Algebraische Strukturen
Werbung

1.5
Peter Hellekalek
Algebraische Strukturen
Ent
w
6. Mai 2005
urf
Skriptum
urf
Ent
w
1.5
1
1.5
Inhaltsverzeichnis
Konstruktion mit Zirkel und Lineal . . . . . . . . . . . . . . . . . . . . . . .
5
1.1 Algebraische Charakterisierung der Konstruierbarkeit . . . . . . .
5
1.2 Würfelverdopplung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.3 Winkeldreiteilung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.4 Regelmäßige n-Ecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Gruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
urf
2
2.1 Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.2 Normalteiler und Faktorgruppen . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.3 Homomorphismen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3
Ringe, Schiefkörper und Körper . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.1 Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.2 Idealtheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
3.3 Polynomringe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Ent
w
3.4 Endliche Körper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
urf
Ent
w
1.5
1.5
1 Konstruktion mit Zirkel und Lineal
Inhalt
Den modernen, sehr abstrakten Konzepten der Algebra liegen anschauliche
Probleme zu Grunde. Wir behandeln in diesem Kapitel Probleme der Geometrie, die auf die Antike zurück gehen und zu den berühmtesten Problemen
der Mathematik gehören: Die Aufgabe der Würfelverdoppelung (delisches
Problem) und die Aufgabe der Winkeldreiteilung.
urf
Ziel
Wir lösen diese Jahrtausende alten Probleme mit Hilfe der modernen Algebra.
Stichwörter
Die Stichwörter zu diesem Kapitel lauten
• Konstruktionen mit Zirkel und Lineal
• Würfelverdopplung (delisches Problem)
• Winkeldreiteilung
Literatur
Ent
w
J. Cigler. Körper, Ringe, Gleichungen. Spektrum Akademischer Verlag, Heidelberg, 1995.
1.1 Algebraische Charakterisierung der
Konstruierbarkeit
Die Konstruierbarkeit mit Zirkel und Lineal ist ein sehr altes Problem. Eine
erste Motivation soll die folgende Geschichte geben.
In der Zeit 430 v. Chr. brach in Athen die Pest aus. In ihrer Not befragten die
Athener das Orakel von Delos. Dieses prophezeite ihnen, dass der Gott Apollo
Athen von der Pest befreien würde, wenn die Stadtväter den würfelförmige
Altar im Apollotempel auf Delos durch einen mit doppelt so großen Volumen
ersetzten. Die Athener sind leider an dieser Aufgabe gescheitert, mit den
entsprechenden furchtbaren Konsequenzen für ihre Stadt.
6
1 Konstruktion mit Zirkel und Lineal
1.5
Warum gelang ihnen die Lösung dieser scheinbar einfachen Aufgabe nicht?
Wir untersuchen dazu den mathematischen Hintergrund.
Damals wurden die Konstruktionen mit Hilfe von Zirkel und Lineal durchgeführt. Die Steinmetze hatten ja keine andere Möglichkeit, ihre Konstruktionszeichnungen zu erstellen und die gewünschten Seitenlängen zu berechnen.
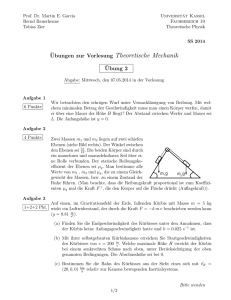
Hätte der Gott Apollo durch das Orakel gefordert, eine quadratische Altarplatte durch eine Platte mit doppelter Fläche zu ersetzen, dann wäre die
Konstruktion leicht möglich gewesen, wie in Abbildung
√ 1.1 zu sehen ist. Die
Seitenlänge der neuen Platte beträgt offensichtlich
2. Wie aus der Zeich√
nung hervorgeht, können wir die reelle Zahl 2 ganz leicht mit Zirkel und
Lineal konstruieren.
√
2
1
√
2
2
1
urf
PSfrag replacements
√
Abbildung 1.1. Konstruktion eines Quadrats mit doppelter Fläche
Die Aufgabe der sogenannten Würfelverdoppelung, auch delisches Problem
genannt, wie es sich durch den Spruch des Orakels stellte, führt zu der folgenden Frage. Wenn wir die Seitenlänge des ursprünglichen Altars mit 1 festlegen,
dann beträgt die Seitenlänge des doppelt so großen Altars offensichtlich
√
3
2.
Ent
w
Die Mathematiker des Altertums hatten also das folgende Problem vor sich.
√
Frage 1.1 Wie konstruieren wir mit Zirkel und Lineal die Zahl 3 2?
Um ein Gefühl für derartige Fragen zu entwickeln, studieren wir als Beispiel
die folgende Aufgabe.
Frage 1.2 Können wir eine Strecke durch sukzessives Halbieren mit Zirkel
und Lineal in drei gleichgroße Teile teilen ?
Wir stellen fest, dass die Frage darauf hinausläuft, ob wir die Zahl
fortgesetzte Halbierung erhalten können.
1
3
durch
Wir können durch fortgesetzte Halbierung folgende Zahlen konstruieren:
1 1 1
1
, , , ··· , n,
2 4 8
2
∀n ∈ N
1.1 Algebraische Charakterisierung der Konstruierbarkeit
7
1.5
Damit können wir aber offensichtlich alle Zahlen der Form
a
,
0 ≤ a ≤ 2n , a ∈ Z
2n
konstruieren, indem wir zum Beispiel die Teilstrecke 1/2n mehrmals mit dem
Zirkel abschlagen. Das Problem der Darstellung von 1/3 kann aber so nicht
gelöst werden, denn dazu müsste es offensichtlich ein a und ein n geben mit
a
1
= n
3
2
⇒
⇒
2n = 3a
3 | 2n ,
was aber nicht möglich ist und auf einen Widerspruch führt (Stichwort Primfaktorzerlegung).
urf
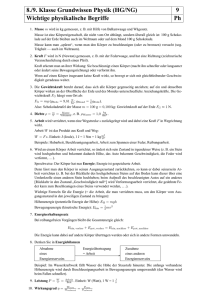
Bemerkung 1.3 Wenn wir mit Zirkel und Lineal ein √wenig herumprobieren, so erkennen wir sehr rasch,
√ dass nicht nur die Zahl 2 konstruierbar ist,
sondern jede Quadratwurzel n mit n ∈ N. Dies ist leicht einzusehen, indem
wir die Quadratwurzelschnecke betrachten: Man zeichnet zuerst das rechtwinkelige Dreieck
mit den Katheten der Länge 1. Die Hypothenuse hat dann die
√
Länge 2. Diese Hypothenuse betrachtet man nun als linke Kathete, setzt
rechts die Kathete
√ der Länge 1 an und erhält so als neue Hypothenuse eine
man dieses Verfahren fortsetzt, erhlält man alle
Seite der Länge 3. Indem √
genannten Quadratwurzeln n.
Bemerkung 1.4 Es ist nun an der Zeit festzulegen, was man genau unter
einer Konstruktion mit Zirkel und Lineal versteht.
Definition 1.5 (Konstruktionsregeln)
Für die Konstruktion mit Zirkel und Lineal von Punkten der Ebene und von
komplexen Zahlen gelten die folgenden Grundregeln (Axiome):
Ent
w
1. Die Punkte O = (0, 0) und E = (1, 0) sind mit Zirkel und Lineal konstruierbar.
2. Sind die beiden Punkte A und B konstruierbar, so kann die Verbindungsgerade mit dem Lineal gezeichnet werden.
3. Sind die Punkte A, B und C konstruierbar, dann kann der Kreis mit
Mittelpunkt C und Radius |AB| (damit ist die Länge der Strecke von A
nach B gemeint) mit dem Zirkel gezeichnet werden.
4. Alle Schnittpunkte von Geraden oder Kreisen, die mit Zirkel und Lineal
gezeichnet werden können, sind konstruierbar.
Definition 1.6 (Konstruierbarkeit von Punkten)
Ein Punkt P = (x, y) der Ebene heißt konstruierbar, wenn er in endlich vielen Schritten als Schnittpunkt von Geraden oder Kreisen dargestellt werden
kann, die mit Zirkel und Lineal gezeichnet werden können.
8
1 Konstruktion mit Zirkel und Lineal
1.5
Definition 1.7 (Konstruierbarkeit von reellen Zahlen)
Wir nennen eine reelle Zahl x mit Zirkel und Lineal konstruierbar, wenn der
Punkt (x, 0) der Ebene mit Zirkel und Lineal konstruierbar ist.
Wir bezeichnen mit Ω(R) die Menge der konstruierbaren reellen Zahlen.
Frage 1.8 Welche reellen
√ Zahlen liegen in der Menge Ω(R)? Insbesondere
möchten wir wissen, ob 3 2 in Ω(R) liegt.
Wir geben nun einige einfache Konstruktionen an. Sie vermitteln grundlegende Einsichten in den Zusammenhang zwischen konstruierbaren Punkten
und ihren Koordinaten, den konstruierbaren Zahlen.
Konstruktion I
Es gilt
Z ⊂ Ω(R).
urf
Wir zeichnen dazu mit dem Lineal die Gerade durch O und E. Dann schlagen
wir mit dem Zirkel und Lineal sukzessive nach rechts und links die (EinheitsPSfrag replacements
)Strecke OE ab. Es sind also alle Punkte (n, 0) mit n ∈ Z konstruierbar
(Abbildung 1.2).
(−2, 0) (−1, 0)
O
E
(2, 0) (3, 0)
Abbildung 1.2. Konstruktion der Punkte (n, 0)
Konstruktion II
Es gilt
x, y ∈ Ω(R) ⇒ x ± y ∈ Ω(R).
Ent
w
Sind die Punkte (x, 0) und (y, 0) bereits konstruiert, so können wir daraus
die Punkte
(x, ±y)
konstruieren. Dazu konstruieren wir die Normale auf die Gerade OE durch
den Punkt (x, 0), indem wir die Schnittpunkte der Kreise mit Radius 2 um
(x − 1, 0) und (x + 1, 0) verbinden.
Wir schlagen dann mit dem Zirkel auf die Normalen durch (x, 0) die Länge
|y| ab und erhalten (x, y) und (x, −y).
Konstruktion III
Ist der Punkt (x, y) konstruierbar, so sind auch die Punkte (x, 0) und (y, 0)
konstruierbar:
Wenn y = 0 gilt, dann ist die Behauptung trivialerweise richtig.
Wenn y =
6 0 ist, dann zeichnen wir die Normale auf die x-Achse durch (x, y)
1.1 Algebraische Charakterisierung der Konstruierbarkeit
9
1. r > |y|
1.5
und erhalten (x, 0).
Um die Normale zu konstruieren, nehmen wir einen Radius r, der die Bedingungen
2. r ist der Abstand zweier konstruierbarer Punkte
erfüllt, in den Zirkel, schneiden den Kreis um (x, y) mit Radius r mit der xAchse. Es entstehen so die Schnittpunkte A und B. Dann zeichnen wir noch
die Kreise mit Radius r um diese beiden Schnittpunkte A und B. Die beiden
Kreise schneiden sich in den Punkten S1 und S2 . Die Verbindungsgerade der
Punkte S1 und S2 ist die gesuchte Normale auf die x-Achse (Abbildung 1.3).
Analog konstruieren wir (0, y) und daraus (y, 0).
y
g
PSfrag replacements
c2
urf
c1
c3
(x, y) = S1
A
(x, 0)
B
x
S2
Ent
w
Abbildung 1.3. Konstruktion von (x, 0)
Bemerkung 1.9 Konstruktion II + III ergeben:
(x, y) ist genau dann konstruierbar, wenn (x, 0) und (y, 0) konstruierbar
sind. Dies ist weiters äquivalent zur Aussage, dass die Punkte (x, 0) und
(0, y) konstruierbar sind (wie man leicht einsieht).
Bemerkung 1.10 Die Eigenschaft
x, y ∈ Ω(R) ⇒ x − y ∈ Ω(R)
impliziert, dass Ω(R) eine Untergruppe der additiven Gruppe (R, +) ist. Nun
ist aber (R, +, ·) ein Körper. Können wir sogar zeigen, dass die Menge Ω(R)
zusammen mit diesen beiden Verknüpfungen einen Körper bildet?
10
1 Konstruktion mit Zirkel und Lineal
1.5
Definition 1.11 (Teilkörper und Erweiterungskörper)
Sei (L, +, ·) ein beliebiger Körper. Unter einem Teilkörper (oder Unterkörper)
K des Körpers L verstehen wir eine nichtleere Teilmenge K ⊆ L, für die
(K, +, ·) ein Körper ist. L heißt dann ein Erweiterungskörper von K.
Schreibweise: K ≤ L. Im Fall K ⊂ L, K 6= L, schreiben wir K < L.
Bemerkung 1.12 In Frage 1.10 haben wir wissen wollen, ob Ω(R) ein
Teilkörper von (R, +, ·) ist. Bevor wir diese Frage klären, beweisen wir zur
Übung das folgende Lemma. Es wird uns dabei nützlich sein, wenn es um die
Koordinaten der Schnittpunkte zweier konstruierbarer Kreise geht. Wir setzen an dieser Stelle voraus, dass die Körpereigenschaft von (C, +, ·) bekannt
ist.
√
Lemma 1.13 Sei K < C und sei c ∈ K mit c 6∈ K. Wir definieren
√
√
K( c) = a + b c : a, b ∈ K .
Dann gilt
K < K
√ c ≤ C.
urf
Definition 1.14√(Quadratischer Erweiterungskörper, Adjunktion)
Der Körper (K( c), +, ·) heißt ein quadratischer Erweiterungskörper
von
√
K. Man sagt: er ist durch Adjunktion des Elements c entstanden.
Beweis.
√ Was ist zu zeigen?
K ( c) ist eine Teilmenge von C. Da für C Addition und Multiplikation
assoziativ und kommutativ√sind und auch das Distributivgesetz gilt, sind
diese Eigenschaften für (K( c), +, ·) automatisch erfüllt.
Ent
w
Was ist noch offen?
√
Für beliebige α, β ∈ K ( c) ist zu zeigen
√ α+β ∈K
c
√ −β ∈K
c
√ c
α·β ∈K
√ −1
β ∈K
c
falls β 6= 0
⇒ α − β = (a1 − a2 ) + (b1 − b2 )
√
c
∈ K
(1.2)
(1.3)
(1.4)
Wir können (1.1) und (1.2) zur äquivalenten Aussage
√ α−β ∈ K
c
zusammenfassen und zeigen nun (1.5).
√
α = a 1 + b1 c
a 1 , b1 ∈ K
√
a 2 , b2 ∈ K
β = a 2 + b2 c
(1.1)
(1.5)
√ c
1.1 Algebraische Charakterisierung der Konstruierbarkeit
11
Wir zeigen (1.3).
∈K
√ c
1.5
√
α · β = (a1 a2 + b1 b2 c) + (a1 b2 + a2 b1 ) c
|
{z
} |
{z
}
∈K
∈K
Wir zeigen (1.4).
√
√
Sei p = a + b c mit p 6= 0. Daraus folgt a − b c 6= 0, denn
Fall 1
Fall 2
Fall 3
⇒
⇒
⇒
⇒
(a 6= 0 und b = 0) oder (a = 0 und b 6= 0) oder
{z
}
{z
}
|
|
Fall 1
Fall 2
(a 6= 0 und b 6= 0)
|
{z
}
Fall 3
√
a − b c = a 6= 0
√
√
√
p = b c 6= 0 ⇒ −b c = a − b c 6= 0
√
√
wäre a − b c = 0, dann wäre c = a b−1 ∈ K Wid.!
urf
p 6= 0
√
Da K ( c) eine Teilmenge von C ist, folgt
√ p . a−b c
= a 2 − b2 c
|{z} | {z }
6=0
Weiters folgt
p−1 =
6= 0.
6=0
√
1
a
a−b c
−b √
√ = 2
= 2
c
+ 2
2
2
a −b c
a − b c a − b2 c
a+b c
| {z } | {z }
√
∈K
∈K
Ent
w
und daher gilt p−1 ∈ K( c).
Beispiel 1.15 Wir setzen K = R und c = −1. Dann gilt mit i =
√ √ c = R −1 = {a + b i : a, b ∈ R} = C.
K
√
2
−1:
Bemerkung 1.16 C ist ein quadratischer Erweiterungskörper von R.
Beispiel 1.17
√ √ n
o
√ √ √
Q
2
3 =
a+b 2 + c+d 2
3 : a, b, c, d ∈ Q
n
o
√
√
√
= a + b 2 + c 3 + d 6 : a, b, c, d ∈ Q
12
1 Konstruktion mit Zirkel und Lineal
1.5
Beispiel 1.18
o
√ √ n
√ √
√ 4
4
Q
2
2 =
2 : a, b, c, d ∈ Q
a+b 2 + c+d 2
o
n
√
√
√
4
4
= a + b 2 + c 2 + d 8 : a, b, c, d ∈ Q
Und nun, nach dieser Vorübung mit Teilkörpern, der entscheidende Satz!
Satz 1.19 Es gilt
Q ≤ Ω(R) ≤ R.
Die konstruierbaren reellen Zahlen sind also ein Teilkörper von (R, +, ·) und
enthalten wiederum Q als einen Teilkörper.
urf
Beweis. Wir wissen schon, dass Z in der Menge Ω(R) enthalten ist, siehe
Konstruktion I. Wenn wir zeigen können, dass Ω(R) ein Körper ist, dann ist
Q ≤ Ω(R) trivial, da
p ∈ Z ⇒ p ∈ Ω(R)
p
q ∈ N ⇒ q ∈ Ω(R)
⇒ p · q −1 = ∈ Ω(R)
q
Ω(R) Körper
Nach den Überlegungen im Beweis von Lemma 1.13 reicht es aus wenn wir
zeigen, dass aus der Konstruierbarkeit von a > 0 und b > 0 folgt
a+b
−b
sind konstruierbar.
a·b
b−1
Ent
w
a + b ∈ Ω(R) : Von (a, 0) tragen wir die Strecke b auf der x-Achse auf, dies
ergibt den Punkt (a + b, 0).
−b ∈ Ω(R) : dies ist trivial.
Die Zahl a · b ist konstruierbar:
Dazu verwenden wir den Strahlensatz. Es gilt
a : (a · b)
=
1 : b
Wir zeichnen zuerst die Verbindungsgerade der beiden Punkte (a, 0) und
(0, 1). Dann zeichnen wir dazu die Parallele durch den Punkt (0, b). Deren
Schnittpunkt mit der x-Achse ist nach dem Strahlensatz der Punkt (a · b, 0)
(Abbildung 1.4).
Offen ist noch die Konstruierbarkeit der Parallelen zu einer gegebenen Geraden durch einen gegebenen Punkt.
1.1 Algebraische Charakterisierung der Konstruierbarkeit
13
α
(0, 1)
(a, 0)
O
1.5
(0, b)
PSfrag replacements
(a · b, 0)
Abbildung 1.4. Konstruktion von a · b
(0, 1)
PSfrag replacements
(0,
1
)
b
O
urf
Die Zahl b−1 ist konstruierbar: Wir verwenden wieder den Strahlensatz, nach
ihm gilt
1
: 1
1 : b
=
b
Wir zeichnen die Verbindungsgerade der Punkte (0, 1) und (b, 0), dann die
Parallele durch (1, 0) (Abbildung 1.5). Wir erhalten so den Punkt (0, 1b ).
(1, 0)
(b, 0)
Abbildung 1.5. Konstruktion von b−1
Ent
w
Konstruktion der Parallelen:
Sei die Gerade g durch die zwei Punkte A und B gegeben. Sei P ∈
/ g. Dann
können wir mit Zirkel und Lineal die durch P gehende Parallele zu g konstruieren. Wir konstruieren dazu zuerst die Normale n zu g durch P (siehe dazu
Konstruktion II bzw. III), dann die Normale h auf n durch P (Abbildung
1.6).
Damit ist Satz 1.19 bewiesen.
2
Definition 1.20 (Konstruierbarkeit von komplexen Zahlen)
Wir nennen eine komplexe Zahl z = x + iy, x, y ∈ R, konstruierbar, wenn
der Punkt (x, y) konstruierbar ist.
Wir bezeichnen die Menge der konstruierbaren komplexen Zahlen mit Ω.
1 Konstruktion mit Zirkel und Lineal
PSfrag replacements
P
1.5
14
h
A
n
B
g
Abbildung 1.6. Konstruktion der Parallelen
Bemerkung 1.21 Wir wissen bereits, dass z = x + iy, x, y ∈ R, genau
dann konstruierbar ist, wenn x = Re z und y = Im z konstruierbar sind. Es
gilt also die Beziehung
Ω = {z ∈ C : z = x + iy mit x, y ∈ Ω(R)}
urf
In Teilkapitel 1.3 werden wir zeigen, dass Ω ein Körper ist.
Der folgende Satz gibt eine wichtige Eigenschaft des Körpers Ω(R) an.
Satz 1.22
∀ a ∈ Ω(R), a > 0 :
√
a ∈ Ω(R)
Beweis. Die Zahlen a und 1 sind konstruierbar. Damit sind auch die Zahlen
a + 1, a − 1, (a + 1)/2, (a − 1)/2 konstruierbare reelle Zahlen.
o
n
2
Wenn wir den konstruierbaren Kreis x2 + y 2 = ((a + 1)/2) und die konstruierbare Gerade {x = (a − 1)/2} schneiden, so sind die beiden Schnittpunkte konstruierbare Punkte. Ihre Koordinaten liegen also in Ω(R).
Ent
w
Die definierenden Gleichungen für die Schnittpunkte sind
2
a+1
2
2
,
x +y =
2
a−1
x =
.
2
√
√
Daraus folgt, dass y = ± a sein muss (Abbildung 1.7). Somit ist a eine
konstruierbare reelle Zahl.
2
Korollar 1.23 Sei K ≤ Ω(R) und sei c ∈ K, c > 0.
Dann gilt
√
K( c) ≤ Ω(R).
Denn: c ∈ K ⇒ c ∈ Ω(R) ⇒
√
√
c ∈ Ω(R) ⇒ K( c) ≤ Ω(R).
√
a
0
a−1
2
a+1
2
PSfrag replacements
a
a+1
√
a
urf
√
− a
15
1.5
1.1 Algebraische Charakterisierung der Konstruierbarkeit
Abbildung 1.7. Konstruktion von
Frage 1.24 Sei K ein Teilkörper von R mit der Eigenschaft K ≤ Ω(R).
Jeder Punkt P = (x, y) mit x, y ∈ K ist also konstruierbar.
Sei nun Q der Schnittpunkt von Geraden oder Kreisen, die durch die Punkte
von K definiert sind (siehe Definition 1.5). Unsere Frage lautet: In welchem
Körper liegen die Koordinaten des Schnittpunktes Q?
Ent
w
Lemma 1.25 Sei K ein Teilkörper von Ω(R) und seien A = (a1 , b1 ) und
B = (a2 , b2 ), A 6= B, zwei konstruierbare Punkte mit Koordinaten aus K.
Dann gilt
1. Die Gerade durch A und B hat die Form
rx + sy + t = 0
mit r, s, t ∈ K
(1.6)
2. Der Kreis mit Mittelpunkt A durch den Punkt B hat die Form
x2 + y 2 + ux + vy + w = 0
mit u, v, w ∈ K
(1.7)
Bemerkung 1.26 Dieses Resultat besagt also, dass die Koeffizienten r, s, t
und u, v, w der Gleichungen 1.6 und 1.7 wieder im Körper K liegen.
Beweis. Zu 1.
Die Gleichung der Geraden lautet
1 Konstruktion mit Zirkel und Lineal
⇒
y − b1
b2 − b 1
=
.
x − a1
a2 − a 1
(a2 − a1 ) y + (b1 − b2 ) x + (b1 (a1 − a2 ) + a1 (b2 − b1 )) = 0
| {z }
{z
}
| {z }
|
r
1.5
16
s
t
Zu 2.
Die Gleichung des Kreises mit Mittelpunkt A durch B lautet
2
⇒
(x − a1 ) + (y − b1 )
2
2
= (a2 − a1 ) + (b2 − b1 )
2
x2 + y 2 + (−2a1 ) x + (−2b1 ) y + a21 + b21 + . . . = 0
| {z }
| {z }
|
{z
}
u
v
w
Da (K, +, ·) ein Körper ist, liegen u, v, w wieder in K.
2
Wenn wir aus konstruierbaren Punkten Geraden oder Kreise bilden, verlassen
wir also den jeweiligen Zahlenkörper K nicht. Es stellt sich die Frage, liegen
auch die Koordinaten der Schnittpunkte solcher Geraden und Kreise in K ?
Dann gilt:
urf
Lemma 1.27 Sei C = (a3 , b3 ) der Schnittpunkt von Geraden oder Kreisen,
wie sie in Lemma 1.25 konstruiert wurden.
1. Wenn C der Schnittpunkt zweier solcher Geraden ist, dann liegen die
Koordinaten a3 und b3 von C wieder in K.
2. Wenn C der Schnittpunkt einer solchen Geraden und eines solchen Kreises ist, dann liegen
√ die Koordinaten a3 und b3 in einer quadratischen
Erweiterung K( c) von K mit einer reellen Zahl c > 0.
3. Der Schnitt von zwei Kreisen entspricht dem Fall 2.
Ent
w
Beweis. Zu Fall 1.
Zwei Geradengleichungen müssen erfüllt sein:
r1 x + s 1 y + t 1 = 0
r2 x + s 2 y + t 2 = 0
mit ri , si , ti ∈ K
Es ist klar, dass die Lösung (a3 , b3 ) die Eigenschaft a3 , b3 ∈ K besitzt.
Zu Fall 2.
Der Schnitt eines Kreises mit einer Geraden ist durch die Gleichungen
x2 + y 2 + ux + vy + w = 0
rx + sy + t = 0
definiert.
Falls r 6= 0 gilt
1.1 Algebraische Charakterisierung der Konstruierbarkeit
17
⇒
⇒
1.5
s
t
x = − y −
r
r
us
t2
s2
2st
ut
⇒
1 + 2 y2 + −
+v + 2 y +w + 2 −
= 0
r
r
r
r
r
y 2 + αy + β = 0
mit α, β ∈ K
r
2
α
α
y1, 2 = − ±
− β existiert nur, falls
2
4
α2
c :=
− β ≥ 0 ist.
4
Offensichtlich liegen für c = 0 die Koordinaten a3 und b3 des Schnittpunktes
C = (a3 , b3 ) wieder in K. Für c > 0 haben die Koordinaten des Schnittpunktes die Gestalt
√
mit a, b ∈ K.
a+b c
Also liegen die Koordinaten
a3 und b3 des Schnittpunktes in der quadrati√
schen Erweiterung K ( c) des Körpers K, siehe Lemma 1.13 und Definition
1.14.
urf
Zu Fall 3.
Der Schnitt zweier Kreise wird durch die Gleichungen
x2 + y 2 + u 1 x + v 1 y + w 1 = 0
x2 + y 2 + u 2 x + v 2 y + w 2 = 0
beschrieben. Ähnlich wie im Fall 2 liegen
die Koordinaten a3 , b3 eines
√
Schnittpunktes wieder in K oder in K ( c), mit c > 0 reell.
2
Wir geben nun die Antwort auf die Frage 1.24.
Ent
w
Satz 1.28 Ein Punkt (a, b) der Ebene ist genau dann mit Zirkel und Lineal
konstruierbar, wenn es eine endliche Folge von Körpern (Kj ) gibt mit den
Eigenschaften
1. Q = K0 ≤ K1 ≤ . . . ≤ KN ≤ R
√ √
2. Kj+1 = Kj
cj mit cj > 0, cj ∈ Kj , cj ∈
/ Kj
3. a, b ∈ KN
Beweis. Wir wissen bereits
• (a, b) ist konstruierbar
⇔
a, b ∈ Ω(R)
• Q = K0 ≤ Ω(R), siehe Satz 1.19
• falls Kj ≤ Ω(R) und cj ∈ Kj , cj > 0
√
√ cj ≤ Ω(R)
⇒ cj ∈ Ω(R), siehe Satz 1.22; damit gilt Kj
18
1 Konstruktion mit Zirkel und Lineal
1.5
Sei (a, b) konstruierbar, daher a, b ∈ Ω(R). Nach Definition 1.6 heißt das,
dass (a, b) in endlich vielen Schritten als Schnittpunkt von Geraden oder
Kreisen dargestellt werden kann. Der kleinste Teilkörper von Ω(R), indem
a und b liegen können, ist K0 = Q. Nach Lemma 1.27 erhalten wir bei
jedem Konstruktionsschritt als (Zwischen-) Ergebnis Schnittpunkte, deren
Koordinaten entweder im jeweiligen Körper Kj oder in einer quadratischen
√
cj liegen, mit cj > 0. Wir benötigen höchstens endlich
Erweiterung Kj
viele derartige Schritte. Damit ist die Existenz einer derartigen Körperkette
gezeigt.
Es sei umgekehrt eine Körperkette mit den Eigenschaften 1. bis 3. gegeben.
Wir behaupten: a, b ∈ Ω(R)
Denn: Es gilt ja Q = K0 ≤ Ω(R) und daraus folgt, nach dem was wir bisher
√
c0 ≤ Ω(R). Damit können wir mit Induktion zeigen,
wissen K1 = K0
dass gilt:
Kj ≤ Ω(R), j = 0, . . . , N
2
urf
Korollar 1.29 Eine reelle Zahl a ist genau dann mit Zirkel und Lineal konstruierbar, wenn es eine endliche Folge von Körpern (Kj ) gibt mit den Eigenschaften
1. Q = K0 ≤ K1 ≤ . . . ≤ KN ≤ R
√
√ cj mit cj > 0, cj ∈ Kj , cj ∈
/ Kj
2. Kj+1 = Kj
3. a ∈ KN
Beweis. Wir wenden Satz 1.28 auf den Punkt (a, 0) an.
