Elementare und Analytische Geometrie
Werbung

Mathematisches Institut
Elementare und Analytische Geometrie
Skript zur gleichnamigen Vorlesung von Professor Herbert
Koch im Sommersemester 2012
Clemens Kienzler, Herbert Koch
Stand vom 6. Juli 2012.
Die Vorlesung ist der zweite Teil des Moduls Elemente der Mathematik.
Inhaltsverzeichnis
1 Einführung
1.1 Organisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Literatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Grundlagen nach Euklid und Hilbert
2.1 I. Axiome der Inzidenz . . . . . . . . . . . . . . . . . . . .
2.2 II. Axiome der Anordnung . . . . . . . . . . . . . . . . . .
2.3 III. Axiome der Kongruenz . . . . . . . . . . . . . . . . .
2.4 IV: Das Parallelenaxiom . . . . . . . . . . . . . . . . . . .
2.5 Streckenarithmetik . . . . . . . . . . . . . . . . . . . . . .
2.6 Ähnlichkeit . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7 V: Archimedisches Axiom und Axiom der Vollständigkeit
2.8 Kongruenz- und Ähnlichkeitsabbildungen . . . . . . . . .
2.9 Analytische Geometrie . . . . . . . . . . . . . . . . . . . .
2.10 Der Flächeninhalt . . . . . . . . . . . . . . . . . . . . . .
3 Elementargeometrische Figuren
3.1 Das Dreieck . . . . . . . . . . . . . . . . . . . . . .
3.2 Kreise . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Das Poincaré-Modell der hyperbolischen Ebene . .
3.4 Winkeldefekt und Flächeninhalt . . . . . . . . . . .
3.5 Eine analytische Behandlung des Poincaré-Modells
3.6 Kegelschnitte und Quadriken . . . . . . . . . . . .
3.7 Regelmässige Vielecke und komplexe Zahlen . . . .
3.8 Vielecke . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
3
3
.
.
.
.
.
.
.
.
.
.
3
3
4
8
14
18
22
23
26
27
28
.
.
.
.
.
.
.
.
30
30
38
47
53
54
57
74
78
Einführung
1. Vorlesung am 3. April 2012
1 Einführung
Unter den ersten Quellen sind der ägyptische Papyrus Rhind und der ägyptische Papyrus Moskau, die Aufgaben zur Berechnung von Flächen von Rechtecken, Dreiecken und Trapezen und
dem Volumen eines Pyramidenstumpfes enthalten. Motive kamen sicher vom Vermessen diverser
Objekte, der Verwaltung, der Konstruktion der Pyramiden und der Darstellung geometrischer
Objekte.
Beeindruckend ist die Vermessung des Erdumfangs durch Eratosthenes (um 275 - 194 v Chr. ).
In Euklids (360 - 280 v Chr. ) Elementen findet sich der Versuch, den abstrahierten mathematischgeometrischen Inhalt systematisch und deduktiv zu ordnen.
Hilbert [4] greift die Frage nach den Grundlagen der Geometrie wieder auf und formuliert ein
Axiomensystem für die Geometrie, auf das wir zunächst aufbauen. Wie in der Analysis versucht
das Axiomensystem die mathematische Struktur unabhängig von Anschauung und inhaltlichen
Vorstellungen herauszuarbeiten. Dadurch wird eine belastbare Argumentation möglich. Interessanterweise ist die mathematische Struktur schon von Dreiecken ungewöhnlich reichhaltig - so
gibt es viele Aufgaben der Mathematikolympiade, die Fragen nach Dreiecken stellen. Im Kapitel
über Elementargeometrie werden wir derartigen Fragen nachgehen.
Wie auch in anderen Bereichen der Mathematik ergaben sich aus der Strukturorientierung sehr
dynamische Entwicklungen, die auch zeigen, das die Formalisierung nicht zu einer Vernachlässigung der inhaltlichen Vorstellungen geführt hat.
So erkannte man im 18. Jahrhundert, dass das Parallelenaxiom unabhängig von den übrigen
Axiomen war. In der Vorlesung werden wir die auf Lobatschewski zurückgehende hyperbolische
Geometrie kennenlernen.
Die hyperbolische Geometrie ist der Modellfall eines Raumes mit negative Krümmung. Riemann
(1826-1866) entwickelte die Differentialgeometrie mit dem Krümmungstensor als wesentlicher
Größe.
Um die Jahrhundertwende gab es in der Physik nach großen Erfolgen grundsätzliche offene Fragen, wie z.B. nach der Bedeutung der Geschwindigkeit elektromagnetischer Wellen. Einstein
interpretierte die Graviationskraft als eine geometrische Größe - der Kern der allgemeinen Relativitätstheorie.
Inzwischen ist die allgemeine Relativitätstheorie selbst für alltägliche technische Anwendungen
relevant: Eine Ortsbestimmung mittels GPS erfordert eine so genaue Zeitmessung, dass die
Auswirkung der Masse der Erde auf die Geschwindigkeit der Uhr berücksichtigt werden muß.
Inhalte der Vorlesung sind Grundlagen der Geometrie, Elementargeometrie (“elementar” bezieht
sich auf den verwendeten mathematischen Apparat, es wäre völlig falsch “elementar” mit “trivial”
gleichzusetzen), analytische Geometrie (in der die Interpretation der Ebene und des Raumes als 2
bzw 3 dimensionaler Vektorraum im Vordergrund steht) und Symmetrien und Gruppen (meistens
Kongruenzabbildungen).
2
Grundlagen nach Euklid und Hilbert
Mathematik betreiben heißt immer auch Probleme lösen. Dieser Aspekt wird vor allem in den
Übungsgruppen und den Projekten eine wichtige Rolle spielen.
1.1 Organisation
Die Vorlesung ist jeweils Dienstags von 16-18 Uhr. Die Übungen sind Donnerstags zum selben
Zeitpunkt. Die Klausur findet voraussichtlich am 7.7. statt. Voraussetzung ist eine erfolgreiche
Teilnahme an den Übungsgruppen, was 50% der Punkte der Hausaufgaben und eine erfolgreiche
Bearbeitung eines Projekts, jeweils in beiden Semestern, einschließt.
1.2 Literatur
Agricola [1], Hilbert [5], Hilbert und Cohn-Vossen [5], Schupp [7] und Struve [8].
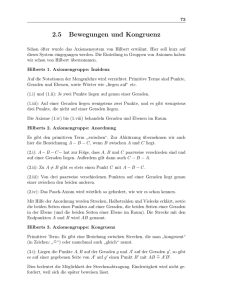
2 Grundlagen nach Euklid und Hilbert
Wir betrachten eine Menge P , deren Elemente wir “Punkte” nennen, eine Menge G , deren Elemente wir “Geraden” nennen, und eine Menge E , deren Elemente wir “Ebenen” nennen. Punkte
bezeichnen wir typischerweise mit großen Buchstaben, Geraden mit kleinen Buchstaben, und
Ebenen mit griechischen Buchstaben.
2.1 I. Axiome der Inzidenz
Wir betrachten Inzidenzen (enthalten sein, liegen auf/ liegen in)
IP G ⊂ P × G , IP E ⊂ P × E , IGE ⊂ G × E
und sagen z.B. , A liegt auf a oder a enthält A, falls ( A, a) ∈ IP G . Wir fordern dass aus ( A, a) ∈
IP G ⊂ P × G und ( a, α) ∈ IGE ⊂ G × E folgt: ( A, α) ∈ IP E ⊂ P × E . Anders ausgedrückt: Liegt
A auf a und a in α, so liegt auch A in α.
I.1
Jede Gerade enthält mindestens zwei Punkte. Zu je zwei verschiedenen Punkten
existiert genau eine Gerade, die diese zwei Punkte enthält. Es gibt drei Punkte, die
nicht auf einer Geraden liegen.
I.2
Jede Ebene enthält mindestens drei nicht auf einer Geraden liegende Punkte. Zu
drei nicht auf einer Geraden liegenden Punkten gibt es genau eine Ebene, die diese
enthält. Es gibt vier Punkte, die nicht in einer Ebene liegen.
I.3
Wenn zwei verschiedene Punkte in einer Ebene liegen, so liegt auch die Gerade, die
durch diese Punkte bestimmt ist, in der Ebene. Wenn zwei Ebenen einen gemeinsamen Punkt enthalten, so enthalten sie auch einen zweiten gemeinsamen Punkt.
1 Satz Zwei verschiedene Geraden haben einen oder keinen Punkt gemeinsam. Zwei Ebenen
haben keinen Punkt oder eine Gerade gemeinsam. Eine Ebene und eine nicht in ihr enthaltenen
Gerade haben keinen oder einen Punkt gemeinsam.
3
Grundlagen nach Euklid und Hilbert
2 Satz Zu einer Geraden und einem nicht auf ihr liegenden Punkt gibt es genau eine Ebene, die
beide enthält. Zu zwei Geraden mit genau einem gemeinsamen Punkt gibt es genau eine Ebene,
die die Geraden enthält.
Bemerkung: Der vierdimensionale Raum genügt diesen Axiomen nicht.
2.2 II. Axiome der Anordnung
Die Anordnung wird beschrieben durch eine Menge
A ⊂ P ×P ×P
von Tripeln ( A, B, C ) von Punkten, die paarweise verschieden sind und jeweils auf einer Geraden
liegen. Ist ( A, B, C ) ∈ A so sagen wir “B liegt zwischen A und C”. Die Strecke AB ist die Menge
aller Punkte, die zwischen A und B liegen. A und B heißen Endpunkte und sind selbst nicht
Element von AB.
II.1
Liegt B zwischen A und C, so liegt B auch zwischen C und A.
II.2
Zu zwei verschiedenen Punkten A und B gibt es einen Punkt, der zwischen A und
B liegt, und einen Punkt C, so dass B zwischen A und C liegt.
II.3
Liegen die drei paarweise verschiedenen Punkte A, B, C auf der Geraden g, so liegt
genau einer der drei Punkte zwischen den beiden anderen Punkten.
II.4
(Pasch) Seien A, B, C drei nicht auf einer Gerade liegende Punkte, a eine Gerade
in der zu A, B, C gehörenden Ebene, die keinen der drei Punkte enthält, aber einen
Punkt aus AB. Dann enthält a entweder einen Punkt aus BC oder einen Punkt aus
CA, aber nicht beides.
3 Lemma Zwischen je zwei verschiedenen Punkten einer Geraden gibt es unendlich viele
Punkte auf der Geraden.
4 Satz Seien vier paarweise verschiedene Punkte auf der Geraden g gegeben. Dann können sie
so mit A, B, C, D bezeichnet werden, dass B sowohl zwischen A und C als auch zwischen A und
D liegt, und C sowohl zwischen B und D als auch zwischen A und D liegt.
Siehe Moore [6] und [2].
Beweis:
Behauptung: Liegt B zwischen A und C, sowie C zwischen A und D, so liegt C auch zwischen B
und D.
Wir beweisen die Behauptung.
Es liege B zwischen A und C, und C zwischen A und D. Dann folgt
1) D liegt nicht zwischen B und C.
4
Grundlagen nach Euklid und Hilbert
2) B liegt zwischen A und D.
3) B liegt nicht zwischen C und D.
Daraus folgt die Behauptung: einer der drei Punkte B, C, D liegt nach Axiom II.3 in der Mitte.
Nach der ersten Aussage ist das nicht D, nach der dritten Aussage auch nicht B, also liegt C
zwischen B und D.
Beweis der drei Aussagen: Sei E ein Punkt, der nicht auf der Geraden g liegt (geht wegen Axiom
I.1). Wir wählen einen Punkt F aus CE und betrachten das Dreieck BCE und die Gerade a,
die A und F enthält. Sie schneidet EB nach Axiom II.4, und zwar in einem Punkt G auf AF
(Anwendung von II.4 auf ACF). In BC ist das nicht möglich, da laut Voraussetzung B zwischen
A und C.
Wir führen die Annahme “D liegt zwischen B und C” zu einem Widerspruch. Denn dann würde
DF sowohl BC wie auch CE schneiden, und es würde selbst von CG geschnitten werden, sagen
wir in einem Punkt H zwischen F und D. Dann scheidet CH (da C zwischen A und D liegt) die
drei Seiten des Dreiecks ADF jeweils in inneren Punkten - ein Widerspruch zu II.4.
E
F
A
G
H
B
D
C
Der Punkt C kann hier nicht geometrisch korrekt gezeichnet werden, da die Skizze eine unmögliche Konfiguration zeigt.
Wir beweisen die zweite Aussage. Nach der ersten kann A nicht zwischen B und D liegen (C
zwischen D und A, A zwischen D und B, B zwischen A und C: Vertauschen den Buchstaben
unmöglich nach der ersten Aussage). Wäre D zwischen A und B, so folgt nach der ersten Aussage,
dass keiner der drei Punkte zwischen den anderen beiden liegen kann - ein Widerspruch. Also
liegt B zwischen A und D.
Wir beweisen die dritte Aussage. Sei E ein Punkt nicht auf g. Wir wählen einen Punkt F auf EC.
Da F zwischen E und C liegt, und C zwischen A und D schneidet die durch A und F bestimmte
Gerade das Dreieck ECD in einem Punkt G zwischen E und D. Nun liegt F zwischen A und
G. Da B zwischen A und C liegt und F zwischen AG schneidet die Gerade durch B und G CF
in einem Punkt H. Da auch F zwischen C und E liegt, liegt nach der bewiesenen Aussage H
zwischen C und E. Falls B zwischen C und D liegt, so schneidet die Gerade durch B und H alle
Seiten des Dreiecks DCE in inneren Punkten - ein Widerspruch zu II.4.
5
Grundlagen nach Euklid und Hilbert
E
G
F
H
A
B
C
D
Beweis des Satzes.
Der Satz folgt aus den folgenden Aussagen:
i) Falls B zwischen A und C und C zwischen B und D, so sind B und C zwischen A und D.
ii) Falls C zwischen A und D und zwischen B und D liegt, so liegt weder C noch D zwischen
A und B. A liegt genau dann zwischen B und C wenn A zwischen B und D liegt.
iii) Falls B und C zwischen A und D liegen, so liegt weder A noch D zwischen B und C. B liegt
genau dann zwischen A und C wenn C zwischen B und D liegt.
Diese Aussagen wiederum folgen aus der Behauptung. Diesen Teil des Beweises führe ich nicht
aus.
Die Punkte, die auf g liegen, können nun anhand eines Punktes in zwei Teilmengen auf der einen
bzw anderen Seite dieses Punktes geteilt werden. Das folgt aus Satz 4 und ist der Inhalt des
folgenden Lemmas.
5 Lemma
Sei g eine Gerade und O und A zwei verschiedene Punkte auf g. Wir definieren
B = B | B liegt auf g, B liegt zwischen O und A oder B = A
oder A liegt zwischen O und B
und
C := {C | C liegt auf g} r ({O} ∪ B).
Sind die Punkte D und E beide Element von B , oder sind beide Element von C , so ist O 6∈ DE.
Ist D ∈ B und E ∈ C so ist O ∈ DE.
6
Grundlagen nach Euklid und Hilbert
2. Vorlesung am 10. April 2012
6 Satz Jede Gerade a auf einer Ebene α trennt die nicht auf ihr liegenden Punkte von α in
genau zwei nichtleere Teilmengen, so dass die Strecke AB in einer der Teilmengen liegt, falls
A und B in ihr liegen, und AB einen Punkt von a enthält, wenn A und B in verschiedenen
Teilmengen liegen.
Beweis:
Sei E ein Punkt, der nicht auf der Geraden a liegt. Sei A ein Punkt auf der Geraden, und F ein
Punkt auf der durch E und A definierten Geraden, so dass A zwischen E und F liegt.
Zu zeigen ist:
Ist B ein Punkt, der nicht auf der Geraden liegt, so enthält genau eine der Strecken BE und BF
einen Punkt der Geraden g.
Dadurch teilen wir die Punkte in zwei Klassen ein. Da diese Aussage für jede Konfiguration gilt
erhalten wir die Aussage: Seien C und D nicht auf g liegende Punkte. Falls keine der Strecken
CE und DE einen Punkt auf g enthalten betrachten wir das Dreieck CDF. Die Strecken CF und
DF enthalten jeweils einen Punkt von g nach der Behauptung, also enthält die Strecke CD nach
Axiom II.4 keinen Punkt von g.
Enhält CE einen Punkt von g, DE aber nicht, so enthält mit der gleichen Argumentation CD
einen Punkt von g.
Beweis der Behauptung:
Wir betrachten das Dreieck BEF. Die Gerade g schneidet einen Inneren Punkt von EF, also
schneidet sie genau eine der Strecken BE oder BF. Daraus folgt die Aussage.
Ein Streckenzug ist ein System von Strecken A1 A2 , A2 A3 bis An−1 An . Auch die Punkte Ai sind
Element des Streckenzugs. Ein Streckenzug heißt Polygon, falls An = A1 . Die Punkte Ai heißen
Ecken des Polygons. Ein Polygon heißt einfach, falls alle Ecken verschieden sind, keine Strecke
eine Ecke enthält, und keine zwei Strecken gemeinsame Punkte enthalten.
7 Satz Jedes einfache Polygon in einer Ebene teilt die Ebene in ein Inneres I und ein Äußeres A, so daß jeder Streckenzug von A ∈ I nach B ∈ A mindestens einen Punkt mit dem
Polygon gemeinsam hat. Liegen A und B beide im Inneren oder beide im Äußeren, so existiert
ein Streckenzug von A nach B, der keinen gemeinsamen Punkt mit dem Polygon hat. Es gibt
eine Gerade, deren Punkte alle im Äußeren enthalten sind. Eine Gerade, deren Punkte alle im
Inneren enthalten sind, gibt es nicht.
Hilbert schreibt: Mit Zuhilfenahme des Satzes 6 gelangen wir ohne erhebliche Schwierigkeiten
zu dem Satz 7. Ich finde den Beweis nicht einfach. Eine Referenz ist [2].
7
Grundlagen nach Euklid und Hilbert
2.3 III. Axiome der Kongruenz
Die Kongruenz wird beschrieben durch eine Äquivalenzrelation von Strecken bzw einer Teilmenge
K ⊂ (P × P ) × (P × P ) von Quadrupeln von Punkten. Wir sagen AB ist kongruent zu A0 B0
falls ( A, B, A0 , B0 ) ∈ K. Wir schreiben dann AB ≡ A0 B0 .
III.1
Sind A, B zwei verschiedene Punkte auf der Geraden a und A0 ein Punkt auf einer
Geraden a0 , dann gibt es genau einen Punkt B0 auf einer gegebenen Seite von a0 , so
dass AB kongruent ist zu A0 B0 . Es gilt stets, dass AB kongruent zu AB und zu BA
ist.
III.2
Ist AB kongruent zu A0 B0 und A0 B0 kongruent zu A00 B00 so ist AB kongruent zu
A00 B00 .
III.3
Seien AB und BC zwei Strecken ohne gemeinsame Punkte auf a, A0 B0 und B0 C 0 zwei
Strecken ohne gemeinsame Punkte auf a0 . Sind AB und A0 B0 sowie BC und B0 C 0
kongruent, so sind auch AC und A0 C 0 kongruent.
Sei α eine Ebene, O ein Punkt auf α und h und k von O ausgehende Halbstrahlen, die nicht
auf einer Geraden liegen. (Deren Existenz kann mit Hilfe der bisherigen Axiome sichergestellt
werden.) Dieses System bezeichen wir mit Winkel ∠(h, k ) = ∠(k, h). O heißt Scheitel, h und k
heißen Schenkel des Winkels.
Die Halbstrahlen h und k teilen die Ebene in zwei Teile analog zu Satz 7.
Eine Komponente ist dadurch ausgezeichnet, dass jede Strecke, die zwei Punkte dieser Komponente verbindet, ganz in dieser Komponenten liegt. Diese Komponente nennen wir das Innere
des Winkels.
Die Teilmenge
KW
von Paaren von Winkeln beschreibt kongruente Winkel. Sind A,B, C Punkte, die nicht auf einer
Gerade liegen, so bezeichnen wir mit ∠ ABC den offensichtlichen Winkel mit Scheitel B.
III.4
Es sei ∠(h, k ) ein Winkel in der Ebene α und a0 eine Gerade in der Ebene α0 . Sei
h0 ein Halbstrahl auf a0 , der von einem Punkt O0 ausgeht. Wir wählen eine Seite
von a0 in α0 aus. Dann gibt es in α0 genau einen Halbstrahl k0 ausgehend von O0 auf
der angegebenen Seite, so dass ∠(h, k ) ≡ ∠(h0 , k0 ). Jeder Winkel ist zu sich selbst
kongruent.
III.5
Ist ∠(h, k ) kongruent zu ∠(h0 , k0 ) und ∠(h0 , k0 ) zu ∠(h00 , k00 ), so ist ∠(h, k ) kongruent
zu ∠(h00 , k00 ).
III.6
Gelten für die Dreiecke ABC und A0 B0 C 0 die Kongruenzen
AB ≡ A0 B0 ,
AC ≡ A0 C 0 ,
∠ BAC ≡ ∠ B0 A0 C 0
so gilt auch
∠ ABC = ∠ A0 B0 C 0
und ∠ ACB ≡ ∠ A0 C 0 B0 )
8
Grundlagen nach Euklid und Hilbert
8 Bemerkung
1) Ist AB kongruent zu A0 B0 , so ist A0 B0 kongruent zu AB.
