B. Fehlerrechnung
Werbung

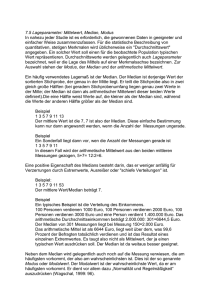
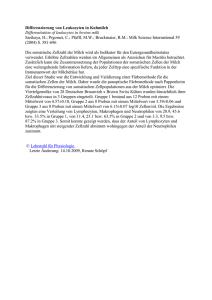
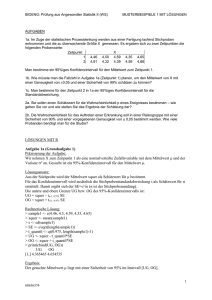
B. Fehlerrechnung 1. Einleitung 1.1. Vorbemerkung über Taschenrechner Bei der Auswertung eines Versuchs geht es meistens darum, gemessene physikalische Größen in eine Formel einzusetzen, um daraus das Versuchsergebnis zu berechnen. Eine weitere Aufgabe besteht darin, aus den Fehlern der gemessenen Größen auf die Genauigkeit des Ergebnisses zu schließen. Häufig wird eine einzelne Größe mehrmals gemessen, um den Einfluß zufälliger Meßfehler möglichst gering zu halten. Das damit verbundene Zahlenrechnen wird durch einen Taschenrechner erheblich vereinfacht. Für einige Versuche braucht man außerdem die Zahlenwerte von Funktionen wie sin x, cos x, tan x, der Exponentialfunktion exp x und ihrer Umkehrfunktion ln x. Taschenrechner mit diesen Eigenschaften werden von den Herstellern als wissenschaftliche Taschenrechner bezeichnet. Leider fehlt diesen Rechnern oft eine Betriebsart, die mit Statistikmodus bezeichnet wird. In dieser Betriebsart läßt sich u.a. der Wert der Streuung ∆x nach Gl.(2.2), Seite B.3, besonders einfach berechnen. Daher wird jeder Zweiergruppe für die Dauer eines Versuchsnachmittages ein solcher Taschenrechner mit statistischen Funktionen leihweise zur Verfügung gestellt. Fragen zum Umgang mit Ihren eigenen Taschenrechnern beantworten Ihnen die Assistenten. Dazu sollten Sie möglichst die Gebrauchsanleitung Ihres Rechners mitbringen. 1.2. Fehlerrechnung im Physikpraktikum Eine Größe zu messen bedeutet, ihrer Maßeinheit einen Zahlenwert zuzuordnen. Solange Messungen von unvollkommenen Menschen mit unvollkommenen Meßapparaturen vorgenommen werden, wird dem Ergebnis einer Messung immer ein gewisser Grad von Unsicherheit anhaften. Diese Unsicherheit, d.h. die Gesamtheit der Meßfehler, möglichst klein zu halten, ist die Grundaufgabe der Meßtechnik. In einem Anfängerpraktikum der Physik - und nicht nur in einem solchen für Medizinstudenten - sollen die Studenten lernen, ihre eigenen Messungen kritisch zu betrachten und entsprechend auszuwerten. Man unterscheidet zwei Arten von Fehlern: systematische und zufällige. Systematische Fehler haben im wesentlichen zwei Ursachen: fehlerhafte Meßgeräte einerseits und andererseits sich während der Messung in bestimmter Richtung vollziehende Änderungen in der zu messenden Größe selbst. Dazu je ein Beispiel: Die Messung einer elektrischen Spannung mit einem fehlerhaft geeichten Voltmeter wird stets zu große oder zu kleine Werte liefern. Oder: Mißt man eine stark temperaturabhängige Größe (wie etwa die Zähigkeit einer Flüssigkeit) über einen längeren Zeitraum, in dem die Raumtemperatur und damit auch die Flüssigkeitstemperatur langsam zunehmen, so werden die Meßergebnisse sich zunehmend nach einer Richtung hin verändern. Typisch für systematische Fehler ist also stets, daß sie die Meßergebnisse in eine bestimmte Richtung hin verfälschen. Zufällige Fehler haben dagegen keine Vorzugsrichtung. Ihre Ursachen liegen teils beim Experimentator, der beim Ablesen von Instrumentenanzeigen oder beim Einstellen von Meßparametern kleine Fehler begeht, teils in kleinen Unregelmäßigkeiten im Verhalten der Meßapparaturen und manchmal auch in gewissen Schwankungen im Meßobjekt selbst, typisches Beispiel: die völlig statistische, d.h. dem Zufall unterworfene Abfolge der Zerfallsakte in einer radioaktiven Substanz. Zufällige Fehler sind unvermeidlich: Soweit sie beim Experimentator liegen, kann er nur versuchen, sie möglichst klein zu halten. Systematische Fehler auszuschalten, kann schwierig und zeitraubend sein. Man ignoriert daher in einem Anfängerpraktikum mögliche systematische Fehler und befaßt sich nur mit den zufälligen Fehlern. B. 1 1.3. Normalverteilungsgesetz der Beobachtungsfehler Meßgrößen x mit rein zufälligen Fehlern sind im allgemeinen normalverteilt und folgen einer sog. Normal- oder Gauß-Verteilung ϕ(x) (Abb. 1.1). Die Häufigkeitsfunktion enthält zwei Parameter, den