2
Ent
w
1.2 Würfelverdopplung
Unser Ziel ist es, eines der berühmtesten Probleme der Geometrie zu lösen,
das bereits genannte Delische Problem.
√
Satz 1.30 Die reelle Zahl 3 2 ist nicht mit Zirkel und Lineal konstruierbar.
Beweis.√ Wir führen den Beweis indirekt.
Wenn 3 2 konstruierbar wäre, dann gäbe es nach Satz 1.28 eine Kette K0 ≤
K1 ≤
√· · · ≤ KN von sukzessiven quadratischen Erweiterungen von Q = K0 ,
mit 3 2 ∈ KN .
Wir beweisen zunächst zwei√Behauptungen und leiten aus ihnen dann einen
Widerspruch zur Annahme 3 2 ∈ Ω(R) her.
1.2 Würfelverdopplung
19
√
1.5
Behauptung 1: Wenn in einem quadratischen Erweiterungskörper K( c) ein
Element α mit α3 = 2 existiert, dann gibt es bereits im Grundkörper K ein
Element β mit β 3 = 2.
Behauptung 2: In Q existiert kein Element β mit β 3 = 2.
√
Wenn wir diese Behauptungen gezeigt haben, dann folgt: Sei α := 3 2, dann
existiert also in KN ein Element α mit α3 = 2. Nach Behauptung 1.2 existiert
3
dann in KN −1 ein Element βN −1 mit βN
−1 = 2. Nun schließen wir wie vorhin
3
und erhalten so die Existenz eines βN −2 in LN −2 mit βN
−2 = 2. Mit Hilfe
dieser wiederholten Anwendung von Behauptung 1 folgt die Existenz eines
β ∈ Q mit√β 3 = 2. Dies ist aber ein Widerspruch zu Behauptung 2. Damit
kann α = 3 2 nicht konstruierbar sein.
√
Beweis von Behauptung 1. Sei α ∈ K ( c) mit α3 = 2.
√ √
α∈K
c
⇒ α = a + b c mit a, b ∈ K
Wäre b = 0, dann wäre α = a ∈ K. In diesem (trivialen) Fall ist die Behauptung 1 somit bewiesen.
urf
Sei also b 6= 0. Wir erhalten
√
√ 3
2 = a + b c = a3 + 3ab2 c + 3a2 b + b3 c c
Mittels Koeffizientenvergleich ergibt sich
2 = a3 + 3ab2 c
0 = 3a2 b + b3 c = b 3a2 + b2 c
Sonst wäre ja
√
2 − a3 − 3ab2 c
= c,
2
3
|{z}
3a b + b c
|
{z
}
∈
/K
∈K
Ent
w
dies ist aber ein Widerspruch.
Aus b 6= 0 folgt 3a2 + b2 c = 0 und damit gilt b2 c = −3a2 . Weiters schließen
wir
)
a3 + 3ab2 c = 2
⇒ a3 − 9a3 = −8a3 = (−2a)3 = 2.
b2 c = −3a2
Wenn wir β := −2a setzen, dann gilt
β 3 = 2,
β ∈ K.
Damit ist Behauptung 1 gezeigt.
Beweis von Behauptung 2.
3
Sei β = m
n ∈ Q mit β = 2 und seien m, n ∈ Nr, (m, n) = 1.
20
1 Konstruktion mit Zirkel und Lineal
Daraus folgt
1.5
m3 = 2n3
In der Primfaktorzerlegung von m3 tritt die Primzahl 2 mit dem Exponenten
3r auf, mit einem r ∈ N. In der Primfaktorzerlegung von n3 tritt 2 mit
dem Exponenten 3s mit einem s ∈ Z, s ≥ 0 auf. Wegen m3 = 2n3 tritt
die Primzahl 2 links mit Exponent 3r, rechts aber mit Exponent 1 + 3s auf.
Der Vergleich der Exponenten von 2 auf der linke und der rechten Seite der
Gleichung ergibt
3r = 1 + 3s,
dies ist aber ein Widerspruch. Daraus folgt, dass kein solches β ∈ Q existiert.
Damit ist Behauptung 2 und in der Folge auch auch Satz 1.30 gezeigt. 2
1.3 Winkeldreiteilung
urf
In diesem Teilkapitel geben wir die Antwort auf das zweite große Problem
der antiken Mathematik:
Frage 1.31 Können wir jeden Winkel mit Zirkel und Lineal in drei gleiche
Teile teilen?
Die Antwort lautet, für einige Winkel ist dies möglich. Zum Beispiel für den
Winkel α = 90◦ :
Wir können den Winkel von 60◦ konstruieren, da dies der Winkel eines gleichseitigen Dreiecks ist. 30◦ erhalten wir durch Halbierung.
Im Allgemeinen ist die Winkeldreiteilung mit Zirkel und Lineal aber nicht
möglich, wie wir nun zeigen werden. Dazu benötigen wir einige Resultate für
konstruierbare komplexe Zahlen (siehe Definition 1.20).
Ent
w
Satz 1.32 Die konstruierbaren komplexen Zahlen bilden einen Körper,
Ω ≤ C.
Beweis. Es gilt Ω 6= ∅, da die konstruierbaren reellen Zahlen in Ω enthalten
sind.
Zur Addition: Seien z1 und z2 zwei Elemente von Ω,
z1 = x1 + iy1
z2 = x2 + iy2
Dann gilt
mit xi , yi ∈ R
1.3 Winkeldreiteilung
21
⇒
⇒
1.5
z1 − z2 = (x1 − x2 ) + i (y1 − y2 )
z1 , z2 ∈ Ω ⇒ x1 , x2 , y1 , y2 konstruierbar
(Satz 1.19) x1 − x2 , y1 − y2 konstruierbar
(Bemerkung 1.21) z1 − z2 ∈ Ω
Zur Multiplikation:
Der Beweis der Aussage
z1 , z 2 ∈ Ω
⇒
z 1 . z2 ∈ Ω
erfolgt völlig analog zur Addition.
Multiplikatives Inverses:
Sei z ∈ Ω, z = x + iy 6= 0.
1
1
x − iy
x
−y
=
= 2
= 2
+ 2
i.
2
2
z
x + iy
x +y
x +y
x + y2
urf
Es sind x und y reelle konstruierbare Zahlen mit x2 + y 2 > 0, daher sind die
Zahlen
−y
x
, 2
x2 + y 2 , 2
2
x + y x + y2
1
nach Satz 1.19 konstruierbar, und daher ist nach Bemerkung 1.21 konstruz
ierbar.
Alle weiteren Körpereigenschaften ”erbt” (Ω, +, ·) von (C, +, ·). Damit ist
der Beweis vollständig.
2
Bemerkung 1.33 Q(i) ist ein Teilkörper von Ω, Q(i) ≤ Ω.
Beweis.
Q(i) = {a + ib : a, b ∈ Q}
Ent
w
Nach Lemma 1.13 ist (Q(i), +, ·) ein Teilkörper von (C, +, ·). Die Frage
lautet also, ob Q(i) in Ω enthalten ist. Wegen Q ≤ Ω(R) ist jeder Punkt
(a, b) mit a, b ∈ Q konstruierbar. Daher liegt jedes Element von Q(i) in Ω. 2
Korollar 1.34 Es gilt die Beziehung
Q(i) $ Ω
√
√
Denn: Nach Satz 1.22 gilt 2 ∈ Ω(R), damit gilt trivialerweise 2 ∈ Ω.
Nun ist aber
√
2 ∈
/ Q(i) = {a + ib : a, b ∈ Q}.
Damit folgt Q(i) $ Ω.
Satz 1.35
∀z ∈ Ω:
√
± z ∈ Ω.
22
1 Konstruktion mit Zirkel und Lineal
Wir gehen nun zu Polarkoordinaten über:
1.5
Beweis. Sei z = x + iy ∈ Ω, z 6= 0. Dann wissen wir wegen Bemerkung
1.21, dass x und y konstruierbare reelle Zahlen sind, also gilt x, y ∈ Ω(R).
(Ω(R), +, ·) ist ein Körper,
also liegen x2 , y 2 und x2 +y 2 in Ω(R). Nach Satz
p
1.22 gilt dann auch x2 + y 2 ∈ Ω(R).
0 ≤ ϑ < 2π
z = x + iy = r(cosϑ + i sin ϑ),
p
r =
x2 + y 2
z = reiϑ
c
√
PSfrag replacements
c
urf
ϑ
√
− c
Abbildung 1.8. Konstruktion von
√
c
Erste Variante des Beweises:
√
Da r ∈ Ω(R), ist nach Satz 1.22 auch r ∈ Ω(R).
Da
√
√
ϑ
ϑ
z = ± r · cos + i sin
2
2
,
Ent
w
√
können wir ± z durch eine triviale Winkelhalbierung und Abschlagen von
√
r erhalten.
Damit haben wir die beiden Quadratwurzeln von z ∈ Ω konstruiert (Abbildung 1.8).
Zweite Variante des Beweises,
√ für jene, die es analytischer lieben:
Die Konstruierbarkeit von r wurde schon gezeigt. Es fehlt noch der Nachweis der Konstruierbarkeit von cos ϑ2 und sin ϑ2 .
Die reellen Zahlen cos ϑ und sin ϑ sind konstruierbar, da die komplexe Zahl
cos ϑ + i sin ϑ aus z = r · (cos ϑ + i sin ϑ) konstruierbar ist. Man bildet dazu
den Schnitt der Geraden Oc mit dem Einheitskreis.
Wegen der Beziehung
1.3 Winkeldreiteilung
23
ist dann cos2
ϑ
2
1.5
1 + cos ϑ
ϑ
= cos2
2
2
konstruierbar, nach Satz 1.22 sind auch die Quadratwurzel
cos
und die Zahl
ϑ
sin =
2
ϑ
2
r
1 − cos2
konstruierbar.
ϑ
2
2
Korollar 1.36 Sei K ≤ Ω und sei c ∈ K.
Dann gilt
√
K( c) ≤ Ω.
√
√
Denn: c ∈ K ⇒ c ∈ Ω ⇒ c ∈ Ω ⇒ K( c) ≤ Ω.
urf
Korollar 1.37 Eine komplexe Zahl z ist genau dann mit Zirkel und Lineal
konstruierbar, wenn es eine endliche Folge von Körpern Lj gibt mit den
Eigenschaften
1. Q = L0 ≤ L1 ≤ . . . LM ≤ C,
√
√ 2. Lj+1 = Lj
cj mit cj ∈ Lj , cj ∈
/ Lj ,
3. z ∈ LM .
Beweis. Sei z = a + ib mit a = Re z und b = Im z. Es gilt die Beziehung
z ist konstruierbar ⇔ a, b ∈ Ω(R) ⇔ (a, b) konstruierbar.
Nach Satz 1.28 gilt
z konstruierbar
⇒
∃ Körperkette wie in Korollar 1.37 behauptet,
indem wir LN +1 := KN (i) setzen.
Ent
w
⇒
∃ Körperkette wie in Satz 1.28
Nach Satz 1.35 bleiben wir bei den quadratischen Erweiterungen wie im
Schritt LN +1 := KN (i) stets im Körper Ω.
Umgekehrt impliziert die Existenz einer derartigen Körperkette sofort, dass
z ∈ Ω.
2
Satz 1.38 Der Körper Ω ist der kleinste
Teilkörper von C, der mit jedem
√
Element c auch eine Quadratwurzel c enthält.
24
1 Konstruktion mit Zirkel und Lineal
Beweis. Sei
1.5
√
K = K ≤ C : mit c ∈ K ist auch c in K .
Aus Satz 1.35 folgt, dass Ω ∈ K. Damit gilt K 6= ∅.
Sei
L=
\
K,
K∈K
dann gilt L ≤ C, wie wir nun beweisen werden.
Es ist L 6= ∅, da jeder Körper K ∈ K die Elemente 0 und 1 enthält, damit
auch die Durchschnittsmenge L. Die Eigenschaft L ⊆ C ist trivial, da Ω ∈ K
eine Teilmenge von C ist.
urf
Weiters zeigen wir, dass L ein Körper ist. Es reicht dazu der Nachweis, dass
für a, b ∈ L folgt, dass auch
a + b
−b
∈L
a · b
b−1
gilt, siehe Lemma 1.13.
Für die Addition ist der Beweis leicht geführt:
a, b ∈ L
⇒
⇒
⇒
a, b ∈ K
∀K ∈ K
a+b ∈K
∀K ∈ K
\
K=L
a+b ∈
K∈K
Ent
w
Für −b, a. b, b−1 läuft der Beweis analog. Somit ist die Behauptung L ≤ C
nachgewiesen.
√
Wir zeigen, dass für jedes c ∈ L die Zahl c in L liegt:
c ∈L
⇒
⇒
⇒
c ∈K
∀K ∈ K
√
c ∈ K ∀K ∈ K
√
c ∈ L.
Somit folgt, L ∈ K. Damit ist L der kleinste Teilkörper K von C mit der
Eigenschaft
√
c ∈ K.
c∈K ⇒
T
Wegen L = K∈K K und Ω ∈ K folgt L ≤ Ω.
Aus L ≤ C folgt
1.3 Winkeldreiteilung
⇒
⇒
⇒
⇒
Z⊆L
−1 ∈ L
√
−1 = i ∈ L
Q ⊆ L, Q(i) ⊆ L.
Daraus folgt sofort Q ≤ L und Q(i) ≤ L.
1.5
0, 1 ∈ L
25
Nach Korollar 1.37 liegt jede konstruierbare komplexe Zahl in einer quadratischen Erweiterung einer quadratischen Erweiterung einer
√ quadratischen
Erweiterung einer . . . (usw.) von Q. Da mit c ∈ L stets c ∈ L gilt und
Q ≤ L, Q(i) ≤ L ist, führt uns dieses fortgesetzte Adjungieren von Quadratwurzeln nicht aus L heraus. Das bedeutet also, dass jede konstruierbare
komplexe Zahl in L liegt. Somit gilt
Ω ≤ L.
Die Aussagen L ≤ Ω und Ω ≤ L ergeben insgesamt Ω = L.
2
urf
Satz 1.39 Der Winkel α = 60◦ kann nicht mit Zirkel und Lineal in drei
gleiche Teile geteilt werden.
Beweis. Wir betrachten dazu den Bogen auf dem Einheitskreis, der durch
den Winkel α = 60◦ definiert ist. Dieser Winkel entspricht im Bogenmaß
dem Winkel π/3. Wäre nun der Winkel α = π/9 = (π/3)/3 konstruierbar,
dann wäre die komplexe Zahl
z = cos
π
π
+ i sin
= eiπ/9
9
9
konstruierbar und umgekehrt. Die Nichtkonstruierbarkeit dieser komplexen
Zahl wird in Lemma 1.41 gezeigt werden. Mit dem Beweis dieses Lemmas ist
dann auch der Beweis des Satzes vollständig.
2
Ent
w
Bemerkung 1.40 Wir benötigen einige einfache Hilfsmittel zum Rechnen
mit komplexen Zahlen.
• Formel von De Moivre
(cos x + i sin x)
n
= cos nx + i sin nx
• Formel von Euler
eiy = cos y + i sin y
• Beispiele
∀y ∈ R
∀n ∈ N
26
1 Konstruktion mit Zirkel und Lineal
e2πi = 1
e
iπ
3
1.5
eπi = −1
√
π
1 + −3
π
=
=
= cos + i sin
3
3
2
Lemma 1.41 Die komplexe Zahl
π
ei 9 = cos
π
ei 9
3
π
π
+ i sin
9
9
ist nicht mit Zirkel und Lineal konstruierbar.
Beweis. Indirekt: Wir nehmen an, eiπ/9 sei konstruierbar. Dann existiert
nach Korollar 1.37 eine Körperkette
π
mit ei 9 ∈ LM ,
Q = L 0 ≤ L1 ≤ . . . ≤ L M
wobei Lj+1 jeweils eine quadratische Erweiterung von Lj ist.
π
Die Zahl ei 9 löst die Gleichung
1+
√
−3
urf
x
3
=
2
.
Damit gilt für den Körper LM :
√
Daraus folgt sofort
Q ≤ LM ,
−3 ∈ LM .
√
Q
−3
≤ LM .
Ent
w
Wir zeigen nun in zwei Schritten, dass keine solche Körperkette existiert.
Wieder beweisen wir dazu zwei Behauptungen, die uns dann zu einem Widerspruch zur Annahme führen werden.
√
Behauptung 1: Ist K ein beliebiger Körper mit Q( −3) ≤ K ≤ C und ist
die Gleichung
√
1 + −3
3
x =
2
√
in einer quadratischen Erweiterung K( c) lösbar, dann ist sie bereits im
Grundkörper K selbst lösbar.
Behauptung 2: Die Gleichung
x
√
3
=
1+
√
2
besitzt im Körper Q( −3) keine Lösung.
−3
1.3 Winkeldreiteilung
27
1.5
Beweis von Behauptung 1:
Sei
√
√ 3
1 + −3
3
mit a, b ∈ K.
a+b c = x =
2
Falls b = 0, so ist die Behauptung bereits erfüllt.
Betrachten wir also den nichttrivialen Fall b 6= 0.
3
√
2
2
3
√
a + 3a b c + 3ab c + b c c =
a3 + 3ab2 c
|
{z
}
+
√
1+
b(3a2 + b2 c) c =
∈K
Wäre nun 3a2 + b2 c 6= 0, dann wäre
√
c=
1+
√
1+ −3
2
− a3 − 3ab2 c
b (3a2 + b2 c)
√
2√
2
−3
−3
∈ K.
urf
√
Dies ist aber ein Widerspruch zur Voraussetzung, dass K( c) eine quadratische Erweiterung von K ist. Somit gelten die Gleichungen
3a2 + b2 c = 0,
√
1 + −3
3
2
a + 3ab c =
.
2
Bevor wir diese Gleichungen lösen, halten wir fest, dass wir b durch −b ersetzen können, ohne dass sich die Gleichungen ändern. Daher gilt
√
√ 3
1 + −3
.
a−b c =
2
Ent
w
Nun bestimmen wir eine weitere Lösung, indem wir die erste Gleichung in
der Form
3a2 = −b2 c
Schreiben und für b2 c in die zweite Gleichung einsetzen:
√
1 + −3
3
3
−8a = (−2a) =
2
Damit haben wir gezeigt, dass das Element −2a ∈ K die Gleichung
√
1 + −3
3
x =
2
löst.
Die Behauptung 1 ist somit gezeigt.
28
1 Konstruktion mit Zirkel und Lineal
1.5
Beweis von Behauptung 2:
Seien a, b, c ganze Zahlen mit
√
3
a b√
1 + −3
+
=
−3
c
c
2
und c ∈ N, (a, c) = (b, c) = 1.
Durch elementare Umformungen erhält man
2
a 3
3a b
9ab2
3b3 √
1√
1
−3 =
−3.
− 3
−
+
+
3
3
c
c
c
c
2
2
Es folgt durch Koeffizientenvergleich
c3
2
c3
.
=
2
a3 − 9ab2 =
3a2 b − 3b3
urf
Wegen a, b ∈ Z muss 2|c3 gelten, also c gerade sein. Wenn wir die zweite
Gleichung von der ersten subtrahieren, so erhalten wir
a3 − 3a2 b − 9ab2 + 3b3 = 0
⇒
3 | a3
⇒
3 | a.
Wegen der zweiten Gleichung gilt aber
3|
c3
2
⇒
3 | c3
⇒
3 | c.
Ent
w
Wenn aber 3 | a und 3 | c, dann gilt 3 | (a, c). Das ist aber ein Widerspruch zu
(a, c) = 1.
√
√
Somit besitzt x3 = 1+ 2 −3 in Q( −3) keine Lösung. Alle Behauptungen sind
nun gezeigt und somit ist auch das Lemma bewiesen.
2
Korollar 1.42 Es gibt konstruierbare Winkel, für die die Winkeldreiteilung
nicht mit Zirkel und Lineal durchführbar ist.
Bemerkung 1.43 Die Gleichung
x3 − 3x − 1 = 0
heißt die Winkeldreiteilungsgleichung. Sie besitzt, wie auch die Gleichung
x3 − 2 = 0,
drei Wurzeln α1 , α2 , α3 ∈ C mit folgenden Eigenschaften.
1.3 Winkeldreiteilung
29
• α1 + α2 + α3 = 0
1.5
√
√
• Wenn eine Wurzel α1 = a + b c im Körper
√ K( c) liegt, dann auch eine
zweite, die dann die Gestalt α2 = a − b c besitzt.
Für die dritte Wurzel α3 ergibt sich daraus
α3 = −α1 − α2 = −2a ∈ K.
Bemerkung 1.44 Ein alternativer Beweis von Satz 1.39 lässt sich wie folgt
angeben.
Beweis. Für die Konstruierbarkeit mit Zirkel und Lineal gilt:
Die komplexe Zahl cos π9 + i sin π9 ist konstruierbar,
⇔ cos π9 , sin π9 sind konstruierbare reelle Zahlen,
⇔ 2 cos π9 , 2 sin π9 sind konstruierbar,
√
⇔ 2 cos π9 konstruierbar, wegen sin α = 1 − cos2 α.
Weiters gilt
π π
π 3
π
+ i sin = cos + i sin
3
3
9
9
π
π
π
π
π
3 π
= cos
− 3 cos sin2 + i 3 cos2 sin − sin3
.
9
9
9
9
9
9
urf
cos
Stellt man die Realteile einander gegenüber, so erhält man
cos
π
π
π
π
= cos3 − 3 cos sin2
3
9
9 9
π
π
π
π
π
1 − cos2
= 4 cos3 − 3 cos .
= cos3 − 3 cos
9
9
9
9
9
Andererseits ist aber
cos
Ent
w
Daraus folgt
1
π
= .
3
2
1
π
π
= 4 cos3 − 3 cos
= 4u3 − 3u
2
9
9
mit u = cos π9 . Wir setzen nun x = 2u und erhalten die Gleichung
x3 − 3x − 1 = 0.
Wir zeigen nun, dass keine Lösung der Gleichung x3 − 3x − 1 = 0 mit
Zirkel und Lineal konstruierbar ist.
Dazu überlegen √
wir als Erstes, dass diese Gleichung in einer quadratischen
Erweiterung K( c) nur dann lösbar ist, wenn sie bereits im Grundkörper K
selbst lösbar ist.
30
1 Konstruktion mit Zirkel und Lineal
folgt
1.5
√
Sei dazu a + b c eine Lösung, mit a, b ∈ K, b 6= 0. Der Fall b = 0 ist hier
uninteressant, da trivial. Aus der Beziehung
√
√
(a + b c)3 − 3(a + b c) − 1 = 0
√
a3 + 3ab2 c − 3a − 1 + b 3a2 + b2 c − 3 c = 0
und schließlich
3a2 + b2 c − 3 = 0,
√
√
sonst wäre ja c ∈ K. Damit ist auch a − b c eine Lösung der Gleichung.
Die dritte Lösung erhalten wir, indem wir b2 c = 3 − 3a2 in die Gleichung
a3 + 3ab2 c − 3a − 1 = 0 einsetzen. Es ergibt sich
−8a3 + 6a − 1 = (−2a)3 − 3(−2a) − 1 = 0.
Das Element β = −2a ∈ K ist also die dritte Lösung von x3 − 3x − 1 = 0.
urf
Wir zeigen als Zweites: die Gleichung x3 − x − 1 = 0 ist in Q unlösbar. Sei
dazu m
n , m ∈ Z, n ∈ N, (m, n) = 1, eine Lösung dieser Gleichung in Q. Damit
gilt
m3 − 3mn2 − n3 = 0.
Wenn die Primzahl p die Zahl m teilt, dann muss sie auch n3 und wegen
der Primfaktorzerlegung auch n teilen. Damit können wir den Fall |m| > 1
ausschließen, sonst gäbe es ja einen Widerspruch zu (m, n) > 1. Ebenso leicht
führt die Annahme n > 1 auf einen Widerspruch zu (m, n) = 1. Es folgt
n = 1 und m = ±1. Die Zahlen ±1 sind aber offensichtlich keine Lösungen
von x3 − 3x − 1 = 0.
2
Bemerkung 1.45 Mit derselben Methode wie im vorangegangenen Beweis
von Bemerkung 1.44 können wir zeigen:
Ent
w
Sei p(x) = x3 + ax2 + bx + c ein Polynom mit rationalen Koeffizienten. Wenn
die Gleichung p(x) = 0 keine rationale Nullstelle besitzt, so nennt man das
Polynom p(x) irreduzibel über Q. Dafür ist offensichtlich notwendig, dass
c 6= 0.
Wenn p(x) irreduzibel über Q ist, dann ist keine Wurzel der Gleichung
p(x) = 0
mit Zirkel und Lineal konstruierbar.
Weiters kann man p(x) genau dann in ein Produkt, der Art
p(x) = (x − r)(x2 + sx + t)
mit rationalen Koeffizienten r, s, t zerlegen, wenn r ∈ Q eine Wurzel der
Gleichung p(x) = 0 ist, also wenn p(x) eine Nullstelle in Q besitzt.
1.4 Regelmäßige n-Ecke
31
1.5
1.4 Regelmäßige n-Ecke
Frage 1.46 Welche regelmäßigen n-Ecke sind mit Zirkel und Lineal konstruierbar?
Wir wissen:
• das regelmäßige 4-Eck ist konstruierbar ⇒ regelmäßiges 8-, 16-, . . . , 2n -Eck
ist konstruierbar,
• das regelmäßige 6-Eck ist konstruierbar ⇒ das regelmäßige 3-Eck ist konstruierbar.
Wir fassen in einer Tabelle zusammen, welche regelmäßigen n-Ecke mit n ≤
10 konstruierbar sind.
konstruierbar
√
√
√
√
urf
n
3
4
5
6
7
8
9
10
?
√
nein!
√
Bemerkung 1.47 Das regelmäßige n-Eck ist mit Zirkel und Lineal konstruierbar
⇔
2π
2π
+ i sin
n
n
⇔
konstruierbar,
2π
konstruierbar,
n
r
√
2π
2π
1 − cos2
weil sin
=
und c ∈ Ω ⇒ ± c ∈ Ω,
n
n
2π
2 cos
konstruierbar.
n
cos
Ent
w
⇔
ξ = e2πi/n = cos
Bemerkung 1.48 Zum Fall n = 9: Das regelmäßige 18-Eck ist nicht konstruierbar, da cos π9 = cos 2π
18 nach Lemma 1.41 nicht konstruierbar ist. Daher
ist der doppelte Winkel 2π
9 ebenfalls nicht konstruierbar.
Lemma 1.49 Das regelmäßige 7-Eck ist nicht konstruierbar.
Beweis. Sei ξ = e2πi/7 . Dann gilt ξ 7 = 1, daher ist ξ eine Nullstelle des
Polynoms
32
1 Konstruktion mit Zirkel und Lineal
x7 − 1.
1.5
Wegen
x7 − 1 = (x − 1)(x6 + x5 + · · · + x + 1)
und ξ 6= 1 folgt, dass ξ eine Nullstelle des Polynoms x6 + x5 + · · · + x + 1 ist.
Nun ist aber
x6 + x 5 + · · · + x + 1 = 0
gleichbedeutend mit
1
1
1
+ 1 = 0,
x3 + 3 + x2 + 2 + x +
x
x
x
wie man selbst leicht nachrechnen kann.
Setzen wir
1
, so gilt
x
1
= x2 + 2 + 2
x
1
1
3
= x + 3 + 3 x+
.
x
x
y := x+
urf
y2
y3
Damit erhalten wir die Gleichung
y 3 − 3y + y 2 − 2 + y + 1 = 0,
bzw.
y 3 + y 2 − 2y − 1 = 0.
ξ 6 + ξ 5 + · · · + ξ + 1 = 0,
1
1
1
= 0.
ξ3 + 3 + ξ2 + 2 + ξ +
ξ
ξ
ξ
Ent
w
Nun gilt aber
⇒
−1
Wegen 2 cos 2π
=ξ+
7 =ξ+ξ =ξ+ξ
1
ξ
löst 2 cos 2π
7 die Gleichung
y 3 + y 2 − 2y − 1 = 0.
Diese Gleichung besitzt aber in Q keine Lösung, denn für y = m/n, (m ∈ Z,
m ∈ N, (m, n) = 1) ergibt sich
m3 + m2 n − 2mn2 − n3 = 0
Diese Gleichung ist aber nicht lösbar, wie eine einfache Teilbarkeitsüberlegung zeigt. Somit ist y 3 + y 2 − 2y − 1 irreduzibel über Q.
1.4 Regelmäßige n-Ecke
33
1.5
Aus Bemerkung 1.45 folgt, dass 2 cos 2π
7 nicht konstruierbar ist. Daher ist
auch das regelmäßige 7-Eck nicht mit Zirkel und Lineal konstruierbar.
2
Für das regelmäßige 5-Eck gilt (nachrechnen)
√
r √ 1
5−1
2πi/5
+
ξ = e
=
−2 5 + 5 .
4
4
Wir betrachten nun die Körperkette
L0 = Q ≤ L 1 = Q
√
−5
≤ L2 = L1
r
!
√ −2 5 + 5
.
Somit liegt ξ in L2 und das regelmäßige 5-Eck ist konstruierbar.
C.F. Gauß hat 1796 ganz allgemein gezeigt:
urf
Satz 1.50 Das regelmäßige n-Eck ist genau dann mit Zirkel und Lineal konstruierbar, wenn
n = 2 k · p1 · p2 · · · · · p l ,
wobei die pi , 1 ≤ i ≤ l, paarweise verschiedene Fermatsche Primzahlen sind
und k ≥ 0.
