Richard Hellrigl
Werbung

DIPLOMARBEIT
“Lösungsansätze für
heuristische Probleme der
Quantenelektronik”
ausgeführt am Institut für
Allgemeine Elektrotechnik
der Technischen Universität Wien
von
Richard Hellrigl
Rienzdamm 38, I-39042 Brixen
unter Anleitung von
Doz. Dr. G. Reider
Doz. Dr. P. Wagner
Institut f. Allgemeine Elektrotechnik,
Abteilung für
Quantenelektronik und Laser
Institut für
Technische Universität Wien
Mathematik und Geometrie
Universität Innsbruck
Oktober 1993
Vorwort
Die Quantenmechanik ist heute ein Gebiet, das längst nicht mehr einer kleinen
Elite von theoretischen Physikern vorbehalten ist, sondern in zunehmendem Maße
von Ingenieuren verschiedenster Fachbereiche benötigt wird. Neben den technischen
Physikern und Chemikern zählen heute auch Elektrotechniker immer öfter zu den
Anwendern dieser Theorie, da Disziplinen wie Halbleitertechnik, Werkstoffwissenschaft und Laser-Technik sehr starken Gebrauch von quantenmechanischen Modellen machen.
In der Halbleitertechnik ist es beispielsweise notwendig (und auch üblich) bereits die elementarsten Leitungsprozesse unter Anwendung einfacher quantenmechanischer Vorstellungen zu beschreiben (Kronig-Penney-Modell); für genauere Berechnungen geht man dann auf entsprechend verfeinerte Modelle über, die nicht
nur einem qualitativen Verständnis dienen, sondern auch für quantitative Analysen herangezogen werden, um die Vorgänge im Halbleiter detailliert zu erfassen,
insbesondere dort, wo Messungen schwierig oder gar undurchführbar sind.
Neben dem großen Gebiet der Halbleitertechnik gibt es für den Elektroingenieur
unzählige weitere werkstoffwissenschaftliche Probleme, die quantenmechanischer Natur sind (so z. B. das magnetische Verhalten von Stoffen). Eine außerordentlich
bedeutsame elektrotechnische Anwendung der Quantenmechanik ergibt sich aber
durch den Laser: für seine Beschreibung ist es zwar nicht unbedingt erforderlich,
das Lichtfeld zu quantisieren, doch ist es unumgänglich, ein quantenmechanisches
Modell der Materie zugrundezulegen. Auch hier geht es zum einen um das Verständnis der grundlegenden Prinzipien und zum anderen um die Möglichkeit quantitative
Berechnungen anzustellen, die für Forschung und Entwicklung unverzichtbar sind.
Tatsächlich ist die Quantenmechanik heute ein fester Bestandteil der elektrotechnischen Ausbildung, sei es, weil sie in verschiedenen Vorlesungen immer wieder
kurz behandelt wird (so z. B. in Vorlesungen über Werkstoffwissenschaften, Halbleiter oder Photonik), oder weil ihr eine eigene Spezialvorlesung gewidmet ist (Für
Studierende der Hochfrequenztechnik an der TU-München ist beispielsweise eine
ziemlich umfangreiche Vorlesung über Quantenelektronik vorgeschrieben).
Es versteht sich von selbst, daß ein Elektroingenieur an möglichst einfachen und
praktisch orientierten Darstellungen der Quantentheorie interessiert ist; jeglichen
unnötigen mathematischen Ballast sowie historisch bedingte Komplikationen wird
er nach Möglichkeit meiden. Doch trotz eines sehr großen Angebotes an Lehrbüchern
zu diesem Thema, ist es für den Anfänger alles andere als einfach, sich die Grundlagen der Quantenmechanik anzueignen, was zu einem nicht unwesentlichen Teil daran
1
2
liegt, daß die heute allgemein üblichen Formulierungen dieser Theorie in mathematischer Hinsicht sehr unbefriedigend sind.
Die meisten einführenden Lehrbücher verwenden zur Formulierung der Quantenmechanik den heuristischen Dirac-Formalismus, der aber in seinen mathematischen Eigenschaften nur sehr ungenau und zum Teil widersprüchlich definiert ist.
Diese Imperfektion führt dazu, daß dieser Formalismus — trotz seiner rechnerisch
einfachen Handhabung — nur auf komplizierte Weise beschrieben werden kann, da
die mathematischen Unsicherheiten dem Gebrauch einer klaren Sprache im Wege
stehen.
Eine korrekte und widerspruchsfreie Darstellung der Quantenmechanik wurde
von J. v. Neumann vorgestellt, wobei es sich aber um keine Präzisierung der
Diracschen Methode handelt, sondern um ein von vornherein anderes Konzept.
Diese Formulierung ist für theoretische Überlegungen hervorragend geeignet, wird
aber von Praktikern wenig verwendet, da sie auf Begriffe aufbaut, denen in praktischen Berechnungen keine zentrale Bedeutung zukommt.
Wirklich befriedigend ist somit weder die Diracsche Formulierung, noch jene
des J. v. Neumann. Am unangenehmsten ist aber die Tatsache, daß der Zusammenhang zwischen diesen beiden Methoden keineswegs offensichtlich ist, wodurch
es recht schwierig wird, eine mit Diracschen Begriffen formulierte Aussage in die
Neumannsche Formulierung zu übersetzen und umgekehrt.
Den Autoren von Physikbüchern sind diese Probleme durchaus bewußt, was
man an der Ausführlichkeit erkennt, mit der in vielen Texten obige Komplikationen besprochen werden. Um so unverständlicher ist es daher, daß im allgemeinen
nicht versucht wird, diese Probleme durch Anwendung modernerer mathematischer
Methoden zu lösen. Die in Lehrbüchern der nichtrelativistischen Quantenmechanik
verwendete Mathematik ist meistens auch heute noch identisch mit jener, die von
Dirac bzw. v. Neumann Anfang der 30er Jahre entwickelt wurde. Tatsächlich gäbe
es aber wesentlich modernere mathematische Konzepte, die es zum einen gestatten,
die altbekannten heuristischen Methoden exakt zu definieren, und es zum andern
ermöglichen, eine einfache und durchsichtige Verbindung zwischen der Diracschen
und der Neumannschen Formulierung herzustellen.
In der vorliegenden Arbeit wird nun versucht diese neuen Konzepte so zu beschreiben, daß sie auch demjenigen zugänglich sind, der keine spezialisierten mathematischen Vorkenntnisse hat. Ein zweites Anliegen ist es, detaillierte Regeln für die
praktische Anwendung dieser Methoden auszuarbeiten, da sich die meisten Publikationen zu diesem Thema auf eher grundsätzliche Überlegungen beschränken. Die
Arbeit ist jedoch nicht als rein mathematische Abhandlung geschrieben, sondern
stellt das Gerüst einer Einführung in die Quantenmechanik dar, wie es z. B. als
Grundlage für den Entwurf einer Vorlesung dienen könnte. Durch diese Struktur
werden die neuen mathematischen Konzepte nicht nur vorgestellt, sondern es wird
gleichzeitig gezeigt, wie sie sich bei der Formulierung der Quantenmechanik einsetzen lassen. Nur so ist es möglich zu beurteilen, welche Vor- und Nachteile sie in
didaktischer Hinsicht gegenüber anderen Methoden haben.
Um alle in dieser Arbeit angeführten Aussagen hinreichend zu begründen und
um einen tieferen Einblick in die behandelte Materie zu ermöglichen, werden viele
mathematische Details mit einer Ausführlichkeit behandelt, die für den Praktiker
eher uninteressant ist. Doch auch nach Streichung dieser Details bleibt die Transparenz und die Korrektheit der mathematischen Struktur voll erhalten, wodurch
es möglich wird, die Quantenmechanik gleichzeitig präzise und einfach zu formulieren, um sie — gerade für Studierende der Elektrotechnik — leichter zugänglich zu
machen.
Inhaltsverzeichnis
Vorwort
1
Überblick über verschiedene Möglichkeiten bei der Formulierung der
Quantenmechanik
7
Verwendete Symbole und Maßeinheiten
1 Mathematische Grundlagen
1.1 Maße und Integrale . . . .
1.2 Der Hilbertraum . . . . .
1.3 Lineare Operatoren . . . .
1.4 Transformationstheorie . .
11
.
.
.
.
15
15
22
31
38
.
.
.
.
.
.
45
45
51
55
59
60
71
3 Zusätzliche mathematische Konzepte
3.1 Das Spektrum der Observablen . . . . . . . . . . . . . . . . . . . . .
3.2 Funktionen von Observablen . . . . . . . . . . . . . . . . . . . . . . .
3.3 Die v. Neumann-Methode . . . . . . . . . . . . . . . . . . . . . . . .
75
75
80
84
2 Die
2.1
2.2
2.3
2.4
2.5
2.6
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
physikalischen Strukturen
Zustände und Observablen . . . .
Das Einteilchensystem ohne Spin
Das Einteilchensystem mit Spin .
Mehrteilchensysteme . . . . . . .
Die Zeitentwicklung des Systems .