Erwartungswert oder Mittelwert x , um den herum die Daten symmetrisch streuen und die sog. Streuung σ , auch Standardabweichung genannt. Den Mittelwert x findet man im Maximum der Gauß-Kurve, die Streuung σ am rechten und linken Wendepunkt der Kurve. Die Wahrscheinlichkeit P(x) dafür, daß ein Meßwert x zwischen den Grenzen x = a und x = b liegt, entspricht der Fläche unter der ϕ(x)-Kurve in diesen Grenzen. Für die Grenzen a = + ∞ und b = − ∞ folgt P(x) = 1, d.h. es wurden alle Meßwerte erfaßt. Bereits in einem Intervall von G 3 * σ werden 99,7 % der Meßwerte x erfaßt. Die Meßunsicherheit entspricht dem zufolge nur 0,3 %. Abb. 1.1. Glockenkurve der Gauß-Verteilung B. 2 2. Das arithmetische Mittel, absoluter und prozentualer Fehler der Einzelmessungen, Genauigkeitsabschätzungen 2.1. Der Mittelwert Als Folge der unvermeidlichen zufälligen Fehler wird die n-fache Wiederholung der Messung einer Größe x stets n mehr oder weniger voneinander verschiedene Meßergebnisse x1, x2, ...., xn liefern. Als durchschnittlichen oder wahrscheinlichsten Wert des Ergebnisses unserer wiederholten Messungen wählen wir den sog. Arithmetischen Mittelwert x aus den n Meßergebnissen: (x + x 2 + .... + x n ) 1 n x= 1 = ⋅ ∑ xi (2.1) n n i =1 Das große griechische Sigma als Summensymbol dient nur zur Verkürzung beim Schreiben von Summenausdrücken. Multipliziert man (2.1) mit n und bringt die Summe auf die linke Seite, so erhält man nach Auflösung der Klammer und Umordnen: n (x − x 1 ) + (x − x 2 ) + .... + (x − x n ) = ∑ (x − x i ) =0 i =1 Der Mittelwert x hat also die Eigenschaft, daß die Summe über alle Abweichungen (x − x i ) der Einzelmessung xi vom Mittelwert gleich Null wird. 2.2. Der mittlere absolute Fehler (der Einzelmessung) Der Mittelwert allein sagt noch nichts über die Genauigkeit der Messungen aus, die zu diesem Mittelwert geführt haben. Wir betrachten die beiden folgenden Meßreihen: Zwei Studenten A und B haben siebenmal die Durchflußzeit t einer bestimmten Wassermenge durch eine Kapillare gemessen. Die dazu benutzte digitale Stoppuhr konnte auf Hundertstelsekunden abgelesen werden: A B t1 12,60 s 12,36 s t2 12,18 s 12,29 s t3 12,39 s 12,38 s t4 12,87 s 12,28 s t5 12,05 s 12,37 s t6 11,91 s 12,40 s t7 12,42 s 12,34 s Ein Taschenrechner mit achtstelliger Anzeige liefert zwar für beide Meßreihen den gleichen Mittelwert: t = 12,345714 s, aber man sieht, daß die Schwankungen der Einzelmessungen um den Mittelwert bei A merklich größer sind als bei B. Wir betrachten demnach außer dem Mittelwert noch eine Größe, die etwas über die Größenordnung der Streuung der Meßwerte um den Mittelwert herum, also über die Genauigkeit der Messungen, aussagt. B. 3 Nennen wir die Meßwerte wieder xi , i = 1, 2, .. n, und den Mittelwert x . Die Abweichungen (x − x i ) eignen sich offensichtlich nicht für unseren Zweck, da ihre Summe - siehe oben stets gleich Null ist. Wir betrachten stattdessen die Quadrate der Abweichungen, (x − x i )2 . Dies sind stets positive Zahlen, und damit ist auch ihre Summe von i = 1 bis i = n positiv. Wir nennen (x − x 1 )2 + (x − x 2 )2 + .... + (x − x n )2 1 n 2 s = = ⋅ ∑ (x − x i ) n n i =1 die mittlere quadratische Abweichung (der Meßwerte vom Mittelwert). Sie könnte als Maß für die Genauigkeit einer Meßreihe benutzt werden, wenn sie nicht einen Schönheitsfehler besäße: Mit dem Quadrieren der (x − x i ) quadriert sich auch die Einheit der physikalischen 2 Größe x. So ergibt sich für unsere beiden obigen Meßreihen s in (Sekunden) : A 2 s = 0,09311021 s B 2 0,00176735 s Um ein Genauigkeitsmaß zu erhalten, das die gleiche Einheit wie die Meßgröße besitzt, bildet man die Wurzel aus s . Definition: Der Ausdruck n ∑ (x − x i )2 ∆x = i =1 (n −1) (2.2) wird mittlerer absoluter Fehler der Einzelmessungen xi , auch Standardabweichung oder kurz Streuung genannt. Es fällt auf, daß ∆x sich von der Wurzel aus s dadurch unterscheidet, daß die Summe der Abweichungsquadrate nicht durch n, sondern durch (n − 1) dividiert wird. Damit hat es folgende Bewandtnis: Die einmalige Messung einer Größe erlaubt keinerlei Aussage über irgendeine Streuung, das ist erst von der zweiten Messung an möglich. (n − 1) ist daher die Anzahl der Kontrollmessungen, die zur Beurteilung der Streuung vorgenommen worden sind. Bei einer großen Zahl von Messungen ist es relativ unerheblich, ob man in Gl.