Anleitungstext
Werbung

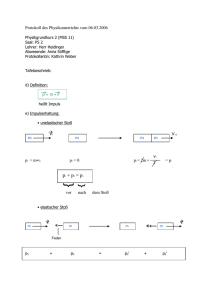
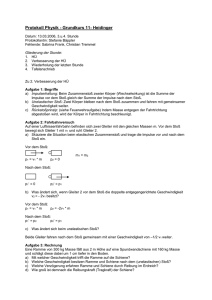
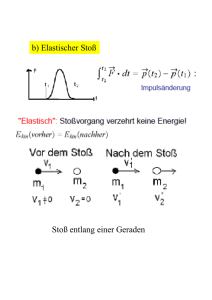
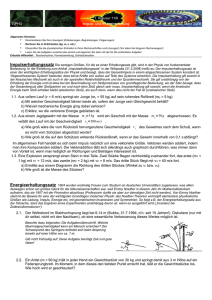
LW3 Klassische Mechanik Version vom 30. Juli 2015 Inhaltsverzeichnis 1 Grundlagen 1.1 Begriffe . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Beschreibung eindimensionaler (linearer) Bewegungen 1.3 Bewegung in 3 Dimensionen . . . . . . . . . . . . . . 1.4 Schwerpunkt und Schwerpunktsatz . . . . . . . . . . 1.5 Aufbau und Funktion des Luftkissentisches . . . . . . . . . . . 1 1 1 6 10 11 2 Gleichmäßig beschleunigte Bewegung, eindimensional 2.1 Grundlagen zur gleichmäßig beschleunigten Bewegung . . . . . . . . . . . . 2.2 Aufgabenstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Versuchsaufbau und Durchführung . . . . . . . . . . . . . . . . . . . . . . 13 13 13 13 3 Kräftefreie Bewegung 3.1 Grundlagen zur kräftefreien Bewegung . . . . . 3.2 Aufgabenstellung . . . . . . . . . . . . . . . . . 3.3 Versuchsaufbau und Durchführung . . . . . . . 3.4 Hinweise zu Protokollierung und Fehlerrechnung . . . . 16 16 16 16 19 4 Elastischer Stoß 4.1 Grundlagen zum elastischen Stoß . . . . . . . . . . . . . . . . . . . . . . . 4.2 Aufgabenstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Versuchsaufbau und Durchführung . . . . . . . . . . . . . . . . . . . . . . 19 19 20 20 5 Inelastischer Stoß 5.1 Grundlagen zum inelastischen Stoß . . . . . . . . . . . . . . . . . . . . . . 5.2 Aufgabenstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3 Versuchsaufbau und Durchführung . . . . . . . . . . . . . . . . . . . . . . 23 23 23 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . LW3 1 Grundlagen Lehr/Lernziele • Den Luftkissentisch als Experimentiereinrichtung kennen lernen. • Den Unterschied von Skalaren und Vektoren im praktischen Kontext erfahren. • Vektorrechnung im praktischen Kontext anwenden können. • Grundlegende physikalische Konzepte der Kinematik und der Dynamik wiederholen, vertiefen und im Experiment anwenden können. • Elastische und inelastische Stöße auswerten, unterscheiden und diskutieren lernen. • Grundkonzepte von Impuls, Energie und Erhaltungssätzen festigen. • Umfangreichere Auswertungen grafisch und rechnerisch durchführen können. 1 Grundlagen 1.1 Begriffe Bahnkurve (Trajektorie); x/t-, v/t- und a/t-Diagramme; gleichförmige (kräftefreie) Bewegung, starrer Körper, Winkelgeschwindigkeit, Drehimpuls, gleichförmig beschleunigte Bewegung, Newtonsche Axiome, abgeschlossenes System, Schwerpunktsatz, Impulserhaltung, elastischer und inelastischer Stoß, kinetische Energie 1.2 Beschreibung eindimensionaler (linearer) Bewegungen Ohne Beschränkung der Allgemeinheit verlaufe die Bewegung in x-Richtung Durchschnittsgeschwindigkeit Durchschnittsgeschwindigkeit = v̄ = W egelement Zeitintervall x2 − x1 x(t2 ) − x(t1 ) x(t1 + ∆t) − x(t1 ) ∆x = = = t2 − t1 t2 − t1 t1 + ∆t − t1 ∆t -1- (1) LW3 1 Grundlagen Formelzeichen v̄ x1 , x2 x(t) t1 , t2 ∆x ∆t Einheit m/s m m s m s Bezeichnung Durchschnittsgeschwindigkeit (in x-Richtung) Ort zur Zeit t1 bzw. t2 Funktion des Ortes in Abhängigkeit von der Zeit Anfangs- und Endzeitpunkt des Zeitintervalls zurückgelegtes Wegelement Zeitintervall Die Durchschnittsgeschwindigkeit kann für jede Art der Bewegung berechnet werden, egal ob sich die momentane Geschwindigkeit während