2) Zwei Winkel, die den Scheitel und einen Schenkel gemein haben, und deren nicht gemeinsame Schenkel eine Gerade bilden, heißen Nebenwinkel. Zwei Winkel mit gemeinsamen
Scheitel, deren Schenkel je eine Gerade bilden, heißen Scheitelwinkel. Ein Winkel, der zu
einem seiner Nebenwinkel kongruent ist, heißt rechter Winkel.
3) Zwei Dreiecke ABC und A0 B0 C 0 heißen kongruent, wenn
AB ≡ A0 B0 ,
BC ≡ B0 C 0 ,
AC ≡ A0 C 0
und
∠ A ≡ A0 ,
∠ B ≡ ∠ B0
∠C ≡ C 0 .
Hier bezeichnet ∠ A den Winkel mit Scheitel A und den durch AB und AC definierten
Schenkeln.
4) Erster Kongruenzsatz für Dreiecke. Wenn für zwei Dreiecke die Kongruenzen
AB = A0 B0
AC ≡ A0 C 0
∠ A ≡ ∠ A0
gelten so sind die Dreiecke kongruent.
Beweis: Nach Axiom III.6 sind die entsprechenden Winkel kongruent. Es bleibt zu zeigen:
BC ≡ B0 C 0 . Wir führen eine Beweis durch Widerspruch und führen die Annahme “BC
ist nicht äquivalent zu B0 C 0 ” zum Widerspruch. Denn dann würde ein Punkt D 0 auf B0 C 0
existieren mit BC = B0 D 0 und jeweils zwei Seiten der Dreieck ABC und A0 B0 D 0 sind
jeweils kongruent. Der Winkel mit Scheitel in B ist kongruent und nach Axiom III.6 sind
alle Winkel kongruent. Nach Axiom III.5 folgt ∠ B0 A0 C 0 ≡ ∠ B0 A0 D 0 , was nicht möglich ist,
da nach Axiom III.4 ein Winkel nur auf eine Art abgetragen werden kann.
D0
C
C0
A
B
A0
B0
5) Zweiter Kongruenzsatz für Dreiecke. Wenn in zwei Dreiecken je eine Seite und zwei anliegende Winkel kongruent sind, so sind die Dreiecke kongruent.
Beweis: Sei AB ≡ A0 B0 , ∠ A = ∠ A0 und ∠ B = ∠ B0 . Wir zeigen BC ≡ B0 C 0 da daraus
nach dem ersten Kongruenzsatz die Behauptung folgt. Es gibt einen Punkt D 0 auf dem
durch B0 und C 0 definierten Halbstrahl mit BC ≡ B0 D 0 . Dann sind nach dem ersten Kongruenzsatz ABC und A0 B0 D 0 kongruent, und damit ∠ B0 A0 D 0 ≡ ∠ B0 A0 C 0 , was nur sein
kann wenn A0 und D 0 sowie A0 und C 0 auf einem Halbstrahl liegen. Da zwei verschiedene
Geraden höchstens einen Punkt gemeinsam haben folgt C 0 = D 0 .
9
Grundlagen nach Euklid und Hilbert
6) Wenn zwei Winkel kongruent sind, so sind auch ihre Nebenwinkel kongruent.
Beweis: Die Winkel ∠ ABC und ∠( g0 , h0 ) seien kongruent, B liege zwischen A und dem
Punkt D. Bezeichne den Scheitel von g0 h0 mit B0 und wähle Punkte A0 , C 0 und D 0 auf den
Schenkeln so dass
A0 B0 ≡ AB, C 0 B0 ≡ CB D 0 B0 ≡ DB
Da nach Voraussetzung die eingeschlossenen Winkel kongruent sind folgt mit dem ersten
Kongruenzsatz die Kongruenz der Dreiecke, insbesondere
AC ≡ A0 C 0
∠ BAC ≡ ∠ B0 A0 C 0 .
Nach Axiom III.3 ist AD ≡ A0 D 0 und nach dem ersten Kongruenzsatz sind CAD und
C 0 A0 D 0 kongruent und insbesondere
CD ≡ C 0 D 0 ,
∠ ADC ≡ ∠ A0 D 0 C 0
und nach Axiom III.6 in den Dreiecken BCD und B0 C 0 D 0 folgt die Kongruenz der Nebenwinkel.
C
A
B
D
7) Scheitelwinkel sind kongruent. Dies folgt direkt aus der Kongruenz der Nebenwinkel.
8) Es gelte ∠(h, k ) ≡ ∠(h0 , k0 ). Sei l ein vom Scheitel des ersten Winkels ausgehender Halbstrahl im Innern des Winkels. Dann gibt es einen analogen Halbstrahl l 0 im Inneren des
zweiten Winkels mit
∠(h, l ) ≡ ∠(h0 , l 0 ), ∠(k, l ) ≡ ∠(k0 , l 0 ).
Beweis: Wir bezeichnen die Scheitel mit O und O0 und bestimmen Punkte A, B, A0 und
B0 auf den entsprechenden Schenkeln so dass
OA ≡ O0 A0
OB ≡ O0 B0
Nach dem ersten Kongruenzsatz sind die Dreiecke OAB und O0 A0 B0 kongruent. Die Gerade
AB schneide l in C (Nach Axiom II.2 existiert D so, dass O zwischen D und A liegt. Die
10
Grundlagen nach Euklid und Hilbert
Gerade l schneidet AD genau in O, also schneidet sie nach Axiom II.4 entweder AB oder
DB. Da der Strahl nach Voraussetzung im Innern verläuft kann l DB nicht schneiden.) Wir
bestimmen einen Punkt C 0 nach Axiom III.1 auf A0 B0 mit A0 C 0 ≡ AC. Wir behaupten: O0 C 0
bestimmt den gesuchten Halbstrahl. Nach Axiom III.3 folgt BC ≡ B0 C 0 und entsprechende
Teildreiecke sind kongruent. Dann gilt das aber auch für die Winkel.
9) Seien h,k, l und h0 , k0 und l 0 je drei von einem Punkt ausgehende Halbstrahlen wie oben.
∠(h0 , l 0 ) ≡ ∠(h, l ),
∠(l, k) ≡ ∠(l 0 , k0 ) =⇒ ∠(h, k) ≡ ∠(h0 , k0 ).
Beweis: Wir bezeichnen die Scheitel mit O und O0 und Punkte A auf h B auf k und C auf
l sowie A0 B0 und C 0 so dass die analogen Strecken kongruent sind und C zwischen A und B
und C 0 zwischen A0 und C 0 liegen. Nach dem ersten Kongruenzsatz sind die Dreiecke OAC
und O0 A0 C 0 sowie OCB und O0 C 0 B0 kongruent, also auch die Strecken AC und A0 C 0 sowie
CB ≡ C 0 B0 . Nach Axiom III.3 folgt AB ≡ A0 B0 und ∠OAB = ∠O0 A0 B0 . Da zusätzlich
OA ≡ O0 A0 folgt nach dem ersten Kongruenzsatz die Kongruenz der Dreiecke OAB und
O0 A0 B0 und damit auch die behauptete Kongruenz der Winkel.
10) Sind zwei Winkel kongruent, und ist einer von ihnen ein rechter Winkel, so gilt dies auch
für den zweiten Winkel.
11) Rechte Winkel sind kongruent.
Beweis: Der Winkel ∠ BAD sei zu seinem Nebenwinkel ∠CAD kongruent, und genauso
∠ B0 A0 D 0 ≡ ∠C 0 A0 D 0 . Es existiert D 00 auf der selben Seite wie D von BC mit ∠CAD 00 ≡
∠C 0 A0 D 0 . Entweder liegt D 00 auf dem durch A und D definierten Halbstrahl - dann sind wir
fertig, oder im Innern von ∠CAD, oder im Innern von BAD. Wir nehmen den zweiten Fall
an - der dritte geht analog. Da der Winkel CAD 00 ein rechter Winkel ist folgt ∠ BAD 00 ≡
∠CAD 00 . Dann gibt es aber nach Punkt 8 einen Punkt D 000 im Inneren von ∠ BAD mit
∠ BAD 000 ≡ ∠CAD 00 ≡ ∠ BAD 00 (da ∠CAD 00 ein rechter Winkel ist) woraus nach Axiom
III.4 D 00 = D 000 = D folgt.
D 000
B
D
A
D 00
C
11
Grundlagen nach Euklid und Hilbert
3. Vorlesung am 17. April 2012
12) Seien zwei Winkel ∠ AOB und ∠ A0 O0 B0 gegeben. Dann können wir den zweiten Winkel an
OA auf der Seite von B abtragen. Es existiert also ein Punkt D mit ∠ AOD ≡ ∠ A0 O0 B0 .
Liegt D im Innern des Winkels ∠ AOB so sagen wir ∠ A0 O0 B0 < ∠ AOB, liegt B im Innern
von ∠ AOD so sagen wir ∠ AOB < ∠ A0 O0 B0 .
13) Die Winkel eines Dreiecks nennen wir auch Innenwinkel, ihre jeweiligen Nebenwinkel entsprechend die jeweils zugehörigen Außenwinkel.
Ein Außenwinkel eines Dreieck ist größer als jeder der beiden gegenüberliegenden Innenwinkel.
Beweis siehe Übungsaufgabe 4.
14) Sei α eine Ebene, a eine Gerade und A ein Punkt in α, der nicht auf a liegt. Dann existiert
genau eine Gerade b in α, die A enthält, und die senkrecht auf a ist.
Beweis: Wir wählen zwei Punkte BC auf a und tragen die Winkel ABC auf der anderen
Seite ab, und dann die Strecke BA und definieren so den Punkt A0 . Wir behaupten: Die
durch A und A0 gegebene Gerade schneidet a senkrecht in einem Punkt D. Nach dem ersten
Kongruenzsatz sind die Dreiecke BDA und BDA0 kongruent, also ist ∠ BDA ≡ ∠ BDA0 .
Die Gegenwinkel sind also gleich, und wir haben rechte Winkel konstruiert.
Sei b0 eine zweite derartige Gerade, die mit a einen Punkt D 0 enthält, und die a im rechten
Winkel schneidet. Ist D 6= D 0 , so hat das Dreieck DD 0 A zwei rechte Winkel, und ein
Außenwinkel stimmt mit dem gegenüberliegenden Innenwinkel überein. Das kann nach 13
nicht sein. Daraus folgt die Eindeutigkeit.
15) Zu A 6= B gibt es einen Punkt C zwischen A und B mit AC ≡ CB. Die Senkrechte b zu
der durch A und B definierten Geraden durch C enthält alle Punkte D, für die AD ≡ BD
gilt, und alle derartigen Punkte liegen auf dieser Senkrechten.
16) Wir definieren einen Kreis durch zwei Punkte O und A in einer Ebene α als die Menge
aller Punkte P in α mit OP ≡ OA.
Zu jedem Winkel ∠(h, k ) gibt es eine Winkelhalbierende. Jeder Punkt der Winkelhabierenden ist Mittelpunkt eines Kreises, der mit h und k jeweils genau einen Punkt gemeinsam
hat. Umgekehrt liegt jeder derartige Punkt auf der Winkelhalbierenden.
17) Eine Gerade und eine Kreis haben höchsten zwei gemeinsame Punkte.
Beweis: Dies folgt aus dem Axiomen III.1 wenn O auf der Geraden liegt. Wir betrachten
den Fall wenn O nicht auf der Geraden liegt. Seien C und D zwei Punkte, die auf dem
Kreis und der Geraden liegen. Sei O0 der wie oben gespiegelte Punkt. Dann haben C und
D den gleichen Abstand vom Schnitt von a und der durch O und O0 definierten Geraden.
Dann kann es keinen dritten gemeinsamen Punkt geben.
12
Grundlagen nach Euklid und Hilbert
18) Zwei nichtidentische Kreise in einer Ebene α haben höchsten zwei gemeinsame Punkte.
Beweis: Seien O und O0 die Mittelpunkte mit O 6= O0 da sonst nichts zu zeigen ist. Seien C
und D zwei gemeinsame Punkte. Die durch sie definierte Gerade schneidet die Verbindung
von O und O0 senkrecht. Da aber zu einem Punkt und einer Geraden genau ein Lot existiert
müssen alle gemeinsamen Punkte auf dieser Geraden liegen und die Aussage folgt aus der
analogen Aussage für Gerade und Kreis.
19) Dritter Kongruenzsatz für Dreiecke. Seien ABC und A0 B0 C 0 Dreiecke mit
AB ≡ A0 B0 , BC ≡ B0 C 0 , AC ≡ A0 C 0 .
Dann sind die Dreiecke kongruent.
Beweis: Es genügt diese Aussage für ABC und ABC 00 zu zeigen, wobei C und C 00 auf
der selben Seite der Gerade durch A und B liegen. Nach 18 müssen Schnittpunkte auf
unterschiedlichen Seiten liegen, also folgt C = C 00 .
Eine Figur ist eine endliche Anzahl von Punkten. Liegen diese in einer Ebene, so nennen wir die
Figur eben. Zwei Figuren heißen kongruent, wenn sich die Punkte so einander zuordnen lassen,
dass entsprechende Strecken und Winkel jeweils kongruent sind.
9 Satz Sei n eine natürliche Zahl größer oder gleich 2. Sind ( A1 , A2 , . . . , An ) und ( B1 , B2 . . . , Bn )
kongruente ebene Figuren, und ist P ein Punkt in der Ebene der ersten Figur, so existiert ein
Punkt P0 in der Ebene der zweiten Figur so dass ( A1 , . . . An , P) und ( B1 , . . . Bn , P0 ) kongruent
sind. P0 ist eindeutig, falls die Punkte A1 , . . . , An nicht auf einer Geraden liegen.
Beweis:
Wir beginnen mit n = 2. Ist P auf der durch A1 und A2 definierten Geraden so folgt die
Aussage direkt aus den Axiomen. Im anderen Fall tragen wir einen Winkel ab und verwenden
den ersten Kongruenzsatz. Dafür hatten wir zwei Möglichkeiten. Nun betrachten wir drei Punkte
und nehmen zunächst an, dass diese nicht auf einer Geraden liegen. Dann wenden wir die erste
Aussage auf A1 , A2 und P an, wobei wir durch A3 eine Seite ausgewählt haben und daher nur
ein Punkt in Frage kommt. Wir müssen nun zeigen: A3 P ≡ B3 P0 . Der Rest folgt mit dem dritten
Kongruenzsatz.
A3
P
A1
A2
Nun ist nach Annahme ∠ A2 A1 A3 ≡ ∠ B2 B1 B3 und nach Konstruktion ∠ A2 A1 P ≡ ∠ B2 B1 P0 , also
auch ∠ PA1 A2 ≡ ∠ P0 B1 B2 (Vorsicht Fallunterscheidung). Nach Voraussetzung gilt A1 A3 ≡ B1 B3
13
Grundlagen nach Euklid und Hilbert
und nach Konstruktion A1 P ≡ B1 P0 . Also ist nach dem ersten Kongruenzsatz A1 PA3 kongruent
zu B1 P0 B3 und damit A3 P ≡ B3 P0 .
Liegen alle drei Punkte auf einer Geraden so wählen wir eine Seite aus.
Wir erhalten das volle Resultat mit Hilfe der vollständigen Induktion.
10 Satz Sind ( A1 , A2 , . . . , An ) und ( B1 , B2 . . . , Bn ) kongruente Figuren, und ist P ein Punkt, so
existiert ein Punkt P0 so dass ( A1 , . . . An , P) und ( B1 , . . . Bn , P0 ) kongruent sind. P0 ist eindeutig,
falls es vier Punkte unter den Ai gibt, die nicht in einer Ebene liegen.
Ohne Beweis.
2.4 IV: Das Parallelenaxiom
Sei α eine Ebene, a eine Gerade in α, A ein Punkt in α aber nicht in a. Wähle eine Gerade c,
die durch A geht, und die a in einem Punkt B schneidet. Dann gibt es eine Gerade b durch
A mit gleichen Gegenwinkeln. Die Geraden a und b können nach dem Außenwinkelsatz keinen
Schnittpunkt haben: Hätten sie einen Schnittpunkt C, dann wäre ein Außenwinkel kongruent zu
einem gegenüberliegenden Innenwinkel.
Das Parallelenaxiom fordert nun, dass es höchstens eine derartige Gerade gibt.
IV
Zu einer Geraden a in der Ebene α und einem Punkt A in α, der nicht auf a liegt,
existiert genau eine Gerade durch A, die keinen gemeinsamen Punkt mit a hat.
B
O0
D
E
F
O
A
C
∠ DO0 C ist Stufenwinkel zu ∠COE. ∠ FO0 B ist Wechselwinkel zu ∠COE.
11 Satz Werden zwei parallele Geraden (zwei sich nicht schneidende Geraden) von einer
dritten Geraden geschnitten (d.h. sie enthalten jeweils gemeinsame Punkte), so sind Winkel und
Wechselwinkel kongruent.
Beweis:
Oben haben wir Geraden mit kongruenten Wechselwinkeln konstruiert. Diese können sich nicht
schneiden. Nach dem Parallelenaxiom IV ist diese Gerade eindeutig durch den gemeinsamen
Punkt bestimmt.
14
Grundlagen nach Euklid und Hilbert
12 Satz
Die Winkelsumme im Dreieck ist die Summe zweier rechter Winkel.
Beweis:
Die Winkel im Dreieck sind kongruent zu Wechselwinkeln. Zwei Wechselwinkel und ein Winkel
addieren sich auf zur Summe zweier rechter Winkel.
13 Satz Die Mittelsenkrechten eines Dreiecks ABC schneiden sich in einem Punkt O. Der
Schnittpunkt heißt Umkreismittelpunkt. Es gilt AO ≡ BO ≡ CO.
Beweis:
Seien A, B, C drei nicht auf einer Geraden liegenden Punkte. Nach Axiom I.2 gibt es genau eine
Ebene α die diese drei Punkte enthält. Die Aussage bezieht sich auf diese Ebene. Nach 8.15 gibt
es genau einen Punkt D zwischen A, B mit AD ≡ DB. Nach 8.14 existiert genau eine Gerade c,
die die durch A und B definierte Gerade im Punkt D senkrecht schneidet. Ersetzen von A durch
C führt auf die Mittelsenkrechte a zwischen B und C, die BC in einem Punkt D 0 schneidet.
Seien nun die Geraden a und c parallel. Wäre a zudem parallel zu der Geraden, die AB enthält,
so wäre auch c parallel zu dieser Geraden. Das kann aber nicht sein, da c diese Gerade laut
Konstruktion schneidet. Wäre umgekehrt a nicht parallel zur Geraden, die AB enthält, und
nennen wir den Schnittpunkt E, dann hätte das Dreieck D 0 BE zwei rechte Winkel, und damit
würde ein Außenwinkel mit einem gegenüberliegenden Innenwinkel übereinstimmen. Das ist ein
Widerspruch zum Außenwinkelsatz. a und c müssen also einen Schnittpunkt haben, den wir O
nennen.
Dann sind die Dreiecke AOD und BOD (mit zwei kongruenten Seiten und dem kongruenten
eingeschlossenen Winkel) nach dem ersten Kongruenzsatz kongruent, und damit OA ≡ OB.
Genauso erhalten wir OB ≡ OC, und somit auch OA ≡ OC. Mit 8.15 folgt dann, dass O auf der
Mittelsenkrechten von AC liegen muss.
Es gilt der Peripheriewinkelsatz.
14 Satz Sei α eine Ebene, K ein Kreis mit Mittelpunkt O, auf dem die verschiedenen Punkte A,
B, C liegen. Der Winkel ∠ AOB ist kongruent zum Doppelten des Winkels ∠ ACB. Insbesondere:
Sind C und C 0 auf dem Kreis und der selben Seite der durch A und B definierten Geraden, so
folgt
∠ ACB ≡ ∠ AC 0 B.
Eine vollständig rigorose Fassung der Aussage erfordert eine Fallunterscheidung: Liegen O und
C auf verschiedenen Seiten der durch A und B gegebenen Geraden, ist also der Peripheriewinkel
∠ ACB größer als ein rechter Winkel, dann ist die Summe aus dem Zentralwinkel ∠ AOB und dem
Doppelten des Peripheriewinkels kongruent zum Vierfachen des rechten Winkels. Anschaulich
bedeutet das, dass wir in diesem Fall einfach den größeren der beiden möglichen Zentralwinkel
betrachten.
15
Grundlagen nach Euklid und Hilbert
Beweis:
Wir behandeln nur den Fall, dass O und C auf der gleichen Seite der durch AB definierten
Geraden in der Ebene liegen, und überlassen den anderen Fall dem Leser.
Es genügt, die Aussage für den speziellen Fall zu betrachten, dass O zwischen B und C liegt.
Ansonsten führen wir einen weiteren Punkt D auf dem Kreis ein, der C gegenüberliegt, und
wenden den Spezialfall zweimal an.
Sei also O zwischen B und C, und C und O auf der gleichen Seite.