(2.2) durch n oder (n − 1) dividiert. Durch die Zahl (n − 1) im Nenner wird aber sichergestellt, daß bei einer einzigen Messung keine sinnlose Angabe über die Streuung aus Gl.(2.2) gewonnen werden kann; denn für n = 1 steht in Gl.(2.2) unter der Wurzel der unbestimmte Ausdruck 'Null dividiert durch Null'. Statt ∆x findet man auf Tastaturen von Taschenrechnern meist die Bezeichnung σ, σn − 1 , oder s oder s n – 1 . 2.3. Der prozentuale Fehler Das Adjektiv 'absolut' in der Bezeichnung von ∆x bedeutet nur, daß die Streuung ∆x die gleiche Maßeinheit wie der Mittelwert besitzt. Häufig ist es anschaulicher und - wie man in Abschnitt 3 sehen wird - vorteilhafter, wenn man statt des absoluten Fehlers angibt, wieviel Prozent vom Mittelwert x der Fehler ∆x ausmacht. Dazu berechnet man aus x und ∆x den sog. relativen Fehler r(x), wobei x und ∆x die gleiche Einheit besitzen müssen: ∆x r (x ) = (2.3) x Aus dem relativen Fehler erhält man durch Multiplikation mit 100 und Anhängen des Prozentzeichens den prozentualen Fehler p(x): B. 4 p(x ) = 100 ⋅ r (x ) % = 100 ⋅ ∆x % x (2.4) Relativer und prozentualer Fehler sind reine Zahlen, sie besitzen keine Maßeinheit mehr (sie hat sich bei der Bildung des Verhältnisses ∆x x 'herausgekürzt'). Das Prozentzeichen ist keine Maßeinheit, es erinnert nur daran, daß das ursprüngliche Verhältnis zweier Größen mit der Zahl 100 bzw. mit 100 % multipliziert wurde. Ist umgekehrt der prozentuale Fehler p(x) von x bekannt, kann man aus Gl.(2.4) den mittleren absoluten Fehler ∆x berechnen: ∆x = p (x ) ⋅ x 100 (2.5) (Prozentzeichen stehen bei p(x) und bei 100, sie kürzen sich also heraus.) Wir berechnen jetzt mit Gln.(2.2) und (2.4) den absoluten und den prozentualen Fehler aus den beiden Meßreihen A und B, wobei wir zunächst noch die volle Stellenzahl der Taschenrechneranzeige niederschreiben (der Mittelwert betrug in beiden Fällen t = 12,345714 s): A ∆t : p(t) : 0,3295885 s 2,6696591 % B 0,0454082 s 0,3678054 % . Aus beiden Angaben ist eindeutig die größere Genauigkeit der Meßreihe B ersichtlich. Es gibt nun zwei Möglichkeiten, Mittelwert und Fehler anzugeben, einmal unter Benutzung des absoluten, zum andern des prozentualen Fehlers, wobei die Fehler jeweils mit ± an den Mittelwert angehängt werden: (x ± ∆x ) [Einheit] oder x [Einheit] ± p(x) [%] . Die Angabe des prozentualen Fehlers ist anschaulicher und sollte daher bevorzugt benutzt werden. Die Kenntnis von ∆x ist notwendig, um eine sinnvolle Rundung des Mittelwerts vornehmen zu können. Außerdem gilt, was hier allerdings nicht bewiesen werden kann: Bei einer sehr großen Anzahl n von Einzelmessungen liegen etwa zwei Drittel der Meßwerte x im Intervall zwischen x = x − ∆x und x = x + ∆x , und nahezu 100% zwischen x = x − 3 ⋅ ∆x und x = x + 3 ⋅ ∆x . 2.4. Signifikanz von Messwertabweichungen Es kommt vor, daß dieselbe physikalische Größe durch unterschiedliche Meßmethoden oder unabhängig von verschiedenen Arbeitgruppen gemessen wurde. In solchen Fällen stellt sich die Frage, ob die Ergebnisse derartiger Messungen miteinander verträglich sind. Da jede Messung fehlerbehaftet ist, müssen zur Beantwortung dieser Fragestellung die Mittelwerte zusammen mit den entsprechenden Fehlergrößen betrachtet werden. Die Abweichung der Ergebnisse zweier Meßreihen A und B für dieselbe physikalische Größe x soll dann als signifikant definiert werden, wenn die Differenz der beiden Mittelwerte x A und x B dem Betrage nach größer ist als die Summe der zugehörigen absoluten Fehler ∆x A bzw. ∆x B , wenn also gilt: x A − x B > ∆x A + ∆x B Als häufigste Ursache für signifikant unterschiedliche Meßergebnisse kommen systematische Fehler in Betracht. B. 5 2.5. Über eine sinnvolle Rundung von Fehler und Mittelwert Der