v2 2 0 2 1⊥ v 20 v 20⊥ = m 2 v 2 1⊥ m 2 v 2 0⊥ Die linke Seite ist nach Definition 1/sin2ϑ, die rechte Seite kann mit Gl. (B.15) auf das ma- Abb. B.10: Teilchen mit Geschwindigkeiten innerhalb des Verlustkegels werden im Spiegel nicht zurückgehalten gnetische Moment µ zurückgeführt werden, das für die gesamte Bahn konstant ist. 1 = µB 1 = B 1 sin 2 ϑ µB 0 B 0 sin 2 ϑ = B0 B1 D.h. je kleiner ϑ ist, umso größer wird das Magnetfeld, an dem das Teilchen umkehrt, um so tiefer dringt es also in den "Flaschenhals" ein. Es gibt einen Grenzwinkel ϑ*, der durch das maximale Feld der Flasche bestimmt ist. Abb. B.11: Die Van-Allen Gürtel sind magnetische Flaschen im Erdmagnetfeld sin 2 ϑ ∗ = B0 B max 33 Alle Teilchen, für die im Innern der Flasche ϑ < ϑ∗, entweichen aus der Flasche. Der Kegel mit der Öffnung ϑ∗ heißt der Verlustkegel, B0/Bmax das Spiegelverhältnis (Abb. B.10). Abb. B.12: Der von Fermi vorgeschlagene Mechanismus zur Beschleunigung kosmischer Teilchen über den Spiegeleffekt Der Geschwindigkeitsraum wird innerhalb des Verlustkegels entvölkert. Die Geschwindigkeitsverteilungsfunktion wird anisotrop. Im Rahmen der stoßfreien Theorie ergibt sich für alle anderen Teilchen ein idealer Einschluß. Bei Berücksichtigung von Stößen erhält man sowohl eine Diffusion quer zum Magnetfeld wie ein ständiges Auffüllen des Verlustkegels. Im Rahmen der kinetischen Theorie, die die zeitliche Entwicklung der Verteilungsfunktion beschreibt, ergibt sich ein instabiles Verhalten. In Spiegelmaschinen zur Fusionsforschung haben sich die axialen Verluste als unüberwindliches Hindernis erwiesen. Einen Vorteil bietet z.B. die gegenüber einem Torus einfachere Geometrie. Die van-Allen Gürtel sind axialsymmetrische Flaschen im dipolartigen Magnetfeld der Erde (Abb. B.11). Sie enthalten relativ hohe Teilchendichten. Fermi schlug einen Mechanismus vor, mit dem kosmische Teilchen auf die beobachteten hohen Energien beschleunigt werden können: An zwei magnetischen Spiegeln, die aufeinander zulaufen, werden eingeschlossenen Teilchen reflektiert. Bei jeder Reflexion gewinnen sie Energie. Ob der Fermimechanismus wirklich verantwortlich für die Beschleunigung der beobachteten kosmischen Teilchen hoher Energie ist, ist nicht bekannt. 4. Bewegung im inhomogenen Magnetfeld, Driftnäherung Zur Lösung der Bewegungsgleichung im inhomogenen Magnetfeld d v = q a v × B(r (t)) a a ma a dt 34 ist man auf Näherungen angewiesen. Eine weit verbreitete Näherung ist die Driftnäherung. Hier geht man davon aus, daß die Bewegung des Teilchens als Summe einer Gyrationsbewegung ra,g(t) mit r a,g (t) = r ca und einer Bewegung des Gyrationszentrums Ra(t) darstellen läßt: r a (t) = R a (t) + r a,g (t) v a (t) = V a (t) + v a,g (t) (B.17) Man berechnet Ra(t) und Va(t). Dies ist sinnvoll, solange die typischen räumlichen und zeitlichen Größen der Gyrationsbewegung rca und Tca = 2π/ωca klein sind im Verhältnis zu typischen Größen des Plasmas L und Ta. L kann z.B. die