Wir zeigen: ∠ AOB ist kongruent zum Doppelten des Winkels ∠ BCA. Die Dreiecke AOC und
AOB sind jeweils gleichschenklig, und nach dem dritten Kongruenzsatz kongruent zu den Dreiecken, die durch Vertauschen zweier Ecken entstehen. Damit sind die Basiswinkel ∠ ACO und
∠CAO kongruent. Der Winkel ∠ AOC ist Nebenwinkel zu ∠ AOB, d.h. die Summe ist die Summe
zweier rechter Winkel. Aufgrund Satz 12 ist die Summe der Winkel im Dreieck AOC auch die
Summe zweier rechter Winkel, also ist ∠ AOB die Summe der kongruenten Winkel ∠OAC und
∠OCA. Daraus folgt die Aussage.
Der Satz von Thales ist ein Spezialfall.
15 Satz Liegt in der Situation von Satz 14 O zwischen A und B und ist C ein beliebiger Punkt
auf dem Kreis, so ist der Winkel ∠ ACB ein rechter Winkel.
16
Grundlagen nach Euklid und Hilbert
4. Vorlesung am 24. April 2012
Es gilt auch die Umkehrung des Peripheriewinkelsatzes. Wie oben wäre für eine vollständige
Formulierung eine Fallunterscheidung notwendig.
16 Satz Seien A und B auf einem Kreis um O, C nicht auf der durch A und B gegebenen
Geraden, aber in der selben Ebene und so, dass ∠ BOA kongruent ist zum Doppelten von ∠ ACB.
Dann folgt, dass C auf dem selben Kreis liegt.
Sind A, B, C und D vier Punkte in einer Ebene, C und D nicht auf der durch A und B definierten
Geraden, aber auf der selben Seite von ihr und mit ∠ ACB ≡ ∠ ADB, so liegen die vier Punkte
auf einem Kreis.
Beweis:
Sei O0 der Umkreismittelpunkt des Dreieck ABC. Nach dem Peripheriewinkelsatz ist ∠ BO0 A
kongruent zum Doppelten von ∠ BCA, also laut Voraussetzung kongruent zu ∠ BOA. Wir nehmen
an, weder O noch O0 liegt auf der Geraden durch A und B. Diese Fälle sind einfacher.
Die Dreieck ABO und ABO0 sind gleichschenklig, also sind jeweils die Basiswinkel kongruent,
und da nach Konstruktion ∠ AOB ≡ AO0 B ist aufgrund der Winkelsumme im Dreieck ∠ ABO ≡
∠ ABO0 ≡ ∠ BAO ≡ ∠ BAO0 . Da auch AB ≡ AB sind nach dem zweiten Kongruenzsatz die
Dreiecke ABO und ABO0 kongruent. Überprüfen der Mehrdeutigkeit zeigt dass O und O0 auf
der gleichen Seite von AB liegen, und damit folgt O = O0 .
Für die zweite Aussage nennen wir den Umkreismittelpunkt des Dreiecks ABC wieder O0 . Dann
ist ∠ ADB nach Voraussetzung kongruent zu ∠ ACB, das Doppelte ist nach dem Peripheriewinkelsatz kongruent zu ∠ AO0 B, und nach der ersten Aussage liegt D auf dem Kreis.
Wir betrachten nun vier verschiedene Punkte A, B, C D auf einem Kreis
D
C
A
B
Für diese 4-Punkt Konfigurationen gilt:
17 Satz Sind vier Punkte A, B, C und D auf einem Kreis, so addieren sich gegenüberliegende
Winkel zum Doppelten des rechten Winkels.
17
Grundlagen nach Euklid und Hilbert
Umgekehrt: Ist im Viereck ABCD die Summe zweier gegenüberliegender Winkel das Doppelte
des rechten Winkels, so liegen die vier Punkte auf einem Kreis.
Beweis:
Sei O der Kreismittelpunkt. Ist O ∈ AC dann folgt die Aussage sofort. Sei also O 6∈ AC.
Dann liegt einer der Punkte B und D auf der selben Seite von AC wie O, während der andere
auf der anderen Seite liegt. OBdA seien B und O auf der selben Seite. Wegen des Peripheriewinkelsatz ist das Doppelte des Winkels ∠ ABC kongruent zu ∠ AOC, und das Vierfache des
rechten Winkels ist kongruent zur Summe aus dem Winkel ∠ AOC und dem Doppelten des
Winkels ∠ ADC. Daraus folgt die Behauptung.
Für die Umkehrung sei O0 der Umkreismittelpunkt von ABC. Die Summe von ∠ ABC und ∠ ADC
sei kongruent zu zwei rechten Winkeln. OBdA seien wieder B und O0 auf der selben Seite von
AC. Nach dem Peripheriewinkelsatz ist dann das Doppelte von ∠ ABC kongruent zu ∠ AO0 C.
Auf Grund der Voraussetzung folgt daraus, dass das Vierfache des rechten Winkels kongruent
ist zur Summe aus ∠ AO0 C und dem Doppelten des Winkels ∠ ADC. Das genau benötigen wir
als Voraussetzung der Anwendung des umgekehrten Peripheriewinkelsatzes auf die Punkte A, B
und D, da D auf der Seite der durch A und B gegebenen Geraden liegt, auf der O0 nicht liegt.
Damit liegt D auf dem Umkreis.
2.5 Streckenarithmetik
Wir folgen R. Hartshorne [3].
Die Kongruenzrelation definiert eine Äquivalenzrelation auf den Strecken, es gilt
1) AB ≡ AB
2) AB ≡ A0 B0 ⇐⇒ A0 B0 ≡ AB
3) AB ≡ A0 B0 und A0 B0 ≡ A00 B00 impliziert AB ≡ A00 B00 .
Die Äquivalenzklasse einer Strecke AB ist die Menge aller zu AB kongruenten Strecken. Eine
Äquivalenzklasse ist durch jedes Element eindeutig bestimmt, und wir schreiben ( AB) für die
zu AB gehörende Äquivalenzklasse. Wir bezeichen Äquivalenzklassen außerdem mit s, t etc.
Wir definieren nun eine Addition auf den Äquivalenzklassen. Seien s und t gegeben. Wir fixieren
eine Gerade a und einen Punkt O auf a. Zu EF ∈ s und GH ∈ t gibt es nach Axiom III.1
Punkte A und B auf a so dass A zwischen O und B und OA ≡ EF, AB ≡ GH. Die Summe der
Äquivalenzklassen s und t definieren wir dann als die Äquivalenzklasse, deren Vertreter OB ist.
Es gilt
1) Die Definition der Summe ist unabhängig von den Vertretern.
18
Grundlagen nach Euklid und Hilbert
2) s + t = t + s
3) (s + t) + u = s + (t + u)
4) Für s und t gilt genau eine der Alternativen
• s = t.
• Es gibt genau ein u mit s + u = t (falls s < t).
• Es gibt genau ein u mit s = t + u (falls t < s).
Der Beweis dieser Aussagen erfordert einen korrekten Umgang mit dem Formalismus, aber es
gibt keine Überraschungen.
Wir wenden uns nun der Definition des Produkts zu. Seien wieder s und t gegeben. Wir fixieren
eine Äquivalenzklasse, die wir 1 nennen. Nun wählen wir ein rechtwinkliges Dreieck ABC wobei
AB ∈ 1 und BC ∈ s mit rechtem Winkel in B.
An DE ∈ t tragen wir einen rechten Winkel bei E ab, und bei D auf der selben Seite von DE
den Winkel ∠ BAC. Den Schnittpunkt der beiden neuen Schenkel nennen wir F, so dass wir ein
zweites rechtwinkliges Dreieck DEF mit rechtem Winkel in E, DE ∈ t und ∠ BAC ≡ ∠EDF
erhalten. Das Produkt von s und t ist dann als die Äquivalenzklasse von EF definiert.
Ein Spezialfall ist:
F
C
A=D
B
E
mit rechtwinkligen Dreiecken ABC und AEF, AB ∈ 1, BC ∈ s, AE ∈ t. Das Produkt ist die
Äquivalenzklasse von EF. Wir bekommen ähnliche Aussagen wie für die Summe, sie sind aber
nicht mehr offensichtlich.
1) Das Produkt hängt nur von den Äquivalenzklassen und nicht von den Vertretern ab.
2) s 1 = s
3) s t = t s
4) s (t u) = (s t) u
5) Für jedes s existiert genau ein t mit s t = 1
6) s (t + u) = s t + s u.
19
Grundlagen nach Euklid und Hilbert
Beweis:
Zur Frage der Wohldefiniertheit betrachten wir zwei Dreiecke ABC und A0 B0 C 0 mit rechtem
Winkel in B und B0 , AB ≡ A0 B0 ∈ 1 und BC ≡ B0 C 0 ∈ s. Dann sind nach dem ersten Kongruenzsatz die Dreiecke kongruent, und damit AC ≡ A0 C 0 und ∠ A ≡ ∠ A0 . Mit D 0 E0 ∈ t erhalten
wir dann ein Dreieck D 0 E0 F 0 mit D 0 E0 ≡ DE, ∠E ≡ ∠E0 und ∠ D 0 ≡ ∠ A0 ≡ ∠ A und somit
EF ≡ E0 F 0 . Die Äquivalenzklasse hängt also nicht von der Wahl der Dreiecke ab.
Zum Beweis von s1 = s betrachten wir ein rechtwinkliges Dreieck mit AB ∈ 1 und BC ∈ s. Die
Aussage folgt aus BC ≡ BC.
Zum Nachweis des Kommutativgesetzes konstruieren wir die folgende Figur (konstruieren meint
einen Existenzbeweis - siehe Übungsaufgabe 6) mit ∠ BAC ≡ ∠ BDF und ∠ BAD ≡ ∠ BCF. Da
die zu A und B gehörende Gerade sowohl vom von C kommenden Schenkel als auch vom von D
kommenden Schenkel in F geschnitten wird gilt t s = s t.
C
s
A
1 B
t
st = ts
F
D
Für das Assoziativgesetz argumentieren wir ähnlich.
Die Existenz der multiplikativen Inversen folgt aus der Konstruktion zweier Dreiecke ABC und
A0 B0 C 0 mit rechtem Winkel in B bzw B0 , wobei BC ∈ s, AB, A0 B0 ∈ 1 und ∠ B0 A0 C 0 ≡ ∠ BCA.
Nennen wir die zu B0 C 0 gehörende Äquivalenzklasse t, so folgt st = 1.
Für das Distributivgesetz betrachten wir
F
C
B
A
E
D
Wie bei den Zahlbereichserweiterungen im letzten Semester erhalten wir:
20
Grundlagen nach Euklid und Hilbert
18 Satz Sei a eine Gerade und O und A zwei verschiedene Punkte auf der Geraden. Dann
können wir auf den Punkten der Geraden eine Addition und Multiplikation definieren, die die
Punkte der Geraden zu einem geordneten Körper macht, mit 0 = O und 1 = A.
Ein geordneter Körper ist ein Körper mit dem Ordnungsaxiom.
Sei K dieser angeordnete Körper. Im kartesischen Produkt K3 können wir Punkte, Geraden und
Ebenen als Mengen von Punkten definieren mit der offensichtlichen Inzidenz-, Zwischen- und
Kongruenzrelation.
19 Satz
O.
Sei O ein Punkt. Es existieren senkrecht aufeinander stehende Geraden a, b, c durch
Ohne Beweis.
20 Satz Seinen O, a, b und c senkrecht aufeinander stehende Geraden, A ein Punkt auf a und
g und h in O beginnende Halbstrahlen auf b und c. Dann existiert genau eine bijektive Abbildung
von K3 auf alle Punkte, die die geometrischen Strukturen erhält, und die (0, 0, 0) auf O, (1, 0, 0)
auf A, (0, 1, 0) und (0, 0, 1) auf einen Punkt B in g und C in h ab mit OA ≡ OB ≡ OC.
Ohne Beweis.
Beachte schließlich, dass der Quotient ( AB) : (CD ) ein Element des Körpers ist, der nicht von
der Wahl der 1 abhängt.
21
Grundlagen nach Euklid und Hilbert
5. Vorlesung am 8. Mai 2012
2.6 Ähnlichkeit
Wir sagen, die Strecken AB, CD und A0 B0 und C 0 D 0 sind proportional, wenn ( AB) : (CD ) =
( A 0 B 0 ) : ( C 0 D 0 ).
Es ist offensichtlich, dass der Quotient zweier Äquivalenzklassen von Strecken eine Zahl in K
ist, die nicht von der Wahl der 1 abhängt. Das ist der Ausgangspunkt für die Definition der
Ähnlichkeit.
21 Definition Zwei Figuren heißen ähnlich, wenn alle entsprechenden Winkel kongruent und
Äquivalenzklassen entsprechender Strecken proportional sind.
22 Satz (WWW)
sind.
Zwei Dreiecke sind ähnlich, wenn je zwei entsprechende Winkel kongruent
Beweis:
Nach Definition der Streckenmultiplikation ist das Verhältnis Ankathede zu Hypotenuse in rechtwinkligen Dreiecken mit kongruenten Winkeln gleich.
Wir bezeichnen den Schnittpunkt der Winkelhalbierenden mit O und die Fusspunkte des Lotes
auf die Seiten mit E, F und G. Da O der Mittelpunkt des Innenkreises ist folgt OE ≡ OF ≡ OG.
Wir erhalten 6 rechtwinklige Dreiecke. Der Vergleich der Quotienten zeigt die Behauptung.
23 Satz Im Dreieck ABC sei B0 zwischen A und B, und C 0 zwischen A und C, und die durch
B0 und C 0 definierte Gerade sei parallel zu BC. Dann folgt ( AB0 ) : ( AB) = ( AC 0 ) : ( AC ).
Umgekehrt folgt aus der Gleichheit die Parallelität der Geraden.
Beweis:
Aus der Parallelität folgt die Kongruenz entsprechender Winkel ABC und AB0 C 0 . Nach Satz
WWW folgt die Proportionalität der Seiten.
Sei nun D ein Punkt auf AC so dass AB, AB0 sowie AC und AD proportional sind. Die Parallele
zu BC durch B0 trifft AC in einem Punkt C 0 . Dann folgt ( AD ) : ( AC ) = ( AB0 ) : ( AB) = ( AC 0 ) :
( AC ) und D = C 0 . Damit folgt die Parallelität.
24 Satz (SSS)
Sind drei entsprechende Seiten der Dreiecke ABC und A0 B0 C 0 proportional,
so sind die Dreiecke ähnlich.
Beweis:
Wir konstruieren ein zu A0 B0 C 0 kongruentes Dreieck im Dreieck ABC, und es genügt, die Aussage
in der Situation von (23) zu beweisen. Aus der Parallelität folgt die Kongruenz der Winkel, und
nach Satz AAA die Ähnlichkeit der Dreiecke.
22
Grundlagen nach Euklid und Hilbert
25 Satz (SWS)
Haben die zwei Dreiecke ABC und A0 B0 C 0 kongruente Winkel ∠ BAC ≡
∠ B0 A0 C 0 und proportionale Seiten ( AB) : ( AC ) = ( A0 B0 ) : ( A0 C 0 ) so sind die Dreiecke ähnlich.
Der Beweis bleibt dem Leser überlassen.
Es gilt folgende Version des Satzes von Pythagoras.
26 Satz
Sei ABC ein Dreick mit rechtem Winkel ∠ BCA. Dann gilt
( BC )( BC ) + ( AC )( AC ) = ( AB)( AB)
27 Satz
Es gilt die Dreiecksungleichung:
( AC ) ≤ ( AB) + ( BC )
mit Gleichheit genau dann wenn B zwischen A und C liegt.
Beweis:
Wir bezeichnen den Fußpunkt der Projektion von C auf die durch A und B definierte Gerade mit
D. Nach dem Satz des Pythagoras gilt ( BD ) ≤ ( BC ) mit Gleichheit genau dann wenn D = C.
Die Aussage folgt nun für D mit der Streckenarithmetik.
28 Satz Zu einem Punkt P und einer Geraden a existiert genau ein Punkt A auf a, für den
( AP) ≤ ( A0 P) für alle Punkte A0 auf a. Wir nennen ( AP) den Abstand von A und a.
Beweis:
Liegt P auf a so wählen wir A = P. Falls nicht existiert genau eine Ebene, die a und P enthält. In
dieser fällen wir das Lot. Nach der Dreiecksungleichung genügt der Fusspunkt der gewünschten
Ungleichung. Auch die Eindeutigkeit folgt aus der Dreiecksungleichung.
2.7 V: Archimedisches Axiom und Axiom der Vollständigkeit
In diesem Abschnitt gehen wir davon aus, dass die Axiome I-III gelten, aber nicht notwendigerweise das Parallenaxiom.
Wir beginnen mit dem Archimedischen Axiom. Wir betrachten eine Gerade a mit den verschiedenen Punkten O und A. Aus diesen Punkten läßt sich mit Hilfe der Axiome ein Maßstab
entwickeln. Sei B ein Punkt auf der Geraden, so dass A zwischen O und B liegt. Nach dem
Kongruenzaxiom Axiom III.1 können wir Punkte Ai auf g finden mit A1 = A, A0 = O, und
Ai Ai+1 ≡ OA.
23
Grundlagen nach Euklid und Hilbert
V.1
Es gibt ein n so dass B zwischen A und An liegt. (Archimedes)
V.2
Zu je zwei disjunkten Halbstrahlen auf einer Geraden existiert ein Punkt auf der
Geraden, der in keinem der Halbstrahlen liegt. (Vollständigkeit nach Dedekind)
Erinnerung: Der Ausgangspunkt liegt nicht auf dem Halbstrahl. Mit diesen Axiomen ist der
Körper im letzten Abschnitt gleich (isomorph zu) dem Körper der reellen Zahlen. Wir können
die Zuordnung zu den reellen Zahlen mit dem Prinzip der Wechselwegnahme definieren.
Seien EF und GH Strecken. Wir definieren den Quotienten durch ( EF ) : ( GH ) (die Klammer
bezeichnet die Äquivalenzklasse). Alternativ wählen wir drei Punkte O, A und B auf der Geraden
a, wobei A und B auf dem selben Halbstrahl liegen und OA ≡ EF, OB ≡ GH.
Nach dem Archimedischen Axiom gibt es auch eine kleinste Zahl n, für die entweder B = An ,
oder B zwischen An und An+1 . Wir wollen den zwei Punkten OB einen Abstand zuordnen. Dazu
gehen wir wie beim Euklidschen Algorithmus vor und setzen c0 = n. Ist B = An so definieren
wir den Abstand |OB| = n. Im anderen Fall definieren wir A0 als den Punkt zwischen O und A
mit OA0 ≡ An B und B0 = A. Wir wiederholen die Konstruktion und erhalten c1 . Das Verfahren
kann abbrechen, oder auch nicht. Wir definieren die reelle Zahl
|OB| = c0 +
1
.
c1 + c21...
Offensichtliche Variationen ergeben eine analoge Definition für alle Punkte auf dem Halbstrahl.
Mit Hilfe von Axiom III.1 erhalten wir einen Abstandsbegriff für alle Punkte: Seien C und D
Punkte auf der Geraden b. Dann existiert nach Axiom III.1 genau ein Punkt B auf dem Halbstrahl mit CD ≡ OB. Wir definieren |CD | = |OB|.
Der Radius eines Kreises ist eine reelle Zahl.
29 Satz Ein Kreis und eine Gerade haben genau dann zwei gemeinsame Punkte, wenn der
Radius größer als der Abstand von Gerade und Mittelpunkt ist. Sie haben genau dann einen
gemeinsamen Punkt, wenn der Radius gleich dem Abstand ist (in diesem Fall nennen wir die
Gerade Tangente), und keinen gemeinsamen Punkt sonst.
Zwei Kreise haben genau dann zwei gemeinsame Punkte, wenn der Abstand der Mittelpunkte
größer als die Summe und kleiner als die Differenz der Radien ist.
Zwei Kreise unterschiedlicher Radien haben genau dann einen gemeinsamen Punkt, wenn der
Abstand der Mittelpunkte gleich der Summe oder gleich der Differenz der Radien ist.
Zwei Kreise mit gleichem Radius haben genau dann einen gemeinsamen Punkt, wenn der Abstand
der Mittelpunkte gleich der Summe der Radien ist, und liegen übereinander, wenn der Abstand
der Mittelpunkte gleich der Differenz der Radien ist.
Zwei Kreise haben genau dann keinen gemeinsamen Punkt, wenn keiner der zuvor genannten
Fälle eintritt.
Beweis:
24
Grundlagen nach Euklid und Hilbert
Enthalten der Kreis und die Gerade einen gemeinsamen Punkt, so ist der Abstand maximal die
Länge des Intervalls von Mittelpunkt O zum Schnittpunkt. Ist der Abstand gleich der Länge der
Strecke so haben wir einen rechten Winkel, und aufgrund der Dreiecksungleichung gibt es keine
weiteren Schnittpunkt. Sei nun der Abstand größer als der Radius und P der Punkt, der den
Abstand realisiert. Wir wählen einen Punkt auf der Geraden mit Abstand größer als der Radius
(Archimedes), der eine Seite auszeichnet. Nun gibt es eine Menge von Punkten auf dieser Seite
mit Streckenlänge größer als der Radius, und eine zweite mit Punkten B die auf der anderen
Seite liegen, oder (OB) < (OP). Nach dem Vollständigkeitsaxiom gibt einen einen Punkt C
auf der Geraden mit (OC ) gleich dem Radius. Nach Bemerkung 8. 17 gibt es einen zweiten
Schnittpunkt.