des betrachteten Zeitraumes ändert oder nicht. Am Beispiel von Abb.1 ist das Ablesen der Durchschnittsgeschwindigkeit aus dem Weg/Zeit-Diagramm nachvollziehbar. Die Durchschnittsgeschwindigkeit v̄ entspricht dem Anstieg der Sekante. Abbildung 1: Ermitteln der Durchschnittsgeschwindigkeit aus dem x/t-Diagramm Momentangeschwindigkeit Im Grenzfall eines unendlich kleinen Zeitintervalls wird aus der Sekante aus Abb. 1 die Tangente der Kurve. Die Steigung der Tangente der x/t-Kurve zur Zeit t1 ist die Geschwindigkeit des Objekts zur Zeit t1 . v(t) = lim ∆t→0 ∆x dx(t) x(t + ∆t) − x(t) = lim = = ẋ(t) ∆t→0 (t + ∆t) − t ∆t dt -2- (2) LW3 1 Grundlagen Formelzeichen v(t) x(t) ∆x ∆t ẋ(t) Einheit m/s m m s m/s Bezeichnung Momentangeschwindigkeit zur Zeit t Funktion des Ortes in Abhängigkeit von der Zeit zurückgelegtes Wegelement Zeitintervall Ableitung der Wegfunktion nach der Zeit Am Beispiel von Abb.2 ist das Ablesen der Momentangeschwindigkeit aus dem Weg/ZeitDiagramm am Ort x1 zu Zeitpunkt t1 nachvollziehbar. Abbildung 2: Ermitteln der Momentangeschwindigkeit aus dem x/t-Diagramm Mittlere Beschleunigung mittlere Beschleunigung = Geschwindigkeitsänderung Zeitintervall ā = Formelzeichen ā x1 , x2 v1 , v2 t1 , t2 ∆vx ∆t Einheit m/s2 m m/s s m/s s v2 − v1 ∆v = t2 − t1 ∆t Bezeichnung Durchschnittsbeschleunigung (in x-Richtung) Ort zur Zeit t1 bzw. t2 Geschwindigkeit zur Zeit t1 bzw. t2 Anfangs- und Endzeitpunkt des Zeitintervalls Geschwindigkeitsänderung Zeitintervall -3- (3) LW3 1 Grundlagen Momentanbeschleunigung a(t) = lim ∆t→0 Formelzeichen ax (t) vx (t) ∆vx ∆t v̇(t) ẋ(t) ∆vx dv(t) d2 x = = v̇(t) = 2 = ẍ(t) ∆t dt dt Einheit m/s2 m/s m/s s m/s2 m/s (4) Bezeichnung Momentanbeschleunigung zur Zeit t Momentangeschwindigkeit zur Zeit t Geschwindigkeitsänderung Zeitintervall Ableitung der Geschwindigkeit nach der Zeit Ableitung der Wegfuntion nach der Zeit Am Beispiel von Abb.3 ist das Ablesen der Momentanbeschleunigung aus dem Geschwindigkeit/ZeitDiagramm zum Zeitpunkt t1 nachvollziehbar. Abbildung 3: Ermitteln der Momentanbeschleunigung aus dem v/t-Diagramm Geschwindigkeit = Integral der Beschleunigung über die Zeit Z t v(t) = v(t0 ) + a(t)dt (5) t0 Weg = Integral der Geschwindigkeit über die Zeit Z t x(t) = x(t0 ) + v(t)dt t0 -4- (6) LW3 1 Grundlagen Abbildung 4: Bewegungsdiagramme einer eindimensionalen gleichmäßig beschleunigten Bewegung Aus den Gleichungen 5 und 6 folgt für die gleichförmig beschleunigte Bewegung mit a(t) = a = const und den Anfangsbedingungen v(0) = v0 und x(0) = x0 v(t) = a · t + v0 a x(t) = t2 + v0 t + x0 2 (7) (8) Gemäß Newton’s Grundgleichung der Mechanik (Gleichung 9) kommt es immer dann zu einer gleichmäßig beschleunigten Bewegung, wenn eine konstante äußere Kraft auf einen Massenpunkt oder im Schwerpunkt eines ausgedehnten Körper bzw. Systems von Massen wirkt, wie etwa die Gewichtskraft im Schwerefeld der Erde. Abb. 4 zeigt die Bewegungsdiagramme einer eindimensionalen gleichmäßig beschleunigten Bewegung in Abhängigkeit von der Zeit. F~ = m · ~a Formelzeichen F~ m ~a Einheit Bezeichnung N kg m/s2 wirkende Kraft Masse resultierende Beschleunigung -5- (9) LW3 1 Grundlagen 1.3 Bewegung in 3 Dimensionen Abbildung 5: Beschreibung einer 3-dimensionalen Bewegung mit Vektoren Die Bewegung eines Massenpunktes in 3 Dimensionen beschreibt man unter Verwendung des kartesischen Koordinatensystems