Taschenrechner betrachtet die Gleichungen (2.1) und (2.2) als rein numerische Aufgaben und berechnet daher die Werte von x und ∆x (und daraus p(x)) mit der größten ihm möglichen Genauigkeit, auf acht Stellen bei den im Praktikum ausgegebenen, auf bis zu zwölf Stellen bei teureren Taschenrechnern. Es ist aber ohne weiteres einzusehen, daß beim Übergang von einem Rechner zum anderen das Ergebnis einer physikalischen Messung nicht plötzlich um vier Stellen genauer werden kann. Damit stellt sich die Frage, wie viele Stellen der Taschenrechneranzeige bei der Auswertung von Meßreihen 'mitgenommen' werden müssen oder dürfen. 2.5.1. Rundung des absoluten und des prozentualen Fehlers Da der absolute Fehler ∆x ein Maß für die Streuung der Meßwerte xi um den Mittelwert x und damit für die Genauigkeit der Messungen darstellt, wäre es unsinnig, alle Stellen der Taschenrechneranzeige für ∆x mitzunehmen. Es ist durchgängig üblich, ∆x auf zwei zählende bzw. 'signifikante' Stellen zu runden. Unter der ersten signifikanten Ziffer einer Zahl versteht man die erste Ziffer einer Zahl in Dezimalschreibweise, wenn die Zahl eine oder mehrere Stellen vor dem Komma besitzt, und die erste von Null verschiedene Ziffer einer Zahl, wenn diese mit 0,... beginnt. Die zweite signifikante Ziffer ist die auf die erste signifikante Ziffer folgende Ziffer, wobei die zweite signifikante Ziffer - im Gegensatz zur ersten - durchaus auch eine Null sein kann. Einige Beispiele, wobei darauf verzichtet wurde, hinter die einzelnen Zahlen jeweils eine physikalische Einheit zu setzen: Zahl: 1) 2) 3) 4) 5) Rundung auf zwei signifikante Stellen: ⇒ ⇒ ⇒ ⇒ ⇒ 1,7 22 0,054 0,010 0,0099 -5 ⇒ 1,9 ⋅10 −5 4 ⇒ 2,0 ⋅10 4 (nicht 2 · 10 !) ⇒ 4,2 ⋅10 3 (statt 4200) 1,7389205 21,837456 0,0544791 0,0099843 0,0099437 6) 1,937412 · 10 7) 1,995412 · 10 8) 4186 (nicht 0,01 !) 4 Im 4. und 7. Beispiel mußte wegen der Ziffernfolgen 998 bzw. 995 über drei Stellen hinweg aufgerundet werden. Im 8. Beispiel bevorzugt man die Schreibweise 4,2 ⋅10 3 . Mathematisch stellen 4,2 ⋅10 3 und 4200 die gleiche Zahl dar, aber die Schreibweise 4200 könnte zu der falschen Annahme verführen, hier sei eine Zahl mit vier signifikanten Stellen gemeint. Für den prozentualen Fehler p(x) gilt wie für den absoluten Fehler ∆x : Prozentuale Fehler sind stets auf zwei signifikante Stellen zu runden. Beispiele erübrigen sich; denken Sie sich einfach hinter die Zahlen der Beispiele 1, 3, 4, oder 5 ein Prozentzeichen gesetzt. Daß die Rundung absoluter und prozentualer Fehler auf genau zwei signifikante Stellen keine willkürliche, sondern eine sinnvolle Vorschrift ist, entnehmen Sie bitte dem Beispiel unter Punkt 1 des Vorsatzblattes auf der ersten Seite Ihres Protokollheftes. Rundung auf nur eine signifikante Stelle kann unter Umständen zu einer falschen Beurteilung der Genauigkeit einer Messung führen; die Mitnahme einer dritten B. 6 urteilung der Genauigkeit einer Messung führen; die Mitnahme einer dritten signifikanten Stelle führt im allgemeinen zu keinen tieferen Einsichten bei der Beurteilung der Größe der Streuung und ist daher überflüssig. 2.5.2. Die richtige Rundung des Mittelwerts Wie viele Stellen der Taschenrechneranzeige des Mittelwerts mitzunehmen sind, hängt ausschließlich von der Größe des absoluten Fehlers ab. Liefert der Taschenrechner etwa x = 3,4257095 [Einheit], und beträgt der auf zwei signifikante Stellen gerundete absolute Fehler ∆x = 0,042 [Einheit], so ist folgendes zu bedenken: Der Mittelwert ist auf der zweiten und dritten Stelle nach dem Komma um ± 42 Tausendstel der Einheit unsicher. Dann ist es sinnlos, im Mittelwert den auf die dritte Stelle nach dem Komma folgenden Ziffern 7,0,9 und 5, also den Zehntausendsteln bis Zehnmillionsteln der Einheit, eine physikalische Bedeutung geben zu wollen; oder anders ausgedrückt: In unserem Beispiel hat es keinen Sinn, den Mittelwert auf mehr als ein Tausendstel der Einheit anzugeben, da der absolute Fehler bereits 42 Tausendstel der Einheit beträgt. Das führt zu folgender Regel: Der