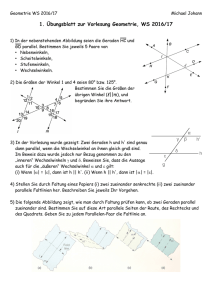
Geometrie
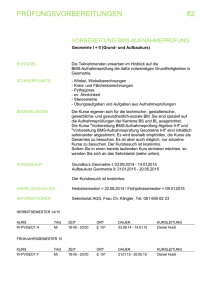
Werbung

Geometrie https://www.mi.fu-berlin.de/kvv/course.htm?sid=22&iid=2&cid=9923 — vorläufiges Skript (ohne Garantie) — — Ich bin sehr dankbar für Hinweise auf Fehler, Korrekturen, Ergänzungen, Verbesserungsvorschläge, etc. — — Version vom 26. August 2011 — Prof. Günter M. Ziegler Fachbereich Mathematik und Informatik FU Berlin, 14195 Berlin Tel. 030 314-25730 [email protected] http://page.mi.fu-berlin.de/gmziegler/ FU Berlin, Sommer 2011 Diese Vorlesung für das Bachelorstudium soll als natürliche Fortsetzung von Lineare Algebra I und II Fundamente legen für Vorlesungen/Zyklen wie Diskrete Geometrie, Algebraische Geometrie und Differenzialgeometrie. Sie behandelt grundlegende Modelle der Geometrie, insbesondere – euklidische, affine, sphärische, projektive und hyperbolische Geometrie, Möbiusgeometrie, Polarität und Dualität – Strukturgruppen, Messen (Längen, Winkel, Volumina), explizite Berechnungen und – Anwendungen, Beispiele sowie Illustrationsthemen. Dabei werden weitere Bezüge hergestellt, zum Beispiel zur Funktionentheorie und zur Numerik. Literatur [1] David A. Brannan, Matthew F. Esplen, and Jeremy J. Gray. Geometry. Cambridge University Press, Cambridge, 1999. [2] Gerd Fischer. Lernbuch Lineare Algebra und Analytische Geometrie. Vieweg+Teubner, Wiesbaden, 2011. [3] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School, 2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/ geometry1_ws07.pdf. 1 Geometrie — FU Berlin Sommersemester 2011 — Skript, Version: 26. August 2011 — Günter M. Ziegler Vorbemerkungen Dies ist nicht nur meine erste Vorlesung an der FU Berlin, sondern auch meine ersten “allgemeine” Geometrie-Vorlesung. Ich will dabei meine Begeisterung für die Geometrie vermitteln, insbesondere aber Werkzeuge für die Arbeit mit geometrischen Strukturen vermitteln, die dann in ganz unterschiedliche Richtungen hilfreich sein können, insbesondere für Vorlesungszyklen wie “Diskrete Geometrie I–III” (den ich selber halten werde), Differenzialgeometrie, Algebraische Geometrie, aber auch für Vorlesungen wie Geometry Processing und Algorithmische Geometrie. Hier kommt ein grober Zeitplan, den wir schrittweise anpassen werden: 1. Euklidische Geometrie, I: Der Rn mit einem Skalarprodukt . . . . . . . . . . . . . . . . . . 12. April 2. Euklidische Geometrie, II: Hochdimensionale Effekte . . . . . . . . . . . . . . . . . . . . . . 14. April 3. Euklidische Geometrie, III: Euklidische Bewegungen . . . . . . . . . . . . . . . . . . . . . . . 19. April 4. Euklidische Geometrie, IV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21. April 5. Affine Geometrie, I: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26. April 6. Affine Geometrie, II: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28. April 7. Kegelschnitte, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Mai 8. Kegelschnitte, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Mai 9. Quadriken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10. Mai 10. Quadriken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12. Mai 11. Projektive Geometrie, I: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17. Mai 12. Projektive Geometrie, II: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19. Mai 13. Projektive Geometrie, III: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24. Mai 14. Projektive Geometrie, IV: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26. Mai 15. Projektive Geometrie, V: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31. Mai 16. “Was ist eine Geometrie” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Juni 17. “Was ist eine Geometrie” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9. Juni 18. Sphärische Geometrie, I: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14. Juni 19. Sphärische Geometrie, II: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16. Juni 20. Möbiusgeometrie, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21. Juni 21. Möbiusgeometrie, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23. Juni 22. Hyperbolische Geometrie, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28. Juni 23. Hyperbolische Geometrie, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30. Juni 24. Hyperbolische Geometrie, III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Juli 25. Hyperbolische Geometrie, IV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Juli 26. Hyperbolische Geometrie, V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12. Juli 27. Perspektiven der Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14. Juli 2 Geometrie — FU Berlin 1 1.1 1.1.1 Sommersemester 2011 — Skript, Version: 26. August 2011 — Günter M. Ziegler Euklidische Geometrie Der Rn mit einem Skalarprodukt Lineare und affine Unterräume Modell: Rn reeller Vektorraum mit Koordinatensystem Untervektorräume U ⊆ Rn der Dimension dim U , mit 0 ≤ dim U ≤ n. “Innere Beschreibung”: U = span{v1 , . . . , vr } = {λ1 v1 + · · · + λr vr : λ1 , . . . , λr ∈ R}, mit r ≥ dim U. Hier gilt r = dim U wenn {v1 , . . . , vr } eine Basis ist. Jede (geordnete) Basis liefert uns Koordinaten für U . “Äußere Beschreibung”: durch ein homogenes lineares Gleichungssystem U = {x ∈ Rn : Ax = 0}, mit A ∈ Rm×n , m ≥ n − dim U. Hier hat A den Rang n − dim U , und es gilt m = n − dim U wenn die Zeilen von A linear unabhängig sind. Affine Unterräume U ⊆ Rn der Dimension dim U , mit −1 ≤ dim U ≤ n, sind die Lösungsmengen von linearen Gleichungssystemen, wobei ∅ als affiner Unterraum der Dimension −1 betrachtet wird. “Äußere Beschreibung”: U = {x ∈ Rn : Ax = b}, mit A ∈ Rm×n , m ≥ n − dim U , b ∈ Rn durch ein lineares Gleichungssystem. Wenn b nicht im Spaltenraum von A liegt, dann ergibt dies U = ∅. Ansonsten ist b ein Punkt in U , A hat den Rang n − dim U , und es gilt m = n − dim U wenn die Zeilen von A linear unabhängig sind. “Innere Beschreibung”: U = b + span{v1 , . . . , vr }, mit r ≥ dim U . Hier gilt r = dim U wenn {v1 , . . . , vr } eine Basis ist. Jeder Basispunkt mit einer (geordneten) Basis liefert uns Koordinaten für U . Symmetrischere Alternative: baryzentrische Koordinaten U = {µ0 u0 + · · · + µr ur : µ0 , . . . , µr ∈ R, µ0 + · · · + µr = 1}, wobei u0 , . . . , ur affin erzeugen — zum Beispiel b, b + v1 , . . . , b + vr . Unter anderem haben wir als affine Unterräume: Punkte, Geraden, Ebenen (Dimension 2), . . . , Hyperebenen (Dimension n − 1). Ein affiner Unterraum hat keinen natürlichen Basispunkt. 1.1.2 Abstände P Standard-Skalarprodukt: hx, yi := ni=1 xi yi . p Norm |x| := hx, xi: Längenmessung pPn 2 Metrik d(x, y) := |x − y| = i=1 (xi − yi ) : Abstand zwischen den durch x, y bestimmten Punkten 3 Dreiecksungleichung: d(x, z) ≤ d(x, y) + d(y, z), mit Gleichheit nur wenn x, y, z in der richtigen Reihenfolge auf einer (affinen) Geraden liegen. Theorem 1.1. Im Rn gibt es n + 1 Punkte, aber keine n + 2 Punkte, die paarweise voneinander denselben Abstand haben. Beweis (für den √ ersten Teil der Aussage). Betrachte die Punktmenge e1 , . . . , en , t(e1 +· · ·+en ) (für Abstand 2). Das liefert eine quadratische Gleichung für t, mit zwei Lösungen für t. Problem. Wie viele Punkte kann es im Rn geben, zwischen denen nur zwei verschiedene Abstände auftreten? — nicht vollständig gelöst! 1.1.3 Orthogonalisierung Zwei Vektoren x, y ∈ Rn sind orthogonal, wenn hx, yi = 0 gilt. Orthogonale Projektion eines Punkts x auf eine Hyperebene H = {x ∈ Rn : ha, xi = α} für a 6= 0: der eindeutige Bildpunkt x̄ ∈ H lässt sich auf unterschiedliche Weise beschreiben/ charakterisieren, die alle äquivalent sind (Übungsaufgabe! Zeichnung!): • d(x̄, x) ist minimal für x̄ ∈ H • hx − x̄, y − x̄i = 0 für alle y ∈ H • x̄ = x + ta mit t ∈ R so dass x̄ ∈ H a • x̄ = x + α−ha,xi ha,ai x y x0 ~a Die Abbildung von x auf x̄ ist linear: x 7−→ x+ α − ha, xi a. ha, ai Vgl. Gram-Schmidt Orthogonalisierung aus der Linearen Algebra! Orthogonale Projektion auf einen affinen Unterraum: Genauso! 1.1.4 Sphären und Bälle Sphäre S n−1 := {x ∈ Rn : |x| = 1}, bzw. S(x0 , r) := {x ∈ Rn : |x − x0 | = r} für x0 ∈ Rn , r > 0. Ball B n := {x ∈ Rn : |x| ≤ 1}, bzw. B(x0 , r) := {x ∈ Rn : |x − x0 | ≤ r}. 4 1.1.5 Winkel Den Winkel ^(x, y) zwischen zwei Vektoren x, y 6= 0 definieren wir als den Abstand zwischen 1 1 x und y 0 := |y| y, aber gemessen auf der Einheitssphäre S n−1 := {x ∈ Rn : |x| = 1}. x0 := |x| Damit liegen alle Winkel im Intervall [0, π]. Man überlegt sich (Trigonometrie!), dass dann |x0 − y 0 | = 2 sin( α2 ) ist, also α = 2 sin−1 ( 12 |x0 − y 0 |). y y0 x x0 α 2 Oder man überlegt sich (Gram-Schmidt Orthogonalisierung! Zeichnung!), dass für x00 := das Dreieck 0x00 y rechtwinklig ist — und deshalb cos α = |x00 | |y| = hx,yi x hx,xi hx,yi . |x||y| y x α x 00 Das liefert hx, yi =: |x||y| cos α. Lemma 1.2 (Winkel sind additiv. Dreiecksungleichung für Winkel!). Für Vektoren x, y, z 6= 0 gilt ^(x, z) ≤ ^(x, y) + ^(y, z), mit Gleichheit nur wenn x, y, z linear abhängig sind, mit y “zwischen” x und z. Beweis. Dreiecksungleichung auf der Sphäre. 1.1.6 Volumen Volumen kann man für “geeignete” Teilmengen A ⊆ Rn unterschiedlich definieren: 5 1. elementar: Zerschneiden und Zusammensetzen (Isometrien) 2. mit Hilfe der Determinantenfunktion (für Würfel, Spate, etc.) 3. Riemann’sches Volumen: mit kleinen Würfelchen R ausschöpfen (vgl. Analysis-Vorlesung). Das führt zu dem Riemann-Integral vol(A) := A 1dx. Die Volumengleichheit z.B. von Parallelotopen, also Formeln von der Form vol{λ1 a1 + · · · + λn an : 0 ≤ λi ≤ 1} = | det(a1 , . . . , an )| folgen leicht mit Hilfe von Analysis-Methoden — aber lässt sich lässt sich Volumengleichheit von Polyedern “elementar” durch Zerlegungsgleichheit in kongruente Stücke begründen? Das war “Hilberts drittes Problem”; es wurde von Dehn negativ gelöst: Es gibt Tetraeder mit gleicher Grundfläche und gleicher Höhe, die nicht “zerlegungsgleich” sind. Siehe [1, Kap. 9] [2] . 1.2 1.2.1 Hochdimensionale Effekte Volumen von Kugel und Würfel Das Volumen der Kugel vom Radius 1 Vol(B n ) = 2πe n/2 π n/2 π n/2 ∼ ∼ n Γ( n2 + 1) ! n 2 ist für großes n (d.h. in hoher Dimension) verschwindend klein verglichen mit dem Volumen Vol([−1, 1]n ) = 2n . Daher die Zeichnung (auf Anregung von Vitaly Milman, 1998), die die Sphäre wie eine Amöbe zeigt? Wer einen zufälligen Punkt in der Einheitskugel konstruieren will, kann also nicht einfach Zufallswerte in [−1, 1]n nehmen . . . 1.2.2 Lange Diagonalen im Würfel Setzen wir 2n Bälle vom Radius 1 an die Ecken des n-Würfels [−1, 1]n , dann berühren die sich gerade. Alle Bälle sind in [−2, 2]n enthalten. Setzen wir noch einen möglichst großen Ball in den Mittelpunkt, so dass der die anderen Bälle √ gerade berührt. Radius: n − 1. Für n > 4 ist der innere Ball größer als die äußeren. Für n > 9 ragt er sogar aus dem Würfel [−2, 2]n heraus! (Siehe Matoušek [4, Chap. 13]) 1.2.3 Das Kusszahl-Problem “Kusszahl”-Problem: Für n = 3 können 12 Einheitskugeln eine gegebene Einheitskugel berühren (Ikosaeder, siehe Hausaufgabe!), aber nicht mehr (Newton-Gregory Problem). Betrachten wir die Konfiguration im vorigen Abschnitt für n = 4, dann ist ist der innere Ball eine Einheitskugel, und genauso groß wie die äußeren. Und man kann 8 weitere Bälle an die 6 Mittelpunkte ±2ei setzen, die die Eckbälle nur berühren — das gibt eine Konfiguration von 24 Kugeln vom Radius 1, die gleichzeitig die Einheitskugel berühren, ohne sich zu überlappen. Diese 24er-Konfiguration ist in verschiedenster Hinsicht außergewöhnlich; sie definiert ein 4dimensionales reguläres Polytop mit 24 Seitenflächen, die allesamt Oktaeder sind, und sie ist hochsymmetrisch. Dieses “24-Zell” wurde von Ludwig Schläfli um 1850 entdeckt, als er die regulären Polytope in Dimension n ≥ 4 klassifiziert hat. (Siehe z.B. Hilbert & Cohn-Vossen [3]) Für d = 4 ist die Zahl 24 von Berührkugeln maximal — das wurde von Musin 2008 bewiesen [5] [6]. Und man nimmt auch an, dass die Konfiguration eindeutig ist — das ist aber nicht bewiesen. Eine optimale Konfiguration kennt man auch für n = 8 und für n = 24, aber sonst für keine Dimension n ≥ 5 1.3 1.3.1 Kongruenztransformationen Translationen Translationen: Ta : Rn → Rn , x 7→ x + a. Die Translationen sind Isometrien, das heißt, d(Ta (x), Ta (y)) = d(x, y) gilt für alle x, y. Die Translationen bilden eine abelsche Gruppe, die wir mit (Rn , +) identifizieren können. 