mit Hilfe des Ortsvektors ~r(t), wie in Abb. 5 ersichtlich. Dieser hat drei Komponenten: x(t), y(t), z(t). x(t) ~r(t) = y(t) z(t) (10) Mittlere Geschwindigkeit einer dreidimensionalen Bewegung Die mittlere Geschwindigkeit ~v̄ einer mehrdimensionalen Bewegung im Zeitintervall ∆t wird beschrieben durch (vgl. Abb. 6): ∆x ∆t ~r(t2 ) − ~r(t1 ) ∆~r ∆y ~v̄ = = = (11) ∆t t2 − t1 ∆t ∆z ∆t -6- LW3 1 Grundlagen Abbildung 6: Ermittlung der mittleren Geschwindigkeit bei einer 3-dimensionalen Bewegung mit Vektoren Momentangeschwindigkeit einer dreidimensionalen Bewegung Die Momentangschwindigkeit eines Massenpunktes entlang einer Bahnkurve wird auch Bahngeschwindigkeit genannt. Sie ergibt sich durch den Grenzübergang ∆t → 0: ẋ(t) d~r ∆~r ẏ(t) = = ~v (t) = lim (12) ∆t→0 ∆t dt ż(t) Der Vektor der Momentangeschwindigkeit weist immer in Richtung der Tangente im jeweiligen Punkt ~r(t) der Bahnkurve. Abbildung 7: Ermittlung der Momentangeschwindigkeit bei einer 3-dimensionalen Bewegung mit Vektoren -7- LW3 1 Grundlagen Beispiel einer mehrdimensionalen Bewegung: Die gleichförmige Kreisbewegung Die gleichförmige Kreisbewegung (Rotation) ist ein Spezialfall der mehrdimensionalen Bewegung. Die Bahnkurve ist ein Kreis. Der Betrag des Bahngeschwindigkeitvektors |~v (t)| ist konstant, seine Richtung jedoch zeitabhängig. Die Bewegung auf einer Kreisbahn ist daher eine beschleunigte Bewegung. ~v (t) liegt tangential an die Kreisbahn und normal auf den Ortsvektor ~r(t) bzw. ~r⊥ (t) siehe Abb. 8 Abbildung 8: Bahngeschwindigkeit bei Rotation Bei der gleichförmigen Kreisbewegung eines ausgedehnten starren Körpers ist der Betrag der Bahngeschwindigkeit v(t) eines Massenelements abhängig von dessen Abstand r⊥ von der Drehachse. Der von den Radiusvektoren in der Zeit ∆t überstrichenene Winkel ∆ϕ ist für alle Massenelemente konstant. Der Grenzwert heißt Winkelgeschwindigkeit ω (Einheit rad/s). Winkelgeschwindigkeit W inkelgeschwindigkeit = Drehwinkelelement Zeitintervall ω = lim ∆t→0 ∆ϕ dϕ = = ϕ̇ ∆t dt (13) Der Vektor der Winkelgeschwindigkeit ω ~ beschreibt zusätzlich die Richtung der Drehachse sowie den Drehsinn der Rotation. Zusammenhang mit der Bahngeschwindigkeit: v = ω · r⊥ ~v = d~r =ω ~ × ~r dt (14) Günstigerweise wählt man das Koordinatensystem so, dass die Kreisbahn in der x-y-Ebene liegt. ω ~ weist dann in z-Richtung. Mit Hilfe ebener Polarkoordinaten lassen Ortsvektor und Bahngeschwindigkeitsvektor wie folgt berechnen: -8- LW3 1 Grundlagen Abbildung 9: Kreisbewegung in der Ebene Ortsvektor x(t) r cos(ω t) ~r(t) = y(t) = r sin(ω t) z(t) 0 (15) Bahngeschwindigkeit Bahngeschwindigkeit = W inkelgeschwindigkeit × Ortsvektor ~v = d~r =ω ~ × ~r dt ẋ(t) 0 r cos(ω t) −rω sin(ω t) ~v = ẏ(t) = 0 × r sin(ω t) = rω cos(ω t) ż(t) ω 0 0 (16) (17) Die Anwendung des Vektorprodukts ist für die Auswertungen der Experimente mit dem Luftkissentisch von Bedeutung. Beachten Sie die Zusatzinformation zur Vektorrechnung auf der eLearning Seite des Anfängerpraktikums. -9- LW3 1 Grundlagen Gleitreibung: Gleitreibung tritt bei Bewegungen auf, wenn ein (starrer) Körper auf der Berührungsfläche gleitet. Die Gleitreibungskraft ist materialspezifisch und von der Größe der Oberfläche unabhängig. Sie ist der Geschwindigkeit des Körpers entgegengerichtet und ihr Betrag ist proportional zur Normalkraft (Kraft, die der Körper auf die Oberfläche ausübt und