charakteristische Länge für die Ortsabhängigkeit von B(r) sein, Taeine charakteristische Zeit für die Änderung von Ra. z.B. Ta = L . Va rca << L Tca << Ta a) Mittelung der Bewegungsgleichung Mit dem Ansatz Gl. (B.17) wird die Bewegungsgleichung • q • V +v g = m (V + v g ) × B(R + r g ) . Das Magnetfeld wird linearisiert B(R + r g ) = B(R) + (r g • ∇)B(R) ( r g << L) • q • V +v g = m (V × v g ) × (B(R + (r g • ∇)B(R))) q = m [V × B(R) + v g × B(R) + V × (r g • ∇)B(R) + v g × (r g • ∇)B(R)] (B.18) Nach Gl. (B.5) wird die Gyrationsbahn beschrieben durch v v ×e r g (t) = ω0⊥ sin ωc t − ε 0⊥ω z cos ωc t c c Durch Festlegung der x-Achse in Richtung v0⊥ , v0⊥ex vereinfacht sich die Schreibweise v r g (t) = ω⊥ (e x sin ωc t + εe y cos ωc t) c 35 Wegen Tc <<T darf ωc (ebenso V und R) während einer Gyration als konstant angesehen werden. damit wird • • v g (t) =r g (t) =v ⊥ (e x cos ωc t − εe y sin ωc t) • v g (t) = −ω2c r g (t) Im zeitlichen Mittel über eine Gyrationsperiode wird • ⟨r g (t)⟩ = ⟨v g (t)⟩ = v g (t) = 0 D.h. durch Mittelung heben sich aus Gl. (B.18) alle Terme, die linear in rg und vg sind fort: • q V (t) = m [V × B(R) + ⟨v g × (r g • ∇)B(R)⟩] Bei der Mittelung des letzten Termes auf der rechten Seite heben sich alle gemischten sin cos - Terme fort, während sin 2 ωt = ⟨cos 2 ωt⟩ = 1 2 v 2⊥ ∂ ∂ ωc (e x cos ωc t − εe y sin ωc t) × sin ωc t ∂x + ε cos ωc t ∂y B(R) v2 = 1 ε ω⊥c e x ∂ − e y ∂ × B(R) ∂y ∂x 2 2 v = − 1 ε ω⊥ e z × e x ∂ + e y ∂ × B(R) c ∂x ∂y 2 mv 2 = − 1 ⊥ (e z × ∇) × B(R) 2 qB µ = −ε [∇(e z • B(R)) − e z ∇ • B(R)] q Der zweite Term verschwindet, damit bleibt für den ersten Term µ − q ∇B(R) Die Bewegungsgleichung des Führungszentrums lautet damit insgesamt • V (t) = m1 [q a V a × B(R a ) − µ a ∇B(R a )] a (B.19) 36 Das Führungszentrum bewegt sich wie unter dem Einfluß einer effektiven Kraft, wobei der erste Term analog zur Lorentzkraft gebildet wird, der zweite ist der µ∇B - Term, der uns beim Spiegeleffekt begegnet ist (B.16). b) Energieerhaltungssatz Der Energieerhaltungssatz für das Teilchen lautet streng 2 E a = const = 1 m a v a (t) 2 = 1 m a (V a + v ag ) = 1 m a V 2a + 2V a • v ag + v 2ag 2 2 2 Im zeitlichen Mittel ergibt sich daraus Ea = ma 2 ma 2 ma 2 V + v = V + µ a B(R a ) 2 a 2 ⊥ 2 a Das Gyrationszentrum bewegt sich also wie ein freies Teilchen im Potential µaB(Ra). µaB(Ra) nennt man daher das effektive Potential des entsprechenden Teilchens. Die dazugehörige Kraft ist µ a ∇B(R a ) (s. Gl. (B.19)). Im Folgenden Abschnitt zeigt sich, daß Va⊥ in erster Ordnung von rcak/L klein ist. d.h. in dieser Näherung ist V 2a ≈ V 2a// und aus dem Energiesatz läßt sich Va// ermitteln. V a// (R a ) = ± m2 (E a − µ a B(R a )) a c) Driftgeschwindigkeiten Die Geschwindigkeit des Führungszentrums senkrecht zum Magnetfeld nennt man Driftgeschwindigkeit. Man teilt also Va auf in einen Anteil parallel und einen senkrecht zu B. V a (t) = V a// e(R a (t) + V a⊥ ) B(r) der lokale Einheitsvektor in Richtung der Feldlinie