Dabei gilt: die Fermatschen Zahlen Ft haben die Form
t
Ft = 22 + 1,
t ≥ 0, t ∈ Z.
Für manche Werte des Parameters t, aber eben nicht für alle, ist Ft eine
Primzahl:
F0
F1
F2
F3
F4
F5
=3
prim
=5
prim
= 17
prim
= 257
prim
= 65537 prim
= 232 + 1 = 641 · 6700417
Ent
w
t=0
t=1
t=2
t=3
t=4
t=5
Die Faktorisierung von F5 stammt von Euler.
Definition 1.51 (Fermatsche Primzahlen)
t
Eine Primzahl der Form 22 + 1 heißt eine Fermatsche Primzahl.
urf
Ent
w
1.5
1.5
2 Gruppen
Inhalt
Der Begriff der Gruppe ist ein grundlegendes Konzept der modernen Algebra.
Er tritt in vielen anderen mathematischen Disziplinen auf.
Ziel
Wir lernen zentrale Konzepte der Algebra kennen, auf denen alles Weitere
aufbaut.
urf
Stichwörter
Die Stichwörter zu diesem Kapitel lauten
• Halbgruppe, Monoid, Gruppe
• Untergruppen und Normalteiler
• Faktorgruppen
• (Gruppen-)Homomorphismen und Isomorphismen
• Hauptsatz über endliche abelsche Gruppen
Literatur
R. Lidl und G. Pilz. Angewandte abstrakte Algebra I. Bibliographisches
Institut, Mannheim, 1982. (Vergriffen)
Ent
w
R. Lidl and G. Pilz. Applied Abstract Algebra. 2nd Edition. Springer Verlag,
Berlin 1998.
36
2 Gruppen
1.5
2.1 Definitionen
Beispiel 2.1 Für das Rechnen mit ganzen Zahlen gilt:
(G1) ∀ a, b ∈ Z :
a+b∈Z
(G2) Es gilt das sogenannte Assoziativgesetz,
∀ a, b, c ∈ Z.
a + (b + c) = (a + b) + c
(G3) Es existiert ein sogenanntes neutrales Element in Z,
∃e∈Z:
a+e = e+a = a
Dies ist natürlich die Zahl 0.
∀ a ∈ Z.
(G4) Zu jedem a ∈ Z existiert ein sogenanntes inverses Element −a in Z,
∃ −a∈Z:
a + (−a) = (−a) + a = e
∀ a ∈ Z.
urf
(G5) Es gilt das sogenannte Kommutativgesetz,
∀ a, b ∈ Z.
Beispiel 2.2 Wenn wir die Menge Zm = 0, 1, . . . , m − 1 der Restklassen
modulo m betrachten (m ∈ Z, m ≥ 2), dann gilt:
a + b = b+ a
(G1) ∀ a, b ∈ Zm :
a + b ∈ Zm
(G2) Es gilt das Assoziativgesetz,
a + (b + c) = (a + b) + c
∀ a, b, c ∈ Zm .
(G3) Es existiert ein neutrales Element in Zm ,
a+e = e+a = a
Ent
w
∃ e ∈ Zm :
∀ a ∈ Zm .
Dies ist natürlich die Restklasse 0.
(G4) Zu jedem a ∈ Zm existiert ein inverses Element −a in Zm ,
∃ − a ∈ Zm :
a + (−a) = (−a) + a = e
∀ a ∈ Zm .
(G5) Es gilt das Kommutativgesetz,
a + b = b+ a
∀ a, b ∈ Zm .
Beachten Sie: jede Restklasse a ist eine Menge mit unendlich vielen Elementen. Es ist erstaunlich, daß man mit solchen Mengen wie mit ganzen Zahlen
rechnen kann, siehe die Eigenschaften (G1) bis (G5).
2.1 Definitionen
37
1.5
Beispiel 2.3 Wenn wir die Menge der stetigen, reellwertigen Funktionen
vom Intervall [0, 1] in die reellen Zahlen mit dem Symbol C([0, 1]) bezeichnen
und die “Summe” f +g zweier Funktionen f, g ∈ C([0, 1]) durch die Definition
x ∈ [0, 1]
(f + g)(x) := f (x) + g(x),
festlegen, dann gilt:
(G1) ∀ f, g ∈ C([0, 1]) : f + g ∈ C([0, 1]).
(G2) Es gilt das Assoziativgesetz:
∀ f, g, h ∈ C([0, 1]).
f + (g + h) = (f + g) + h
(G3) Es existiert ein neutrales Element in C([0, 1]),
∃ e ∈ C([0, 1]) :
f +e = e+f = f
∀ f ∈ C([0, 1]).
Die Funktion e ist die Nullfunktion, e(x) = 0 ∀ x ∈ [0, 1].
∃ − f ∈ C([0, 1]) :
urf
(G4) Zu jedem f ∈ C([0, 1]) existiert ein inverses Element −f in C([0, 1]),
∀ f ∈ C([0, 1]).
f + (−f ) = (−f ) + f = e
(G5) Es gilt das Kommutativgesetz,
f + g = g+ f
∀ f, g ∈ C([0, 1]).
Beispiel 2.4 Wenn wir die Menge der regulären 2 × 2-Matrizen über R mit
GL(2, R) bezeichnen und auf der Menge GL(2, R) das Produkt zweier Matrizen betrachten, dann gilt:
(G1) ∀ A, B ∈ GL(2, R) :
A · B ∈ GL(2, R).
Ent
w
(G2) Es gilt das Assoziativgesetz,
A · (B · C) = (A · B) · C
∀ A, B, C ∈ GL(2, R).
(G3) Es existiert ein neutrales Element in GL(2, R),
∃ E ∈ GL(2, R) :
A·E = E·A = A
∀ A ∈ GL(2, R).
10
Dies ist natürlich die Einheitsmatrix E =
.
01
(G4) Zu jedem A ∈ GL(2, R) existiert ein inverses Element A−1 in GL(2, R),
∃ A−1 ∈ GL(2, R) :
A · A−1 = A−1 · A = E
∀ A ∈ GL(2, R).
38
2 Gruppen
(G5) Das Kommutativgesetz gilt allerdings nicht:
∃ A, B ∈ GL(2, R) :
1.5
A · B 6= B · A.
Bemerkung 2.5 Wir haben in Beispiel 2.1 mit ganzen Zahlen gerechnet
und die Eigenschaften (G1) bis (G5) festgestellt. In Beispiel 2.2 haben wir
mit Mengen (Restklassen sind ja Mengen!) und in Beispiel 2.3 mit Funktionen gerechnet, wie wenn es sich um Zahlen handeln würde. In Beispiel 2.4
haben wir als Grundmenge die Menge GL(2, R) gewählt und ebenfalls einen
Großteil dieser Eigenschaften wiedergefunden, allerdings war in Gegensatz zu
den anderen Beispielen die Eigenschaft (G5) nicht erfüllt.
urf
Die Vorgangsweise war in all diesen Beispielen die gleiche: wir haben zwei
beliebige Elemente a, b einer Grundmenge G genommen und diesen beiden
Elementen ein drittes Element mit Namen a + b (siehe die ersten Beispiele)
oder mit Namen a · b (siehe Beispiel 2.4) zugeordnet. Das neue Element lag
wieder in der Grundmenge G, siehe dazu jeweils die Eigenschaft (G1). Man
sagt dazu: die Elemente a und b wurden miteinander verknüpft und nennt die
Operation (bei uns “+” beziehungsweise “·”) die Verknüpfungsvorschrift. Wir
konnten dann mit diesen Elementen (Zahlen, Mengen, Funktionen, Matrizen)
im Wesentlichen wie mit ganzen Zahlen “rechnen”.
GL(2,
R)
10
Neutrales Element 0
0
Nullfunktion E =
01
Inverses Element −a −a = −a
−f
A−1
inverse Matrix
Kommutativ
ja
ja
ja
nein
Menge
Z
Zm
C([0, 1])
Tabelle 2.1. Beispiele von Mengen
Ent
w
Dieses allgemeine Prinzip, einem Paar (a, b) von zwei Elementen einer Grundmenge G ein Element von G zuzuordnen, führt uns zu folgenden abstrakten
Begriffen.
Definition 2.6 (Halbgruppe, Monoid, Gruppe)
Sei G 6= ∅. Unter einer inneren Verknüpfung (manchmal auch: binäre Operation) auf G verstehen wir eine Abbildung von G × G in G, (a, b) 7→ a · b,
a, b ∈ G.
Für das Paar (G, ·) können verschiedene Eigenschaften erfüllt sein:
(G1) ”·” ist eine innere Verknüpfung auf G.
(G2) Es gilt das Assoziativgesetz,
a · (b · c) = (a · b) · c
∀ a, b, c ∈ G.
2.1 Definitionen
39
(G3) Es existiert ein neutrales Element in G,
a·e = e·a = a
∀ a ∈ G.
1.5
∃e ∈ G :
(G4) Zu jedem a ∈ G existiert ein inverses Element a−1 in G,
∃a−1 ∈ G :
a · a−1 = a−1 · a = e
(G5) Es gilt das Kommutativgesetz,
∀ a, b ∈ G
∀ a ∈ G.
a · b = b· a
Das Paar (G, ·) heißt
• eine Halbgruppe, wenn (G1) und (G2) erfüllt sind.
• ein Monoid, wenn (G1), (G2) und (G3) erfüllt sind.
• eine Gruppe, wenn (G1), (G2), (G3) und (G4) erfüllt sind.
• eine abelsche oder kommutative Gruppe, wenn (G1) bis (G5) erfüllt sind.
urf
Die Ordnung der Gruppe (G, ·) ist definiert als die Anzahl der Elemente in
der Menge G. Wir bezeichnen diese Zahl mit dem Symbol |G|.
Eine Gruppe (G, ·) heißt endlich, wenn |G| < ∞ sonst heißt sie unendlich.
Beispiel 2.7 Die folgenden Paare (H, ·) sind Halbgruppen:
(N, +), (N, ·), (R, max), wobei x max y := max{x, y}.
Sei M 6= ∅ und sei P(M ) die Potenzmenge von M , dann sind (P(M ), ∩) und
(P(M ), ∪) Halbgruppen.
Ent
w
Beispiel 2.8 Wichtige Beispiele für Gruppen sind:
abzählbar unendliche abelsche Gruppen: (Z, +), (Q, +)
überabzählbar unendliche abelsche Gruppen: (R, +), (C, +)
endliche abelsche Gruppen: (Zm , +)
überabzählbar unendliche nichtabelsche Gruppen: Wir wählen als Beispiel
GL(n, R). Abzählbare oder endliche nichtabelsche Gruppen sind ebenfalls
leicht anzugeben: GL(2, Q) oder GL(2, Zm ).
Bemerkung 2.9 Es existiert also zu jeder gegebenen natürlichen Zahl m
eine abelsche Gruppe mit m Elementen, nämlich die Gruppe (Zm , +), die
additive Gruppe der Restklassen modulo m. Können Sie zu jedem m auch
eine nichtabelsche Gruppe mit m Elementen angeben?
Für die Bezeichnung der inneren Verknüpfung einer Gruppe können wir
natürlich ein beliebiges Symbol wählen. Wir könnten also schreiben (G, ♣),
oder (G, 3), oder (G, 1), . . . (usw.) Da man aber stillschweigend an Rechenoperationen denkt, wie wir sie vom Rechnen mit Zahlen gewohnt sind, werden
meist die Bezeichnungen (G, +) und (G, ·) verwendet.
40
2 Gruppen
1.5
Genauso willkürlich ist die Bezeichnung des inverses Elementes. Wenn wir
die Gruppe in der Form (G, +) schreiben, dann wird traditionell das inverse Element zu a mit −a bezeichnet. Man spricht dann von einer additiven
Gruppe. (Man hat stillschweigend an Gruppen wie (Z, +) gedacht)
Wenn wir die Gruppe in der Form (G, ·) schreiben, dann wird das inverse
Element zu a mit a−1 bezeichnet. Man spricht dann von einer multiplikativen
Gruppe. (Man hat stillschweigend an Gruppen wie (R \ {0}, ·) gedacht)
Es stellen sich einige Fragen:
• Gibt es unter Umständen mehrere neutrale Elemente in einer Gruppe?
• Gibt es Gruppen, in denen manche Elemente mehrere inverse Elemente
besitzen?
Die Antwort ist einfach, wie das folgende Lemma zeigt.
Lemma 2.10 Für jede Gruppe (G, ·) gilt
1. das neutrale Element e von (G, ·) ist eindeutig,
3. ∀a ∈ G :
4. ∀a, b ∈ G :
5. ∀a, b ∈ G:
das Inverse a−1 zu a ist eindeutig ∀a ∈ G,
−1
= a,
a−1
urf
2. ∀a ∈ G:
(a · b)
−1
= b−1 · a−1 ,
die Gleichungen
a·x = b
y ·a = b
besitzen eindeutige Lösungen x und y in G.
Korollar 2.11 Es gilt die Kürzungsregel.
⇒
⇒
Ent
w
a·g = a·h
g ·a = h·a
g = h
g = h
Beweis. (zu Lemma 2.10)
Zu 1.
Wir nehmen an es gebe zwei unterschiedliche neutrale Element e und e0 in
G. Da e neutral ist, gilt e · e0 = e0 . Da e0 neutral ist gilt auch e · e0 = e. Somit
folgt die Gleichheit e = e0 was ein Widerspruch zur Annahme ist, dass e und
e0 verschieden sind.
Zu 2.
Sei a ∈ G beliebig.
Wir nehmen an a−1 und b seien zwei unterschiedliche inverse Elemente von
a. Dann folgt aber der Widerspruch a−1 = b wegen
2.1 Definitionen
41
= (b · a) a−1 = a−1 .
| {z }
e
1.5
b=b·e=b a· a
−1
Zu 3.
Sei a ∈ G beliebig, dann gibt es wegen (G4) zu a ein inverses Element a−1 ∈
−1
G. Zu a−1 gibt es wieder ein Inverses a−1
.
a−1 · a
a−1 · a
= e
−1 −1
= e
)
⇒ a−1
−1
= a, wegen Punkt 2.
Zu 4.
Wir wenden das Assoziativgesetz (G2) an.
(a · b) · b−1 · a−1 = a · b · b−1 · a−1 = a · e · a−1 = e
urf
Zu 5.
Um zu zeigen, dass a · x = b lösbar ist multiplizieren wir von links mit a−1
und erhalten
a−1 · (a · x) = a−1 · b
x = a
−1
·b
⇒
was eine Lösung der ursprünglichen Gleichung darstellt. Um zu zeigen, dass
die Lösung eindeutig ist, nehmen wir an es existieren zwei Lösungen x und
x0 . Somit gilt
a
−1
a · x = a · x0
· (a · x) = a
⇒
−1
x = x0 .
⇒
· (a · x0 )
Ent
w
Damit ist der Beweis abgeschlossen.
2
Bemerkung 2.12 Wir hätten in der Definition einer Gruppe (G, ·) die Eigenschaften (G3) und (G4) durch das folgende Paar von dazu äquivalenten
Bedingungen ersetzen können:
(G3’) Es existiert ein neutrales Element in G,
∃e∈G:
e·a = a
∀ a ∈ G.
(G4’) Zu jedem a ∈ G existiert ein inverses Element a−1 in G,
∃ a−1 ∈ G :
a−1 · a = e
∀ a ∈ G.
42
2 Gruppen
1.5
Der Beweis dazu ist einfach: Wenn b das Inverse zu a−1 bezeichnet (d.h.
b = a−1 ), dann gilt:
(a−1 · a) · a−1 = e · a−1 = a−1 ,
⇒ (b · a−1 ) · (a · a−1 ) = b · a−1 = e
⇒ a · a−1 = e.
Beispiel 2.13 Sei S 6= ∅, sei A(S) die Menge der bijektiven Funktionen von
S nach S und sei ◦ die Hintereinanderausführung von Funktionen, also
f ◦g :
(f ◦ g)(x) := f (g(x)).
Dann ist (A(S), ◦) eine nichtabelsche Gruppe, falls |S| > 2. Ein Element von
A(S) heißt eine Permutation von S.
Definition 2.14 (Symmetrische Gruppe)
Sei S eine endliche Menge mit n Elementen. Die Gruppe (A(S), ◦) heißt die
symmetrische Gruppe vom Grad n und wird mit Sn bezeichnet.
urf
Bemerkung 2.15 Wir wissen bereits: A(S) ist die Menge der Permutationen von S. Daher ist die Anzahl der Elemente in A(S) gleich der Zahl
|Sn | = n ! .
Wir führen nun eine häufig gebrauchte Schreibweise für die Permutation einer
Menge S ein: Jedes f ∈ Sn wird eindeutig durch die Angabe der Bilder der
Elemente von S festgelegt. Also schreibt man f in der Form
x1
x2 . . . x n
.
f (x1 ) f (x2 ) . . . f (xn )
Ent
w
Da f (xi ) ein Element von S ist, schreiben wir für f (xi ) nun xi1 mit i1 ∈
1, . . . , n. Es kommt also nur auf die Permutation der Indizes an. Somit kann
man die Variable x weglassen. Wir schreiben für f deswegen
1 2 ... n
.
i1 i2 . . . i n
Beispiel 2.16 Die symmetrische Gruppe S3 . Wir wählen drei Permuationen
aus:
123
123
123
.
,
g =
,
f =
e =
231
213
123
Dann erhält man die folgenden Beziehungen durch Nachrechnen:
123
123
2
2
f ◦g = g ◦f =
6= g ◦ f = f ◦ g =
132
321
123
g 3 = g ◦ g ◦ g = e ⇒ g 2 = g −1 =
312
2.1 Definitionen
43
1.5
Wir haben nun 6 Elemente von S3 gefunden. Wegen |S3 | = 3 ! = 6 sind dies
schon alle. Wir tragen alle möglichen Verknüpfungen von Elementen aus S3 in
eine Tabelle ein. Diese Tabelle heißt die Gruppentafel oder Verknüpfungstafel
der Gruppe S3 .
◦
e
f
g
f ◦ g f ◦ g2 g2
e
e
f
g
f ◦ g f ◦ g2 g2
f
f
e
f ◦g
g
g2 f ◦ g2
2
2
g
g f ◦g
g
f
f ◦g
e
f ◦ g f ◦ g g2 f ◦ g2 e
g
f
f ◦ g2 f ◦ g2 g
f
g2
e
f ◦g
2
2
g
g
f ◦g
e f ◦ g2 f
g
Bemerkung 2.17 Für eine Gruppentafel (Verknüpfungstafel) gilt:
1. Sei (G, ·) eine endliche Gruppe. Dann ist (G, ·) kommutativ genau dann,
wenn die Gruppentafel symmetrisch bezüglich der Hauptdiagonale ist.
urf
Also sei G kommutativ und e das neutrale Element, dann hat die Gruppentafel die Form
· e ···
ee
.. . .
.
.
f
..
.
g
..
.
f
···
..
g ···
f ·g
.
g·f
..
.
Ent
w
wobei f · g = g · f für alle Elemente f, g ∈ G.
2. Sei (G, ·) eine Gruppe, dann tritt in jeder Zeile und in jeder Spalte der
Gruppentafel jedes Element genau einmal auf. Die Gruppentafel hat ja
die Form
· ··· b ··· d ···
..
.
a ··· a · b ··· a · d ···
..
.
Wäre nun a · b = a · d, dann gilt wegen der Kürzungsregel (Korollar 2.11)
b = d. Für Spalten argumentieren wir analog.
44
2 Gruppen
1.5
Beispiel 2.18 Sei Q ein Quadrat der Ebene E = R2 mit dem Mittelpunkt
M = (0, 0). Wir betrachten alle Bewegungen der Ebene, also alle jene Abbildungen von E in sich, die Längen und Winkel unverändert lassen. Welche
dieser Bewegungen von E bilden Q deckungsgleich auf sich ab? Wir nennen
solche Bewegungen Deckabbildungen des Quadrats Q.
Wie viele Deckabbildungen von Q gibt es? Bezeichne G die Menge der
Deckabbildungen von Q. Seien A, B, C, D die vier Ecken von Q, gegen den
Uhrzeigersinn bezeichnet. Die Ecke A kann auf höchstens 4 Ecken landen,
die Ecke B muß zu A benachbart bleiben, daher gibt es für das Bild von
B höchstens 2 Möglichkeiten. Mit der Festlegung der Bilder von A und B
sind dann aber auch die Bilder von C und D festgelegt. Daraus folgt: es gibt
höchstens 4 · 2 · 1 · 1 = 8 Deckabbildungen von Q, d.h. |G| ≤ 8.
Man überlegt sich nun Folgendes. Wenn a die Drehung von Q um 90◦ um
den Mittelpunkt M bezeichnet und b die Spiegelung von Q um die x-Achse,
dann gilt:
G = e, a, a2 , a3 , b, a ◦ b, a2 ◦ b, a3 ◦ b .
urf
Durch die Relationen a4 = e, b2 = e und b◦a = a3 ◦b ist die Verknüpfungstafel
für (G, ◦) bereits festgelegt.
Das Paar (G, ◦) bildet eine nichtabelsche Gruppe, wie man leicht nachprüft.
Es gibt somit genau 8 Deckbewegungen von Q.
Allgemein gilt: Sei G die Menge der Deckbewegungen eines regelmäßigen nEckes der Ebene und bezeichne ◦ wieder die Hintereinanderausführung von
Funktionen. Bezeichne a die Drehung um 360/n Grad um den Mittelpunkt
und b die Spiegelung an einer festen Achse. Man kann zeigen:
1. G besitzt 2n Elemente und es gilt
G = e, a, a2 , . . . , an−1 , b, a ◦ b, a2 ◦ b, . . . , an−1 ◦ b .
Ent
w
2. Das Paar (G, ◦) ist eine nichtabelsche Gruppe.
3. Die Verknüpfungstafel ist durch die Relationen an = e, b2 = e und b ◦ a =
an−1 ◦ b festgelegt.
Definition 2.19 (Diedergruppe)
Diese Gruppe heißt die Diedergruppe und wird mit Dn bezeichnet.
Bemerkung 2.20 Wir können somit für jede gerade natürliche Zahl n eine
nichtabelsche Gruppe der Ordnung n angeben: die Gruppe (Dn , ◦). Einfaches Durchprobieren aller möglichen Fälle für die Verknüpfungstafel zeigt,
dass es im Fall n = 3 nur eine abelsche Gruppe der Ordnung 3 gibt und
keine nichtabelsche Gruppe der Ordnung 3 existieren kann. Daher gilt: es
gibt ungerade natürliche Zahlen n, für die keine nichtabelsche Gruppe dieser
Ordnung existiert.
2.1 Definitionen
45
1.5
Beispiel 2.21 Sei S = {z ∈ C : |z| = 1} der Einheitskreis. Wir können
die Elemente von S in der Form z = eiϕ mit 0 ≤ ϕ < 2π schreiben. Diese
Darstellung ist umkehrbar eindeutig. Sei
%n : S → S
%n (e ) = ei(ϕ+ n )
2π
iϕ
die Drehung um den Winkel 2π
n . Dann ist %n eine bijektive Abbildung von
S auf S. Wir bezeichnen nun die zusammengesetzte Abbildung %n ◦ %n mit
%n 2 , %n ◦ %n ◦ %n mit %n 3 und so weiter und setzen
%n 0 := id .
Dann gilt
%n k ∈ A(S)
∀k ∈ Z, k ≥ 0.
k
Was bewirkt die Abbildung %n ? Für k ∈ N oder k = 0 ist dies klar,
%n k (eiϕ ) = ei(ϕ+k
2π
n
)
∀ϕ, 0 ≤ ϕ < 2π.
−1
urf
Für k ∈ N definieren wir
%n −k =
%n k
.
Auf diese Weise ist %n k nun für alle k ∈ Z erklärt.
Bemerkung 2.22 Sei G := %n k : k ∈ Z . Dann ist (G, ◦) eine abelsche
Gruppe, die sogenannte zyklische Gruppe mit n Elementen. Es gilt die Beziehung
G ⊆ A(S),
wobei (G, ◦) eine abelsche und (A(S), ◦) eine nichtabelsche Gruppe ist. Der
Beweis dieser Behauptung ist leicht.
Ent
w
Definition 2.23 (Untergruppe)
Sei (G, ·) eine Gruppe. Eine nichtleere Teilmenge H von G heißt eine Untergruppe, falls (H, ·) selbst eine Gruppe ist.
Schreibweise: H ≤ G.
Lemma 2.24 Sei (G, ·) eine Gruppe und H 6= ∅, H ⊆ G. Dann gilt:
1. (H, ·) ist eine Untergruppe von (G, ·) genau dann, wenn
(UG1)
(UG2)
∀ a, b ∈ H :
∀a ∈ H :
a · b ∈ H,
a−1 ∈ H.
2. (H, ·) ist eine Untergruppe von (G, ·) genau dann, wenn
(UG)
∀ a, b ∈ H :
a · b−1 ∈ H.
Die Aussagen (UG1) und (UG2) sind also zur Aussage (UG) äquivalent.
46
2 Gruppen
3. Sei (G, ·) eine abelsche Gruppe. Dann gilt
⇒
H abelsch.
1.5
H ≤ G
Die Umkehrung ist im allgemeinen falsch, siehe dazu Bemerkung 2.22.
4. Sei H eine endliche Teilmenge von G. Dann gilt
H erfüllt (UG1)
⇒
H ≤ G.
5. Sei (G, ·) eine endliche Gruppe und H ⊆ G. Dann gilt
H erfüllt (UG1)
⇒
6. Sei H ≤ G und G ≤ K. Dann gilt
H ≤ G.
H ≤ K.
Zu 2.
Wir zeigen
urf
Beweis.
Zu 1.
Da nach Annahme H ≤ G gilt, sind (UG1) und (UG2) erfüllt. Wenn umgekehrt (UG1) und (UG2) gelten, dann sind die Gruppeneigenschaften (G1)
und (G4) erfüllt. Wegen H 6= ∅ existiert ein Element a ∈ H. Nach (UG2)
liegt a−1 in H und nach (UG1) liegt auch a · a−1 in H. Nun liegen aber a
und a−1 auch in G. Damit ist e = a · a−1 in H enthalten und H erfüllt daher
(G3). Die Eigenschaft (G2) gilt für alle Elemente von G, also automatisch
für jene der Teilmenge H.
(UG1) und (UG2)
⇐⇒
(UG).
(⇐): Sei a ∈ H, beliebig. In (UG) setzen wir a = b.
e ∈ H
⇒
(UG2) gilt.
Ent
w
⇒
⇒
e · a−1 = a−1 ∈ H
Seien a und b zwei Elemente aus H. Da wir jetzt (UG2) anwenden dürfen,
ist auch b−1 in H. In (UG) betrachten wir Für die Elemente a, b−1 ∈ H liegt
wegen (UG) auch das Produkt a · b−1 in H, daraus ergibt sich
a · b−1
(⇒): Trivial.
Zu 3.
Trivial.
−1
= a·b ∈ H
⇒
(UG1) gilt.
2.1 Definitionen
47
H endlich
1.5
Zu 4.
Wenn H ein Element a 6= e enthält, dann liegen auch alle Elemente an mit
n ∈ N in H.
⇒
∃ n, m ∈ N mit n > m, sodass
⇒
(wegen Kürzungsregel) an−m = e.
⇒
an−m · am = am
a n = am
Wegen a 6= e muss n − m > 1 gelten. Daher können wir weiters schreiben
n−m−1
a·a
| {z } = e.
∈H
Wegen der Eindeutigkeit von a−1 folgt a−1 = an−m−1 ∈ H.
Zu 5.
Folgt aus 4.
Zu 6.
Klar.
urf
2
Bemerkung 2.25 Ab jetzt schreiben wir für das Element
a·b
nur mehr, bis auf seltene Ausnahmen im Skriptum, kurz
ab
Beispiel 2.26 Sei (G, ◦) wie in Bemerkung 2.22. Dann gilt
G ≤ A(S).
Ent
w
Lemma 2.27 Sei (G, ·) eine Gruppe und a ∈ G. Weiters sei
hai := ak : k ∈ Z ,
wobei
a0 := e
an := a
| · a ·{z. . . · a}
n mal
n −1
a−n := (a )
für n ∈ N
für n ∈ N .
Dann gilt:
1. a−n =
a−1
n
,
∀ n ∈ N.
2. (hai, ·) eine Untergruppe der Gruppe (G, ·).
48
2 Gruppen
Beweis. Es ist leicht nachzurechnen, dass
∀k, l ∈ Z.
1.5
ak · al = ak+l
Der Beweis der Behauptung erfolgt nun durch Fallunterscheidung für k und
l (k, l ≥ 0, k, l < 0, usw.).
Mit ak liegt auch das Element a−k in hai. Es gilt dann ak · a−k = a0 = e.
−1
Daher gilt ak
= a−k ∀ k ∈ Z.
2
Definition 2.28 (zyklische Gruppe, erzeugendes Element)
Die Gruppe (hai, ·) heißt die von a erzeugte zyklische Untergruppe der Gruppe (G, ·).
Eine Gruppe (G, ·), |G| ≥ 2, heißt eine zyklische Gruppe, wenn ein Element
a in G existiert mit hai = G.
Ein solches Element a heißt ein erzeugendes Element der zyklischen Gruppe
(G, ·).
Bemerkung 2.30
urf
Beispiel 2.29 Die prime Restklassengruppe (Z∗12 , ·) ist ein Beispiel einer
endlichen, nichtzyklischen Gruppe. Die abelsche Gruppe (R, +) ist eine nichtzyklische Gruppe mit (überabzählbar) unendlich vielen Elementen.