vice versa). FGR = µG · FN (18) Formelzeichen FGR µG FN Einheit N 1 N Bezeichnung Gleitreibungskraft Gleitreibungskoeffizient Normalkraft Der Proportionalitätsfaktor µG heißt Gleitreibungskoeffizient oder Gleitreibungszahl und ist materialabhängig. Er kann Tabellen diverser Nachschlagewerke entnommen werden. Die Abb. 10 zeigt eine grafische Aufbereitung von Gleitreibung und Haftreibung. Erstere existiert nur bei Bewegung relativ zum Untergrund und Haftreibung (besser Haftung) nur wenn der Körper ruht. Abbildung 10: Haftung und Gleitreibung 1.4 Schwerpunkt und Schwerpunktsatz Als Schwerpunkt (oder auch Massenmittelpunkt) wird jener Punkt bezeichnet, der in einem System aus (beliebig vielen) verschiedenen Einzelmassen, der Angriffspunkt der resultierenden (Gewichts-)Kraft ist. Ein starrer Körper, der im Schwerpunkt unterstützt - 10 - LW3 1 Grundlagen wird, befindet sich im Gleichgewicht. Insbesondere übt die Gewichtskraft bezogen auf den Schwerpunkt eines Körpers kein Drehmoment aus. Die Bewegung des Schwerpunkts wird durch die inneren Kräfte des Körpers nicht verändert. Der Schwerpunkt bewegt sich wie ein Punktteilchen mit der Masse des gesamten Körpers, an dem die Resultierende aller äußeren Kräfte angreift. Der Ortsvektor eines Schwerpunktes ist im allgemeinen gegeben durch P ~ = Pi r~i ∆mi . R i ∆mi (19) Beispiel für eine Schwerpunktsbestimmung bei 2 Körpern: 2 Körper der Massen m1 = 1 kg und m2 = 3 kg sind durch eine (masselose) starre Verbindung der Länge l = 2 m verbunden. Das Koordinatensystem wird so gewählt, dass m1 im Ursprung und m2 auf der x-Achse liegt. Die Koordinaten des Schwerpunktes lauten dann: 0 l r~1 = , r~2 = 0 0 ~ = m1 r~1 + m2 r~2 = R m1 + m2 1, 5m 0 1.5 Aufbau und Funktion des Luftkissentisches Ein Luftkissentisch wie er in Abb. 11 zu sehen ist, ist eine Vorrichtung, die das Studium von kinematischen und dynamischen Zusammenhängen unter Vernachlässigung der Reibung ermöglicht. - 11 - LW3 1 Grundlagen Abbildung 11: Luftkissentisch und Gleiter Gleitkörper können sich auf einer waagrechten Glasplatte annähernd reibungsfrei bewegen, indem sie auf einem Luftpolster gleiten, das sie mit einer kleinen elektrischen Luftpumpe erzeugen. Auf der Glasplatte ist elektrisch leitendes Metallpapier aufgespannt. Metallische Schreibstifte, die an den Gleitkörpern befestigt sind, schwärzen das Papier, wenn eine Spannung an sie gelegt wird. Ein Stift befindet sich auf der Mittenachse der Gleitkörper und zeichnet die Schwerpunktsbewegung auf, ein weiterer, der wahlweise zugeschaltet werden kann, befindet sich an einem außen angebrachten Kunststoffring. Damit die Zeit als Parameter der Bewegung erfasst werden kann, wird die Spannung mit einer Frequenz von 50 Hz unterbrochen, sodass die Bahnkurve strichliert erscheint. Die waagerechte Stellung des Luftkissentisches soll mit Hilfe einer beiliegenden Wasserwaage überprüft und ggf. mit den verstellbaren Füßen hergestellt werden. Die Gleiter werden über ein vom Versorgungsmast (siehe Abb. 11) hängendes Kabel mit Spannung versorgt. Der Kippschalter M muss eingeschaltet sein, damit das Gebläse arbeitet. Der zweite Schalter dient dazu, den Schreibstift in der Mitte des Körpers ein- und auszuschalten. Der Schreibstift am Rand des Körpers bleibt immer eingeschaltet, wenn der zugehörige Kontakt gesteckt ist. Die Aufzeichnung der Bewegung beginnt erst, wenn