1.3.2 Orthogonale Abbildungen Proposition 1.3. Isometrien, die den Nullpunkt festhalten, sind orthogonale Abbildungen. Solche Abbildungen sind also insbesondere linear, und können also in der Form x 7→ Ax beschrieben werden, mit orthogonaler Matrix A. Beweis. Sei f : Rn → Rn Isometrie mit f (0) = 0. Dann gilt insbesondere |f (x)| = |x| für alle x, und deshalb hf (x), f (y)i = hx, yi wegen Polarisation: hx, yi = 21 (|x|2 + |y|2 − |x − y|2 ). Nun sei e1 , . . . , en eine Orthonormalbasis (ONB), zum Beispiel die Standardbasis (wir setzen ja das Standardskalarprodukt voraus). Dann gilt für jeden Vektor n X x = hx, ei iei , i=1 und deshalb, weil auch f (e1 ), . . . , f (en ) eine ONB ist, und weil f das Skalarprodukt erhält, f (x) = n n X X hf (x), f (ei )if (ei ) = hx, ei if (ei ). i=1 i=1 Daran sieht man, dass f linear ist. Lemma 1.4. Eine lineare Abbildung x 7→ Ax is genau dann orthogonal, wenn eine der folgenden äquivalenten Bedingungen gilt: 7 • • • • • sie eine Orthonormalbasis auf eine Orthonormalbasis abbildet, sie jede Orthonormalbasis auf eine Orthonormalbasis abbildet, die Spalten von A eine Orthonormalbasis bilden, At A = En , die Zeilen von A eine Orthonormalbasis bilden. Jede orthogonale Abbildung hat Determinante +1 oder −1. Die orthogonalen Abbildungen des Rn (und damit die darstellenden Matrizen) bilden eine Gruppe, die orthogonale Gruppe O(n) = {A ∈ Rn : At A = En }. Die orientierungserhaltenden orthogonalen Abbildungen bilden eine Untergruppe, die spezielle orthogonale Gruppe SO(n) = {A ∈ Rn : At A = En , det A = 1}. Die Gruppen O(n) ist nicht kommutativ für n ≥ 2, SO(n) ist nicht kommutativ für n > 2. Theorem 1.5 (Normalformsatz für orthogonale Abbildungen). Für jedes orthogonale Abbildung Rn → Rn gibt es eine Zerlegung des Rn in ein- und zweidimensionale invariante orthogonale Unterräume, so dass – auf jedem der ein-dimensionalen invarianten Unterräumen ist die Abbildung die Identität oder ihr Negatives, – auf jedem der zwei-dimensionalen invarianten Unterräumen ist die Abbildung eine Drehung um einen Winkel im Intervall ]0, π[. Äquivalent dazu: für jede orthogonale Matrix A ∈ O(n) gibt es S ∈ O(n) so dass S −1 AS eine Blockdiagonalmatrix ist S −1 AS = diag(1, . . . , 1, −1, . . . , −1, D(α1 ), . . . , D(αk )) mit Einsen, Minus-Einsen und2 × 2 Drehmatrizen zu Winkeln 0 < αi < π auf der Diagonale, cos α − sin α also D(α) = . sin α cos α Lemma 1.6. Jede orthogonale Abbildung der Determinante +1 kann stetig (innerhalb der Gruppe O(n)!) in die Identität deformiert werden. Jede orthogonale Abbildung der Determinante −1 kann stetig in die Spiegelung s1 : x 7→ x − 2x1 e1 deformiert werden. Korollar 1.7. Für n ≥ 1 hat die Gruppe O(n) ⊆ Rn×n zwei Zusammenhangskomponenten, nämlich die spezielle orthogonale Gruppe SO(n) und die Nebenklasse SO(n)s1 = {A ∈ Rn : At A = En , det A = −1}. Korollar 1.8. Jede orthogonale Abbildung des Rn kann aus höchstens n Spiegelungen an Hyperebenen durch den Nullpunkt erzeugt werden. Im Allgemeinen reichen dafür jedoch n − 1 Spiegelungen nicht aus. 8 1.3.3 Allgemeine Kongruenztransformationen Die Gruppe der Isometrien des Rn (also der “euklidischen Bewegungen” oder “Kongruenztransformationen”) enthält einerseits die Untergruppe der Translationen — die wir mit Rn identifizieren — andererseits die orthogonalen Abbildungen, also die Isometrien, die den Nullpunkt festlassen. Die Schnittmenge zwischen diesen beiden Untergruppen enthält nur die Nullabbildung (die einzige Translation, die den Nullpunkt festlässt). Jede Isometrie f : Rn → Rn kann man als “orthogonale Abbildung gefolgt von einer Translation” beschreiben, also als f : x 7→ Ax + b für A ∈ O(n) und b ∈ Rn . Dabei sind b = f (0) und damit auch A durch f eindeutig festgelegt. Theorem 1.9. Die volle Gruppe der euklidischen Bewegungen ist Eukl(n) = {f : f (x) = Ax + b für ein A ∈ O(n), b ∈ Rn }. Achtung: Trotzdem ist die Gruppe der euklidischen Bewegungen nicht einfach das Produkt Rn × O(n), weil die Translationen und die orthogonalen Abbildungen nicht kommutieren. Sie kann strukturell beschrieben werden als ein semidirektes Produkt “Rn o O(n)”, das gebildet werden kann, weil die Gruppe der orthogonalen Abbildungen O(n) als eine Gruppe von Automorphismen auf der Gruppe der Translationen (isomorph zu Rn ) wirkt. In dem semidirekten Produkt bilden die Translationen eine normale Untergruppe: Jede Konjugation einer Translation x 7→ x + a hat die Form x 7→ S −1 (((Sx + b) + a) − b) = x + S −1 a, ist also eine Translation. 1.3.4 Erzeugung durch Spiegelungen Die Spiegelung an der Hyperebene H = {x ∈ Rn : ha, xi = α} bildet x auf x + 2ta ab, wenn x 7→ x + ta die Projektion auf die Hyperebene ist: x 7−→ a. x + 2 α−ha,xi ha,ai Spiegelung in einem affinen Unterraum: Genauso! Korollar 1.10. Jede Kongruenztransformation im Rn kann als Produkt von höchstens n + 1 Spiegelungen an Hyperebenen dargestellt werden — von denen alle, bis auf möglicherweise die letzte, Hyperebenen durch den Nullpunkt sind. Im Allgemeinen reichen dafür jedoch n Spiegelungen nicht aus. Beweis. Dazu stellen wir die Kongruenztransformation als “orthogonale Abbildung gefolgt von einer Spiegelung” dar. 9 1.3.5 Hauptsatz der Euklidischen Geometrie Theorem 1.11. Sind p0 , . . . , pm und p00 , . . . , p0m Punkte im Rn mit d(pi , pj ) = d(p0i , p0j ) für alle i, j (0 ≤ i < j ≤ m), so gibt es eine euklidische Transformation f : Rn → Rn , x 7→ Ax + b, mit A ∈ O(n) und b ∈ Rn , so dass f (pi ) = p0i für alle i gilt, 0 ≤ i ≤ m. Wenn die Punkte pi nicht alle auf einer Hyperebene liegen (was insbesondere m ≥ n erzwingt), dann ist diese euklidische Transformation eindeutig bestimmt. Beweis. Nach einer Verschiebung um den Vektor b := p00 − p0 dürfen wir annehmen, dass p0 = p00 = 0 ist. Nun wenden wir das Gram–Schmidt-Verfahren auf die Vektoren p0 , . . . , pm an, und erhalten daraus eine Orthogonalbasis pb0 , . . . , pbn . Achtung: wenn die Vektoren pi nicht linear unabhängig sind, können dabei einige Vektoren durchaus Null ergeben – diese werden dann nicht weiter berücksichtigt. Wenn die Vektoren nicht aufspannen, wird am Ende zu einer Orthogonalbasis ergänzt – in diesem Fall ist die Basis pb0 , . . . , pbn nicht eindeutig durch die Folge p0 , . . . , pm bestimmt. Genauso erzeugen wir mit dem Gram–Schmidt-Verfahren aus der Folge p00 , . . . , p0m von Vektoren eine Orthogonalbasis pb0 , . . . , pbn . Dabei läuft das Gram–Schmidt-Verfahren ganz analog ab, mit denselben Koeffizienten, weil nämlich die Koeffizienten aus Skalarprodukten zwischen den Vektoren entstehen, und diese (Polarisierung!) durch die Normen der Vektoren und ihrer Differenzen bestimmt sind, und diese Daten sind nach Annahme für die Folgen p0 , . . . , pm und p00 , . . . , p0m gleich. Nun definiert die Vorschrift f : pbj 7→ pb0j eine orthogonale Abbildung f (weil sie eine ONB auf eine ONB abbildet). Die Tatsache, dass die pbj mit denselben Koeffizienten aus den pi gewonnen werden, wie die pb0j aus den p0i ergibt insbesondere, dass auch die pi mit denselben Koeffizienten aus den pbj dargestellt werden können wie die p0i aus den pb0j . Also bildet f auch pi auf p0i ab. In dem Fall, dass keine Basisergänzung nötig ist, die pi also den Rn aufspannen, ist die Abbildung f sogar eindeutig. Korollar 1.12 (Kongruenzsatz “SSS”). Wenn zwei Dreiecke im Rn gleiche Seitenlängen haben, dann sind sie kongruent. 1.3.6 Freiheitsgrade Bemerkung 1.13 ( Freiheitsgrade“ — Dimension der Gruppe der Kongruenztransformationen). ” Jede Kongruenztransformation bildet (0, e1 , . . . , en ) auf orthogonalen Rahmen ab. Für den ersten Punkt liegt das Bild beliebig im Rn , der zweite liegt auf einer (n−1)-dimensionalen Sphäre, der nächste auf einer (n − 2)-Sphäre, usw. Daher ist die Anzahl der Freiheitsgrade“ insgesamt ” n + (n − 1) + · · · + 1 = 21 (n + 1)n. Alternative Rechnung: wir müssen die Bilder von n + 1 Punkten festlegen, das sind (n + 1)n Variable, aber es gibt n+1 Bedingungen/paarweise Distanzen, also ist die Anzahl der Frei2 n+1 heitsgrade: (n + 1)n − 2 = 21 (n + 1)n. Technisch (Analysis III): die Gruppe ist 1eine Lie-Gruppe, also insbesondere eine Mannigfaltigkeit der Dimension n2 + n = n+1 = 2 n(n + 1). 2 10 Literatur [1] Martin Aigner and Günter M. Ziegler. Das BUCH der Beweise. Springer-Verlag, Heidelberg Berlin, third edition, 2009. [2] V. G. Boltianskii. Hilbert’s Third Problem. V. H. Winston & Sons (Halsted Press, John Wiley & Sons), Washington DC, 1978. [3] David Hilbert and Stephan Cohn-Vossen. Anschauliche Geometrie. Springer-Verlag, Berlin Heidelberg, 1932. Second edition 1996. English translation: Geometry and the Imagination, Chelsea Publ., 1952. [4] Jiřı́ Matoušek. Lectures on Discrete Geometry, volume 212 of Graduate Texts in Math. SpringerVerlag, New York, 2002. [5] Oleg R. Musin. The kissing number in four dimensions. Annals of Mathematics, 168:1–32, 2008. [6] Florian Pfender and Günter M. Ziegler. Kissing numbers, sphere packings, and some unexpected proofs. Notices of the AMS, 51(8):873–883, September 2004. 11 2 2.1 Affine Geometrie Affine Transformationen Definition 2.1. Eine Abbildung f : Rn → Rm heißt affin, wenn f (λx + (1 − λ)y) = λf (x) + (1 − λ)f (y) gilt für alle x, y ∈ Rn und λ ∈ R. Sie heißt Affinität, wenn sie bijektiv ist (was insbesondere m = n impliziert). Eine affine Abbildung ist also eine Abbildung, die Geraden auf Geraden abbildet, und auf den Geraden Teilungsverhältnisse erhält (z.B. Mittelpunkte). Bemerkung 2.2. Die erste Bedingung reicht nicht allein, wie man z.B. am Fall m = n = 1 sieht. (Man kann aber zeigen, dass für n ≥ 2 sogar jede Abbildung f : Rn → Rn , die Geraden auf Geraden abbildet, eine Affinität ist — für n ≥ 2 und über den reellen Zahlen braucht man also die Voraussetzung über Teilungsverhältnisse nicht.) Siehe Fischer [2, Abschnitt 1.3]. Proposition 2.3. f : Rn → Rm ist genau dann affin, wenn es eine Matrix A ∈ Rm×n und einen Vektor b ∈ Rm gibt mit f (x) = Ax + b für alle x ∈ Rn . f : Rn → Rn ist genau dann eine Affinität, wenn es eine Matrix A ∈ GL(n, R) = {A ∈ Rn×n : det A 6= 0} und einen Vektor b ∈ Rm gibt mit f (x) = Ax + b für alle x ∈ Rn . Lemma 2.4. Wenn f affin ist, dann gilt f (λ1 x1 + · · · + λk xk ) = λ1 f (x1 ) + · · · + λk f (xk ) für k ≥ 1, x1 , . . . , xk ∈ Rn , λ1 , . . . , λk ∈ R mit λ1 + · · · + λk = 1. Beweis. Für k = 1 ist das trivial. Für k > 1 können nicht alle λi gleich 1 sein, also können wir annehmen, dass λ1 6= 1 ist, und dann argumentieren wir mit Induktion: f (λ1 x1 + · · · + λk xk ) = f (λ1 x1 + (1 − λ1 )( λ2 λ2 x2 · · · + xk )). 1 − λ1 1 − λ1 Ende 26.4.2011 Korollar 2.5. Die Affinitäten f : Rn → Rm bilden eine Gruppe, nämlich Affin(n) = {f : f (x) = Ax + b für ein A ∈ GL(n), b ∈ Rn } ∼ = Rn o GL(n). Beweis. Die Umkehrabbildung zu f (x) = Ax+b ist f −1 (x) = A−1 (x−b) = A−1 x+(−A−1 b). Man kann sich überlegen, dass auch Affin(n) zwei Zusammenhangskomponenten hat, die durch det A > 0 bzw. det A < 0 gegeben sind. 12 2.1.1 Hauptsatz der Affinen Geometrie Definition 2.6 (affin unabhängig, affine Basis). Punkte p0 , . . . , pk ∈ Rn heißen affin unabhängig, wenn es keine nichttriviale affine Abhängigkeit λ0 p0 + · · · + λk pk = 0, λ0 + · · · + λk = 0 gibt; äquivalent, wenn es für jeden der Punkte eine affine Hyperebene gibt, die den Punkt nicht enhält, alle anderen aber schon. Jede maximale Menge von affin unabhängigen Punkten bildet eine affine Basis. (Eine affine Basis ist also einfach eine Menge von n + 1 affin unabhängigen Punkten.) k + 1 affin unabhängige Punkte bilden die Ecken eines k-dimensionalen Simplex (Punkt für k = 0, Strecke für k = 1, Dreieck für k = 2, Tetraeder für k = 3). Definition 2.7 (Affiner Spann, affine Hülle). Für p0 , . . . , pk ∈ Rn heißt aff(p0 , . . . , pk ) := {λ0 p0 + · · · + λk pk : λ0 + · · · + λk = 1} der affine Spann oder die affine Hülle von p0 , . . . , pk . Lemma 2.8 (Baryzentrische Koordinaten). Sind p0 , . . . , pk ∈ Rn affin unabhängig, so hat jeder Punkt x ∈ aff(p0 , . . . , pk ) eine eindeutige Darstellung in der Form x = λ0 p0 + · · · + λk pk mit λ0 + · · · + λk = 1. Die Koeffizienten λ0 , . . . , λk heißen dann die baryzentrischen Koordinaten von x. Insbesondere 1 (p0 + · · · + pk ) das Baryzentrum oder der Schwerpunkt der Punkte heißt der Punkt x0 = k+1 p0 , . . . , p k . Theorem 2.9 (Hauptsatz der Affinen Geometrie). Seien p0 , . . . , pm und p00 , . . . , p0m zwei Folgen von Punkten im Rn . Dann gibt es eine Affinität f : Rn → Rn , x 7→ Ax + b, mit A ∈ GL(n) und b ∈ Rn mit f (pi ) = p0i , 0 ≤ i ≤ k, dann und nur dann, wenn zwischen den Punkten pi bzw. p0i dieselben affinen Abhängigkeiten (mit denselben Koeffizienten) bestehen. Die Abbildung existiert also insbesondere, wenn die Punktfolgen p0 , . . . , pm und p00 , . . . , p0m affin unabhängig sind. Wenn die Punktfolgen affine Basen sind (also insbesondere k = n), dann ist die Affinität eindeutig bestimmt. Beweis. Klar? Jede Affinität • bildet Geraden auf Geraden ab, • bildet parallele Geraden auf parallele Geraden ab, • erhält Strecken-/Teilungsverhältnisse entlang von Geraden, • erhält Volumenverhältnisse. 13 Welche dieser Eigenschaften reicht zur Charakterisierung von Affinitäten? Proposition 2.10. f : Rn → Rn ist genau dann eine Affinität, wenn sie Volumenverhältnisse erhält, wenn es also eine Konstante α ∈ R, α 6= 0, gibt mit det(f (p1 ) − f (p0 ), . . . , f (pn ) − f (p0 )) = α det(p1 − p0 , . . . , pn − p0 ) für alle p0 , . . . , pn ∈ Rn . Beweis. Offenbar erhält jede Affinität f (x) = Ax + b Volumenverhältnisse, mit α = det A. Wenn umgekehrt f Volumenverhältnisse erhält, so bildet f Punkte auf einer Geraden auf Punkte auf einer Geraden ab — andernfalls findet man eine “affine Basis”, die auf eine “affine NichtBasis” abgebildet wird. Korollar 2.11. Die volumenerhaltenden Abbildungen Rn → Rn sind genau die Affinitäten der Determinante 1, bilden also die Gruppe {f : f (x) = Ax + b für ein A ∈ SL(n), b ∈ Rn } ∼ = Rn o SL(n), wobei SL(n) die spezielle lineare Gruppe SL(n) = {A ∈ Rn×n : det A = 1 bezeichnet. Bemerkung 2.12 ( Freiheitsgrade“ — Dimension der Gruppe der affinen Transformationen). ” Eine Affinität ist durch die Bilder von n + 1 Punkten einer affinen Basis festgelegt, und diese können (generisch) frei gewählt werden. Also ist die Anzahl der Freiheitsgrade und die Dimension der Gruppe Affin(n) gleich (n + 1)n. In der Tat ist {(A, b) : det A 6= 0} eine offene Teilmenge des Rn×(n+1) . 2.2 Anwendungen Proposition 2.13 (Die Seitenhalbierenden schneiden sich.). In jedem Dreieck schneiden sich die Verbindungslinien von den Ecken zu den gegenüberliegenden Seitenmittelpunkten. Beweis. Die Behauptung ist invariant unter affinen Transformationen, also können wir annehmen, dass wir es mit einem gleichseitigen Dreieck zu tun haben. C0 C Mb0 Mb S S0 Ma0 Ma A0 A Mc B 14 Mc0 B0 Entsprechend höherdimensional: Baryzentren. Proposition 2.14 (Satz von Ceva). In jedem Dreieck schneiden sich die Verbindungslinien von den Ecken A, B, C zu Punkten A0 , B 0 , C 0 auf den gegenüberliegenden Seiten dann und nur dann, wenn AC 0 BA0 CB 0 = 1. C 0 B A0 C B 0 A Beweis. Invariant unter affinen Transformationen, also können wir annehmen, dass wir es mit einem gleichschenkligen rechtwinkligen Dreieck A = (0, 0), B = (1, 0), C = (0, 1) zu tun haben. Für dieses Dreieck rechnet man die Behauptung dann leicht(er) nach. Merke: Koordinatentransformationen ausnutzen! Dto: “Der Satz von Menelaus” über die Schnittpunkte einer Geraden mit den (verlängerten) Kanten eines Dreiecks. Quelle: Brannan et al. [1, Sect. 2.4] Literatur [1] David A. Brannan, Matthew F. Esplen, and Jeremy J. Gray. Geometry. Cambridge University Press, Cambridge, 1999. [2] Gerd Fischer. Analytische Geometrie. Vieweg, Wiesbaden, 2001. 7. Auflage. 15 3 3.1 Kegelschnitte und Quadriken Kegelschnitte und ihre Eigenschaften Vorbemerkung: Quadriken (Lösungsmengen von quadratischen Gleichungen in n Variablen) werden für n = 2 oft mit Kegelschnitten “identifiziert”. Aussagen wie “Für n = 2 nennen wir die Quadriken Kegelschnitte” verdecken aber ◦ die naheliegende Definition von Kegelschnitten als “Schnitten eines (Doppel-)Kegels mit einer Ebene” ◦ die Tatsache, dass zum Beispiel die leere Menge zwar eine Quadrik ist, aber kein Schnitt eines Kegels, ◦ die Frage, wann zwei Quadriken bzw. zwei Kegelschnitte gleich/äquivalent sind. Im Folgenden werden wir ◦ Kegelschnitte als Schnitte eines (Doppel-)Kegels mit einer Ebene definieren, und (bis auf Kongruenz-/Isometrie) klassifizieren ◦ Quadriken als Lösungsmengen von quadratischen Gleichungen definieren, durch Matrizen darstellen, bis auf Isometrie klassifizieren, und auch bis auf affine Transformationen klassifizieren (jeweils mit “Normalform”) ◦ ableiten, dass für n = 2 die Kegelschnitte (bis auf Isometrie) genau die nicht-leeren Quadriken sind (Ausnahme: zwei parallele Geraden sind auch eine Quadrik, aber kein Kegelschnitt). 