1. Jede zyklische Gruppe ist abelsch.
2. Nicht jede abelsche Gruppe ist zyklisch.
Beweis.
Zu 1.
Seien al und ak zwei beliebige Elemente einer zyklischen Gruppe, dann ist
nach kurzer Rechnung klar, dass
∀ k, l ∈ Z.
Ent
w
ak al = a l ak
Zu 2.
Trivial.
2
Bemerkung 2.31 Sei (G, ·) eine Gruppe und W 6= ∅, W ⊆ G. Weiters sei
hW i = w1 k1 . . . wr kr : wi ∈ W ; ki ∈ Z; r ∈ N; i = 1, 2, . . . , r .
Dann gilt (nachrechnen!)
1. hW i ≤ G
2. (hW i, ·) ist die kleinste Untergruppe von (G, ·), die die Menge W als
Teilmenge enthält.
2.1 Definitionen
hW i =
\
H
1.5
3. Es gilt
49
H≤G
W ⊆H
Definition 2.32 (Erzeugte Untergruppe)
Die Gruppe (hW i, ·) heißt die durch die Menge W erzeugte Untergruppe von
(G, ·).
Eine Gruppe (G, ·) heißt endlich erzeugt, wenn es eine endliche Teilmenge
W von G gibt mit hW i = G.
Lemma 2.33 Sei (G, ·) eine Gruppe und sei H eine Untergruppe von G. Für
a, b ∈ G nennen wir das Element a äquivalent zu b bezüglich H, geschrieben
als
a ∼H b,
wenn gilt:
a b−1 ∈ H.
urf
Die Relation ∼H ist eine Äquivalenzrelation in der Menge G.
Beweis. Wir müssen nachweisen, dass für die Relation ∼H die folgenden drei
Eigenschaften gelten:
reflexiv:
symmetrisch:
transitiv:
a ∼H a
a ∼H b
a ∼ H b ∧ b ∼H c
⇒
⇒
b ∼H a
a ∼H c
Der Nachweis ist leicht.
∀ a ∈ G,
∀ a, b ∈ G,
∀ a, b, c ∈ G.
2
Beispiel 2.34 Wir betrachten (G, ·) = (Z, +). Sei m ∈ Z, m ≥ 2, und sei
H := hmi. Dann gilt für zwei Elemente a, b ∈ Z:
⇔
a − b ∈ H = hmi,
Ent
w
a ∼H b
wegen der Definition von ∼H und weil −b das inverse Element zu b ist. Dies
ist wegen der speziellen Gestalt von hmi äquivalent zur Aussage, dass es ein
k ∈ Z gibt mit
a − b = k · m.
Dies ist wiederum äquivalent zur Aussage m|a − b, und zu
a ≡ b (mod m) .
Wir haben also mittels der Äquivalenzrelation ∼hmi den Begriff der Kongruenz verallgemeinert.
50
2 Gruppen
1.5
Definition 2.35 (Rechtsnebenklasse, Linksnebenklasse)
Sei (G, ·) eine Gruppe und sei H ≤ G.
Unter einer Rechtsnebenklasse von H in G verstehen wir eine Teilmenge von
G der Gestalt
Hg := {h g : h ∈ H} ,
für ein beliebiges Element g aus G.
Analog wird der Begriff der Linksnebenklasse von H in G definiert,
gH := {g h :
h ∈ H} .
Wir nennen Hg die durch g bestimmte Rechtsnebenklasse von H in G.
Definition 2.36 (Index)
Sei (G, ·) eine beliebige Gruppe und H eine Untergruppe von G. Unter dem
Index der Untergruppe H in G verstehen wir die Anzahl der verschiedenen
Rechtsnebenklassen von H in G.
Schreibweise: [G : H]
urf
Wir vergleichen nun, wie diese Begriffe für einen Prototyp einer Gruppe und
wie sie im allgemeinen Fall aussehen, siehe Tabelle 2.2. Es ist nicht ganz leicht
Begriff
Prototyp
Allgemein
Gruppe (G, ·)
(Z, +)
(G, ·)
Untergruppe H
hmi
H
Relation
a ≡ b (mod m)
a ∼H b
Nebenklassen
hmi + a
Ha
Restklassen(Zm , +)
?
gruppe
= {hmi, hmi + 1, . . . , hmi + (m − 1)}
Index [G : H]
m
?
Ent
w
Tabelle 2.2. Zum Begriff der Nebenklasse
zu erkennen, unter welchen Bedingungen an die Untergruppe H die Menge
{Ha : a ∈ G} der Nebenklassen zu H eine Gruppe bildet. Wir werden sehen,
dass es dafür stärkere Voraussetzungen für H braucht als nur H ≤ G. Das
Stichwort lautet Normalteiler.
Lemma 2.37 Die Rechtsnebenklasse Ha ist gerade die Äquivalenzklasse von
a bezüglich der Äquivalenzrelation ∼H ,
Ha = {b ∈ G :
a ∼H b}
Beweis. Wir definieren
a := {b ∈ G :
a ∼H b}.
2.1 Definitionen
51
a ∼H h a
1.5
Behauptung I: Ha ⊆ a.
Sei a ein beliebiges Element aus G. Dann gilt:
⇔
a(h a)−1 ∈ H
⇔
⇔
h−1 ∈ H
h ∈ H.
⇔
a(a−1 h−1 ) ∈ H
Somit gilt für alle h ∈ H, dass a ∼H ha. Es folgt ha ∈ a
∀ h ∈ H.
Behauptung II: a ⊆ Ha.
Sei dazu b ∈ a beliebig. Nach Definition der Menge a gilt a ∼H b, dies
bedeutet nach Definition dieser Relation, dass a b−1 ∈ H. Es existiert also
ein h ∈ H mit a b−1 = h. Daraus folgt h−1 a = b. Da h−1 ebenfalls ein
Element von H ist (siehe (UG2)), folgt b ∈ Ha.
2
Lemma 2.38 Sei H eine Untergruppe von G, dann gilt
Insbesondere gilt
urf
1. Die Menge {Ha : a ∈ G} der Rechtsnebenklassen von H in G bildet eine
Partition von G. Es gilt also entweder Ha = Hb oder Ha ∩ Hb = ∅.
Ha = Hb
Ha = H
⇔
⇔
a ∼H b,
a ∈ H.
2. Es existiert eine bijektive Abbildung von Ha auf Hb. Die beiden Mengen
Ha und Hb sind also gleichmächtig.
Beweis.
Zu 1.
Die Mengen Ha mit a ∈ G sind die Äquivalenzklassen zu einer Äquivalenzrelation, daher ist die Menge {Ha : a ∈ G} eine Partition von G.
Ent
w
Sei nun Ha = Hb. H ist eine Untergruppe von G. Deshalb ist e ∈ H und
daher auch b ∈ Ha. Daraus folgt wegen Lemma 2.37 b ∼H a bzw. a ∼H b.
Sei nun a ∼H b. Daraus folgt nach Lemma 2.37, dass b ∈ Ha. Wegen b ∈ Hb
ist gilt Ha ∩ Hb 6= ∅. Wegen der Partitionseigenschaft bleibt nur mehr die
Möglichkeit Ha = Hb.
Sei Ha = H. Wegen e ∈ H folgt daraus a ∈ H.
Sei umgekehrt a ∈ H. Dann gilt für alle h ∈ H, dass ha ∈ H. Also folgt Ha ⊆
H. Damit haben die beiden Partitionsmengen H = He und Ha nichtleeren
Durchschnitt. Es folgt H = Ha.
Zu 2.
Wir betrachten die Abbildung
52
2 Gruppen
Ha → Hb
ha 7→ hb.
1.5
ϕ:
ϕ ist injektiv, denn aus ϕ(ha) = ϕ(h0 a) folgt hb = h0 b und wegen der
Kürzungsregel (Korollar 2.11) schließlich h = h0 . Weiters kann man leicht
sehen, dass ϕ auch surjektiv ist.
2
Satz 2.39 (Satz von Lagrange)
Sei (G, ·) eine endliche Gruppe und H eine Untergruppe von G. Dann gilt
|H| |G|.
Beweis. Alle Rechtsnebenklassen Ha besitzen nach Lemma 2.38(2) gleich
viele Elemente, insbesondere gilt
|Ha| = |H|
für alle a ∈ G.
urf
Die Rechtsnebenklassen bilden nach Lemma 2.38(1) eine Partition von G,
also
[
G =
Ha.
a∈G
Da G endlich ist, kann es nur endlich viele verschiedene Rechtsnebenklassen
geben. Seien dies die Nebenklassen H, Ha1 , Ha2 , . . . , Hak . Dann sind diese
Mengen paarweise disjunkt und für ihre Vereinigung gilt
H ∪ Ha1 ∪ · · · ∪ Hak = G.
Daraus folgt
Ent
w
|G| = |H| + |Ha1 | + · · · + |Hak | = (k + 1) |H|.
Bemerkung 2.40
Falls G eine endliche Gruppe ist, gilt
|G|
bzw.
[G : H] =
|H|
2
[G : H] · |H| = |G|.
Auch im Fall, dass G eine unendliche Gruppe ist, kann es in manchen Fällen
Untergruppen H von G geben mit [G : H] < ∞.
Definition 2.41 (Ordnung eines Elementes, Torsionsgruppe)
Sei (G, ·) eine Gruppe, a ∈ G.
Unter der Ordnung des Elements a in G verstehen wir die natürliche Zahl
2.1 Definitionen
ordG (a) := min{n ∈ N :
53
an = e},
1.5
falls diese Menge nichtleer ist. Andernfalls definieren wir die Ordnung von a
als ordG (a) = ∞.
Schreibweise: ordG (a)
Wenn G nur Elemente endlicher Ordnung besitzt, dann heißt (G, ·) eine Torsionsgruppe.
Wenn alle Elemente von G außer dem neutralen Element von unendlicher
Ordnung sind, dann heißt die Gruppe torsionsfrei.
Beispiel 2.42
∗
1. (G, ·) = (Z12 , ·)
ordZ∗12 (5) = ordZ∗12 (7) = ordZ∗12 (11) = 2
∗
2. (G, ·) = (Z5 , ·)
urf
ordZ∗5 (2) = ordZ∗5 (11) = 4
ordZ∗5 (4) = 2
Frage 2.43 Wie hängt die Ordnung ordG (a) eines Elements a von G mit der
Ordnung der von a erzeugten zyklischen Untergruppe hai von G zusammen?
Lemma 2.44
ordG (a) = |hai|
Beweis. Sei ordG (a) = n < ∞.
Dann gilt an = e wobei n minimal ist. Nach dem Satz von der Division mit
Rest gibt es zu jedem k ∈ Z genau ein q ∈ Z und genau ein r ∈ Z mit
0 ≤ r < n, sodass k = q n + r. Demnach ist
Ent
w
ak = a r .
Die Elemente der zyklischen Untergruppe hai sind also e, a, a2 , . . . , an−1 .
Wir prüfen noch, ob dies genau n verschiedene Elemente sind. Angenommen
ar = a s ,
mit r 6= s. Ohne Beschränkung der Allgemeinheit sei r ≥ s. Aus der
Kürzungsregel (Korollar 2.11) folgt ar−s = e. Wegen 0 ≤ r − s < n muss
r − s = 0 gelten, denn 0 < r − s wäre ein Widerspruch zur Minimalität von
n. Somit gilt |hai| = n = ordG (a).
Sei ordG (a) = ∞.
Das heißt also an 6= e
∀ n ∈ N. Ähnlich wie im endlichen Fall zeigen
54
2 Gruppen
1.5
wir, dass für r 6= s auch ar 6= as . Die Elemente von hai haben aber alle
die Form ar mit r ∈ Z. Es gibt davon unendlich viele, also erhalten wir
|hai| = ∞ = ordG (a).
Sei umgekehrt n = |hai| < ∞.
Es gilt ak 6= e für 1 ≤ k ≤ n − 1, sonst wäre |hai| < n. Damit kennen wir
schon n Elemente von hai, es muss also gelten:
hai = e, a, a2 , . . . , an−1 .
Es gilt weiters an = an−k · ak 6= ak ∀ k, 1 ≤ k ≤ n − 1, denn sonst wäre nach
der Kürzungsregel (Korollar 2.11) ja an−k = e. Dies wäre ein Widerspruch
zu |hai| = n. Wegen an ∈ hai und |hai| = n muss daher an = e gelten. Es
folgt ordG (a) = n = |hai|.
Sei |hai| = ∞.
Dann gilt ak 6= ah für alle k, h ∈ Z mit k 6= h. Sonst wäre ak−h = e und in
Folge |hai| eine endliche Zahl. Es gilt also ak 6= e für alle k ∈ N, was bedeutet,
dass ordG (a) = ∞.
2
urf
Korollar 2.45 Sei (G, ·) eine endliche Gruppe und a ∈ G. Dann gilt
ordG (a) |G|.
Beweis. Wegen hai ≤ G folgt mit dem Satz von Lagrange (Satz 2.39)
|hai| = ordG (a) |G|.
2
Korollar 2.46 Sei (G, ·) eine endliche Gruppe und a ∈ G. Dann gilt
a|G| = e.
Ent
w
Beweis. Laut Definition ist aordG (a) = e, weiters gilt ordG (a) |G|.
Es gibt also ein k ∈ N mit |G| = k · ordG (a). Daraus folgt
a|G| =
aordG (a)
k
= ek = e.
Satz 2.47 (Satz von Euler)
Seien m ∈ N, m ≥ 2 und a ∈ Z mit (a, m) = 1. Dann gilt
aϕ(m) ≡ 1
(mod m).
2
2.1 Definitionen
55
∗
Beweis. Wir setzen G = Zm . Also ist |G| = ϕ(m). Wegen (a, m) = 1 gilt
∗
⇒
1.5
⇒
a ∈ Zm
aϕ(m) = 1
aϕ(m) ≡ 1
(mod m).
2
Satz 2.48 (Satz von Fermat)
Seien p prim und a ∈ Z beliebig. Dann ist
ap ≡ a
Beweis.
Falls a ≡ 0
(mod p).
(mod p) ist die Behauptung trivial.
Falls a 6≡ 0, dann gilt (a, p) = 1. Nach dem Satz von Euler gilt
ap−1 ≡ 1
(mod p)
urf
p
⇒
a
≡ a
(mod p).
2
Korollar 2.49 Sei (G, ·) eine endliche Gruppe und sei |G| prim. Dann ist
(G, ·) zyklisch und damit abelsch.
Beweis. Aus der Voraussetzung
|G| prim folgt |G| ≥ 2. Daher existiert ein
a ∈ G mit a 6= e. Da |hai| |G|, |G| prim und |hai| ≥ 2, muss |hai| = |G| sein
und daher gilt hai = G.
2
Ent
w
Korollar 2.50 Wenn n eine Primzahl ist, dann gibt es keine nichtabelsche
Gruppe mit n Elementen.
Zur Existenz abelscher und nichtabelscher Gruppen einer vorgegebenen Ordnung n können wir nun präzise Aussagen machen, siehe Tabelle 2.3. Zu jeder
Ordnung n geben wir jeweils ein Standardbeispiel für eine Gruppe mit n Elementen an. Dabei bezeichnet (Zn , +) die additive Gruppe der Restklassen
modulo n und (Dn/2 , ◦) die Diedergruppe (siehe dazu Definition 2.19).
Die Frage nach der Existenz abelscher und nichtabelscher Gruppen einer
vorgegebenen Ordnung n haben wir nun, wenn auch nicht vollständig, so
zumindest recht zufrieden stellend geklärt. Damit stellt sich aber eine weitere
Frage: wie viele verschiedene Gruppen der Ordnung n gibt es und wie findet
man sie? Diese Frage werden wir für endliche abelsche Gruppen im Detail
diskutieren, siehe den Hauptsatz über endliche abelsche Gruppen, Satz 2.104.
56
2 Gruppen
1.5
Gruppe \ Ordnung n gerade
n ungerade, prim
Abelsche Gruppe
existiert: (Zn , +) existiert: (Zn , +)
Nichtabelsche Gruppe existiert: (Dn/2 , ◦) existiert nicht
Tabelle 2.3. Existenz von Gruppen der Ordnung n
2.2 Normalteiler und Faktorgruppen
Die folgende Frage wurde in Kapitel 2.1 bereits gestellt, aber noch nicht
beantwortet.
Frage 2.51 Unter welchen Bedingungen an die Untergruppe H bildet die
Menge {Ha : a ∈ G} der Rechtsnebenklassen zu H eine Gruppe?
Auch die folgende Frage ist bereits formuliert, aber noch nicht beantwortet
worden.
urf
Frage 2.52 Seien (G, ·) und (G0 , ◦) Gruppen und zwischen diesen die Abbildung
ϕ : G → G0
definiert. Welche Eigenschaft muss die Abbildung ϕ besitzen, damit ϕ(G)
eine Gruppe ist und wie sieht diese Gruppe aus ?
Der Weg zur Antwort auf diese Fragen ist etwas mühsam, aber lohnend und
führt über den Begriff des Normalteilers.
Definition 2.53 (Kongruenzrelation)
Sei (G, ·) eine Gruppe. Eine Äquivalenzrelation ”∼” in der Menge G heißt
eine Kongruenzrelation in der Gruppe (G, ·), wenn gilt
a ∼ c und b ∼ d
⇒
a·b∼c·d
für a, b, c, d ∈ G. Man sagt dann, die Äquivalenzrelation sei mit der Verknüpfung ”·” verträglich.
Ent
w
Satz 2.54 Für eine Untergruppe H einer Gruppe G sind folgende Aussagen
äquivalent:
1. ∼H ist eine Kongruenzrelation in G, also mit der Gruppenoperation verträglich.
2. Jede Linksnebenklasse von H in G ist auch eine Rechtsnebenklasse:
∀g ∈ G :
3. ∀ g ∈ G, ∀ h ∈ H :
4. ∀ g ∈ G :
5. ∀ g ∈ G :
g h g −1 ∈ H
g H g −1 ⊆ H
g H g −1 = H
gH = Hg.
2.2 Normalteiler und Faktorgruppen
57
1.5
Beweis.
Wir zeigen: 1. ⇒ 2.
Sei h g ∈ Hg beliebig, dann ist wegen Lemma 2.37
h g ∼H g.
Da ∼H eine Kongurenzrelation ist, dürfen wir auf beiden Seiten von links
mit g −1 multiplizieren. So erhalten wir
g −1 (h g) ∼H e
⇒ g −1 (h g) ∈ H
⇒ h g ∈ gH
⇒ Hg ⊆ gH.
Sei g h ∈ gH beliebig, dann folgt
h−1 g −1 ∼H g −1
urf
⇒
h−1 g −1 ∈ Hg −1
wegen Lemma 2.37. Wir dürfen wieder auf beiden Seiten von links mit g h
multiplizieren, weil ∼H eine Kongruenzrelation ist:
g h h−1 g −1 ∼H g h g −1
Es folgt weiters
⇒
⇒
e ∼H g h g −1
g h g −1 ∈ H
gH ⊆ Hg.
Wir haben somit gezeigt, dass
∀g ∈ G.
Ent
w
gH = Hg
Wir zeigen: 2. ⇒ 3.
Sei g h ∈ gH = Hg beliebig, dann folgt wieder wegen Lemma 2.37 g h ∼H g,
nach Definition von ∼H gilt weiters g h g −1 ∈ H.
Die Beziehung 3. ⇔ 4. ist trivial.
Wir zeigen: 3. ⇒ 1.
Wir wissen seit Lemma 2.33, dass ∼H eine Äquivalenzrelation ist. Zu zeigen
ist also nur mehr die Verträglichkeit mit der Gruppenoperation. Für a ∼H c
und b ∼H d ist also nachzuweisen, dass ab ∼H cd. Nach Definition von ∼H
gilt
a b ∼H c d ⇔ a b (c d)−1 = a b d−1 c−1 ∈ H.
58
2 Gruppen
Deswegen gehen wir wie folgt vor:
b ∼H d
⇒
⇒
a c−1 ∈ H
1.5
a ∼H c
b d−1 ∈ H
Wegen Punkt 3. folgt daraus, dass
a b d−1 a−1 ∈ H
und, da H eine Gruppe ist, gilt weiters
a b d−1 a−1 · a c−1 = a b d−1 c−1 ∈ H.
Wir zeigen: 4. ⇔ 5.
Angenommen
gHg −1 ⊆ H
für alle g ∈ G. Dann ist aber auch
urf
g −1 Hg ⊆ H
(2.1)
für alle g ∈ G. Wir schreiben H als
H = g g −1 Hg g −1 .
Wegen Gleichung (2.1) ist
H = g g −1 Hgg −1 ⊆ gHg −1 .
Zusammen mit der Voraussetzung in Punkt 4. folgt die Gleichheit
Ent
w
H = gHg −1 .
2
Definition 2.55 (Normalteiler)
Eine Untergruppe H von G, die eine der fünf Bedingungen in Satz 2.54 erfüllt,
nennen wir einen Normalteiler von G.
Schreibweise: H E G
Wir nennen H einen echten Normalteiler, falls H E G und H $ G und
schreiben in diesem Fall H C G.
Korollar 2.56 Jede Untergruppe einer abelschen Gruppe G ist ein Normalteiler von G.
Bemerkung 2.57
2.2 Normalteiler und Faktorgruppen
59
1.5
1. Für den Nachweis, dass eine Untergruppe H von G Normalteiler von
G ist, ist es meist am bequemsten, die Bedingung (3) von Satz 2.54 zu
überprüfen.
2. In jeder Gruppe G gibt es die trivialen Normalteiler {e} und G selbst.
Alle anderen Normalteiler heißen eigentliche Normalteiler von G.
Definition 2.58 (Einfache Gruppe)
Eine Gruppe (G, ·) heißt einfach, wenn sie keine eigentlichen Normalteiler
besitzt.
Beispiel 2.59 Jede Gruppe (Zp , +) mit p prim ist einfach. Dies folgt aus
dem Satz von Lagrange: es gibt nur die trivialen Untergruppen und damit
gibt es keine eigentlichen Normalteiler.
Beispiel 2.60 Sei (G, ·) = (S3 , ◦) wobei S3 wie in Beispiel 2.16 definiert sei,
S3 = e, f, g, g 2 , f g, f g 2 ,
wobei
123
123
f =
123
213
g =
123
231
urf
e =
Sei H = {e, f }, dann ist
.
[S3 : H] = 3.
Es gibt also drei Rechts- und drei Linksnebenklassen zu H in S3 , siehe Tabelle
2.4. Wir beobachten, dass Hg nicht unter den Linksnebenklassen vorkommt.
Rechtsnebenklassen
H
Hg = {g,
f g} Hg 2 = g 2 , f g 2
Linksnebenklassen
H
gH = g, gf = f g 2 g2 H = g2 , g2 f = f g
Ent
w
Tabelle 2.4. Die Nebenklassen zu H = {e, f }
Daher ist H zwar eine Untergruppe von G, in Symbolen H < G, aber kein
Normalteiler von G (vgl. mit Satz 2.54(2)).
Sei H = {e, g, g 2 }, dann ist der Index von H in S3
[S3 : H] = 2.
Es gibt also zwei Rechts- und zwei Linksnebenklassen, siehe siehe Tabelle 2.5.
Daher hat diese Untergruppe H von S3 die Eigenschaft
Ha = aH
Aus Satz 2.54(2) folgt H C S3 .
∀ a ∈ S3 .
2 Gruppen
Rechtsnebenklassen
H
Hf = f, gf = f g 2 , g 2 f = f g
Linksnebenklassen
H
f H = Hf (nachrechnen)
1.5
60
Tabelle 2.5. Die Nebenklassen zu H = {e, g, g 2 }.
Satz 2.61 Die Menge aller Kongruenzrelationen in einer Gruppe G ist genau
die Menge
{ ∼N : N E G } .
Beweis. Aus Satz 2.54(1) und Definition 2.55 folgt, dass für jeden Normalteiler N von G die Relation ∼N eine Kongruenzrelation in G ist.
Sei nun ∼ eine beliebige Kongruenzrelation in G. Somit ist ∼ eine Äquivalenzrelation in G und es gilt die Verträglichkeitseigenschaft
a ∼ c, b ∼ d
⇒
a·b∼c·d
Wir setzen
urf
für beliebige a, b, c, d ∈ G. Sei weiters e ∈ G das neutrale Element.
N := {g ∈ G :
und zeigen N ≤ G.
g ∼ e}
Seien g, h ∈ N . Dann ist h ∼ e und da ∼ eine Kongruenzrelation ist, folgt
e ∼ h−1 und h−1 ∼ e. Aus g ∼ e folgt dann
gh−1 ∼ e · e = e.
Daher gilt gh−1 ∈ N , somit ist (UG) erfüllt (siehe dazu Lemma 2.24(2)).
Ent
w
Wir zeigen N E G.
Seien g ∈ G und h ∈ N beliebig.
h∼e
ghg −1 ∼ gg −1 = e
⇒
gh ∼ g
⇒
⇒
N EG
(wegen Satz 2.54(3))
⇒
ghg −1 ∈ N
Wir zeigen ∼ = ∼N . Es gilt nämlich
g∼h
⇔
gh−1 ∼ hh−1 = e
⇔
g ∼N h.
⇔
gh−1 ∈ N
2
2.2 Normalteiler und Faktorgruppen
61
AB = {ab :
1.5
Definition 2.62 Sei (G, ·) eine Gruppe. Für zwei nichtleere Teilmengen A
und B von G definieren wir das Produkt von A mit B durch
a ∈ A, b ∈ B}.
Lemma 2.63 Sei N eine Untergruppe von G. N ist ein Normalteiler von G
genau dann, wenn das Produkt von zwei Rechtsnebenklassen von N wieder
eine Rechtsnebenklasse von N in G ist.
Beweis. Für jede Untergruppe H der Gruppe G gilt
H = HH.
Dies ist einfach nachzuweisen:
h=h·e
h · h0 ∈ H
∀h∈H
∀ h, h0 ∈ H
)
⇒ H ⊆ HH ⊆ H
urf
Sei N ein Normalteiler von G. Dann gilt wegen N a = aN , dass
(N a)(N b) = N (aN )b = N (N a)b = N N ab
= N ab
Sei umgekehrt für zwei beliebige Elemente a, b ∈ G
Na · Nb = Nc
mit c ∈ G.
Dann ist zu zeigen, dass N ein Normalteiler von G ist. Was können wir über
c aussagen? Da N eine Untergruppe von G ist, muss das neutrale Element e
in N enthalten sein. Somit gilt:
e∈N
⇒
ab ∈ N a · N b = N c
Ent
w
Daher ist ab ∈ N c. Wegen ab ∈ N (ab) folgt
N c ∩ N ab 6= ∅.
Lemma 2.38 besagt, dass die Menge {N g : g ∈ G} der Rechtsnebenklassen
eine Partition von G bildet. Deshalb muss
N c = N ab
sein. Somit gilt
N a · N b = N ab
∀ a, b ∈ G.
Daraus folgt
N g · N g −1 = N · (gN g −1 ) = N
∀g∈G
⇒
gN g −1 ⊆ N.
62
2 Gruppen
Daher ist N ein Normalteiler von G.
Damit ist der Beweis vollständig.
1.5
Wir überlegen noch den letzten Schluss: Für a ∈ gN g −1 , beliebig, gilt e · a ∈
N · (gN g −1 ). Daher liegt a = e · a nach (2.2) in N . Da a beliebig war, gilt
gN g −1 ⊆ N .
2
Bemerkung 2.64 Lemma 2.63 ist viel interessanter, als es auf den ersten
Blick scheinen mag. Wir interessieren uns für die Frage, unter welchen Bedingungen für die Untergruppe N der Gruppe (G, ·) die Menge der Rechtsnebenklassen {N a : a ∈ G} mit der Verknüpfung (N a, N b) 7→ N a · N b eine
Gruppe bildet, siehe Frage 2.51. Nach Lemma 2.63 ist diese Verknüpfung eine innere Verknüpfung genau dann, wenn N ein Normalteiler von G ist. Die
Bedingung (G1) ist also für das Paar ({N a : a ∈ G}, ·) genau dann erfüllt,
wenn N E G gilt. Der folgende Satz 2.65 besagt, dass aus N E G nicht nur
(G1), sondern sogar (G2), (G3) und (G4) folgen.
Satz 2.65 Sei N ein Normalteiler von (G, ·) und sei
urf
G/N := {N a : a ∈ G}
die Menge der Rechtsnebenklassen von N in G. Dann gilt
1. (G/N, ·) ist eine Gruppe.
2. Wenn die Gruppe (G, ·) endlich ist, so gilt
|G/N | = [G : N ] =
|G|
.
|N |
Beweis.
Zu 1.
(G1) gilt nach Lemma 2.63.
Ent
w
(G2) ist einfach nachzurechnen:
N a · (N b · N c) = N a · N bc = N a(bc) = N abc
(N a · N b) · N c = (N ab) · N c = N (ab)c = N abc
Wegen der Assoziativität von G gilt diese also auch für G/N .
(G3)
N e = N ist das neutrale Element von G/N .
(G4)
Zu N a ist die Nebenklasse N a−1 das inverse Element.
Zu 2.
Folgt direkt aus dem Satz von Lagrange.
2
2.3 Homomorphismen
63
1.5
Definition 2.66 (Faktorgruppe)
Sei (G, ·) eine Gruppe und N ein Normalteiler von G. Die Gruppe (G/N, ·)
heißt die Faktorgruppe von G nach N .