der Fuß- oder Handschalter betätigt wird. Man achte darauf, dass die Stahlschiene ordentlich auf das Metallpapier geschraubt ist, damit die Spannungsversorgung gewährleistet ist! ACHTUNG: Das Metallpapier ist teuer und muss daher sparsam verwendet werden. Üben - 12 - LW3 2 Gleichmäßig beschleunigte Bewegung, eindimensional Sie die Versuche zuerst mehrmals ohne Aufzeichnung, um dann bei der ersten Aufzeichnung nach Möglichkeit sofort ein brauchbares Bild zu bekommen. Alle Versuche sollten auf zwei Blätter passen! Beschriften Sie die Kurven sofort, sodass Verwechslungen ausgeschlossen sind. 2 Gleichmäßig beschleunigte Bewegung, eindimensional 2.1 Grundlagen zur gleichmäßig beschleunigten Bewegung siehe Kapitel 0.2 2.2 Aufgabenstellung 1. Zeichnen Sie auf dem Metallpapier des Luftkissentisches eine gleichmäßig beschleunigte Bewegung auf und analysieren Sie diese (vgl. Abb. 12). 2. Ermitteln Sie dazu alle 0,1 s den Betrag des Ortsvektors und fertigen Sie das dazugehörige Bewegungsdiagramm x(t) an. 3. Ermitteln Sie mit Hilfe eines Computerprogrammes über Regressionsanalyse (Polynom 2.Ordnung) a, v0 und x0 . 4. Ermitteln Sie über Differentiation die Bewegungsgleichungen v(t) und a(t) und fertigen Sie die dazugehörigen Diagramme an. 5. Bestimmen Sie jene Kraft, welche die Beschleunigung des Massensystems m1 + m2 bewirkt und vergleichen Sie diese mit der theoretisch wirkenden Kraft, für den Fall, dass m1 reibungsfrei gleitet. 6. Bestimmen Sie den Gleitreibungskoeffizienten µg für den Gleiter m1 . 2.3 Versuchsaufbau und Durchführung Verwenden Sie den Gleiter mit dem Filzring. Bringen Sie das Umlenkrad an der Metallschiene an. Befestigen Sie eine Masse von 20 g mit einem Faden, den Sie über die Umlenkrolle führen, am Elektrodenhalter des Filzringes (siehe Abb. 13). - 13 - LW3 2 Gleichmäßig beschleunigte Bewegung, eindimensional Abbildung 12: Registrierung einer gleichmäßig beschleunigten Bewegung - 14 - LW3 2 Gleichmäßig beschleunigte Bewegung, eindimensional Abbildung 13: Gleiter für Beschleunigungsexperiment Schalten Sie den Motor ein und halten Sie den Gleiter fest. Versuchen Sie möglichst gleichzeitig den Gleiter loszulassen und den Handtaster für die Aufzeichnung zu drücken. Geben Sie jedoch acht, dem Gleiter dabei keinen zusätzlichen Impuls zu erteilen. Bevor der Gleiter die Begrenzung erreicht und zurückgestoßen wird, beenden Sie die Aufzeichnung durch Loslassen des Tasters. Sehen Sie sich dazu das Video auf der eLearning Seite des Anfängerpraktikums an. Auswertung Führen Sie die Auswertung auf einer Kopie des Metallpapiers durch. siehe Abbildung 12 - 15 - LW3 3 Kräftefreie Bewegung 3 Kräftefreie Bewegung 3.1 Grundlagen zur kräftefreien Bewegung Die Geschwindigkeit eines Körperpunktes eines starren Körpers kann als Überlagerung der Schwerpunktsbewegung und einer Rotation (vgl. Gleichung 16) dargestellt werden: ~v = v~s + ω ~ × ~r (20) 3.2 Aufgabenstellung 1. Zeichnen Sie auf dem Metallpapier des Luftkissentisches eine kräftefreie Bewegung mit Rotationsanteil auf und analysieren Sie diese (vgl. Abb. 14). Dabei bewegt sich der Schwerpunkt des Gleiters kräftefrei also unbeschleunigt entlang einer Geraden, während seine Peripherie um die Schwerpunktsachse rotiert. Sehen Sie sich dazu das Video auf der eLearning Seite des Anfängerpraktikums an. 2. Ermitteln Sie für die Auswertung alle 0,2 s die Schwerpunktgeschwindigkeit und fertigen Sie die dazugehörigen Bewegungsdiagramme (x/t, v/t und a/t) an. 3. Fertigen Sie in gleicher Weise Bewegungsdiagramme auch für den Winkel ϕ an und ermitteln Sie daraus die Winkelgeschwindigkeit ω und ihren Fehler. 