Erwartungswerte und Unschärfe .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Entwicklung nach Eigenvektoren
4.1 Das Gelfandsche Raumtripel . . . . .
4.2 Die verallgemeinerten Eigenvektoren
4.3 Die Topologie von Φ . . . . . . . . .
4.4 Beispiel: Das Wasserstoffatom . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
87
87
97
109
116
Literaturverzeichnis
123
Stichwortverzeichnis
125
5
6
Überblick über
verschiedene Möglichkeiten
bei der Formulierung
der Quantenmechanik
In diesem Kapitel werden die gebräuchlichsten Formulierungen der Quantenmechanik gegenübergestellt und mit jener Methode verglichen, die in der vorliegenden
Arbeit beschrieben wird1 .
Untersucht man eine Vielzahl von Lehrbüchern der Quantenmechanik, so sieht
man, daß die meisten im Prinzip die Methode Diracs2 verwenden und somit folgende Grundstruktur aufweisen:
i) Den Zuständen des quantenmechanischen Systems entsprechen Vektoren |f i
eines Hilbertraumes IH. Den Meßgrößen entsprechen selbstadjungierte Operatoren in IH, die man Observablen nennt.
ii) Zu jedem vollständigen Satz {A1 , A2 , . . . , An } kommutierender Observablen
gibt es ein (bis auf Konstanten eindeutiges) gemeinsames System von Eigenvektoren {|ξλ i}λ∈Rn 3 .
Für ein beliebiges |f i ∈ IH erhält man eine Funktion
f (λ) = hξλ | f i
indem man |f i mit den Eigenvektoren |ξλ i multipliziert (im Sinne einer Art
Skalarprodukt).
Obige Funktion f (λ) wird oft Spektraldarstellung von |f i (für den gegebenen Observablen-Satz) genannt. |f (λ)|2 ist die Wahrscheinlichkeitsdichte für
die Observablen A1 , A2 , . . . , An und entspricht somit dem, was in Versuchen
direkt meßbar ist.
1
Wir setzen dabei eine — zumindest grobe — Kenntnis der mathematischen Struktur der Quantenmechanik voraus, da die hier verwendeten Begriffe erst in späteren Kapiteln genauer definiert
werden.
2
Siehe Dirac [9], 1930.
3
Wir schreiben λ für das Tupel (λ1 , λ2 , . . . , λn ).
7
8
Schrödingers Ortsdarstellung ist beispielsweise eine Spektraldarstellung für die
Ortsobservablen; die Impulsdarstellung ist eine Spektraldarstellung für die Impulsobservablen. Bei der Beschreibung des Zustandes gebundener Elektronen
im Atom verwendet man i. allg. die Energiedarstellung; das ist die Spektraldarstellung für die Observablen H, L2 , Lz (Quantenzahlen n, ℓ, m).
Obiger Zusammenhang ist aber nur dann gegeben, wenn die Eigenvektoren |ξλ i in
einem speziellen Raum Φ′ liegen, der umfangreicher ist, als der Hilbertraum IH. Meistens werden die Vektoren aus Φ′ und ihre Eigenschaften nur sehr ungenau und heuristisch charakterisiert, was die gesamte Beschreibung der Quantenmechanik nicht
nur unbefriedigend, sondern auch schwierig und kompliziert macht. Seit Mitte der
60er Jahre ist man jedoch in der Lage, die Elemente aus Φ′ exakt zu beschreiben,
und zwar als Distributionen im sogenannten Rigged Hilbert Space, den wir im
Folgenden auch mit RHS bezeichnen werden.
Neben dem Diracschen Formalismus wird auch eine andere Methode oft verwendet, die auf J. v. Neumann4 zurückgeht und von Anfang an (d. h. seit 1932)
mathematisch exakt war. Punkt i) der Diracschen Methode gilt unverändert auch
in der v. Neumann-Methode und wurde sogar dort erstmals explizit in obiger Form
formuliert. Bei der Berechnung der Wahrscheinlichkeiten wird dann aber anders vorgegangen:
Für einen Satz kommutierender Observablen {A1 , A2 , . . . , An } gibt es einen eindeutigen Satz von Spektralscharen5 {E1 , E2 , . . . , En }, sodaß
hf |(E1 (∆1 ) · E2 (∆2 ) · · · En (∆n ))| f i
hf | f i
die Wahrscheinlichkeit dafür ist, daß die Meßergebnisse für die Observablen Ai in
den Intervallen ∆i ⊆ R liegen. Die Ei sind hierbei operatorwertige Funktionen, die
den Intervallen ∆i ⊆ R Projektionsoperatoren Ei (∆i ) zuordnen.
Diese Methode eignet sich wegen ihrer Exaktheit hervorragend für theoretische
Analysen (z. B. in Fragen der Axiomatik oder des Meßproblems), spielt aber in
praktisch orientierten Lehrbüchern eine eher untergeordnete Rolle. Das liegt zum
Teil an der großen Abstraktheit dieses Konzeptes, da die physikalische Interpretation der Spektralscharen wesentlich weniger anschaulich ist, als jene der Diracschen
Eigenvektoren, die man als ‘idealisierte Zustände’ auffassen kann. Der Hauptgrund
für die so häufige Bevorzugung der Diracschen Methode dürfte aber darin liegen,
daß den Spektralscharen in konkreten praktischen Berechnungen keine zentrale Bedeutung zukommt, da sie i. allg. erst nach Lösung des Eigenwertproblems ermittelt
werden können. Bei solchen Berechnungen ist man somit automatisch gezwungen,
sich an die Diracsche Methode zu halten; eine nachträgliche Übersetzung in den
v. Neumann-Formalismus ist dann eine — keineswegs einfache — ‘Fleißaufgabe’,
die von Praktikern i. allg. natürlich weggelassen wird.
In der vorliegenden Arbeit werden weder die Eigenvektoren (Dirac-Methode),
noch die Spektralscharen (v. Neumann-Methode) in den Mittelpunkt gestellt: als
4
5
Siehe J. v. Neumann [30], 1932.
Unterscheide zwischen Spektralschar und Spektraldarstellung.
9
zentralen Begriff verwenden wir jenen der Spektraldarstellung; diese werden wir
direkt definieren (als jene Darstellung von IH in der die betreffenden Observablen
‘diagonalisiert’ sind), und nicht erst über den Umweg der Eigenvektoren, wie dies in
der Diracschen Methode gemacht wird. Natürlich benötigen wir die Eigenvektoren
nach wie vor zur praktischen Berechnung der Spektraldarstellung, nicht aber zur Definition und grundlegenden Charakterisierung dieses Begriffes. Denn der so einfache
und elegante Begriff der Spektraldarstellung ist von zentraler physikalischer Bedeutung und benötigt für seine Definition weder Eigenvektoren noch Spektralscharen.
Dadurch erscheint es — vom didaktischen Standpunkt aus gesehen — ungünstig,
die Spektraldarstellung als lediglich abgeleitetes Konzept einzuführen, das auf so
komplizierte Dinge aufbaut, wie es die Eigenvektoren der Qunantenmechanik nun
mal sind.
Neben diesem didaktischen Argument gibt es aber noch grundlegendere Begründungen für obige Strategie: die Entwicklung nach Eigenvektoren ist in der Literatur
keineswegs einheitlich; abgesehen von den heuristischen Formulierungen gibt es eine ganze Palette von RHS-Methoden, von denen aber keine wirklich befriedigend
ist, da es bis heute kein einfaches und allgemeingültiges Kriterium gibt, das es gestattet die ‘physikalisch sinnvollen’ von den ‘unphysikalischen’ Eigenvektoren zu
unterscheiden. So findet man beispielsweise beim Wasserstoffatom für alle positiven
Energie-Werte je zwei Eigenvektoren6 , die beide recht ‘vernünftig’ aussehen, da beide
ein einigermaßen ‘vertrauenerweckendes’ Wachstumsverhalten aufweisen; tatsächlich
ist aber nur ein Lösungszweig ‘richtig’ und der andere Lösungszweig muß verworfen
werden (Genaueres hierzu im Abschnitt 4.4). Da in solchen Fällen zunächst nicht
klar ist, welche die ‘richtigen’ Eigenvektoren sind, kann es nicht sinnvoll sein, den
Spektraldarstellungs-Begriff mit Hilfe der Eigenvektoren definieren zu wollen. Erst
durch die direkte Definition der Spektraldarstellung ist das mathematische Problem
überhaupt eindeutig definiert, und erst dann ist es (zumindest im Prinzip) möglich,
zu sagen, welche Eigenvektoren ‘richtig’ sind und welche nicht.
Die Idee, den Begriff der Spektraldarstellung (an Stelle von Eigenvektoren oder
Spektralscharen) in den Mittelpunkt der Theorie zu stellen, ist keineswegs neu und
wurde in der bekannten Arbeit von Jauch und Misra [21],1965, auf eine exakte mathematische Basis gestellt. Die Ergebnisse dieser Arbeit waren sehr elegant
und hatten nur in einem einzigen Punkt eine etwas unangenehme Komplikation in
Form einer Zusatzbedingung. Später wurde aber in einem Artikel von de Dormale
und Gautrin [11],1975, gezeigt, daß diese Zusatzbedingung unnötig ist, wobei im
Gegensatz zu [21] sogar der Fall von überabzählbar vielen Observablen untersucht
wurde7 . Erst durch die Anwendung dieser Ergebnisse wird es möglich, die Quantenmechanik so zu formulieren, wie dies in der vorliegenden Arbeit gemacht wird.