Mittelwert x ist auf diejenige Stelle zu runden, die der zweiten signifikanten Stelle des absoluten Fehlers entspricht. Wem die Anwendung dieser Regel Schwierigkeiten bereitet, wird folgendes Vorgehen empfohlen: Schreiben Sie Mittelwert und absoluten Fehler so untereinander, daß die Kommata an der gleichen Stelle stehen: x = 3,425|7095 [Einheit] ∆x = 0,042| [Einheit] Man erkennt jetzt sofort, daß x auf die dritte Stelle nach dem Komma zu runden ist, und zwar muß in unserem Beispiel wegen der 7 auf der vierten Stelle aufgerundet werden. Damit haben wir ein Ergebnis, bei dem die Stellenzahl des Mittelwerts in sinnvoller Weise der Genauigkeit der Messung entspricht: x = (3,426 ± 0,042) [Einheit]. Berechnet man hieraus den prozentualen Fehler (Taschenrechneranzeige 1,2259194), so kann man nach der Rundung das Ergebnis auch in der Form x = 3,426 [Einheit] ± 1,2 % angeben. Die Regel über die Rundung des Mittelwerts setzt zweierlei voraus: 1.) x und ∆x müssen die gleiche Einheit besitzen, es darf also nicht etwa x in cm und ∆x in mm angegeben sein. In einem solchen Fall muß auf die gleiche Einheit umgerechnet werden. 2.) Falls der Taschenrechner x und ∆x als Zahlen mit verschiedenen Zehnerpotenzen ausgibt, muß man sich vor der Rundung des Mittelwerts auf eine gemeinsame Zehnerpotenz einigen. B. 7 −4 x = 9,1184057 · 10 [Einheit] −6 ∆x = 3,4567123 · 10 [Einheit] Beispiel: ∆x ⇒ x ⇒ −4 0,035 · 10 −4 9,118 · 10 [Einheit] [Einheit] p(x) = 0,38 % 2.5.3. Zusammenfassung Trotz der Einfachheit der Regeln über die Rundung von Fehler und Mittelwert treten dabei in den Versuchsauswertungen erfahrungsgemäß immer wieder falsche Ergebnisse auf. Gehen Sie daher ausnahmslos in jedem Fall wie folgt vor: Regel 1: Bevor Sie mit der Rundung beginnen, schreiben Sie sämtliche Stellen der Taschenrechneranzeige sowohl für x als auch für ∆x in Ihr Protokollheft nieder. Erst dann wird gerundet: Regel 2: Absolute und prozentuale Fehler sind stets auf zwei signifikante Stellen zu runden. Regel 3: Der Mittelwert ist immer auf die Stelle zu runden, die der zweiten signifikanten Stelle des absoluten Fehlers entspricht. Als Folge davon: Falls außer dem Mittelwert nur der prozentuale Fehler vorliegt, muß erst der absolute Fehler nach Gl.(2.5) berechnet (und gerundet!) werden, bevor man den Mittelwert runden kann. Wendet man diese drei Regeln auf die Meßreihe B (Seite B.2) an, so hat im Protokollheft zu stehen: (t : 12,345714 s), (∆t : 0,0454082 s), ∆t = 0,045 s , p(t) = 0,37 %, ⇒ t = 12,345|714 s, ∆t = 0,045| t = 12,346 s s, ⇒ Regel 1 ⇒ Regel 2 ⇒ Regel 3 Schließlich protokolliert man mit Fehlerangabe wahlweise: t = 12,346 s ± 0,37 % oder B. 8 t = (12,346 ± 0,045) s. 2.5.4. Genauigkeitsabschätzungen Häufig werden im Verlauf eines Versuchs physikalische Größen nur einmal gemessen, so daß keine Fehlerrechnung in der bisher beschriebenen Weise durchgeführt werden kann. In solchen Fällen muß eine Genauigkeitsabschätzung vorgenommen werden, die dann im weiteren als Fehlerangabe verwendet wird. Beispiel: Die Bestimmung der Länge s einer Glaskapillare mit einem Längenmaßstab kann wegen der Abschmelzung an den Enden höchstens auf 1 Millimeter genau erfolgen. Dann ist z.B. zu protokollieren: s = (15,4 ± 0,1) cm. Hier darf man sich also ausnahmsweise auf die Angabe einer signifikanten Stelle für den absoluten Wert ∆s der Abschätzung beschränken. Den daraus berechneten prozentualen Fehler p(s) gibt man dann wieder auf zwei signifikante Stellen an: s = 15,4 cm ± 0,65 % . Es gilt also: Regel 4: Wird eine Größe a im Verlauf eines Versuchs nur einmal gemessen, muß in jedem Fall eine Genauigkeitsabschätzung vorgenommen werden. Diese Abschätzung wird dann als absoluter Fehler ∆a von a betrachtet. 3. Fehlerfortpflanzung Oft besteht die Aufgabe eines Versuchs darin, eine physikalische Größe E, die nicht direkt gemessen werden kann, anhand einer Gleichung E = f (a, b, c, ...) (3.1) aus einer Reihe anderer physikalischer Größen a, b, c, ... zu berechnen. Diese Größen a, b, c sind während des Versuchs gemessen worden und besitzen demnach bestimmte Fehler ∆a, ∆b, ∆c, ... Die Querstriche über den Meßgrößen a, b, c, ... zur Kennzeichnung des Mittelwerts werden von jetzt an weggelassen, weil einige dieser Größen evtl. durch eine einzelne Messung ermittelt wurden und ihre Fehler daher aus einer Genauigkeitsabschätzung stammen. (In Gl.