4. Berechnen Sie zu einem Zeitpunkt Ihrer Wahl den Peripherie-Geschwindigkeitsvektor ~v aus der Beziehung ~v = v~s + ω ~ × ~r und zeichnen Sie dessen Richtung in die Auswertung ein. Damit können Sie überprüfen, ob Ihre Berechnung richtig war. 3.3 Versuchsaufbau und Durchführung Versehen Sie einen der beiden Gleiter mit dem Filzring und schließen Sie die PeripherieZusatzelektrode an (Abb. 15). Stoßen Sie den Gleiter an und versetzten Sie diesen gleichzeitig in Rotation. - 16 - LW3 3 Kräftefreie Bewegung Abbildung 14: Bewegung eines strarren Körpers. Darstellung des bei der Rotation zurückgelegten Winkels - 17 - LW3 3 Kräftefreie Bewegung Abbildung 15: Gleiter mit Peripherie-Zusatzelektrode Beim Loslassen schalten Sie die Aufzeichnung ein, indem Sie den Tastschalter gedrückt halten. Bevor der Gleiter die Begrenzung erreicht und zurückgestoßen wird, beenden Sie die Aufzeichnung durch Loslassen des Tasters. Auswertung Führen Sie die Auswertung auf einer Kopie des Metallpapiers, wie in Abbildung 14 dargestellt, aus. Dazu bestimmen Sie alle 0,2 Sekunden die Schwerpunktsgeschwindigkeit und zeichnen Sie in diesen Intervallen jeweils auch den Radiusvektor (Schwerpunkt-Peripheriepunkt) ein (siehe Abb. 14). Der Vektor der Schwerpunktsgeschwindigkeit besitzt 3 Komponenten (x-, y- und z-Richtung). Wählen sie das Koordinatensystem so, dass x-y-Ebene der Papierebene entspricht und die x-Achse entlang der Bewegungsrichtung des Schwerpunktes verläuft. Tragen Sie den bei der Rotation überstrichenen Winkel (Peripheriepunkt) in Bezug auf eine gewählte Referenzrichtung gegen die Zeit auf (Achtung: Der Winkel muss stets in Rotationsrichtung von der Referenzrichtung bis zum aktuellen Radiusvektor gemessen werden und kann selbstverständlich auch größer als 2π oder kleiner als 0 werden). - 18 - LW3 4 Elastischer Stoß Der Anstieg in den x/t- bzw. ϕ/t-Diagrammen stellt den Betrag Schwerpunktsgeschwindigkeit vs bzw. den Betrag der Winkelgeschwindigkeit ω dar. Berechnen Sie für einen Zeitpunkt t den Bahngeschwindigkeitsvektor ~v des Peripheriepunktes und zeichnen Sie seine Richtung in der grafischen Auswertung im entsprechenden Punkt der Bahnkurve ein. Stimmt die Richtung mit der graphischen Abschätzung (Tangential an die Bahnkurve) überein? Überprüfen Sie den Rotationssinn mit der Drei-Finger-Regel. 3.4 Hinweise zu Protokollierung und Fehlerrechnung Das Hauptaugenmerk bei allen Versuchen dieser Praktikumseinheit liegt auf dem Erkennen der physikalischen Zusammenhänge und der Praxis im Umgang mit vektoriellen Größen. Ausnahmsweise kommt daher einer exakten und detaillierten Fehlerrechnung keine sonderlich große Bedeutung zu. Jedenfalls sind die Fehler aus den Regressionsanalysen anzugeben und der Einfluss anderer Fehlerquellen auf die Ergebnisse realistisch abzuschätzen. Dieser Hinweis gilt auch für alle folgenden Versuche. 