6
Genauer: Die Eigenwertgleichungen
H |ξi
2
L |ξi
Lz |ξi
= E |ξi
= ℓ (ℓ + 1) |ξi
= m |ξi
haben für jedes E > 0 (und für festes ℓ und m) je 2 linear unabhängige Lösungen |ξ1 i und |ξ2 i.
7
Der Fall endlich vieler Observablen wurde bereits von Prugovečki hinreichend untersucht
10
Im Folgenden wollen wir noch etwas genauer auf den RHS eingehen:
Die bekannteste (und auch in dieser Arbeit verwendete) RHS-Formulierung der
Quantenmechanik geht auf Roberts zurück (siehe [37],1966, [38],1966)8 . Sie beruht
auf dem mathematischen Konzept des Gelfandschen Raumtripels9 , bei dem drei
in einander verschachtelte Räume betrachtet werden:
Φ ⊆ IH ⊆ Φ′ .
Φ ist ein Teilraum von IH mit einer sogenannten nuklearen Topologie; Φ′ ist der zu
Φ duale Raum (das ist der Raum der linear stetigen Funktionale über Φ).
In Φ′ hat man zwar alle Elemente, die für eine Entwicklung nach Eigenvektoren
benötigt werden, kann aber kein überall definiertes Skalarprodukt einführen (Φ′ ist
kein Hilbertraum). Für ein allgemeines Element aus Φ′ existiert eine Art Skalarprodukt nur mit den Elementen aus Φ , d. h. nur die Elemente aus Φ können mit
allen Elementen aus Φ′ multipliziert werden. Dies legt es nahe, den Raum Φ (an
Stelle von IH ) als den Raum der physikalisch realisierbaren Zustände anzusehen.
Diese Auffassung, die besonders von A. Bohm ([6],1978; [7],1986; [8],1989) vertreten wird, läßt sich physikalisch sehr gut begründen und hat den großen Vorteil, daß
in Φ alle betrachteten Observablen stetig und überall definiert sind. Ein gewichtiger Nachteil dieser Interpretation ist dagegen die fehlende Kompatibilität zu den
sonst üblichen Formulierungen der Quantenmechanik, in denen ganz IH als Raum
der Zustandsvektoren aufgefaßt wird. Der wirkliche Schwachpunkt obiger Interpretation liegt aber in der fehlenden Allgemeingültigkeit: es muß nämlich vorausgesetzt
werden, daß alle benötigten Observablen den Raum Φ invariant lassen (d. h. Φ in Φ
abbilden) und zusätzlich in Φ wesentlich selbstadjungiert sind. Diese Bedingung ist
schwer nachzuprüfen und ist, selbst bei sehr einfachen Systemen, keineswegs immer
erfüllbar. Außerdem ist diese Bedingung sonst von keiner großen praktischen oder
theoretischen Bedeutung, wodurch es zu einer reinen Zeitverschwendung wird, sie
nachprüfen zu wollen. Aus diesem Grund werden wir in der vorliegenden Arbeit
den Raum IH (und nicht den Raum Φ) als Raum der physikalisch realisierbaren
Zustände interpretieren. Φ muß dann nicht mehr eindeutig sein, und kann somit für
jeden Satz kommutierender Observablen neu gewählt werden (Die Existenz von Φ
ist dann garantiert). Auch die Bedingung der wesentlichen Selbstadjungiertheit auf
Φ kann fallengelassen werden.
Abschließend erwähnen wir noch, daß das Gelfandsche Raumtripel keineswegs die einzige Möglichkeit ist, eine Erweiterung des Hilbertraumes vorzunehmen. Interessante Alternativen wurden unter anderem von Babbitt [4],1972, oder
van Eijndhoven/ de Graaf [13],1985, vorgeschlagen; die dort beschriebenen Methoden sind jener des Gelfandschen Raumtripels in verschiedener Hinsicht überlegen,
sind letztlich aber deutlich komplizierter und hängen teilweise von recht scharfen Bedingungen ab.
(siehe [33],1969, [34],1971).
8
Diese Methode wurde auch in einer ganzen Reihe späterer Publikationen beschrieben, so z. B. in
Antoine[1],1969. Melsheimer[27],1974, [28],1974. A. Bohm[6], 1978. Diese Arbeiten beinhalten
aber — gegenüber den beiden Veröffentlichungen von Roberts — kaum Neues.
9
Siehe Gelfand/Wilenkin [17], 1964.
VERWENDETE SYMBOLE UND
MAßEINHEITEN
LISTE DER SYMBOLE, DIE ALS BEKANNT
VORAUSGESETZT WERDEN
A⊆B
A ist Teilmenge von B
(Sind A und B Operatoren, so bedeutet A ⊆ B, daß B eine
Erweiterung von A ist; siehe Seite 31)
A⊂B
A ist Teilmenge von B, aber A 6= B
A\B
Menge der Elemente, die in A sind, nicht aber in B
Z
Menge der ganzen Zahlen
N
Menge der natürlichen Zahlen, also N = {1, 2, 3, . . .}
R
Menge der reellen Zahlen
C
Menge der komplexen Zahlen
√
Imaginäre Einheit, d. h. j = −1
j
a
Komplex Konjugiertes zur Zahl a ∈ C
(Ist K eine Menge, so bezeichnet K die Abschließung dieser Menge,
siehe Seite 24)
{xi }i∈I
Menge von Elementen xi mit i ∈ I ( I eine beliebige Indexmenge)
{xi }∞
i=1
Wie oben,wobei aber präzisiert wird, daß die Indexmenge I
gleich der Menge der natürlichen Zahlen ist
∀i ∈ I : Ai
Für alle i ∈ I gilt Aussage Ai
∃i ∈ I : Ai
Es gibt ein i ∈ I für das die Aussage Ai gilt
a := b
a ist per definitionem gleich b
A :⇔ B
Aussage A gilt definitionsgemäß genau dann, wenn Aussage B gilt
[a, b]
Abgeschlossenes Intervall
]a, b[
n
Q
bi
Offenes Intervall
i=1
b1 · b2 · b3 · · · bn
11
12
a, b, c ∈ M
Die 3 Elemente a, b, c liegen in der Menge M
∅
Leere Menge
(a, b, c) ∈ M Das Element (a, b, c) liegt in M
ak → a
Ist gleichbedeutend mit lim ak = a
A :D → B
a 7→ b
Abbildung von D in B
a ∈ D wird auf b ∈ B abgebildet
f −1 (K)
Menge aller x aus dem Definitionsbereich von f , mit f (x) ∈ K
f (x)
A×B
k→∞
Dieses Symbol bezeichnet einerseits die Funktion selbst, andererseits
aber den Zahlenwert, den die Funktion für ein festes x annimmt.
Bei Verwechslungsgefahr schreiben wir (f (x))x für die 1. Bedeutung,
und f (x)|x für die 2. Bedeutung.
Ist K eine Menge, so bezeichnet f (K) die Menge aller y, für die es
ein x ∈ K gibt, das y = f (x) erfüllt.
Menge aller geordneten Paare (a, b) mit a ∈ A, b ∈ B
{a ∈ A|P (a) } Menge aller a ∈ A, die die Bedingung P (a) erfüllen
13
LISTE DER SYMBOLE, DIE IM TEXT EXPLIZIT DEFINIERT WERDEN
Rn
siehe Seite 15
RI
siehe Seite 15
λ
|ψi hψ|
siehe Seite 37
IH
siehe Seite 46
siehe Seite 15
1
∂
j i
siehe Seite 51
(λi )i∈I
siehe Seite 15
St
siehe Seite 52
πi (λ)
siehe Seite 15
F
siehe Seite 53
A ⊆ RI
siehe Seite 16
s
siehe Seite 55
µℓ
siehe Seite 18
σ, σz
siehe Seite 55
µℓ0
siehe Seite 18
△
siehe Seite 60
a.e.
siehe Seite 19
Σf (λ)
siehe Seite 21
O
siehe Seite 22
m
R
L2 RI , µ
K
siehe Seite 23
siehe Seite 24
C0∞ (Ω)
siehe Seite 25
S(Rn )
siehe Seite 25
hf | gi
siehe Seite 26
fk −→ f
H
siehe Seite 27
|f i
siehe Seiten 30/46
A ⊆ Â
siehe Seite 31
H- lim fk
siehe Seite 27
hg| A |f i
siehe Seite 31
A
siehe Seite 32
s.a.
siehe Seite 34
e.s.a.
siehe Seite 34
−1
hAi
siehe Seite 71
∆A
siehe Seite 71
[A, B]
siehe Seite 73
Ut0 t
siehe Seite 63
supp µ
siehe Seite 75
spec A
siehe Seite 77
E∆
siehe Seite 84
Prod0 {Bk }k∈K
siehe Seite 88
ErAlg {Bk }k∈K
siehe Seite 88
Alg0 {Bk }k∈K
siehe Seite 88
Φ, Φ∗
siehe Seite 92
HW
siehe Seite 94
Φ′R
siehe Seite 110
Φ′
siehe Seite 114
Yℓ,m (φ, ϑ)
siehe Seite 118
14
Maßeinheiten
In der gesamten Arbeit wird das sogenannte rationale Maßeinheitensystem verwendet, bei dem
µ 0 = ε 0 = c0 = ~ = 1
ist ( c0 = Vakuumlichtgeschwindigkeit, ε0 = Vakuumdielekrizitätskonstante,
h
).
