(1) (2) (3)
Werbung
 (2) (3)")
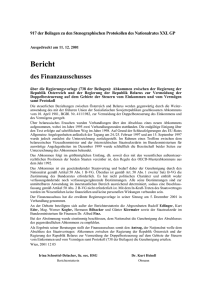
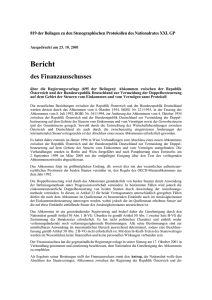
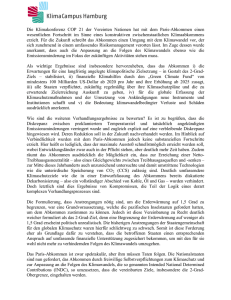
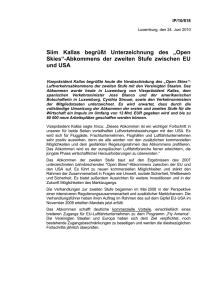
1 Reflektas – Ein neuartiges Lane Departure Prevention System auf der Basis reflektorischer Lenkreaktionen Prof. Dr. Frank Eggert (TU Braunschweig) Arten von Querführungsassistenten 2 LANE KEEPING ASSISTANCE SYSTEMS LANE DEPARTURE WARNING SYSTEMS LANE DEPARTURE PREVENTION SYSTEM in der Spur bleiben nicht aus der Spur kommen wieder in die Spur kommen zusätzliche Lenkmomente zur Reduktion kleinerer Lenkkorrekturen während des normalen Fahrens visuelle, akustische oder haptische Warnung bei drohendem Spurabkommen ? Komfortsystem Sicherheitssystem Problem: schnell und reliabel das richtige Verhalten auslösen Gefahrenabwehrsystem Wie sieht der klassische Ansatz in der Fahrerassistenzentwicklung aus? 3 Grundlegendes Paradigma Kommunikation zwischen System und Fahrzeug auf ein Signal hin korrigiert der Fahrer das Verhalten des Fahrzeugs Paradigmenbedingte Probleme in der Regel arbiträre Signale mit arbiträrer Semantik erlernte Reiz-Reaktions-Verbindungen fehlinterpretationsgefährdet interferenzgefährdet nicht löschungsresistent Ressourcenabhängig fehleranfällig bei verringerter kognitiver Leistungsfähigkeit Kognitive und Adaptive Verhaltenssteuerung 4 Kognitive Verhaltenssteuerung tendenziell komplexer, langsamer, fehleranfälliger Adaptive Verhaltenssteuerung tendenziell einfacher, schneller, robuster basiert auf Informationsverarbeitungsprozessen basiert auf adaptiven ReizReaktionsverbindungen steuert Handlungen steuert Verhalten Kommunikationsgesteuert Reizgesteuert Arbiträre Signale mit ebensolcher Semantik global oder lokal fixierte Reize ohne separierbare Semantik verbunden mit bewußter Repräsentation des Prozesses verbunden mit bewußter Repräsentation des Ergebnisses beinhaltet (bewußte) Entscheidungsprozesse läuft weitgehend autonom ab Adaptive Verhaltenssteuerungsmechanismen 5 Komplexität Einsicht Abgeleitete Kontingenzen Instruktion Mitgeteilte Kontingenzen Modelllernen Beobachtete Kontingenzen Operante Konditionierung Klassische Konditionierung Prägung Erfahrene Kontingenzen Instinkt Auslösergesteuertes Verhalten (komplex) Reflex Auslösergesteuertes Verhalten (einfach) Signallernen Auslöserlernen Stabilität Schnelligkeit Arten von Querführungsassistenten 6 LANE KEEPING ASSISTANCE SYSTEMS LANE DEPARTURE WARNING SYSTEMS LANE DEPARTURE PREVENTION SYSTEM in der Spur bleiben nicht aus der Spur kommen wieder in die Spur kommen zusätzliche Lenkmomente zur Reduktion kleinerer Lenkkorrekturen während des normalen Fahrens visuelle, akustische oder haptische Warnung bei drohendem Spurabkommen Reflexe? Komfortsystem Sicherheitssystem lösen schnell und reliabel das richtige Verhalten aus Gefahrenabwehrsystem Reflexe 7 „zweckgerichtete, stereotype, unwillkürliche Reaktionen auf einen bestimmten Reiz unter gleich bleibenden Bedingungen, die willentlich nicht unterdrückbar sind“ (vgl. Lehmann-Horn, 2007) automatisch, sehr schnell (Latenzzeiten von 20-120 ms) wiederholbar universell auslösbar bedingt modulierbar Verarbeitung einfacher Reflexe im Rückenmark, geringe Beteiligung höherer Zentren schnell und reliabel! Was für ein Reflex? 