Bemerkung 2.67 Wir haben den Begriff der Faktorgruppe für Rechtsnebenklassen definiert. Wir hätten genauso gut mit Links- statt mit Rechtsnebenklassen arbeiten können. Der langwierige Aufbau vom Begriff der Rechtsnebenklasse über die Äquivalenzrelation ∼H (siehe Lemma 2.33), den Beweis
des Satzes von Lagrange (siehe Satz 2.39), bis hin zum Begriff der Faktorgruppe hätte sich ohne jede inhaltliche Änderung auch für Linksnebenklassen
durchführen lassen. Es ist dem persönlichen Geschmack überlassen, mit welchem Typ von Nebenklassen man arbeitet.
2.3 Homomorphismen
urf
Die folgende Frage haben wir bereits am Anfang von Kapitel 2.2 gestellt (siehe
Frage 2.52), aber dort noch nicht beantworten können. In diesem Kapitel
werden wir die Lösung präsentieren können.
Frage 2.68 Seien (G, ·) und (G0 , ◦) Gruppen und zwischen diesen die Abbildung
ϕ : G → G0
definiert. Welche Eigenschaft muss die Abbildung ϕ besitzen, damit ϕ(G)
eine Gruppe ist und wie sieht diese Gruppe aus ?
Definition 2.69 (Homomorphismus)
Seien (G, ·) und (G0 , ◦) zwei Gruppen und sei ϕ : G → G0 eine Abbildung
von G in G0 .
Die Abbildung ϕ heißt ein (Gruppen-) Homomorphismus, wenn gilt
Ent
w
ϕ(a · b) = ϕ(a) ◦ ϕ(b)
∀ a, b ∈ G.
Wir definieren weiters:
Monomorphismus:
Epimorphismus:
Isomorphismus:
Automorphismus:
ein
ein
ein
ein
injektiver Homomorphismus
surjektiver Homomorphismus
bijektiver Homomorphismus
Isomorphismus mit G0 = G
Bemerkung 2.70 Der Einfachheit halber schreiben wir für ϕ(a·b) = ϕ(a)◦
ϕ(b) ab nun
ϕ(a b) = ϕ(a) ϕ(b).
64
2 Gruppen
ϕ : G → G0
ϕ(a) = e0
1.5
Beispiel 2.71 Sei e0 das neutrale Element von G0 . Wir betrachten die Abbildung
∀a∈G
Dann ist ϕ ein Homomorphismus von G in G0 .
Als ein weiters einfaches Beispiel sei
ϕ: G → G
ϕ(a) = a
∀a∈G
Dann ist ϕ ein Automorphismus von G.
Beispiel 2.72 Sei x ∈ G ein festes Element von G und sei
ϕ: G → G
ϕx (a) = xax−1
∀a∈G
urf
Dann ist ϕx ein Automorphismus von G.
Definition 2.73 (Innere Automorphismen)
Die Abbildung ϕx heißt der durch das Element x bestimmte innere Automorphismus von G.
Wenn G eine abelsche Gruppe ist, dann ist jeder innere Automorphismus ϕx
von G gleich der Identität auf G. In abelschen Gruppen gibt es also nur einen
inneren Automorphismus, die Identität.
Beispiel 2.74 Sei (G, ·) = (Z, +), sei m ≥ 2, m ∈ Z, und sei
ϕ : Z → Zm
∀ a ∈ Z.
ϕ(a) = a
Ent
w
Dann ist ϕ ein Epimorphismus.
Beispiel 2.75 Sei (G, ·) = (R, +), (G0 , ◦) = (R\{0}, ·) und
ϕ : G → G0
ϕ(a) = 2a
Dann ist ϕ ein Homomorphismus von G in G0 . ϕ ist offensichtlich nicht surjektiv, also kein Epimorphismus.
Beispiel 2.76 Sei G = S3 = {e, f, g, g 2 , f g, f g 2 }, G0 = {e, f } und
ϕ : G → G0
ϕ(f i g j ) = f i
i = 0, 1
j = 0, 1, 2
2.3 Homomorphismen
65
ϕ(f ) = f
1.5
(wobei f 0 = g 0 = e) Wir bestimmen das Bild von G unter ϕ :
ϕ(g) = e = ϕ(g 2 )
ϕ(f g) = f = ϕ(f g 2 )
Wir sehen durch Nachrechnen: ϕ ist ein Epimorphismus von G auf G0 .
Beispiel 2.77 Sei (G, ·) = (R+ , ·), (G0 , ◦) = (R, +) und
ϕ : G → G0
ϕ(x) = ln x
Dann gilt: ϕ ist ein Isomorphismus von R+ auf R und ϕ−1 : y 7→ ey ist
ebenfalls ein Isomorphismus.
Lemma 2.78 Sei N E G und
ϕ : G → G/N
urf
ϕ(g) = N g.
Dann gilt: ϕ ist ein Epimorphismus von G auf G/N .
Beweis. Es ist trivial, dass ϕ surjektiv ist, da G/N = {N g : g ∈ G}.
ϕ ist ein Homomorphismus:
ϕ(gh) = N gh = N g N h = ϕ(g) ϕ(h)
2
Ent
w
Definition 2.79 (Kern, Bild)
Sei ϕ : G → G0 ein Homomorphismus und sei e0 das neutrale Element von
G0 . Die Menge
ker ϕ = {g ∈ G : ϕ(g) = e0 }
heißt der Kern von ϕ. Die Menge
im ϕ = ϕ(G)
nennt man das Bild von ϕ.
Lemma 2.80 Sei ϕ : G → G0 ein Homomorphismus. Dann gilt:
1. ϕ(e) = e0 , wobei e das neutrale Element von G bezeichnet und e0 das
neutrale Element von G0 .
2. ϕ(g −1 ) = ϕ(g)
−1
∀ g ∈ G.
66
2 Gruppen
1.5
Beweis.
Zu 1. Sei g ∈ G beliebig.
ϕ(g) e0 = ϕ(g) = ϕ(g e) = ϕ(g) ϕ(e).
Aus der Kürzungsregel (siehe Korollar 2.11) folgt
e0 = ϕ(e).
Zu 2. Sei g ∈ G beliebig. Es gilt
ϕ(g) ϕ(g)
−1
= e0 = ϕ(e) = ϕ(g g −1 ) = ϕ(g) ϕ(g −1 )
Aus der Kürzungsregel (siehe Korollar 2.11) folgt
ϕ(g)
−1
= ϕ(g −1 ).
2
Lemma 2.81 Sei ϕ : G → G0 ein Homomorphismus. Dann gilt:
urf
1. im ϕ ist eine Untergruppe von G0 .
2. ker ϕ ist ein Normalteiler von G.
3. Sei N ein beliebiger Normalteiler von G. Dann existiert eine Gruppe G0
und ein Homomorphismus ϕ : G → G0 mit N = ker ϕ.
Beweis.
Zu 1. Seien a, b ∈ im ϕ. Dann gibt es g, h ∈ G mit ϕ(g) = a und ϕ(h) = b.
Es folgt
a b = ϕ(g) ϕ(h) = ϕ(g h) ∈ im ϕ.
Sei a ∈ im ϕ. Dann existiert ein g ∈ G mit a = ϕ(g). Daraus folgt
−1
= ϕ(g −1 ) ∈ im ϕ.
Ent
w
a−1 = ϕ(g)
Zu 2. Der Kern von ϕ kann niemals leer sein. Nach Lemma 2.80(1) ist ja
zumindest e ∈ ker ϕ. Seien g, h ∈ ker ϕ, nicht notwendigerweise verschieden.
Es gilt
−1
ϕ(g h−1 ) = ϕ(g) ϕ(h−1 ) = ϕ(h)
= (e0 )−1 = e0
Somit ist g h−1 ∈ ker ϕ. Daher ist ker ϕ eine Untergruppe von G.
Seien g ∈ G und h ∈ ker ϕ beliebig.
ϕ(g h g −1 ) = ϕ(g) e0 ϕ(g)
⇒
⇒
g ker ϕ g −1 ⊆ ker ϕ
ker ϕ E G
−1
= e0
2.3 Homomorphismen
67
Zu 3. Wir definieren die Abbildung
1.5
ϕ : G → G/N,
ϕ(g) = N g.
Dann ist ϕ ein Epimorphismus, wie leicht zu zeigen ist. Weiters gilt
ker ϕ = {g ∈ G : ϕ(g) = N }
= {g ∈ G : N g = N }
= {g ∈ G : g ∈ N }
= N.
2
Lemma 2.82 Sei ϕ : G → G0 ein Homomorphismus, sei K = ker ϕ und
seien g, g 0 so, dass ϕ(g) = g 0 . Dann gilt
ϕ−1 ({g 0 }) = Kg.
urf
Beweis. Es existiert zu beliebigem a ∈ Kg ein k ∈ K mit a = kg. Es gilt
ϕ(a) = ϕ(kg) = e0 ϕ(g) = g 0
⇒
Kg ⊆ ϕ−1 ({g 0 })
Sei b ∈ ϕ−1 ({g 0 }). Dann gilt:
ϕ(b) = ϕ(g) = g 0
⇒ ϕ(b g −1 ) = e0
⇒ ∃k∈K:
⇒ b ∈ Kg
b g −1 = k
Ent
w
⇒ ϕ−1 ({g 0 }) ⊆ Kg
2
Definition 2.83 (Isomorphie von Gruppen)
Zwei Gruppen (G, ·) und (G0 , ◦) heißen isomorph, wenn ein Isomorphismus
ϕ : G → G0 existiert.
Schreibweise: G ∼
= G0
Bemerkung 2.84
1. Sei ϕ : G → G0 ein Homomorphismus. Dann gilt:
ϕ ist injektiv
⇔
ker ϕ = {e}
Diese Behauptung folgt direkt aus Lemma 2.82.
68
2 Gruppen
2. Sei ϕ : G → G0 ein Epimorphismus. Dann gilt:
⇔
ker ϕ = {e}
1.5
ϕ ist ein Isomorphismus
3. Sei ϕ : G → G ein Homomorphismus. Dann gilt:
ϕ ist ein Automorphismus
⇔
⇔
ker ϕ = {e}
ϕ ist injektiv
4. ∼
= ist eine Äquivalenzrelation auf der Menge aller Gruppen.
5. ϕ : G → G0 ist ein Isomorphismus ⇔ ϕ ist bijektiv und ϕ und ϕ−1
sind Homomorphismen.
Satz 2.85 (Homomorphiesatz)
Für jeden Homomorphismus ϕ : G → G0 gilt:
G/ ker ϕ ∼
= im ϕ.
urf
Beweis. Sei K = ker ϕ. Wegen K E G ist die Faktorgruppe G/K definiert.
Wir definieren die Abbildung
ψ : G/K → im ϕ
ψ(Kg) = ϕ(g),
und müssen zeigen, dass ψ sinnvoll definiert ist. Die Definition muss unabhängig vom Repräsentanten der Nebenklasse Kg sein. Sei dazu Kg = Kh.
Wir müssen zeigen, dass dann ϕ(g) = ϕ(h) gilt.
Aus der Voraussetzung Kg = Kh folgt aus Lemma 2.38
Ent
w
⇒
g h−1 ∈ K
ϕ g h−1 = e0
⇒
⇒
ϕ(g) ϕ(h)
−1
= e0
ϕ(g) = ϕ(h).
ψ ist ein Homomorphismus:
ψ(Kg Kh) = ψ(Kgh) = ϕ(gh) = ϕ(g) ϕ(h) = ψ(Kg) ψ(Kh).
ψ ist surjektiv:
Sei g 0 ∈ im ϕ beliebig. Dann existiert ein g ∈ G mit ϕ(g) = g 0 . Es folgt
ψ(Kg) = g 0 .
ψ ist injektiv:
2.3 Homomorphismen
69
1.5
ker ψ = {Kg : ψ(Kg) = e0 }
= {Kg : ϕ(g) = e0 }
= {Kg : g ∈ ker ϕ = K}
Nach Lemma 2.38 ist Kg = K für alle g ∈ K. Somit ist ker ψ = {K}. Da
die Nebenklasse K das neutrale Element der Gruppe G/K ist, folgt daraus
bereits die Injektivität von ψ.
2
Sei die Gruppe G gegeben. Wir fragen: Welche Gruppen G0 können wir als
Bild von G unter einem Homomorphismus erhalten? Wie sehen also die homomorphen Bilder der Gruppe G aus?
Sei G0 ein homomorphes Bild von G. Dann gibt es einen Epimorphismus
ϕ : G → G0 . Aus G0 = im ϕ und aus Satz 2.85 folgt
G0 = im ϕ ∼
= G/ ker ϕ.
Wegen ker ϕ E G ist G0 von der Form G/N mit dem Normalteiler N = ker ϕ.
Die homomorphen Bilder von G haben also alle die Form
urf
G/N,
wobei N ein Normalteiler von G ist.
Wir fassen diese Erkenntnis zu einer Bemerkung zusammen:
Bemerkung 2.86 Jedes homomorphe Bild der Gruppe (G, ·) ist isomorph
zu einer Faktorgruppe G/N , wobei N ein geeigneter Normalteiler von G ist.
Kennen wir alle Normalteiler von G, dann kennen wir auch alle homomorphen
Bilder von G bis auf Isomorphie.
Ent
w
Satz 2.87 (Parallelogrammlemma)
Sei ϕ ein Epimorphismus von G nach G0 . Dann existiert eine umkehrbar
eindeutige Zuordnung zwischen den Untergruppen von G0 und denen von
G, welche ker ϕ enthalten. Ebenso existiert eine umkehrbar eindeutige Zuordnung zwischen den Normalteilern von G0 und denen von G, welche ker ϕ
enthalten, siehe Abbildung 2.1.
Beweis. Sei H eine Untergruppe von G und sei ker ϕ ⊆ H. Dann ist H 0 =
ϕ(H) eine Untergruppe der Gruppe G0 = ϕ(G), wie man leicht nachrechnet.
Die Behauptung für Normalteiler
H E G
⇒
H 0 = ϕ(H) E G0
ist ähnlich einfach zu beweisen.
Sei umgekehrt H 0 ≤ G0 . Wir setzen H = ϕ−1 (H 0 ). Dann gilt ker ϕ ⊆ H und
H ≤ G. Ist nun H 0 E G0 , dann folgt daraus H E G.
2 Gruppen
PSfrag replacements
ϕ
G0
≤
G
≤
H
1.5
70
≤
H0
≤
≤
ker ϕ
{e0 }
{e}
Abbildung 2.1. Parallelogrammlemma
Offensichtlich gilt auch H1 ⊆ H2
⇔
H1 0 ⊆ H 2 0 .
2
urf
Frage 2.88 Wir fragen uns: Welche Gruppen gibt es überhaupt (bis auf
Isomorphie)?
Satz 2.89 Sei G eine endliche, abelsche Gruppe und m ∈ N mit m |G|,
dann gibt es eine Untergruppe H von G mit |H| = m.
Beweis. Dieser Satz folgt aus dem Hauptsatz über endliche abelsche Gruppen, siehe Satz 2.104.
2
Bemerkung 2.90 Für nichtabelsche Gruppen ist dieser Satz falsch. Ein Gegenbeispiel ist die alternierende Gruppe A4 . Die Ordnung dieser Untergruppe
der symmetrischen Gruppe S4 ist 12, sie besitzt jedoch keine Untergruppe
der Ordnung 6.
Ent
w
Jedoch gilt für eine beliebige Gruppe G: Zu jeder Primzahlpotenz pk , die
|G| teilt, gibt es stets eine Untergruppe dieser Ordnung. Das Stichwort heißt
“Sylow-Sätze”. Wir verzichten auf die genauere Diskussion dieser Resultate.
Lemma 2.91 Sei I eine endliche oder abzählbar unendliche Indexmenge,
I = {1, 2, . . . }, für alle i ∈ I sei Gi eine Gruppe mit neutralem Element ei
und sei
G = G1 × G2 × . . . = (. . . , gi , . . . ) : gi ∈ Gi , i ∈ I
das kartesische Produkt der Mengen Gi . Sei weiters
M
Gi =
i∈I
(. . . , gi , . . . ) : gi = ei , mit Ausnahme höchstens endlich vieler i ∈ I .
Für g = (. . . , gi , . . . ) und h = (. . . , hi , . . . ) aus G definieren wir
2.3 Homomorphismen
71
g ◦ h = (. . . , gi hi , . . . ).
1.5
Dann gilt:
1. (G, ◦) ist eine Gruppe.
L
2.
i∈I Gi E G
3. Es gilt folgende Beziehung für die Kommutativität:
!
M
Gi , ◦ ist abelsch.
(G, ◦) ist abelsch. ⇔
i∈I
⇔
∀i∈I:
Gi ist abelsch.
4. Wenn die Indexmenge I endlich ist, gilt
M
Gi = G.
i∈I
2
urf
Beweis. Der Beweis ist einfach, langweilig und wird daher ausgelassen.
Wir merken an, dass diese Definitionen für eine beliebige Indexmenge I einen
Sinn machen. Da wir diese Allgemeinheit im Folgenden nicht benötigen, verzichten wir auf dieses abstrakte Konzept.
Definition 2.92 (Direktes Produkt, direkte Summe)
Die Gruppe (G, ◦) heißt das direkte Produkt der Gruppen Gi und wird mit
Y
Gi
i∈I
bezeichnet.
L
i∈I
Gi , ◦ heißt die (äußere) direkte Summe der Gruppen
Ent
w
Die Gruppe
Gi .
Bemerkung 2.93 Wenn I = {1, . . . , n} eine endlich Indexmenge ist, so
schreiben wir
Qn
• an Stelle von i=1 Gi häufig G1 × · · · × Gn ,
Ln
• an Stelle von i=1 Gi häufig G1 ⊕ · · · ⊕ Gn ,
• falls zusätzlich G1 = G2 = · · · = Gn = G gilt, an Stelle von
n
Y
Gi
stets
Gn .
i=1
Satz 2.94 Alle zyklischen Gruppen sind bis auf Isomorphie gegeben durch
(Z, +) und (Zn , +), n ∈ N, n ≥ 2.
72
2 Gruppen
Beweis. Sei (G, ·) zyklisch mit erzeugendem Element g, das heißt G = hgi.
1.5
Falls G endlich ist, sei n = |G| = |hgi|. Dann gilt
G = e, g, g 2 , . . . , g n−1 .
Sei ϕ : G → Zn mit ϕ(g k ) = k. Dann ist ϕ ein Isomorphismus und es folgt
(G, ·) ∼
= (Zn , +) .
Falls G unendlich ist,
G = gk : k ∈ Z ,
so definieren wir ϕ : G → Z, ϕ(g k ) = k. Dann ist ϕ ein Isomorphismus und
es folgt (G, ·) ∼
2
= (Z, +) .
Korollar 2.95
1. Jede zyklische Gruppe ist abelsch.
urf
2. Jede zyklische Gruppe ist entweder endlich oder abzählbar.
3. Jede zyklische Gruppe ist homomorphes Bild von (Z, +).
4. Jede Gruppe mit Primzahlordnung p ist zyklisch und somit zu (Zp , +)
isomorph.
Lemma 2.96 Es gilt:
1. Jede Untergruppe einer zyklischen Gruppe ist zyklisch.
2. Das homomorphe Bild einer zyklischen Gruppe ist zyklisch.
Beweis. Sei (G, ·) eine zyklische Gruppe, G = hgi.
Ent
w
Zu 1.
Sei H ≤ G. Wenn H = {e}, dann ist die Behauptung trivial. Sei nun H 6= {e}
und sei
k = min {n ∈ N : g n ∈ H} .
Dann behaupten wir, dass H = g k . Die Aussage g k ⊆ H ist trivial. Sei
umgekehrt g m ∈ H, beliebig. Nach dem Satz von der Division mit Rest gibt
es q, r ∈ Z mit m = q · k + r, 0 ≤ r < k. Somit gilt
q
g m = g k g r ∈ H ⇒ g r ∈ H.
|{z}
∈H
Da k ∈ N minimal ist und r < k gilt, muss r = 0 sein. Daraus folgt, dass
g m ∈ hg k i. Dies impliziert
H ⊆ hg k i.
2.3 Homomorphismen
73
1.5
Zu 2.
Sei ϕ : G → G0 ein Gruppenhomomorphismus. Wir müssen zeigen, dass
die Gruppe im ϕ zyklisch ist:
n
o
n
o
k
im ϕ = ϕ g k : k ∈ Z = ϕ (g) : k ∈ Z = ϕ(g)
2
Satz 2.97 Die einfachen abelschen Gruppen sind bis auf Isomorphie genau
die Gruppen (Zp , +) mit p prim.
Beweis. Sei (G, ·) eine einfache abelsche Gruppe (siehe Definiton 2.58). Dann
ist G notwendigerweise endlich. Dies zeigen wir durch einen indirekten Beweis.
Angenommen |G| = ∞. Wir wählen ein beliebiges g ∈ G wobei g 6= e.
urf
Falls ordG (g) < ∞:
Die von g erzeugte Untergruppe hgi ist endlich. Da G abelsch ist, ist hgi ein
Normalteiler von G. Wegen g 6= e enthält hgi außer e noch weitere Elemente.
Daher gilt {e} 6= hgi. Da G unendlich ist und hgi endlich, gilt G 6= hgi. Daher
ist hgi ein eigentlicher Normalteiler von G. Das ist aber ein Widerspruch zur
Annahme, dass G einfach ist.
Falls ordG (g) = ∞:
Die von g 2 erzeugte Untergruppe hg 2 i ist ein Normalteiler von G, da G abelsch
ist. Neben dem Element e ist zumindest das Element g 2 in hg 2 i enthalten.
Dieses ist ungleich e, denn g 2 = e wäre ein Widerspruch zu ordG (g) = ∞.
Daher gilt {e} 6= hgi. Das Element g ist nicht in hg 2 i enthalten, denn sonst
gäbe es ein t ∈ N mit
g 2t = g
⇒
g 2t−1 = e,
Ent
w
was einen Widerspruch zu ordG (g) = ∞ darstellt. Daher gilt auch hgi 6= G.
Somit ist hg 2 i ein eigentlicher Normalteiler von G. Das ist ein Widerspruch
zur Annahme, dass (G, ·) einfach ist. Wir haben auf diese Weise gesehen,
dass die Annahme |G| = ∞ stets auf einen Widerspruch führt. G muss daher
endlich sein.
Wir zeigen, dass |G| prim ist.
Wäre n := |G| eine zusammengesetzte Zahl, so gäbe es einen Primteiler p
von n, p < n. Nach Satz 2.89 gibt es dann eine Untergruppe H mit |H| = p.
Da G abelsch ist folgt weiters H E G. Wegen 1 < |H| = p < n muss H
also ein eigentlicher Normalteiler von G sein. Dies ist ein Widerspruch zur
Einfachheit von G.
Wir zeigen: G ∼
= Zp .
Da |G| = p prim ist, ist G zyklisch. Nach Korollar 2.95 gilt dann
74
2 Gruppen
G = e, g, g 2 , . . . , g p−1
∼
=
Zp = 0, 1, 2, . . . , p − 1 .
2
1.5
Wir wissen bereits, dass Zp einfach ist. Damit ist der Satz bewiesen.
Lemma 2.98 Zn × Zm ist zyklisch genau dann, wenn die beiden Zahlen n
und m teilerfremd sind.
Beweis.
⇒:
Sei Zn × Zm zyklisch mit erzeugendem Element a, b . Wir wissen:
|Zn | = n
|Zm | = m
⇒
⇒
na = 0
mb = 0
∀ a ∈ Zn ,
∀ a ∈ Zm .
Dabei ist zu beachten, dass wir es hier mit additiven Gruppen zu tun haben.
Wäre (n, m) > 1, dann wäre [n, m] < n · m, wobei [n, m] das kleinste
gemeinsame Vielfache von n und m bezeichnet.
urf
Wegen n | [n, m], m | [n, m] gilt
[n, m] (a, b) = (0, 0)
∀ (a, b) ∈ Zn × Zm .
Als Konsequenz wäre die Ordnung von (a, b) ≤ [n, m]. Daraus folgt
|Zn × Zm | = (a, b) ≤ [n, m]
⇒
|Zn × Zm | < n · m.
Das ist aber ein Widerspruch zu |Zn × Zm | = n · m. Unsere Annahme war
also falsch. Es folgt (n, m) = 1.
Ent
w
⇐:
Sei (n, m) = 1. Sei a ein erzeugendes Element von Zn und b ein erzeugendes
Element von Zm . Welche Ordnung hat das Element a, b in Zn × Zm ?
Sei k = ordZn ×Zm a, b . Dann gilt k ≤ n · m und weiters folgt
k a, b = k a, k b = 0, 0
⇒
ka = 0
kb = 0
⇒
n = ordZn (a) k
m = ordZm b k
Wegen (n, m) = 1 folgt daraus n · m | k und daher n · m ≤ k. Damit gilt
ordZn ×Zm a, b = n · m,
die Gruppe Zn × Zm ist somit zyklisch.
2
2.3 Homomorphismen
75
0 ≤ r < n.
k = qn + r,
Beispiel 2.100
1. Z2 × Z2 ist nicht zyklisch.
2. Z2 × Z3 ist zyklisch.
3. Z22 × Z3 ist zyklisch.
Satz 2.101
Zn × Z m ∼
= Znm
1.5
Bemerkung 2.99 Wir haben die folgende Überlegung verwendet: Sei n =
ordG (g). Wenn g k = e und k 6= 0, dann gilt n | k. Dies folgt aus dem Satz von
der Division mit Rest:
⇔
(n, m) = 1
Beweis. Sei Zn × Zm ∼
= Znm .
Dann muss Zn × Zm zyklisch sein. Daraus folgt wegen Lemma 2.98, dass
(n, m) = 1 ist.
urf
Sei (n, m) = 1.
Dann folgt: Zn × Zm ist eine zyklische Gruppe mit n · m Elementen. Wegen
Satz 2.94 gilt dann Zn × Zm ∼
2
= Znm .
Definition 2.102 (Partition)
Sei n ∈ N. Unter einer Partition von n verstehen wir eine endliche Folge
a1 , a2 , . . . , as natürlicher Zahlen ai mit den beiden Eigenschaften
(P1)
(P2)
a 1 ≥ a2 ≥ · · · ≥ a s
a 1 + a2 + · · · + a s = n
Mit P (n) bezeichnen wir die Anzahl der verschiedenen Partitionen von n.
Ent
w
Beispiel 2.103
Partitionen zu n = 1.
Es gibt nur eine Möglichkeit, deshalb ist P (1) = 1:
1 = 1
Partitionen zu n = 2.
Es gibt zwei Möglichkeiten der Darstellung, deshalb ist P (2) = 2:
2 = 1+1
= 2
Partitionen zu n = 3.
Es gibt 3 Möglichkeiten der Darstellung, daher gilt P (3) = 3:
76
2 Gruppen
1.5
3 = 1+1+1
= 2+1
= 3
Partitionen zu n = 4.
Es gibt 5 Möglichkeiten der Darstellung, somit gilt P (4) = 5:
4 = 1+1+1+1
= 2+1+1
= 2+2
= 3+1
= 4
Partitionen zu n = 5:
Es gibt 7 Möglichkeiten der Darstellung, deswegen gilt P (5) = 7:
= 2+2+1
= 3+1+1
= 3+2
= 4+1
= 5
urf
5 = 1+1+1+1+1
= 2+1+1+1
Satz 2.104 (Hauptsatz über endliche abelsche Gruppen)
Wir erhalten bis auf Isomorphie alle abelschen Gruppen der Ordnung n auf
folgende Weise:
1. Wir zerlegen n in Primfaktoren:
Ent
w
n = p 1 α1 p 2 α2 · · · p r αr
αi ∈ N, pi prim
2. Für jeden Primfaktor pi αi wählen wir eine Partition von αi :
αi = a 1 + a 2 + · · · + a s ,
und bilden das direkte Produkt
Z p i a1 × Z p i a2 × · · · × Z p i as .
3. Wir bilden nun das direkte Produkt der r Gruppen vom 2. Schritt.
Alle so erhaltenen Gruppen sind paarweise nicht isomorph.
2.3 Homomorphismen
Beweis. Der Beweis entfällt.
77
1.5
2
Korollar 2.105 Jede endliche abelsche Gruppe ist also ein direktes Produkt
zyklischer Gruppen der Form (Zpα , +), p prim, α ∈ N .
Beispiel 2.106 Wir bestimmen alle abelschen Gruppen der Ordnung n =
1001.
1. Schritt: Primfaktorzerlegung
1001 = 7 · 11 · 13
2. Schritt: Partitionen
1=1
3. Schritt: Direktes Produkt
Z7 × Z11 × Z13
urf
Es gibt also nur eine abelsche Gruppe der Ordnung 1001 (bis auf Isomorphie).
Beispiel 2.107 Wir bestimmen alle abelschen Gruppen der Ordnung n =
40.
1. Schritt: Primzahlzerlegung
40 = 23 · 51
2. Schritt: Partitionen zu 3 (zu 1 gibt es nur die triviale Partition)
3 = 1+1+1
Z 2 × Z2 × Z2
Z 4 × Z2
Z8
Ent
w
= 2+1
= 3
3. Schritt: Direkte Produkte
3 = 1+1+1
= 2+1
= 3
1=1
1=1
1=1
Z 2 × Z2 × Z2 × Z5
Z 4 × Z2 × Z5
Z 8 × Z5
Es gibt also drei nichtisomorphe abelsche Gruppen der Ordnung 40. Wir
können diese Produkte noch zusammen fassen:
Z2 × Z 2 × Z 2 × Z 5
Z4 × Z 2 × Z 5
Z8 × Z 5
∼
= Z2 × Z2 × Z10
∼
= Z4 × Z10
∼
= Z40
78
2 Gruppen
1.5
Bemerkung 2.108 Ein derartig schönes und einfaches Resultat lässt sich
auch noch für endlich erzeugte abelsche Gruppen zeigen, der sogenannte
Hauptsatz über endlich erzeugte abelsche Gruppen: für jede endlich erzeugte
abelsche Gruppe (G, ·) gilt:
G ∼
= Z p 1 α1 × · · · × Z p r αr × Z s
Ent
w
urf
mit eindeutig bestimmten Zahlen r, pi , αi und s.