µ0 = ε01c2 , ~ = 2π
0
Numerische Ergebnisse lassen sich mit folgender Tabelle sehr schnell in SIEinheiten umrechnen:
Größe
rationale Maßeinheit
Zeit
1e
s
Länge
1m
e (= e
s)
Masse
Stromstärke
Energie
El.Ladung
El.Spannung
Kraft
E-Feld
B-Feld
H-Feld
∗
= 1s
∗∗
f (= se−1 )
1Kg
e (= e
1A
s−1 )
1Je (= e
s−1 )
e (= 1)
1C
1Ve (= se−1 )
e (= se−2 )
1N
e
V
1m
e−2 )
e (= s
1Te (= se−2 )
e
∗
A
1m
e−2 )
e (= s
= 2.99792458 · 108 m
=r m
=
=
Kg
= 1.173388176 · 10−51 Kg
prk A
= 5.290860041 · 10−19 A
k
r2
√
f
e
= 1 Kges2m
=k J
√
es = prk C
= 1Ae
q
e
k
= 1 CJe = pr
V
2
f
e
= 1 Kgse2m
= kr N
q
V
= prk3 m
q
Ve se
k
= 1m
=
T
e2
pr 5
q
A
= pk
r m
= 1.0545887 · 10−34 J
= 5.290860041 · 10−19 C
= 1.993227362 · 10−16 V
= 3.517729255 · 10−43 N
V
= 6.648690814 · 10−25 m
= 2.217764536 · 10−33 T
A
= 1.764840942 · 10−27 m
Wir verwenden folgende Abkürzungen:
r = 2.99792458 · 108 , k = 1.0545887 · 10−34 ,
2
(Es ist somit c0 = r m
~ = k Js, ε0 = p NCm2 ).
s ,
p = 8.854187818 · 10−12
∗∗
Man nennt diese Längeneinheit auch ‘Lichtsekunde’. Das ist die Länge jener Strecke,
die das Licht in einer Sekunde zurücklegt. Seit 1983 wird das ‘Meter’ genau auf die hier
beschriebene Art und Weise definiert: 1m ist definitionsgemäß die Länge jener Strecke, die das
−1
Licht in 2.99792458 · 108
Sekunden zurücklegt.
Durch die Anwendung dieses Einheitensystems werden viele Ausdrucke einfacher
und durchsichtiger. Das führt unter anderem zu großen didaktischen Vorteilen, da
der physikalische Inhalt vieler Gleichungen wesentlich besser zu erkennen ist, wenn
man diese Gleichungen vom unnötigen Ballast der physikalischen Konstanten befreit.
Kapitel 1
Mathematische Grundlagen
1.1
Maße und Integrale
1.1.1
1
Die Menge RI
R ist die Menge der reellen Zahlen; R2 die Menge der (geordneten) Zahlenpaare
(λ1 , λ2 ), mit λ1 ∈ R, λ2 ∈ R. Allgemeiner ist
Rn := {(λ1 , λ2 , . . . , λn ) |λ1 ∈ R, λ2 ∈ R, . . . , λn ∈ R} ,
n = 1, 2, 3, . . . .
Wir verwenden ferner die Notationen λ = (λ1 , λ2 , . . . , λn) = (λi)n
i=1 und
λi = πi(λ).
Manchmal werden wir obiges Rn auch in der Form RI mit I = {1, 2, . . . , n}
schreiben, da die meisten Ergebnisse für beliebige Indexmengen I gelten, selbst
dann, wenn I unendlich ist. Wir definieren somit:
RI := {λ |∀i ∈ I : λi ∈ R}
(Jedes λ = (λi )i∈I ∈ RI hat für jedes i ∈ I eine Komponente λi = πi (λ). In diesem
Sinne ist λ eine I → R - Funktion). Im Bereich der nichtrelativistischen Quantenmechanik ist I normalerweise eine endliche Menge I = {1, 2, 3, . . . , n}. RI und Rn
drücken dann dasselbe aus.
Für die folgenden Überlegungen ist es günstig, sich unter RI das einfache Beispiel
R2 vorzustellen, das — geometrisch gesehen — mit einer ganz gewöhnlichen (2-dimensionalen) Ebene identifiziert werden kann.
1.1.2
Maße auf RI
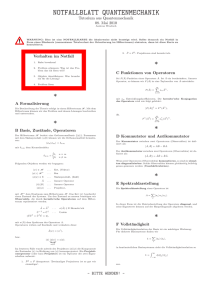
Ein Maß µ auf RI ordnet bestimmten Teilmengen A ⊆ RI eine nichtnegative Zahl
µ(A) zu (Es ist auch µ(A) = ∞ mglich). Ist z. B. RI = R2 , so kann man ein Maß
1
Eine detailliertere Beschreibung der Maß- und Integrations-Theorie findet man z. B. in Henze
[20] oder Prugovečki [34].
15
16
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
µ derart definieren, daß es den Teilmengen von R2 ihren Flächeninhalt zugeordnet
(siehe Abbildung 1.1).
O
8
A5
7
µ(A1 )
µ(A2 )
µ(A3 )
µ(A4 )
µ(A5 )
=
=
=
=
=
1
2
0
0
∞
6
5
A2
4
A3
3
2
-3
-2
-1
A4
A1
1
1
2
3
4
5
6
7
8
9
10 11
O
-2
Abbildung 1.1 Maß µ auf R2 mit µ(A) = Flächeninhalt der Teilmenge A.
Das Maß muß nicht für alle Teilmengen definiert sein, sondern nur für die sogenannten meßbaren Mengen. Welche Mengen meßbar sind, ist im wesentlichen
Definitionssache. Wir werden genau jene Teilmengen von RI als meßbar bezeichnen,
die sich nach folgenden Kriterien konstruieren lassen2 :
1. Ist K ein beliebiges (offenes,abgeschlossenes, oder halboffenes) Intervall in R,
so ist die Menge πi−1 (K) := λ ∈ RI |πi (λ) ∈ K} meßbar.
2. Ist A ⊆ RI meßbar, so ist auch RI \ A meßbar.
3. S
Sind die Mengen Ak ∈ RI meßbar (k = 1, 2, 3, . . .), so sind auch
∞
k=1 Ak meßbar.
T∞
k=1
Ak und
4. RI und ∅ (=leere Menge) sind meßbar.
So ist z. B. A5 aus Abbildung 1.1 meßbar, weil A5 = π2−1 (K) mit K = [6, 7].
A1 ist meßbar, weil A1 = π1−1 ([1, 2]) ∩ π2−1 ([2, 3]).
A2 ist meßbar, weil es sich als Vereinigung einer unendlichen Folge von immer kleiner
werdenden Quadraten darstellen läßt.
Obige Kriterien haben wir nur aus Gründen der mathematischen Vollständigkeit angeführt. Für das Verständnis dieser Arbeit reicht es aber aus, zur Kenntnis
zu nehmen, daß wir praktisch alle ‘einigermaßen vernünftigen’ Mengen als meßbar
bezeichnen (D. h. es ist kaum möglich, bei irgendwelchen physikalischen Fragestellungen auf Mengen zu stoßen, die nicht in obigem Sinne meßbar sind).
Wir führen noch folgende Notation ein:
m
A ⊆ RI
bedeutet, daß A eine meßbare Teilmenge von RI ist.
2
Für endliches oder abzählbares I definieren die hier angegebenen 4 Punkte genau die sogenannten Borel Mengen. In R2 sind das genau jene Mengen, die einen anschaulich definierten
Flächeninhalt haben, insbesondere also alle Mengen aus Abbildung 1.1.
17
1.1. MASSE UND INTEGRALE
Definition 1.1 Ein Maß µ auf RI ordnet jeder meßbaren Menge A ⊆ RI eine
nichtnegative Zahl µ(A) zu, wobei auch µ(A) = ∞ möglich ist.
Diese Zuordnung muß σ-additiv sein, d. h. es muß
!
∞
∞
[
X
µ
Ak =
µ(Ak ) wenn Ai ∩ Aj = ∅ für i 6= j
k=1
(Bei meßbaren Ak ist
k=1
∞
S
Ak ebenfalls meßbar, wie sich aus Punkt 3 von Seite 16
k=1
ergibt).
In Abbildung 1.1 bedeutet dies z. B.:
B1 := A1 ∪ A2 ∪ A3
B2 := A1 ∪ A5
folgt µ(B1 ) = 1 + 2 + 0 = 3
µ(B2 ) = 1 + ∞ = ∞.
aus
In diesem Zusammenhang muß vor folgendem Fehlschluß gewarnt werden:
In dem zu Abbildung 1.1 definierten Maß wird einem einzelnen Punkt stets das
Maß 0 zugeordnet (z. B. µ(A4 ) = 0). Nun setzt sich aber A1 (oder auch jede andere
Teilmenge von R2 ) aus einzelnen Punkten zusammen. Da alle diese Punkte das Maß 0
haben, müßte µ(A1 ) = 0 sein.
Der Fehler in dieser Überlegung ist der, außer acht zu lassen, daß die σ-Additivität
nur für höchstens abzählbar viele Mengen gilt, während A1 aus überabzählbar vielen
Einzelpunkten besteht.