Im Fall zweier Kreise gehen wir analog vor. Zum Nachweis der Existenz führen wir eine Hilfsgerade ein, die senkrecht zur ersten Geraden ist.
A
B
O
30 Satz Ein Kreis mit Mittelpunkt O und Radius r zerteilt die Punkte der Ebene, in der er
liegt, ohne den Kreis selbst in ein Inneres ((OA) < r) und ein Äußeres (mit (OA) > r). Jede
Strecke mit Endpunkten im Inneren liegt im Innern. Jede Strecke mit einem Punkt im Inneren
und einem Punkt im Äusseren enthält einen Punkt des Kreises. Zu je zwei Punkten im Äusseren
gibt es einen Streckenzug im Äusseren des Kreises.
Beweis:
Aus dem Satz von Pythagoras (und der Definition des Abstands) folgt die Aussage: Jede Strecke
mit Endpunkten im Inneren liegt im Inneren. Jede Strecke zwischen einem Punkt A im Inneren
und einem Punkt B im Äußeren liegt auf einer Geraden, die den Kreis in zwei Punkten schneidet,
und zwar je einer auf jeder Seite von A. Eine weitere Anwendung des Satzes von Pythagoras
stellt sicher, dass dieser Schnittpunkt zwischen A und B liegt. Die letzte Aussage wird durch
eine fast explizite Konstruktion bewiesen.
25
Grundlagen nach Euklid und Hilbert
2.8 Kongruenz- und Ähnlichkeitsabbildungen
Wir identifizieren im Folgenden Geraden und Ebenen mit den Mengen ihrer Punkte.
31 Definition Seien (P , G , E ) und (P 0 , G 0 , E 0 ) zwei Systeme von Punkten, Geraden und Ebenen, die beide alle Axiome erfüllen. Eine Ähnlichkeitsabbildung von (P , G , E ) nach (P 0 , G 0 , E 0 )
ist eine Abbildung, die Punkte auf Punkte, Geraden auf Geraden und Ebenen auf Ebenen abbildet, und zwar so, dass die Inzidenzrelationen, die Zwischenrelationen, und Kongruenzrelationen
erfüllt bleiben.
32 Bemerkung
1) Eine Ähnlichkeitsabbildung ist durch die Abbildung auf den Punkten eindeutig festgelegt.
2) Jede Ähnlichkeitsabbildung bildet Dreiecke auf Dreiecke mit gleichen Seitenverhältnissen
ab.
3) Jede Ähnlichkeitsabbildung ist durch vier Punkte A, B, C, D, die nicht auf einer Ebene liegen, und deren Bilder A0 , B0 , C 0 und D 0 eindeutig bestimmt. Umgekehrt gibt es zu derartigen
Punkten mit
( AC ) : ( AB) = ( A0 C 0 ) : ( A0 B0 ), ( AD ) : ( AB) = ( A0 D 0 ) : ( A0 B0 ),
( BC ) : ( AB) = ( B0 C 0 ) : ( A0 B0 ), ( BD ) : ( AB) = ( B0 D 0 ) : ( A0 B0 ),
(CD ) : ( AB) = (C 0 D 0 ) : ( A0 B0 )
genau eine Ähnlichkeitsabbildung.
4) Jede Ähnlichkeitsabbildung ist bijektiv auf den Punkten. Die Umkehrabbildung definiert
wieder eine Ähnlichkeitsabbildung.
5) Eine Kongruenzabbildung ist eine Ähnlichkeitsabbildung von (P , G , E ) auf sich selbst, die
Strecken auf kongruente Strecken abbildet.
6) Wir definieren Ähnlichkeitsabbildungen und Kongruenzabbildungen auf Ebenen analog.
7) Translationen. Sei α eine Ebene und O und A verschiedene Punkte in α. Wir definieren
eine Translation φ A in α und im Raum folgendermaßen:
Sei B ein Punkt auf der Geraden durch O und A. Dann tragen wir OA an B in die Richtung
des Halbstrahls von O nach A ab. Liegt B in der Ebene, aber nicht auf der Geraden, dann
liegt A auf einer Seite von der Geraden von O nach B. Wir tragen erst den Winkel ∠ BOA
im Punkt B in Richtung der Seite von A ab, und dann OA in B in die gleiche Richtung.
Die Abbildung bildet Strecken auf kongruente Strecken ab. Sie ist eine Translation. Die
Abbildung A → φ A ist injektiv und definiert eine kommutative Gruppenstruktur auf den
Punkten von α, nachdem wir O ausgewählt haben. Wir erhalten eine Vektorraumstruktur
auf den Punkten der Ebene, und genauso im Raum.
26
Grundlagen nach Euklid und Hilbert
8) Drehungen in der Ebene. Zu der Geraden a und dem Winkel ∠( g, h) mit g auf der
Geraden können wir eine Drehung definieren. Auch die Drehungen sind Kongruenzabbildungen und bilden eine Gruppe.
9) Drehungen im Raum. Seien eine Gerade a, g und h zu a senkrechte Halbstrahlen mit
gemeinsamen Fußpunkt. Dann können wir eine Drehung um a um den Winkel ∠( g, h) von
g nach h definieren.
10) Spiegelungen. Sei α eine Ebene. Zu jedem Punkt P existiert eine Normale der Ebene
durch diesen Punkt, d.h. eine Gerade g , die P enthält, und die auf jeder Geraden der
Ebene senkrecht steht. Die Spiegelung an α ist die Abbildung, die P auf den Punkt P0 6= P
auf g abbildet, so dass die Strecke zum Fußpunkt jeweils kongruent ist.
11) Punktspiegelung. Sei O ein Punkt im Raum. Die Punktspiegelung bildet eine Punkt A
auf den anderen Punkt A0 auf der Geraden durch O und A mit OA ≡ OA0 .
12) Die Kongruenzabbildungen bilden eine (nichtkommutative) Gruppe, die wir Kongruenzgruppe des Raumes bzw der Ebene nennen: Es gibt ein 1 Element, es gibt ein Inverses,
die Komposition zweier Kongruenzabbildungen ist eine Kongruenzabbildung, und es gilt
das Assoziativgesetz.
13) Die Ähnlichkeitsabbildungen bilden die affine Gruppe der Ebene bzw. des Raumes.
2.9 Analytische Geometrie
Wir definieren Punkte als Tripel reeller Zahlen A = ( x, y, z) und Geraden als die Lösungsmenge
zweier lineare Gleichungssysteme
a11 x + a12 y + a13 z =b1
a21 x + a22 y + a23 z =b2
für gegebene aij wobei die Zeilen linear unabhängig sind. Sei ( x0 , y0 , z0 ) eine spezielle Lösung.
Die allgemeine Lösung hat die Form
(1)
{( x0 , y0 , z0 ) + t( a12 a23 − a13 a22 , a13 a21 − a11 a23 , a11 a22 − a12 a21 ) : t ∈ R}.
Eine Ebene definieren wir als die Lösungsmenge von
n1 x + n2 y + n3 z = b
wobei die n j nicht alle Null sind. Der Vektor (n1 , n2 , n3 ) ist senkrecht auf der Ebene.
Als Inzidenzrelationen definieren wir das Enthaltensein. Die Inzidenzaxiome werden Aussagen
über Lösungsmengen linearer Gleichungssysteme. Sie lassen sich leicht nachprüfen.
27
Grundlagen nach Euklid und Hilbert
Für die Zwischenrelation wählen wir die offensichtliche Zwischenrelation auf den reellen Zahlen
zusammen mit (1). Die Axiome II.1 , II.2 und II.3 lassen sich leicht nachprüfen. Schwieriger ist
Axiom II.4.
Wir definieren die Länge eines Vektor durch
2
x
y = x 2 + y2 + z2
z und nennen zwei Strecken kongruent, wenn sie gleich lang sind.
Wir nennen zwei Winkel kongruent, wenn der Cosinus der Winkel übereinstimmt, d.h. wenn die
entsprechenden Seitenverhältnisse in rechtwinkligen Dreiecken übereinstimmen. Damit gelten die
Kongruenzaxiome.
Das Parallenaxiom ist nun eine Aussage über die Lösbarkeit linearer Gleichungssysteme. Das
Axiom des Archimedes und das Vollständigkeitsaxiom folgen direkt aus (1).
Wir erhalten den Satz
33 Satz Der Raum R3 genügt Hilberts Axiomen. Zu je zwei Räumen, die Hilberts Axiomen
genügen, gibt es eine Ähnlichkeitsabbildung.
2.10 Der Flächeninhalt
Wir wollen ebenen einfachen Figuren einen Flächeninhalt zuordnen, genauso wie Polyedern im
Raum. Im folgenden bewegen wir uns in einer festen Ebene. Wir betrachten ab jetzt Geraden,
Strecken, Ebenen, und Dreiecke als die Menge ihrer Punkte (die letzteren einschließlich Kanten
und Ecken). Euklid geht von folgenden Annahmen (Axiomen) über den Inhalt aus:
1) Kongruente Figuren haben gleichen Inhalt.
2) Vereinigungen kongruenter Figuren haben gleichen Inhalt.
3) ’Differenzen’ kongruenter Figuren haben gleichen Inhalt.
4) Hälften gleicher Figuren haben gleichen Inhalt
5) Der Inhalt eines Ganzen ist größer als der eines Teiles.
6) Haben zwei Quadrate gleichen Inhalt so sind sie kongruent.
Etwas anders als oben verstehen wir eine Figur als eine endliche Vereinigung von nichtüberlappenden Dreiecken.
34 Proposition Der Schnitt und die Vereinigung zweier Figuren ist eine Figur. Das Komplement einer Figur in einer anderen Figur ist eine Figur.
28
Grundlagen nach Euklid und Hilbert
35 Definition Zwei Figuren heißen gleichzerlegbar, wenn sie als endliche Vereinigungen nichtüberlappender kongruenter Dreiecke geschrieben werden können.
Wir sagen, die Figuren P und P0 haben gleichen Inhalt, falls Figuren Q und Q0 existieren, so dass
P und Q sowie P0 und Q0 nichtüberlappen, und Q und Q0 sowie P ∪ Q und P0 ∪ Q0 gleichzerlegbar
sind.
36 Satz Die Figuren P und P0 sind genau dann gleichzerlegbar, wenn sie gleichen Inhalt haben.
Der Beweis ist erstaunlich schwierig, da man nicht leicht sieht, dass verschiedene Zerlegungen
zur gleichen Summe führen,
Der Flächeninhalt ist eine Abbildung, die jeder Figur eine positive reelle Zahl zuordnet mit den
Eigenschaften
1) Kongruente Dreiecke haben den gleichen Flächeninhalt.
2) Der Flächeninhalt der Vereinigung nichtüberlappenden Figuren ist die Summe der Flächeninhalte der Figuren.
37 Satz Wir wählen eine Kongruenzklasse, die wir 1 nennen. Dann gibt es genau einen
Flächeninhalt, der Dreiecken den Flächeninhalt 21 mal Seitenlänge mal Höhe zuordnet. Zwei
Figuren haben genau dann gleichen Flächeninhalt, wenn sie gleichzerlegbar sind.
Beweis:
Beweisskizze.
1) Sei ABC ein Dreieck. Dann ist das obige Produkt unabhängig von der Wahl der Seite.
Damit definieren wir den Flächeninhalt von Dreiecken wie im Satz.
2) Wenn man ein Dreieck als nichtüberlappende Vereinigung kleiner Dreicke darstellt, dann
ist der Flächeninhalt die Summe der Flächeninhalte der kleinen Dreiecke.
3) Zu zwei Zerlegungen einer Figur in eine Vereinigung kleinerer Dreiecke gibt es eine gemeinsame feinere Zerlegung in Dreiecke.
Der Flächeninhalt eines Rechtecks ist - als Vereinigung zweier Dreiecke - das Produkt der Seitenlängen. Insbesondere können wir den arithmetischen Satz des Pythagoras als die übliche Aussage
über Flächeninhalte von Quadraten interpretieren - und auch über Zerlegungen beweisen.
29
Elementargeometrische Figuren
6. Vorlesung am 15. Mai 2012
3 Elementargeometrische Figuren
3.1 Das Dreieck
Wir bezeichnen das Dreieck mit den Ecken A, B und C mit ABC und die Mittelpunkte der Seiten
AB, AC und BC entsprechend der jeweils gegenüberliegenden Ecke mit MC , MB und M A . Wie
zuvor verwenden wir für Dreieckswinkel die Abkürzung ∠ A, ∠ B und ∠C. Wir sammeln bereits
bewiesene Aussagen.
1) (SSS) Zwei Dreiecke sind kongruent, wenn entsprechende Seiten gleich lang sind.
2) (SWS) Zwei Dreiecke sind kongruent, wenn jeweils zwei Seiten und die eingeschlossenen
Winkel kongruent sind.
3) (WSW) Zwei Dreiecke sind kongruent, wenn jeweils eine Seite und die zwei entsprechende
Winkel kongruent sind.
4) (SSW) Zwei Dreiecke sind kongruent, wenn jeweils zwei Seiten und die der längeren Seite
gegenüberliegenden Winkel kongruent sind.
5) Die Winkelhalbierenden treffen sich im Inkreismittelpunkt PW H .
6) Die Winkelsumme ist die Summe zweier rechter Winkel.
7) Die Mittelsenkrechten treffen sich im Umkreismittelpunkt PMS .
8) Liegt C auf dem Thaleskreis durch A und B, das heißt auf dem Kreis durch A und B,
dessen Mittelpunkt auf einer Geraden mit A und B zwischen diesen beiden Punkten liegt,
so ist ∠C ein rechter Winkel.
9) (WWW) Zwei Dreiecke sind ähnlich, wenn jeweils zwei entsprechende Winkel kongruent
sind.
10) (SWS) Zwei Dreiecke sind ähnlich, wenn jeweils entsprechende zwei Seiten proportional
und die eingeschlossenen Winkel kongruent sind.
11) (SSW) Zwei Dreiecke sind ähnlich, wenn jeweils zwei Seiten proportional und die der
längeren Seite gegenüberliegenden Winkel kongruent sind.
12) (SSS) Zwei Dreiecke sind ähnlich, wenn entsprechende Seiten proportional sind.
13) Im rechtwinkligen Dreieck gilt der Satz des Pythagoras.
30
Elementargeometrische Figuren
Die Höhen eines Dreiecks sind die Lote auf die Dreiecksseiten durch die jeweils gegenüberliegenden Eckpunkte. Den Fußpunkt des Lotes durch A auf BC nennen wir H A , und ebenso definieren
wir HB und HC .
38 Satz
Sei ein Dreieck ABC mit rechtem Winkel ∠C gegeben. Dann gilt
| BC |2 = | BHC || AB|, | AC |2 = | AHC || AB|
Kathetensatz
und
|CHC |2 = | AHC || BHC |
Höhensatz.
Beweis:
Dies folgt aus den Ähnlichkeitssätzen und hat den Satz des Pythagoras zur Konsequenz.
Setzt man letzteren als bekannt voraus, so kann man damit (und mit der ersten binomischen
Formel) den Höhensatz und daraus wiederum den Kathetensatz beweisen.
Außerdem existieren für beide Aussagen geometrische Beweise mittels Scherungen, und für den
Höhensatz auch durch Ergänzung.
Der Flächeninhalt eines Dreiecks ABC ist gegeben durch
V=
1
1
1
| AB||CHC | = | BC || AH A | = | AC || BHB |.
2
2
2
Man kann ihn jedoch auch unabhängig von der Höhe berechnen, wie die folgende Formel zeigt.
39 Satz (Heron’sche Formel) Der Flächeninhalt des Dreiecks ABC ist
p
(| AB| + | AC | + | BC |)(| AB| + | AC | − | BC |)(| AB| − | AC | + | BC |)(−| AB| + | AC | + | BC |)
V=
.
4
Beweis:
Wir drücken die Höhe |CHC | durch die Seitenlängen | AB|, | AC | und | BC | aus und betrachten
oBdA die Situation, dass HC zwischen A und B liegt.
Sei x := | BHC |. Nach Pythagoras ist x2 + |CHC |2 = | BC |2 und (| AB| − x )2 + |CHC |2 = | AC |2 ,
also
|CHC |2 = | BC |2 − x2 = | AC |2 − (| AB| − x )2
und somit
x=
| AB|2 − | AC |2 + | BC |2
.
2| AB|
Daraus folgt
| AB|2 − | AC |2 + | BC |2 2
)
2| AB|
(| AB| + | AC | + | BC |)(| AB| + | AC | − | BC |)(| AB| − | AC | + | BC |)(−| AB| + | AC | + | BC |)
=
4| AB|2
|CHC |2 = | BC |2 − (
31
Elementargeometrische Figuren
und wir erhalten für den Flächeninhalt
1
| AB|2 |CHC |2
4
(| AB| + | AC | + | BC |)(| AB| + | AC | − | BC |)(| AB| − | AC | + | BC |)(−| AB| + | AC | + | BC |)
=
16
V2 =
wie behauptet.
Man schreibt oft p =
| AB|+| AC |+| BC |
2
V=
40 Satz
q
und hat also die Heron’sche Formel in der Form
p( p − | AB|)( p − | AC |)( p − | BC |).
Der Flächeninhalt V eines Dreiecks ABC genügt der Abschätzung
V≤
(| AB| + | AC | + | BC |)2
√
12 3
mit Gleichheit genau dann wenn das Dreieck gleichseitig ist.
Beweis:
Die Ungleichung zwischem arithmetischem und geometrischem Mittel besagt
x1 x2 x3 ≤
x1 + x2 + x3
3
3
und damit für x1 = (| AB| + | AC | − | BC |), x2 = (| AB| − | AC | + | BC |) und x3 = (−| AB| +
| AC | + | BC |)
| AB| + | AC | + | BC | 3
x1 x2 x3 ≤
.
3
Auf Grund der Heron’schen Formel ergibt das
q
1
V=
(| AB| + | AC | + | BC |) x1 x2 x3
4s
1
| AB| + | AC | + | BC | 3 (| AB| + | AC | + | BC |)2
√
≤
(| AB| + | AC | + | BC |)
=
.
4
3
12 3
Daraus folgt dass das gleichseitige Dreieck unter allen Dreiecken gleichen Umfangs den größten
Flächeninhalt hat.
Neben dem Umkreismittelpunkt und dem Inkreismittelpunkt gibt es noch weitere ausgezeichnete
Punkte in einem Dreieck.
41 Satz (Satz vom Höhenschnittpunkt)
einem Punkt PH .
Die drei Höhen eines Dreiecks schneiden sich in
32
Elementargeometrische Figuren
Beweis:
Das Mittendreieck ist das Dreieck, dessen Ecken die Mittelpunkte des Dreiecks ABC sind. Die
Höhen des Mittendreiecks sind die Mittelsenkrechten des grossen Dreiecks. Da jedes Dreieck Mittendreieck eines größeren Dreiecks ist, folgt die Aussage aus der Aussage über den Schnittpunkt
der Mittelsenkrechten.
Die Gerade durch den Mittelpunkt einer Seite und den gegenüberliegenden Eckpunkt nennen
wir Seitenhalbierende.
42 Satz (Satz von den Seitenhalbierenden) Die drei Seitenhalbierenden schneiden sich
in einem Punkt PSH , genannt Schwerpunkt. Dieser Punkt unterteilt jede Seitenhalbierende im
Verhältnis 2 : 1 von der Ecke aus gesehen.
C
MA
MB
PSH
A
MC
B
Beweis:
Wir zeigen: BMB teilt AM A im Verhältnis 2 : 1. Da das Argument auf alle Seitenhalbierenden
angewandt werden kann folgt die volle Aussage. Die Dreiecke MB M A C und ABC sind nach SWS
ähnlich, so dass | AB| : | MB M A | = 2 : 1. Außerdem ist MB M A parallel zu AB. Nach WWW sind
damit die Dreiecke MB M A PSH und ABPSH ähnlich. Dann folgt aber
( APSH ) : ( PSH M A ) = ( AB) : ( MB M A ) = 2 : 1.
C
e
P
PMS PSHW H PH
B
A
33
Elementargeometrische Figuren
43 Satz (Eulergerade)
Die Punkte PH , PSH und PMS liegen auf einer Geraden, der sogenannten Eulergeraden. Es gilt das Verhältnis | PH PSH | : | PSH PMS | = 2 : 1.
Beweis:
Wir betrachten die Skizze (hier im gleichschenkligen Dreieck, was jedoch ohne Bedeutung ist):
C
PH M A = H A
PMS
A
MC
PSH
HC
B
Auf AB sind die Strecken CPH (Teil der Höhe) und MC PMS (Teil der Mittelsenkrechten) senkrecht und damit zueinander parallel. Genauso stehen APH und M A PMS senkrecht auf BC und
sind also zueinander parallel. Außerdem sind nach dem Satz über die Seitenhalbierenden die Strecken AC und MC M A zueinander parallel mit | AC | : | MC M A | = 2 : 1. Es folgt, dass die Dreiecke
APH C und MC M A PMS ähnlich sind, und deshalb |CPH | : | MC PMS | = | AC | : | MC M A | = 2 : 1.