3.1.1 Kegelschnitte Unser Augangspunkt ist der Kreiskegel C = {(x1 , x2 , x3 ) ∈ R3 : x21 + x22 = x23 } (der ja eigentlich ein Doppelkegel ist). Wir schreiben ihn für das Folgende einfacher als C = {(x, y, z) ∈ R3 : x2 + y 2 = z 2 }. Schneidet man C mit einer Ebene E, so erhält man zum Beispiel ◦ für Schnitt mit z = c: einen Kreis, bzw. für c = 0 einen Punkt, ◦ für Schnitt mit y = c: eine Hyperbel, bzw. für c = 0 zwei sich schneidende Geraden, ◦ für Schnitt mit z = y + c: Parabel, Doppelgerade Definition 3.1. Eine Teilmenge Q ⊂ R2 ist ein Kegelschnitt, wenn es eine Isometrie zwischen R2 und einer Ebene E ⊂ R3 gibt, unter der Q auf C ∩ E abgebildet wird, also auf den Schnitt der Ebene E mit dem Doppelkreiskegel C = {(x, y, z) ∈ R3 : x2 + y 2 = z 2 } Wir betrachten also jetzt einen Schnitt von C mit einer beliebigen Ebene E, wobei wir die Schnitte bis auf Isometrie klassifizieren. Wir können dabei die Symmetrien des Kreiskegels ausnutzen, also annehmen, dass wir eine Ebene der Form z = c, c ≥ 0 betrachten, die wir dann um einen Winkel ϕ, 0 ≤ ϕ ≤ π/2 (also um höchstens 90 Grad) um die x-Achse “kippen”. Wir überlegen uns, dass die Isometrie, die Punkte der Ebene z = 0 auf eine solche “allgemeine” Ebene gegeben ist, wie folgt abbildet: x x 0 x 1 0 0 x x y 7−→ y + 0 = y 7−→ 0 cos ϕ − sin ϕ y = cos ϕ y − sin ϕ c . 0 0 c c 0 sin ϕ cos ϕ0 c sin ϕ y + cos ϕ c 16 Die Bildpunkte dieser Transformation müssen also die Gleichung des Kreiskegels erfüllen: x2 + (cos ϕ y − sin ϕ c)2 = (sin ϕ y + cos ϕ c)2 . Vereinfachung dieser Gleichung, unter Verwendung von cos2 ϕ−sin2 ϕ = cos 2ϕ und 2 cos ϕ sin ϕ = cos 2ϕ ergibt x2 + (cos 2ϕ)y 2 − 2c sin 2ϕ y = (cos 2ϕ)c2 Fall 1. Für ϕ = π/4, also cos 2ϕ = 0 und sin 2ϕ = 1 ergibt dies x2 − 2c y = 0 1 2 x , und für c = 0 eine Gerade (genauer eine Doppelgerade) also für c > 0 eine Parabel y = 2c 2 x = 0. Nehmen wir also jetzt ϕ 6= π/4 an, so können wir durch cos 2ϕ teilen und quadratisch ergänzen, und erhalten x2 + (y − 2c tan 2ϕ)2 = (1 + tan2 2ϕ)c2 . cos 2ϕ Wenn wir jetzt y − 2c tan 2φ einfach durch y ersetzen, so entspricht das einer Translation, also einer Isometrie, und wir erhalten x2 c2 + y2 = . cos 2ϕ cos2 2ϕ Fall 2. Für 0 ≤ ϕ < π/4 ist cos 2ϕ > 0, dann ist das für c > 0 die Gleichung einer Ellipse, die 2 man mit a2 := cosc22ϕ und b2 := cosc22ϕ auf die Normalform x2 y 2 + 2 = 1 a2 b mit a, b > 0 bringen kann; für c = 0 erhält man entsprechend mit a2 := cos 2ϕ und b2 := cos2 2ϕ x2 y 2 + 2 = 0 a2 b mit a, b > 0 also den Punkt (0, 0). Fall 3. Für π/4 < ϕ ≤ π/2 ist cos 2ϕ < 0, dann ist das für c > 0 die Gleichung einer Hyperbel, 2 die man mit a2 := − cosc22ϕ und b2 := cosc22ϕ auf die Normalform − x2 y 2 + 2 = 1 a2 b mit a, b > 0 bringen kann; für c = 0 erhält man entsprechend mit a2 := −cos 2ϕ und b2 := cos2 2ϕ − x2 y 2 + 2 = 0 a2 b mit a, b > 0 also zwei sich schneidende Geraden bx = ±ay. Damit haben wir im Wesentlichen den folgenden Satz bewiesen — dessen Zusatz man auch leicht verifiziert. 17 Theorem 3.2. Die Schnitte des Kreiskegels C = {(x, y, z) ∈ R3 : x2 + y 2 = z 2 } mit einer Ebene im R3 sind isometrisch zu genau einer der folgenden sechs ebenen Mengen: 2 2 1. eine Ellipse xa2 + yb2 = 1 mit a, b > 0, 2. eine Parabel y = ax2 mit a > 0, 2 2 3. eine Hyperbel − xa2 + yb2 = 1 mit a, b > 0, 2 2 4. zwei sich schneidende Geraden, − xa2 + yb2 = 0 mit a, b > 0, 5. eine Gerade, oder 6. ein Punkt. Umgekehrt tritt jede dieser Figuren mit den gegebenen Parametern auch als Schnitt auf. 3.1.2 Geometrische Eigenschaften 2 1. Ellipse. Q = { xa2 + y2 b2 = 1}, mit a ≥ b > 0 . . . ist affines Bild eines Kreises, . . . hat zwei aufeinander senkrecht stehende Symmetrieachsen, x = 0 bzw. y = 0, die Hauptachsen; vergleiche dazu die Zeichnung aus Dürers berühmter “Underweysung der Messung, mit dem Zirckel und Richtscheyt” [2]: 18 . . . hat vier Scheitelpunkte (±a, 0) und (0, ±b) auf den Hauptachsen (für a = b sind alle Geraden durch das Zentrum (0, 0) Symmetrieachsen, und alle Punkte auf der Ellipse Scheitelpunkte), √ . . . hat Brennpunkte F = (c, 0) und F 0 = (−c, 0), für c := a2 − b2 (hier verwenden wir a ≥ b; für a = b fallen die Brennpunkte zusammen), . . . Konstruktion der Brennpunkte mit dem Zirkel! (Kreise mit Mittelpunkt (±a, 0) durch (0, ±b)). Proposition 3.3 (Drei Eigenschaften/Charakterisierungen der Brennpunkte). • [“Gärtner-Konstruktion”] Für alle Punkte P = (x0 , y0 ) auf der Ellipse gilt d(F, P ) + d(P, F 0 ) = 2a. • [Reflexionseigenschaft] Lichtstrahlen, die von einem Brennpunkt ausgehen, und in der Ellipse reflektiert werden, gehen durch den anderen Brennpunkt; das heißt, die Strecken F P und F 0 P haben denselben Winkel zur Tangente an die Ellipse in P . y b −a −c 0 P c ax −b Ende 3.5.2011 • [Dandelin’sche Kugeln] 3-dimensionale geometrische Konstruktion 19 Lemma 3.4 (Tangentengleichung). Die Tangente an die Ellipse (x0 , y0 ) ist gegeben durch xx0 yy0 + 2 = 1. a2 b x2 a2 + y2 b2 = 1 im Punkt P = Beweis. Leicht und elegant rechnet man nach, dass das wirklich eine Gerade ist, auf der P liegt, und dass P der einzige Schnittpunkt in T ∩ Q ist. Zwei affine“ Sätze über Ellipsen: ” Proposition 3.5. [1, Sect. 2.2.3] Die Mittelpunkte der Schnitte einer Ellipse mit einer Parallelenschar liegen auf einem Durchmesser. Proposition 3.6. [1, Sect. 2.2.3] Zu jedem Durchmesser ` einer Ellipse gibt es einen anderen Durchmesser `0 so dass: • Die Mittelpunkte der Sehnen, die zu ` parallel sind, liegen auf `0 , • die Mittelpunkte der Sehnen, die zu `0 parallel sind, liegen auf `. 2 2. Hyperbel. Q = { xa2 − y2 b2 = 1}, mit a, b > 0 . . . ist affines Bild der Standardhyperbel xy = 1, . . . hat zwei aufeinander senkrecht stehende Symmetrieachsen, x = 0 bzw. y = 0, die Hauptachsen, . . . hat zwei Scheitelpunkte (±a, 0) auf den Hauptachsen, . . . hat Brennpunkte F = (c, 0) und F 0 = (−c, 0), für c := 2 . . . hat zwei Asymptoten, die durch xa2 − sich die Hyperbeläste annähern, y2 b2 √ a2 + b 2 , = 0 gegeben sind, also bx ± ay = 0, und denen . . . Konstruktion der Brennpunkte mit dem Zirkel! (Verwende Kreise mit Mittelpunkt (±a, 0) durch (0, ±b)) Proposition 3.7 (Zwei Charakterisierungen der Brennpunkte). • [“Gärtner-Konstruktion”] Für alle Punkte P = (x0 , y0 ) auf der Hyperbel gilt |d(F, P ) − d(P, F 0 )| = 2a. • [Reflexionseigenschaft] Lichtstrahlen, die auf einen Brennpunkt zielen, aber in der Hyperbel reflektiert werden, zielen dann auf den anderen Brennpunkt; das heißt, die Strecken F P und F 0 P haben denselben Winkel zur Tangente an die Hyperbel in P . 20 y P −c −a 0 a c x −b Lemma 3.8 (Tangentengleichung). Die Tangente an die Hyperbel (x0 , y0 ) ist gegeben durch xx0 yy0 − 2 = 1. a2 b x2 a2 − y2 b2 = 1 im Punkt P = Lemma 3.9. Haben eine Hyperbel und eine Ellipse dieselben Brennpunkte, so haben sie 4 Schnittpunkte, und sie schneiden sich in diesen senkrecht. 3. Parabel. Q = {y = ax2 }, mit a > 0 . . . ist affines Bild der Standardparabel y = x2 , . . . hat nur eine Symmetrieachse, y = 0. . . . der Scheitelpunkt ist (0, 0), . . . der Brennpunkt ist F = (0, c), für c := 1 , 4a . . . die Leitgerade ist L = {y = −c}. Proposition 3.10 (Zwei Charakterisierungen der Brennpunkte). • [Parabolspiegel!] Für alle Punkte P = (x0 , y0 ) auf der Parabel gilt d(F, P ) = d(P, L). • [Reflexionseigenschaft] Lichtstrahlen, die vom Brennpunkt ausgehen, und in der Parabel reflektiert werden, sind danach parallel zur Symmetrieachse. 21 y Q P c x −c Lemma 3.11 (Tangentengleichung). Die Tangente an die Parabel y = ax2 im Punkt P = (x0 , y0 ) ist gegeben durch y = ax0 (2x − x0 ). Anwendung/Illustration: “Fortune’s Sweep” zur Konstruktion von ebenen Voronoi-Diagrammen. 22 Selbst ausprobieren: (Quelle/Siehe: Applet auf http://www.diku.dk/hjemmesider/studerende/duff/Fortune/) Ende 5.5.2011 23 3.2 Quadriken Definition 3.12. Eine Quadrik ist die Lösungsmenge Q ⊂ Rn eines Polynoms vom Grad höchstens 2 in n Variablen. Man spricht dabei von quadratischen Gleichungen, und Q wird auch als Nullstellenmenge der Gleichung q(x1 , . . . , xn ) ∈ R[x1 , . . . , xn ] bezeichnet. Prinzipiell lässt die obige Definition auch Polynome vom Grad höchstens 1 zu, also lineare Polynome. Dieser Fall ist nicht besonders interessant: dann ist Q entweder leer, oder eine Hyperebene im Rn , oder der gesamte Rn . Wir lassen diese drei trivialen“ Fälle als Quadriken in ” der Definition zu, ignorieren sie im Folgenden aber meist. If Fall n = 1 ist Q also die Lösung einer quadratischen Gleichung, also besteht Q aus ein oder aus zwei Punkten oder ist leer (oder ist ganz R). Für n = 2 können wir die quadratische Gleichung wie folgt schreiben: Q = {(x, y) ∈ R2 : ax2 + bxy + cy 2 + dx + ey + f = 0} für a, b, c, d, e, f ∈ R. Wenn (a, b, c) = (0, 0, 0), so erhalten wir eine lineare Gleichung, die Lösungsmenge ist dann Gerade oder leer oder der R2 . Diesen Fall könnten wir also ausschließen . . . Bessere Notation, mehrere Möglichkeiten: n x o 1 Q = ∈ R2 : a11 x1 2 + 2a12 x1 x2 + a22 x2 2 + 2a01 x1 + 2a02 x2 + a00 = 0 x2 a00 a01 a02 1 o n x 1 = ∈ R2 : (1, x1 , x2 ) a10 a11 a12 x1 x2 a20 a21 a22 x2 für aij ∈ R2 (0 ≤ i, j ≤ 2). Entsprechend können wir n-dimensionale Quadriken wie folgt schreiben: X Q = {x ∈ Rn : aij xi xj = 0, mit x0 := 0} 0≤i,j≤n a00 a0 t 1 = {x ∈ R : (1, x ) a0 A x t c b 1 = {x ∈ Rn : (1, xt ) b A x n t = {x ∈ Rn : xt Ax + 2bt x + c = 0} für A ∈ Rn×n symmetrisch, a0 ∈ Rn , a00 ∈ R bzw. A ∈ Rn×n symmetrisch, b ∈ Rn , c ∈ R. 3.2.1 Euklidische Klassifikation der Quadriken Im Folgenden werden Koordinatentransformationen angewandt, um die Quadriken auf besonders einfache, und eindeutig bestimmte, Gleichungen zu bringen, also auf Normalform“. Dabei ” wenden wir in dieser Reihenfolge an: 24 (1) orthogonale Transformationen (2) Translationen (3) Skalierung Dabei verwenden wir, dass die Kombination (1) von (2) eine beliebige Isometrie ergibt. Diese Kombination muss uns also die Klassifiktation der Quadriken bis auf Isometrie liefern. Lassen wir zusätzlich Skalierung zu, so ergibt das beliebige affine Transformationen, und damit die entsprechende Klassifikation der Quadriken. Fundamentales Hilfsmittel aus der Linearen Algebra ist der Spekralsatz für selbstadjungierte Endomorphismen/symmetrische Matrizen: Theorem 3.13 (Spekralsatz). Jeder Endomorphismus auf einem endlich-dimensionalen reellen Vektorraum mit Skalarprodukt hat eine Orthonormalbasis aus Eigenvektoren. Äquivalent: Für jede symmetrische Matrix A ∈ Rn×n (also mit At = A) gibt es eine orthogonale Matrix S ∈ Rn×n (also mit S t = S −1 ) so dass S t AS = Λ eine Diagonalmatrix ist. Der Beweis für die Äquivalenz der beiden Formulierungen wird hier nicht gegeben. Die Diagonaleinträge von Λ sind die Eigenwerte von A. Die Spalten von S bilden eine Orthonormalbasis aus Eigenvektoren von A, wobei für die zweite Formulierung das Standardskalarprodukt auf dem Rn angenommen wird (was wegen Gram–Schmidt zulässig ist). Damit ist der Spektralsatz konstruktiv: wir wissen, wie man S konstruieren kann. Sei nun die Quadrik Q ⊂ Rn gegeben als Menge der Nullstellen von c bt 1 t q(x) = (1, x ) b A x mit A = At ∈ Rn×n , b ∈ Rn , c ∈ R. (1) Orthogonale Transformation. Wir konstruieren S ∈ O(n) so, dass λ1 ... λk λk+1 t . .. S AS = λ k+` 0 . .. 0 mit λ1 , . . . , λk > 0 und λk+1 , . . . , λk+` < 0. (Zum Beispiel kann man die nichtverschwindenden Eigenwerte nach Größe ordnen, und erhält damit λ1 ≥ · · · ≥ λk > 0 > λk+1 ≥ · · · ≥ λk+` .) Damit können wir das quadratische Polynom q(x) wie folgt faktorisieren: 1 0 1 0 c bt 1 0 1 0 1 t q(x) = (1, x ) 0 S 0 St b A 0 S 0 S −1 x c b̄t 1 t = (1, x̄ ) x̄ b̄ Λ mit x̄ := S −1 x, b̄ := S t b und Λ := S t AS. 25 Hier sind also die ersten k ≥ 0 Spalten von S orthonormale Eigenvektoren zu positiven Eigenwerten von A, die nächsten ` ≥ 0 Spalten von S sind orthonormale Eigenvektoren zu negativen Eigenwerten von A, und die letzten n − k − ` ≥ 0 Spalten von S sind eine Orthonormalbasis für den Eigenraum zum Eigenwert 0, also zum Kern von A. Dabei dürfen wir im Fall, dass das mehr als eine Spalte ist, also für n − k − ` ≥ 2, annehmen, alle diese Spalten außer möglicherweise der ersten, senkrecht auf b stehen, dass also die letzten n − k − ` − 1 Koordinaten von b̄ = S t b verschwinden. Damit liegt das Polynom q(x) jetzt in der Form q(x) = λ1 x21 + · · · + λk+` xk+` 2 + 2b̄1 x1 + · · · + 2b̄k+`+1 xk+`+1 vor. Dieses kann man nun durch eine quadratische Ergänzung vereinfachen, oder — äquivalent dazu (!) — durch eine geeignete Translation. (2) Translation. Eine Translation x 7→ x + u (also eine affine Abbildung) lässt sich in den “homogenen” Koordinaten (mit zusätzlicher Koordinate x0 = 1) als lineare Abbildung darstellen: 1 1 1 0t 1 7→ = . x u+x u E x wobei E die Einheitsmatrix darstellt (hier: E ∈ Rn×n ). Die Inverse der Translation um u ist die Translation um −u. Daher faktorisieren wir weiter q(x) als 1 1 0 1 0t 1 0t 1 0 c bt 1 0 1 ut 1 −ut 1 0 x 0 S −1 −u E u E 0 S b A 0 St 0 E 0 E 0 S t u + ut Λu b̄t + ut Λ c + 2 b̄ 1 t ¯) = (1, x̄ ¯ b̄ + Λu Λ x̄ (1, xt ) mit x̄¯ = S −1 x − u. Nun setzen wir r := rank A = rank Λ = k + ` und c bt c b̄t c + 2b̄t u + ut Λu b̄t + ut Λ r := rank = rank = rank . b A b̄ Λ b̄ + Λu Λ 0 Dabei ist offenbar 0 ≤ r ≤ r0 ≤ r + 2, r ≤ n und r0 ≤ n + 1. Fall 1: Liegt b̄ im Spaltenraum von A, also rank(b̄ Λ) = rank(Λ) = k + `, so gibt es ein u mit b̄ + Λu = 0 (nämlich u := −Λ∗ b̄, wobei Λ∗ die Diagonaleinträge λi −1 hat), und wir berechnen c + 2b̄t u ∗ ut Λu = c − b̄t Λ∗ b̄ =: c̄¯. In diesem Fall ist r0 = r wenn c̄¯ = 0 ist, und sonst r0 = r + 1. Fall 2: Liegt b̄ nicht im Spaltenraum von A, so hat q(x) also einen linearen Term, und wir können c durch eine weitere Translation wegtransformieren. Insgesamt ergibt das den folgenden Normalformsatz: Theorem 3.14 (Euklidische Hauptachsentransformation). Jede Quadrik im Rn (mit Ausnahme der linearen