Wir erinnern den Leser daran, daß eine unendliche Menge abzählbar heißt, wenn
ihre Elemente durchgezählt werden können, d. h. umkehrbar eindeutig den natürlichen Zahlen zugeordnet werden können. Die Menge der natürlichen Zahlen ist somit
abzählbar. Doch auch die Menge der ganzen Zahlen ist abzählbar, da sich auch die
ganzen Zahlen aufzählen lassen:
0, 1, −1, 2, −2, 3, −3, 4, −4, . . .
Die Menge der reellen Zahlen ist dagegen nicht abzählbar, wie sich zeigen läßt. Man
nennt solche Mengen überabzählbar. Eine Folge hat höchstens abzählbar viele
Glieder; eine Reihe hat höchstens abzählbar viele Summanden.
Definition 1.2 Ein Maß µ auf RI wird finit genannt, wenn
µ RI < ∞.
Das Maß wird σ-finit genannt, wenn es eine Folge meßbarer Mengen Fk gibt, mit
µ(Fk ) < ∞,
∞
[
k=1
Fk = RI .
(1.1)
18
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Das in Abbildung 1.1 definierte Maß ist zwar nicht finit, immerhin aber σ-finit.
2
Denn mit Fk = (λS
|λ1 | < k, |λ2 | < k} ist
1 , λ2 ) ∈ R
∞
2
µ(Fk ) = 4k 2 und
F
=
R
k=1 k
Wir werden im Folgenden ausschließlich σ-finite Maße betrachten, auch dann, wenn
wir das nicht immer explizit erwähnen.
Ergänzung: Ein σ-finites Maß µ kann stets in ein äquivalentes finites Maß µ′ übergeführt werden: setzt man (1.1) voraus, so ist µ′ mit
µ′ (A) =
∞
X
1 µ(A ∩ Fk )
2k µ(Fk )
k=1
I
m
A ⊆ RI
ein Maß mit µ′ R = 1. Die Maße µ und µ′ haben dieselben Nullmengen und
werden deshalb als äquivalent bezeichnet (Für die Definition des Begriffs Nullmenge
siehe Abschnitt 1.1.4). Viele Sätze, die für finite Maße gelten, können somit auch auf
σ-finite Maße angewendet werden können.
1.1.3
Wichtige Maße
Das Lebesgue-Maß auf R2 ist genau jenes Maß, das in Abbildung 1.1 vorgestellt
wurde: es ordnet den meßbaren Mengen ihren Flächeninhalt als Maß zu. In R ist
das Lebesgue-Maß so definiert, daß es die Länge angibt, d. h. es ist z. B.
µ([5, 7]) = µ(]5, 7[) = 2.
In R3 gibt das Lebesgue Maß dem Rauminhalt der betreffenden Teilmenge an. Analoges gilt in Rn : der n-dimensionale Würfel
Wn = {λ ∈ Rn | ai ≤ xi ≤ bi , i = 1, 2, . . . , n}
Q
hat das Lebesgue-Maß ni=1 (bi − ai ); das Lebesgue-Maß für alle anderen meßbaren
Mengen in Rn ergibt sich dann mit Hilfe der σ-Additivität.
Besonders interessant ist der Fall eines Maßes µ, das auf einer (meßbaren) Teilmenge B ⊆ Rn dem Lebesgue-Maß entspricht, und auf Rn \ B stets 0 ist, d. h. es
ist µ(A) = 0 für alle meßbaren A ⊆ Rn \ B. Nimmt man für B die kleinste abgeschlossene Menge, die dies leistet, so nennt man B den Träger des Maßes µ. Wir
nennen ein solches Maß eingeschränktes Lebesgue-Maß3 und bezeichnen es mit
µℓ0 . Das Lebesgue-Maß selbst bezeichnen wir mit µℓ.
Bisher haben wir nur Maße betrachtet, die einzelnen Punkten immer das Maß
0 zuordnen. In der Quantenmechanik kommen aber auch solche Maße vor, die einzelnen Punkten ein von 0 verschiedenes Maß zuordnen. Wir wollen solche Punkte
3
Der hier eingeführte Begriff des eingeschränkten Lebesgue-Maßes ist ein Spezialfall von dem,
was in der Literatur als absolut stetiges Maß (bezüglich des Lebesgue-Maßes) bezeichnet wird. Da
man in der Quantenmechanik an Stelle eines beliebigen absolut stetigen Maßes (bez. LebesgueMaß) immer ein ‘äquivalentes’ eingeschränktes Lebesgue-Maß verwenden kann, beschränken wir
uns auf die eingeschränkten Lebesgue-Maße.
19
1.1. MASSE UND INTEGRALE
Sprungpunkte des Maßes nennen (Im Englischen auch ‘pure points’ genannt)4 .
D. h. λ ∈ Rn ist ein Sprungpunkt des Maßes µ, wenn µ({λ}) > 0 ist. (Da wir nur
σ-finite Maße µ betrachten, kann es höchstens abzählbar viele Sprungpunkte geben).
Ein Maß µ wird reines Punktmaß genannt, wenn es nur aus Sprungpunkten
besteht, wenn also für jedes meßbare A ⊆ Rn
µ(A) =
X
µ({λ}) ,
λ∈A∩P
P = Menge der Sprungpunkte
.
A ∩ P = Menge der Sprungpunkte in A
Die in physikalischen Aufgabenstellungen der Quantenmechanik vorkommenden
Maße haben im allgemeinen folgende Struktur:
µ = µp + µℓ0 ,
wobei µp ein reines Punktmaß ist, und µℓ0 ein eingeschränktes Lebesgue-Maß (Die
Summe ist so zu verstehen, daß µ(A) = µp (A) + µℓ0 (A) für alle meßbaren A).
1.1.4
Nullmengen, Funktionsklassen
Definition 1.3 Sei µ ein Maß auf RI . Eine meßbare Menge A ⊆ RI wird Nullmenge genannt (oder Menge vom Maße 0), wenn µ(A) = 0 ist.
Gilt eine Eigenschaft für alle Punkte aus RI mit Ausnahme der Punkte einer
Nullmenge, so sagt man, diese Eigenschaft gelte ‘fast überall’ (englisch: almost
everywhere). Wir kürzen dies mit den Buchstaben a.e. ab.
Sind z. B. f1 (λ) , f2 (λ) zwei RI → RI - Funktionen, so bedeutet
f1 (λ) = f2 (λ) a.e.,
daß die Punkte λ ∈ RI , für die f1 (λ) 6= f2 (λ) gilt, in einer Nullmenge liegen.
In der Quantenmechanik beschreiben Funktionen, die a.e. gleich sind, den selben
physikalischen Zustand und sind in diesem Sinne äquivalent. Man faßt daher solche
äquivalenten Funktionen in sogenannte Funktionsklassen zusammen.
1.1.5
Integrale
5
Sei f (λ) eine RI → [0, ∞[ - Funktion und µ ein Maß auf RI . Ist [a, b] ein beliebiges
Intervall in R, so ist
f −1 ([a, b]) := λ ∈ RI f (λ) ∈ [a, b]}
eine Teilmenge von RI (In Abbildung 1.2 ist beispielsweise f −1 ([a2 , a3 ]) auf der Abszissenachse fett eingezeichnet (in diesem Beispiel ist RI = R und somit λ = λ ∈ R)).
4
Die Bezeichnung ‘Sprungpunkt’ ergibt sich daraus, daß µ(A) ‘springt’, wenn man die Menge
A um einen Sprungpunkt erweitert.
5
In diesem Abschnitt wird der Begriff des Lebesgue-Integrals in sehr groben Zügen erklärt. Für
physikalische Anwendungen reicht diese grobe Erklärung bei weitem aus. Detailliertere Beschreibungen findet der Leser z. B. in Prugovečki [34], Henze [20], oder Großmann [18].
20
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
f (O)
a7
a6
a5
a4
a3
a2
a1
O
Abbildung 1.2
Von der Funktion f (λ) wollen wir voraussetzen, daß für alle Intervalle L ⊆ R die
Menge f −1 (L) meßbar ist. Die Funktion f (λ) wird dann meßbar genannt 6 . Für eine
beliebige Unterteilung der Ordinatenachse in Intervalle [ai , ai+1 [ (siehe Abbildung
1.2) kann man dann folgende Summe bilden:
X
i
ai · µ f −1 ([ai , ai+1 [) .
Macht man die Intervalleinteilung der Ordinatenachse immer feiner, so nähert sich
obige Summe einem Grenzwert (der auch ∞ sein kann). Diesen Grenzwert nennt
man Lebesgue-Integral und bezeichnet ihn mit
Z
Z
f (λ) dµ(λ) oder
f (λ) dµ(λ) .
λ
Man kann auch über einen (meßbaren) Teilbereich B ⊆ RI integrieren (Hierzu setzt
man einfach f (λ) = 0 für λ ∈ RI \ B). Wir schreiben dann
Z
Z
f (λ) dµ(λ) .
f (λ) dµ(λ) oder
B
λ∈B
Bei λ = λ ∈ R und µ = µℓ verwenden wir auch die Notation
Zb
a
6
f (λ) dλ :=
Z
f (λ) dµℓ (λ) .
λ∈[a,b]
Alle stetigen Funktionen, aber auch alle ‘einigermaßen vernünftigen’ unstetigen Funktionen,
sind meßbar. Bei physikalischen Anwendungen hat man es somit immer mit meßbaren Funktionen
zu tun.