8 erste Frage: zweite Frage: durch welche Reize kann diese Reaktion ausgelöst werden? dritte Frage: welche Reaktion soll ausgelöst werden? lassen sich diese Reize herstellen? vierte Frage: welche weiteren Reaktionen werden ausgelöst? Das Prinzip von ReflektAS 9 1. Kritische Situation 2. Ruck am Lenkrad 3. Reflektorische Lenkbewegung 4. Kompensationsreaktion Orientierungsreaktion Erhöhtes arousal 1. Fahrer droht von der Spur abzukommen 2. Ein kurzer kräftiger Ruck in Richtung des Abkommens wird auf das Lenkrad gegeben 3. Reflektorische Lenkreaktion entgegen dem Ruck wird ausgelöst, damit einher gehen eine Orientierungsreaktion nach vorne und ein erhöhtes arousal (physiologische Erregung) 4. Es folgt eine kompensatorische Lenkbewegung, um die Fahrtrajektorie zu stabilisieren Die empirischen Untersuchungen zu ReflektAS (Kullack, 2009) 10 Stimulus Reaktion Ruck am Lenkrad Lenkreflex Moderator zweiter Ordnung Geschwindigkeit Kontext als Moderator Streckenführung Windrichtung Was für ein Reiz? 11 Variation des Stimulus Reaktionsparameter als abhängige Variablen Häufigkeit des Abkommens Integral des Abkommens über die Zeit Weite des Abkommens Dauer des Abkommens Reaktionszeit des Fahrers Reaktionszeit des Fahrzeugs Stärke des ersten Reflexes 15 verschiedene Auslegungen, erster und letzter Eingriff gleich 16 Bedingungen Selektion eines adäquaten Reizes 12 Welche Konsequenzen spiegeln die Werte wider? Auslegungen 3,5_350, 2_150 und 4_300 zeigten hinsichtlich der ausgewählten gewichteten Parameter die besten Ergebnisse Bedingung Anzahl Abkommen gesamt Dauer [s] Weite [m] Integral [m*s] RT Fahrer RT Fahrzeug 1,5_150 4 2,96 0,24 0,43 0,05 1,41 2_200 10 1,25 0,12 0,15 0,06 1,30 2,5_250 6 2,21 0,29 0,48 0,07 1,23 3_300 9 2,92 0,26 0,70 0,06 1,42 3,5_350 8 2,10 0,22 0,36 0,06 1,21 2_150 7 1,12 0,13 0,20 0,06 1,49 2,65_200 6 2,63 0,35 0,83 0,07 1,20 3,3_250_1 9 1,64 0,33 0,17 0,07 1,39 3,3_250_2 8 1,29 0,29 0,06 0,06 1,35 4_300 8 1,41 0,17 0,18 0,07 1,12 4,95_350 10 2,05 0,26 0,40 0,07 1,39 3_150 10 1,61 0,32 0,38 0,07 1,05 4_200 8 1,86 0,32 0,56 0,07 1,42 5_250 4 2,60 0,43 0,83 0,06 0,97 6_300 11 2,82 0,32 0,55 0,07 1,81 7_350 10 1,86 0,18 0,37 0,08 1,52 Was für Reaktionen? 13 Identifikation von drei Reaktionstypen Reaktionstypen Reaktionszeit des Fahrers [s] 14 (1) (2) (3) 0,7 Häufigkeit 3% 33 % 58 % 0,6 RT Fahrer (s) 0,23 0,07 0,06 0,5 RT Fahrzeug (s) 2,19 1,65 1,1 Stärke erster Reflex (°) -5 -5,15 -5,1 0,4 0,3 0,2 0,1 0,0 Reaktionstyp 1 Reaktionstyp 2 Reaktionstypen Reaktionstyp 3 Reaktionstyp eins unterschied sich signifikant von Reaktionstypen zwei und drei (F(1, 369)=251,90; p<0,05) Reaktionstyp zwei unterschied sich nicht signifikant von Reaktionstyp drei (F(1, 369)=0,155; p>0,05) Welchen Einfluss hat der Kontext als Moderator auf die Beziehung zwischen Stimulus und Reaktion? 