einer pdf-Datei - Sternwarte Reichenbach
Werbung

Projekt: Montierung
Von Thomas Erdrich & Michael Fitschen
Inhalt
1
2
Maß- und Isterfassung..................................................................................................................... 2
Momentenberechnung ................................................................................................................... 3
2.1
2.2
2.3
2.4
3
Auflösungsvermögen....................................................................................................................... 6
3.1
3.2
3.3
4
5
Annahmen ............................................................................................................................... 4
Berechnung des Gegengewichts ............................................................................................. 4
Momentengleichgewichte....................................................................................................... 4
Aufzubringendes Moment....................................................................................................... 6
Auflösungsvermögen des Teleskops ....................................................................................... 6
Auflösungsvermögen Gesamt ................................................................................................. 7
Nötige Schrittauflösung ........................................................................................................... 7
Auswahl des Motors ........................................................................................................................ 7
Auswahl des Getriebes .................................................................................................................... 8
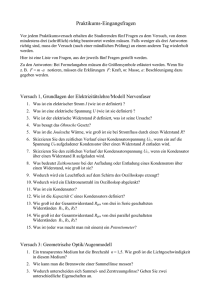
1 Maß- und Isterfassung
Gewicht ohne Motoren ca. 39 kg
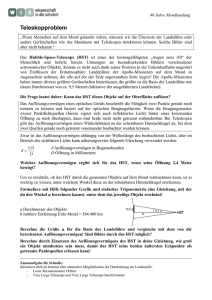
Tabelle 1 - Daten der Schnecken und Schneckenräder
Wälzkreisdurchmesser Schneckenrad RA / DEC
Zähnezahl Schneckenrad RA / DEC
Wälzkreisdurchmesser Schnecke
Durchmesser Schneckenwelle
102 100
22 10 Abbildung 1 - Adapterplatte für die
Aufnahme des Teleskops
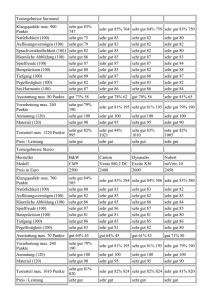
Abbildung 2 - Skizze Abmaße
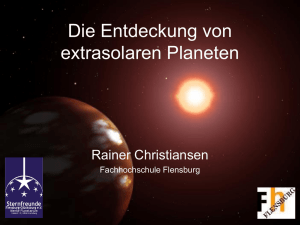
Abbildung 3 - Säulenstativanschluss
Aufgaben:
•
•
•
•
•
•
•
Konstruktion eines Säulenstativs zur Verlängerung der vorhandenen Säule. Adaption nach
Abbildung 3.
Verbesserung der Justage-Möglichkeiten durch Teils neue Gewinde in der Gehäuseplatte,
sowie Konterung der vorhandenen Schrauben.
Berechnung des nötigen Halte- und Drehmoments.
Berechnung der nötigen Schrittauflösung der Schrittmotoren.
Auswahl der Schrittmotoren.
Auswahl der Getriebe.
Umbau des Teleskops
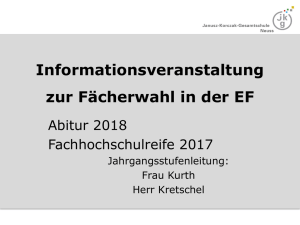
2 Momentenberechnung
Abbildung 4 – Kräfteplan
2.1 Annahmen
Auslegungsmassen für ein 18-Zoll-Newton, 3,5-Zoll-Leitrohr und DSLR am OAZ:
Tabelle 2 - Auslegungsmassen bzw. Kräfte
Hauptrohr
Leitrohr
Kamera & OAZ
35 3 2 343 29,4 19,6 Auslegungshebel wie in Abbildung 4 dargestellt, bedingt durch Geometrie aus Abb. 2.
Tabelle 3 - Auslegungshebel
380 700 300 320 2.2 Berechnung des Gegengewichts
In Position (1) (Gegengewichtsstange horizontal) wird das Teleskop austariert. So kann die nötige
Massenkraft der Gegengewichte bestimmt werden, welche zur weiteren Berechnung nötig sind.
Alle Momente sind linksdrehend (gegen UZS) positiv angenommen.
Fall (1) (Abbildung 4,
0°)
" # 0 · % & ' ( · % · ) &*+, -*./ (·0-*1, ·2
3
(Gleichung 1)
) 455 678 9
) :55 6; <=
Es ist zu überlegen, ob die die Gegengewichtsstange verlängert werden soll, damit die Masse des
Gegengewichts geringer gehalten werden kann.
2.3 Momentengleichgewichte
In verschiedenen Stellungen der RA-Achse soll das jeweils resultierende Moment bestimmt werden,
welches vom Motor durch dessen Hebelarme, Getriebeübersetzungen und Haltemoment
überwunden werden soll. Es wäre möglich, das resultierende Moment durch eine „adaptive
Gewichtsverschiebung“ gering zu halten.