21
1.1. MASSE UND INTEGRALE
Bisher haben wir von der Funktion f (λ) vorausgesetzt, daß sie reell und nichtnegativ ist. Für allgemeines komplexwertiges f (λ) gibt es eine Zerlegung
f (λ) = f1 (λ) − f2 (λ) + jf3 (λ) − jf4 (λ)
mit reellen nichtnegativen Funktionen f1 , f2 , f3 , f4 . Es ist dann
Z
Z
Z
Z
Z
f (λ) dµ(λ) := f1 (λ) dµ(λ) − f2 (λ) dµ(λ) + j f3 (λ) dµ(λ) − j f4 (λ) dµ(λ)
(f ist definitionsgemäß genau dann meßbar, wenn es die Funktionen f1 , f2 , f3 , f4
sind).
Das Maß µ kann natürlich beliebig sein; besonders interessant ist aber der bereits
oben erwähnte Fall
µ = µp + µℓ0
mit µp als reines Punktmaß und µℓ0 als eingeschränktes Lebesgue-Maß. Wenn P die
Menge der Sprungpunkte ist und alle Sprungpunkte das Maß 1 haben, gilt
Z
Z
X
f (λ) dµ(λ) =
f (λ) + f (λ) dµℓ0(λ) .
(1.2)
λ∈P
Dieser Fall ist so charakteristisch für die Quantenmechanik, daß einige Autoren für
obigen Ausdruck ein eigenes Symbol verwenden, nämlich
Z
X
f (λ) .
Das auf der rechten Seite von (1.2) stehende Integral entspricht in der Praxis dem
— aus der elementaren Analysis bekannten — Riemann-Integral.
Genaugenommen bleibt noch ein kleiner Unterschied zum Riemann-Integral bestehen:
bei der Definition des Riemann-Integrals geht man von einer gleichmäßigen Zerlegung
der Abszisse (oder allgemeiner: des Definitionsbereiches RI ) aus, während wir bei der
Definition des Lebesgue-Integrals von einer gleichmäßigen Zerlegung der Ordinate
ausgegangen sind. Dieser feine Unterschied führt dazu, daß das Lebesgue-Integral
für einige (stark unstetige) Funktionen noch existiert, für die das Riemann-Integral
nicht mehr definiert ist. Dies hat zwar große theoretische Vorteile, ist aber für die
Praxis bedeutungslos, da für die dort auftretenden Funktionen das Riemann-Integral
existiert und mit dem Lebesgue-Integral übereinstimmt.
22
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
1.2
Der Hilbertraum
1.2.1
Lineare Räume
Definition 1.4 Ein Vektorraum oder Linearer Raum ist eine Menge E, in der
folgende Strukturen definiert sind:
• Für je 2 Elemente f, g ∈ E ist eine Summe f + g ∈ E definiert, die folgende
Eigenschaften hat:
⊲ f + g = g + f , für alle f, g ∈ E (Kommutativgesetz)
⊲ (f + g) + h = f + (g + h), für alle f, g, h ∈ E (Assoziativgesetz)
⊲ Es gibt einen Nullvektor O in E, sodaß O + f = f für alle f ∈ E
7
⊲ Zu jedem f ∈ E gibt es ein Inverses −f ∈ E, sodaß f + (−f ) = O
• Für alle f ∈ E, α ∈ C ist eine Multiplikation αf ∈ E definiert, die folgende
Eigenschaften hat8 :
α ∈ C,
⊲ α (f + g) = αf + αg,
⊲ (α + β) f = αf + βf,
⊲ α (βf ) = (αβ) f,
⊲ 1f = f,
α, β ∈ C,
α, β ∈ C,
f ∈E
f, g ∈ E
f ∈E
f ∈E
Die Elemente des Vektorraumes heißen Vektoren.
Weitere Eigenschaften, wie etwa
(−1) f = −f
0f = O
αO = O
lassen sich sofort herleiten.
Beispiel 1.1 Wir betrachten den Raum C3 . Seine Elemente sind Zahlentripel
a1
a 2 ∈ C3 .
a3
7
Die Addition ist definiert durch
a1
b1
a1 + b 1
a2 + b 2 = a2 + b 2 .
a3
b3
a3 + b 3
Wir verwenden für den Nullvektor das Symbol O, um es von der Zahl 0 zu unterscheiden.
An Stelle von C kann im Prinzip auch jeder andere Körper (z. B. R) genommen werden. Wir
betrachten hier aber ausschließlich komplexe Vektorräume.
8
23
1.2. DER HILBERTRAUM
Die Multiplikation mit einer Konstanten α ∈ C ist definiert durch
a1
αa1
α a2 = αa2 .
a3
αa3
Man kann leicht nachprüfen, daß alle Bedingungen aus Definition 1.4 erfüllt sind.
Grob gesprochen ist ein Vektorraum ein Raum in dem Linearkombinationen
αf + βg
gebildet werden können. Eine Teilmenge D ⊆ E eines Vektorraumes E ist genau
dann wieder ein Vektorraum, wenn alle Linearkombinationen aus D wieder in D
liegen, d. h.
∀f, g ∈ D; α, β ∈ C : αf + βg ∈ D.
Wir nennen ein solches D einen linearen Teilraum von E.
1.2.2
Der Raum L2 RI , µ
Definition 1.5 Eine meßbare Funktion f : RI → C heißt (bez. des Maßes µ) quadratintegrabel oder quadratsummabel, wenn
Z
|f (λ)|2 dµ(λ) < ∞.
Wie bereits früher erwähnt, nennen wir 2 Funktionen f (λ) , g(λ) äquivalent (bez.
des Maßes µ), wenn
f (λ) = g(λ) a.e..
Definition 1.6 Mit L2 (RI , µ) bezeichnen wir die Menge der quadratintegrablen
RI → C - Funktionen,
wobei aber zwei äquivalente Funktionen ein und dasselbe EleI
ment aus L2 R , µ darstellen.
Genaugenommen sind die Elemente aus L2 RI , µ keine Funktionen, sondern Funktionsklassen äquivalenter Funktionen.
Dieser Raum steht in der Quantenmechanik im Mittelpunkt aller Berechnungen, da die Zustände eines quantenmechanischen Systems durch quadratintegrable
Funktionen dargestellt werden.
Seien f (λ) , g(λ) ∈ L2 RI , µ , und α, β ∈ C. Man sieht leicht, daß dann auch die
Linearkombination
h(λ) := αf (λ) + βg(λ)
(1.3)
ein Element aus L2 RI , µ ist.
24
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Begründung: Bei quadratintegrablen f, g ist auch h quadratintegrabel (Denn
es gilt
|f (λ) + g(λ) |2 ≤ 2|f (λ) |2 + 2|g(λ) |2 ). Da aber die Elemente aus L2 RI , µ Funktionsklassen sind, muß man auch zeigen, daß obige Definition jeder Linearkombination
von Funktionsklassen wieder eine eindeutige Funktionsklasse zuordnet: sei
f (λ) = f˜(λ) a.e. und
Sei ferner
h(λ) := αf (λ) + βg(λ) ,
g(λ) = g̃(λ) a.e..
h̃(λ) := αf˜(λ) + βg̃(λ) .
Man sieht leicht, daß dann
h(λ) = h̃(λ) a.e.
ist.
Es läßt sich leicht nachprüfen, daß die durch (1.3) definierten Linearkombinationen
alle Eigenschaften aus Definition 1.4 haben. Es gilt somit:
Satz 1.1 L2 RI , µ ist ein linearer Raum.
1.2.3
Die Räume C∞
0 und S
Definition 1.7 Sei K eine Teilmenge von Rn . Ein Punkt λ̂ ∈ Rn heißt Häufungspunkt von K, wenn es eine Folge λ1 , λ2 , λ3 , . . . in K gibt, die gegen λ̂ ∈ Rn konvergiert (d. h. für jedes i ∈ {1, 2, . . . , n} konvergiert die Komponente λik = πi (λk )
gegen λi = πi (λ̂)).
Die Teilmenge K ⊆ Rn heißt abgeschlossen, wenn sie alle ihre Häufungspunkte
enthält. Eine Teilmenge Ω ⊆ Rn heißt offen, wenn Rn \ Ω abgeschlossen ist.
Die leere Menge ist per definitionem offen und abgeschlossen. Somit ist auch Rn
offen und abgeschlossen.
Die Abschließung K von K ⊆ Rn ist jene Menge, die entsteht, wenn man K
um ihre Häufungspunkte erweitert. K ist dann (wie sich zeigen läßt) die kleinste
abgeschlossene Menge, die K enthält.
Beispiel 1.2 Die Menge [0, 1[ ist nicht abgeschlossen. Denn die Zahl 1 ist ein Häufungspunkt von
[0, 1[, liegt aber nicht in [0, 1[. Nimmt man diesen Grenzpunt hinzu, so erhält man die Menge
[0, 1]; das ist die Abschließung von [0, 1[.
Beispiel 1.3 Die einpunktige Menge [1, 1] = {1} ∈ R ist abgeschlossen. Folglich ist R \ {1} offen.
Definition 1.8 Sei f : Rn → C eine beliebige Funktion. Die Menge
Tf := {λ ∈ Rn | f (λ) 6= 0}
wird Träger von f genannt.