ist. Einsetzen in Gl. B(r) (B.19) führt zu wobei e(r) = • • • V a// e + V a// e +V a⊥ = m1 [q a V a⊥ × B(R a ) − µ a ∇B(R a )] a 37 • • qa 1V ≈ V V × B = ω V >> darf V a⊥ ca a⊥ a⊥ a a⊥ vernachlässigt werden. Der Term ma Ta mit Va⊥⊥ wird auf die linke Seite geschafft: Wegen • • q a V a⊥ × B(R a ) = µ a ∇B(R a ) + m a V a// e + V a// e Die Gleichung wird mit B(Ra) vektoriell malgenommen. Die linke Seite ergibt dann q a B × (V a⊥ × B) = q a B 2 V a⊥ • Auf der rechten Seite wird unter Verwendung der Kettenregel e umgeschrieben: • • e;= d e(R a (t)) = R a (t) • ∇ e(R a ) = (V a • ∇)e dt Also q a B 2 V a⊥ = B × (µ a ∇B + m a V a// (V a • ∇)e) Abschätztung von Va⊥ über den ersten Term rechts zeigt, wie oben erwähnt, daß Va⊥ ~ rca/L. Daher ist (V a⊥ • ∇)e von zweiter Ordnung klein und wird vernachlässigt. V a⊥ (R a ) = 1 B × µ ∇B + m V 2 (e • ∇)e a a// a qa B2 (B.20) Abb. B.13: Geometrie bei der Zentrifugaldrift Die Inhomogenität von B führt also zu einer Bewegung des Führungszentrums senkrecht zur Magnetfeldrichtung. Die Drift setzt sich aus zwei Anteilen zusammen, die im folgenden als Gradient-B Drift und Zentrifugaldrift identifiziert werden. α) Gradient-B Drift Der erste Term in GL. (B.20) führt zur Gradient-B Drift 38 V a,∇B = B × ∇(µ a B) qa B2 Diese Formel kann man aus der früher abgeleiteten Formel für die Drift in einem homogenen F ×B Magnetfeld unter dem Einfluß einer äußeren Kraft (Gl. B.10) u a = a 2 gewinnen, indem qaB man dort Fa durch −∇(µ a B) ersetzt. β) Zentrifugaldrift Der zweite Term wird als Zentrifugaldrift identifiziert, d.h. die Drift, die unter dem Einfluß der Zentrifugalkraft entsteht, die ein Teilchen bei der Bewegung entlang einer gekrümmten Feldlinie erfährt. V a,z = m a V 2a// B × (e • ∇)e qa B2 Betrachtet man e als Funktion der Bogenlänge s entlang der Feldlinie, so ist nach Definition des totalen Differentials d.h. de = (e • ∇)eds (e • ∇)e = de ds Setzt man die geometrischen Verhältnisse von Abb. B.13 ein, erhält man de = 1 de = 1 − R x = − R x ds R x dϕ R x R x R 2x (Rx ist der Vektor, der den Krümmungsradius der Feldlinie repräsentiert). −m a V 2a// (e • ∇)e = m a V 2a// Rx = F a,z R 2x ist also die Zentrifugalkraft. Die Formel für die Zentrifugaldrift kann also aus Gl. (B.10) gewonnen werden, indem man für die äußere Kraft die Zentrifugalkraft einsetzt. 39 V a,z = F a,z × B qa B2 Anstatt die Zentrifugalkraft über den Enheitsvektor e in Richtung B auszudrücken, kann man sie auch direkt über B ausdrücken: Abb. B.14: Magnetfeldlinien auf einer Kugelfläche haben mindestens einen Punkt, an dem das Magnetfeld verschwindet. (e • ∇)e = 1 (e • ∇)B + B(e • ∇) 1 B B also B × ((e • ∇)e) = 1 × ((e • ∇)B) = 12 B × ((B • ∇)B) B B Damit wird die Zentrifugaldrift m a V 2a// V a,z = B × ((B • ∇)B) qa B4 5. Teilcheneinschluß a) Einleitung Eine der zentralen Aufgaben der Hochtemperatur-Plasmaphysik ist der möglichst lange Ein- Abb. B.15: Die Geometrie am Plasmatorus schluß eines genügend dichten