Quadriken, also der Hyperebenen, sowie Q = ∅ und Q = Rn ) lässt sich durch eine Isometrie auf eine der folgenden drei Typen von Normalformen bringen, für k ≥ 1, ` ≥ 0, k + ` ≤ n, und 0 < a1 ≤ · · · ≤ ak , ak+1 ≥ · · · ≥ ak+` > 0: x2k+` x21 x2k x2k+1 (1a) 2 + · · · + 2 − 2 − · · · − 2 = 1, a1 ak ak+1 ak 26 (1b) (2) x2k+` x21 x2k x21 + · · · + − − · · · − = 0 a21 a2k a2k+1 a2k mit k ≥ ` und a1 = 1, x2k+` x21 x2k x21 + · · · + − − · · · − = 2xk+`+1 , a21 a2k a2k+1 a2k mit k ≥ `, k + ` < n. Hier entspricht (1a) dem Fall r0 = r + 1, (1b) ist der Fall r0 = r, und (2) ist der Fall r0 = r + 2. Dass man jede Quadrik auf eine dieser Normalformen transformieren kann, haben wir im Wesentlichen bewiesen; dafür setzt man λi =: a12 für i ≤ k und λi =: − a12 für k < i ≤ k + `. Die i i Bedingung k ≥ 1 schließt die linearen Quadriken aus. Eigentlich würde man den Normalformsatz so formulieren, dass die Normalformen alle unterschiedlich sind, und Quadriken mit unterschiedlicher Normalform auch nicht ineinander transformierbar. Das ist für die oben angegebene Formulierung nicht ganz richtig, aus zwei Gründen: 1. die Quadriken der Form (1b) haben im Fall k = ` zusätzliche Äquivalenzen, und 2. für lineare Quadriken (insbesondere Hyperebenen) ist das Quadrat einer definierenden Gleichung wieder eine definierende Gleichung, und diese tauchen in den obigen Gleichungen eben doch noch auf. Mit etwas mehr Mühe/Geduld lässt sich die obige Beschreibung aber zu so einer “eindeutigen Normalform” verfeinern. Um dies zu formulieren, kann/müsste man insbesondere im Fall (1b) lexikographische Ordnung etc. verwenden. Um sie zu beweisen, argumentiert man entweder geometrisch, oder algebraisch — muss dann zeigen, dass die Gleichung durch die Quadrik im Wesentlichen (bis auf Vielfache) eindeutig festgelegt ist — wieder bis auf die offensichtliche Ausnahmen im Fall von linearen Quadriken (leer, Hyperebene, ganzer Rn ). Wir geben die Klassifikation der Quadriken für n = 2 tabellarisch an: Typ (1a) (1a) (1a) (1b) (1b) (1b) (2) r 1 2 2 1 2 2 1 r0 2 3 3 1 2 2 3 k 1 2 1 1 1 2 1 ` typische Gleichung Beschreibung 0 x21 = 1 zwei parallele Geraden 0 x21 + x22 = 1 Ellipse 1 x21 − x22 = 1 Hyperbel 0 x21 = 0 (Doppel-)Gerade 1 x21 − x22 = 0 Geradenpaar mit Schnittpunkt 0 x21 + x22 = 0 Punkt (Kreis vom Radius 0) 0 x21 = 2x2 Parabel Wir diskutieren also nochmal die Aussage die Kegelschnitte sind genau die nicht-leeren ebe” nen Quadriken“ . . . und stellen fest, dass es drei Ausnahmen gibt, nämlich die Ebene, die leere Menge, und zwei parallele Geraden — alle drei Ausnahmen sind Quadriken, aber keine Kegelschnitte. 27 Genauso bekommen wir die nichtlinearen Quadriken im R3 als Typ (1a) (1a) (1a) (1a) (1a) (1a) (1b) (1b) (1b) (1b) (1b) (1b) (1b) (1b) r 1 2 2 3 3 3 1 2 2 3 3 1 2 2 r0 2 3 3 4 4 4 1 2 2 3 3 3 4 4 k 1 2 1 3 2 1 1 2 1 3 2 1 2 1 ` typische Gleichung Beschreibung 0 x21 = 1 paralleles Ebenenpaar 0 x21 + x22 = 1 Zylinder über einer Ellipse 1 x21 − x22 = 1 Zylinder über einer Hyperbel 2 0 x1 + x22 + x23 = 1 Ellipsoid 1 x21 + x22 − x23 = 1 einschaliges Hyperboloid 2 x21 − x22 − x23 = 1 zweischaliges Hyperboloid 0 x21 = 0 Doppelebene 0 x21 + x22 = 0 Gerade 1 x21 − x22 = 0 Ebenenpaar mit Schnittgerade 0 x21 + x22 + x23 = 0 Punkt 1 x21 + x22 − x23 = 0 Kreiskegel 0 x21 = 2x2 Zylinder über einer Parabel 0 x21 + x22 = 2x3 elliptisches Paraboloid 1 x21 − x22 = 2x3 hyperbolisches Paraboloid Bemerkung 3.15. Die interessantesten Fälle sind offenbar die mit r0 = n + 1; alle anderen Quadriken erhält man als Zylinder oder Kegel über niedrigdimensionaleren Quadriken. Bemerkung 3.16. Unter den Quadriken im R3 mit r0 = n + 1 (nichtlinear, nicht Zylinder oder Kegel (im Fall (1b))) sind • einschaliges Hyperboloid und • hyperbolisches Paraboloid Regelflächen, bei denen es durch jeden Punkt der Quadrik zwei Geraden gibt, die in der Quadrik verlaufen. Unter den Regelflächen wird insbesondere auf das einschalige Hyperboloid hingewiesen — siehe die “Mae West”-Skulptur in München [3]. 3.2.2 Affine Klassifikation der Quadriken Wenn wir nur auf Klassifikation der Quadriken bis auf affine Transformation interessiert sind, dann dürfen wir insbesondere Koordinatentransformationen der Form xaii 7→ xi durchführen, und bekommen damit aus dem euklidischen den affinen Normalformsatz: Theorem 3.17 (Affine Hauptachsentransformation). Jede nicht-lineare Quadrik im Rn lässt sich durch eine affine Transformation auf eine der folgenden drei Typen von Normalformen bringen, für k ≥ 1, ` ≥ 0, k + ` ≤ n: (1a) x21 + · · · + x2k − x21 − · · · − x2k+` = 1, (1b) x21 + · · · + x2k − x21 − · · · − x2k+` = 0 mit k ≥ `, (2) x21 + · · · + x2k − x21 − · · · − x2k+` = 2xk+`+1 mit k + ` < n. 28 Dass man jede Quadrik auf eine dieser Normalformen transformieren kann, folgt aus dem euklidischen Fall mit einer zusätzlichen Substitution xaii 7→ xi . Quadriken mit diesen Normalformen sind alle unterschiedlich sind und nicht durch affine Transformationen ineinander transformierbar — wieder mit den offensichtlichen“ Ausnahmen, bei ” den linearen Quadriken. Um das zu beweisen, argumentiert man wieder entweder geometrisch, oder algebraisch. Literatur [1] David A. Brannan, Matthew F. Esplen, and Jeremy J. Gray. Geometry. Cambridge University Press, Cambridge, 1999. [2] Albrecht Dürer. Unterweysung der Messung mit dem Zyrkel und Rychtscheydt. Nürnberg, 1525 (English translation with commentary by W. L. Strauss: “The Painter’s Manual: Instructions for Measuring with Compass and Ruler”, New York 1977); http://de.wikisource.org/ wiki/Underweysung_der_Messung,_mit_dem_Zirckel_und_Richtscheyt, _in_Linien,_Ebenen_unnd_gantzen_corporen/Erstes_Buch. [3] Günter M. Ziegler. Mathematik im Alltag: Der Name der Rose. Mitteilungen der DMV, 19(1):42–44, 2011. 29 4 Projektive Geometrie 4.1 Motivation • Affine Geometrie: Punkte im Unendlichen“, so dass sich zwei Geraden in einer Ebe” ne immer in einem Punkt schneiden; es gibt keine Parallen; perfekte Dualität zwischen Punkten und Hyperebenen • Gebrochen-lineare“ Transformationen können Geometrie vereinfachen, aber schieben ” Hyperebenen nach Unendlich“ ” • Was passiert, wenn man bei Kegelschnitten die Ebene stetig verändert? Ellipse → Parabel → Hyperbel? • Zentralprojektion: Streckenverhältnisse ändern sich, aber “Doppelverhältnisse” bleiben gleich. Was haben wir davon? Geometrie mit • perfekter Dualität • vielen Transformationen, also vielen Möglichkeiten zur Vereinfachung • Matrix-Beschreibung für Transformationen Der n-dimensionale projektive Raum 4.2 4.2.1 Definition; mehrere Modelle Definition 4.1 (Der n-dimensionale projektive Raum). Der n-dimensionale projektive Raum RPn ist die Menge RPn := {L ⊆ Rn+1 : L ist ein 1-dimensionaler linearer Unterraum}. aller 1-dimensionalen Unterräume im Vektorraum Rn+1 . Für −1 ≤ k ≤ n sind die k-dimensionalen projektiven Unterräume die Teilmengen P (U ) := {L ∈ RPn : L ⊆ U } für (k + 1)-dimensionale Unterräume U ⊆ Rn+1 . Achtung: die projektive Dimension von P (U ) ist also gegeben durch dim P (U ) = dim U − 1. Bemerkung 4.2 (Mehrere Modelle). Den Projektiven Raum RPn können wir äquivalent betrachten als (1) Raum der eindimensionalen Unterräume im Rn+1 , wie hier definiert, (2) die Menge der Vektoren in Rn+1 \ {0}, modulo Identifikation von Vielfachen, (3) die Sphäre S n ⊂ Rn+1 modulo Identifizierung gegenüberliegender Punkte, oder (4) affiner Raum Rn plus “Punkte im Unendlichen”. Wichtig sind die Übersetzungen zwischen diesen Modellen, wobei wir identifizieren: (1) einen eindimensionalen Unterräume im Rn+1 mit (2) den nicht-verschwindenden Vektoren in den Unterraum, bzw. (3) den (beiden) Vektoren der Länge 1 in dem Unterraum, 30 (4) dem Vektor in dem Unterraum mit x0 -Koordinate 1, bzw. sonst einer Richtung (d.h. einem Element von RPn−1 ). Lemma 4.3. Zwei verschiedene Geraden G1 , G2 ⊂ RP2 schneiden sich in genau einem Punkt. Proposition 4.4 (Plücker-Koordinaten). Sei U ein k-dimensionaler linearer Unterraum U ⊆ Rn . Sei A ∈ Rn×k eine Matrix, deren Spalten eine Basis von U bilden. Der Plücker-Vektor von n A ist der Vektor xA ∈ R(k ) der k × k-Unterdeterminanten von A. Dieser ist bis auf Vielfache n eindeutig bestimmt, ergibt also einen eindeutigen Punkt im RP(k )−1 . Dieser Punkt bestimmt n den linearen Unterraum eindeutig (wobei nicht jeder Punkt in RP(k )−1 einen Unterraum entspricht). Beweis. Die Matrix A ist bis auf invertierbare Spaltenoperationen eindeutig bestimmt. Also ist der Vektor der Unterdeterminanten bis auf ein gemeinsames Vielfaches eindeutig bestimmt. Die Rekonstruktion des Unterraums aus dem gegebenen Plücker-Vektor überlegt man sich am Beispiel. 4.3 Projektive Transformationen Definition 4.5 (Projektive Transformationen; Projektivitäten). Eine Abbildung f : RPm → RPn heißt projektiv, wenn sie durch eine lineare Abbildung fˆ : Rm+1 → Rn+1 , x 7→ Ax induziert wird, für A ∈ R(n+1)×(m+1) . (Insbesondere muss dann x 7→ Ax injektiv sein, A also vollen Rang m haben, insbesondere also m ≤ n gelten.) Eine Projektivität ist eine projektive Abbildung f : RPn → RPn . (Projektivitäten sind also die bijektiven projektiven Abbildungen.) Lemma 4.6. Die projektiven Transformationen RPn → RPn eingeschränkt auf Rn ⊂ RPn sind genau die gebrochen-linearen“ Transformationen x 7→ cAx+b t x+δ für nichtsinguläre Matrix ” t δ c . b A Beachte: die gebrochen-lineare Abbildung ist für c 6= 0 nur außerhalb der Hyperebene H := {x : ct + δ = 0} definiert. Interpretation: diese bildet H nach Unendlich“ ab. ” Beweis. t 1 1 δ ct 1 c x+δ 7−→ = ∼ Ax+b . x b A x Ax + b ct x+δ Proposition 4.7 (Invarianten). Projektive Transformationen (i) bilden projektive Unterräume auf projektive Unterräume (derselben Dimension!) ab, (ii) bilden Quadriken auf Quadriken ab. Definition 4.8 (Projektive Basis). Eine projektive Basis des RPn besteht aus n + 2 Punkten p0 , p1 , . . . , pn+1 , von denen keine n + 1 auf einer Hyperebene (also in einem Unterraum der Dimension n − 1) liegen. 31 Proposition 4.9 (Hauptsatz der Projektiven Geometrie). Seien (p0 , . . . , pn+1 ) und (p00 , . . . , p0n+1 ) zwei (geordnete) projektive Basen des Rn , so gibt es genau eine projektive Abbildung f : RPn → RPn , die pi auf p0i abbildet (0 ≤ i ≤ n + 1). Beweis. Seien p̂i bzw. p̂0i entsprechende Vektoren im Rn+1 . Dann gibt es lineare Abhängigkeiten λ0 p̂0 + · · · + λn+1 p̂n+1 und λ00 p̂00 + · · · + λ0n+1 p̂0n+1 , die beide bis auf Vielfache eindeutig sind, und deren Koeffizienten nicht Null sind. Weiter sind (λ0 p̂0 , . . . , λn p̂n ) und (λ00 p̂00 , . . . , λ0n p̂0n ) Basen des Rn+1 , so dass λi p̂i 7→ λ0i p̂0i eine eindeutige lineare Abbildung definiert. Die linearen Abhängigkeiten garantieren dann, dass λn+1 p̂n+1 7→ λ0n+1 p̂0n+1 . Ende 19.5.2011 Korollar 4.10. Die projektiven Transformationen auf dem RPn bilden eine Gruppe. Diese ist gegeben durch lineare Transformationen auf dem Rn+1 modulo Dilatationen, also PGL(n, R) = GL(n + 1, R)/R∗ Die Dimension dieser Gruppe, also auch die Anzahl der Freiheitsgrade, die wir für eine projektive Transformation haben, ist (n + 1)2 − 1 = (n − 2)n. Beispiel 4.11. In der Ebene, kann man mit projektiven Transformationen jedes Dreieck auf jedes Dreieck abbilden, und jedes Viereck auf ein beliebiges Viereck (z.B. ein Einheitsquadrat), aber nicht jedes Fünfeck auf ein beliebiges (z.B. das regelmäßige) Fünfeck. Korollar 4.12 (Projektives Koordinatensystem). Die Vektoren e0 , e1 , . . . , en , e0 + · · · + en ∈ Rn+1 induzieren eine geordnete projektive Basis im RPn . Ist nun (p0 , . . . , pn+1 ) eine beliebige geordnete Basis des RPn , so gibt es eine eindeutige Projektivität nach Hauptsatz 4.9. Diese induziert Koordinaten (1 : 0 : 0 : · · · : 0) für p0 , (0 : 1 : 0 : · · · : 0) für p1 , .. . (0 : 0 : 0 : · · · : 1) für pn , (1 : 1 : 1 : · · · : 1) für pn+1 , wobei die Notation (x0 : x1 : x2 : · · · : xn ) betont, dass diese Vektoren von “Koordinaten” nur bis auf Vielfache definiert sind. Mit diesen projektiven Koordinaten kann man rechnen. So entsprechen die Koordinatenvektoren mit xn 6= 0 (ohne Einschränkung der Allgemeinheit: xn = 1) genau den Punkten im affinen Raum Rn ⊆ RPn , während die Koordinatenvektoren mit xn = 0 genau den Punkten “im Unendlichen” entsprechen. Punkte, die auf einer Hyperebene liegen, erfüllen eine homogene lineare Gleichung, usw. 32 4.4 Das Doppelverhältnis Definition 4.13 (Doppelverhältnis). Seien a, b, c, d ∈ RPn vier Punkte im RPn , die auf einer Geraden liegen, mit a 6= b. Dann können wir ĉ = αâ + β b̂, dˆ = γâ + δ b̂ schreiben. Das Doppelverhältnis ist dann [a, b; c, d] = βγ β/α = ∈ R ∪ {∞}. δ/γ αδ Das Doppelverhältnis [a, b; c, d] ist = ∞ für d = a = 0 für d = b = 1 für d = c Lemma 4.14. Das Doppelverhältnis ist wohl-definiert. Beweis. Für den Beweis wählen wir â, b̂, ĉ, dˆ ∈ Rn+1 \ {0}, und beobachten, dass sich das Doppelverhältnis nicht verändert, wenn wir die Vektoren â, b̂, ĉ, dˆ durch Vielfache ersetzen. Affine Teilungsverhältnisse sind Doppelverhältnisse: Liegen b, c, d auf einer affinen Geraden, a “im Unendlichen” auf der Geraden, mit dˆ = (1 − λ)ĉ + λb̂, so können wir â = ĉ − b̂ setzen, also ĉ = â + b̂ und dˆ = λâ + b̂, und das ergibt [a, b; c, d] = λ. Kurz also: [∞, b; c, (1 − λ)c + λb] = λ. Bemerkung 4.15. Wir können das Doppelverhältnis immer dann definieren, wenn die vier Punkte a, b, c, d kollinear sind, und mindestens drei von ihnen verschieden. Falls a = b ist, setzen wir dafür [a, b; c, d] = [c, d; a, b]. Theorem 4.16 (Invarianten). Projektive Transformationen erhalten Doppelverhältnisse. Sind also unter a, b, c, d ∈ RPm mindestens drei verschiedene Punkte, und ist f : RPm → RPn , so gilt [a, b; c, d] = [f (a), f (b); f (c), f (d)]. Beweis. Wir stellen a, b, c, d dar durch â, b̂, ĉ, dˆ ∈ Rm+1 , und f durch A ∈ R(n+1)×(m+1) . Gilt ĉ = αâ + β b̂, dˆ = γâ + δ b̂, so folgt Aĉ = αAâ + βAb̂, Adˆ = γAâ + δAb̂, und damit ergeben f (a), f (b), f (c), f (d) dieselben Parameter α, β, γ, δ und damit auch dasselbe Doppelverhältnis. Im Fall a = b argumentiert man separat. Proposition 4.17. Seien a, b, c, d ∈ Rn mit [a, b; c, d] = λ. Dann gilt (1) [a, b; c, d] = [b, a; d, c] = [c, d; a, b] = [d, c; b, a] = λ, (2) [a, b; d, c] = λ1 , [b, a; c, d] = 1/λ, (3) [a, c; b, d] = 1 − λ (4) und damit sind alle anderen Werte des Doppelverhältnisses einer Permutation der vier Punkte festgelegt; dabei können nur 6 verschiedene Werte auftreten, nämlich λ, λ1 , 1 − λ, 1 λ 1 − λ1 , 1−λ und λ−1 . 