Man spricht von kompaktem Träger, wenn Tf beschränkt ist (wenn also Tf in
einer ‘Kugel’ K(r) = {λ ∈ Rn | |λ| < r} liegt (für irgend ein r < ∞)) 9 .
9
Eine Teilmenge des Rn ist kompakt, wenn sie beschränkt und abgeschlossen ist. Da Tf per
definitionem abgeschlossen ist, ist die Menge Tf genau dann kompakt, wenn sie beschränkt ist.
25
1.2. DER HILBERTRAUM
Definition 1.9 Sei Ω eine offene Teilmenge von Rn (besonders interessant sind die
Fälle Ω = Rn und Ω = Rn \ {0}).
C0∞(Ω) ist die Menge der Funktionen f : Rn → C, für die gilt
i) f ist beliebig oft differenzierbar (insbesondere also stetig)
ii) f hat einen kompakten Träger, der in Ω liegt.
Definition 1.10 S(Rn ) ist die Menge der Funktionen f : Rn → C, für die gilt
i) f ist beliebig oft differenzierbar (insbesondere also stetig)
ii) f fällt — zusammen mit allen Ableitungen — stärker als jede Potenz. D. h. es
ist
k1 k2
q1 q2
∂
∂
∂ kn
qn
· · · kn f (λ) < ∞,
qi , ki ∈ {0, 1, 2, . . .} .
sup λ1 λ2 · · · λn
k
k
1
2
∂λn
∂λ1 ∂λ2
λ∈Rn
Offensichtlich ist C0∞ (Ω) ⊆ C0∞ (Rn ) ⊂ S(Rn ).
Satz 1.2 Es gilt
C0∞ (Ω) ⊂ L2 (Rn , µℓ )
und
S(Rn ) ⊂ L2 (Rn , µℓ )
(Ω eine offene Teilmenge von Rn )
Dieser Satz muß noch näher erläutert werden, da er — wörtlich genommen — nicht
korrekt ist: die Elemente aus C0∞ (Ω) (und auch jene aus S(Rn )) sind Funktionen,
während L2 (Rn , µℓ ) aus Funktionsklassen besteht. Somit kann C0∞ (Ω) keine Teilmenge von L2 (Rn , µℓ ) sein. Die Notation
C0∞ (Ω) ⊂ L2 (Rn , µℓ )
(1.4)
ist hier so zu verstehen, daß C0∞ (Ω) injektiv in L2 (Rn , µℓ ) ‘eingebettet’ werden kann:
jedes Element aus C0∞ (Ω) ist quadratintegrabel und läßt sich somit eindeutig einem
Element aus L2 (Rn , µℓ ) zuordnen. Obige Teilmengen-Notation ist aber erst dann gerechtfertigt, wenn diese Zuordnung injektiv ist, wenn also zwei verschiedene Elemente
aus C0∞ (Ω) stets zwei verschiedenen Elementen aus L2 (Rn , µℓ ) zugeordnet werden.
D. h. zwei verschiedene Elemente aus C0∞ (Ω) dürfen nicht a.e. gleich sein. Diese
Bedingung ist hier erfüllt und somit die Notation (1.4) gerechtfertigt.
Nimmt man an Stelle von µℓ ein eingeschränktes Lebesgue-Maßes µℓ0 , so ist
C0∞ (Ω) ⊂ L2 (Rn , µℓ0 )
nur dann korrekt, wenn Ω vollständig im Träger von µℓ0 liegt. Andernfalls kann es
vorkommen, daß zwei verschiedene Elemente aus C0∞ (Ω) ein und dem selben Element
aus L2 (Rn , µℓ ) entsprechen.
Die Linearkombinationen nach (1.3) von Elementen aus C0∞ (Ω) (bzw. aus S(Rn ))
liegen wieder in C0∞ (Ω) (bzw. in S(Rn )). Somit gilt:
Satz 1.3 C0∞ (Ω) und S(Rn ) sind lineare Räume.
26
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
1.2.4
Strahlen eines Vektorraumes
Definition 1.11 Sei E ein linearer Raum und f ein beliebiges (aber von O verschiedenes) Element aus E. Der Strahl von f ist die Menge
{g ∈ E| g = αf mit α ∈ C}
Jedes von O verschiedene Element aus E gehört einem eindeutigen Strahl an. Zwei
Vektoren f, g ∈ E gehören genau dann dem selben Strahl an, wenn es ein α ∈ C
gibt, sodaß g = αf (f, g 6= 0).
Dieser Begriff ist deshalb von Bedeutung, weil die quantenmechanischen Zustände umkehrbar eindeutig den Strahlen eines linearem Raumes entsprechen.
1.2.5
Das innere Produkt
Definition 1.12 Ein inneres Produkt (oder Skalarprodukt) in einem Vektorraum E ordnet jedem Paar f, g ∈ E eine Zahl hf | gi ∈ C zu, sodaß
i) hg | f i = hf | gi
ii) hf | α1 g1 + α2 g2 i = α1 hf | g1 i + α2 hf | g2 i,
iii) hf | f i ≥ 0,
für α1 , α2 ∈ C
und hf | f i = 0 ⇐⇒ f = O
Ein Vektorraum mit innerem Produkt heißt unitärer Raum (Im Englischen auch
‘inner product space’).
Bemerkungen:
ad i):
hf | gi bezeichnet das komplex Konjugierte zu hf | gi.
ad ii): Wir haben hier — wie in der Physik üblich — das Skalarprodukt so definiert, daß es
linear im 2. Faktor ist. Wegen i) ist es dann antilinear im 1. Faktor:
hα1 f1 + α2 f2 | gi = α1 hf1 | gi + α2 hf2 | gi
In Mathematik-Büchern wird das Skalarprodukt oft linear im 1. Faktor definiert (und
folglich antilinear im 2. Faktor).
ad iii): Aus i) folgt bereits, daß hf | f i reell ist. In iii) wird nun zusätzlich gefordert, daß hf | f i
nichtnegativ ist und genau dann 0 ist, wenn f = O.
Zur Notation: Oft findet man in der Literatur auch die Schreibweisen hf, gi und (f, g).
Satz 1.4 (Schwarzsche Ungleichung) Sei E ein Vektorraum mit Skalarprodukt
(also ein unitärer Raum). Dann gilt für beliebige f, g ∈ E
|hf | gi|2 ≤ hf | f i · hg | gi.
Satz 1.5 In L2 RI , µ läßt sich ein Skalarprodukt wie folgt definieren: für beliebige
f, g ∈ L2 RI , µ ist
Z
hf | gi = f (λ)g(λ) dµ(λ)
27
1.2. DER HILBERTRAUM
Zum Beweis dieses Satzes muß gezeigt werden, daß das Integral für alle f, g ∈ L2 RI , µ
existiert, endlich ist und alle Bedingungen von Definition 1.12 erfüllt.
Man erkennt an dieser Stelle, warum wir L2 RI , µ als Menge von Funktionsklassen
definiert haben: nach Punkt iii) von Definition 1.12 muß gelten
hf | f i = 0 ⇐⇒ f = O.
Aus
Z
f (λ)f (λ) dµ(λ) = 0
folgt aber nur
f (λ) = 0 a.e..
D. h. das Nullelement in L2 RI , µ muß aus allen Funktionen bestehen, die fast überall
gleich 0 sind.
1.2.6
Hilbertraum-Konvergenz
Definition 1.13 Sei E ein unitärer Raum und f ∈ E. Die Norm von f ist definiert
durch
p
kf k := + hf | f i.
Speziell für f ∈ L2 RI , µ erhält man
2
kf k = hf | f i =
Z
f (λ)f (λ) dµ(λ) =
Z
|f (λ)|2 dµ(λ)
Aus Definition 1.12 folgt
kf k ≥ 0
und
kf k = 0 ⇐⇒ f = O
Weiters läßt sich die sogenannte Dreiecksungleichung zeigen:
kf + gk ≤ kf k + kgk .
Mit Hilfe der Norm kann im unitären Raum ein Konvergenzbegriff definiert werden:
Definition 1.14 Sei (fk )k=1,2,3,... eine Folge von Vektoren eines unitären Raumes E.
Die Folge heißt konvergent gegen f ∈ E, wenn die Zahlenfolge kfk − f k gegen 0
konvergiert. Symbolisch:
H
fk −→ f
:⇐⇒
kfk − f k −→ 0
oder
H-lim fk = f
k→∞
:⇐⇒
lim kfk − f k = 0.
k→∞
28
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
H
In L2 RI , µ führt fk (λ) −→ f (λ) zur Konvergenz im Mittel:
Z
|fk (λ) − f (λ)|2 dµ(λ) −→ 0
Definition 1.15 Eine Folge (fk )k=1,2,3,... im unitären Raum E heißt Cauchy-Folge,
wenn
∀ǫ > 0 : ∃N : k1 , k2 > N ⇒ kfk1 − fk2 k < ǫ.
Gibt es in E für jede Cauchy-Folge ein Element gegen das diese Folge konvergiert, so heißt E vollständig. Ein vollständiger unitärer Raum wird Hilbertraum
genannt.
Vollständige Räume haben den Vorteil, daß man nicht mit dem Begriff der
Cauchy-Folge arbeiten muß: da in solchen Räumen jede Cauchy-Folge konvergiert,
kommt man mit dem Begriff der konvergenten Folge aus.
Satz 1.6 Der Raum L2 RI , µ ist vollständig, also ein Hilbertraum.