Plasmas. Der einfachste Einschluß ist der Trägheitseinschluß: Auf grund ihrer trägen Masse bleiben Teilchen eine gewisse Zeit zusammen. Aufheizung muß so schnell erfolgen, daß das Plasma während der Aufheizzeit praktisch nicht 40 auseinanderfliegt. Man heizt das Plasma mit Laserlicht oder eventuell mit Teilchenstrahlen auf. Plasmen mit Trägheitseinschluß sind im allgemeinen sehr dicht und kurzlebig. Einschluß mit Hilfe von statischen elektrischen Feldern ist grundsätzlich instabil (Satz von Earnshaw). In zeitlich periodischen Feldern wird der Einschluß einzelner Teilchen in der Teilchenphysik erfolgreich praktiziert (s. Paul, Bonn), während Plasmaeinschluß in solchen Feldern praktisch nicht untersucht wird. Der erfolgreichste Einschluß für Plasmen ist heute der magnetische Einschluß. Die einfachste Geometrie wäre die Kugelgeometrie. Da Magnetfeldlinien geschlossen sein müssen, sieht man sofort ein, daß die Kugeloberfläche, auf der Magnetfeldlinien laufen, zwei Punkte hätten, an denen B gleich Null wäre, an denen also das Plasma entweichen könnte. Die einfachste magnetische Einschlußgeometrie ist also der axialsymmetrische Torus. b) Der axialsymmetrische Plasmatorus, Geometrie und Koordinaten Die Torusgeometrie ist in Abb. B.15 skizziert. Ein Torus ist ein Ring mit großem Radius R Abb. B.16: Im rein toroidalen Feld driften die Teilchen unabhängig vom Ladungsvorzeichen nach aussen und kleinem Radius a. R/a heißt das Aspektverhältnis, das also die Schlankheit eines Torus angibt. Die toroidale Koordinate, d.h. die Koordinate, die auf dem großen Umfang läuft, heißt ϕ, die poloidale entlang dem kleinen Umfang ω. Die Symmetrieachse wird als z-Achse von Zylinderkoordinaten gewählt. Der Ring liegt in der Ebene z = 0, die wir zuweilen auch die Äquatorebene nennen. Wir schreiben der Eindeutigkeit wegen für ϕ und ω oft auch die Indizes tor und pol. Im axialsymmetrischen Feld sind alle Größen von der toroidalen Koordinate unabhängig, in Zylinderkoordinaten: ∂ B = ∂ B = ∂ B =0 ∂ϕ r ∂ϕ ϕ ∂ϕ z 41 c) Plasma im rein toroidalen Feld Abb. B.17: Magnetische Flächen im axialsymmetrischen Torus Ein rein toroidales Feld wird am einfachsten durch einen geraden Stromfaden entlang der zAchse erzeugt. Das Feld ist dann B= µ0 I 2πr also inhomogen. Das gleiche Verhalten hat man übrigens wegen des Ampereschen Gesetzes ∫ B • dr = µ0 I für alle axialsymmetrischen Spulenanorednungen, in denen der Strom außer- halb des für den Einschluß betrachteten torusförmigen Bereiches fließt. Auf Grund der Gradient-B Drift driften positive und negative Teilchen in entgegengesetzte Richtungen parallel (b.z.w. antiparallel) zur z-Achse. An dieser Stelle muß die strenge Einteilchenbetrachtung verlassen werden. Die Drift wird nämlich starke elektrische Felder aufbauen, die die Drift in z-Richtung beenden. In diesem Zustand hat man gekreuzte E- und B- Felder, in denen Elektronen und Ionen in gleicher Richtung driften. Das Plasma verläßt in r-Richtung die magnetische