1.5
3 Ringe, Schiefkörper und Körper
Inhalt
Die Begriffe Ring, Körper und Polynom sind grundlegende Konzepte der
modernen Algebra. Sie treten in vielen anderen mathematischen Disziplinen
auf, aber auch in Gebieten wie der theoretischen und praktischen Informatik
(Stichwort: Kryptographie).
urf
Ziel
Wir lernen zentrale Konzepte der Algebra kennen, die auch für bestimmte
Anwendungen wichtig sind.
Stichwörter
Die Stichwörter zu diesem Kapitel lauten
• Ring
• irreduzible Elemente und Primelemente
• ZPE-Ringe
• Körper
• Polynomringe
Literatur
Ent
w
R. Lidl und G. Pilz. Angewandte abstrakte Algebra I. Bibliographisches
Institut, Mannheim, 1982. (Vergriffen)
R. Lidl and G. Pilz. Applied Abstract Algebra. 2nd Edition. Springer Verlag,
Berlin 1998.
80
3 Ringe, Schiefkörper und Körper
1.5
3.1 Definitionen
Wir betrachten nun Mengen R mit zwei inneren Verknüpfungen.
Beispiel 3.1 Für das Rechnen mit ganzen Zahlen gilt:
(R1) (Z, +) ist eine kommutative Gruppe.
(R2) (Z, ·) ist eine Halbgruppe (d.h. (G1) und (G2) gelten).
(R3) Es gilt das Distributivgesetz,
a · (b + c) = a · b + a · c
∀ a, b, c ∈ Z.
urf
Weiters existiert bezüglich der Multiplikation ein neutrales Element in Z,
nämlich die ganze Zahl 1. Außerdem kann es uns nie passieren, dass für eine
ganze Zahl a 6= 0 die Summe na = a + a + · · · + a (n Summanden, n ∈ N)
gleich Null ist.
Beispiel 3.2 Wenn wir die Menge Zm = 0, 1, . . . , m − 1 der Restklassen
modulo m betrachten (m ∈ Z, m ≥ 2), dann gilt für das Rechnen mit diesen
Objekten:
(R1) (Zm , +) ist eine kommutative Gruppe.
(R2) (Zm , ·) ist eine Halbgruppe (d.h. (G1) und (G2) gelten).
(R3) Es gilt das Distributivgesetz,
a · (b + c) = a · b + a · c
∀ a, b, c ∈ Zm .
Weiters existiert bezüglich der Multiplikation ein neutrales Element in Zm ,
nämlich die Restklasse 1. Außerdem gilt, dass für jedes Element a von Zm
die Summe ma = a + a + · · · + a gleich Null ist.
Ent
w
Beispiel 3.3 Sei M eine beliebige nichtleere Menge und sei P(M ) die Potenzmenge von M , also die Menge aller Teilmengen von M . Wir definieren
auf P(M ) zwei Verknüpfungen:
A + B = (A \ B) ∪ (B \ A),
A · B = A ∩ B,
A, B ∈ P(M ). Dann gilt
(R1) (P(M ), +) ist eine kommutative Gruppe.
(R2) (P(M ), ·) ist eine Halbgruppe (d.h. (G1) und (G2) gelten).
(R3) Es gilt das Distributivgesetz,
A · (B + C) = A · B + A · C
∀ A, B, C ∈ P(M ).
3.1 Definitionen
81
1.5
Weiters existiert bezüglich der Multiplikation ein neutrales Element in P(M ),
nämlich die Menge M . Außerdem gilt, dass für jedes Element A von P(M )
die Summe 2A = A + A gleich Null ist.
Derartige Beispiele von Mengen mit zwei inneren Verknüpfungen führen uns
zu der folgenden Definition.
Definition 3.4 (Ring, Nullelement, Charakteristik eines Ringes)
Unter einem Ring verstehen wir ein Tripel (R, +, ·) mit den Eigenschaften:
(R1) (R, +) ist eine abelsche Gruppe.
(R2) (R, ·) ist eine Halbgruppe, d.h. die innere Verknüpfung · ist assoziativ.
(R3) Es gelten das linke Distributivgesetz
a · (b + c) = a · b + a · c
und das rechte Distributivgesetz
(a + b) · c = a · c + b · c,
urf
für beliebige a, b, c ∈ R.
Ein Ring (R, +, ·) heißt kommutativ, wenn die innere Verknüpfung · kommutativ ist.
Das neutrale Element der additiven Gruppe (R, +) wird das Nullelement des
Rings genannt und mit 0 bezeichnet.
Unter der Charakteristik eines Ringes (R, +, ·) versteht man die kleinste
natürliche Zahl n mit der Eigenschaft
n · a = a + a + ··· + a = 0
|
{z
}
n mal
Ent
w
für alle a ∈ R. Sie wird mit char R bezeichnet. Wenn keine solche natürliche
Zahl existiert, definiert man char R = 0.
In der Anlehnung an die Prototypen eines Ringes, nämlich (Z, +, ·) und
(Zm , +, ·), sind folgende Bezeichnungen üblich.
Definition 3.5 (Einselement, R∗ )
Sei (R, +, ·) ein Ring. Falls die Halbgruppe (R, ·) ein neutrales Element
besitzt, so wird dies das Einselement des Rings (R, +, ·) genannt und mit 1
bezeichnet.
Unter einem Ring mit Einselement verstehen wir einen Ring (R, +, ·), in dem
ein neutrales Element bezüglich · existiert.
Die Menge R\{0} der Ringelemente ungleich dem Nullelement wird mit R ∗
bezeichnet.
82
3 Ringe, Schiefkörper und Körper
Beispiel 3.6
1.5
1. Der Ring (Z, +, ·) ist der Prototyp eines Ringes. Es gilt char Z = 0.
2. (h2i, +, ·) ist ein kommutativer Ring ohne Einselement, h2i = {2k : k ∈
Z} ⊆ Z. Auch dieser Ring hat die Charakteristik 0.
3. Sei R = C([−1, 1]) = {f : [−1, 1] → R stetig } und sei auf diese Menge
Addition und Multiplikation wie folgt definiert:
f +g :
(f + g)(x) = f (x) + g(x)
f ·g :
(f · g)(x) = f (x) · g(x)
∀ x ∈ [−1, 1]
∀ x ∈ [−1, 1].
Dann ist (R, +, ·) ein kommutativer Ring mit Einselement.
Seien die Funktionen f, g : [−1, 1] → R definiert als
f (x) = max{0, x},
g(x) = max{0, −x}.
urf
Die beiden Funktionen f und g sind stetig, daher liegen sie in R. Weiters
sind sie ungleich der Nullfunktion 0, die das Nullelement des Rings R ist.
Jedoch gilt
f · g = 0.
4. Sei (R, +, ·) = (Zm , +, ·), mit m ≥ 2 ganz. Diesen Ring nennen wir den
Restklassenring modulo m. Er hat die Charakteristik m, siehe Satz 3.15.
Wenn wir speziell (Z6 , +, ·) betrachten, Z6 = {0, 1, 2, 3, 4, 5}, so gilt
2 6= 0 und 3 6= 0, jedoch für das Produkt folgt
2 · 3 = 6 = 0.
Lemma 3.7 Sei (R, +, ·) ein Ring und seien r, s, t ∈ R, beliebig. Dann gilt:
Ent
w
1. 0 · r = r · 0 = 0
2. r · (−s) = (−r) · s = −(r · s)
3. (−r) · (−s) = r · s
Beweis.
Zu 1. Es gilt die Beziehung
0 · r = (0 + 0) · r = 0 · r + 0 · r
Wir addieren auf beiden Seiten −(0·r) und erhalten 0 = 0·r. Die Behauptung
r · 0 = 0 wird analog bewiesen.
Zu 2. Es gilt die Beziehung
3.1 Definitionen
83
0 = r · 0 = r · (s − s) = r · s + r · (−s)
1.5
Wir addieren auf beiden Seiten −(r · s) und erhalten
−(r · s) = r · (−s).
Zu 3. Wegen 2. gilt
(−r) · (−s) = −((−r) · s) = (−(−r)) · s = r · s.
2
Definition 3.8 (Nullteiler, Integritätsbereich)
Unter einem Nullteiler eines Ringes (R, +, ·) versteht man ein Element a 6= 0
mit der Eigenschaft ∃ b 6= 0 sodass a · b = 0. Der Ring (R, +, ·) heißt
nullteilerfrei, wenn R keine solchen Elemente besitzt.
Unter einem Integritätsbereich verstehen wir einen kommutativen, nullteilerfreien Ring mit Einselement.
Beispiel 3.9
urf
Achtung! In manchen Büchern sind Integritätsbereiche als kommutative nullteilerfreie Ringe definiert. Die Existenz eines Einselements wird dabei nicht
vorausgesetzt.
1. (Z, +, ·) ist ein Integritätsbereich.
2. Sei
R=
a11 a12
a21 a22
:
aij ∈ C
mit der Matrizenaddition für + und der Matrizenmultiplikation für · gegeben. Dann ist (R, +, ·) ein nichtkommutativer Ring mit Nullteilern
und mit Einselement.
Ent
w
3. (Z6 , +, ·) ist ein kommutativer Ring mit Einselement, aber mit Nullteilern.
4. Wenn p prim ist, dann ist (Zp , +, ·) ein Integritätsbereich (siehe dazu
auch Satz 3.15). Die Nullteilerfreiheit ist leicht nachgewiesen. Denn angenommen a · b = 0, dann müsste p | a · b gelten. Da p prim ist, folgt p|a
oder p|b. Daher gilt a = 0 oder b = 0.
Lemma 3.10 Der Ring (R, +, ·) ist nullteilerfrei genau dann, wenn die beiden Bedingungen
a · b = a · c,
b · a = c · a,
a 6= 0
a 6= 0
⇒
⇒
b=c
b=c
erfüllt sind, also genau dann, wenn wir in R kürzen können.
84
3 Ringe, Schiefkörper und Körper
Der Fall b · a = c · a wird analog bewiesen.
1.5
Beweis. Sei (R, +, ·) nullteilerfrei und sei a · b = a · c. Dann folgt aus dem
Distributivgesetz a · (b − c) = 0. Nun ist a 6= 0. Wegen der Nullteilerfreiheit
folgt, dass b − c = 0 sein muss. Wir erhalten b = c.
Seien umgekehrt die beiden Kürzungsbedingungen des Lemmas erfüllt. Sei
a · b = 0 und sei a 6= 0. Dann gilt die Beziehung a · b = 0 = a · 0. Wir kürzen
nun durch a, das ja ungleich 0 ist, und erhalten b = 0. Im Falle, dass b 6= 0
vorausgesetzt wird, kürzen wir von rechts durch b und erhalten a = 0.
2
Definition 3.11 (Schiefkörper, Körper)
Ein Ring (R, +, ·) heißt Schiefkörper (oder Divisionsring), wenn (R∗ , ·) eine
Gruppe ist.
Kommutative Schiefkörper werden Körper genannt.
Satz 3.12
1. Jeder Schiefkörper –und damit jeder Körper– ist nullteilerfrei.
urf
2. (Satz von Wedderburn)
Jeder endliche Schiefkörper ist ein Körper.
3. Jeder endliche Integritätsbereich ist ein Körper.
4. Die Charakteristik eines Integritätsbereiches ist entweder 0 oder eine
Primzahl.
Ent
w
Beweis.
Zu 1.
Seien a, b, c ∈ R, sei a 6= 0 und sei weiters a · b = a · c. Da R ein Schiefkörper
ist, gibt es ein Inverses a−1 zu a in R. Wir multiplizieren von links mit a−1
und erhalten b = c. Wir können also von links kürzen. Analog zeigen wir, dass
wir auch rechts kürzen können. Aus Lemma 3.10 folgt die Nullteilerfreiheit
von R.
Zu 2.
Ohne Beweis.
Zu 3.
Es ist nur mehr die Existenz des Inversen zu zeigen. Sei dazu a ∈ R ∗ , beliebig.
Dann gilt trivialerweise aR = {a · r : r ∈ R} ⊆ R. Sei nun a · r = a · s. Dann
gilt wegen Lemma 3.10, dass r = s. Damit enthalten die Mengen aR und R
gleich viele Elemente. Es folgt aR = R. Es muss also ein r ∈ R geben, mit
a · r = 1. Das Element r ist dann das gesuchte multiplikative Inverse zu a.
Zu 4.
Sei R ein Integritätsbereich. Wenn char R = 0 gilt, dann ist nichts zu zeigen.
Sei n = char R ∈ N. Wir nehmen an, dass n zusammengesetzt ist, n = n0 · n00
3.1 Definitionen
85
1.5
mit 1 < n0 , n00 < n. Dann ist n0 · 1 6= 0, denn wäre n0 · 1 = 0, dann wäre
n0 · a = 0 für jedes a ∈ R. Das ist aber unmöglich, da n die kleinste Zahl
ist, die diese Eigenschaft besitzt. Dasselbe gilt für n00 : n00 · 1 6= 0. Da wir
vorausgesetzt haben, dass R ein Integritätsbereich ist, es also keine Nullteiler
gibt, erhalten wir
(n0 · 1)(n00 · 1) = n · 1 6= 0.
Dies ist aber ein Widerspruch dazu, dass n die Charakteristik von R ist. 2
Beispiel 3.13 Die Addition zweier komplexer Zahlen a + ib und a0 + ib0 ,
a, b, a0 , b0 ∈ R, ist einfach,
(a + ib) + (a0 + ib0 ) = (a + a0 ) + i(b + b0 ).
Bei der Multiplikation können wir die beiden Ausdrücke a + ib und a0 + ib0
wie reelle Zahlen miteinander multiplizieren, sofern wir beachten, dass für
das “Symbol” i die Regel i2 = −1 gilt:
(a + ib) · (a0 + ib0 ) = (aa0 − bb0 ) + i(ba0 + ab0 ).
urf
Somit bildet R = {a + ib : a, b ∈ R, i2 = −1} einen Körper, eben den Körper
der komplexen Zahlen. Sonst schreiben wir dafür natürlich immer C. Gibt
es nun einen Erweiterungskörper von C, in dem Addition und Multiplikation so definiert werden können, dass für die Elemente von C die gewohnten
Verknüpfungen gelten?
Dazu überlegen wir Folgendes. Wir können C mit R2 identifizieren. Jeder
komplexen Zahl a + ib, wobei a, b ∈ R, entspricht umkehrbar eindeutig das
Paar (a, b) reeller Zahlen. Wir übertragen nun die Addition und die Multiplikation, die wir in C betrachtet haben, auf R2 :
(a, b) + (a0 , b0 ) = (a + a0 , b + b0 ),
(a, b) · (a0 , b0 ) = (aa0 − bb0 , ba0 + ab0 ).
Ent
w
Dann gilt also, dass (R2 , +, ·) ein Körper ist. Wir fragen nun: wie müssen
wir auf R3 eine Addition und eine Multiplikation definieren, dass für die
Elemente von R3 der Gestalt (a, b, 0) –sie entsprechen den Elementen von R2 –
die “neuen” Operationen genau die “alten”, oben definierten Verknüpfungen
ergeben? Interessanterweise ist dieser Versuch hoffnungslos, man kann zeigen,
dass wir R3 auf diese Weise nicht zu einem Körper machen können. Die
Definition der Addition ist nicht das Problem,
(a, b, c) + (a0 , b0 , c0 ) = (a + a0 , b + b0 , c + c0 )
ist die geeignete Erweiterung von R2 auf den Fall des R3 . Es gibt aber keine
passende Definition der Multiplikation, wie man beweisen kann.
Ein gewisser Lord William R. Hamilton hat hier nicht aufgegeben und es
mit R4 probiert. Hamilton versuchte, den Körper der komplexen Zahlen zu
86
3 Ringe, Schiefkörper und Körper
·
i
j
k
i
-1
-k
j
j
k
-1
-i
k
-j
i
-1
1.5
einem größeren Körper von “hyperkomplexen” Zahlen zu erweitern. Er hat
dazu die Menge R = {a + ib + jc + kd : a, b, c, d ∈ R} betrachtet, mit den
folgenden Vereinbarungen für das Rechnen mit den Symbolen i, j und k:
Tabelle 3.1. Die Festlegungen von Hamilton
Wir addieren die Elemente von R wie komplexe Zahlen. Die Multiplikation wird nach den obigen Regeln ausgeführt. Man rechnet dann leicht nach:
(R, +, ·) ist zwar kein Körper, aber ein Schiefkörper. Man kann sogar zeigen, dass man es nicht besser machen kann als Hamilton und mit diesem
Schiefkörper zufrieden sein muss, wenn man C auf diese Weise erweitern will.
urf
Wenn wir die Elemente von R als Elemente von R4 schreiben, dann erhalten
wir die folgenden innere Verknüpfungen:
(a, b, c, d) + (a0 , b0 , c0 , d0 ) = (a + a0 , b + b0 , c + c0 , d + d0 )
(a, b, c, d) · (a0 , b0 , c0 , d0 ) = (aa0 − bb0 − cc0 − dd0 , ba0 + ab0 − dc0 + cd0 ,
ca0 + db0 + ac0 − bd0 , da0 − cb0 + bc0 + ad0 ).
Die Verallgemeinerung der Verknüpfungen von R2 auf R4 ist damit offensichtlich, ebenso überzeugt man sich leicht vom Verlust der Kommutativität.
Ein empfehlenswertes Buch zu diesem Thema ist Ebbinghaus, H.-D. et al.:
“Zahlen”, 3. Auflage, Springer-Verlag 1992. Über den Link
http://www.maths.tcd.ie/pub/HistMath/People/Hamilton/Quaternions.html
erhalten Sie weitere, auch historisch interessante Informationen.
Ent
w
Definition 3.14 (Quaternionen)
Der Schiefkörper in Beispiel 3.13 heißt der Schiefkörper der Quaternionen.
Satz 3.15 Für alle m ∈ N mit m ≥ 2 sind folgende Aussagen äquivalent.
1. (Zm , +, ·) ist ein Integritätsbereich.
2. (Zm , +, ·) ist ein Körper.
3. m ist prim.
Beweis. (1) ⇒ (2) folgt aus Satz 3.12(3).
(2) ⇒ (3)
Für alle a ∈ Zm gilt m · a = ma = 0. Deshalb muss char Zm ≤ m sein.
3.1 Definitionen
87
Sei n = char Zm , dann gilt im Speziellen
⇒
⇒
n=0
1.5
n1 = 0
m | n.
Also muss auch m ≤ char Zm sein, woraus schliesslich char Zm = m folgt.
Nach Satz 3.12(4) ist m prim.
(3) ⇒ (1)
Wir müssen zeigen dass (Zm , +, ·) ein Integritätsbereich ist, falls m prim
ist, dass also keine Nullteiler in Zm enthalten sind. Dies haben wir bereits in
Beispiel 3.9 überlegt.
2
Schreibweise: S ≤ R
urf
Definition 3.16 (Unterring, Teilring)
Sei (R, +, ·) ein Ring und sei S eine nichtleere Teilmenge von R. Wenn
(S, +, ·) ein Ring ist, dann heißt (S, +, ·) ein Unterring (oder: Teilring) von
(R, +, ·).
Wenn zusätzlich S 6= R ist, dann heißt (S, +, ·) ein echter Unterring (echter
Teilring) von (R, +, ·).
Schreibweise: S < R
Lemma 3.17 Sei (R, +, ·) ein Ring und sei S eine nichtleere Teilmenge von
R. S ist genau dann ein Unterring von R, wenn die beiden Bedingungen
(UR1)
(UR2)
gelten.
∀ a, b ∈ S :
∀ a, b ∈ S :
a−b ∈ S
a·b ∈ S
Ent
w
Beweis. Zu zeigen ist nur, dass die Bedingungen (UR1) und (UR2) äquivalent
sind dazu, dass (S, +) eine abelsche Gruppe und (S, ·) eine Halbgruppe ist.
Dies ist leicht nachzuweisen. Die restlichen Ringeigenschaften sind für S automatisch erfüllt, da sie für alle Elemente von R gelten.
2
Beispiel 3.18
1. {0} und R sind die trivialen Unterringe von R.
2. Es gilt
2Z ≤ Z ≤ Q ≤ R ≤ C
mit der üblichen Addition und Multiplikation in der jeweiligen Zahlenmenge.
88
3 Ringe, Schiefkörper und Körper
1.5
Betrachten wir 2 Z ≤ Z, so sehen wir, dass ein Unterring eines Rings mit
Einselement kein Einselement enthalten muss.
Weiters ist Z ≤ Q ein Beispiel dafür, dass ein Unterring eines Körpers
kein Körper sein muss.
3. Sei N 6= ∅ eine Menge und M eine nichtleere Teilmenge von N . Sei
P(N ) = {A : A ⊆ N } die Potenzmenge von N und P(M ) die Potenzmenge zu M . Dann ist (P(N ), +, ·) ein kommutativer Ring mit Einselement, siehe Beispiel 3.3. Es gilt die Beziehung
P(M ) ≤ P(N ).
Definition 3.19 (Vielfaches, Teiler, Assoziiertheit, Irreduzibilität)
Sei (R, +, ·) ein Integritätsbereich und seien a, b ∈ R. Wir sagen, b teilt a,
wenn
∃ c ∈ R : a = b · c.
Wir nennen a ein Vielfaches von b und b einen Teiler von a, Schreibweise:
b | a.
urf
Ein Element a heißt eine Einheit von R, wenn a | 1.
Zwei Elemente a und b heißen assoziiert, wenn es eine Einheit gibt mit
a = b · ,
Schreibweise: a ∼ b.
Das Element b heißt ein echter Teiler von a, wenn b | a, weiters b keine Einheit
und auch nicht assoziiert zu a ist.
Das Element q ∈ R heißt irreduzibel, wenn q weder das Nullelement noch
eine Einheit von R ist und wenn weiters gilt, dass jedes Element b ∈ R, das
q teilt, eine Einheit oder assoziiert zu q ist.
Ent
w
Der Begriff des irreduziblen Elementes ist der Versuch, das Konzept der Primzahl in Integritätsbereichen zu definieren. Wir können diesen Begriff auch so
formulieren: ein irreduzibles Element q ist ein nichttriviales Ringelement (d.h.
q 6= 0, q - 1), das keine echten Teiler besitzt.
Beispiel 3.20 Wir untersuchen im Ring (R, +, ·) = (Z, +, ·) die oben definierten Begriffe.
• Die Einheiten von Z
Wenn für a ∈ Z gilt, dass a | 1, dann folgt a ∈ {1, −1}. Wegen der
Beziehungen 1 | 1 und −1 | 1 sind die Einheiten von Z genau die Elemente
1 und −1.
• Assoziierte Elemente
Wir benötigen dazu die soeben gefundenen Einheiten von Z. Wenn a ∼ b,
3.1 Definitionen
89
1.5
dann muss a = b · 1 = b oder a = b · (−1) = −b gelten. Das heißt, zu a sind
nur die Elemente a und −a assoziiert.
• Beispiele irreduzibler Elemente
Laut Definition ist a 6= 0, a - 1, ein irreduzibles Element genau dann, wenn
a keine echten Teiler besitzt. In Z bedeutet das, dass |a| keine echten Teiler
hat, also |a| eine Primzahl ist. Die Menge der irreduziblen Elemente in Z
ist daher die Menge
{±p : p prim} = {±2, ±3, ±5, ±7, . . .}.
Beispiel 3.21 (Die Gaußschen ganzen Zahlen)
Sei
Z[i] = {a + ib : a, b ∈ Z},
√
mit i = −1, die Menge der komplexen Zahlen z mit ganzzahligem Realund Imaginärteil. Wir übernehmen Addition und Multiplikation vom Körper
(C, +, ·). Für zwei Elemente a + ib, c + id ∈ Z[i] definieren wir daher
(a + ib) + (c + id) = (a + c) + i(b + d)
urf
(a + ib) · (c + id) = (ac − bd) + i(bc + ad)
Mit diesen beiden Operationen ist (Z[i], +, ·) ein kommutativer Ring mit
Einselement. Das Nullelement ist 0 + i0 = 0. Das Einselement ist 1 + i0 = 1.
Wir betrachten nun die Abbildung
N :
Z[i]
−→
2
N ∪ {0}
N (a + ib) = a + b2 .
Die Funktion N wird uns bei Teilbarkeitsuntersuchungen in Z[i] eine große
Hilfe sein. Aus der Beziehung
N (a + ib) = |a + ib|2 ,
Ent
w
wobei | . | den Betrag einer komplexen Zahl bezeichnet, ergeben sich folgende Eigenschaften der Funktion N (wobei (N3) eine einfache Folgerung aus
Eigenschaft (N1) ist):
(N1) N (a + ib) · (c + id) = N (a + ib) · N (c + id),
(N2)
N (a + ib) = 0 ⇔ a + ib = 0 .
(N3)
a + ib | c + id ⇒ N (a + ib) | N (c + id).
Tatsächlich ist (Z[i], +, ·) sogar ein Integritätsbereich. Um diese Behauptung
zu beweisen, müssen wir nur noch die Nullteilerfreiheit nachweisen. Sei dazu
(a + ib) · (c + id) = 0. Wegen (N1) gilt
N (a + ib) · (c + id) = N (a + ib) · N (c + id) = 0.
90
3 Ringe, Schiefkörper und Körper
1.5
Es muss somit N (a + ib) = 0 oder N (c + id) = 0 gelten, woraus wegen (N 2)
folgt, dass a + ib = 0 oder c + id = 0 ist. Es gibt also keine Nullteiler in Z[i].
Wir bestimmen nun die Einheiten von (Z[i], +, ·). Sei dazu a + ib | 1. Wir
wenden wieder die Funktion N an:
⇒
⇒
⇒
N (a + ib) | N (1) = 1
a2 + b 2 = 1
(a2 = 1 und b2 = 0)
oder
(a2 = 0 und b2 = 1)
a + ib ∈ {1, −1, i, −i}
Die Einheiten von Z[i] sind also 1, −1, i, −i.
Ein Beispiel für ein irreduzibles Element ist 1 + i, denn es besitzt nur die
trivialen Teiler. Sei dazu a + ib | 1 + i. Dann folgt
N (a + ib) = a2 + b2 N (1 + i) = 2
a2 + b2 = 1 oder a2 + b2 = 2
a + ib ∈ {1, −1, i, −i} oder a + ib ∈ {±1 ± i}.
urf
⇒
⇒
Die Elemente 1, −1, i, −i sind Einheiten, also keine echten Teiler von 1 + i.
Die restlichen Kandidaten scheiden aus, da sie zu 1 + i assoziiert sind:
−1 − i = (−1) · (1 + i)
1 − i = (−i) · (1 + i)
−1 + i = i · (1 + i)
⇒
⇒
⇒
1+i∼1+i
−1 − i ∼ 1 + i
1−i∼1+i
−1 + i ∼ 1 + i
Ent
w
Somit existieren keine echten Teiler von 1 + i, das Element 1 + i ist daher
irreduzibel.
Bemerkung 3.22 (Z, +, ·) ist ein Unterring von (Z[i], +, ·). 2 ist irreduzibel in Z, aber nicht mehr in Z[i], denn
2 = (1 + i)(1 − i).
Definition 3.23 (Größter gemeinsamer Teiler)
Sei (R, +, ·) ein Integritätsbereich und seien a, b ∈ R. Unter einem gemeinsamen Teiler von a und b verstehen wir ein Element e ∈ R mit
e|a
und
e | b.
Unter einem größten gemeinsamen Teiler von a und b verstehen wir ein Element d mit den Eigenschaften
d|a
d|b
e|a
e|b
und
⇒
Schreibweise: (a, b)
91
1.5
3.1 Definitionen
e | d.
Lemma 3.24 Sei (R, +, ·) ein Integritätsbereich und seien a, b ∈ R mit
a 6= 0 und b 6= 0. Dann gilt:
a|b
b|a
und
⇒
a ∼ b.
Beweis. Aus der Voraussetzung folgt, dass es c, d ∈ R gibt mit
b = a·c
a = b · d.
Wir setzen für b in der zweiten Zeile ein und erhalten
a = a·c·d
⇒
1 = c · d,
urf
daher gilt c | 1 und d | 1. Die Elemente c und d sind also Einheiten. Damit
sind a und b assoziierte Elemente.
2
Korollar 3.25 Sei (R, +, ·) ein Integritätsbereich und seien a, b ∈ R, nicht
beide gleich Null. Falls ein größter gemeinsamer Teiler (a, b) existiert, dann
ist er bis auf Multiplikation mit Einheiten eindeutig bestimmt.
Beispiel 3.26 Wir betrachten die Teilmenge der komplexen Zahlen
√
√ Z −5 = a + −5 b : a, b ∈ Z .
Ent
w
Wie im Fall von Z[i] übernehmen wir auch hier Addition
√ und Multiplikation von C. Es ist leicht nachzurechnen, dass Z −5 , +, · ein Inte√ √
gritätsbereich ist. Das Nullelement von Z −5 ist 0 + −5 · 0 = 0, das
√
Einselement ist 1 + −5 · 0 = 1. Wie im Fall Z[i] definieren wir eine geeignete
Normfunktion N ,
√ N : Z −5
→ N ∪ {0},
√
N (a + b −5) = a2 + 5 b2 .
Es gelten wiederum die Eigenschaften (N1), (N2) und (N3).