Der Winkel ∠ HC CMC ist kleiner als ein rechter Winkel. Damit liegen PH und PMS auf verschiedenen Seiten des Schwerpunktes.
Sei P∗ der Schnittpunkt der Geraden durch PH und PMS mit der Seitenhalbierenden CMC . Dann
ist ∠ PH P∗ C ≡ ∠ MC P∗ PMS als Scheitelwinkel und ∠ PH CP∗ ≡ ∠ PMS MC P∗ als Wechselwinkel.
Also sind die Dreiecke CPH P∗ und MC PMS P∗ nach WWW ähnlich mit
|CP∗ | : | MC P∗ | = |CPH | : | MC PMS | = 2 : 1
und
| PH PSH | : | PSH PMS | = |CPH | : | MC PMS | = 2 : 1.
Nach der ersten Gleichheit wird also die Seitenhalbierende CMC von P∗ im Verhältnis 2 : 1
geteilt, und deshalb ist P∗ = PSH . Die zweite Gleichheit zeigt, dass PH PMS von P∗ = PSH im
Verhältnis 2 : 1 geteilt wird.
44 Satz (Feuerbach’scher Kreis)
Die Seitenmittelpunkte, die Höhenfußpunkte und die
Mittelpunkte der Strecken APH , BPH und CPH liegen auf einem Kreis, genannt Neun-PunktKreis oder Feuerbach’scher Kreis. Der Mittelpunkt des Feuerbach’schen Kreises liegt in der Mitte
zwischen PH und PMS und damit auf der Euler’schen Geraden. Der Radius ist die Hälfte des
Radius des Umkreises.
34
Elementargeometrische Figuren
EulerscheGerade
C
Umkreis
M1
HA
HB
PH
MA
MB
F
PSH
M2
PMS
HC
A
M3
MC
B
Beweis: Siehe [1].
Wir definieren den Cosinus eines Winkels als das Verhältnis zwischen Ankathede und Hypotenuse
eines rechtwinkligen Dreiecks mit dem negativen Vorzeichen, falls der Winkel größer als ein
rechter Winkel ist. Der Sinus ist das Verhältnis zwischen Kathede und Hypotenuse. Nach dem
Satz von Pythagoras gilt
sin2 ∠ A + cos2 ∠ A = 1.
Wir nennen Strecken gleich lang, wenn sie kongruent sind. Wir nennen Winkel gleich groß, wenn
sie kongruent sind.
Es gilt der Sinussatz.
45 Satz (Sinussatz)
Es gilt
sin(∠ B)
sin(∠C )
sin(∠ A)
=
=
.
| BC |
| AC |
| AB|
Beweis:
Wir teilen das Dreieck ABC durch die Höhe CHC in zwei rechtwinklige Dreiecke, in denen wir
die Definition des Sinus verwenden:
sin(∠ A) = |CHC | : | AC |, sin(∠ B) = |CHC | : | BC |
und daher
| AC | sin(∠ A) = |CHC | = | BC | sin(∠ B).
Daraus folgt die Aussage.
35
Elementargeometrische Figuren
Knotenpentagon
C
D
B
E
A
Wir nennen die Ecken gegen Uhrzeigersinn A, B, C, D und E und nehmen A nach unten.
Wir entnehmen der Konstruktion: Die Strecken AD, CE, AC und BD sind alle parallel zu einer
Seite des Fünfecks.
Es gilt aufgrund der Faltung
∠ DEA ≡ ∠EAB ≡ ∠ ABC,
∠ BCD ≡ ∠CDE
und
∠ ABD ≡ ∠ DAB ≡ ∠EAC ≡ ∠CEA
sowie
∠EAD ≡ ∠ DEC.
Daraus wollen wir die Kongruenz der Kanten und der Winkel in allen Eckpunkten herleiten.
1) Aus der Parallelität und der Kongruenz von Winkeln folgt
EA ≡ CB
AB ≡ DE
also sind mit WSW die Dreiecke ABC und ADE kongruent, und damit AC ≡ AD.
2) Da die Basiswinkel kongruent sind, sind die Dreiecke ABD und EAC gleichschenklig, und
damit
EC ≡ AC ≡ AD ≡ BD.
Mit der Kongruenz der Basiswinkel folgt ∠ BDA ≡ ∠ ACE und mit SWS die Kongruenz
der Dreiecke ABD und EDC, und damit die Kongruenz
CD ≡ EA ≡ AB ≡ DE.
36
Elementargeometrische Figuren
3) Mit SWS folgt die Kongruenz der Dreiecke ADE und ECD, und damit sind alle Kanten
und alle Winkel kongruent.
37
Elementargeometrische Figuren
7. Vorlesung am 22. Mai 2012
3.2 Kreise
Inversion am Kreis
46 Definition Wir betrachten einen Kreis K mit Mittelpunkt O und Radius r in der Ebene
und definieren eine Abbildung, die Inversion am Kreis, die die Punkte der Ebene ohne O auf
die Ebene ohne O abbildet. Sei A 6= O ein Punkt der Ebene. Das Bild A0 ist der Punkt auf dem
Strahl von O nach A mit
|OA||OA0 | = r2 .
Wir nennen A0 den zu A inversen Punkt.
Konstruktion:
P
O
A
A0
Q
Beobachtungen:
1) Geraden durch O werden auf sich selbst abgebildet.
2) Geraden, die O nicht enthalten, werden auf Kreise abgebildet, die O enthalten.
3) Kreise, die O enthalten, werden auf Geraden abgebildet, die O nicht enthalten.
4) Eine zweimalige Inversion ergibt die identische Abbildung.
Die erste Aussage folgt aus der Konstruktion. Die zweite und die dritte Aussage ergeben sich
aus der folgenden Skizze.
38
Elementargeometrische Figuren
B
B0
O
A0
A
Wir definieren den Winkel des Schnittpunktes zweier Kreise als den Winkel der Tangenten,
und genauso den Winkel zwischen einem Kreis und einer Geraden. Im Moment betrachten wir
maximal rechte Winkel.
47 Lemma Schneidet ein Kreis S den Kreis K in einem rechten Winkel, so wird S bei der
Inversion am Kreis K auf sich abgebildet. Enthält ein Kreis S ein Paar inverser Punkte bezüglich
K, so ist S senkrecht auf K.
Beweis:
Wir betrachten zunächst
B
O
A
C
C0
und behaupten:
(2)
| AB|2 = | AC || AC 0 |
(Sekantenformel).
Dazu zeigen wir, dass die Dreiecke ACB und ABC 0 ähnlich sind - woraus die Formel sofort folgt.
Für die Ähnlichkeit wiederum genügt es aufgrund des Ähnlichkeitssatzes WWW die Kongruenz
∠ ABC ≡ ∠ AC 0 B nachzuweisen, was im folgenden geschieht.
39
Elementargeometrische Figuren
Die Winkel in O addieren sich zu vier rechten Winkeln auf. Mit der Winkelsumme im Dreieck
und der Gleichheit der Basiswinkel im gleichschenkligen Dreieck ergibt sich als Summe ∠OCC 0 +
∠OC 0 B + ∠OBC ein rechter Winkel (im folgenden abgekürzt als π2 ). Aufgrund der Konstruktion
ist ∠OBA ein rechter Winkel, also
∠CBA = π/2 − ∠OBC = ∠OC 0 B + ∠OCC 0 = ∠ AC 0 B.
Diese Argumentation verwendet die spezielle Konfiguration. Falls der Punkt O außerhalb des
Dreiecks CC 0 B liegt spiegeln wir die Gerade AC and AO.
Wir betrachten nun folgende Skizze.
C
O B
B0
Es folgt
|OB||OB0 | = |OC ||OC |
und B wird auf B0 abgebildet. Umgekehrt: Wird B auf B0 abgebildet, und liegen beide Schnittpunkte auf dem Kreis S, so gibt es zwei Schnittpunkte mit S. Sei C einer der Punkte, für den
eine Tangente durch A existiert. Dann folgt aus (2) und der Definition der Inversion dass C auf
K liegt. Daraus folgt die Behauptung.
48 Lemma
enthält.
Jeder Kreis, der O nicht enthält, wird auf einen Kreis abgebildet, der O nicht
Beweis:
Wir beginnen mit einer Beobachtung. Sei K und K 0 konzentrische Kreise, d.h. Kreise mit dem
gleichen Mittelpunkt O und Radius r und r 0 . Die Inversion an K bilde A auf A0 und die Inversion
an K 0 bilde A0 auf A00 ab. Es gilt
|OA||OA0 | = r2 ,
|OA0 ||OA00 | = (r 0 )2
=⇒ |OA00 | : |OA| = (r 0 /r )2 ,
40
Elementargeometrische Figuren
die Verkettung ist also eine zentrische Streckung, und das ist eine Ähnlichkeitsabbildung (sie
bildet Dreiecke auf ähnliche Dreiecke ab). Jede Ähnlichkeitsabbildung bildet Gerade auf Geraden
ab (das war Teil der Definition) und Kreise auf Kreise (das folgt daraus dass sie Dreiecke auf
ähnliche Dreiecke abbildet).
Sei jetzt K ein Kreis mit Mittelpunkt O und S eine Kreis, der O nicht enthält mit Mittelpunkt
A. Sei S0 der Thaleskreis über OA und P der Punkt auf dem Thaleskreis und einer Tangenten an
S0 , die durch O läuft. Sei K 0 der Kreis mit Mittelpunkt O durch P. Aufgrund der Konstruktion
schneiden sich die Kreise K 0 und S im rechten Winkel.
Die Inversion an K 0 bildet S auf sich selbst ab. Die Komposition mit der Inversion an K bildet
daher S auf das Bild von S unter der Inversion an K ab. Die erste Abbildung ist als Komposition
eine zentrische Streckung, und damit ist das Bild von S unter der Inversion an K ein Kreis, der
O nicht enthält.
49 Lemma Die Inversion am Einheitskreis ist konform (d.h. winkeltreu): Schneiden sich zwei
Kurven (bei uns Geraden oder Kreise) in einem Winkel, so ist der Winkel des Bildes kongruent
dazu.
Beweis:
Die Zahl der Schnittpunkte zweier Geraden, von Gerade oder Kreis, oder Kreisen (wobei wir O
nicht zählen) bleibt bei der Inversion gleich. Tangentialität bleibt erhalten. Sei P nicht auf K.
Wir wählen zwei Kreise, die P enthalten , und K senkrecht schneiden, und in P tangential zu
den beiden Kurven sind. (Warum gibt es das?). Da Tangentialität erhalten bleibt, genügt es,
den Winkel des Schnittpunktes P0 des Bildes zu betrachten. Die beiden Kreise werden auf sich
selbst abgebildet, und damit sind die Winkel kongruent.
Liegt P auf dem Kreis dann schalten wir eine Inversion an einem zweiten Kreis mit gleichem
Mittelpunkt vor. Die Komposition der beiden Inversionen ist eine zentrische Streckung, die
Winkel erhält. Die erste Inversion erhält den Winkel. Damit folgt die Behauptung.
Das Doppelverhältnis
50 Definition Für vier verschiedene Punkte A, B, P und Q der Ebene definieren wir das
Doppelverhältnis
| AP| | BP|
( AB, PQ) =
:
.
| AQ| | BQ|
51 Lemma Die Inversion am Kreis verändert das Doppelverhältnis nicht: Ist K ein Kreis mit
Mittelpunkt O, A, B, P und Q vier verschiedene und von O verschiedene Punkte, A0 , B0 , P0 und
Q0 die Bilder unter der Inversion, so gilt
( AB, PQ) = ( A0 B0 , P0 Q0 )
41
Elementargeometrische Figuren
Beweis:
Seien Punkte A, P und ihre Bilder A0 und P0 gegeben. Dann folgt
|OA||OA0 | = r2 = |OP||OP0 |
und |OA| : |OP| = |OP0 | : |OA|.
Seien nun O, A und P nicht kollinear. Dann sind die Dreiecke OAP und OP0 A0 wegen SSS
ähnlich und | AP| : | A0 P0 | = |OA| : |OP0 |.
Sind O, A und P kollinear so folgt die gleiche Aussage mit Differenzenbildung.
Ist Q ein weiterer Punkt so folgt auch
| AQ| : | A0 Q0 | = |OA| : |OQ0 |
und daher
| AQ|
|OQ0 |
| AP|
:
=
.
| A0 P0 | | A0 Q0 |
|OP0 |
Ist B ein weiterer Punkt, so können wir A in der Formel durch B ersetzen. Sortieren von gestrichenen und ungestrichenen Termen in der dadurch erhaltenen Identität ergibt die Invarianz des
Doppelverhältnisses.
52 Lemma Seien zwei Kreise mit verschiedenen Mittelpunkten gegeben. Die Mittelpunkte aller
Kreise, die diese Kreise senkrecht schneiden, liegen auf einer Geraden, die Radikalachse genannt
wird. Sie ist senkrecht auf der durch die Mittelpunkte definierten Geraden. Ist K ein dritter Kreis,
der beide Kreise in jeweils zwei Punkten A, B A0 und B0 schneidet, so liegt der Schnittpunkt der
durch AB und A0 B0 definierten Geraden auf der Radikalachse.
Die Skizze veranschaulicht die Aussage des Lemmas.
Radikalachse
O
O0
42
Elementargeometrische Figuren
Beweis:
Schritt 1. Eine mehrfache Anwendung der Sekantenformel zeigt, dass der Schnittpunkt der
beiden Geraden Mittelpunkt eines Kreises ist, der beide gegebenen Kreise orthogonal schneidet.
Schritt 2. Die orthogonale Projektion eines Mittelpunktes auf die Gerade durch die Mittelpunkte hängt nicht vom gewählten dritten Kreis ab. Das folgt mit einer mehrfachen Anwendung
des Satzes von Pythagoras.
Kreise, die drei Bedingungen genügen
Ein Teil der Konstruktionen der Kreise wird angegeben, andere haben wir bereits gesehen. Ich
empfehle, die restlichen Konstruktionen selbst durchzuführen.
1) (PPP) Seien drei nicht kollineare Punkte A, B und C gegeben. Dann gibt es genau einen
Kreis durch diese Punkte, den Umkreis.
2) (ggg) Zu drei Geraden, die sich in drei verschiedenen Punkten schneiden, gibt es genau
vier Kreise, die die Geraden als Tangenten haben. Konstruktion durch Winkelhalbierende.
3) (PPg) Zu einer Geraden und zwei verschiedenen Punkten, die auf einer Seite der Gerade
liegen, gibt es einen oder zwei Kreise, die die Punkte enthalten, und die Gerade als Tangente
haben.
Konstruktion: Der Mittelpunkt liegt auf der Mittelsenkrechten der beiden Punkte. Wir
einen Punkt A auf der Mittelsenkrechten, der auf der Seite der zwei Punkte liegt, und
43
Elementargeometrische Figuren
konstruieren einen Kreis, der die Gerade als Tangente hat. Dieser enthält nicht notwendigerweise die beiden Punkte. Also strecken wir den Kreis am Schnittpunkt der Mittelsenkrechte und der Geraden (falls sie sich schneiden) oder wir verschieben den Kreis (falls sie
parallel sind).
Frage: Wo liegt der zweite Kreis?
4) (Pgg) Zu zwei sich schneidenden Geraden und einem Punkt, der nicht auf den Geraden
liegt, gibt es genau zwei Kreise, die den Punkt enthalten, und die Geraden als Tangenten
haben. Die Aussage bleibt richtig für parallele Geraden, wenn der Punkt zwischen den
Geraden liegt.
Konstruktion: Liegt P auf der Winkelhalbierenden so ist die Kontruktion einfach. Im anderen Fall sei P0 der an der Winkelhalbierenden gespiegelte Punkt. Wir konstruieren (PPg)
und erhalten die Konstruktion.
5) (ggK) Zu zwei sich schneidenden Geraden und einem Kreis gibt es höchstens 8 Kreise, die
tangential zu Kreis und Geraden sind.
44
Elementargeometrische Figuren
Konstruktion eines Kreises in dem Fall, dass der Kreis die Geraden nicht schneidet. Wir
konstruieren Geraden, die um den Radius vom Kreis weg verschoben sind. Zu diesen neuen
Geraden und dem Mittelpunkt konstruieren wir den Mittelpunkt von (ggP). Der Kreis mit
diesem Mittelpunkt, der die Geraden als Tangenten hat, löst unser Problem.
6) (PPK) Zu einem Kreis und zwei Punkten, die beide im Inneren oder im Äußeren des
Kreises liegen, gibt es genau zwei Kreise, die beide Punkte enthalten, und die tangential
zum Kreis sind.
7) (KKK), (Problem des Apollonius) Zu drei Kreisen mit verschiedenen Mittelpunkten existieren genau 8 Kreise, die tangential zu den drei Kreisen sind.
Konstruktion im Fall, dass sich genau zwei der Kreise schneiden.
Wir wählen einen Schnittpunkt und konstruieren einen Kreis mit diesem Mittelpunkt,
der den dritten Kreis senkrecht schneidet. Eine Inversion an diesem Kreis überführt das
Problem in (ggK).
Die übrigen Konfigurationen sind ( PgK ), ( PKK ) und ( gKK ).
Weitere Eigenschaften des Kreises
1) (Peripheriewinkelsatz) Der Mittelpunktswinkel ist doppelt so groß wie der Peripheriewinkel. Der Peripheriewinkel über einer Sehne hängt nicht vom Punkt auf dem Kreis ab. Ist
ABC ein Dreieck mit Umkreismittelpunkt O, so liegt D genau dann auf dem Kreis auf der
gleichen Seite wie C, wenn der Winkel ∠ BDA ≡ ∠ BCA.
2) Ein Spezialfall ist der Satz des Thales.
3) Im Sehnenviereck ist die Summe zweier gegenüberliegender Winkel die Summe zweier rechter Winkel. Die Ecken eines Vierecks liegen genau dann auf einem Kreis wenn die Summe
gegenüberliegender Winkel die Summe zweier rechter Winkel ist.
45
Elementargeometrische Figuren
4) In einem Tangentenviereck ist die Summe gegenüberliegender Seiten gleich. Umgekehrt ist
jedes konvexe Viereck mit diese Eigenschaft ein Tangentenviereck.
46
Elementargeometrische Figuren
8. Vorlesung am 5. Juni 2012
3.3 Das Poincaré-Modell der hyperbolischen Ebene
Wir definieren eine Geometrie, in der alle ebenen Axiome von Hilbert (damit sind alle Aussagen der Axiome gemeint, die für eine Ebene formuliert werden könnten) mit Ausnahme des
Parallelenaxioms gelten.
53 Definition Wir betrachten einen Kreis K in einer Ebene. P-Punkte sind die Punkte im
Inneren des Kreises. Als P-Geraden bezeichnen wir Geraden durch den Mittelpunkt, und Kreise,
die K senkrecht schneiden.
O
Verifikation der ebenen Inzidenzaxiome
K
O
A
O0
S
Sei S ein Kreis, der K senkrecht schneidet. Dann ist das Inverse unter K des Mittelpunktes der
beiden Schnittpunkte der Kreise der Mittelpunkt von S. Insbesondere liegt der Mittelpunkt von
S außerhalb von K, und genauso liegt der Mittelpunkt von K außerhalb von S.
Die Inzidenzrelation definieren wir über das Enhaltensein.
Axiom I1 sagt: Jede P-Gerade enthält mindestens zwei P-Punkte. Zu zwei Punkten existiert
genau eine P-Gerade. Es gibt drei P-Punkte, die nicht auf einer Geraden liegen.
47
Elementargeometrische Figuren
Nur die zweite Aussage ist nicht sofort offensichtlich. Seien zwei P-Punkte A und B gegeben.
Zunächst betrachten wir den Fall, dass O, A und B nicht auf einer Geraden liegen. Dann sei A0
der zu A bezüglich K inverse Punkt. Nach Lemma 47 schneidet der Kreis durch die drei Punkte
den Kreis K senkrecht und definiert die P-Gerade, die A und B enthält. Falls O, A und B auf
einer Geraden liegen, dann definiert diese Gerade eine P-Gerade.
Zwei verschiedene P-Geraden, die auf Geraden liegen, schneiden sich nur im Mittelpunkt. Zwei
Kreise, die zu verschiedenen P-Geraden liegen, schneiden sich höchsten in zwei Punkten. In
diesem Fall werden die Punkte bei der Inversion an K aufeinander abgebildet, und nur einer der
Punkt liegt im Inneren.
Ist S ein Kreis und a eine Gerade, die jeweils P Geraden definieren. Falls sie zwei Schnittpunkte
haben liegt wie bei den Kreisen einer im Inneren.
Die Zwischenaxiome
Wir führen die Zwischenrelation auf die Hilbertsche Zwischenrelation zurück. Enthält eine PGerade b den Mittelpunkt, so ist sie Teil einer Euklidschen Gerade, und B liegt zwischen A und
B, wenn dies für die Euklidsche Gerade gilt.