15 Stimulus Reaktion Geschwindigkeit Kontext Freie Wahl der Geschwindigkeit Ruck konstant: 4_300 Kurven unterschiedliche Abkommensrichtungen experimentell manipuliertes und spontanes Abkommen unterschiedliche Zweitaufgaben Zweitaufgaben 16 „Ball“ „Wird der Ball größer oder kleiner?“ „Mathe“ „Ist die vorgeschlagene Lösung richtig oder falsch?“ es ergaben sich keine signifikanten Unterschiede zwischen den Zweitaufgaben beide stellen eine Ablenkungsbedingung dar Reaktionsmuster bei geradem Streckenverlauf 17 Abkommen nach links (experimentell) Abkommen nach rechts (experimentell) Reaktionsmuster in Linkskurven 18 Abkommen nach links (experimentell) Abkommen nach rechts (experimentell) Reaktionsmuster in Rechtskurven 19 Abkommen nach links (experimentell) Abkommen nach rechts (experimentell) Welchen Einfluss hat die gefahrene Geschwindigkeit auf den moderierenden Einfluss des Kontextes? 20 Stimulus Reaktion Geschwindigkeit Kontext Zweitaufgaben 21 „Ball“ „Wird der Ball größer oder kleiner?“ „Mathe“ „Ist die vorgeschlagene Lösung richtig oder falsch?“ es ergaben sich keine signifikanten Unterschiede zwischen den Zweitaufgaben beide stellen eine Ablenkungsbedingung dar Geschwindigkeit variiert zwischen den Streckenführungen 22 30 Kontrast Geraden versus Linkskurven und Rechtskurven wurde signifikant (t=6,591; df=66; p<0,001) Kontrast Linkskurven gegen Rechtskurven wurde ebenfalls signifikant (t=2,444; df=66; p=0,017) 25 Geschwindigkeit [m/s] 20 15 10 5 0 Gerade Linkskurve Streckenführung Rechtskurve Geschätztes Integral des Abkommens über die Strecke 23 Geraden Kurven 20 Geschätztes Integral über die Strecke [qm] Geschätztes Integral über die Strecke [qm] 20 18 16 14 12 10 8 6 4 2 0 Windrichtung links Windrichtung rechts 16 14 12 10 8 6 4 2 0 links rechts Linkskurve Windrichtung 18 t-Test mit korrigierten Freiheitsgraden war nicht signifikant (t=-0,31; df=21; p̂ p =0,77) Rechtskurve Kurvenverlauf keine Varianzenhomogenität, a=1 % Interaktion Windrichtung x Kurvenverlauf war nicht signifikant (F(1, 25)=0,31; pp̂ =0,58), die Haupteffekte ebenfalls nicht p̂ =0,49; (Windrichtung: F(1, 25)=0,49; p Kurvenverlauf: F(1, 25)=1,32; p̂ p =0,26) Zusammenfassung 24 Auslösung eines Lenkreflexes ist möglich Bei geeigneter Auslegung des Rucks geringe Abkommenshäufigkeiten kleines Integral des Abkommens kurze Abkommensdauer geringe Abkommensweite kurze Reaktionszeiten des Fahrers kurze Reaktionszeiten des Fahrzeugs bei Geraden und Kurven unterschiedliche Reaktionsmuster die reflektorische Reaktion ist adäquat, schnell und reliabel 25 Vielen Dank für Ihre Aufmerksamkeit! Prof. Dr. Frank Eggert Psychologische Methodenlehre und Biopsychologie Technische Universität Braunschweig [email protected] 0531/391-3146