33 Beweis. Wegen Theorem 4.16 genügt es, dies für n = 1 zu beweisen. (1) und (4) folgen aus (2) und (3). Dabei ist (2) ziemlich offensichtlich, während (3) auf eine polynomiale Identität zwischen Determinanten hinausläuft, eine “3-Term Grassmann-Plücker-Identität”. Proposition 4.18 (Zentralprojektionen). Sind a, b, c, d und A, B, C, D jeweils kollineare Punkte, so dass sich die Geraden aA, bB, cC, dD schneiden (bzw. so dass es einen Punkt o gibt, der nicht auf den beiden Geraden abcd und ABCD liegt und oaA, obB, ocC, odD kollinear sind), so gilt [a, b, c, d] = [A, B, C, D]. Beweis. Wegen Theorem 4.16 genügt es, dies für n = 2 zu beweisen. Man konstruiert leicht eine projektive Transformation (“Zentralprojektion”), die o festhält und a auf A und b auf B abbildet, und so weiter: Dafür arbeiten wir wieder im Rn+1 , ergänzen dort ô, â, b̂ zu einer Basis, und legen die lineare Abbildung Rn+1 → Rn+1 dadurch fest, dass wir ô auf sich selbst abbilden und â 7→ Â, b̂ 7→ B̂, und die weiteren Basisvektoren (für n > 2) wieder auf sich selbst. Die lineare Abbildung induziert eine projektive Abbildung mit o 7→ o, a 7→ A und b 7→ B. Diese erhält Kollinearitäten, also wird c auf C und d auf D abgebildet. Und dann können wir Theorem 4.16 anwenden. Projektive Abbildungen erhalten Doppelverhältnisse. Es gilt aber auch eine Umkehrung: Theorem 4.19. Jede Abbildung f : RPm → RPn , kollineare Punkte auf kollineare Punkte abbildet (also Geraden auf Geraden abbildet), und Doppelverhältnisse erhält, ist eine projektive Abbildung. Bemerkung: für n ≥ 2 braucht man die Bedingung über Doppelverhältnisse nicht, dann muss man für den Beweis aber signifikant härter arbeiten. 4.5 4.5.1 Projektive Inzidenzgeometrie Schnitt und Verbindung U, V ⊂ RPn projektive Unterräume, dann ist U ∧ V := U ∩ V wieder projektiver Unterraum. Dieser ist auch der größte Unterraum, der sowohl in U als auch in V enthalten ist. In dieser Charakterisierung wird er auch als Meet von U und V bezeichnet und als U ∧ V notiert. Aber U ∪ V ist üblicherweise kein projektiver Unterraum. Definition 4.20 (Verbindung). Die Verbindung (oder auch der Join) U ∨V von zwei projektiven Unterräumen U, V ⊂ RPn ist der Schnitt aller projektiven Unterräume, die U ∪ V enthalten. Proposition 4.21 (Dimensionsformel: Modulare Gleichung). Für beliebige projektive Unterräume U, V ⊂ RPn gilt dim U + dim V = dim(U ∧ V ) + dim(U ∨ V ). Beweis. Dies folgt sofort aus der Dimensionsformel für lineare Unterräume Û , V̂ ⊆ Rn+1 für lineare Unterräume, mit dim P (Û ) = dim U − 1 für P (Û ) = U usw. Korollar 4.22. Gilt dim U + dim V ≥ n für U, V ⊆ RPn , so folgt U ∩ V 6= ∅. Korollar 4.23. Sei H ⊂ RPn eine Hyperebene und p ∈ RPn \ H. Dann schneidet jede Gerade durch p die Hyperebene H in einem einzigen Punkt. 34 4.5.2 Dualität Theorem 4.24. Für jedes n ≥ 0 gibt es eine Abbildung, die jedem projektiven Unterraum von U ⊆ Rn einen projektiven Unterraum U ∗ ⊆ RPn zuordnet mit • dim U ∗ = n − 1 − dim U , • (U ∗ )∗ , • U ⊆ V ⇔ V ∗ ⊆ U ∗, • U ∧ U ∗ = ∅, U ∨ U ∗ = RPn . Die Abbildung U 7→ U ∗ heißt auch Dualitätsabbildung. Sie bildet insbesondere Punkte auf Hyperebenen ab, und umgekehrt. Beweis. Für U = P (Û ) setze U ∗ := P (Û ⊥ ). Ende 26.5.2011 Damit übersetzt sich jedes Inzidenztheorem in ein duales Inzidenztheorem. Beispiele: (i) Zwei verschiedene Geraden im RP2 schneiden sich in genau einem Punkt ←→ Zwei verschiedene Punkte im RP2 liegen auf genau einer Gerade n 2 (ii) n Geraden in allgemeiner Lage im RP bestimmen 2 Schnittpunkte ←→ n Punkte in allgemeiner Lage im RP2 liegen auf n2 Verbindungsgeraden (iii) n Punkte in der projektiven Ebene, nicht alle auf einer Geraden, bestimmen immer eine Verbindungsgerade, die genau zwei der Punkte enthält ←→ n Geraden in der projektiven Ebene, nicht alle durch einen Punkt, bestimmen immer einen Schnittpunkt, der auf genau zwei Geraden liegt (das ist der Satz von Sylvester–Gallai, siehe [1, Kap. 10]) (iv) Drei Ebenen im RP3 haben immer einen gemeinsamen Punkt ←→ Drei Punkte im RP3 liegen immer auf einer Ebene. (v) etc. 4.5.3 Pappus und Desargues Theorem 4.25 (Satz von Pappus). Sind A, B, C Punkte auf einer Geraden G und A0 , B 0 , C 0 Punkte auf einer Geraden G0 , und ist γ der Schnittpunkt von AB 0 mit A0 B, β der Schnittpunkt von AC 0 mit A0 C, α der Schnittpunkt von BC 0 mit B 0 C, so sind α, β, γ kollinear. Beweis. Nach projektiver Transformation (!) dürfen wir annehmen, dass αγ die Gerade im Unendlichen ist. Schneiden sich G und G0 in der affinen Ebene, so betrachtet man die affinen Streckungen ϕ : A 7→ B und ψ : B 7→ C mit Zentrum G ∩ G0 . Affine Streckungen erhalten Parallelität, also gilt ϕ : B 0 7→ A0 und ψ : C 0 7→ B. Also ψ ◦ ϕ : A 7→ C, ϕ ◦ ψ : C 0 7→ A0 . Es gilt aber ψ ◦ ϕ = ϕ ◦ ψ. Sind G und G0 parallel, so argumentiert man separat. Beobachtung: Kommutativität spielt eine entscheidende Rolle im Beweis. (In der Tat ist der Satz von Pappus für projektive Geometrie über einem Schiefkörper nicht richtig.) Theorem 4.26 (Satz von Desargues). Dreiecke ABC und A0 B 0 C 0 und sind perspektivisch (also die Verbindungsgeraden entsprechender Ecken AA0 , BB 0 , CC 0 konkurrent) dann und nur dann 35 wenn die Schnittpunkte α = BC ∩ B 0 C 0 β = AC ∩ A0 C 0 γ = AB ∩ A0 B 0 der entsprechenden Seiten kollinear sind. Beweis. Für “⇐=”: Nach projektiver Transformation liegen α, β, γ auf der Geraden im Unendlichen. Also ist ABkA0 B 0 , ACkA0 C 0 und BCkB 0 C 0 . Damit sind die Dreiecke ABC und A0 B 0 C 0 ähnlich, ihr Zentrum kann durch Schnitt von Geraden ausgerechnet werden. Dabei verwendet man das “Lemma von Thales”, wonach parallele Geraden auf unterschiedlichen Geraden dieselben Teilungsverhältnisse induzieren — was man nachrechnen kann. Für “=⇒”: Dualität! Beobachtung: Arithmetik spielt eine entscheidende Rolle im Beweis. (In der Tat ist der Satz von Desargues für “synthetische” projektive Ebenen nicht richtig.) Es gibt einen 3D-Beweis für den Satz von Desargues – aber in der Tat lässt sich jede “synthetische” projektive Raum der Dimension n ≥ 3 über einem Schiefkörper koordinatisieren. Bemerkung 4.27. Vorsicht bei der Formulierung mit degenerierten Versionen! Vergleiche Richter-Gebert [4, Example 1.1] Bemerkung 4.28. Es gibt vielfältige Verallgemeinerungen: So kann man im Satz von Pappus die Vereinigung der beiden Geraden G ∪ G0 durch einen beliebigen Kegelschnitt ersetzen! 4.6 Quadriken Theorem 4.29 (Projektive Hauptachsentransformation). Jede Quadrik im Rn (mit Ausnahme der linearen Quadriken, also der Hyperebenen, sowie Q = ∅ und Q = Rn ) lässt sich durch eine projektive Transformation auf eine Normalform der Form 1 + x21 + · · · + x2k − x2k+1 − · · · − x2k+` = 0, mit k + 1 ≥ ` ≥ 1, k + ` ≤ n bringen. In projektiven Koordinaten: Q = {(x0 : x1 : · · · : xn ) ∈ RPn : x20 + · · · + x2k − x2k+1 − · · · − x2k+` = 0} mit k + 1 ≥ ` ≥ 1, k + ` ≤ n. Beweis. Wir schreiben Q als c bt 1 Q = {x ∈ R : (1, x ) b A x n t b 1 = {x ∈ R : (1, x )A x n t b ∈ R(n+1)×(n+1) symmetrisch. für A ∈ Rn×n symmetrisch, b ∈ Rn , c ∈ R, bzw. A b symmetrisch ist, gibt es eine orthogonale Matrix Sb ∈ O(n + 1) so dass Sbt A bSb diagonal Weil A ist, also gleich diag(λ0 , λ1 , . . . , λk , −λk+1 , . . . , −λk+` , 0, . . . , 0) mit λi > 0, und dann eine √ b ∈ R(n+1)×(n+1) mit Diagonaleinträgen 1/ λi für 0 ≤ i ≤ k + `, so dass Diagonalmatrix D b Sbt A bSbD b = diag(1, . . . , 1, −1, . . . , −1, 0, . . . , 0). D 36 Die Tatsache, dass bei dieser Koordinatentransformation k und ` eindeutig bestimmt sind, folgert man aus Sylvester’scher Trägheitssatz [2, S. 186] [3, S. 362]: k + 1 ist nämlich die Dimenbx positiv definit ist, sion des größten Unterraums von Rn+1 , auf dem die quadratische Form x bt Ab und genauso für ` und negativ definit. b durch −A b ersetzt. Die Bedingung k + 1 ≥ ` stellt man her, indem man ggf. A Literatur [1] Martin Aigner and Günter M. Ziegler. Das BUCH der Beweise. Springer-Verlag, Heidelberg Berlin, third edition, 2009. [2] Gerd Fischer. Analytische Geometrie. Vieweg, Wiesbaden, 2001. 7. Auflage. [3] Gerd Fischer. Lernbuch Lineare Algebra und Analytische Geometrie. Vieweg+Teubner, Wiesbaden, 2011. [4] Jürgen Richter-Gebert. Mechanical theorem proving in projective geometry. Annals of Mathematics and Artificial Intelligence, 13:139–172, 1995. 37 5 5.1 Was ist (eine) Geometrie? Axiomatische Beschreibungen von Geometrie Nach Euklid ca. 300 vor Christus [3, 5] und Hilbert 1899 [7]; siehe auch Artmann [1], Hartshorne [6]). So beschreibt Hilbert in den “Grundlagen der Geometrie” ein System von Axiomen für eine Menge von Elementen, die “Punkte” heißen, mit Teilmengen, die “Geraden” heißen, so dass ein Satz von Axiomen erfüllt ist: • 8 Axiome der Verknüpfung (Inzidenz) • 4 Axiome der Anordnung • 5 Axiome der Kongruenz • ein Parallelenaxiom • 2 Axiome der Stetigkeit. Das Hilbert’sche Axiomensystem findet man beispielsweise zusammengefasst unter http://de.wikipedia.org/wiki/Hilberts_Axiomensystem_der_euklidischen_Geometrie Mühsame Arbeit ergibt dann, dass die Axiome unabhängig voneinander sind, widerspruchsfrei sind (unter der Annahme, dass die elementare Arithmetik widerspruchsfrei ist), und vollständig: dass damit die Geometrie in R2 und R3 eindeutig beschrieben ist. Problem: es gibt auch viele sehr unsymmetrische, unnatürliche etc. Systeme, die Axiomensysteme für Geometrie erfüllen können. Die Axiome sehen teilweise sehr willkürlich aus. Es stellt sich heraus, dass projektive Geometrie einfacher und konziser beschrieben werden kann (nach Veblen & Young 1905). Definition 5.1. Eine projektive Geometrie ist ein Paar P = (P, L), wobei die Elemente von P Punkte und die Elemente von L Geraden heißen, mit L ⊆ 2L (die Geraden sind Mengen von Punkten), mit Axiom 1 Durch zwei verschiedene Punkte gibt es genau eine Gerade, Axiom 2 Sind A, B, C ∈ P verschiedene Punkte und schneidet ` ∈ L die Geraden AB und BC in unterschiedlichen Punkten, dann schneidet sie auch BC. Axiom 3 Jede Gerade enthält mindestens 3 Punkte Theorem 5.2 (Veblen & Young). Gilt in einer projektiven Geometrie der Satz von Desargues, so ist sie als projektiver Raum über einem Schiefkörper darstellbar. Gilt in einer projektiven Geometrie der Satz von Pappus, so ist sie sogar als projektiver Raum über einem Körper darstellbar. (Nach Hessenberg 1905 impliziert der Satz von Pappus den von Desargues.) Fügt man Axiome der Ordnung und Stetigkeit hinzu, dann kann man weiter auch den RPn charakterisieren. 5.2 Kleins Erlanger Programm In seiner Antrittsvorlesung in Erlangen (1872) hat Felix Klein eine andere Sichtweise auf Geometrie propagiert: als eine Menge von Elementen, die “Punkte” heißen, mit einer transitiven 38 Gruppenaktion, die zeigt, wie der Raum von jedem Punkt aus gleich aussieht. Eigenschaften der Geometrie sind dann Invarianten der Gruppenaktion, wie z.B. Geraden, Unterräume, etc. Wir versuchen die Idee von Klein formal zu fassen. Definition 5.3. Eine Geometrie ist eine Menge X von Elementen, die Punkte heißen, mit Wirkung einer Gruppe G, die transitiv und treu auf X wirkt. (Transformationsgruppe: jedem Element g ∈ G entspricht eine Bijektion ϕg : X → X, so dass ϕe die Identität ist, und ϕg ◦ ϕh (x) = ϕg (ϕh (x)) gilt: Die Wirkung ist transitiv, wenn es für beliebige x, y ∈ X ein g ∈ G gibt mit ϕ(x) = y. Die Wirkung ist treu, wenn nur das neutrale Element e ∈ G als Identität wirkt.) Aufgabe der Geometrie (als Wissenschaft) ist dann das Studium der Eigenschaften/Strukturen, die unter der Transformationsgruppe invariant sind (also erhalten bleiben). Definition 5.4. Eine Teilgeometrie einer Geometrie (X, G) ist gegeben durch eine Teilmenge X 0 ⊆ X und eine Untergruppe G0 ⊆ G, die X 0 erhält (also ϕg0 (x0 ) ∈ X 0 für x0 ∈ X 0 und g 0 ∈ G0 ), so dass sich jede Transformation g 0 ∈ G0 eindeutig auf X fortsetzt, es also keine unterschiedlichen Gruppenelemente in G gibt, die auf X 0 dieselbe Wirkung zeigen. In diesem Fall heißt (X, G) auch eine Erweiterung der Geometrie (X 0 , G0 ) Beispiele: Geometrie euklidisch Raum Rn Transf.gruppe Rn o O(n) Invarianten Kollinearität (⇒ Unterräume); Abstände (⇒ Winkel, Volumina) n n Ähnlichkeit R R o (O(n) × R>0 ) Kollinearität; Abstandsverhältnisse (⇒ Winkel, Volumenverhältnisse) n n affin R R o GL(n, R) Kollinearität; Teilungsverhältnisse auf Geraden sphärisch Sn O(n + 1) Kollinearität (bzgl. Großkreisen); sphärische Abstände (⇒ Winkel, Volumina) n n elliptisch RP = S /(±) O(n + 1, R)/(±I) Kollinearität; sphärische Abstände n ∗ projektiv RP GL(n + 1, R)/R Kollinearität; Doppelverhältnisse; Quadriken Hier ist mit R∗ die multiplikative Gruppe R\{0} gemeint. Üblich sind die Bezeichnungen P O(n + 1) = O(n + 1, R)/(±I) und P GL(n + 1, R) = GL(n + 1, R)/R∗ für die Transformationsgruppen von elliptischer bzw. projektiver Geometrie. Viele dieser Geometrien sind Teilgeometrien/Erweiterungen von anderen – wobei wir einige erst noch kennenlernen werden: . elliptisch projektiv ↓ affin ↓ Ähnlichkeit ↓ euklidisch 39 & hyperbolisch 6 Sphärische und elliptische Geometrie Hier diskutieren wir ausführlicher sphärische Geometrie, also X = S n, G = O(n + 1) und dann, davon abgeleitet, elliptische Geometrie, also X = S n /(x ∼ −x) = RPn , 6.1 G = P O(n + 1) = O(n + 1)/(±I). Sphärische Zweiecke Kollineare Punkte auf der Sphäre sind Punkte, die auf einem Großkreis liegen (also auf einem Schnitt der S n mit einem 2-dimensionalen Unterraum). Definition 6.1 (Hemisphäre, Zweieck). Eine Hemisphäre auf der S n ist eine Teilmenge von der Form HN := {x ∈ S n : hx, N i ≥ 0} wobei N ∈ S n der Pol der Hemisphäre ist (N ∈ Hn , −N ∈ / HN ). Ein Zweieck ist der Schnitt von zwei verschiedenen, nicht gegenüberliegenden Hemisphären, also HN ∩ HN 0 mit N 6= ±N 0 . Lemma 6.2. Jede Hemisphäre hat die Hälfte des Volumens der n-dimensionalen Sphäre. Ein Zweieck hat einen Anteil von α b/2π am Volumen der n-Sphäre, wobei α b der Außenwinkel des Zweiecks ist, also α b + α = 2π, α α0 hN, N 0 i = cos α b, m n α 40 hN, N 0 i = − cos α. 6.2 Sphärische Dreiecke Sehr viel Geometrie lässt sich von der Geometrie von Dreiecken ableiten. Jedes Dreieck liegt in einer 2-dimensionalen Hypersphäre, also dem Schnitt der S n mit einem 3-dimensionalen Unterraum des Rn+1 . Daher nehmen wir im Folgenden ohne Einschränkung der Allgemeinheit an, dass wir ein sphärisches Dreieck in der S 2 betrachten. Definition 6.3 (Dreieck). Ein Dreieck 4 ⊂ S 2 ist in der