4 Elastischer Stoß 4.1 Grundlagen zum elastischen Stoß Erhaltungssätze: In einem abgeschlossenen System (d.h. einem System von Massen, hier m1 und m2 ), auf das keine äußeren Kräfte wirken, gelten die folgenden Erhaltungssätze: • Impulssatz: In einem abgeschlossenen System ist der Gesamtimpuls zeitlich konstant: m1~v1 + m2~v2 = m1 w ~ 1 + m2 w ~2 (21) ~v1 , ~v2 Geschwindigkeiten vor dem Stoß, w ~ 1, w ~ 2 Geschwindigkeiten nach dem Stoß • Schwerpunktsatz: Der Schwerpunkt eines abgeschlossenen Systems bewegt sich geradlinig gleichförmig, unabhängig von den Bewegungen und Wechselwirkungen der Teile des Systems. • Energiesatz: Beim vollkommen elastischen Stoß findet keine Umwandlung von kinetischer Energie in Wärme statt, die kinetische Energie kann zwar auf die Stoßpartner anders verteilt werden, bleibt aber erhalten: m1 w~1 2 m2 w~2 2 m1 v~1 2 m2 v~2 2 + = + 2 2 2 2 - 19 - (22) LW3 4 Elastischer Stoß 4.2 Aufgabenstellung 1. Zeichnen Sie auf dem Metallpapier des Luftkissentisches einen elastischen Stoß zweier Gleiter unterschiedlicher Massen auf und analysieren Sie diesen (vgl. Abb. 16). Sehen Sie sich dazu das Video auf der eLearning Seite des Anfängerpraktikums an. 2. Ermitteln Sie 0,2 - 0,3 s vor und 0,2 - 0,3 s nach dem Stoß aus den Bahnkurven die Geschwindigkeitsvektoren der Gleiter. 3. Ermitteln Sie daraus die zugehörigen Impulsvektoren. 4. Überprüfen Sie den Impulssatz durch grafische und numerische Vektor-Addition der Impulse vor und nach dem Stoß. 5. Ermitteln Sie die kinetische Energie des Systems vor- und nach dem Stoß. Diskutieren Sie eine gegebenenfalls auftretende Differenz. 6. Bestimmen Sie die Lage des Schwerpunktes der beiden Massen alle 0,2 s und zeichnen Sie diese in Ihre Auswertung ein. 7. Diskutieren Sie die entstandene Bahnkurve des Schwerpunktes. 4.3 Versuchsaufbau und Durchführung Einer der beiden Gleiter wird mit der Zusatzmasse beschwert und beide erhalten die Federringe für elastische Stöße wie aus Abb. 17 ersichtlich. Setzen Sie die beiden Gleiter so in Bewegung, dass sie auf schrägen Bahnen gegeneinander laufen. Betätigen Sie unmittelbar nach dem Loslassen den Handtaster für die Aufzeichnung und beenden Sie diese, bevor einer der beiden Gleiter die Begrenzung erreicht und zurückgestoßen wird. Ermitteln Sie die Massen der beiden Gleiter. Auswertung Führen Sie die Auswertung auf einer Kopie des Metallpapiers, wie in Abbildung 16 dargestellt, aus. Für die grafische Addition der Impulsvektoren suchen Sie sich den größtmöglichen Zeit- - 20 - LW3 4 Elastischer Stoß Abbildung 16: Registrierung eines elastischen Stoßes - 21 - LW3 4 Elastischer Stoß Abbildung 17: Gleiter für elastischen Stoß raum vor und nach dem Stoß aus, der eine gleichförmige Bewegung der einzelnen Gleiter darstellt. Es muss jedoch für beide Gleiter der gleiche Zeitraum sein (Abzählen der Referenzmarkierungen). Nachdem nun ∆t für die beiden Bereiche vor und nach dem Stoß beider Gleiter gleich ist, sind die jeweiligen Ortsvektoren direkt proportional zu den Geschwindigkeiten. Da sich der Impuls jedoch aus Masse mal Geschwindigkeit ergibt, muss nur noch der Massenunterschied der beiden Gleiter für die Längen der jeweiligen Ortsvektoren (Geschwindigkeitsvektoren) berücksichtigt werden. So erhält man Vektoren, die zu den Impulsvektoren direkt proportional sind. Für die grafische Addition müssen die Vektoren nur mehr mit dem Geodreieck parallelverschoben werden. Die Addition der Impulse vor dem Stoß kann so mit der Addition der Impulse nach dem Stoß verglichen werden. Durch das Einzeichnen eines Koordinatensystems Ihrer Wahl, können Sie die Koordinaten der Vektoren bestimmen