(3.1) auftretende Konstanten behandelt man bei Überlegungen zur Fehlerfortpflanzung am einfachsten wie Meßgrößen mit dem absoluten Fehler Null.) Das Problem der Fehlerfortpflanzung läuft auf die Beantwortung folgender Frage hinaus: Wie groß ist der Fehler ∆E. der Ergebnisgröße E aus Gl.(3.1), wenn die Größen a, b, c, .... die Fehler ∆a, ∆b, ∆c, .... besitzen Wenn der Zusammenhang (3.1) zwischen E und a, b, c, ... eine mathematisch komplizierte Form hat, wird auch die Ermittlung von ∆E aus den ∆a, ∆b, ∆c, ... entsprechend schwierig sein. Wir geben daher keine allgemeine Lösung des Fehlerfortpflanzungsproblems, sondern beschränken uns auf die in der Praxis am häufigsten auftretenden Fälle. B. 9 3.1. Der Fehler von Summe und Differenz zweier Größen Der einfachste Zusammenhang zwischen zwei Größen a und b mit den absoluten Fehlern ∆a und ∆b ist ihre Summe oder ihre Differenz. Zunächst die Summe: E ± ∆E = (a + b) ± ∆(a + b). E = a + b, (3.2) Wie errechnet sich ∆E = ∆(a + b) aus den bekannten ∆a und ∆b? E ± ∆E = (a ± ∆a) + (b ± ∆b) = (a + b) ± ∆a ± ∆b ± ∆(a + b) = ± ∆a ± ∆b. Vergleich mit Gl.(3.2): Die rechte Seite kann man so deuten: Die beiden Einzelfehler können entweder in der gleichen Richtung wirken oder sich ganz oder teilweise aufheben. Dann wäre der größtmögliche Fehler: ∆(a + b)max = ∆a + ∆b, und der kleinstmögliche Fehler: ∆(a + b)min = ∆a − ∆b . Hier muß das Betragszeichen stehen, da ∆(a + b) eine positive Zahl sein soll, die anschließend mit ± an das Ergebnis (a + b) angehängt wird. Der wahrscheinlichste Wert für ∆(a + b) dürfte zwischen Größt- und Kleinstfehler liegen. Seine Berechnung ist jedoch umständlich. Wir vereinfachen daher: Regel 5: Bei allen Problemen der Fehlerfortpflanzung wird stets der Größtfehler angegeben. Für die Summe E = (a + b) zweier Größen bedeutet das also: ∆(a + b) = ∆a + ∆b. (3.3a) Für die Differenz E = a − b ergibt sich: E ± ∆E = (a − b) ± ∆(a - b) = (a ± ∆a) - (b ± ∆b) = (a − b) ± ∆a + ∆b Unabhängig von der Abfolge von ± und + ist auch hier der Größtfehler ∆a + ∆b, also: ∆(a − b) = ∆a + ∆b ( = ∆(a + b) ). (3.3b) Satz 1: Der absolute Größtfehler der Summe oder der Differenz zweier Größen ist gleich der Summe der Einzelfehler. Die prozentualen Fehler von Summe und Differenz berechnen sich aus Gl.(2.4) und den Gln.(3.3a) und (3.3b): p(a + b) = 100 ⋅ (∆a + ∆b ) % ; a+b p(a − b) = 100 ⋅ B. 10 (∆a + ∆b ) % a−b (3.3c) Im Nenner stehen wieder die Beträge von ( a + b ) und ( a − b ), da die prozentualen Fehler positive Zahlen sind, die mit ± angehängt werden. 3.2. Die prozentualen Fehler von Produkten, Quotienten und Potenzen Bei Produkten und Quotienten zweier Größen erhält man einfache Regeln, wenn man von den prozentualen Fehlern ausgeht. Liegen für a und b nur die absoluten Fehler ∆a und ∆b vor, sind zunächst p(a) und p(b) nach Gl.(2.4) zu bestimmen. Es gelten: Satz 2: Der prozentuale Größtfehler des Produkts zweier Größen ist gleich der Summe der prozentualen Fehler der Einzelgrößen. Satz 3: Der prozentuale Größtfehler des Quotienten zweier Größen ist ebenfalls gleich der Summe der prozentualen Fehler der Einzelgrößen. Satz 2 und Satz 3 in Gleichungsform: a p(a · b) = p = p(a) + p(b). b (3.4) Setzt man im Produkt a = b, so ergibt sich aus Gl.(3.4): 2 p(a · a) = p(a ) = 2 · p(a), und die n-malige Anwendung von Regel (7) mit a = b ergibt n p(a ) = n · p(a), (3.4a) oder in Worten: Satz 4: Der prozentuale Größtfehler der n-ten Potenz einer Größe ist gleich dem n - fachen Wert ihres prozentualen Fehlers. Setzt man in Gl.(3.4) im Quotienten für den Zähler eine Konstante, also eine fehlerlose Größe ein, insbesondere die Zahl 1, so erhält man 1 p = p(b), b (3.4b) in Worten: Satz 5: Der prozentuale Größtfehler des Kehrwerts einer Größe ist gleich dem prozentualen Fehler der Größe selbst. 