Versuch_2
Werbung

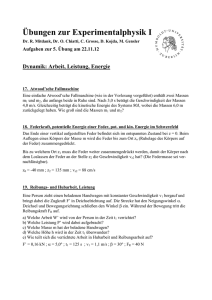
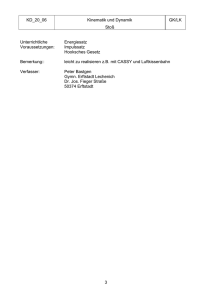
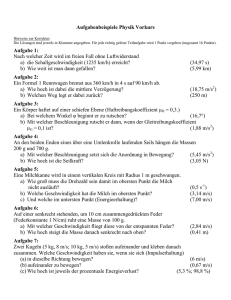
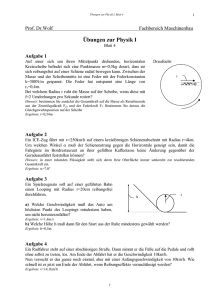
Versuch 2: Statische und dynamische Messung von Federkonstanten 1. Zielstellung Im täglichen Leben spielen rücktreibende bzw. federnde Kräfte häufig eine entscheidende Rolle, ohne dass dieser Zusammenhang für physikalisch Unbedarfte erkennbar ist. So basieren die meisten schwingfähigen Gebilde auf einem einfachen Feder-Masse-Modell, welches den periodischen Austausch von potentieller und kinetischer Energie gewährleistet. Im konkreten Versuch soll die statische und die dynamische Messung von Federkonstantanten vorgenommen werden. Zur Erklärung der verformenden Wirkung der Federkräfte soll das Hooksche Gesetz angewandt werden. Die Analogie der Federkonstante einer linearen Feder zur Winkelrichtgröße einer Drehfeder ist herzustellen. Weiterhin führt die Parallel- und Reihenschaltung von Schraubenfedern zu Vergleichen mit Erkenntnissen aus der Elektrotechnik. 2. Literatur Mende, D.; Kretschmar, W.; Wollmann, H. Schneider, H.A.; Zimmer, H. Stoppe, H. Hering, E.; Martin, R.; Stohrer, M. "Physikalisches Praktikum", Fachbuchverlag Leipzig, 1990, ISBN 3-343-00239-9, Seite 33 - 35 "Physik für Ingenieure" Bd. 1, Fachbuchverlag Leipzig, 1989, ISBN 3-343-00172-4, Seite 56 "Physik", Fachbuchverlag Leipzig, 2005, ISBN 3-446-40047-8, Seite 41/42, 290 - 294 "Physik für Ingenieure", Springer Verlag Berlin, 2004, ISBN 3-540-21036-9, Seite 351 3. Kolloquiumsschwerpunkte • • • • • • • Federtypen und ihre Anwendungen Hooksches Gesetz Definition und Messmethode von statischen Federkonstanten Lösungen einfacher Differentialgleichungen Fehlerrechnung Auswertungen von Ausgleichgeraden Trägheitsmoment Seite 1 von 6 4. Grundlagen Für die Verformung von fester Materie kann ein Diagramm erstellt werden, dass den Verformungsgrad mit der Kraft verbindet. Typischerweise wird der Verformungsgrad durch die relative Verlängerung ε eines Probestücks berücksichtigt. (4.1) ε= Δl l Die Kraft, die für diese Dehnung ε aufgebracht werden muss, wird über die mechanische Spannung σ beschrieben. (4.2) σ= F A Die mechanische Spannung beschreibt folglich eine wirkende Kraft F pro Flächeneinheit A ähnlich der Druckdefinition. Abb. 4.1: Mechanische Zugbeanspruchung eines Probekörpers Für kleine Auslenkungen reagieren die meisten Festkörper mit einem linearen Zusammenhang zwischen der aufgebrachten Kraft und der Dehnung. Außerdem relaxieren die elastischen Stoffgruppen nach dem Entfernen der Krafteinwirkung. Bei größeren Auslegungen werden die Materialien unter der Einwirkung der Kraft zum Fließen neigen, wodurch eine dauerhafte Verlängerung der Probestücke nach der Krafteinwirkung zurückbleibt. Diese anelastische Nachwirkung wird schließlich bei Erhöhung der Kraft irgendwann zum Zerreißen der Probe führen. Für die Anwendung der Materialien als Federmaterial ist nur der anfangs beschriebene elastische Bereich interessant, der als Hookscher Bereich definiert ist. Bei Stahl liegen die zulässigen Dehnungen ohne dauerhafte anelastische Verformung typischerweise im folgenden Bereich. (4.3) Hookscher Bereich bei Stahl Æ ε max −elastisch ≈ 10 −3 Die Steigung im Hookschen Bereich wird durch den stoffspezifischen Elastizitätsmodul E charakterisiert. (4.4) Hooksche Bereich Æ σ = E * ε Seite 2 von 6 Abb. 4.2: Schematisierter Verlauf der mechanischen Spannung als Funktion der Dehnung Bei dem Einsatz kommerzieller Metalle als Federn muss dafür gesorgt werden, dass die maximale Dehnung im elastischen Bereich nicht überschritten wird. Dies kann durch konstruktive Maßnahmen erreicht werden, was nur zu kleinen lokalen Dehnungen bei großen äußeren Verformungen der Federkörper führt. Bei so genannten Schraubenfedern wird ein langer Draht mehrfach aufgewickelt. Die lokale Dehnung im Material entsteht durch die geringe Verdrillung des Drahtes aufgrund der Zugbelastung der Feder. Durch die Länge des Drahtes führt diese Verdrillung schließlich zu einer makroskopischen Längenänderung der Feder. Die Wirkung der Feder kann im elastischen Bereich (Hookscher Bereich) durch einen linearen Zusammenhang zwischen der Kraft und der Verlängerung der Feder beschrieben werden. (4.5) F = k * Δl Ähnlich kann auch die Wirkung einer Rotationsfeder durch ihre Winkelrichtgröße k* formuliert werden. Dieser Sachverhalt ist nichts anderes als das Federgesetz nach Gleichung 4.5 bezogen auf den Drehwinkel Δα der Feder, wobei die Kraft durch das Drehmoment M ersetzt werden muss. (4.6) M = k * * Δα Nachstehend sind die beiden Federtypen schematisch dargestellt. Abb. 4.3: Messungen zur statischen Bestimmung der Federkonstante Seite 3 von 6 Das vektorielle Drehmoment ergibt sich aus dem Kreuzprodukt des Kraftvektors mit dem Ortsvektor des Kraftangriffpunkts im Bezug zum Drehpunkt (4.7) r r r M = r×F Der Betrag des Drehmoments kann somit direkt durch den Winkel β zwischen den beiden Vektoren angegeben werden. (4.8) M = r * F * sin β Ein Feder-Masse-System bildet ein schwingfähiges System, da es für die Energie zwei unabhängige Speichermöglichkeiten hat. Die Energie des Schwingsystems kann als potentielle Federenergie und als kinetische Energie der Masse gespeichert sein. Zur Berechnung der Eigenresonanz des ungedämpften Systems wird die Differentialgleichung nach dem Newton’schen Kraftansatz aufgestellt. (4.9) m * &y& = −cy Æ &y& + c y=0 m Aus der Gleichung 4.9 ergibt sich unmittelbar die Eigenfrequenz des Schwingsystems. (4.10) f 0 = 1 c * 2π m Auch für die Drehfeder kann in Verbindung mit einem Trägheitskörper ein Schwingsystem aufgebaut werden. Die Differentialgleichung ergibt sich aus der Gleichsetzung der Drehimpulsänderung und dem rücktreibenden Drehmoment durch die Drehfeder. (4.11) J * α&& = − k * * α Æ α&& + k* *α = 0 J Mit der Differentialgleichung 4.11 kann ebenfalls die Resonanzfrequenz unmittelbar berechnet werden. (4.12) f 0 = 1 2π k* J Im Versuch ist das Trägheitsmoment J0 durch den Drehteller gegeben. Eine Veränderung des Trägheitsmoments kann durch zusätzliche Massen mi auf dem Drehteller erfolgen, die im Ri von der Drehachse angebracht werden. Das Trägheitsmoment berechnet sich dann nach dem Steiner’schen Gesetz, indem die Massen mi als Punktmassen angenommen werden. (4.13) J = J 0 + ∑ mi * Ri2 i Die Prinzipien der dynamischen Messungen sind nochmals in der nachfolgenden Graphik gegenübergestellt. Seite 4 von 6 Abb. 4.4: Dynamische Messung der Federkonstanten 5. Aufgaben a) Von vier Schraubenfedern ist die Federkonstante k durch die grafische Darstellung der Kraft F als Funktion der Längenänderung der Feder zu bestimmen. Die Ausgleichsgerade soll mindestens aus 5 Messpunkten gebildet werden. Außerdem ist eine Fehlerbetrachtung durch die Berücksichtigung der Fehlerbalken vorzunehmen. b) Für mindestens eine der Federn ist die Federkonstante aus der Schwingungsdauer zu ermitteln und mit dem Ergebnis von a) zu vergleichen. Zur Messung der Schwingungsdauer sind jeweils 10 Schwingungen mit 3 verschiedenen Belastungsmassen zu beobachten. c) Für die beiden gleichen Federn ist wie unter dem Aufgabenteil a) die gemeinsame Federkonstante bei Serien- und bei Parallelschaltung zu bestimmen. Auch hier sind die Erwartungshaltungen aus dem Aufgabenteil a) zu verifizieren. d) Die Winkelrichtgröße k* des Kraftmomentmessers ist zu messen. Hierzu sind mittels geeigneter Federwaagen unter Nutzung dreier verschiedener Angriffsradien entsprechende Drehmomente anzusetzen. Die Ablesung erfolgt bei einer Auslenkung von Δα=90°. e) Bestimmen Sie mit zwei dynamischen Messungen die Winkelrichtgröße und vergleichen Sie diese mit dem Wert aus Aufgabe d). Nutzen Sie hierzu zusätzliche Massen zur gezielten Veränderung des Trägheitsmoments. f) Für zwei Federn mit extremen Federkonstanten ist der Torsionsmodul G des Werkstoffes zu berechnen. 8nkD 3 Formel zur Bestimmung des Torsionsmoduls: G = d4 Formelzeichen Bedeutung n Anzahl der Windungen k Federkonstante D Durchmesser einer Windung d Drahtdurchmesser Innerhalb der Versuchsausarbeitung sind die Begriffe harte und weiche Feder, harmonischer Oszillator, die Analogie von linearer und Drehschwingung sowie der Vergleich von Federschaltung und Schaltung elektrischer Widerstände und Kapazitäten zu bearbeiten. Eine Fehlerbetrachtung ist bei allen Aufgabenteilen durchzuführen. Seite 5 von 6 6. Physikalische Konstante und Materialkonstanten m s2 Erdbeschleunigung g = 9,81 Torsionsmodul von Stahl, typisch G = 40...80 *10 9 Seite 6 von 6 N m2