sphärischen Geometrie ein Schnitt dreier Hemisphären 4 := HA0 ∩ HB 0 ∩ HC 0 deren Pole A0 , B 0 , C 0 nicht kollinear sind (also nicht auf einem Großkreis liegen). Lemma 6.4. Jedes sphärische Dreieck 4 ⊂ S 2 lässt sich auch beschreiben als 4 = {x ∈ S 2 : x = λA + µB + νC, λ, µ, ν ≥ 0} für drei nicht kollineare Punkte A, B, C ∈ S 2 , die Ecken des Dreiecks. C a b A c B Beweis. Die Punkte A, B, C sind gegeben durch A= B0 × C 0 , |B 0 × C 0 | B= C 0 × A0 , |C 0 × A0 | 41 C= A0 × B 0 . |A0 × B 0 | Mit dieser Konstruktion überprüft man hA0 , Ai > 0, hB 0 , Ai = 0, hC 0 , Ai = 0, hA0 , Bi = 0, hB 0 , Bi > 0, hC 0 , Bi = 0, hA0 , Ci = 0, hB 0 , Ci = 0, hC 0 , Ci > 0. Lemma 6.5. Im Dreieck 4 = ABC sind die Kantenlängen (in der intrinsischen Metrik der Sphäre, vom Durchmesser π) gegeben durch cos a = hB, Ci, cos b = hC, Ai, cos c = hA, Bi und die äußeren Winkel durch cos α b = hB 0 , C 0 i, cos βb = hC 0 , A0 i, cos γ b = hA0 , B 0 i, mit Innenwinkeln α = π − α b usw. Proposition 6.6. Zu jedem Dreieck 4 = ABC gibt es das duale Dreieck 40 = A0 B 0 C 0 so dass • das Duale des Dualen ist das Ausgangsdreieck: 400 = 4, • die Kantenlängen des Dreiecks sind die Außenwinkel des Dualen, und umgekehrt: a0 = α b, usw. Ende 14.6.2011 Lemma 6.7 (Dreiecksungleichungen). Die Kantenlängen, Außenwinkel und Innenwinkel des sphärischen Dreiecks 4 = ABC erfüllen a+b−c>0 a−b+c>0 b α b+β−γ b>0 α b − βb + γ b>0 α+β−γ <π α−β+γ <π −a+b+c>0 −α b + βb + γ b>0 −α+β+γ <π a + b + c < 2π α b + βb + γ b < 2π α + β + γ > π. Beweis. Die ersten drei Ungleichungen für die Seitenlängen folgen aus der Dreiecksungleichung für die Metrik auf der Sphäre. Die vierte folgt aus a+b+c = d(B, C)+d(C, A)+d(A, B) < d(B, C)+d(C, −B)+d(−B, A)+d(A, B) = π+π. Die Ungleichungen für die Außenwinkeln folgen daraus sofort nach Proposition 6.6, und damit auch die Ungleichungen für die Innenwinkel mit α = π − α b usw. Insbesondere wissen wir aus Lemma 6.7, dass in jedem sphärischen Dreieck die Winkelsumme α + β + γ größer ist als π Theorem 6.8. Die Fläche des Dreiecks 4 = ABC mit Innenwinkeln α, β, γ ist α + β + γ − π. 42 −A C −∆ ∆ −C A Beweis. Die Zweiecke, die von den Innenwinkeln von 4 und von denen des gegenüberliegenden Dreiecks −4 aufgespannt werden, überdecken die Sphäre S 2 ganz, dabei die Dreiecke 4 und −4 dreifach, den Rest aber einfach. Also erhalten wir (2α + 2β + 2γ) + (2α + 2β + 2γ) = 4π + 2Vol(4) + 2Vol(4), also 4α + 4β + 4γ = 4π + 4Vol(4). Proposition 6.9. Seien a, b, c ∈ R. (i) Ein sphärisches Dreieck mit den Kantenlängen a, b, c existiert dann und nur dann, wenn die vier Dreiecksungleichungen a+b−c>0 a−b+c>0 −a+b+c>0 a + b + c < 2π erfüllt sind. (ii) Wenn das Dreieck existiert, dann ist es eindeutig bis auf Kongruenztransformationen. Beweis. Wir dürfen A, B im Abstand c auf dem Äquator platzieren, und betrachten die Kreisscheiben KA und KB vom Radius b bzw. a um A bzw. B. 43 Wir brauchen, dass die Kreisscheiben überlappen und sich die Randkreise in zwei Schnittpunkten (in der oberen und in der unteren Hemisphäre) schneiden. Das wird durch die vier Ungleichungen garantiert: Wenn a + b ≤ c ist, dann sind die beiden Kreisschreiben disjunkt. Wenn a + c ≥ b, dann ist KB ⊂ KA ; wenn b + c ≥ a, dann ist KA ⊂ KB . Wenn a + b + c ≥ 2π, dann ist KA ∪ KB = S 2 , die Kreischeiben überdecken die Sphäre, aber die Randkreise schneiden sich nicht. a c b In allen anderen Fällen gibt es wie gewünscht die beiden Schnittpunkte, und daraus folgt Existenz und Eindeutigkeit des Dreiecks. In jedem sphärischen Dreieck kann man aus den Seitenlängen die Winkel berechnen (wie in der eukldischen Geometrie, mit Hilfe des Kosinussatzes!), aber auch aus den Winkeln die Seitenlängen berechnen. Proposition 6.10 (Kosinussatz). Im sphärischen Dreieck mit Kantenlängen a, b, c und Außenbγ winkeln α b, β, b gilt der Seitenkosinussatz − cos a + cos b cos c cos α b= sin b sin c und der Winkelkosinussatz − cos α b + cos βb cos γ b cos b a= . sin βb sin γ b und entsprechend für cos βb und cos γ b bzw. cos b und cos c bei gleichzeitiger Permutation von a → b → c und α b → βb → γ b. Beweis. Seien V := (A B C) ∈ R3×3 und W := (A0 B 0 C 0 ) ∈ R3×3 die Basismatrizen, die dem Dreieck bzw. dem polaren Dreieck entsprechen. Die Gram-Matrix zu V ist dann die symmetrische, positiv-definite Matrix hA, Ai hA, Bi hA, Ci 1 cos c cos b 1 cos a . G := V t V = hB, Ai hB, Bi hB, Ci = cos c hC, Ai hC, Bi hC, Ci cos b cos a 1 Genauso gehört zu W die Gram-Matrix 0 0 hA , A i hA0 , B 0 i hA0 , C 0 i 1 cos γ b cos βb b 1 cos α b . G0 := W t W = hB 0 , A0 i hB 0 , B 0 i hB 0 , C 0 i = cos γ 0 0 0 0 0 0 hC , A i hC , B i hC , C i cos βb cos α b 1 44 Und schließlich berechnen wir das Produkt 0 0 hA , Ai hA0 , Bi hA0 , Ci hA , Ai 0 hB 0 , Bi 0 =: D, W t V = hB 0 , Ai hB 0 , Bi hB 0 , Ci = 0 0 0 0 0 hC , Ai hC , Bi hC , Ci 0 0 hC , Ci eine Diagonalmatrix mit positiven Diagonaleinträgen, also invertierbar. Damit können wir G0 einerseits aus W berechnen, also aus cos α b, cos βb und cos γ b, andererseits t −1 t −1 0 t aus V mit W = DV und W = (V ) D, und damit G = W W = DV −1 (V t )−1 D = DG−1 D, und damit aus a, b und c. Gleichsetzen der beiden Ausdrücke für G0 und Vergleich der Matrixeinträge liefert zuerst Formeln für die Diagonaleinträge von D, und dann die Seitenkosinussätze. Die Winkelkosinussätze erhält man entweder analog, oder viel einfacher aus der Dualität von Proposition 6.6. Wir geben zwei weitere, wichtige Formeln/Resultat der sphärischen Geometrie ohne Beweis an. Proposition 6.11 (Sinussatz). Im sphärischen Dreieck mit Kantenlängen a, b, c und Außenwinbγ keln α b, β, b gilt sin b sin c sin a = = . sin α b b sin βb sin γ (Dies gilt natürlich genauso für die Innenwinkel α, β, γ, wegen α b = π − α und damit sin α b= sin α, usw.) Proposition 6.12 (Napier’sche Regel). Im rechtwinkligen sphärischen Dreieck mit Seitenlängen a, b, c, Innenwinkeln α, β sowie γ = π/2, und “Seitenkomplementen” b a := π − a, bb := π − a gilt cos c = sin b a sin bb = cot α cot b, sowie die vier weiteren Gleichungen, die man durch die zyklische Vertauschung c → α → bb → b a→β→c daraus gewinnen kann. b b α a α a β β c c Ende 16.6.2011 45 6.3 Sphärische und Elliptische Geometrie Im letzten Abschnitt haben wir die Geometrie von sphärischen Dreiecken in der S 2 analysiert. Alle Ergebnisse gelten aber genauso in der S n (n ≥ 2), weil jedes Dreieck der S n in einer 2-dimensionalen Untersphäre liegt. Weiter kann man analysieren, dass die hochdimensionale Geometrie sehr weitgehend aus der Geometrie von Dreiecken abgeleitet werden kann. Siehe zum Beispiel die Beiträge zur “Coarse Metric Geometry” von Mikhail Gromov, dem Abel-Preisträger von 2010, vgl. Burago, Burago & Ivanov [2]. Trotzdem ist auch festzustellen, dass die Gewinnung von expliziten Formeln, zum Beispiel für das Volumen eines sphärischen Tetraeders aus den Kantenlängen, schwierig ist, und tief in andere Bereiche der Mathematik führt — zum Beispiel in die Algebraische Topologie (KTheorie!), siehe Dupont [4]. Die Geometrie, die wir dabei betrachten, ist nach Klein durch X = Sn G = O(n + 1) gegeben. Zu den Invarianten gehört dann die Metrik d(x, y) = cos−1 hx, yi, die Werte im Intervall [0, π] annimmt. Will man eine Geometrie im Sinne von Euklid und Hilbert gewinnen, in der es durch zwei verschiedene Punkte immer genau eine Gerade gibt, so muss man gegenüberliegende Punkte auf der Sphäre identifizieren: Definition 6.13 (Elliptische Geometrie). Für die Elliptische Geometrie nehmen wir als Punkte die Paare von antipodalen Punkten von S n , als Geraden die Mengen der Antipodenpaare auf einem Großkreis. Wir erhalten so die Geometrie X = S n /(x ∼ −x) = RPn G = O(n + 1)/(±I) = P O(n + 1). In dieser Geometrie geht nicht nur durch zwei verschiedenen Punkte genau eine Gerade, sondern zwei verschiedene Geraden schneiden sich immer in genau einem Punkt, es gibt also keine Parallelen — genau wie in der projektiven Geometrie (X = RPn , G = P GL(n + 1, R)), wobei die elliptische Geometrie aber eine viel kleinere Gruppe hat, und dafür mehr Invarianten, unter anderem die Metrik d(x, y) = min{cos−1 hx, yi, cos−1 hx, −yi} = cos−1 |hx, yi|, die Werte im Intervall [0, π/2] annimmt. Dreiecke, Winkel, Volumina etc. verhalten sich dabei sehr ähnlich wie in der sphärischen Geometrie, wobei die Geometrie nur für ungerades n orientierbar ist. Literatur [1] Benno Artmann. Euclid — The Creation of Mathematics. Springer-Verlag, New York, 1999. 46 [2] Dmitri Burago, Yuri Burago, and Sergei Ivanov. A Course in Metric Geometry, volume 33 of Graduate Studies in Math. Amer. Math. Soc., 2001. [3] Oliver Byrne. The first six books of the elements of euclides. web presentation by Bill Casselman; http://www.math.ubc.ca/˜cass/Euclid/byrne.html. [4] Johan L. Dupont. Scissors congruences, group homology and characteristic classes,, volume 1 of Nankai Tracts in Mathematics. World Scientific, Singapore, 2001. [5] Euclid. The Elements. web presentation by David E. Joyce; http://aleph0.clarku.edu/ ˜djoyce/java/elements/toc.html. [6] Robin Hartshorne. Geometry: Euclid and Beyond. Undergraduate Texts in Math. Springer-Verlag, New York, 2000. [7] David Hilbert. Grundlagen der Geometrie. Chelsea Publishing Company, Leipzig, 1899. mit zahlreichen Neuauflagen, zuletzt bei Teubner, Stuttgart 1999. 47 7 Möbiusgeometrie Quelle/Referenz für dieses Kapitel: Springborn [1, Lectures 28/29] 7.1 Spiegelung an einer Sphäre Jede Hyperebene H ⊂ Rn kann in der Form H = {x ∈ Rn : hx − a, vi = 0} geschrieben werden, wobei a ∈ H ist und v 6= 0 ein Normalenvektor ist. Die Spiegelung an H ist gegeben durch x 7−→ x = x − 2 Dabei liegt x b =: x − hx−a,vi x hx,xi hx − a, vi x. hx, xi auf der Hyperebene, und es gilt |x − x b| = |x − x b|. v x x a Sehr ähnlich definiert man die Spiegelung (oder “Inversion”) an einer Sphäre. Definition 7.1 (Spiegelung an einer Sphäre). Sei S(c, r) := {x ∈ Rn : hx − c, x − ci = r2 } die Sphäre mit Mittelpunkt c ∈ Rn und Radius r > 0. Die Spiegelung an S(c, r) ist die Abbildung x 7−→ x = c + r2 (x − c). hx − c, x − ci x r x c Wir notieren: • x liegt auf dem Strahl, der in c beginnt und durch x geht. • Dabei gilt |x − c||x − c| = r2 . • Die Punkte auf S(c, r) werden auf sich selbst abgebildet. • Die Abbildung ist eine Involution: x 7→ x 7→ x = x. 48 • Die Abbildung ist für x = c nicht definiert. Wir fügen einen Punkt im Unendlichen “∞” hinzu, und definieren dann die Abbildung als c 7→ ∞ and ∞ 7→ c. • Mit dieser Festsetzung ist die Spiegelung an der Sphäre S(c, r) eine Bijektion Rn ∪ {∞} → Rn ∪ {∞}. 7.2 Möbiusgeometrie Definition 7.2 (Möbiustransformationen, Möbiusgeometrie). Eine Möbiustransformation ist eine Abbildung f : Rn ∪ {∞} → Rn ∪ {∞}, die sich als Hintereinanderausführung von endlich vielen Spiegelungen in Hyperebenen und/oder Sphären darstellen lässt. Ist eine Möbiustransformatione ein Hintereinanderausführung einer geraden Anzahl von Spiegelungen, so ist sie orientierungs-erhaltend, andernfalls ist sie orientierungs-umkehrend. Die Gruppe der Möbiustransformationen bezeichnen wir mit Möb(n), die Untergruppe der orientierungs-erhaltenden Möbiustransformationen mit Möb+ (n). X = Rn ∪ {∞}, G := Möb(n). In dieser Definition sind natürlich einige Behauptungen versteckt, etwa dass Möb(n) wirklich eine Gruppe ist und Möb+ (n) eine Untergruppe, und dass Orientierung wohldefiniert ist. Lemma 7.3. Ähnlichkeitsabbildungen sind Möbiustransformationen: Ähnl(n, R) = Rn o (O(n) × R>0 ) ⊆ Möb(n). Beweis. Jede orthogonale Abbildung in O(n) ist eine Hintereinanderausführung von höchstens n Spiegelungen an Hyperebenen. Translationen kann durch Spiegelung an zwei parallelen Hyperebenen erzeugen. Die Streckung x 7→ λx erhält man durch Spiegelung an S n−1 = S(0, 1), gefolgt von Spiegelung √ an S(0, λ). Ab jetzt: “Sphären” in der Möbiusgeometrie meint (n − 1)-dimensionale Sphären S(c, r) ⊂ Rn sowie Hyperebenen (als “Sphären durch ∞”). Theorem 7.4. Möbiustransformationen bilden Hyperebenen und Sphären auf Hyperebenen und Sphären ab. Beweis. (1) Es reicht, das für die Spiegelung in der Einheitssphäre S n−1 ⊂ Rn−1 zu zeigen, weil jedes Sphäreninversion in einer beliebigen Sphäre S dargestellt werden kann als – Ähnlichkeitstransformation, die S auf S(0, 1) abbildet, – gefolgt von Inversion in S(0, 1) – gefolgt von Umkehrung der Ähnlichkeitstransformation. (2) Wir zeigen, dass {x ∈ Rn : p|x|2 − 2hx, vi + q = 0} für |v|2 − pq > 0 genau die Sphären (also (n − 1)-Sphäre und Hyperebenen) im Rn beschreibt. Für p = 0 folgt nämlich v 6= 0, und wir haben eine Hyperebenengleichung. Für p 6= 0 zeigt quadratische Ergänzung, dass dies eine Sphärengleichung ist. 49 (3) Rechnung: Für x := 1 x |x|2 gilt p|x|2 − 2hx, vi + q = 0 ⇐⇒ q|x|2 − 2hx, vi + v = 0. Theorem 7.5 (Möbiustransformationen sind lokal winkelerhaltend (“konform”)). Möbiustransformationen erhalten lokal die Winkel zwischen glatten Kurven (insbesondere: Geraden, Kreise) die sich schneiden. Beweis. Weil Ähnlichkeitsabbildungen offenbar konform sind, reicht es, dies für die Inversion in der Einheitssphäre x 7→ |x|1 2 x nachzuweisen. Dafür betrachtet man nun zwei Kurven γ(t) und η(t) mit γ(0) = η(0) = p und rechnet nach, 1 0 0 0 0 dass hγ 0 , γ 0 i = hγ,γi 2 hγ , γ i, similarly for hη , η i, and evaluates at t = 0. Ende 21.6.2011 Bemerkung 7.6. (1) “winkelerhaltend” gilt auch bei ∞, wenn man den Winkel im Unendlichen geeignet interpretiert. (Dazu betrachtet man Geraden durch den Mittelpunkt der Sphäre, in der invertiert wird.) (2) Für n > 2 gilt auch die Umkehrung: eine konforme Abbildung ist eine Möbiustransformation. Auch schon lokal. Für n = 2 ist das global auch richtig, lokal aber völlig falsch: Riemann’scher Abbildungssatz. Trotzdem ist komplexe Interpretation wichtig, siehe nächster Abschnitt. Umkehrung von Theorem 7.4: Proposition 7.7. Für n > 1 sind die Abbildungen f : Rn ∪{∞} → Rn ∪{∞}, die Hyperebenen und Sphären auf Hyperebenen und Sphären abbilden, genau die Möbiustransformationen. Beweis. Eine solche Abbildung bildet insbesondere auch Kreise und Geraden (die 1-dimensionalen Schnitte von Hyperebenen uns Sphären) auf Kreise und Geraden ab. (1) Im Fall f (∞) = ∞ werden alle Geraden auf Geraden abgebildet. ALso haben wir es nach Bemerkung 2.2 mit einer affinen Abbildung zu tun. Weiter dürfen wir (nach einer Translation) annehmen, dass die Abbildung 0 auf 0 abbildet. Also ist die Abbildung linear. Wenn nun weiter die Einheitssphäre auf die Einheitssphäre abgebildet wird, dann ist die Abbildung eine Ähnlichkeitstransformation (nämlich ein Vielfaches einer orthogonalen Abbildung). (2) Gilt f (∞) = c, so sei g die Inversion in der Sphäre S(c, 1). Weil die Sphäreninversion g Hyperebenen und Sphären auf Hyperebenen und Sphären abbildet, gilt dies auch für die Abbildung g ◦ f . Die Abbildung g ◦ f bildet nach ∞ nach ∞ ab, ist also nach Fall (1) eine Möbiustransformation. Weil g = g −1 als Sphäreninversion aber auch eine Möbiustransformation ist, gilt dies auch für f . Bemerkung: für n = 1 ist das natürlich falsch. Erweiterung von Lemma 7.3: Korollar 7.8. Ähnlichkeitstransformationen sind genau die Möbiustransformationen, die ∞ fixieren. 