Falle. Abb. B.18: Durch die Verschraubung des Magnetfeldes können Raumladungen abgebaut werden d) Torus mit toroidalem und poloidalem Feld α) Die Felder Man kann den Plasmaverlust, der im rein toroidalen Feld auftritt, verhindern, indem man dem toroidalen Feld ein poloidales überlagert. Das Gesamtfeld ist dann B(r) = B tor (r) + B pol (r) 42 mit B tor (r) = B tor (r)e tor Bpol wird durch einen toroidalen Strom I im Plasma erzeugt. Die Feldlinien verlaufen schraubenförmig auf ineinandergeschachtelten torusförmigen magnetischen Flächen. Die Feldlinien des poloidalen Anteils des Gesamtfeldes sind in Abb. B.17 skizziert. Die Neigung der Feldlinien gegen die Torusrichtung ist normalerweise klein. Typischerweise umläuft die Feldlinie bei einem Umlauf um den kleinen Umfang den großen Umfang drei mal. Dies ist gleichbedeutend damit, daß Bpol << Btor B pol = 2πa = 1 a ≈ 1 B tor 3 ⋅ 2πR 3 R 10 B= 2 B tor 2 + B pol = B tor B pol 1+ B tor 2 ≈ B tor Anschaulich bewirkt die Verschraubung der Feldlinie für den Teilcheneinschluß, daß die durch die Gradient-B Drift entstandenen vertikalen E-Felder in toroidaler Richtung kurzgeschlossen werden, denn dadurch, daß sich die geladenen Teilchen frei entlang dem Magnetfeld bewegen können, ist ein Ladungsaustausch zwischen einem Gebiet, in dem sich an der "oberen" Seite des Torus (d.h. in z-Richtung) z.B. positive Ladung angesammelt hat, und einem in toroidaler Richtung versetztem Gebiet mit negativer Raumladung möglich, wenn durch beide Gebiete die gleichen Feldlinien laufen (Abb. B.18). β) Die Flußfunktion Nach Abschnitt B.2.b.δ war die Flußfunktion Ψ(r,z) als der magnetische Fluß definiert, der durch einen Kreis geht, der in einer Ebene senkrecht zur z-Achse verläuft, der einen Radius r besitzt und dessen Mittelpunkt auf der z-Achse liegt. Ψ(r, z) = ∫ B • dA 43 Auf den oben definierten magnetischen Flächen ist Ψ konstant. Um dies zu zeigen, benötigt man nur das poloidale Feld, da das toroidale Feld nicht zum Fluß beiträgt. Die Feldlinien des poloidalen Feldes sind in Abb. B.17 skizziert. Da die Kreise zur Berechnung des magneti- Abb. B.19: Die Bewegung des Gyrationszentrums in der Projektion auf die poloidale Ebene für den Fall, daß das Teilchen nicht in einem Spiegel reflektiert wird schen Flusses auf einer magnetischen Oberfläche alle auf der gleichen poloidalen Feldlinie liegen, enthalten sie die gleiche Anzahl poloidaler Feldlinien und durchsetzt sie der gleiche magnetische Fluß. Man nennt die magnetischen Flächen daher auch Flußflächen. Im Plasma wächst Ψ in der Äquatorebene (bei geeigneter Richtung des toroidalen Stromes) mit wachsendem r bis zur magnetischen Achse, d.h. bis zu der Flußfläche, die zu einem Kreis entartet ist, an. Betrachtet man also den gesamten poloidalen Querschnitt, so wächst Ψ von außen nach innen und hat an der magnetischen Achse ein Maximum. γ) Teilchenbahnen Im folgendem wird die Bahn, die das Gyrationszentrum eines in einem axialsymmetrischen Torus gyrierenden Teilchens mit positiver Ladung (q > 0) qualitativ ermittelt. v⊥ und v// sind Komponenten von v senkrecht und parallel zu B, wobei v// positiv oder negativ sein kann, jenachdem, ob v// parallel oder antiparallel zu B ausgerichtet ist. Wegen der Axialsymmetrie des Feldes ist der verallgemeinerte Impuls in toroidaler Richtung pϕ konstant (s. B.2.b.