Im anderen Fall existiert eine Gerade a durch den Mittelpunkt, die senkrechte zu den Mittelpunkten O und O0 der Kreise durch O. Wir ordnen jedem P-Punkt B den Schnittpunkt von a
und der Geraden durch den Punkt und O0 zu. Nun definieren wir die Zwischenrelation durch die
Zwischenrelation der Punkte auf der Geraden.
1) Liegt B zwischen A und C, so liegt B auch zwischen C und A.
2) Zu zwei verschiedenen P-Punkten A und B gibt es einen P-Punkt, der zwischen A und B
liegt, und einen P-Punkt C, so dass B zwischen A und C liegt.
3) Liegen die drei paarweise verschiedenen P-Punkte A, B, C auf der P-Geraden g, so liegt
genau einer der drei Punkte zwischen den beiden anderen Punkten.
4) (Pasch) Seien A, B, C drei nicht auf einer P-Gerade liegende Punkte, a eine P-Gerade in
der zu A, B, C gehörenden Ebene, die keinen der drei Punkte enthält, aber einen Punkt
aus AB. Dann enthält a entweder einen Punkt aus BC oder einen Punkt aus CA, aber
nicht beides.
Die Axiome II.1 – II.3 folgen direkt aus der Definition.
Das Seiten einer P-Geraden sind die Seiten der Euklidschen Geraden (wenn die P-Gerade den
Mittelpunkt enthält) bzw das Innere und das Äußere im anderen Fall. Daraus folgt das Axiom
von Pasch.
Damit erhalten wir P-Strecken und P-Halbstrahlen, die mit Hilfe der Axiome definiert worden
waren.
48
Elementargeometrische Figuren
Die Kongruenzaxiome
Seien P und Q die Schnittpunkte der P-Geraden durch A und B mit K, wobei P näher an A als
an B liegen soll, und P0 und Q0 die analogen Punkte für A0 und B0 .
P
A
B
Q
Wir sagen, die P-Strecken AB und A0 B0 sind kongruent, falls die Doppelverhältnisse gleich sind
( AB, PQ) = ( A0 B0 , P0 Q0 )
Dieser Kongruenzbegriff ist offensichtlich eine Äquivalenzrelation.
Die Kongruenz von P-Winkeln definieren wir über die Kongruenz der Winkeln der Tangenten.
Die Inversion an einem zu einer P-Gerade gehörenden Kreis bildet den Rand des PoincaréModells nach Lemma 47 auf sich ab - und da der Mittelpunkt im Äußeren dieses Kreises liegt,
wird das Poincaré-Modell auf sich abgebildet. Der die Inversion konform ist werden P-Geraden
auf P Geraden abgebildet. Nach Lemma 51 bleibt das Doppelverhältnis invariant, und damit
ist eine Strecke P-kongruent zu ihrer Inversion. Nach Lemma 49 ist jeder Winkel kongruent zu
dem Bild unter der Inversion. Aus Lemma 47 folgt, dass P-Geraden auf P-Geraden abgebildet
werden.
Wir nennen die Inversion an einem zu einer P-Geraden gehörenden Kreis P-Spiegelung. Auch die
Spiegelung an einer Geraden durch den Mittelpunkt nennen wir P-Spiegelung. Die P-Spiegelung
ist eine Kongruenzabbildung, und diese bilden wieder eine Gruppe.
Wir können jeden Punkt durch eine P-Spiegelung auf den Mittelpunkt abbilden. Dazu betrachten
wir das folgende Bild, in der die angegebene P-Gerade die gewünschte Eigenschaft hat.
O
A
49
Elementargeometrische Figuren
Genauso sind Drehungen Kongruenzabbildungen, da sie die euklidschen Abstände und damit
das Doppelverhältnis nicht verändern.
Inzidenzen bleiben erhalten, genauso wie die Zwischenrelation.
Nach diesen Vorbereitungen prüfen wir die Kongruenzaxiome nach.
1) Sind A, B zwei verschiedene P-Punkte auf der P-Geraden a und A0 ein Punkt auf einer
Geraden a0 , dann gibt es genau einen Punkt B0 auf einer gegebenen Seite von a , so dass
A0 B0 kongruent ist zu AB . Es gilt stets, dass AB kongruent zu AB und zu BA ist.
Nach einer oder zwei Inversionen an P Geraden erreichen wir A = A0 ist der Mittelpunkt
des Kreises. Eine Rotation läßt sich als Verkettung zweier Spiegelungen an P-Geraden
durch den Mittelpunkt darstellen. Dadurch wird a auf a0 abgebildet.
2) Ist AB kongruent zu A0 B0 und A0 B0 kongruent zu A00 B00 so ist AB kongruent zu A00 B00 .
3) Seien AB und BC zwei P-Strecken ohne gemeinsame Punkte auf a, A0 B0 und B0 C 0 zwei PStrecken ohne gemeinsame Punkte auf a0 . Sind AB und A0 B0 sowie BC und B0 C 0 kongruent,
so sind auch AC und A0 C 0 kongruent.
Liegt C zwischen A und B, und sind P und Q bzw P0 und Q0 wie bei der Definition der
Kongruenz, so gilt
| AP|| BQ|
| AQ|| BP|
| AP||CQ| |CP||CQ|
=
| AQ||CP| | BQ|| BP|
( AB, PQ) =
(3)
=( AC, PQ)(CB, PQ)
=( A0 C 0 , P0 Q0 )(C 0 B0 , P0 Q0 )
=( A0 C 0 , P0 Q0 )
Daraus folgt das Axiom III.3.
4) Es sei ∠(h, k) ein P-Winkel und a eine P-Gerade. Sei h ein P-Halbstrahl auf a , der von
einem Punkt O ausgeht. Wir wählen eine Seite von a aus. Dann gibt es genau einen PHalbstrahl k ausgehend von O auf der angegebenen Seite, so dass ∠(h, k ) ≡ ∠(h0 , k0 ). Jeder
Winkel ist zu sich selbst kongruent.
Nach einer Spiegelung dürfen wir annehmen, dass O der Mittelpunkt ist. Dann folgt die
Axiom aus dem Hilbertschen Axiom.
5) Ist ∠(h, k) kongruent zu ∠(h0 , k0 ) und ∠(h0 , k0 ) zu ∠(h, k ), so ist ∠(h, k) kongruent zu
∠(h00 , k00 ).
6) Gelten für die P-Dreiecke ABC und A0 B0 C 0 die Kongruenzen AB ≡ A0 B0 , AC ≡ A0 C 0 und
∠ BAC ≡ ∠ B0 A0 C 0 , so gilt auch ∠ ACB ≡ ∠ A0 C 0 B0 und ∠ ABC ≡ ∠ A0 B0 C 0 .
Nach diversen Inversionen am Kreis dürfen wir annehmen, dass A = A0 der Mittelpunkt,
B = B0 und C = C 0 . Die P-Gerade durch B und C ist eindeutig.
50
Elementargeometrische Figuren
Also sind die Kongruenzaxiome erfüllt und damit gelten alle Folgerungen aus diesen Axiomen
über wie die Existenz von Senkrechten, Mittelsenkrechten, Winkelhalbierenden.
Wir halten fest
54 Satz
Modell.
Die P-Spiegelung an einer P-Gerade ist eine Kongruenzabbildung im Poincaré-
Eine erste von der Euklidschen Geometrie abweichende Aussage ist die Folgende.
55 Lemma
Zu zwei parallelen P-Geraden existiert genau eine gemeinsame Senkrechte.
Beweis:
Sind die zwei P-Geraden durch Kreise gegeben, so suchen wir einen Kreis, der drei gegebene
Kreise S1 , S2 und K senkrecht schneidet, wobei S1 und S2 keine gemeinsamen Punkte haben,
und K senkrecht schneiden. Sei A einer der Schnittpunkte, und σ ein Kreis mit Mittelpunkt A.
Nach Inversion an σ suchen wir einen Kreis, der zwei senkrechte Geraden und einen weiteren
Kreis (der eine der Geraden nicht schneidet) senkrecht schneidet. Dies leistet der Kreis, dessen
Mittelpunkt der Schnittpunkt der Geraden ist, und der den Kreis senkrecht schneidet.
Die Folgerungen aus den Axiomen bleiben richtig. Wir erhalten z.B. Kongruenzsätze für Dreiecke
in der P-Geometrie.
56 Lemma
Die Winkelsumme im Dreieck ist kleiner als π.
Beweis:
Nach einer P-Spiegelung dürfen wir annehmen, dass das A = O eine der Ecken ist. Die Gerade
durch B und C schneidet den die durch B und C definierte P-Gerade in den zwei Punkten B und
C. Die Strecke (Hilbertsche) Strecke BC liegt im Inneren des zur P-Geraden gehörenden Kreises.
Dann sind die Winkel des hyperbolischen Dreiecks kleiner als die des Euklidschen Dreiecks, und
die Summe ist kleiner als die Summe zweier rechter Winkel.
51
Elementargeometrische Figuren
57 Satz (WWW)
Zwei P-Dreiecke mit kongruenten Winkeln sind kongruent.
Beweis:
Nach P-Spiegelungen und Rotationen genügt es, die Aussage für A = A0 = O und gleichen
Halbstrahlen OB und OB0 bzw OC und OC 0 zu zeigen. Ist C = C 0 so muss, da der Winkel sich nur
eindeutig abtragen läßt B = B0 gelten und umgekehrt. Ohne Einschränkung sei |OB| < |OB0 |.
Falls auch |OC | < |OC 0 | so hat das Viereck BCC 0 B0 nach der Annahme an die Winkel die
Winkelsumme 2π. Durch Einziehen einer P-Diagonalen erhalten wir zwei P-Dreiecke, deren
Winkelsumme ab kleiner als π ist, was ein Widerspruch zur Winkelsumme 2π im Viereck ist.
Der Fall |OC 0 | < |OC | bleibt dem Leser als Übungsaufgabe überlassen.
58 Definition
Wir definieren den Abstand
| AB| P = − ln(( AB, PQ))
in der hyperbolischen Ebene.
59 Lemma
| AB| P definiert einen Abstand, d.h es gilt
1) | AB| P = | BA| P .
2) | AB| P ≥ 0 mit Gleichheit genau dann wenn A = B.
3) (Dreiecksungleichung) | AC | P ≤ | AB| P + | AC | P .
Bei 3 gilt Gleichheit genau dann wenn B zwischen A und C liegt.
Beweis:
Die ersten zwei Aussagen folgen direkt aus der Definition. Liegt B zwischen A und C so folgt die
Gleichheit in der Dreiecksungleichung aus den Überlegungen zu Axiom III.3.
Wir betrachten nun den Fall, dass B nicht zwischen A und C liegt, und dass | AC | P ≥ | AB| P
und | AC | P ≥ | BC | P . Sei K A der Kreis um A der B enthält und KC der analoge Kreis um C.
K A schneidet die Gerade durch A und C in einem Punkt A0 mit | AA0 | P = | AB| P . C 0 sei der
Schnittpunkt von KC und der P-Geraden. Es folgt |CC 0 | P = | BC | P .
A0
C0
C
A
B
52
Elementargeometrische Figuren
Mit dem ersten Teil folgt
| AC | P =| AC 0 | P + |C 0 C | P
= | AC 0 | P + | BC | P
= | AA0 | P − | A0 C 0 | P + | BC | P
= | AC | P − | A0 C 0 | P + | BC | p
< | AC | P + | BC | P .
60 Lemma
Jeder P-Kreis ist ein Kreis im Inneren von K und umgekehrt.
Beweis:
Das ist klar, wenn der Mittelpunkt der Mittelpunkt des Poincaré-Modells ist. Das wiederum
kann man durch eine P-Spiegelung erreichen. Kreise werden bei Spiegelungen und Inversionen
(Lemma 48) auf sich selbst abgebildet.
Auch wenn die P-Kreise genau die euklidischen Kreise sind, ist im Allgemeinen der P-Mittelpunkt
nicht gleich dem euklidischen Mittelpunkt.
61 Lemma Zwei Dreiecke sind kongruent wenn die entsprechenden Seiten kongruent sind.
Zu zwei kongruenten Dreiecken existiert eine Kongruenzabbildung, die das eine Dreieck auf das
andere Dreieck abbildet. Diese ist durch die Dreiecke und Angabe der Bilder der Ecken eindeutig
bestimmt.
Beweis:
Die Dreieck ABC und A0 B0 C 0 seien kongruent. Nach zwei P-Spiegelungen dürfen wir A = A0 = O
annehmen, sowie nach einer Drehung B = B0 . Spätestens nach einer weiteren Spiegelung an der
Gerade AB liegen C und C 0 auf der gleichen Seite. Nach Lemma 18 sind sowohl C wie auch C 0
Schnittpunkte zweier Kreise mit Mittelpunkt auf AB, also sind sie gleich.
Seien φ und ψ zwei Kongruenzabbildungen, die A auf A0 , B auf B0 und C auf C 0 abbilden und
D ein weiterer Punkt sowie D 0 und D 00 die Bilder. Diese liegen auf der gleichen Seite (Vergleich
mit C), und sind nach der obigen Überlegung identisch.
Das Parallelenaxiom ist nicht erfüllt. Das Archimedische Axiom folgt aus den Eigenschaften des
Abstandes und dem archimedischen Axiom der reellen Zahlen. Das Dedekindsche Vollständigkeitsaxiom folgt aus dem Dedekindschen Vollständigkeitsaxiom für Geraden.
3.4 Winkeldefekt und Flächeninhalt
Für ein P-Dreieck A, B, und C definieren wir den Winkeldefekt als
δ( ABC ) = π − ∠ ABC − ∠ BCA − ∠CAB
53
Elementargeometrische Figuren
An Dreiecken, deren eine Ecke der Mittelpunkt des Kreise ist, sehen wir δ > 0 falls die Punkte
nicht kollinear sind.
Liegt B zwischen A und C und D ein weitere Punkt, so überzeugt man sich leicht:
δ( ABD ) + δ( BCD ) = δ( ACD ),
d.h. der Winkeldefekt verhält sich wie ein Flächeninhalt.
62 Satz Es gibt eine Flächeninhalt, der auf Dreiecken der Winkeldefekt ist. Bis auf ein Vielfaches hat jeder Flächeninhalt diese Eigenschaft.
Der Beweis ist analog zum Euklidschen Fall. Entscheidend für die Formel ist die Formel bei der
Unterteilung eines Dreiecks in zwei kleiner Dreiecke. Man rechnet leicht nach, dass in diesem
Fall der Winkeldefekt des Dreiecks die Summe der Winkeldefekte der kleinen Dreiecke ist.
Diese Argumentation funktioniert auch im Euklidschen Fall, nur dass dort der Defekt immer
Null ist, während er in der hyperbolischen Ebene immer positiv ist.
3.5 Eine analytische Behandlung des Poincaré-Modells
In diesem Abschnitt streben wir eine analytische Behandlung an. Wir identifizieren die Punkte
im R2 mit komplexen Zahlen. Die Inversion am Kreis mit Mittelpunkt 0 und Radius R hat die
Form
R2
z→
z̄
und die Inversion am Kreis mit Mittelpunkt z0 und Radius R
z0 z̄ − |z0 |2 + R2
R2
=
z → z0 + ¯
z̄ − z̄0
( z − z0 )
Sie hat also die Form
az̄ − b
,
cz̄ − d
wobei weder a und b noch c und d gleichzeitig Null sind und ad 6= bc. Die Multiplikation mit
einem gemeinsamen Faktor verändert die Abbildung nicht und wir nehmen an
!
a b
1 = ad − bc = det
.
c d
z→
Diese Abbildung bildet die Einheitskreisscheibe auf sich ab falls |z0 | > 1 und
| a|2 + ( ab̄ − b ā)i + |b|2 = |c|2 + (cd¯ − c̄d)i + |d|2
genauso wie die analoge Aussage mit −i. Es folgt
| a|2 + |b|2 = |c|2 + |d|2 , und ab̄ − b ā = cd¯ − c̄d.
Es ist eine einfache Konsequenz, dass a 6= 0 und d 6= 0. Wir können den Nenner in der Form
cz̄ − 1
54
Elementargeometrische Figuren
schreiben. Dann hat die Abbildung die Form
Wir können die Abbildung in der Form
z→
(4)
κ (z̄ − c̄)
cz̄ − 1
schreiben wobei |c| < 1 und |κ | = 1. Die Inversion am Kreis mit Mittelpunkt c̄−1 der den
Einheitskreis K senkrecht schneidet hat nun die Form
z→
c
c̄ ( z̄
− c̄
cz̄ − 1
Eine weitere Spiegelung an der x Achse führt auf die Abbildung
z→
(5)
63 Definition
κ (z̄ − c̄)
cz̄ − 1
Wir definieren
D (z, w) =
|z − w|
|wz − 1|
64 Lemma Sei φ eine P-Spiegelung. Dann ist das Bild des Kreises um 0 mit Radius r < 0
der P-Kreis um φ(0) mit Radius r.
Beweis:
Die P-Spiegelung bildet y := φ(0) nach 0 ab. Sie hat die Form (4). Dann hat die P-Spiegellung
die Gestalt
κ (z − y)
z→
(yz − 1)
und es genügt, die Aussage für
z→
κ (z − y)
yz − 1
zu zeigen. Aus
κ (z − y) = |z − y|
r=
(yz − 1) |yz − 1|
folgt die Behauptung.
65 Lemma
Es gilt
d(z, w) = 2 artanh( D (z, w))
Beweis:
55
Elementargeometrische Figuren
Mit einer zweifachen Anwendung des Lemmas sehen wir, dass D sich unter P-Spiegelungen nicht
ändert. Ein Vergleich mit dem Doppelverhältnis für w = 0 zeigt daß die Gleichung
d(0, z) = ln(
(6)
1 + |z|
) = 2 artanh(|z|) = 2 artanh( D )
1 − |z|
zu zeigen ist, oder, äquivalent
q
1+|z|
1−|z|
−
q
1−|z|
1 1 + |z|
1+|z|
q
) =q
tanh( ln
1
+|
z
|
z|
2 1 − |z|
+ 11−|
1−|z|
+|z|
=|z|.
66 Lemma (Cosinusregel)
sinh | AC | P sinh | AB| P cos ∠ BAC = cosh | AC p | cosh | AB| P − cosh | BCP |
cos ∠ ABC =
tanh | AB| P
tanh | BC | P
sin ∠ BAC
sin ∠ ABC
sin ∠ ACB
=
=
sinh | BC | P
sinh | AC | P
sinh | AB| P
Beweis:
Wie oben genügt es, B = O zu betrachten. Die Längen der Strecken lassen sich durch D ausdrücken. Die Formel sind Konsequenzen von umfangreichen Umformungen aus diesen Beziehungen.
56
Elementargeometrische Figuren
9. Vorlesung am 12. Juni 2012
3.6 Kegelschnitte und Quadriken
Wir betrachten weiter eine feste Ebene.
67 Definition Seien F1 und F2 zwei Punkte, die wir Brennpunkte nennen, und 2a > | F1 F2 | ein
Radius. Die Ellipse mit diesen Brennpunkten und diesem Radius ist die Menge aller Punkte B,
für die die Summe der Abstände zu den Brennpunkten 2a ist.
Die Ellipse hat ein Inneres, das aus den Punkten besteht, für die Summe der Abstände < r, und
ein Äußeres, das aus den Punkten besteht, für die die Summe der Abstände > r.
68 Lemma Zu einem Punkt B auf der Ellipse gibt es genau eine Gerade, die wir Tangente
nennen, deren Schnitt mit der Ellipse aus dem Punkt B besteht. Sind T1 und T2 Punkte auf der
Geraden, zwischen denen B liegt so gilt ∠ F1 BT1 ≡ ∠ F2 BT2 .
Beweis:
Sei t eine Gerade, deren Schnitt mit der Ellipse aus dem Punkt B besteht. Diese Gerade verläuft
im Äußeren der Ellipse: Zunächst enthält sie Punkte im Äußeren, und zwar auf beiden Seiten
von B. Auf jeder Seite betrachten wir die Punkte A mit der Eigenschaft: Liegt A zwischen B und
C, so liegt C im Äußeren der Ellipse. Nach dem Dedekindschen Vollständigkeitsaxiom muß, falls
ein Punkt im Inneren liegt, ein zweiter Punkt auf der Ellipse liegen. Das ist aber nach Annahme
an die Gerade nicht möglich.
Wir spiegeln F2 an t und erhalten F20 . Die Strecke F1 F20 ist die kürzeste Verbindung, deren Länge
mindestens die Summe der Abstände | F1 B| + | BF2 | ist. Der Schnitt B0 der Strecke mit t liegt im
Äußeren, falls B 6= B0 . Da F2 B0 = F2 B folgt | F1 F20 | = | F1 B0 | + | B0 F2 | < | F1 B| + | BF2 |, was nicht
möglich ist, wenn B 6= B0 . Also liegt B zwischen F1 und F20 . Es folgt ∠ F1 BT1 ≡ ∠ F20 BT2 ≡ ∠ F2 BT2 .