50 7.3 Komplex-projektive Interpretation der 2-dimensionalen Möbiusgeometrie Im Fall n = 2 können wir den R2 mit der komplexen Zahlenebene identifizieren, R2 ∪ {∞} also mit C ∪ {∞}. Die Möbiustransformationen in der Ebene können wir alle als gebrochen-lineare komplexe oder konjugiert-komplexe Funktionen darstellen: • orientierungserhaltende Ähnlichkeitstransformationen sind z 7→ az + b für a, b ∈ C, |a| = 1, orientierungsumkehrende Ähnlichkeitstransformationen sind z 7→ az + b für a, b ∈ C, |a| = 1, • Spiegelung an der x-Achse ist z 7→ z, • Spiegelung im Einheitskreis ist z 7→ 1 z0 |z|2 = z1 . b = sind genau Proposition 7.9. Die orientierungserhaltenden Möbiustransformationen auf C die Transformationen az + b a b z 7→ für a, b, c, d ∈ C mit det 6= 0, c d cz + d b = die orientierungsumkehrenden Möbiustransformationen auf C tionen az + b a für a, b, c, d ∈ C mit det z 7→ c cz + d sind genau die Transforma b 6= 0. d Beweis. (1) Die angegebenen gebrochen-linearen Transformationen bilden eine Gruppe: Die orientierungserhaltenden sind dabei genau die projektiven Transformationen von CP1 . (2) Als Spezialfälle identifizieren wir alle oben angegebenen Erzeuger für die Möbiustransformationen in der Ebene; also ist die Gruppe Möb(2) in der Gruppe der gebrochen-linearen komplexen Funktionen enthalten. (3) Umgekehrt sieht man aus az + b a bc − ad = + cz + d c c(cz + d) für c 6= 0, dass jede gebrochen-lineare Funktion sich als Komposition der oben angegebenen Erzeuger schreiben lässt. Entsprechend gilt das, wenn wir z durch z erzeugen. Daraus folgt auch die umgekehrte Inklusion: Jede gebrochen-lineare komplexe oder konjugiert-komplexe Funktion ist eine Möbiustransformation. Insbesondere sehen wir also, dass Möb+ (2) ∼ = PGL(2, C). Aus der Identifikation der Möbiusgruppe der Ebene mit komplex-projektiven Transformationen können wir nun leicht mehrere wichtige Schlussfolgerungen ziehen Korollar 7.10. (1) orientierungserhaltende Möbiustransformationen der Ebene erhalten das komplexe Doppelverhältnis [z1 , z2 ; z3 , z4 ] = (z1 − z3 )(z2 − z4 ) , (z2 − z3 )(z1 − z4 ) 51 für vier beliebige komplexe Zahlen z1 , z2 , z3 , z4 ∈ C ∪ {∞} von denen mindestens drei verschieden sind, orientierungsumkehrende Möbiustransformationen konjugieren das Doppelverhältnis. (2) “6-Punkte-Formel”: Sind z1 , z2 , z3 und w1 , w2 , w3 jeweils drei verschiedene Werte, so gibt es genau eine gebrochen-lineare Funktion f ∈ PGL(2, z) mit f (zi ) = f (wi ). (3) Vier Punkte z1 , z2 , z3 , z4 liegen genau dann auf einem Kreis, wenn ihr Doppelverhältnis reell ist. 7.4 Stereographische Projektion als Möbiusabbildung Definition 7.11 (Stereographische Projektion). Sei S n = S(0, 1) ⊂ Rn+1 die Einheitssphäre, und sei H ⊂ Rn+1 die durch xn+1 = 0 (Variante 1) bzw. xn+1 = −1 (Variante 2) gegebene Hyperebene, welche wir (durch weglassen der konstanten letzten Koordinate, also 0 oder −1) mit Rn identifizieren können. Die stereographische Projektion ist die Abbildung S n → H ∪ {∞}, die dadurch gegeben wird, dass der Nordpol N ∈ S N auf ∞ abgebildet wird, und jeder andere Punkt von P ∈ S n auf eindeutigen Schnittpunkt der Geraden P N mit der Hyperebene H. Variante 1: N O Sn H = {x ∈ Rn+1 | xn+1 = 0} Variante 2: N O Sn H = {x ∈ Rn+1 | xn+1 = −1} Proposition 7.12. Die Stereographische Projektion ist die Einschränkung einer Möbiustrans√ formation Rn+1 ∪ {∞} → Rn+1 ∪ {∞}, nämlich der Sphäreninversion in der Sphäre S(N, 2) in Variante 1 bzw. der Sphäre S(N, 2) in Variante 2. 52 Beweis. Die Sphäreninversion bildet (in beiden Varianten) Geraden durch den Mittelpunkt N der Inversionssphäre auf Geraden durch N ab, andererseits die Sphäre S n auf die Hyperebene H ∪ {∞} ab — also den Schnittpunkt jeder Gerade mit S \ {N } auf den Schnittpunkt derselben Geraden mit H. Daraus folgt schon alles. Korollar 7.13. Die stereographische Projektion ist konform. Korollar 7.14 (Delaunay-Triangulierung). [vgl. Vorlesung] 7.5 Lorentz-Geometrie Definition 7.15. Für p, q ≥ 0 bezeichnet Rp,q den Vektorraum Rn+1 mit der Bilinearform hx, yi := x1 y1 + · · · + xp yp − xp+1 yp+1 − · · · − xp+q yp+q , die wir als Skalarprodukt bezeichnen. Allgemeiner könnten wir mit einen endlich-dimensionalen reellen Vektorraum Rm arbeiten, auf dem eine symmetrische Bilinearform gegeben ist, die nicht degeneriert (die also vollen Rang hat: nur der Nullvektor ergibt mit jedem anderen Vektor Null), die abernicht notwendigerweise positiv definit ist. In dieser Situation kann man den Algorithmus von Gram-Schmidt so anpassen, dass er doch eine “Orthogonalbasis” e1 , . . . , en liefert, für die für 1 ≤ i = j ≤ p, 1 hei , ej i = −1 für p < i = j ≤ p + q, 0 für i 6= j gilt. Hier ist p die maximale Dimension eines Unterraums, auf dem h·, ·i positiv definit ist, q die maximale Dimension eines Unterraums, auf dem das Skalarprodukt negativ definit ist. Insbesondere gilt p + q = m (weil das Skalarprodukt nach Annahme nicht degeneriert ist), und die Kennzahlen p und q sind für alle Orthogonalbasen dieselben. Das Paar (p, q) heißt der Index des Vektorraums. Mit O(p, q) bezeichnet man die Gruppe aller orthogonalen Transformationen auf Rp,q , die also das Skalarprodukt erhalten. Uns interessiert im Folgenden besonders der Spezialfall q = 1. Definition 7.16 (Lorentz-Raum). Der Raum Rn,1 , also der Vektorraum Rn+1 mit dem Skalarprodukt hx, yi := x1 y1 + · · · + xn yn − xn+1 yn+1 heißt ein Lorentz-Vektorraum. Die Lorentz-Gruppe aller linearen Transformationen T : Rn+1 → Rn+1 , die das Skalarprodukt erhalten, für die also hT v, T wi = hv, wi für alle v, w gilt, wird mit O(n, 1) bezeichnet. Lemma 7.17 (Koordinatendarstellung). Eine Matrix A ∈ O(n, 1) ist dadurch charakterisiert, dass die Spalten eine Orthonormalbasis bezüglich des gegebenen Skalarprodukts bilden, dass also At EA = E 53 gilt, wobei E die Diagonalmatrix E= In 0 0t −1 bezeichnet. 1 Definition 7.18 (Bezeichungen aus der Relativitätstheorie). Ein Vektor x ∈ Rn, heißt • raumartig, wenn hx, xi > 0, • lichtartig, wenn hx, xi = 0, • zeitartig, wenn hx, xi < 0. Der Doppelkegel der lichtartigen Vektoren heißt der Lichtkegel. R zeitartig ( innerhalb“ des Lichtkegels) ” lichtartig (auf dem Lichtkegel) raumartig ( außerhalb“ des Lichtkegels) ” Rn Beispiel 7.19. Im Lorentz-Raum R1,1 ist das Skalarprodukt durch hx, yi = x1 y1 −x2 y2 gegeben. Die Mengen {x ∈ R1,1 : hx, xi = 1} und {x ∈ R1,1 : hx, xi = −1} sind jeweils Hyperbeln. √ 1 1 0 2 Orthonormalbasen sind zum Beispiel , und , √ . 0 1 1 2 Beachte: Orthonormalbasen müssen wir als geordnete Folgen von Vektoren schreiben, weil es auf die Reihenfolge ankommt. 54 hx, xi = −1 hx, xi = 1 x2 √ (1, 2) (0, 1) √ ( 2, 1) (1, 0) x1 hx, xi = 1 hx, xi = −1 Definition und Lemma 7.20. Die Menge der zeitartigen Vektoren Q := {x ∈ Rn,1 : hx, xi = −1} ⊂ Rn+1 ist ein zweischaliges Hyperboloid. Dabei bezeichnet H n := {x ∈ Rn,1 : hx, xi = −1, xn+1 > 0} die obere Schale. Jede orthogonale Transformation bildet die Vektoren in der oberen Schale H n entweder auf die Vektoren der oberen Schale ab, oder auf die Vektoren der unteren Schale (d.h., er vertauscht die Schalen. Die Untergruppe der orthogonalen Transformationen, die die obere Schale auf sich selbst abbilden, wird mit O+ (n, 1) bezeichnet. Sie ist O+ (n, 1) = {A ∈ O(n, 1) : an+1,n+1 > 0}. 7.6 Das reell-projektive Modell Mit Hilfe der (inversen) stereographischen Transformation können wir die n-dimensionale Möbiusgeometrie auch auf der n-dimensionalen Sphäre X := S n ⊂ Rn+1 interpretieren. Die Möbiustransformationen sind also die Gruppe G der Abbildungen S n → S n , die Untersphären von S n (also die Schnitte mit Hyperebenen) auf Untersphären abbilden. Daraus folgt, dass die n-dimensionale Möbiusgruppe die Menge aller projektiven Transformationen auf dem Rn+1 enthält, die die Sphäre S n auf sich selbst abbilden. Diese Gruppe kann man mit P O(n + 1, 1) identifizieren — die S n wird dabei als der projektivierte Lichtkegel im Rn+1,1 interpretiert. Wir sehen also, dass P O(n + 1, 1) ⊆ Möb(n). Es gilt aber noch mehr. Theorem 7.21 (Das reell-projektive Modell der Möbiusgeometrie). Die n-dimensionale Möbiusgeometrie kann durch die Menge X = S n ⊂ Rn+1 ⊂ RPn+1 mit der Gruppe P O(n + 1, 1) = Möb(n) dargestellt werden. 55 Beweis. Um dies zu beweisen, müssen wir nur noch zeigen, dass die Transformationen, die die Möbiusgruppe erzeugen, mittels der stereographischen Projektion auf die Sphäre S n transportiert, durch projektive Abbildungen dargestellt werden können, die die Sphäre fest halten. Die (n − 1)-dimensionalen Untersphären der S n können hierbei mit Hyperebenen im RPn+1 interpretiert werden, die S n echt schneiden — und diese können wir mit ihren Normalenvektoren, also den raumartigen Punkten in RPn+1 identifiziert werden, also mit den Punkten “außerhalb” der Sphäre S n ⊂ Rn+1 . Man verifizierte dafür, dass “außerhalb” hier wohldefiniert ist . . . Korollar 7.22 (Darstellung von Möbiustransformationen durch Matrizen). Möbiustransformationen können durch Aquivalenzklassen von (n + 2) × (n + 2)-Matrizen in A ∈ O(n + 1, 1) dargestellt werden. Es ist also Möb(n) = P O(n + 1, 1) = O(n + 1, 1)/(R \ {0}). Literatur [1] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School, 2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/ geometry1_ws07.pdf. 56 8 Hyperbolische Geometrie Quelle/Referenz für dieses Kapitel: Springborn [1, Lectures 7–11] 8.1 Der n-dimensionale hyperbolische Raum Definition 8.1 (Hyperbolische Geometrie). Die n-dimensionale hyperbolische Geometrie ist die Menge H n := {x ∈ Rn,1 : hx, xi = −1, xn+1 > 0} (also die obere Schale des zweischaligen Hyperboloids im zeitartigen Bereich der (n + 1)dimensionalen Lorentz-Raum) mit der hyperbolischen Gruppe O+ (n, 1) = {A ∈ R(n+1)×(n+1) : At EA = A, an+1,n+1 > 0} der orthogonalen Lorentz-Transformationen, die die Schale auf sich selbst abbilden. Die hyperbolischen Geraden sind die nicht-leeren Schnitte von H n mit zwei-dimensionalen linearen Untervektorräumen des Rn,1 . Offensichtlich gibt es durch zwei verschiedene Punkte x, y ∈ H n immer genau eine Gerade. Bemerkung 8.2 (Kleine Formelsammlung). Im Folgenden brauchen wir den hyperbolischen Sinus und Kosinus ex + e−x ex − e−x sinh x = , cosh x = 2 2 f (x) f (x) = cosh x f (x) = sinh x 1 0 1 x Offenbar gilt sinh −x = − sinh x, cosh −x = cosh x, cosh x ≥ x, sinh0 x = cosh x, cosh0 x = sinh x, und insbesondere cosh2 x − sinh2 x = 1 für alle x ∈ R. Die Umkehrfunktionen, Areasinus und Areakosinus, sind √ √ arsinh x = ln(x + x2 + 1), arcosh x = ln(x + x2 − 1), letzterer nur für x ≥ 1. 57 Beispiel 8.3 (1-dimensionaler hyperbolischer Raum). Für n = 1 erhalten wir H 1 ⊂ R1,1 als Hyperbelast. x2 H1 (sinh s, cosh s) x1 Dieser kann durch sinh s cosh s γ(s) := parametrisiert werden — und dies ist die Parametrisierung mit “Geschwindigkeit 1”, also nach Bogenlänge: cosh s 0 γ (s) = mit hγ 0 (s), γ 0 si = 1. sinh s Damit berechnen wir Abstände als Z s2 length(γ(s)|[s1 ,s2 ] ) = | p hγ 0 (s), γ 0 si| = |s2 − s1 |. s1 Wir berechnen das Skalarprodukt von zwei Punkten x = γ(s1 ) und y = γ(s2 ) auf H 1 als hx, yi = hγ(s1 ), γ(s2 )i = sinh s1 sinh s2 − cosh s1 cosh s2 = − cosh(s2 − s1 ). Damit ist die Metrik in der 1-dimensionalen hyperbolischen Geometrie gegeben durch − cosh d(x, y) = hx, yi. Lemma 8.4 (Hyperbolische Drehmatrizen). cosh s sinh s − cosh s sinh s + O (1, 1) = { : s ∈ R} ∪ { : s ∈ R}. sinh s cosh s − sinh s cosh s Die erste der beiden Teilmengen von Matrizen ist die Untergruppe der Matrizen der Determinante +1, also SO+ (1, 1). Die hyperbolischen Drehmatrizen sind genau die Matrizen, die H 1 auf sich selbst abbilden. Wir definieren Metrik auf hyperbolischem Raum mit Hilfe der Metrik von Rn+1 . Das definiert eine Metrik, weil die Tangentialvektoren raumartig sind! Dafür verwenden wir, dass jeder Tangentialvektor γ 0 (0) an H n auf dem Vektor γ(0) senkrecht steht, hγ 0 (0), γ(0), und dass daraus folgt, dass γ 0 (0) raumartig ist. (Das kann man geometrisch argumentieren, weil spann{γ 0 (0), γ(0)} zweidimensional ist, also die Hyperebene xn+1 = 0 schneidet.) 58 Proposition 8.5. Der kürzeste (stückweise-differenzierbare) Weg zwischen zwei Punkten in H n liegt auf der Geraden. Beweis. Das wird hier nicht bewiesen (dafür vergleicht man den Fortschritt des Weges γ(s) mit der Funktion der linearen Abstände d(x, γ(0)) = arcosh(−hx, γ(0)), und verwendet CauchySchwartz sowie hγ(s), γ 0 (s)i = 0.) Damit ist aber insgesamt die Abstandsfunktion auf H n durch − cosh d(x, y) = hx, yi. gegeben, und die hyperbolischen Transformationen erhalten Abstände. Beispiel 8.6 (2-dimensionaler hyperbolischer Raum). Für n = 2 erhalten wir H 2 ⊂ R2,1 als obere Schale des zweischaligen Hyperboloids. x3 H2 R2 Jede Gerade ` ⊂ H 2 lässt sich darstellen als ` = H 2 ∩ U für U = {x ∈ R2,1 : hx, ni = 0} mit n ∈ R2,1 raumartig und normiert, hn, ni = 1. Proposition 8.7. Seien n1 6= ±n2 raumartig, hni , ni i = 1, sowie `1 , `2 die zugehörigen Geraden. Dann sind äquivalent: (i) `1 ∩ `2 6= ∅, (ii) Das Skalarprodukt h·, ·i eingeschränkt auf spann{n1 , n2 } ist positiv definit, (iii) |hn1 , n2 i| < 1. Beweis. (i)⇒(ii): Für den Schnittpunkt x gilt {x}⊥ = spann{n1 , n2 }. Alle Vektoren, die auf x senkrecht stehen, sind raumartig. (ii)⇒(i): spann{n1 , n2 }⊥ ist eindimensional, und wird von einem zeitartigen Vektor aufgespannt. (ii)⇒(iii): Wir stellen das Skalarprodukt eingeschränkt auf spann{n1 , n2 }⊥ durch die Matrix hn1 , n1 i hn1 , n2 i 1 hn1 , n2 i M= = hn2 , n1 i hn2 , n2 i hn2 , n1 i 1 dar. Das Skalarprodukt ist positiv definit, wenn die Matrix positiv definit ist, und dafür muss die Determinante positiv sein, also 1 − hn1 , n2 i2 > 0. 