δ). • p ϕ = mr 2 ϕ + q Ψ(r, z) 2π Abb. B.20: Die Bahn eines eingefangenen Teilchens ähnelt in der Projektion auf die poloidale Ebene einer Banane • In guter Näherung darf r ϕ=v ϕ durch v// ersetzt werden. Die Diskussion stützt sich also auf die Formeln 44 i) B(r) = ii) µ = RB(R) r m 2 v 2 ⊥ B = const iii) v 2⊥ +v 2// = const iv) p ϕ = mrv // + q Ψ = const. 2π In Abb. B.19 ist die Projektion der Bahn in eine poloidale Ebene (ϕ = const) skizziert. Ein Teilchen mit q > 0 starte in der Äquatorebene an der Außenseite der Flußfläche. Das Führungszentrum folgt in erster Näherung der magnetischen Feldlinie und damit nimmt r ab. Nach Gl. i) wächst B, nach Gl. ii) wächst v⊥, nach Gl. iii) nimmt v// ab, nach Gl. iv) nimmt Ψ zu, d.h. das Teilchen verbleibt nicht auf der anfänglich besetzten magnetischen Fläche, sondern verschiebt sein Gyrationszentrum auf eine magnetische Fläche mit größerem Ψ, d.h. eine magnetische Fläche, die näher an der magnetischen Achse liegt. Es gibt jetzt zwei Möglichkeiten: 1. Fall : v0// ist so groß, daß das Teilchen die Äquatioralebene innerhalb der magnetischen Achse mit v// > 0 erreicht. dann folgt es weiterhin der momentanen Feldlinie und beschreibt eine zur Äquatorebene spiegelsymmetrische Bahn (Abb. B.19). 2.Fall: Das Teilchen wird vor Erreichen der Äquatorialebene gespiegelt. v// erhält also im Spiegelpunkt ein negatives Vorzeichen, r wächst, nach i) nimmt B ab, nach ii) nimmt v⊥2 ab und nach iii wächst v//2 . v// nimmt aber ab, da es immer negativer wird. Das hat zur Folge, daß nach iv) Ψ wächst. Das Teilchen nähert sich weiter der magnetischen Achse, es erreicht die Äquatorialebene außerhalb der magnetischen Achse. Von da an wiederholt sich die Bahn spiegelbildlich zur Äquatorialebene, so daß insgesamt die Form einer Banane entsteht. Man spricht von Bananenbahn (Abb. B.20). Das inhomogene Feld bildet also Spiegel, in denen Teilchen mit genügend kleiner Anfangsgeschwindigkeit parallel zu B eingefangen werden. Bei dem Hin- ind Herlaufen zwischen den 45 Spiegeln ist die Bahn nicht gleich, da der Erhaltungssatz des verallgemeinerten Impulses (Gl. iv) gilt, in dem v// vorzeichenbehaftet eingeht. Die Bananenbahn hat einen Einfluß auf die Diffusion der Teilchen im Torus. Diese entsteht durch Stöße von Teilchen untereinander. In einem homogenen Magnetfeld wird das Gyrationszentrum bei einem Stoß im Mittel um den Gyrationsradius versetzt. Bei Vorliegen einer Bananenbahn beträgt die Versetzung eine Strecke, die durch die Dicke der Bananenbahn gegeben ist. Die Diffusion erhöht sich dadurch. Man spricht in diesem Fall von neoklassischer Diffusion.