Umgekehrt: Sei t die Winkelhalbierende der durch F1 und B sowie F2 und B definierten Geraden,
und t die Winkelhalbierenden, für die beide Brennpunkte auf der gleichen Seite liegen. Enthält
t einen weiteren Punkt B0 der Ellipse, und ist F20 wie oben, so folgt
2a = | F1 B0 | + | F2 B0 | = | F1 B0 | + | F20 B0 | > | F1 F20 | = 2a
was ein Widerspruch ist. Also existiert kein weiterer Schnittpunkt auf t.
57
Elementargeometrische Figuren
T1
F20
B
B0
F1
F2
T2
Es gibt eine einfache physikalische Anwendung: Stellt man eine Lichtquelle in einen Brennpunkt,
so wird das Licht im zweiten Brennpunkt gebündelt
69 Definition Seien F1 und F2 zwei Punkte, die wir Brennpunkte nennen, und 0 < 2a < | F1 F2 |
eine Zahl. Die Hyperbel mit diesen Brennpunkten und diesem Radius ist die Menge aller Punkte
A, für die die Differenz der Abstände zu den Brennpunkten 2a ist.
Eine Hyperbel besteht aus zwei Teilen: { A : | AF1 | − | AF2 | = r } und { A : | AF2 | − | AF1 | = r }.
Zwischen F1 und F2 liegen genau zwei Punkte der Hyperbel, die den Abstand 2a haben.
Den Mittelpunkt der Strecke F1 F2 bezeichnen wir mit O. Wir betrachten ein Dreieck F1 F2 C mit
einem rechten Winkel in C, und |CF2 | = 2a. Die Parallele durch O zu F1 C ist eine von zwei
Asymptoten. Die Asymptoten schneiden die Hyperbel nicht, aber die Hyperbeläste kommen den
Asymptoten beliebig nahe.
70 Lemma In jedem Punkt B der Hyperbel existiert genau eine Gerade, die gleiche Winkel zu
F1 B und F2 B hat, und die nur einen Punkt mit der Hyperbel gemeinsam hat.
t
F200
F1
A
F2
58
Elementargeometrische Figuren
Beweis:
Wie oben sehen wir, das eine Gerade, die mit einem Hyperbelast nur einen Punkt gemeinsam
hat, auf der Seite der Hyperbel liegt, die den näheren Brennpunkt nicht enthält.
Sei R der Radius eines Kreises um F1 , wobei R groß gewählt sei. Für jeden Punkt P im Inneren
des Kreises sei P0 der Schnitt des Strahls OP mit dem Kreis. Es gilt dann
(7)
| F1 A| − | F2 A| = R − (| AA0 | + | F2 A|).
Wir spiegeln an der Tangenten durch B auf der Ellipse und erhalten F20 . Nun gilt BF2 ≡ BF20 .
Liegt F20 zwischen F1 und B liegt so folgt die Aussage.
Wir nehmen an, F20 liege nicht zwischen F1 und B und führen diese Aussage zum Widerspruch.
Sei D der zu B und D 0 der zu F2 gehörende Punkt auf dem Kreis, und B0 der Schnitt von F2 D 0
mit t. Dann ist
| F1 B0 | − | F2 B0 | < | F1 B| − | F2 B|
da sich B0 auf t und damit der entsprechenden Seite der Hyperbel gehört. Andererseits ist falls
B 6= B0
| F2 B0 | + | B0 D 0 | = | F20 B0 | + | B0 D 0 | < | F20 B| + | BD | = | F2 B| + | BD |,
was den beiden vorangehenden Ungleichungen widerspricht. Also liegt F20 zwischen F1 und B.
Daraus ergibt sich die Aussage über die Winkel.
Damit sind die Winkel zur Tangenten kongruent, falls eine Tangente existiert.
Wir betrachten nun die entsprechende Winkelhalbierende die F1 und F2 trennt und nehmen an,
sie habe einen zweiten Schnittpunkt. Sei F20 der gespiegelte Punkt. Wir argumentieren wie oben
und erhalten, dass die Winkelhalbierende eine Tangente ist.
Eine einfache geometrische Überlegung zeigt, dass die Tangente den gegenüberliegenden Hyperbelast nicht trifft.
Nun halten wir einen Brennpunkt F1 der Ellipse und den nächsten Scheitel fest und lasse F2 auf
der Verbindungsgeraden gegen unendlich gehen.
71 Definition Sei F ein Punkt und b eine Geraden, die F nicht enthält. Die zugehörige Parabel
ist die Menge aller Punkte P , für die Distanz zu b gleich | FP| ist.
72 Lemma Zu jedem Punkt auf der Parabel gibt es eine Tangente, die die Parabel in genau
diesem Punkt berührt. Die Winkel der Strecken zu F1 bzw der Senkrechten der Geraden durch
diesen Punkt mit der Tangenten sind kongruent.
Beweis:
Der Beweis ist ähnlich zum Beweis bei der Hyperbel und bleibt dem Leser überlassen.
59
Elementargeometrische Figuren
C
F
A
B
Wir betrachten nun zwei feste Brennpunkte. Durch jeden Punkt der Ebene - mit Ausnahme der
Strecke zwischen den Brennpunkte (einschließlich der Brennpunkte) liegt auf genau eine Ellipse
mit diesen Brennpunkte. Diese Familie von Ellipsen heißt konfokal. Genau gibt es eine konfokale
Familie von Ellipsen mit diesen Brennpunkten. Diese Familien schneiden sich senkrecht.
Andere Famile senkrechter konfokaler Kurven sind Geraden durch den Ursprung und Kreise.
Zylinder, Kegel, Kegelschnitte und deren Rotationsflächen
Wir betrachten spezielle Flächen im dreidimensionalen Raum. Die einfachste Fläche ist eine
Ebene. Der Zylinder ist kaum schwieriger. Es passieŕt allerdings etwas interessantes, wenn wir
einen Zylinder und eine Ebene schneiden bzw einen Zylinder schräg abschneiden:
73 Satz
Die Schnittmenge ist eine Ellipse in der Schnittebene.
60
Elementargeometrische Figuren
Beweis:
Wir setzen zwei Kugeln vom Radius des Zylinders
so von oben bzw unten in den Zylinder, dass sie die
Ebene in genau einem Punkt berühren. Die Mittelpunkte lassen sich geometrisch und analytisch
bestimmen.
Die Schnittpunkte bezeichnen wir mit F1 und F2 .
Wir werden zeigen, dass sie die Brennpunkte sind,
oder genauer, dass die Summe der Abstände zu F1
und F2 für jeden Punkt A im Schnitt gleich sind,
und zwar gleich dem Abstand der Mittelpunkte der
Kugel.
Sei A ein Punkt im Schnitt. Eine Gerade a auf dem
Rand des Zylinders verbindet A mit dem Schnitt
der Kugeln mit dem Zylinder, und eine Gerade b1
verbindet A mit F1 und eine weitere mit F2 . Die Geraden a und b1 sind tangential zur unteren Kugel.
Eine Betrachtung in der von a und b1 definierten
Ebene zeigt dass AF1 ≡ AF10 , wobei F10 der Schnittpunkt von a und der unteren Kugel ist. Genauso
argumentieren wir mit der oberen Kugel. Daraus
folgt die Behauptung.
F20
A
F2
F1
B
F10
Diese Kugeln heißen Dandalinische Kugeln (Dandalin 1794-1847).
Der Kegel entsteht durch die Rotation einer Geraden um eine Drehachse, die die Gerade schneidet. Der Schnittpunkt ist die Kegeĺspitze.
Hier entstehen eine Reihe unterschiedlicher Figuren.
61
Elementargeometrische Figuren
Wie beim Zylinder sieht man, dass die Schnittkurve eine Ellipse ist.
F20
B
F2
F1
A
F10
Bei anderen Schnittflächen entsteht eine Hyperbel oder eine Parabel.
F1
S1
S2
F2
Zuletzt betrachten wir den Fall der Parabel
62
Elementargeometrische Figuren
F1
S
F10
und der Vollständigkeit halber auch Schnitte durch die Kegelspitze: In diesem Fall erhalten wir
einen Punkt, eine Gerade, oder zwei sich schneidente Geraden.
Alle diese Kurven (insbesondere Kreis, Ellipse, Hyperbel und Parabel) nennt man Kegelschnitte.
Wir können diese Kurven um Symmetrieachsen drehen. Bei der Ellipse erhalten wir das Ellipsoid,
bei der Hyperbel je nach Drehachse ein einschalige Hyperboloid wie oben, oder ein zweischaliges
Hyperboloid.
63
Elementargeometrische Figuren
10. Vorlesung am 19. Juni 2012
Eine analytische Beschreibung
Geraden werden durch Gleichungen der Form
ax + by = c
beschrieben. Ein Kreis vom Radius r und Mittelpunkt ( x M , y M )T genügt
r2 = ( x − x M )2 + (y − y M )2 = x2 + y2 − 2xx M − 2yy M + x2M + y2M .
Die Koordinaten der Brennpunkte sei F1 = ( f 11 , f 12 )T , genauso F2 . Dann genügt jeder Punkt der
Ellipse der Gleichung
!
!
x
x
− F2 = 2a.
− F1 + (8)
y
y
74 Lemma Eine mindestens zwei Punkte enthaltende Teilmenge S einer Ebene ist eine Ellipse,
wenn eine positiv definite 2 × 2-Matrix A, ein Vektor b und eine Zahl c existieren mit
( !
!
)
x
x
(9)
S=
: ( x, y) A
+ ( x, y)b + c = 0
y
y
Umgekehrt beschreibt diese Gleichung eine Ellipse, wenn es mehr als eine Lösung gibt.
Wir benötigen drei Ergebnisse aus der linearen Algebra. Zunächst gilt die folgende Version der
Cauchy-Schwarz-Ungleichung
!
q
p
a ( x, y)
≤ x 2 + y2 a2 + b2 .
b Ist A eine symmetrische Matrix, und sind ~x und ~y Eigenvektoren zu Eigenwerten λ und µ so
folgt
λ~y T~x = ( A~y)T~x = ~x T A~y = ~x T ( A~y) = µ~x T~y
und ~x T~y = 0 wenn λ 6= µ. Hat eine symmetrische 2 × 2 Matrix zwei gleiche Eigenwerte, so ist
sie ein Vielfaches der Identität.
Beweis:
Ausgehend von (8) suchen wir eine Beschreibung der Form (9)
Wir formen (8) um. Am Ende prüfen wir, dass wir beim Quadrieren keine zusätzlichen Lösungen
bekommen haben:
!
2
!
!
2
x
x
x
2
− F1 = (2a) − 2(2a) − F2 + − F2 .
y
y
y
64
Elementargeometrische Figuren
Wir bringen den linearen
2(2a) Term auf die linke Seite
!
2 !
2
!
x
x
x
− F2 =(2a)2 + − F2 − − F1 .
y
y
y
"
!
#T
x
=(2a)2 + 2
− ( F2 + F1 ) · ( F1 − F2 )
y
und quadrieren wieder, sortieren die Terme und teilen durch 4
!2 !
2
x x
(2a)2 ( F2 − F1 ) + ( x, y) · b + c = 0
−
y y
wobei wir in b und c alle linearen bzw konstanten Terme zusammenfassen.
Der quadratische Teil ist positiv definit falls 2a > | F2 − F1 |. Der Mittelpunkt ist 12 ( F1 + F2 ).
Die übrigen Aussagen sind leicht zu verifizieren.
In der umgekehrten Richtung müssen, ausgehend
! von (9), die Brennpunkte und a gefunden
xM
werden. Wir suchen einen (Mittel-)Punkt
so dass
yM
(x − x M , y − y M ) A
x − xM
y − yM
!
!
=
x
y
A
xM
yM
was wir durch Auflösen von
A
!
x
y
!
+ ( x, y) · b + ( x M , y M ) A
xM
yM
!
1
=− b
2
erreichen können. Wir schreiben nun die Gleichung um als Gleichung in
!
!
!
x1
xM
x
+
=
y1
yM
y
Wir dürfen also annehmen, dass b = 0 und damit 0 der Mittelpunkt ist. Die gewünschte Aussage
ändert sich bei einer Verschiebung nicht.
(
(10)
S=
x
y
!
: ( x1 , y1 ) A
x1
y1
!
)
+ c1 = 0
Dann ist c1 < 0, da es sonst höchstens eine Lösung gäbe. Sei A die positiv definite 2 × 2 Matrix
und ~f 1 ein Eigenvektor der Länge 1 zum größeren Eigenwert λ1 (wenn beide Eigenwerte gleich
sind erhalten wir einen Kreis) und ~f 2 ein Eigenvektor der Länge 1 zum zweiten Eigenwert. Wir
bezeichen die (orthogonale) Matrix, die ~f 1 in der ersten Spalte und ~f 2 in der zweiten Spalte hat
mit O. Da die Eigenvektoren
senkrecht
aufeinanderstehen folgt O T O = 1 und O ist invertierbar.
!
!
x1
x2
Wir schreiben
= O
setzen in die Gleichung ein. Wir erhalten eine quadratische
y1
y2
65
Elementargeometrische Figuren
!
x2
, wobei nun aus A eine Diagonalmatrix
y2
Gleichung der gleichen Form in
λ1 0
0 λ2
!
wird.
Wir betrachten also
λ1 x22 + λ2 y22 + c1 = 0
wobei λ1 ≥ λ2 > 0 ist.
Wir suchen F1 mit der x Koordinaten e (die Brennweite) und y Koordinaten 0.
Dann ist der Radius durch
r
c
a=
λ1
und
−c
−c
+ e2 = (r/2)2 =
λ2
λ1
und daher
r
e=
c
c
− .
λ2
λ1
Der erste Teil des Beweises zeigt nun, dass die Ellipse mit diesen Brennpunkten und diesem a
durch diese Gleichung beschrieben wird. Im letzten Schritt kehren wir die Koordinatentransformationen wieder um.
Wir betrachten ein Beispiel, bei dem wir ausgehend von der quadratischen Form die Brennpunkte
und a bestimmen.
( !
)
x
5
2
2
(11)
: 2x + 2xy + 2y + x + y − = 0
6
y
Die zugehörige Matrix ist
A=
( x, y) A
Wir wollen den Mittelpunkt
xM
yM
x
y
2 1
1 2
!
!
= 2x2 + 2xy + 2y2 .
!
bestimmen und schreiben
x
y
!
=
!
x1 + x M
. Einsetzen
y1 + y M
ergibt
0 =2( x1 + x M )2 + 2( x1 + x M )(y1 + y M ) + 2(y1 + y M )2 + x1 + y1 − 3 + x M + y M
=2x12 + 2x1 y1 + 2y21 + 2x1 (2x M + y M ) + 2y1 ( x M + 2y M ) + x1 + y1
− 3 + x M + y M + 2x2M + 2x M y M + 2y2M .
Der Mittelpunkt ist der Punkt, an dem der lineare Term verschwindet, d.h.
!
!
!
2 1
xM
1
2
=−
1 2
yM
1
66
Elementargeometrische Figuren
also x M = y M = − 61 . Der Mittelpunkt ist also
− 61
− 16
!
.
Unsere Ellipse wird nun durch
2x12 + 2x1 y1 + 2y21 +
1 7
− =0
6 6
gegeben.
Wir bestimmen die Eigenwerte mit Hilfe des charakteristischen Polynoms
!
λ − 2 −1
det
= λ2 − 4λ + 3
−1 λ − 2
mit den Nullstellen λ = 1 und
! λ = 3. Das
! sind die Eigenwerte der Matrix. Die normalisierten
1
1
Eigenvektoren sind √1
und √1
.
2
2 1
−1
Wir schreiben
!
!
!
x1
1 1
x2
1
=√
y1
y2
2 −1 1
bzw
und
1
x1 = √ ( x2 + y2 )
2
1
y1 = √ (− x2 + y2 )
2
1
x2 = √ ( x1 − y1 )
2
1
y2 = √ ( x1 + y1 ).
2
Einsetzen – entweder direkt, oder in die Matrixform – ergibt die Gleichung für die Ellipse in der
Form
x22 + 3y22 − 1 = 0.
Die Punkte (1, 0), (−1, 0), (0, √13 ) und (0, − √13 ) genügen dieser Gleichung. Wir lesen daher a = 1
– die Hälfte der längeren Achse – ab.
Die Brennpunkte können in der Form x2 = ±ρ und y2 = 0 angenommen werden. Es folgt
1
+ ρ2 = 1
3
√
und x2 = ±ρ = ± 2/3 ergibt die Koordinaten der Brennpunkte im ( x2 , y2 )-Koordinatensystem.
Wir müssen nun die Koordinaten im ( x, y)-Koordinatensystem bestimmen. Zunächst folgt für
die Koordinaten der Brennpunkte dass
!
!
x1
1
1
= ±√
.
y1
3 −1
67
Elementargeometrische Figuren
Im ( x, y)-Koordinatensysten finden wir die Koordinaten der Brennpunkte
!
!
− 61 + √13
− 16 − √13
.
− 16 − √13
− 61 + √13
Im Folgenden betrachten wir die Hyperbel.
!
!
x
x
(12)
− F1 − − F2 = 2a
y
y
und wir untersuchen die Äste ± getrennt - sie unterscheiden sich durch Vertauschen von F1 und
F2 .
!
2
!
!
2
x
x
x
− F1 = (2a)2 + 2(2a) − F2 + − F2 .
y
y
y
!
!
2 !
2
x
x
x
2
2(2a) − F2 = − (2a) + − F2 − − F1 .
y
y
y
"
!
#T
x
2
− ( F2 + F1 ) · ( F1 − F2 )
=(2a) + 2
y
und sortieren wieder nach der Ordnung der Terme
!
2
!2
T
x x
4(2a)2 −
4
(
F
−
F
)
2
1 + ( x, y ) · b + c = 0.
y y
Da 2a < | F1 − F2 | sein muss gibt es einen positiven und einen negativen Eigenwert.
Die Umkehrung reduziert sich wie oben auf die Betrachtung von
λ1 y21 + λ2 y22 + c = 0
mit c 6= 0 und λ1 > 0 > λ2 . Wir finden
r
a=
c
,
λ2
die Asymptoten sind die durch c = 0 definierte Geraden. Mit ihrer Hilfe bestimmt man die
Brennpunkte.
Wir betrachten wieder ein Beispiel:
2xy + 2x + 2y = 0
!
Die zugehörige Matrix ist A =
0 1
. Den Mittelpunkt finden wir wieder mit
1 0
!
!
xM
2
−2A
=
yM
2
68
Elementargeometrische Figuren
also x M = y M = −1. Wir schrieben x = x1 + x M und y = y1 + y M und erhalten als Gleichung
für die Hyperbel
2x1 y1 + 2 = 0.
!
1
1
und −1 mit normalisiertem
Die Eigenwerte sind 1 mit normalisiertem Eigenvektor √
2 1
!
1
Eigenvektor √1
. Wir schreiben wieder
2
−1
1
x1 = √ ( x2 + y2 ),
2
1
y1 = √ ( x1 − y1 )
2
1
x2 = √ ( x1 + y1 ),
2
1
y2 = √ ( x1 − y1 )
2
und erhalten die Form
x22 − y22 + 2 = 0.
√
Wir lesen a = 2 ab. Die Brennpunkte haben die Koordinaten x2 = 0 und y2 = ρ. Die
Asymptoten sind die Diagonalen x2 = ±y2 und damit ρ = ±2. Diese entspricht
!
√ !
2
x1
√ .
=±
y1
− 2
In den x, y Koordinaten ergibt sich
!
√
2−1
√
− 2−1
!
√
− 2−1
√
.
1− 2
Für die Parabel erhalten wir die folgende Darstellung
!
!
x
x
(13)
− F1 + bT
=c
y
y
wobei nun A den Rang 1 hat, und b nicht parallel zum Bild von A ist.
Jede quadratische Gleichung 9 definiert einen Kegelschnitt, wenn wir degenerierte Situationen
zulassen - wie A = 0, b 6= 0.
Wieder ein Beispiel:
x2 − 2xy + y2 + 2y + 1 = 0
Die zugehörige Matrix A
A=
1 −1
−1 1
!
69
Elementargeometrische Figuren
1
1
!
spannt den Kern auf. Der zweite Eigenwert ist 2 mit Eigenvektor
hat den Rang 1 und √1
2
!
1
1
√
. Wir schreiben die Gleichung um :
2
−1
√ 1
1
1
0 = ( x − y)2 + y + 1 = 2( √ ( x − y))2 + 2( √ ( x + y) − √ ( x − y) + 1.
2
2
2
Wir setzen x1 =
√1 ( x
2
− y) und y1 =
√1 ( x
2
+ y) und erhalten
2x12 + y1 − x1 + 1 = 0.
Mit x2 = x1 +
1
4
und y2 = y1 +
13
16
erhalten wir
2x22 + y2 = 0
Die Parabel ist symmetrisch zur y2 Achse. Der Scheitelpunkt hat die Koordinaten x1 = 0 und
y1 = 0. Der Brennpunkt hat die Koordinate x1 = 0 und y1 = ρ, und die Gerade genügt der
Gleichung y1 = −ρ. Der Abstand zwischen Brennpunkt und Gerade ist 2ρ.
Der Punkt x1 = 1 und y1 = 2 liegt auf der Parabel. Wir bestimmen ρ über die Gleichung
12 + ( 2 − ρ ) 2 = ( 1 + ρ ) 2
und damit ρ = 32 . Damit hat der Brennpunkt die Koordinaten x2 = 0 und y2 =
Leitgerade ist durch y2 = − 23 gegeben.