√ Die Einheiten von Z −5 :
√
√
a + −5 b 1 ⇒ N a + −5 b N (1) = 1
⇒
⇒
a2 = 1 und b2 = 0
√
a + −5 b ∈ {1, −1}
92
3 Ringe, Schiefkörper und Körper
Die Einheiten sind also 1 und −1.
⇒
⇒
1.5
Einige Beispiele irreduzibler
√ Elemente:
Die Elemente 2, 3, 1 + −5 sind irreduzibel. Wir zeigen diese Behauptung
für das Element 2, der Nachweis für die
√ anderen Elemente erfolgt analog.
Angenommen 2 hätte einen Teiler a + −5 b:
√
√
a + −5 b 2 ⇒ N a + −5 b = a2 + 5 b2 N (2) = 4.
a2 + 5 b2 ∈ {1, 2, 4}
b=0
und
a2 ∈ {1, 4}.
Es folgt, dass das Element 2 nur durch Einheiten und durch assoziierte Elemente teilbar ist. Es besitzt also keine echten Teiler.
√ Bemerkung 3.27 Im Integritätsbereich (Z −5 , +, ·) tritt folgendes interessante Phänomen auf. Wegen
√ √ 6 = 2 · 3 = 1 + −5 · 1 − −5
urf
gilt:
1. Die Zerlegung in irreduzible Elemente ist in diesem Integritätsbereich
nicht eindeutig.
√
2. Das irreduzible Element 1 + −5 teilt das Produkt 2 · 3, aber keinen der
beiden Faktoren,
√
1 + −5 - 2,
√
1 + −5 - 3 .
Ent
w
√ 3. Die beiden Elemente 6 und 3· 1 + −5 besitzen keinen größten gemeinsamen Teiler,
√
√
1, 2, 3, 1 + −5, 1 − −5, 6
sind die Teiler von 6, bis auf Assoziierte. Die Elemente
√
√ 1, 3, 1 + −5, 3 · 1 + −5
√ sind die Teiler von 3 · 1 + −5 , bis auf Assoziierte.
Die gemeinsamen Teiler lauten daher
1, 3, 1 +
√
−5,
bis auf Assoziierte. Ein größter gemeinsamer Teiler müsste sich also (bis
auf Assoziierte) unter diesen Elementen verstecken. Aber:
√ 1 6= 6, 3 · 1 + −5 ,
3.2 Idealtheorie
93
denn sonst gilt 3 | 1, was ein Widerspruch ist.
1.5
√ 3 6= 6, 3 · 1 + −5 ,
√ denn sonst gilt 1 + −5 3. Dies ist ebenfalls ein Widerspruch.
√
√ 1 + −5 6= 6, 3 · 1 + −5 ,
√
denn sonst gilt 3 | 1 + −5, was wieder auf einen Widerspruch führt.
Keiner der gemeinsamen Teiler oder der Assozierten zu ihnen
ist also ein
√ größter gemeinsamer Teiler. Dies bedeutet, dass 6, 3 · 1 + −5 nicht existiert.
3.2 Idealtheorie
urf
Die Suche nach Ringen, in denen die Zerlegung in irreduzible Elemente im
Wesentlichen eindeutig ist, führt zu den sogenannten faktoriellen Ringen.
Integritätsbereiche, in denen die Division mit Rest möglich ist, sind ein wichtiges Beispiel für faktorielle Ringe. Man nennt sie euklidische Ringe. Mehr
zu diesem Thema finden Sie in Remmert, R. und Ullrich, P.: “Elementare
Zahlentheorie”, Birkhäuser, Basel 1995.
In der Gruppentheorie haben wir gesehen, dass die Untergruppeneigenschaft
nicht ausreicht, damit die (Rechts-) Nebenklassen zu N eine Gruppe bilden.
Man muss von einem Normalteiler N der Gruppe (G, ·) ausgehen, um die
Faktorgruppe G/N zu erhalten (siehe dazu Lemma 2.63 und Bemerkung
2.64).
Ent
w
In der Ringtheorie fragen wir, für welche Unterringe S eines Ringes R sich ein
Faktorring R/S definieren lässt. Wir werden sehen, dass S ein sogenanntes
Ideal sein muss.
Definition 3.28 (Ideal)
Sei (R, +, ·) ein Ring. Unter einem Ideal I in R verstehen wir eine Teilmenge
I von R mit den Eigenschaften
(I1) (I, +) ist eine Untergruppe von (R, +).
(I2) ∀ r ∈ R :
Ir ⊆ I und rI ⊆ I.
Schreibweise: I E R
Falls zusätzlich I 6= R gilt, dann nennen wir I ein echtes Ideal von R, Schreibweise: I C R.
94
3 Ringe, Schiefkörper und Körper
1.5
Wenn statt (I2) nur die Eigenschaft Ir ⊆ I gilt, dann heißt I ein Rechtsideal.
Wenn statt (I2) nur die Eigenschaft rI ⊆ I gilt, dann heißt I ein Linksideal.
Für einen Unterring S von R definieren wir die Relation
a ∼S b
a−b ∈ S.
:⇔
Da S ein Unterring von R ist, ist (S, +) eine Untergruppe der additiven
Gruppe (R, +). In der Gruppentheorie haben wir diese Art von Beziehung
bereits kennen gelernt, siehe Lemma 2.33. Es folgt, dass es sich hier um eine
Äquivalenzrelation handelt.
Die Gruppe (R, +) ist abelsch. Daher ist (S, +) nicht nur eine Untergruppe,
sondern sogar ein Normalteiler der Gruppe (R, +). Daher ist die Relation
∼S sogar eine Kongruenzrelation, also mit der Addition verträglich (siehe
Definition 2.53 und Satz 2.54):
a ∼S g,
b ∼S h
⇒
a + b ∼S g + h.
urf
Wir fragen nun, unter welchen Voraussetzungen an den Unterring S die Relation ∼S auch mit der Multiplikation verträglich ist.
Satz 3.29 Sei S ein Unterring von R. Dann gilt: die Äquivalenzrelation ∼S
ist mit der Verknüpfung “·00 verträglich genau dann, wenn S ein Ideal in R
ist.
Beweis. Wir müssen zeigen, dass die Aussage
∀a, b, g, h ∈ R gilt:
a ∼S g, b ∼S h
⇒
a · b ∼S g · h
äquivalent ist zur Aussage
S E R.
(⇐).
Sei a ∼S g und b ∼S h. Dann folgt nach Definition
Ent
w
a−g ∈ S
b−h ∈ S
⇒
∃ i, j ∈ S :
a=g+i
b=h+j.
Wir bilden das Produkt,
a · b = gh + ih + gj + ij.
Wegen i, j ∈ S liegt das Produkt a · b in der Menge
gh + Sh + gS + S · S.
Nun verwenden wir, dass S E R. Laut Definition des Ideals gelten die Beziehungen Sh ⊆ S und gS ⊆ S. Da S ein Ring ist gilt weiters S · S ⊆ S. Daraus
folgern wir
3.2 Idealtheorie
95
Es gibt also ein t ∈ S, sodass
1.5
a · b ∈ gh + S.
ab = gh + t.
Wir erhalten
ab − gh ∈ S
⇒
(⇒).
Sei i ∈ S beliebig.
⇒
⇒
⇒
i ∼S 0
ab ∼S gh.
i · r ∼S 0 · r = 0
i·r−0∈S
Sr ⊆ S
∀r ∈ R
∀r ∈ R
∀r ∈ R
Analog zeigen wir rS ⊆ S für alle r ∈ R. Daher ist S ein Ideal in R.
2
urf
Satz 3.30 Sei I E R und sei
R/I = {r + I : r ∈ R}.
Für zwei Elemente r + I und s + I aus R/I definieren wir
(r + I) + (s + I) = (r + s) + I
(r + I) · (s + I) = (r · s) + I
Dann gilt: (R/I, +, ·) ist ein Ring.
Beweis. Trivial.
2
Ent
w
Definition 3.31 (Faktorring)
Sei I E R. Der Ring (R/I, +, ·) heißt der durch I erzeugte Faktorring.
Beispiel 3.32 Für jede ganze Zahl m ≥ 2 gilt
hmi = mZ E Z.
Der durch mZ erzeugte Faktorring Z/mZ ist ein Ring, es handelt sich um den
bereits wohlbekannten Restklassenring modulo m, geschrieben als (Zm , +, ·).
Definition 3.33 (Ringhomomorphismus, Kern, Bild)
Seien R und R0 zwei Ringe.
Eine Abbildung ϕ : R → R0 heißt ein (Ring-) Homomorphismus, wenn die
zwei Eigenschaften
3 Ringe, Schiefkörper und Körper
(RH1)
(RH2)
∀a, b ∈ R :
∀a, b ∈ R :
ϕ(a + b) = ϕ(a) + ϕ(b)
ϕ(a · b) = ϕ(a) · ϕ(b)
gelten.
1.5
96
Die Begriffe Epimorphismus, Monomorphismus und Isomorphismus von Ringen definiert man wie in der Gruppentheorie.
Der Kern eines Homomorphismus ϕ ist definiert durch
ker ϕ = {g ∈ R : ϕ(g) = 0}.
Das Bild eines Homomorphismus ϕ ist definiert durch
im ϕ = ϕ(R).
Satz 3.34 Sei ϕ : R → R0 ein Ringhomomorphismus. Dann gelten die
folgenden Aussagen:
2. ker ϕ E R
urf
1. im ϕ ≤ R0
3. Sei I ein beliebiges Ideal in R. Dann gibt es einen Ring R 0 und einen
Ringhomomorphismus ϕ : R → R0 so, dass I = ker ϕ.
Beweis. Der Beweis verläuft analog zum entsprechenden Satz für Gruppenhomomorphismen, siehe Lemma 2.81.
Zu 1.
Seien g 0 , h0 ∈ im ϕ, ϕ(g) = g 0 und ϕ(h) = h0 . Da g und h Elemente von R
sind, gilt g − h ∈ R. Deshalb ist ϕ(g − h) ∈ im ϕ. Wegen (RH1) gilt
ϕ(g − h) = ϕ(g) − ϕ(h) ∈ im ϕ.
Ent
w
Weiters ist g · h ∈ R und deshalb gilt ϕ(g · h) ∈ im ϕ. Wegen (RH2) gilt
ϕ(g · h) = ϕ(g) · ϕ(h) ∈ im ϕ.
Damit ist im ϕ ein Unterring von R0 .
Zu 2.
Wir wissen bereits von der Gruppentheorie, dass ker ϕ eine Untergruppe von
(R, +) ist. Das Unterringkriterium (UR1) aus Lemma 3.17 ist damit schon
erfüllt. Für zwei Elemente g, h ∈ ker ϕ ist deren Produkt gh auch im Kern
von ϕ, denn
ϕ(gh) = ϕ(g)ϕ(h) = 0 · 0 = 0.
Damit ist das Unterringkriterium (UR2) ebenfalls erfüllt.
Für g ∈ ker ϕ und r ∈ R beliebig gilt
3.2 Idealtheorie
⇒
⇒
gr ∈ ker ϕ
rg ∈ ker ϕ .
1.5
ϕ(gr) = ϕ(g) ϕ(r) = 0 · ϕ(r) = 0
ϕ(rg) = ϕ(r) ϕ(g) = ϕ(r) · 0 = 0
97
Daraus folgt ker ϕ E R.
Zu 3.
Wir definieren R0 = R/I und ϕ : R → R/I mit ϕ(g) = g + I. Dann ist
I = ker ϕ, was leicht zu zeigen ist.
2
Bemerkung 3.35
1. Für jeden Ring R sind {0} und R trivialerweise Ideale in R.
2. Sei ϕ : R → R0 ein Ringhomomorphismus. Dann ist ϕ injektiv genau
dann, wenn ker ϕ = {0}.
3. Sei ϕ : R → R0 ein Ringhomomorphismus. Dann gilt
R/ ker ϕ ∼
= im ϕ.
urf
Das ist der Homomorphiesatz für Ringe. Der Beweis verläuft wie bei den
Gruppenhomomorphismen.
4. Sei R ein Ring und W eine nichtleere Teilmenge von R. Dann ist
\
I
hW i :=
I Ideal
W ⊆I
das kleinste Ideal, das W enthält.
Definition 3.36 (Erzeugte Ideale)
Sei (R, +, ·) ein Ring und sei W eine nichtleere Teilmenge von R. Das Ideal
hW i heisst das von W erzeugte Ideal.
Ent
w
Definition 3.37 (Hauptideale)
Sei (R, +, ·) ein Ring. Das von einem Element a ∈ R erzeugte Ideal wird das
durch a erzeugte Hauptideal genannt und mit hai bezeichnet.
Lemma 3.38 Sei R ein kommutativer Ring mit Einselement. Dann gilt für
jedes Element a ∈ R die Beziehung
hai = aR.
Beweis. Wir zeigen zunächst, dass aR ein Ideal ist. Seien ar, as ∈ aR. Dann
ist ar − as = a(r − s) auch in aR und somit ist (aR, +) eine Untergruppe
von (R, +).
Sei nun r ∈ R und as ∈ aR beliebig. Dann ist wegen der Kommutativität
von (R, ·)
98
3 Ringe, Schiefkörper und Körper
∈ aR.
Es folgt
Analog zeigt man
Es folgt aR E R.
1.5
r(as) = a(rs)
∀r ∈ R :
r aR ⊆ aR.
∀r ∈ R :
aR r ⊆ aR.
Zu hai ⊆ aR.
Wir wissen, dass a in aR enthalten ist. Die Menge aR ist also ein Ideal, das a
enthält. Das kleinste Ideal, das a enthält, ist aber hai. Das Ideal aR enthält
also das Ideal hai.
Zu aR ⊆ hai.
Da hai ein Ideal ist, gilt für beliebige r ∈ R
ar ∈ hai
⇒
aR ⊆ hai.
2
urf
Beispiel 3.39
1. Sei R ein Ring mit Einselement. Dann sind {0} = h0i und R = h1i
Hauptideale.
2. In Z ist h3i = 3 Z = Z3 ein Hauptideal.
Definition 3.40 (Hauptidealring)
Unter einem Hauptidealring verstehen wir einen kommutativen Ring mit
Einselement, in dem jedes Ideal ein Hauptideal ist.
Satz 3.41 Z ist ein Hauptidealring.
Beweis. Sei I ein Ideal in Z. Falls I = h0i, dann ist I trivialerweise ein
Hauptideal.
Ent
w
Sei also I 6= h0i und sei d die kleinste natürliche Zahl in I. Dann wissen wir,
dass hdi ⊆ I. Wir erhalten
hdi = Zd ⊆ I.
Sei umgekehrt i ∈ I mit i 6= 0. Wegen der Division mit Rest gibt es ein q ∈ Z
und ein r mit 0 ≤ r < d, sodass
i = q · d + r.
Da aber d minimal ist, muss r = 0 sein und daher gilt i ∈ hdi. Somit haben
wir auch die Umkehrung
I ⊆ hdi
bewiesen.
2
3.3 Polynomringe
99
1.5
Lemma 3.42 Sei P(N) = {M : M ⊆ N} die Potenzmenge von N. Dann ist
(P(N), +, ·) zwar ein kommutativer Ring mit Einselement, aber kein Hauptidealring, wobei
A + B = (A\B) ∪ (B\A)
die symmetrische Differenz zweier Mengen A und B bezeichnet und die zweite
Verknüpfung durch A · B = A ∩ B definiert ist, siehe Beispiel 3.9.
Beweis. Wir wissen bereits, dass (P(N), +, ·) ein kommutativer Ring mit
Einselement N ist. Das Nullelement ist die leere Menge ∅. Das Inverse zu Y
bezüglich der Verknüpfung + ist die Menge Y selbst, denn Y + Y = ∅.
Nach Lemma 3.38 hat jedes Hauptideal hAi in P(N) die Gestalt
hAi = A · P(N) = A ∩ Y mit Y ∈ P(N) = X ∈ P(N) : X ⊆ A .
Wir definieren nun ein spezielles Ideal in P(N) und liefern damit ein Gegenbeispiel. Sei
I = X ∈ P(N) : X ist endlich. .
urf
I ist eine Untergruppe von (P(N), +), denn die Eigenschaft (UG2) ist automatisch erfüllt und (UG1) gilt ebenfalls: für X, Y ∈ I ist X + Y ebenfalls
endlich und somit liegt X + Y ebenfalls in I.
Weiters gilt für alle M ∈ P(N):
I ∩ M ⊆ I und M ∩ I ⊆ I.
Somit ist I ein Ideal in (P(N), +, ·)
Wir erhalten jetzt einen Widerspruch: Wäre (P(N), +, ·) ein Hauptidealring,
dann wäre I = hAi mit einem A ∈ P(N). Daraus folgt aber, dass A ein
Element von I wäre. Also wäre A eine endliche Teilmenge von N.
Nun gilt aber
Ent
w
hAi = A · P(N) = X ∈ P(N) : X ⊆ A .
Wegen I = hAi wäre daher jedes Y ∈ I eine Teilmenge von A. Das bedeutet,
dass A eine endliche Teilmenge von N ist, die jede endliche Teilmenge Y von
N enthält. Das ist aber offensichtlich ein Widerspruch, denn es gibt ja keine
solche ”größte” endliche Teilmenge von N.
2
3.3 Polynomringe
Wir gehen von einem Ring (R, +, ·) aus. Wie könnte man den Begriff “Polynom mit Koeffizienten aus R” definieren?
100
3 Ringe, Schiefkörper und Körper
Ein erster (naiver) Ansatz ist es, einen Ausdruck der Form
1.5
a0 + a 1 x + · · · + a n x n
mit Koeffizienten ai ∈ R als Polynom zu bezeichnen. Beispielsweise wäre
dann für (R, +, ·) = (Z, +, ·) der Ausdruck
7x2 − 3x + 2
ein Polynom mit Koeffizienten aus Z.
Bei der Sache gibt es aber ein Problem. Betrachten wir dazu als den zugrundeliegenden Ring den Restklassenring (Z2 , +, ·). Sei weiters f (x) = x2 − x =
x(x−1) und sei g(x) = 0, x ∈ Z2 . Dann kommen wir in Schwierigkeiten, denn
das Polynom f ist verschieden vom Polynom g, die Funktion f : Z2 → Z2 ist
aber gleich der Funktion g : Z2 → Z2 :
f (x) = g(x) = 0
∀x ∈ Z2 .
urf
Wir haben also zwei Objekte f und g, für die gilt: Betrachtet man f und g
als zwei Polynome, dann sind sie verschieden. Betrachtet man f und g aber
als zwei Funktionen, dann sind sie gleich.
Bemerkung 3.43 Der Begriff des Polynomes ist also etwas Anderes als einfach ein Name für spezielle Funktionen.
Definition 3.44 (Polynom, formale Potenzreihe)
Sei (R, +, ·) ein Ring. Wir bezeichnen die direkte Summe
(R, +) ⊕ (R, +) ⊕ (R, +) ⊕ . . .
mit R[X] und das direkte Produkt
(R, +) × (R, +) × (R, +) × . . .
Ent
w
mit R[[X]]. Wir nennen die Elemente von R[X] Polynome über R und die
Elemente von R[[X]] formale Potenzreihen über R.
Für f = (a0 , a1 , a2 , . . . ) ∈ R[X] heißen a0 , a1 , . . . die Koeffizienten des Polynoms f .
Das spezielle Polynom 0 = (0, 0, 0, . . . ) heißt das Nullpolynom.
Sei f ∈ R[X] mit f 6= 0. Unter dem Grad von f verstehen wir die nichtnegative ganze Zahl
deg(f ) = max{n ∈ N ∪ {0} : an 6= 0}.
Der Koeffizient ak mit k = deg(f ) heißt dann der Leitkoeffizient von f . Ein
Polynom vom Grad 0 heißt ein konstantes Polynom. Ein nichtkonstantes Polynom f 6= 0 heißt normiert, wenn sein Leitkoeffizient gleich dem Einselement
des Ringes (R, +, ·) ist.
3.3 Polynomringe
101
1.5
Wir nennen zwei Polynome f = (a0 , a1 , a2 , . . . ) und g = (b0 , b1 , b2 , . . . )
gleich, wenn
ak = b k
∀ k = 0, 1, . . .
Bemerkung 3.45 Wir erinnern an die Definition der direkten Summe von
Gruppen, siehe Lemma 2.91 und Definition 2.92 in Kapitel 2.3. Jedes Element
f der direkten Summe
R[X] = (R, +) ⊕ (R, +) ⊕ (R, +) ⊕ . . .
hat die Gestalt f = (a0 , a1 , a2 , . . . ) mit ai ∈ R und es sind nur endlich viele
der ai verschieden vom Nullelement von R. Ab einer Stelle sind also alle
weiteren Koeffizienten ai gleich 0,
f = (a0 , a1 , a2 , . . . , an , 0, 0, . . . ).
In Ergänzung zu Definition 3.44 halten wir fest:
• Konstante Polynome haben die Gestalt f = (a0 , 0, 0, . . . )
urf
• Der Begriff des normierten Polynomes setzt voraus, dass es im Ring
(R, +, ·) ein Einselement gibt. Normierte Polynome sind also nur definiert
für Ringe mit Einselement.
• Ein normiertes Polynom hat die Gestalt f = (a0 , a1 , . . . , an−1 , 1), wobei
n = deg(f ), n ≥ 1.
• Wenn wir ein Polynom f ∈ R[X] in der Form f = (a0 , . . . , an ) schreiben,
dann meinen wir damit das Polynom f = (a0 , a1 , . . . , an , 0, 0, . . . ).
Bemerkung 3.46 Wir haben das direkte Produkt und die direkte Summe
von Gruppen bereits erklärt, siehe Definition 2.92. Von dort wissen wir, dass
(R[X], +) mit der Verknüpfung (f = (a0 , a1 , a2 , . . . ), g = (b0 , b1 , b2 , . . . ))
Ent
w
f + g = (a0 + b0 , a1 + b1 , a2 + b2 , . . . )
eine kommutative Gruppe ist.
Wir definieren nun auf R[X] eine zweite innere Verknüpfung:
f · g = (c0 , c1 , c2 , . . . ),
wobei
cn :=
n
X
k=0
ak bn−k
∀ n ≥ 0.
Somit erhalten wir ein Tripel (R[X], +, ·) mit dem Nullelement
0 = (0, 0, 0, . . . )
102
3 Ringe, Schiefkörper und Körper
1.5
und dem Einselement
1 = (1, 0, 0, . . . ),
falls der Ring (R, +, ·) ein Einselement 1 besitzt.
Lemma 3.47 Sei (R, +, ·) ein Ring mit Einselement und sei
X = (0, 1, 0, . . . ).
Dann kann jedes Element f = (a0 , a1 , . . . , an , 0, 0, . . . ) von R[X] in der Form
f = a 0 + a1 X + · · · + a n X n
geschrieben werden.
Beweis. Aus der Definition der inneren Verknüpfung “·” erhalten wir
und
urf
X 2 = X · X = (0, 0, 1, 0, 0, . . . )
X 3 = X · X · X = (0, 0, 0, 1, 0, 0, . . . ).
Es liegt daher die Vermutung nahe, dass
X n = (0, 0, · · · , 0, 1, 0, 0, . . . ),
|
{z
}
n mal
was leicht mittels Induktion zu beweisen ist.
Von nun an identifizieren wir das konstante Polynom (a, 0, 0, . . . ) ∈ R[X]
mit dem Ringelement a. Weiters schreiben wir das Produkt
Ent
w
(a, 0, 0, . . . ) · f
für f ∈ R[X] in der Form
af.
Diese Festlegung ist sinnvoll, denn
aX = (a, 0, 0, . . . ) · (0, 1, 0, 0, . . . )
= (0, a, 0, 0, . . . )
aX
2
= (0, 0, a, 0, 0, . . . )
aX
3
= (0, 0, 0, a, 0, 0, . . . )
...
3.3 Polynomringe
103
1.5
für alle a ∈ R. Daher erhalten wir für f = (a0 , a1 , . . . , an , 0, 0, . . . ) ∈ R[X]
die Darstellung
f = (a0 , 0, 0, . . . ) + (0, a1 , 0, 0, . . . ) + · · · + (0, 0, . . . , 0, an , 0, 0, . . . )
= a0 + a1 X + a 2 X 2 + . . . + a n X n .
2
Bemerkung 3.48 Sei (R, +, ·) ein Ring mit Einselement 1. Das Symbol X
bezeichnet keine Unbestimmte, sondern etwas ganz Bestimmtes:
• X ist die Bezeichnung für das Polynom (0, 1, 0, 0, · · · ) ∈ R[X].
• X 2 ist das Produkt des Polynoms X = (0, 1, 0, 0, · · · ) mit sich selbst. Es
gilt daher nach der Definition des Produktes zweier Polynome:
X 2 = (0, 0, 1, 0, 0, · · · ).
• X 3 , X 4 , X 5 , ... ergeben sich analog.
urf
• Nach Lemma 3.47 gilt für f = (a0 , a1 , . . . , an ) ∈ R[X] daher
f = a 0 + a1 X + a 2 X 2 + . . . + a n X n .
Satz 3.49
1. Sei (R, +, ·) ein Ring. Dann ist (R[X], +, ·) ebenfalls ein Ring.
2. Wenn R kommutativ ist, dann ist auch R[X] kommutativ.
3. Wenn R ein Einselement besitzt, dann besitzt auch R[X] ein Einselement.
4. Wenn R ein Integritätsbereich ist, dann ist auch R[X] ein Integritätsbereich.
Ent
w
5. Wenn R ein Körper ist, dann folgt daraus im Allgemeinen nicht, dass
auch R[X] ein Körper ist.
Beweis. Der Beweis zu Punkt 1 besteht aus langweiligem Rechnen und wird
daher ausgelassen.
Zu 2.
Wir müssen zeigen, dass f · g = g · f für alle Elemente f, g von R[X] gilt.
Dazu betrachten wir den Koeffizienten
cn =
n
X
ak bn−k
k=0
des Polynomes f · g. Wegen der Kommutativität von R kann man schreiben
104
3 Ringe, Schiefkörper und Körper
cn =
n
X
bn−k ak .
1.5
k=0
Da die Addition in einem Ring kommutativ ist, können wir die Reihenfolge
der Summation verändern und erhalten
cn =
n
X
bj an−j .
j=0
Die Multiplikation ist somit auch in R[X] kommutativ.
Zu 3.
Diese Behauptung ist trivial. Das Einselement von R[X] ist 1 = (1, 0, 0, . . . ).
Zu 4.
Sei f = (a0 , a1 , a2 , . . . ), g = (b0 , b1 , b2 , . . . ) und sei weiters
f · g = (c0 , c1 , c2 , . . . ) = 0.
Zusätzlich nehmen wir an, dass g 6= 0. Es ist zu zeigen, dass f = 0 sein muss.
urf
Wegen g 6= 0 ist mindestens eines der bk von Null verschieden. Deshalb ist
die Definition
m = min{k ≥ 0 : bk 6= 0}
sinnvoll. Dann gilt aber die Beziehung
cm = a0 bm + a1 bm−1 + . . . + am b0 = 0.
{z
}
|
=0
Da bm 6= 0 ist, muss a0 = 0 sein. Es folgt
cm+1 = a0 bm+1 + a1 bm + a2 bm−1 + . . . + am+1 b0 = 0,
|
{z
}
| {z }
=0
=0
Ent
w
wir erhalten aus dieser Gleichung a1 bm = 0. Es folgt a1 = 0. Wir können
dieses Verfahren in induktiver Weise fortführen und erhalten so
ak = 0
∀ k = 0, 1, 2, . . .
Also muss f = 0 sein.
Zu 5.
Wir zeigen, dass das Polynom X = (0, 1, 0, 0, . . . ) in R[X] kein Inverses
besitzt. Sei dazu X · g = 1 = (1, 0, 0, . . . ), also g das Inverse zu X,
X = (a0 , a1 , a2 , . . . ) = (0, 1, 0, 0, · · · ),
g = (b0 , b1 , b2 , . . . ).
Dann folgt durch Koeffizientenvergleich in X · g = 1 die Beziehung
3.3 Polynomringe
105
a0 b0 = 1 =⇒ 0 · b0 = 0 = 1,
was ein Widerspruch ist.
1.5
2
Definition 3.50 (Teiler, Vielfaches, irred. Polynom)
Sei (R, +, ·) (und damit auch (R[X], +, ·)) ein Ring mit Einselement. Seien
f, g ∈ R[X]. Wir sagen, das Polynom g teilt das Polynom f , falls ein h ∈ R[X]
existiert mit
f = g · h.
Das Polynom g heißt dann ein Teiler von f . Weiters heißt f ein Vielfaches
von g, Schreibweise: g | f Das Polynom g heißt ein echter Teiler von f , wenn
0 < deg g < deg f.
Ein Polynom f heißt irreduzibel, wenn es keine echten Teiler besitzt. Andernfalls heißt f reduzibel.
urf
Lemma 3.51 Sei (R, +, ·) ein Ring und 0 das Nullpolynom in R[X]. Wir
definieren
deg(0) = −∞
und rechnen mit dem Symbol −∞ wie üblich, also
∀ n ∈ N ∪ {0},
−∞ + n = − ∞
−∞ + −∞ = − ∞.
Dann gilt
1. deg(f · g) ≤ deg f + deg g für alle f, g ∈ R[X].
2. Wenn das Produkt der Leitkoeffizienten von f und g von Null verschieden
ist, dann gilt sogar
Ent
w
deg(f · g) = deg f + deg g.
Beweis.
Sei f = (a0 , a1 , . . . , an ) mit an 6= 0, also deg f = n. Sei g = (b0 , b1 , . . . , bm )
mit bm 6= 0, also deg g = m. Dann gilt
f · g = (c0 , c1 , c2 , . . . )
mit ck =
k
X
ai bk−i .
i=0
Wie man leicht nachrechnet, gilt cm+n = an ·bm , für alle weiteren Koeffizienten folgt ck = 0 für alle k > m + n. Daraus folgen die beiden Behauptungen.