Allgemeiner Fall, Teleskop rechts:
#>?@&>?( · · cos D ' · · cos D ' · & · cos D % · sin D( % · · cos D
) #>?@&>?( cos D · & · ' · % · ( ' · & · cos D % · sin D(
(Gleichung 2)
Allgemeiner Fall, Teleskop rechts:
Mit G 180 % D:
#>?@&HI( · · cos G % · · JKG % · · JKG % · & · JKG ' · KLMG(
) #>?@&HI( JKG · & · % · % · ( % · & · JKG ' · KLMG(
(Gleichung 3)
Die Drehrichtung des durch die Kamera verursachten Moments wechselt bei:
DNIOO arctan
0
S
(Gleichung 4)
wird aber schon durch den Vorzeichenwechsel des Hebelarms d in den Gleichungen 2 und 3
berücksichtigt. Für den allgemeinen Fall kann die Excel-Tabelle „Berechnung Momente.xlsx“
herangezogen werden. Dort können alle Lasten und Hebelarme neu definiert werden.
Für einige Winkel und die unter 2.1 genannten Daten sind nachfolgend einige Beispiele aufgeführt.
MUVW&UV( wird in diesem Fall maximal, wenn α 90° (trifft nicht unbedingt bei abweichender
Geometrie zu)
Tabelle 4 - Berechnungstabelle mit Winkel 90°
Eingabewerte
m (Hauptrohr)
m (Leitrohr)
m (Kamera + OAZ)
TK befindet sich
Winkel
Massen
35 kg
3 kg
2 kg
a=
b=
c=
d=
rechts
90 °
Berechnung des Gegengewichts
F(GG)=
m (Gegengewicht)=
528,43 N
53,867 kg
Resultierendes Moment
in rad
F(KA)-VZW-Winkel
Vorzeichenwechsel
M(res)=
1,5708
49,899 °
1
-6,278 Nm
Das maximale resultierende Drehmoment beträgt also -6,3 Nm.
Hebelarme
380 mm
700 mm
300 mm
320 mm
2.4 Aufzubringendes Moment
Bei direktem Antrieb der Schneckenwelle, also ohne Getriebe und bei einem Getriebewirkungsgrad
müsste der Motor ein Moment aufbringen, welches um das Übersetzungsverhältnis
LY3Z[?3N?[\?]>I?2? verringert wird.
LY3Z[?3N?[\?]>I?2? ^
`Mab caMdd
1
_ eäaMdab caMddMg 100
Das maximale Haltemoment des Motors müsste bei h 1 demzufolge gleich #Z ijkl
^mm
8, 8n7 9: sein.
Der Wirkungsgrad eines Schneckengetriebes liegt aufgrund seiner hohen Gleitbewegung meistens
deutlich unter 50%. Deshalb, und nach Berücksichtigung einiger Zulagen wegen ungünstiger
Austarierung sollte das Haltemoment mit einem Gesamtwirkungsgrad aller Getriebe, welcher auch
noch zusätzlich sehr hohe Sicherheiten beinhalten soll, von 20% verrechnet werden. Somit wird das
vom Motor aufzunehmende Moment:
#?>Z #>?@o
h?]>I?2? 8, 7p6 9:
Abbildung 5 - Schneckengetriebe
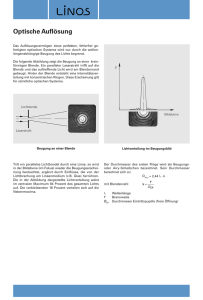
3 Auflösungsvermögen
3.1 Auflösungsvermögen des Teleskops
Das Auflösungsvermögen qr des Teleskops berechnet sich überschlägig nach Gleichung 5:
qr s 115/u (Gleichung 5)
wird also bei D=460mm: qr 0,25v
3.2 Auflösungsvermögen Gesamt
q?@ s
3438 · 0,0074 · 60 0,763v
2000 3.3 Nötige Schrittauflösung
Für die RA-Achse gilt: w3Z@? 360°o100 x
3,6°ox
Bei eine Schrittauflösung von 1,8°ocagLyy 1 xiz]z>o
200 cagLyyd
Y3Z[?3N?
Y3Z[?3N?
Ergäbe sich bei direkten Antrieb (xY3Z[?3N? xiz]z> x( für die RA-Achse:
w3Z@? 3,6°
1x
·
0,018°ocagLyy
x 200 cagLyyd
Die nötige Schrittauslösung bei einem Auflösungsvermögen von 0,75‘ beträgt jedoch:
{{
| · 10} °
q?@ 0,75{ 4,16| · 10}~ 2,083
D.h. wir benötigen eine Untersetzung von L?]>I?2? /lk
kl
m,m^
_,m
~·^m n, ; p
4 Auswahl des Motors
Damit das Schneckenrad sich 1mal pro Tag (vereinfacht 24h) um die eigene Achse dreht, muss sich
die Schnecke 100mal drehen. Bei direktem Antrieb wäre die benötige Drehzahl der Schnecke:
MY 100
x
x
x
|
4,16| 0,0694
a
LM
Bei einem 100:1-Getriebe sollte der Motor, um mit ca. 100facher (0[\?@]>?2] % adg)
Nachführgeschwindigkeit verfahren zu können (das entspricht in etwa 25°oLM 0,42°oK) eine
Drehzahl von
x
· 100 · 100 n;
M@ · 0[\?@]>?2] · L 0,0694
LM
:
bei dem berechneten ungünstigen Lastmoment durch das gewählte Übersetzungsverhältnis
#?>Z
oL
0,3 o100 0,003 ?]>I?2?
von 0,003 Nm erreichen.
5 Auswahl des Getriebes
z.B:
http://www.metrius.de/getriebe-2umin-p-838126.html (125:1) 32€
http://www.metrius.de/getriebe-5umin-p-838127.html (50:1) 32€