2
3,
und die
70
Elementargeometrische Figuren
11. Vorlesung am 26. Juni 2012
Auch die Rotationsflächen von Ellipsen und Hyperbeln lassen sich in der Form
x
( x y z) A y + ( x y z)b + c = 0
z
mit einer symmetrischen 3 × 3 Matrix A und einem 3 Vektor b schreiben. Allgemeiner heißen
diese Flächen Quadriken .
75 Satz Der Schnitt einer Ebene mit einer Quadrik ist ein (möglicherweise verallgemeinerter)
Kegelschnitt.
Beweis:
Wir wählen zwei linear unabhängige orthogonale Vektoren ~u und ~v der Länge 1 in der Ebene
aus sowie einen Punkt d~ in der Ebene. Wir parametrisieren die Ebene durch
d~ + x1~u + y1~v,
was wir in die quadratische Form einsetzen. Wir erhalten eine Darstellung der Form (9):
!
!
a11 a12
x1
( x1 y1 )
+ ( x1 y1 )b1 + c1 = 0
a21 a22
y1
wobei
a11 = ~u T A~u, a12 = a21 = ~v T A~u, a22 = ~v T A~v
!
~uT b + 2~uT Ad~
b1 =
~vT b + 2~vT Ad~
c1 = c + d~T Ad~
Geraden auf Flächen
Wir betrachten Quadriken, bei denen durch jeden Punkt eine auf der Quadrik verlaufende Gerade
existiert.
Das einfachste Beispiel ist eine Ebene. Auch der Zylinder hat eine offensichtliche derartige Struktur.
71
Elementargeometrische Figuren
Der Kegel ist nur marginal komplizierter.
Das einschaliges Hyperboloid ist interessanter und weniger offensichtlich.
Wir schneiden das Hyperboloid für einen gegebenen Punkt A auf dem Hyperboloid mit einer
Ebene α, die wir Tangentialebene nennen: Wir drehen das Hyperboloid, so dass A in der ( x, z)
72
Elementargeometrische Figuren
Ebene liegt. Die Ebene α enthält den Punkt A, die Gerade durch A die in Richtung der y Achse
zeigt, und die Tangente an die Hyperbel durch A in der ( x, z) Ebene, deren Rotationsfläche das
Hyperboloid ist.
Die erste Gerade ist Tangente eines Kreises auf dem Hyperboloid in der durch A verlaufenden Ebene, die parallel zur x, y) Ebene ist. Hier bedeutet parallel, dass die Ebenen sich nicht
schneiden. Hyperbel und Kreis liegen auf verschiedenen Seiten der Ebene.
Der Schnitt von Tangentialebene und Hyperboloid ist ein Kegelschnitt, der den Punkt ( x, 0, z)T
enthält, sowie jeweils zwei Komponenten für große |z|. Damit handelt es sich um zwei Geraden,
oder ein Hyperboloid. Das Hyperboloid scheidet aus, da in Nähe von ( x, 0, z) der Schnitt vier
Komponenten hat. Es kommen nur zwei sich kreuzende Geraden in Frage kommen.
Wir erhalten also ein Hyperboloid, in dem wir eine nicht durch Null verlaufende nicht senkrechte
Gerade um die z Achse rotieren lassen.
Wir wollen daraus einen Satz der ebenen Geometrie ableiten. Dazu betrachten wir drei rote und
drei blaue Geraden, die wir a1 , b1 , a2 , b2 , a3 und b3 nennen. Gleichfarbige Geraden schneiden
sich nicht. Zu jeder roten Geraden gibt es nur eine blaue Gerade, die sie nicht schneidet, und
diese ist parallel. Wir nehmen an, a1 und b1 schneiden sich A1 , b1 und a2 in A2 , a2 und b2 in
A3 , b2 und a3 in A4 , a3 und b3 in A5 sowie b3 und a1 in A6 .
Von oben sieht das Bild folgendermassen aus:
73
Elementargeometrische Figuren
A4
A5
A3
A6
A2
A1
Wir behaupten: Die Diagonalen A1 A4 , A2 A5 und A3 A6 schneiden sich in einem Punkt.
Beweis: Die Geraden durch A1 A2 und A4 A5 sind entweder parallel, oder sie schneiden sich in
einem Punkt. In beiden Fällen liegen sie in eine Ebene α1 . Genauso liegen A2 A3 und A4 A5 in
einer Ebene α2 , und A3 A4 und A6 A1 in einer Ebene α3 .
Also schneiden sich die Diagonalen paarweise - je zwei liegen in einer Ebene, und sie sind nicht
parallel.
Drei sich paarweise schneidende Geraden schneiden sich entweder in einem Punkt, oder sie liegen
in einer Ebene. Sie können aber nicht in einer Ebene liegen, da sonst alle sechs Punkte in einer
Ebene liegen müssten- das kann aber nicht sein. Also schneiden sie sich in einem Punkt.
Wir erhalten die Sätze von Brianchon für den Fall eines Kreises. Die anderen Fälle ergeben sich
durch andere (perspektivische) Projektionen.
76 Satz Die Diagonalen eines Sechsecks, das einem Kegelschnitt umbeschrieben ist, schneiden
sich in einem Punkt.
Ein Spezialfall ist der Fall zweier Geraden.
3.7 Regelmässige Vielecke und komplexe Zahlen
Ein Einschub über Algebra
In diesem Abschnitt betrachten wir Körper K, die in der Regel den Körper der rationalen Zahlen
enthalten. Der Körper
√
√
Q[ 2] = { p0 + 2q1 | p0 , p1 ∈ Q}
74
Elementargeometrische Figuren
ist offensichtlich ein zweidimensionaler Vektorraum über den rationalen Zahlen, genauso wie C
ein zweidimensionaler Vektorraum über R ist. Offensichtlich ist
√
3
Q[ 2] = { p0 + 21/3 p1 + 22/3 p2 | p0 , p1 , p2 ∈ Q}
ein dreidimensionaler Vektorraum über Q. Das Produkt von zwei Zahlen in dem Körper führt
wieder auf Elemente des Körpers.
Nicht offensichtlich ist jedoch
77 Lemma
√
Q[ 3 2] ist ein Körper.
Beweis:
Wir müssen zeigen, dass es zu p0 + 21/3 p1 + 22/3 p2 6= 0 rationale Zahlen qi gibt mit
1 =( p0 + 21/3 p1 + 22/3 p2 )(q0 + 21/3 q1 + 22/3 q2 )
=( p0 q0 + 2p1 q2 + 2p2 q1 ) + ( p0 q1 + p1 Q0 + 2p2 q2 )21/3 + ( p0 q2 + p2 q0 + p1 q1 )22/3 .
Wir ersetzen 21/3 durch x. Die Aussage ist nun äquivalent zur Polynomgleichung
(q0 + q1 x + q2 x2 )( p0 + p1 x + p2 x2 ) + ( ax + b)( x3 − 2) = 1
Die Gleichung kann mit dem Euklidschen Algorithmus gelöst werden - genau wie bei ganzen
Zahlen (siehe die Vorlesung im letzten Semester) - genau dann wenn die rechte Seite ein Vielfaches
des ggT ist. Das Polynom X 3 − 2 hat keine rationale Nullstelle (siehe letztes Semester), und damit
keinen linearen Faktor. Da der Grad 3 ist muss eine Faktorisierung einen linearen Faktor haben,
also ist x3 − 2 irreduzibel. Dann haben aber x3 − 2 und p0 + 21/3 p1 + 22/3 p2 keinen gemeinsamen
Faktor und die Gleichung kann gelöst werden.
Erinnerung: Ein Polynom über einem Körper heißt irreduzibel, wenn es nicht als echtes Produkt
zweier Faktoren geschrieben werden kann.
Diese Konstruktion funktioniert für alle irreduziblen Polynome. Die Symbole 21/3 und 22/3 können als Symbole verwendet werden, die nicht mit reellen oder komplexen Zahlen identifiziert
werden müssen.
78 Definition Seien K1 ⊂ K2 zwei Körper. Wir nennen dann K2 eine Körpererweiterung von
K1 . K2 ist auch ein Vektorraum über K1 . Ist die Dimension d endlich, so nennen wir d den Grad
[K2 : K1 ] der Körpererweiterung K1 ⊂ K2 .
√
Beispiele: [Q[ 2] : Q] = 2, [C : R] = 2.
79 Satz Seien K1 ⊂ K2 eine Körpererweiterung vom Grad d, V ein Vektorraum über K2 der
Dimension n. Dann ist V auch ein Vektorraum der Dimension dn über K1 .
Beweis:
75
Elementargeometrische Figuren
Sei e1 . . . en eine Basis des Vektorraum V über K2 , x1 . . . xd eine Basis des Vektorraums K2 über
K1 . Der Satz folgt aus der Behauptung: Dann ist ( xi e j )1≤i≤d,1≤ j≤n eine Basis von V über K1 .
Wir beweisen die Behauptung für einen komplexen Vektorraum der Dimension n über C, wobei
wir die komplexen Zahlen als Erweiterung vom Grad 2 der reellen Zahlen verstehen. Zu zeigen
ist also:
{e j , ie j }
ist eine Basis von V über den reellen Zahlen. Zunächst sind diese Vektoren linear unabhängig,
da
∑(a j + ibj )e j = 0
j
aufgrund der komplexen linearen Unabhängigkeit a j + ib j = 0 für jedes j impliziert. Da 1 und i eine Basis von C als reeller Vektorraum sind folgt a j = b j = 0 und die lineare Unabhängigkeit über
R. Es ist offensichtlich, dass diese Vektoren V über C erzeugen. Daraus folgt die Behauptung.
Der Beweis für andere Körpererweiterungen geht genauso.
80 Satz Ist K2 eine Körpererweiterung von K1 vom Grad d2 und K1 eine Körpererweiterung
von K vom Grad d1 , so ist K2 eine Körpererweiterung von K vom Grad k1 k2 .
Beweis:
K2 ist ein Vektorraum der Dimension d2 über K1 nach Definition. Nach Satz (79) ist K2 dann ein
Vektorraum der Dimension d1 d2 , und nach Definition eine Körpererweiterung vom Grad d1 d2
über K.
Wir haben im letzten Semester gesehen, dass die Koordinaten von mit Zirkel und Lineal konstruierbarer Punkte (bezüglich senkrechter Koordinaten mit Ursprung und Markierung für 1)
iterierte Wurzelausdrücke der Form
√ q
√
√
( a1 + b1 3) + ( a2 + b2 3) a3 + b3 3..
sind. Dazu gehören offensichtlich Körpererweiterungen
√ q
√
Q[ 3][ a3 + b3 3] . . .
81 Satz Die x-Koordinate eines mit Zirkel und Lineal konstruierbaren Punktes liegt in einer
Körpererweiterung K ⊂ K1 , deren Grad eine Potenz von 2 ist.
Beweis:
Jede Körpererweiterung durch eine Wurzel ist eine Erweiterung vom Grad 2. Nach (80) erhalten
wir insgesamt eine Potenz von 2.
82 Satz
Die x-Koordinate
√
3
2 ist nicht mit Zirkel und Lineal konstruierbar.
76
Elementargeometrische Figuren
Beweis:
√
√
3
2 liegt in Q[ 3 2], was den Grad 3 hat. Nach Satz (81) liegt die Zahl, wenn sie konstruierbar
√
ist, in einer Körpererweiterung K2 vom Grad 2n . Der Schnitt K1 = K2 ∩ Q[ 3 2] ist ein Körper in
√
der die Zahl 3 2 liegt. Sein Grad über Q teilt 2n und 3 nach Satz 80 ist also 1. Das kann aber
nicht sein, da x3 − 2 irreduzibel über Q ist.
Dieser Satz gibt eine negative Antwort auf das klassische Problem der Würfelverdopplung: Gegeben die Kantenlänge eines Würfels. Lässt sich die Kantenlänge eines Würfels mit doppeltem
Volumen mit Zirkel und Lineal konstruieren? Die Antwort ist “nein” nach diesem Satz.
77
Elementargeometrische Figuren
12. Vorlesung am 3. Juli 2012
Nach dem Fundamentalsatz der Algebra hat das Polynom (zn − 1)/(z − 1) eine komplexe Nullstelle, die wir ζ n nennen. Dann ist auch ζ nk für jedes k ∈ Z eine Nullstelle des Polynoms zn − 1.
Es gilt
83 Lemma Die Zahlen (ζ nk )k=0,...,n−1 bilden bezüglich der Multiplikation eine Gruppe mit n
Elementen, die isomorph zum Restklassenring (Z/nZ, +) ist.
Beweis:
Die Verknüpfung ist
j
i+ j
ζ ni ζ n = ζ n
Sie ist offensichtlich kommutativ und assoziativ mit neutralem Element 1. Das Inverse zu ζ ni ist
ζ nn−i .
Die Zahlen ζ nk werden auch n-te Einheitswurzeln genannt.
Wir identifizieren eine Ebene mit den komplexen Zahlen. Nach Wahl eines Koordinatensystems
definiert die Addition einer komplexen Zahl eine Translation der Ebene, und umgekehrt gehört
zur jeder Translation die Addition einer komplexen Zahl. Der Komposition der Translation entspricht die Addition der komplexen Zahlen.
Der Betrag der komplexen Zahl ist die Abstand des Punktes zur Null.
Bei der Multiplikation zweier komplexer Zahlen werden die Beträge multipliziert und die (orientierten) Winkel addiert. Die Multiplikation mit einer komplexen Zahl vom Betrag 1 definiert
eine Kongruenzabbildung. Diese Zahlen bilden eine Gruppe bezüglich der Multiplikation, was
der Komposition der Kongruenzabbildungen entspricht. Man sieht leicht, dass der Multiplikation
mit einer komplexen Zahl vom Betrag 1 eine Drehung entspricht.
Die n ten Wurzeln der 1 definieren also eine Untergruppe der Drehungen, die isomorph zu Z/nZ
ist.
3.8 Vielecke
Wir stellen zunächst fest
84 Satz
Die Winkelsumme im n Eck ist gleich der Summe von 2(n − 2) rechten Winkeln.
Beweis:
Durch Einziehen von n − 3 Diagonalen erhalten wir eine Zerlegung in n − 2 Dreiecke.
85 Definition Wir nennen ein n Eck regelmäßig, wenn alle Kanten und alle Winkel kongruent
sind.
86 Satz
Die Ecken eine regelmäßigen n Ecks liegen auf einem Kreis.
78
Elementargeometrische Figuren
Beweis:
Die Aussage gilt für jedes 3 Eck.
87 Korollar Zwei regelmäßige n Ecke sind genau dann kongruent, wenn die Kantenlängen
kongruent sind.
88 Satz Sei n ≥ 3. Es gibt genau ein regelmäßiges n Eck mit Ecken auf dem Einheitskreis,
für das 1 eine Ecke ist. Die Ecken sind die n-ten Einheitswurzeln ζ nk , k = 0, . . . , n − 1 wie in
Lemma 83.
Zur Konstruktion eines n-Ecks genügt es, den cos(2π/n) anzugeben. Das ist der Realteil einer
komplexen Zahl, deren n-te Potenz 1 ist, da die komplexe Multiplikation die Winkel addiert und
die Beträge erhält.
• Das regelmäßige 3-Eck. Wir suchen eine nicht reelle Zahl z mit z3 − 1 = 0. Eine Nullstelle
ist z = 1 und z3 − 1 = (z − 1)(z2 + z + 1) und
r
√
1
1
3
3
z=− ± − = ±
i.
2
4
2
2
• Das regelmäßige 4-Eck. z4 − 1 = 0. Wir wählen z = i.
• Das regelmäßige 5-Eck. Wir betrachten Nullstellen zu
0 = z5 − 1 = (z − 1)(z4 + z3 + z2 + z + 1).
Für den zweiten Faktor gilt
4
3
2
z +z +z +z+1 =
z+z
−1
2
+ z+z
−1
− 1 z2 .
Mit der Benennung w := z + z−1 betrachten wir also die Gleichung
w2 + w − 1 = 0.
Die Lösungen sind
√
5
1
.
w=− ±
2
2
Rückumformung ergibt z2 − wz + 1 = 0 mit Lösungen
√
w
w2 − 4
z= ±
.
2
2
Daraus folgt
cos(
2π
1 1√
)=− +
5.
5
4 4
79
Elementargeometrische Figuren
• Das regelmäßige 6-Eck erhalten wir durch Winkelhalbierung beim Dreieck.
• Beim regelmäßigen 7-Eck werden wir auf das Polynom
z6 + z5 + z4 + z3 + z2 + z + 1 = 0
geführt. Wir teilen durch z3 und schreiben mit w = z + z−1 (unter der Annahme z 6= 1)
0 = z3 + z2 + z + 1 + z−1 + z−2 + z−3 = w3 + w2 − 2w − 1
Kennt man w, so erhält man z durch Auflösen von
z2 − wz + 1 = 0.
Man kann nun nachweisen, dass w3 + w2 − 2w − 1 irreduzibel ist z.B. über die Lösungsformeln. Also ist das 7-Eck nicht konstruierbar.
• Das regelmäßige 8-Eck erhalten wir durch Winkelhalbierung durch das Viereck.
• Das regelmäßige 9-Eck führt auf
z9 − 1 = (z − 1)(1 + z + z2 )(1 + z3 + z6 )
Es gibt die Nullstellen
z=1
1
z = − ±i
2
sowie die Nullstellen von
r
3
.
4
( z3 +
1
1√
+i
3)
2
2
( z3 +
1
1√
−i
3).
2
2
und
√
Beide Polynome sind über Q[ 3] irreduzibel.
89 Satz
Der Winkel von 60 Grad kann nicht mit Zirkel und Lineal gedrittelt werden.
• Das regelmäßige 10-Eck entsteht durch Winkelhalbierung aus dem regelmäßigen 5-Eck.
• Das regelmäßige 12-Eck entsteht durch Winkelhalbierung aus dem 6-Eck.
• Das 15-Eck ist aus dem 3-Eck und dem 5-Eck konstruierbar.
• Das 16 Eck entsteht durch Winkelhalbierung aus dem 8-Eck.
80
Elementargeometrische Figuren
Allgemeiner kann man zeigen:
90 Satz
Mit Zirkel und Lineal kann ein n-Eck genau dann konstruiert werden, wenn
n = 2k p 1 . . . p m
geschreiben werden kann mit k ∈ N0 , m ∈ N0 und paarweise verschiedenen Fermat’schen
j
Primzahlen p1 . . . pm . Eine Primzahl heißt Fermat’sch wenn sie die Form 22 + 1 für ein j ∈ N0
hat.
Man vermutet, dass 3, 5, 17 und 65537 die einzigen Fermatschen Primzahlen sind.
Zusätzlich zu den oben schon betrachteten n-Ecken heißt das, dass das 11-Eck, das 13-Eck und
das 14-Eck nicht konstruierbar sind, das 17-Eck aber schon. Die nächsten konstruierbaren n-Ecke
sind die für n = 20, 24, 30, 32, 34. Für alle in dieser Aufzählung nicht genannten 18 ≤ n ≤ 33
ist das zugehörige n-Eck hingegen nicht konstruierbar.
81
Literatur
Literatur
[1] Agricola, I. ; Thomas Friedrich, I.A.: Elementare Geometrie. Vieweg + Teubner, 2005
http://books.google.de/books?id=8jp64mNuWRMC. – ISBN 9783834805768
[2] Feigl, Georg: Über die elementaren Anordnungssätze der Geometrie. In: Jahresberichte der
DMV 33 (1925), S. 2–24
[3] Hartshorne, Robin: Geometry: Euclid and beyond. New York : Springer-Verlag, 2000
(Undergraduate Texts in Mathematics). – xii+526 S. – ISBN 0–387–98650–2
[4] Hilbert, David: Teubner-Archiv zur Mathematik. Supplement [Teubner Archive on Mathematics. Supplement]. Bd. 6: Grundlagen der Geometrie. Fourteenth. Stuttgart : B. G.
Teubner Verlagsgesellschaft mbH, 1999. – xxiv+408 S. – ISBN 3–519–00237–X. – With
supplementary material by Paul Bernays, With contributions by Michael Toepell, Hubert
Kiechle, Alexander Kreuzer and Heinrich Wefelscheid, Edited and with appendices by Toepell
[5] Hilbert, David ; Cohn-Vossen, Stefan: Anschauliche Geometrie. Darmstadt : Wissenschaftliche Buchgesellschaft, 1973. – viii+310+48 S. – Mit einem Anhang: “Einfachste
Grundbegriffe der Topologie” von Paul Alexandroff, Reprint der 1932 Ausgabe
[6] Moore, Eliakim H.: On the projective axioms of geometry. In: Trans. Amer. Math. Soc. 3
(1902), Nr. 1, 142–158. http://dx.doi.org/10.2307/1986321. – DOI 10.2307/1986321. –
ISSN 0002–9947
[7] Schupp, Hans: Figuren und Abbildungen. Franzbecker, 1998
[8] Struve, Horst: Grundlagen einer Geometriedidaktik. Spektrum, 1995
82