59 Lemma 8.8 (Winkel). Seien `1 , `2 zwei sich schneidende Geraden in der hyperbolischen Ebene H 2 , und seien hi := {y ∈ H 1 : hy, ni i ≥ 0} die Halbebenen, die durch `1 , `2 gegeben sind, mit Einheitsnormalenvektoren n1 , n2 . Dann gibt es eine eindeutige hyperbolische Rotation (in H 2 ), gegeben durch eine Matrix/ Transformation T ∈ O(2, 1), um den Schnittpunkt {x} = `1 ∩ `2 , die h1 in h2 überführt und x fest lässt. Der Drehwinkel ist gegeben durch cos α = hn1 , n2 i; das ist auch der Außenwinkel des Kegels h1 ∩ h2 mit Spitze x in der hyperbolischen Ebene. Beweis. Nach Konstruktion steht x senkrecht auf n1 und n2 . Verwendet wird die Drehung um die von x aufgespannte Achse, die n1 in n2 überführt. Dabei ist der Winkel zwischen n1 und n2 genau der Winkel zwischen den 2-dimensionalen Unterräumen des R2,1 , die `1 und `2 enthalten, und das ist nach Definition der Winkel zwischen `1 und `2 . Beispiel 8.9 (Hyperbolische Dreiecke). Seien A, B, C ∈ H 2 nicht kollinear (also als Vektoren im R2,1 linear unabhängig). Dann bestimmen sie drei unterschiedliche Geraden, die ein hyperbolisches Dreieck 4ABC ⊂ H 2 begrenzen. Seien A0 , B 0 , C 0 ⊂ R2,1 die zugehörigen normierten raumartigen Normalenvektoren, die also nicht in R2,1 liegen, mit hA, A0 i > 0, usw. Seien hA0 , hB 0 , hC 0 die zugehörigen Halbräume, mit hA0 = {y ∈ H 2 : hy, A0 i ≥ 0, usw. Dann kann gilt 4ABC = hA0 ∩ hB 0 ∩ hC 0 . Die Kantenlängen im Dreieck sind gegeben durch − cosh a = hB, Ci usw. − cos α = hB 0 , C 0 i usw. und die Winkel durch (Achtung: hier steht ein echter Kosinus, kein cosh!) Theorem 8.10 (Kosinussatz). Im hyperbolischen Dreieck mit Kantenlängen a, b, c und Außenbγ winkeln α b, β, b gilt der Seitenkosinussatz cos α = − cosh a + cosh b cosh c sinh b sinh c und der Winkelkosinussatz cosh a = cos α + cosh β cosh γ . sin β sin γ und entsprechend für cos β und cos γ bzw. cosh b und cosh c bei gleichzeitiger Permutation von a → b → c und α b → βb → γ b. Beweis. Analog zum sphärischen Fall, Theorem 6.10! 60 Theorem 8.11 (Dreiecksungleichungen hyperbolisch). Ein hyperbolisches Dreieck mit Kantenlängen a, b, c > 0 existiert dann und nur dann, wenn die Dreicksungleichungen gelten (also a < b + c etc.). Ein hyperbolisches Dreieck mit Innenwinkeln α, β, γ > 0 existiert dann und nur dann, wenn α + β + γ < π. Skizze. (1) Zunächst zeigen wir, dass die Gram-Matrix G = V t V für V = (A B C) von A, B, C, die ja linear unabhängig sind, Signatur (2, 1) hat — in anderen Worten, die zugehörige quadratische Form xt Gx hat diese Signatur. (2) Dann berechnen wir die Gram-Matrix explizit, als −1 − cosh c − cosh b −1 − cosh a G = − cosh c − cosh b − cosh a −1 und verwenden das Kriterium, dass sich die Signatur aus den Hauptminoren ablesen lässt: Die Dimension des negativ-definiten Teils ist die Anzahl der Vorzeichenwechsel in der Folge G0 := 1, G1 := g11 = −1, G2 = 1 − cosh2 c = − sinh c < 0. Also hat G genau dann die Signatur (2, 1), wenn die Determinante det G < 0 ist. (3) Explizite Berechnung der Determinante und Halbwinkelformeln ergeben a+b−c sinh a+b+c 2 2 und man überlegt sich, dass diese Determinante genau dann negativ ist, wenn die drei Dreiecksungleichungen gelten. (Hinweis: Es kann von den drei Dreiecksungleichungen nicht mehr als eine falsch sein, weil aus a > b + c und b > a + c folgt 0 > 2c.) (4) Und dann ganz analog für G0 , wobei die Rechnung ergibt sinh a−b+c sinh det G = −4 sinh −a+b+c 2 2 cos α−β+γ cos α+β−γ cos det G0 = −4 cos −α+β+γ 2 2 2 α+β+γ . 2 Theorem 8.12. Die hyperbolische Gruppe O+ (n, 1) operiert transitiv auf dem H n , und in jedem Punkt kann sie eine beliebige Orthonormalbasis auf eine beliebige andere abbilden. Insgesamt gilt also dim O+ (n, 1) = n + (n − 1) + · · · + 1 = 12 (n + 1). Die Gruppe O+ (n + 1) der Isometrien des n-dimensionalen hyperbolischen Raums H n hat also dieselbe Dimension wie die Gruppen O(n + 1) der Isometrien des sphärischen Raums S n und wie die euklidische Gruppe Eukl(n). 8.2 Die Modelle von Klein und Poincaré Bezeichne im Folgenden Dn := {u ∈ Rn : |u| < 1} den offenen Einheitsball im Rn , also das Innere des abgeschlossenen Einheitsballs B n . Insbesondere ist also D2 eine offene Kreisscheibe. 61 Definition 8.13 (Das Kreisscheibenmodell von Klein). Die bijektive Abbildung x1 x1 2 2 x2 7−→ xx32 κ : H −→ D x3 x3 überträgt die 2-dimensionale hyperbolische Geometrie auf die offenen Kreisscheibe D2 . Dies ergibt das Klein’sche Kreisscheibenmodell für die 2-dimensionale hyperbolische Geometrie. Die Geraden sind darin als die nicht-leeren Schnitte von D2 mit affinen Geraden des R2 gegeben. Die Gruppenaktion der O+ (2, 1) sowie Winkel und Abstände werden durch κ auf das Modell übertragen, können/müssen also mit Hilfe der Umkehrabbildung u1 1 u1 −1 2 2 u2 7−→ κ : D −→ H u2 1 − u21 − u22 1 übertragen, zum Beispiel durch d(u, u0 ) := d(κ−1 (u), κ−1 (u0 )). BILD 8.13 Definition 8.14 (parallel, ultraparallel). Zwei Geraden `1 , `2 schneiden sich, wenn die Normalenvektoren |hn1 , n2 i| < 1 erfüllen. Sie heißen parallel, wenn |hn1 , n2 i| = 1 gilt, was einem “Schnittpunkt im Unendlichen” (also auf dem Rand des Kleinschen Kreisscheibenmodells) entspricht. In diesem Fall schneiden sich die zugehörigen 2-dimensionalen Unterräume U1 , U2 ⊂ R2,1 im Lichtkegel. Sie heißen ultraparallel, wenn |hn1 , n2 i| > 1 gilt, was einem “Schnittpunkt jenseits des Unendlichen” (also außerhalb des Kleinschen Kreisscheibenmodells) entspricht. In diesem Fall schneiden sich die zugehörigen 2-dimensionalen Unterräume U1 , U2 ⊂ R2,1 in einem raumartigen Untervektorraum. In der Zeichnung schneiden sich `1 und `2 , `2 und `3 sind parallel, `1 und `3 sind ultraparallel, `3 `2 `1 Proposition 8.15. Ist ` ⊂ H 2 eine Gerade und x ∈ / `, so gibt es zwei verschiedene Geraden und unendlich viele ultraparallele Geraden zu ` durch x. Das Klein-Modell für den hyperbolischen Raum “funktioniert” ganz genauso in höheren Dimensionen: Die bijektive Abbildung x n n 1 κ : H −→ D 7−→ xn+1 x xn+1 62 überträgt die n-dimensionale hyperbolische Geometrie auf den offenen Ball Dn ; die Umkehrabbildung ist gegeben durch u −1 n n 1 κ : D −→ H u 7−→ 1−|u|2 . 1 Das Klein-Modell hat die besondere Eigenschaft, dass die Geraden des Modells genau die Geraden des Rn sind (die den offenen Ball Dn schneiden). Weiter kann man das Modell mit dem Inneren der Sphäre S n ⊂ Rn+1 ⊂ RPn+1 identifizieren, und daran sehen, dass die Geometrie auf dem Rand des Klein-Modells genau wieder die Möbiusgeometrie Möb(n) ist. Das soll hier aber nicht mehr ausgeführt werden. Das Klein-Modell ist aber nur eines von mehreren Modellen für die n-dimensionale hyperbolische Geometrie, die alle ihre interessanten Aspekte haben, und daher ein intensiveres Studium wert wären. Wir geben hier aus Zeitmangel nur noch ein solches Modell an. Definition 8.16 (Das Kreisscheibenmodell von Poincaré). Die bijektive Abbildung x1 x1 2 2 1 x2 7−→ π : H −→ D x3 +1 x2 x3 überträgt die 2-dimensionale hyperbolische Geometrie auf die offenen Kreisscheibe D2 . Dies ergibt das Poincaré’sche Kreisscheibenmodell für die 2-dimensionale hyperbolische Geometrie. Die Geraden sind darin als die Schnitte von D2 mit Kreisen gegeben, die den Rand S 1 = ∂D2 der Kreisscheibe senkrecht schneiden. Die Gruppenaktion der O+ (2, 1) sowie Winkel und Abstände werden durch π auf das Modell übertragen, können/müssen also mit Hilfe der Umkehrabbildung 2u1 u1 2u2 π −1 : D2 −→ H 2 7−→ 1−u12 −u2 1 2 u2 2 2 1 + u1 + u2 übertragen, zum Beispiel durch d(u, u0 ) := d(π −1 (u), π −1 (u0 )). Auch das Poincaré-Modell kann analog für den n-dimensionalen Fall konstruiert werden: Hn x π(x) O S 63 Dn Theorem 8.17 (Geraden und Unterräume des Poincaré-Modells). Die stereographische Projektion π : H n → Dn ⊂ Rn bildet Schnitte von H n mit linearen Unterräumen des Rn+1 auf Schnitte von Dn mit Sphären und mit linearen Unterräumen ab, die senkrecht auf dem Rand S n−1 = ∂Dn des Modells stehen. (Die linearen Unterräume gehen also durch den Mittelpunkt von Dn .) Theorem 8.18 (Das Poincaré-Modell ist konform). Das Poincaré-Modell ist konform: Winkel sind euklidische Winkel! Die Metrik ist im Poincaré-Modell zum Beispiel dadurch gegeben, dass d(0, y) = 21 ln 1 + |y| . 1 − |y| Proposition 8.19 (ideale Dreiecke). Alle “idealen” Dreiecke in H 2 (also Dreiecke, deren Seiten parallel sind, und deren Ecken auf dem Rand des Modells “im Unendlichen” liegen, sind kongruent. Sie haben alle die Fläche π. Proposition 8.20 (hyperbolische Dreiecksfläche). Die Fläche eines hyperbolischen Dreiecks mit den Winkeln α, β, γ ist A(4ABC) = π − α − β − γ. Alle endlichen hyperbolischen Dreiecke haben also eine Fläche, die kleiner als π ist. Man überlege sich dazu, dass beim Zerschneiden eines Dreiecks in zwei Dreiecke (mit einem Schnitt durch einen Eckpunkt) sich die Größe π − α − β − γ additiv verhält. Man überlegt sich genauso, dass in der hyperbolischen Ebene regelmäßige n-Ecke beliebig kleine Winkel haben — im Grenzfall von “idealen” regelmäßigen n-Ecken sind die Winkel gleich 0. Andererseits sind die Winkel immer kleiner als die Winkel von regelmäßigen euklidischen n-Ecken. Zum Beispiel hat ein regelmäßiges euklidisches Fünfeck Winkel gleich 3π/5 = 108◦ , regelmäßige hyperbolische Fünfecke haben beliebige Winkel im offenen Intervall (0◦ , 108◦ ). Genauso existieren hyperbolische Dreiecke mit beliebigen Winkeln 0 < α, β, γ für α + β + γ < π. Experimentiert man nun mit Spiegelungen an den Kanten von solchen Dreiecken, so ergibt dies für besondere Winkeln Pflasterungen der hyperbolischen Ebene mit Dreiecken, regelmäßigen n-Ecken, usw.: wie man sie zum Beispiel aus Graphiken von Maurits Cornelis Escher1 kennen kann. Literatur [1] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School, 2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/ geometry1_ws07.pdf. 1 Holländischer Graphiker, 1898–1972, http://en.wikipedia.org/wiki/M._C._Escher 64 9 9.1 Perspektiven der Geometrie Gruppentheorie Nach Felix Klein: die Gruppe bestimmt die Geometrie Bespiel: Euklidische Geometrie der Ebene: Die Elemente der Ordnung 2 sind genau die Geradenspiegelungen und die Punktspiegelungen – wobei die Punktspiegelungen die Elemente sind, die selbst Quadrate sind. Also kann man die Punkte und die Geraden der Ebene eindeutig mit Gruppenelementen identifizieren. Analog kann man versuchen, die Gruppen von bekannten Geometrien auch algebraisch zu verstehen, und auch interessante Gruppen geometrisch zu interpretieren. Dies bietet sich bei Liegruppen an (die glatte Mannigfaltigkeiten sind; benannt nach Sophus Lie), wird aber zum Beispiel auch für endliche Gruppen/Geometrien studiert. 9.2 Differenzialgeometrie Geschlossene Flächen (technisch: orientierbare, zusammenhängende, kompakte 2-dimensionale Mannigfaltigkeiten ohne Rand) kann man klassifizieren — und dann beweisen, dass jede solche Mannigfaltigkeit eine Metrik kompakter Krümmung hat, also vollständig als Raum mit konstanter Krümmung modelliert werden kann: die Sphäre S 2 als Raum positiver Krümmung 1 und sphärischer Geometrie, der Torus (S 1 )2 als flacher Raum von konstanter Krümmung 0 und euklischer Geometrie, sowie die Flächen vom Geschlecht g > 1 als Räume konstanter negativer Krümmung mit hyperbolsicher Geometrie. Diese Diskussion ist klassisch, man kennt sie in der Funktionentheorie als Uniformisierung, ein wesentlicher Schritt ist von Paul Koebe. Für geschlossene Mannigfaltigkeiten der Dimension 3 sind erst mit dem Beweis der Geometrisierungsvermutung von William Thurston in diesem Jahrtausend durch Grigrij Perelman ein entsprechendes Resultat: es besagt grob, dass man jede Mannigfaltigkeit aufschneiden kann in Teile, die wiederum mit “Modellgeometrien” versehen werden können — dazu gehören die sphärische, flache und hyperbolische Geometrie wie auch einige andere. Achtung: Sehr schwierig. 9.3 Konforme Abbildungen Kreispackungen in der Ebene sind ein nur scheinbar elementares Thema, das das Studium lohnt. So kann der Riemannsche Abbildungssatz aus der Funktionentheorie (“jedes einfachzusammenhängende Gebiet in der komplexen Ebene kann mit einer komplex-differenzierbaren, also konformen, Abbildung auf eine Kreisscheibe abgebildet werden”) bewiesen werden, indem man erst den Kreispackungssatz beweist, und diesen dann für Approximationen nutzt. Die Theorie der ebenen Kreispackungen ist also sehr reichhaltig, während Kugelpackungen im Höherdimensionalen viel weniger verstanden sind. Es gibt höherdimensional eben auch keine lokal-konformen Abbildungen, die nicht global konform wären — also nur die Möbiustransformationen. Referenz: Stephenson [2] 65 9.4 Kugelpackungen Betrachtet man Packungen von gleichgroßen Kugeln, so ist die Situation in der Ebene recht einfach: Eine Kreisscheibe vom Radius 1 kann gleichzeitig 6 weitere Kreisscheiben vom selben Radius berühren, die sich nicht überlappen. Man sagt, dass die Kusszahl in der Ebene, also Dimension d = 2, gleich κ(2) = 6 ist. Genauso ist die dichteste Kugelpackung in der Ebene die offensichtliche, in der die Kreisscheiben zeilenweise angeordnet werden. Wir diskutieren hier nur kurz die Kusszahlen in höheren Dimensionen: Man weiß, dass κ(3) = 12 ist — das ist als Newton–Gregory-Problem bekannt — sowie, dass κ(4) = 24 — das wurde erst kürzlich bewiesen, zuerst von Oleg Musin, sowie, dass κ(8) = 240 und κ(24) = 196.560. Es gibt also in Dimensionen 8 und 24 ganz besondere geometrische Konstellationen, die wieder von anderen Theorien abhängen: So verwendet man ◦ in Dimension 4 die Ecken des 24-Zells, ein besonders interessantes 4-dimensionales Polytop, das mit der Liegruppe F4 zusammenhängt; ◦ in Dimension 8 das Wurzelgitter der Liegruppe E8 , die in der Klassifikation der einfachen Liegruppen als besonders interessante Struktur auftaucht; ◦ in Dimension 24 das sogenannte Leech-Gitter, das man sowohl kodierungstheoretisch studieren kann (mit dem Golay-Kode der Länge 24), als auch graphentheoretisch aus dem Graphen des Ikosaeders gewinnen kann. (Siehe [1]!) Moral: Mit dem Studium der wichtigsten Geometrien haben wir die Bühne zur Verfügung, auf der viele spannende Strukturen existieren — deren Studium sich lohnt . . . Literatur [1] Martin Aigner. Gitter, Codes und Graphen. Lecture Notes, FU Berlin, 1994/95. [2] Kenneth Stephenson. Introduction to circle packing. The theory of discrete analytic functions. Cambridge University Press, 2005. 66