und die numerische Vektoraddition durchführen. Zur Auswertung des elastischen Stoßes gibt es ein Tutorial in den Zusatzinfos auf der eLearning-Seite dieses Kurstages. Ist der Impuls erhalten? - 22 - LW3 5 Inelastischer Stoß 5 Inelastischer Stoß 5.1 Grundlagen zum inelastischen Stoß Beim zentralen inelastischen Stoß bleiben die beiden Körper nach dem Stoß aneinander hängen und bewegen sich mit der gleichen Geschwindigkeit w~1 = w~2 = w ~ (23) Wie beim elastischen Stoß gelten auch beim inelastischen Stoß der Impulssatz und die Erhaltung der Schwerpunktsbewegung. Ein Teil der kinetischen Energie wird in andere Energieformen (Deformationsenergie, Wärme) umgewandelt. Der Verlust an kinetischer Energie beträgt bei diesem Experiment ~2 m1 v~1 2 (m1 + m2 )w − U= 2 2 (24) Bei dezentralen inelastischen Stößen kann es zu einer Rotation der Stoßpartner kommen und somit zu einer weiteren Energieumwandlung von kinetischer in Rotationsenergie. Ist dies der Fall, so muss berücksichtigt werden, dass die Stoßpartner nach dem Stoß zwei unterschiedlich Geschwindigkeiten haben! 5.2 Aufgabenstellung 1. Zeichnen Sie auf dem Metallpapier des Luftkissentisches einen inelastischen Stoß zweier Gleiter unterschiedlicher Massen auf und analysieren Sie diesen (vgl. Abb. 19). Der Körper mit der kleineren Masse soll vor dem Stoß ruhen. Sehen Sie sich dazu das Video auf der eLearning Seite des Anfängerpraktikums an. 2. Ermitteln Sie vor und nach dem Stoß aus den Bahnkurven die Geschwindigkeitsvektoren der Gleiter. 3. Zeichnen Sie die Richtungen und relativen Längen der zugehörigen Impulsvektoren ein. 4. Überprüfen Sie den Impulssatz durch grafische und numerische Vektor-Addition der Impulse vor und nach dem Stoß. 5. Bestimmen Sie die Lage des Schwerpunktes der beiden Massen alle 0,2 s und zeichnen Sie diese in Ihre Auswertung ein. - 23 - LW3 5 Inelastischer Stoß 6. Diskutieren Sie die entstandene Bahnkurve des Schwerpunktes. 7. Ermitteln Sie die kinetische Energie des Systems vor und nach dem Stoß. Diskutieren Sie, wie viel kinetische Energie beim Stoß maximal in andere Energieformen umgewandelt werden kann. Welcher Anteil der kinetischen Energie muss unter Berücksichtigung der Schwerpunktbewegung erhalten bleiben? 5.3 Versuchsaufbau und Durchführung Einer der beiden Gleiter wird mit der Zusatzmasse beschwert und beide erhalten die Filzringe (Klettbänder) für inelastische Stöße wie aus Abb. 18 ersichtlich. Setzen Sie den schwereren Gleiter so in Bewegung, dass er leicht dezentral auf den zweiten, ruhenden Körper trifft. Betätigen Sie beim Loslassen den Handtaster für die Aufzeichnung und beenden Sie diese, bevor einer die beiden Gleiter die Begrenzung erreichen und zurückgestoßen werden. Abbildung 18: Gleiter für inelastischen Stoß Ermitteln Sie die Massen der beiden Gleiter. Auswertung Zur Auswertung des inelastischen Stoßes gibt es ein Tutorial in den Zusatzinfos auf der eLearning-Seite dieses Kurstages. Führen Sie die Auswertung auf einer Kopie des Metallpapiers wie in Abbildung 19 dargestellt, aus. Die grafische und numerische (vektorielle) Auswertung erfolgt wie im vorhergehenden Experiment. Berücksichtigen Sie die unterschiedlichen Geschwindigkeiten der Gleiter nach dem dezentralen Stoß und die dadurch entstandene Rotationsbewegung. - 24 - LW3 5 Inelastischer Stoß Abbildung 19: Registrierung eines inelastischen Stoßes - 25 -