1 Die n-fache Anwendung von Satz 2 auf ergibt: b 1 p n = n · p(b). b B. 11 (3.4c) n Erinnert man sich daran, daß 1/b = b − n geschrieben wird, so läßt sich Gl.(3.4c) auch in der Form 1 (3.4d) p ( b − n ) = n · p = − n · p(b) schreiben. b Damit erweitert sich Satz 4 zu: Satz 6: Der prozentuale Größtfehler der n-ten Potenz einer Größe, wobei n eine positive oder negative ganze Zahl sein darf, ist gleich dem mit dem Betrag des Exponenten n multiplizierten prozentualen Fehler der Größe. n In Gleichungsform: p(a ) = n · p(a). Es läßt sich ferner zeigen, daß Satz 6 selbst dann noch zutrifft, wenn man für den Exponenten n auch echte oder unechte Brüche, also beliebige rationale Zahlen zuläßt, wobei daran erinnert wird, daß für ganzzahliges m und n a n/m 1/2 = So ist demnach p( a ) = p(a ) = m a n bedeutet. 1 · p(a). 2 3.3. Das allgemeine Potenzprodukt Hat der Ausdruck (3.1) die Form E = k · a n1 ⋅ b n 2 ⋅ c n 3 ⋅ ..... (3.5) wobei k eine Konstante und die ni positive oder negative rationale Zahlen sein mögen, so nennt man E ein Potenzprodukt aus den Größen a, b, c, ... Die Zusammenfassung der Sätze 2 bis 6 liefert dann: Satz 7: Der prozentuale Größtfehler eines Potenzprodukts aus den Größen a, b, c, .… ist gleich der Summe aus den mit dem Betrag der Exponenten multiplizierten prozentualen Fehler der Einzelgrößen. p(E) = n 1 ⋅ p(a) + n 2 ⋅ p(b) + n 3 ⋅ p(c) + ... Satz 7 als Formel: (3.6) Ein praktisches Beispiel: Für E= k⋅ a 3 ⋅ b ⋅ c 2,6 A 34 ⋅B ⋅ C 4 = k ⋅ a 3 ⋅ b1 2 ⋅ c 2 ,6 ⋅ A −3 4 ⋅ B −1 ⋅ C − 4 ergibt sich: p(E) = 3 · p(a) + 0,5 · p(b) + 2,6 · p(c) + 0,75 · p(A) + p(B) + 4 · p(C) Wir haben die Fehlerfortpflanzung in E = f (a, b, c, ...) für die Fälle E = a ± b und E = Potenzprodukt (mit seinen Spezialfällen) gesondert behandelt. Treten in E = f(a, b, c, ...) sowohl Summen bzw. Differenzen als auch Produkte, Quotienten oder Potenzen gleichzeitig auf, wird die Behandlung der Fehlerfortpflanzung schwierig. Wo bei einem Versuch ein solcher Fall auftritt, ist dort genau beschrieben, wie der Gesamtfehler zu berechnen ist. B. 12 4. Versuchsergebnisse aus Graphen Besteht zwischen einer physikalischen Größe y und einer zweiten Größe x ein sog. linearer Zusammenhang von der Form y = a · x + b, (4.1) so ist der Graph von Gl.(4.1) in einem x-y-Koordinatensystem eine Gerade mit dem Anstieg (der Steigung) a und dem y-Achsenabschnitt b. Abb.1. Punkteschar eines vermuteten linearen Zusammenhangs in der x-y-Ebene. Die Konstanten a und b sind ebenfalls physikalische Größen, deren Bedeutung aus dem Zusammenhang (4.1) folgt. Sie lassen sich graphisch aus der durch Gl.(4.1) definierten Geraden bestimmen. Prinzipiell genügt dazu die Kenntnis zweier Punkte auf der Geraden. In der Praxis ermittelt man jedoch eine größere Zahl n von Punkten, die auf der Geraden liegen, von denen demnach (n - 2) Punkte der Kontrolle dienen. Dazu mißt man für n vorgegebene Werte von x1, x2, x3, ... xn, die zugehörigen Werte von y1, y2, y3, ... yn, und trägt anschließend die Wertepaare (xi; yi), i = 1, 2, ..., n, als Punkte in das Koordinatensystem ein. Wegen der unvermeidbaren zufälligen Fehler bei den Messungen werden die Punkte Pi(xi; yi) nie genau auf einer Geraden liegen. In Abb.1. ist eine Schar von Punkten Pi(xi; yi) in ein x- y-Koordinatensystem eingezeichnet. Sie sollten theoretisch auf einer Geraden liegen, es treten jedoch erhebliche Streuungen auf. Die Aufgabe besteht nun darin, mit Hilfe eines durchsichtigen Lineals eine Gerade zu finden, die sich den Meßpunkten optimal anpaßt. Wir nennen diese Gerade die bestangepaßte Gerade g durch die vorgegebene Punkteschar und bezeichnen ihren Anstieg mit a und ihren Achsenabschnitt auf der Ordinate mit b : g : y=a⋅x+b B. 13 (4.1a) Abb.2. Bestangepaßte Gerade g durch den Schwerpunkt P einer Punkteschar, theten des Steigungsdreiecks zur Bestimmung von a Ka- 4.1. Die Eigenschaften von g In Abb.2. möge die Gerade durch die Punkteschar bereits die bestangepaßte Gerade g sein. Der