Zielsetzung: Zusammenfassung: Realisierung der Bildübertragung
Werbung

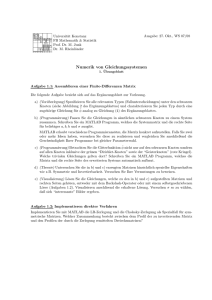
Institut für Automatisierungstechnik – Professur für Prozessdatenverarbeitung und Systemanalyse Univ.-Prof. Dr.-Ing Klaus Krüger Helmut-Schmidt-Universität Kapitän zur See Qingfu Kong Betreuer: Dipl.-Ing. Andrey Galochkin, Dipl.-Ing Dietrich Jeschke Realisierung der Bildübertragung und der Motoransteuerung für den Laborversuch „Autonomes Fahren“ Zielsetzung: Diese Studienarbeit befasst sich mit autonomem Fahren. Sie betrifft einen Versuch, der zu Schauund Lehrzwecken konzipiert wurde. Die Aufgabe der Arbeit ist, das autonome Fahren mit Hilfe von neuronalen Netzen am Beispiel einer Spielzeug-Rennbahn der Marke „Carrera“ zu realisieren. Ziel ist es, dass ein Auto mit den am besten geeigneten Geschwindigkeiten und ausreichender Sicherheit die ganze Rennbahn unabhängig von deren Aufbau durchfahren kann. Zusammenfassung: Die Arbeit kann in zwei Aufgabenfelder eingeteilt werden. Das erste Aufgabenfeld ist die Übertragung des Kamerabildes vom Fahrzeug auf dem Zielrechner. Das zweite Aufgabenfeld beinhaltet das Ansteuern des Fahrzeugmotors vom Zielrechner aus. Informationsbeschaffung Funkkamera und Sender Fahrbahn + - Motoransteuerung Informationsübertragung Verstärker Empfänger Ausgangsport der DAQ-Karte Informationsverarbeitung Advantech PCI-1711 DAQ-Karte Matlab Matlab DAQ Toolbox Image Acquisition Toolbox MATLAB Hauppauge WinTv Capture Videokarte Rechner Abbildung 1: Versuchsaufbau Beim Entwurf eines Regelungssystems spielt es eine sehr wichtige Rolle, die Eigenschaften des zu regelnden Objekts zu analysieren. Nach der Darstellung des zu regelnden Objekts – einer Spielzeugrennbahn der Marke „Carrera“ – wird eine Funkkamera Euro Tech LU811 Set als Sensor zur Umgebungserfassung für den Versuch ausgewählt. Um die analogen Signale aus dem Empfänger in digitale Signale umzuwandeln und zum Rechner zu übertragen, wird die Videokarte Hauppauge WinTV Capture ausgesucht und zwischen dem Empfänger und dem Rechner verwendet. Mit Hilfe der ausgewählten Programmierumgebung MATLAB werden die Bilder durch die Image-AcquisitionToolbox im Rechner erfolgreich aufgenommen und gespeichert. Für das Ansteuern des Fahrzeugmotors vom Zielrechner aus wird das Steuersignal zunächst über die Programmierumgebung MATLAB\Data-Acquisition-Toolbox eingestellt. Um dieses digitale Steuersignal in analoges Signal umzuwandeln, wird eine PCI-1711 DAQ-Karte verwendet. Danach wird ein Verstärker für die Verstärkung der Spannung und zur Realisierung des erforderlichen Stroms eingesetzt. Dadurch kann der Gleichstrom-Motor des Wagens erfolgreich vom Zielrechner angesteuert werden. Ausblick: Die Tests zeigen, dass die Entwürfe und Realisierungsmethode des Versuches grundsätzlich korrekt sind. Aber es sind auch folgende Herausforderungen zu betrachten, zu denen weitere Untersuchungen erforderlich sind. (1) Einige Bilder enthalten nicht genügend Information über den Fahrbahnverlauf. Um dieses Problem lösen zu können, müssen andere flankierende Maßnahmen verwendet werden. Das Anbringen einer farbigen Bande entlang der ganzen Rennbahn wäre eine Lösungsmethode. (2) Die Geschwindigkeit des Wagens erfassen. Die Regelungsstrategie des Versuches ist es, geeignete Geschwindigkeiten entsprechend der verschiedenen Situationen der Rennbahn vorzugeben. Deshalb ist die Geschwindigkeit des Wagens ein sehr wichtiger Parameter. Aber bei der bereits aufgebauten Testanlage ist es sehr schwer, die genaue Geschwindigkeit zu ermitteln. Um dieses Problem zu lösen, gibt es einige Möglichkeiten, z. B. einen zusätzlichen Drehzahlmesser auf dem Wagen zu montieren, durch die Methode der Bildverarbeitung die Geschwindigkeit zu bestimmen oder durch die Analyse von Strom und Spannung am Motor die Geschwindigkeit zu berechnen. Die Frage, welche Möglichkeit ist für den Versuch am günstigsten ist, muss durch weitere Untersuchungen zu beantwortet werden. Zusammenfassend lässt sich sagen, dass die Aufgaben der Studienarbeit erfolgreich geschafft wurden. Aber um ein autonomes Fahren beim Versuch zu realisieren, müssen in weiterer Arbeit noch einige wesentliche Herausforderungen gelöst werden.