2
106
3 Ringe, Schiefkörper und Körper
1.5
Korollar 3.52 (Gradregel)
Falls (R, +, ·) ein Integritätsbereich ist und f und g zwei Polynome aus R[X]
sind, so folgt die Beziehung
deg f · g = deg f + deg g.
Satz 3.53 (Division mit Rest)
Sei (R, +, ·) ein Ring mit Einselement. Seien f, g ∈ R[X],
f =
g =
n
X
i=0
m
X
ai X i
mit an 6= 0
bi X i
mit bm = 1.
i=0
Dann gibt es zwei Polynome q, r ∈ R[X] mit den Eigenschaften
• f = q·g + r ,
urf
• r = 0 oder deg r < deg g ,
• r und q sind eindeutig bestimmt.
Beweis. Wir beweisen zuerst die Existenz von q und r. Falls deg f < deg g
gilt, dann existiert trivialerweise eine derartige Darstellung: f = 0 · g + f .
Sei deshalb deg f ≥ deg g und sei
f1 = f − an X n−m g.
Wegen bm = 1 folgt daraus
k1 = deg f1 < deg f.
Ent
w
Für den Fall, dass k1 < m = deg g ist, sind wir schon fertig, denn dann gilt
die Beziehung
f = f1 + an X n−m g.
|{z} | {z }
r
q
Falls aber k1 ≥ m sein sollte, dann betrachten wir das Polynom
f1 = c 0 + c 1 X + · · · + c k1 X k1
und verwenden den gleichen Trick ein zweites Mal. Wir definieren
f2 = f1 − ck1 X k1 −m g,
dessen Grad wieder kleiner ist als der von f1 , dann
3.3 Polynomringe
Auf diese Weise erhalten wir eine Kette
usw. . . .
1.5
f3 = f2 − ck2 X k2 −m g,
107
n > k 1 > k2 > · · · .
Nach endlich vielen Schritten erhalten wir ein Polynom fj mit deg fj < m.
Das ursprüngliche Polynom f lässt sich schreiben als
f = an X n−m + ck1 X k1 −m + · · · + ckj−1 X kj−1 −m ·g + fj .
|{z}
|
{z
}
r
q
Zur Eindeutigkeit.
Angenommen es gäbe Konstanten q, r und q 0 , r0 mit
f =q·g + r
f = q0 · g + r0
und
deg r < deg g
(3.1)
und
deg r 0 < deg g.
(3.2)
Aus den beiden Bedingungen deg r, deg r 0 < deg g folgt
urf
deg(r − r 0 ) < deg g.
Durch Subtraktion der Zeile (3.2) von der Zeile (3.1) erhalten wir
(q − q 0 ) · g = r − r 0 .
Angenommen q − q 0 6= 0, Dann gilt
deg (q − q 0 ) · g
= deg r − r 0 .
Angenommen q−q 0 6= 0. Das heißt, dass der Leitkoeffizient von q−q 0 ungleich
0 ist. Da der Leitkoeffizient von g gleich 1 ist, wäre daher der Leitkoeffizient
von (q − q 0 ) · g ungleich 0.
Ent
w
Nach Lemma 3.51(2) gilt dann
deg r − r 0 = deg (q − q 0 ) · g = deg(q − q 0 ) + deg g ≥ deg g,
was aber ein Widerspruch zu
deg(r − r 0 ) < deg g.
ist. Somit gilt q = q 0 . Es folgt r = r 0 .
2
Korollar 3.54 Wenn (R, +, ·) ein Körper ist, dann reicht in Satz 3.53 die
Voraussetzung bm 6= 0 aus. Die Bedingung bm = 1 ist in diesem Fall unnötig.
108
3 Ringe, Schiefkörper und Körper
f:
→
R
1.5
Definition 3.55 (Polynomfunktion)
Sei (R, +, ·) ein Ring und sei (R[X], +, ·) der Polynomring über R. Unter
der Polynomfunktion f zum Polynom f = (a0 , a1 , . . . , an ) ∈ R[X] verstehen
wir die Funktion
R,
f (x) = a0 + a1 x + . . . + an xn ,
x ∈ R.
Beispiel 3.56 Sei (R, +, ·) = (Z2 , +, ·), sei f = (0, 1, 1) = X + X 2 und sei
g = 0 = (0, . . . , 0). Dann gilt offensichtlich f 6= g. Betrachten wir aber die
zugeordneten Polynomfunktionen, so sehen wir, dass f = g = 0:
f (x) = x + x2 = 0
∀x ∈ R = Z2 .
Zwei verschiedenen Polynomen kann also die gleiche Polynomfunktion zugeordnet sein.
Frage 3.57 Für welche Ringe gilt
⇔
f = g
?
urf
f = g
Lemma 3.58 Sei (R, +, ·) ein kommutativer Ring, seien f, g ∈ R[X], und
sei a ein Element aus R. Dann folgt
1. f + g = f + g
2. f · g = f · g
3. af = af
Beweis. Seien f = (a0 , a1 , . . . , an , . . . ) und g = (b0 , b1 , . . . , bm , . . . )
Elemente von R[X].
Ent
w
Zu 1.
Es gilt f + g = (a0 + b0 , a1 + b1 , a2 + b2 , . . . ) und daher
f + g(x) = (a0 + b0 ) + (a1 + b1 )x + . . . =
=
∞
X
aj x j +
j=0
∞
X
∞
X
(aj + bj )xj =
j=0
bj xj = f (x) + g(x).
j=0
Zu 2.
Nach Definition des Produktes zweier Polynome gilt
f · g = (c0 , c1 , c2 , . . . )
mit cn =
n
X
k=0
ak bn−k , n = 0, 1, 2, . . .
3.3 Polynomringe
109
Daraus folgt
=
0
X
ak b0−k + x
j=0
ak b1−k + x2
k=0
k=0
∞
X
1
X
x
j
j
X
ak bj−k =
ak b2−k + . . . =
k=0
∞
X
k=0
k=0
2
X
1.5
f · g(x) =
k
ak x ·
Zu 3.
af ist eine Kurzschreibweise für
∞
X
k=0
bk xk = f (x) · g(x).
(a, 0, 0, . . . ) · (a0 , a1 , . . . , an , 0, . . . ).
Damit folgt Punkt 3. aus Punkt 2. als Spezialfall.
2
Definition 3.59 (Nullstelle)
Sei (R, +, ·) ein Ring und f ∈ R[X]. Ein Element a ∈ R heißt eine Nullstelle
von f , wenn f (a) = 0.
urf
Satz 3.60 Sei (R, +, ·) ein kommutativer Ring mit Einselement, f ∈ R[X]
und a eine Nullstelle von f . Dann gibt es ein g in R[X] mit
f = (X − a) · g.
Beweis. Falls f = 0, dann ist g = 0 eine passende Wahl. Dies ist der triviale
Fall.
Sei also f 6= 0. Wäre deg f = 0, dann wäre f = (a0 , 0, 0, . . . ) mit a0 6= 0.
Damit wäre f (a) = a0 6= 0. Dies ist aber ein Widerspruch zur Voraussetzung,
dass a eine Nullstelle von f ist. Es muss also deg f ≥ 1 gelten. Nach Satz
3.53 (Division mit Rest) gibt es eindeutig bestimmte Polynome q und r mit
Ent
w
f = q · (X − a) + r,
wobei entweder r = 0 oder deg r < deg(X − a) = 1. Es folgt deg r = 0 oder
r = 0, also gilt in jedem Fall r = (b, 0, 0, . . . ) mit einem b ∈ R. Wir erhalten
f = q · X − a + b,
also
f (x) = q(x) · (x − a) + b.
Wegen f (a) = 0 folgt daraus, dass b = 0 sein muss. Somit gilt r = 0.
2
Satz 3.61 Sei (R, +, ·) ein Integritätsbereich und sei f ∈ R[X], f 6= 0.
Dann besitzt f in R höchstens deg f Nullstellen.
110
3 Ringe, Schiefkörper und Körper
1.5
Beweis. Falls deg f = 0 gilt, dann besitzt f keine Nullstelle in R. Für diesen
Fall stimmt die Behauptung also trivialerweise. Falls deg f ∈ N gilt, so führen
wir einen induktiven Beweis nach n = deg f .
Induktionsanfang:
Sei n = 1. Dann hat f die Form f = aX + b mit a, b ∈ R, a 6= 0. Also ist
f (x) = ax + b. Die Abbildung f ist injektiv, wie man leicht nachprüft. Um
die Nullstellen von f zu finden, suchen wir alle x ∈ R, für die gilt
ax + b = 0.
Aus der Injektivität von f folgt, dass jede Nullstelle von f eindeutig bestimmt
ist, wenn sie existiert. Daher f besitzt höchstens eine Nullstelle.
Induktionsvoraussetzung:
Jedes Polynom g ∈ R[X] mit g ≤ 0, mit Grad k 6= n besitzt höchstens k
Nullstellen in R.
urf
Induktionsschritt:
Sei nun f ∈ R[X] mit deg f = n + 1. Wenn f keine Nullstelle in R besitzt,
dann sind wir bereits fertig. Wenn f eine Nullstelle a in R besitzt, dann
folgt nach Satz 3.60 f = (X − a) · g, mit g ∈ R[X], g 6= 0. Weiters gilt
wegen Korollar 3.52 die Beziehung deg g = n, denn wir rechnen in einem
Integritätsbereich. Es folgt
f (x) = X − a · g(x) = (x − a) · g(x).
Daher ist jede Nullstelle von f , die von a verschieden ist, auch eine Nullstelle
von g. Nach Induktionsvoraussetzung besitzt g höchstens n Nullstellen. Somit
besitzt f höchstens n + 1 Nullstellen.
2
Korollar 3.62 Sei (R, +, ·) ein Integritätsbereich mit unendlich vielen Elementen. Dann gilt für alle Polynome f, g ∈ R[X] die Beziehung
⇔
f = g.
Ent
w
f = g
Beweis.
Zu (⇒) Trivial.
Zu (⇐)
Aus f = g folgt
∀ x ∈ R.
f (x) = g(x)
Daraus folgt weiters
f (x) − g(x) = 0
∀x ∈ R
⇒
f − g(x) = 0
∀x ∈ R.
Das Polynom f − g besitzt also unendlich viele Nullstellen. Nach Satz 3.61
muss das Polynom f − g daher das Nullpolynom 0 sein.
2
3.3 Polynomringe
111
1.5
Auf Grund dieses Korollars werden wir im Folgenden für die Fälle R =
Z, Q, R, C nicht mehr so streng zwischen Polynomen und Polynomfunktionen unterscheiden.
Wir haben nun geklärt, wann die Gleichheit von Polynomen gleichbedeutend
ist mit der Gleichheit der zugehörigen Polynomfunktionen. Als Nächstes untersuchen wir, wann ein Polynom irreduzibel ist.
Bemerkung 3.63 Sei (R, +, ·) ein Integritätsbereich. Dann sind alle Polynome über R vom Grad Eins irreduzibel.
Satz 3.64 (Fundamentalsatz der Algebra)
Jedes nichtkonstante Polynom f ∈ C[X] besitzt mindestens eine Nullstelle in
C.
Für den Beweis des Fundamentalsatzes der Algebra verweisen wir auf die
Literatur.
Satz 3.65 Für R[X] und C[X] gilt:
urf
1. Die irreduziblen Polynome aus C[X] sind genau jene vom Grad Eins.
2. Die irreduziblen Polynome aus R[X] sind jene vom Grad Eins sowie diejenigen Polynome a0 + a1 X + a2 X 2 vom Grad zwei, für die gilt:
a1 2 − 4a0 a2 < 0.
Beweis.
Zu 1.
Diese Behauptung folgt aus dem Fundamentalsatz der Algebra: nach diesem
Satz kann man jedes Polynom f mit deg f ≥ 1 in C[X] in die “Linearfaktoren” X − αi zerlegen, wobei α1 , α2 , . . . die Nullstellen von f sind. Es kann
natürlich sein, dass manche der αi mehrfach vorkommen.
Ent
w
Zu 2.
Wir wissen bereits, dass alle Polynome vom Grad Eins irreduzibel sind. Wenn
für f = a0 + a1 X + a2 X 2 mit a2 6= 0 die Bedingung
a1 2 − 4a0 a2 < 0
gilt, dann kann f nicht reduzibel sein. Sonst müsste ja f = g · h mit g, h ∈
R[X] und deg g = deg h = 1 gelten. Also wäre
g = b0 + b1 X,
h = c0 + c1 X,
wobei b1 , c1 6= 0. Dann hätte aber f reelle Nullstellen, was wegen der
Bedingung a1 2 − 4a0 a2 < 0 unmöglich der Fall sein kann, angesichts der
Lösungsformel für quadratische Gleichungen.
112
3 Ringe, Schiefkörper und Körper
Jedes Polynom
1.5
f = a 0 + a1 X + · · · + a k X k
aus R[X] mit ungeraden Grad k ≥ 3 hat mindestens eine reelle Nullstelle,
ist also reduzibel. Denn f ist stetig auf R und verhält sich für x → ±∞
wie die Funktion g(x) = ak xk , die nach dem Zwischenwertsatz für stetige
Funktionen, sicherlich irgendwo die x-Achse schneidet.
Für den Fall gerader Grade k ≥ 4 verweisen wir auf die Literatur.
Satz 3.66 Sei K ein Körper. Dann gilt
1. K[X] ist ein Hauptidealring.
2
2. Seien p, f, g ∈ K[X], mit p irreduzibel und p | f · g. Dann folgt
p|f
oder p | g.
urf
Beweis.
Zu 1.
Sei I 6= h0i ein Ideal in K[X]. Wegen I 6= h0i existiert ein Element p 6= 0 in
I mit minimalem Grad. Sei nun i ∈ I, i 6= 0. Dann gibt es q und r in K[X]
mit
i = q · p + r,
wobei r = 0 oder deg r < deg p.
Falls r = 0, so gilt I = hpi und die Behauptung ist gezeigt.
Falls r 6= 0, so folgt wegen r = i − q · p ∈ I und deg r < deg p ein Widerspruch zur Minimalität des Grades von p. Somit gilt I ⊆ hpi. Wegen der
trivialen Beziehung hpi ⊆ I folgt I = hpi. Somit ist jedes Ideal I von K[X]
ein Hauptideal.
Zu 2.
Sei p irreduzibel mit p | f · g und p - f . Dann müssen wir zeigen, dass p | g.
Ent
w
Wir betrachten dazu die Menge
I = {af + bp : a, b ∈ K[X]} .
Es ist leicht zu sehen, dass f, p ∈ I. Weiters ist I ein Ideal. Dazu überprüfen
wir die Bedingungen (I1) und (I2), siehe Definition 3.28.
Zu (I1).
Seien r, r 0 ∈ I. Dann gibt es Elemente a, b, a0 , b0 ∈ K[X], sodass
r = a·f + b·p
r 0 = a0 · f + b 0 · p
⇒
r − r 0 = (a − a0 ) · f + (b − b0 ) · p ∈ I.
Zu (I2).
Sei r ∈ I und c ∈ K[X] beliebig. Dann gilt
3.3 Polynomringe
113
c · r = (c · a) · f + (c · b) · p ∈ I.
1.5
K[X] ist ein Hauptidealring und I ein Ideal in K[X]. Daher existiert ein
Polynom d ∈ K[X] mit hdi = I. Die Elemente p und f liegen in I, daher gilt
d | p und d | f .
Da p irreduzibel ist, muss also entweder d assoziiert zu p oder d eine Einheit
sein. Wäre d ∼ p, so müsste wegen d | f auch p | f gelten. Dies ist aber ein
Widerspruch zur Voraussetzung.
Es bleibt also nur mehr die Möglichkeit, dass d eine Einheit ist. Es existiert
daher ein e ∈ K[X] mit d · e = 1. Wegen eI ⊆ I (siehe (I2) in Definition 3.28)
folgt 1 ∈ I. Aus der Definition von I folgt die Existenz von a, b ∈ K[X] mit
1 = a · f + b · p.
Wir multiplizieren mit g und erhalten
g = a · f g + (bg) · p.
urf
Zu Begin des Beweises hatten wir vorausgesetzt, dass p | f g. Deshalb teilt p
die rechte Seite der letzten Gleichung. Es folgt p | g.
2
Bemerkung 3.67 Sei K ein Körper und sei I 6= h0i ein Ideal in K[X],
I = hdi. Wenn wir verlangen, dass d ein normiertes Polynom von minimalem
Grad ist, dann ist d eindeutig bestimmt.
Dies ist leicht einzusehen. Wenn e ein weiteres normiertes Polynom von minimalem Grad in I ist, dann gilt nach der Division mit Rest die Beziehung
e = q · d, wobei nach der Gradregel deg q = 0. Es kann kein Rest r 6= 0 auftreten, da dies ein Widerspruch zur Minimalität des Grades von d wäre. Da d
und e normiert sind, muss das konstante Polynom q gleich dem Einspolynom
1 sein. Es folgt d = e.
Ent
w
Mit Hilfe von Satz 3.66 können wir nun zeigen, dass der Begriff des größten
gemeinsamen Teilers in K[X] sinnvoll definiert werden kann. Dazu benötigen
wir das folgende Lemma.
Lemma 3.68 Sei K ein Körper und seien f, g ∈ K[X]. Dann existiert ein
eindeutig bestimmtes Element d in K[X] mit den Eigenschaften
1. d | f und d | g
2. d ist normiert
3. e | f und e | g ⇒ e | d
4. Es gibt a, b ∈ K[X] mit d = a · f + b · g.
114
3 Ringe, Schiefkörper und Körper
Beweis. Zu 1., 2., 4.
Sei
1.5
I = {a · f + b · g : a, b ∈ K[X]}.
Dann ist I ein Ideal und es existiert nach Bemerkung 3.67 ein eindeutig
bestimmtes normiertes Polynom d ∈ K[X] mit I = hdi.
Aus dieser Darstellung folgen sofort die Behauptungen 1., 2. und 4.
Zu 3.
Sei e ein Element mit e | f und e | g. Es folgt
⇒
⇒
f, g ∈ hei
d = a · f + b · g ∈ hei
e | d.
Zur Eindeutigkeit von d.
Seien d und e zwei Polynome, für die die vier Aussagen des Satzes gelten. Es
folgt
I = hdi = hei,
urf
also d | e und e | d. Nach Lemma 3.24 gilt dann d ∼ e.
Was sind die Einheiten in K[X]? Offensichtlich gilt
|1
⇔
∈ K.
Somit unterscheiden sich d und e nur um eine Einheit, also um einen Faktor
c ∈ K. Da d und e normiert sind, muss aber c = 1 sein und es folgt die
Gleichheit d = e.
2
Ent
w
Definition 3.69 (Größter gemeinsamer Teiler)
Das nach Lemma 3.68 eindeutig bestimmte normierte Polynom heißt der
größte gemeinsame Teiler von f und g und wird mit ggT(f, g) bezeichnet.
Zwei Polynome f und g heißen relativ prim, wenn ggT(f, g) = 1 gilt.
Satz 3.70 Sei K ein Körper. Dann kann jedes Polynom f ∈ K[X], f 6= 0,
mit einem Grad größer oder gleich Eins bis auf die Reihenfolge der Faktoren
eindeutig in der Form
f = c · p 1 · p2 · . . . · p r
dargestellt werden, wobei c ∈ K und pi ∈ K[X] irreduzible und normierte
Polynome sind.
Beweis. Zum Nachweis der Existenz einer solchen Zerlegung führen wir einen
Induktionsbeweis nach dem Grad von f .
Induktionsanfang: deg f = 1
Aus Bemerkung 3.63 folgt, dass f irreduzibel ist. Sei c der Leitkoeffizient
3.3 Polynomringe
115
1.5
von f . Wir definieren p1 = c−1 · f . Dann ist das Polynom p1 normiert und
irreduzibel. Damit haben wir eine derartige Darstellung von f gefunden.
Induktionsannahme:
Die Behauptung gilt für jedes Polynom vom Grad kleiner als n = deg f .
Induktionsschritt:
Sei f = (a0 , a1 , . . . , an ) ein Polynom vom Grad n, also mit an 6= 0. Falls f
irreduzibel ist, dann ist die Darstellung
f = an · an −1 f
eine geeignete Faktorisierung von f , da p1 = an −1 f irreduzibel und normiert
ist.
Ist f reduzibel, dann existieren zwei Polynome g und h mit deg g, deg h < n.
Nach der Induktionsannahme können wir g und h in der Form
g = c 1 · p1 · . . . · p r
urf
h = c 2 · q1 · . . . · q s
zerlegen, mit c1 , c2 ∈ K, pi und qj normiert und irreduzibel. Wir erhalten
daraus die Darstellung
f = (c1 · c2 ) · p1 · . . . · pr · q1 · . . . · qs .
Zum Nachweis der Eindeutigkeit der Zerlegung nehmen wir an, wir hätten
zwei derartige Zerlegungen,
f = c 1 · p1 · . . . · p r = c 2 · q1 · . . . · q s .
Ent
w
Die Konstanten c1 und c2 sind gleich, da die Polynome pi und qj alle normiert
sind. Es gilt daher
an = c 1 = c 2 .
Das Polynom p1 ist in der ersten Zerlegung enthalten, deshalb gilt p1 | f . Es
folgt
p1 | q 1 · . . . · q s .
Wegen Satz 3.66 gibt es ein j mit p1 | qj . Das Polynom qj ist aber irreduzibel,
deshalb gilt p1 ∼ qj . Da p1 und qj normiert sind, gilt sogar Gleichheit, p1 = qj .
Sei o.B.d.A. j = 1, ansonsten numerieren wir die Faktoren einfach um. Wir
erhalten die Gleichung
p2 · . . . · p r = q 2 · . . . · q s .
Indem wir dieses Verfahren fortsetzen, erhalten wir schließlich die Aussage
116
3 Ringe, Schiefkörper und Körper
r = s
{p1 , p2 , . . . , pr } = {q1 , q2 , . . . , qr } .
und
1.5
Die Zerlegung in normierte irreduzible Polynome ist also eindeutig bis auf
die Reihenfolge der Faktoren.
2
Algorithmen zur Berechnung der Zerlegung sind nur im Falle endlicher
Körper K bekannt. Ein Beispiel dafür ist der “Berlekampsche Algorithmus”.
Für Details siehe Lidl, R. and Pilz, G.: “Applied Abstract Algebra”, 2nd
edition. Springer Verlag, New York 1998.
3.4 Endliche Körper
Wir möchten im Kopf und/oder im Computer binäre Wörter a und b einer
festen Länge m addieren und multiplizieren können. Wir wollen mit diesen
Binärstrings ähnlich rechnen können, wie wir es von den rationalen oder
reellen Zahlen gewohnt sind. Unser Ziel ist es also, mit diesen Strings arithmetische Operationen durchzuführen.
urf
Typische Werte für die Länge m sind in der Praxis m = 32, 64 und m =
128, denken Sie dabei an die 32-Bit oder 64-Bit Prozessoren von PC’s und
Workstations oder die 8-Bit Prozessoren von Chipkarten.
Wie addiert und multipliziert man nun zwei Strings a = (a0 , a1 , . . . ,am−1 )
und b = (b0 , b1 , . . . , bm−1 ), ai , bi ∈ {0, 1}? Das Konzept für die Addition ist
einfach. Wir gehen vom Körper (Z2 , +, ·) aus und betrachten das m-fache
direkte Produkt der additiven Gruppe (Z2 , +),
× Z2 · · · × Z 2 .
Zm
2 = Z
{z
}
|2
m Faktoren
Ent
w
Dann ist (Zm
2 , +) eine abelsche Gruppe, siehe Lemma 2.91 und Definition
2.92. Zwei Elemente a = (a0 , a1 , . . . , am−1 ) und b = (b0 , b1 , . . . , bm−1 ) von
Zm
2 werden wie folgt addiert:
(a0 , a1 , . . . , am−1 )
{z
}
|
a
+ (b0 , b1 , . . . , bm−1 )
{z
}
|
b
= (a0 + b0 , a1 + b1 , . . . , am−1 + bm−1 ) .
|
{z
}
a+b
An Stelle der Restklassen 0 und 1 modulo Zwei schreiben wir kurz 0 und 1,
wobei dann 0 + 0 = 0, 0 + 1 = 1 + 0 = 1 und 1 + 1 = 0 gilt. Damit ist klar,
dass die oben definierte Addition nichts Anderes als das in der Informatik
wohlbekannte XOR der beiden Strings a und b ist.
3.4 Endliche Körper
117
1.5
Wie sollen wir nun das Produkt a · b von zwei Binärstrings a und b erklären?
Wir interpretieren den String a = (a0 , a1 , . . . , am−1 ) als das Polynom
a = a0 + a1 X + · · · + am−1 X m−1
über dem Körper (Z2 , +, ·), siehe dazu Lemma 3.47. Ebenso interpretieren
wir b = (b0 , b1 , . . . , bm−1 ),
b = b0 + b1 X + · · · + bm−1 X m−1 .
Dann ist das Produkt der beiden Polynome a und b definiert und es gilt nach
den Rechenregeln für Polynome in Z2 [X] die Beziehung
a · b = a0 b0 + (a1 b0 + a0 b1 )X + . . . + am−1 bm−1 X 2m−2 .
Diesem Produktpolynom entspricht der Binärstring
(a0 b0 , a1 b0 + a0 b1 , . . . , am−1 b0 + · · · + a0 bm−1 , . . . , am−1 bm−1 ).
urf
Wir haben mit diesem Trick, die beiden Binärstrings a und b als Polynome
zu interpretieren und diese Polynome miteinander zu multiplizieren, einen
Binärstring der Länge 2m − 1 erhalten. Unser Ziel ist es aber, das Produkt
von a und b so zu definieren, dass sich wieder ein Binärstring der Länge m
ergibt. Wir möchten ja eine Multiplikation auf Zm
2 erhalten.
Ent
w
Die Lösung dieser Aufgabe ist einfach und dem modularen Rechnen mit ganzen Zahlen abgeschaut. Seien a und b zwei ganze Zahlen. Beide sollen in
der Menge {0, 1, . . . , p − 1} liegen, wobei p ∈ Z, p prim, der Modul sei. Wie
berechnen wir die ganze Zahl ab (mod p)? Sei konkret p = 11, a = 5 und
b = 7. Wir müssen das Produkt ab modulo der Zahl p reduzieren, im Beispiel
also die Zahl 35 (mod 11) = 2 berechnen. Wie führen wir diese Reduktion
konkret durch? Dazu benützen wir die Division mit Rest, wir dividieren die
ganze Zahl ab durch den Modul p. Der auftretende Rest r ergibt dann die
Lösung. Wir beachten in diesem Zusammenhang, dass (Zp , +, ·) ein Körper
ist und dass Zp = Z/hpi gilt (siehe dazu Definition 3.31).
Die gleiche Idee können wir bei der Reduktion von Polynomen durchführen.
Auch in Z2 [X] steht uns die Division mit Rest zur Verfügung. Wir reduzieren
also das Produktpolynom a·b modulo einem irreduziblen Polynom vom Grad
m, mittels der Division mit Rest. Sei dazu
f = t 0 + t1 X + · · · + t m X m
ein fest gewähltes irreduzibles Polynom aus Z2 [X] vom Grad m. Dann existiert ein eindeutig bestimmtes Polynom c ∈ Z2 [X] vom Grad kleiner oder
gleich m − 1, sodass gilt:
a·b≡c
(mod f ).
118
3 Ringe, Schiefkörper und Körper
1.5
Diesen Rest c des Polynoms a · b bei der Division durch f definieren wir als
das Produkt der beiden Polynome a und b. Da das Polynom c einen Grad
kleiner oder gleich m − 1 besitzt, hat es die Gestalt
c = c0 + c1 X + · · · + cm−1 X m−1 .
Es entspricht also dem Binärstring
c = (c0 , c1 , . . . , cm−1 ).
Dieser Binärstring ist das gesuchte Produkt der beiden Binärstrings a und b.
Zusammengefasst:
Das Produkt a · b zweier Binärstrings a und b der Länge m wird als jener
Binärstring c der Länge m definiert, der sich ergibt, wenn man die beiden
durch a und b definierten Polynome miteinander multipliziert und das Produktpolynom modulo einem gegebenen irreduziblen Polynom vom Grad m
reduziert.
urf
Bemerkung 3.71 Wenn wir auf Zm
2 eine Multiplikation definieren wollen,
dann müssen wir als Erstes das irreduzible Polynom f vom Grad m wählen.
Die Irreduzibilität des Polynomes f ist eine wesentliche Voraussetzung, auf
die nicht verzichtet werden kann. Das Interessante an dieser Vorgangsweise
ist die Tatsache, dass aus der Irreduzibilität von f die Körpereigenschaft für
(Zm
2 , +, ·) folgt. Man kann zeigen:
m
Elementen.
• (Zm
2 , +, ·) ist ein Körper mit 2
• Jeder Körper mit 2m Elementen ist zu diesem Körper isomorph.
• Eine andere Wahl des irreduziblen Polynoms führt zu einem isomorphen
Körper.
Ent
w
• Die Einschränkung auf Z2 ist hier unwesentlich, wir können diese Art von
Arithmetik über jedem Grundkörper Zp , p prim, definieren.
Das Standardwerk zu dieser “Theorie der endlichen Körper” ist das Buch
R. Lidl and H. Niederreiter. Finite Fields. Addison-Wesley, 1983.
Dieses Buch enthält nicht nur die gesamte Theorie, sondern auch umfangreiche Tabellen irreduzibler Polynome.