Punkt auf g , der zu einem Wert xi gehört, besitzt nach (4.1a) den y-Wert y* = a ⋅ x i + b Der y-Wert des Punktes Pi mit x = xi ist aber yi und im allgemeinen von y* verschieden. Die in y-Richtung gemessene Entfernung vi eines Punktes Pi(xi ;yi ) von g beträgt vi = yi – y* = yi – ( a ⋅ x i + b ) (4.2) wobei die vi positiv oder negativ (und nur durch Zufall gleich Null) sein können. Die bestangepaßte Gerade g ist wie folgt definiert: a und g sind so zu bestimmen, daß die Summe über die Quadrate der Abweichungen vi der Meßpunkte von der Geraden g zu einem Minimum wird: n ∑ v i2 = i =1 ∑ [y i − (a ⋅ x i + b )] n 2 = Minimum ! (4.3) i =1 Diese Forderung sieht nach einer Extremwertaufgabe der Differentialrechnung aus, nur daß der Ausdruck (4.3), dessen Minimum gesucht wird, eine Funktion von zwei Veränderlichen, nämlich von a und b ist. Die exakte Lösung dieser Aufgabe, die sogenannte lineare Regression, wird neuerdings bei einigen Versuchen mit den im Praktikum erstmals zur Verfügung stehenden Computern ermöglicht. B. 14 Die Bedienung der entsprechenden Programme wird in den Versuchsanleitungen erläutert. Daneben wird die bestangepaßte Gerade mit den Parametern a und b bei anderen Versuchen weiterhin mit Hilfe eines Lineals so gut wie möglich graphisch ermittelt. Es gibt einen ausgezeichneten Punkt P , der immer auf der bestangepaßten Geraden liegt; seine Koordinaten ( x ; y ) sind die Mittelwerte der xi und der yi aller Punkte: P: x= 1 n ⋅ ∑ xi ; n i=1 y= 1 n ⋅ ∑ yi n i =1 (4.4) Dieser Punkt P heißt Schwerpunkt der gegebenen Punkteschar, in Analogie zum physikalischen Schwerpunkt von flächenhaft verteilten Massenpunkten in der Mechanik. Es gilt folgende Regel: Regel 6: Vor Eintragung einer bestangepaßten Geraden ist der Schwerpunkt P ( x ; y ) der Punkteschar nach Gl.(4.4) zu bestimmen, in das Koordinatensystem einzuzeichnen und mit P zu markieren. Dann dreht man das durch P gelegte Lineal so lange um P , bis man der Meinung ist, die Minimalbedingung (4.3) erfüllt zu haben. Besonders bei Punktescharen mit großer Streuung ist die Eintragung von P hilfreich. Achtung: Alle Geraden durch P haben die Eigenschaft, daß die Summe über alle vi nach Gl.(4.2) gleich Null wird, aber nur für eine einzige Gerade ist die Minimalbedingung (4.3) erfüllt. 4.2. Bestimmung von a und b aus der Geraden g Hat man die bestangepaßte Gerade bestimmt, ermittelt man ihren Anstieg a aus einem Steigungsdreieck, wie es in Abb.2. eingezeichnet ist. Die beiden Katheten sind ∆y und ∆x, und es folgt: ∆y (4.5) a= ∆x Da jede physikalische Beziehung nicht nur eine zwischen den Maßzahlen, sondern auch eine zwischen den Einheiten der betreffenden Größen ist, besitzt a die Einheit: [Einheit von a ] = [Einheit von y] . [Einheit von x ] Die Größe b findet man als Schnittpunkt von g mit der y-Achse, solange der Nullpunkt der x-Achse nicht unterdrückt ist. Sollte die x-Achse nicht bei Null beginnen, berechnet sich b aus den Koordinaten des Schwerpunkts und dem Anstieg a (siehe Gl.(4.1a)): b = y − a⋅x . (4.5a) Die Einheit von b ist gleich der Einheit von y . Die graphische Bestimmung von a (und entsprechend von b ) kann nur mit begrenzter Genauigkeit erfolgen: Selbst bei sorgfältiger Eintragung des Steigungsdreiecks auf Millimeterpapier besitzen die Katheten eine Ungenauigkeit von etwa ± 1 Millimeter. Diese Ungenauigkeit macht sich im prozentualen Fehler des Quotienten um so weniger bemerkbar, je größer man die Längen der Katheten wählt. Also: B. 15 Regel 7: Zeichnen Sie zur Bestimmung des Anstiegs einer Geraden stets ein möglichst großes Steigungsdreieck ein. Selbst dann soll aber folgende Einschränkung gelten: Regel 8: Die aus einem Graphen von g bestimmten Werte von a und b werden auf drei signifikante Stellen gerundet. Bei Befolgung dieser beiden Regeln bleibt immer noch die Frage bestehen, wie zuverlässig der so ermittelte Wert des Anstiegs a ist. Die Antwort: Das hängt ausschließlich von der Größe der Streuung der Meßpunkte ab. Je größer die Streuung, desto ungenauer ist der Wert von a . B. 16