Satz 1.7 Das Skalarprodukt in einem Hilbertraum E ist stetig, d. h. es gilt
H
H
fk −→ f, gk −→ g
=⇒ hgk | fk i → hg | f i.
Die Grenzwertbildung ist somit mit der Skalarproduktbildung vertauschbar. Dasselbe gilt auch für die algebraischen Operationen:
Satz 1.8 Die algebraischen Operationen in einem Hilbertraum E sind stetig,
d. h. es gilt
H
H
H
fk −→ f, gk −→ g
=⇒
αfk + βgk −→ αf + βg
Besonders wichtig ist der folgende Begriff:
Definition 1.16 Eine Teilmenge D des Hilbertraumes E heißt dicht in E, wenn es
für jedes f ∈ E eine Folge (fk )k=1,2,3,... in D gibt, die gegen f konvergiert.
Beispiel 1.4 Die Menge C ist ein (besonders einfacher) Hilbertraum. Die Menge der rationalen
komplexen Zahlen (Real- und Imaginärteil rational) ist dicht in C.
Beispiel 1.5 Die Menge der stetigen Rn → C - Funktionen ist dicht in L2 (Rn , µℓ )
Satz 1.9 Sei D dicht im Hilbertraum E. Dann gilt für beliebige f, g ∈ E:
(∀ϕ ∈ D : hϕ | f i = hϕ | gi)
=⇒
f =g
Satz 1.10 Sei Ω eine offene Teilmenge von Rn . C0∞ (Ω) ist genau dann dicht in
L2 (Rn , µℓ ), wenn Rn \ Ω das Lebesgue-Maß 0 hat.
(Beweis: siehe Roberts [38], Lemma 1).
29
1.2. DER HILBERTRAUM
1.2.7
Orthonormalsysteme
Definition 1.17 Zwei Vektoren f, g eines Hilbertraumes heißen orthogonal, wenn
hf | gi = 0.
Definition 1.18 Eine Teilmenge {ψk }k∈K eines Hilbertraumes heißt Orthogonalsystem, wenn die ψk paarweise orthogonal sind, d. h. wenn
hψk | ψl i = 0 für k 6= l
Wenn zusätzlich alle ψk auf 1 normiert sind, spricht man von Orthonormalsystem. Man kann dann schreiben
hψk | ψl i = δkl
(δkl := 1 für k = l
δkl := 0 für k 6= l).
Definition 1.19 Ein Orthonormalsystem {ψk }k∈K in einem Hilbertraum E heißt
vollständig,wenn es maximal ist, wenn es also keinen (von O verschiedenen) Vektor f gibt, der zu allen ψk orthogonal ist.
Es läßt sich leicht zeigen, daß jedes Orthonormalsystem zu einem vollständigen
Orthonormalsystem erweitert werden kann.
Ein bestimmter Hilbertraum hat natürlich viele verschiedene vollständige Orthonormalsysteme. Es laßt sich aber zeigen, daß all diese vollständigen Orthonormalsysteme die gleiche Mächtigkeit haben. Gibt es z. B. in einem Hilbertraum ein
vollständiges Orthonormalsystem mit 5 Elementen, so haben alle vollständigen Orthonormalsysteme in diesem Hilbertraum genau 5 Elemente. Hat man in einem
anderen Hilbertraum ein vollständiges Orthonormalsystem mit abzählbar unendlich vielen Elementen, so haben alle vollständigen Orthonormalsysteme in diesem
Hilbertraum abzählbar unendlich viele Elemente10 .
Definition 1.20 Die Dimension eines Hilbertraumes E ist die Mächtigkeit (=Anzahl der Elemente) der vollständigen Orthonormalsysteme in E (Diese haben bei
festem E alle dieselbe Mächtigkeit). Ist die Dimension endlich oder abzählbar unendlich, so nennen wir den Hilbertraum separabel11 .
Die in der Quantenmechanik verwendeten Hilberträume haben die Dimension
abzählbar unendlich und sind somit immer separabel. Der
Raum L2 RI , µ interes
siert uns daher nur für solche Maße µ, für die L2 RI , µ separabel ist. Die Separabilität werden wir in allen weiteren Betrachtungen stets voraussetzen.
10
Für einen Beweis dieses Sachverhaltes siehe z. B. Großmann [18], Seite 60.
In manchen Texten — besonders in jenen älteren Datums — wird die Separabilität in die
Hilbertraum-Definition hineingezogen. Dort ist der Hilbertraum per definitionem ein separabler
vollständiger unitärer Raum.
11
30
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Satz 1.11 Sei E ein separabler Hilbertraum und (ψk )k=1,2,3,... ein vollständiges Orthonormalsystem in E. Für jedes f ∈ E gilt dann
f=
∞
X
αk = hψk | f i.
αk ψk ,
k=1
Ferner gilt für alle f, g ∈ E
hg | f i =
∞
X
αk = hψk | f i,
βk αk ,
k=1
βk = hψk | gi
Bei der Anwendung dieses Satzes ist es von Vorteil, die sogenannte Diracsche
Notation zu verwenden: die Vektoren aus E werden hierbei mit den Symbolen
|f i , |gi , |ψi , . . . bezeichnet. Für Satz 1.11 schreiben wir symbolisch
∞
X
k=1
|ψk i hψk | = 1.
Die Anwendung dieses Satzes erfolgt dann durch das sogenannte Einschieben der
Eins:
!
∞
∞
X
X
|f i = 1 |f i =
|ψk i hψk | |f i =
|ψk i hψk | f i
k=1
k=1
oder
hg | f i = hg | 1f i = hg|
∞
X
k=1
!
|ψk i hψk | f i =
∞
X
k=1
hg | ψk ihψk | f i.
Dieses Einschieben der Eins ist zunächst als rein symbolischer Rechenvorgang zu
verstehen. Hinter dieser Symbolik steckt aber ein exakter Formalismus: Interpretiert man |ψk i hψk | als Projektionsoperator (siehe Seite 36), so konvergiert die Reihe
P
|ψk i hψk | im sogenannten Operator-Norm-Limes gegen den Einheitsoperator. Aus
dieser Operator-Konvergenz folgt, daß obiges Einschieben der Eins erlaubt ist.
Beispiel 1.6 In L2 (R, µℓ ) bilden die Funktionen
ψk (λ) = e−
λ2
2
Hk (λ) ,
Hk (λ) = Hermitesche Polynome
ein vollständiges Orthonormalsystem (siehe Großmann [18], Seite 83). Für jede Funktion
f (λ) ∈ L2 (R, µℓ ) gilt dann:
|f i =
X
k
|ψk i hψk | f i und folglich f (λ) =
X
k
ψk (λ) αk , αk =
Z
ψk (λ) f (λ) dµℓ (λ) .
31
1.3. LINEARE OPERATOREN
1.3
Lineare Operatoren
1.3.1
Grundlegende Definitionen
Definition 1.21 Seien DA und WA lineare Räume. Ein linearer Operator
A : DA −→ WA
f 7−→ Af
ist eine lineare Abbildung von DA in WA . ‘Linear’ heißt hier: für alle f, g ∈ DA ,
und alle α, β ∈ C gilt
A (αf + βg) = αAf + βAg.
DA heißt Definitionsbereich, WA Bildbereich oder Wertevorrat.
Für beliebiges D ⊆ DA definieren wir
AD := {f ∈ WA | ∃g ∈ D : f = Ag} .
Wir nennen AD das Bild von D (bez. A). Das Bild des Definitionsbereiches DA
wird manchmal auch Bild des Operators A genannt. Umfaßt dieses Bild den
gesamten Bildbereich, so sagt man, A sei surjektiv (d. h. A ist surjektiv, wenn
ADA = WA ).
Definition 1.22 Unter einem linearen Operator im Hilbertraum E verstehen
wir einen linearen Operator A : DA → E mit DA ⊆ E und DA dicht in E.
Von linearen Operatoren im Hilbertraum E setzen wir also immer voraus, daß sie
dicht definiert sind. Ist speziell DA = E, so sagt man, A sei überall definiert.
Bemerkung zur Notation: bei Verwendung der Diracschen Notation schreibt man
für den Vektor Af , je nach Situation, wahlweise A |f i oder |Af i. Es mag zwar konsequenter erscheinen, immer die Notation A |f i zu verwenden, doch ist das in manchen
Situationen nicht sinnvoll.
Ähnliches gilt für die Linearkombination αf + βg: in der Diracschen Notation kann
man hierfür abwechselnd die Schreibweisen α |f i + β |gi und |αf + βgi verwenden.
Wir erwähnen noch, daß manche Autoren für das Skalarprodukt hg | Af i die Notation
hg| A |f i verwenden.
Sind A : DA → E und  : D → E zwei Operatoren mit DA ⊆ D und
Af = Âf,
für f ∈ DA ,
so sagt man, Â ist eine Erweiterung von A, bzw. A ist eine Einschränkung von Â;
wir schreiben dann A ⊆ Â.
Zwei lineare Hilbertraum-Operatoren A : DA → E, B : DB → E werden natürlich genau dann als gleich bezeichnet, wenn
DA = DB
und ∀f ∈ DA : Af = Bf.
Man kann jedoch diese Bedingung abschwächen:
32
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Satz 1.12 Zwei lineare Hilbertraum-Operatoren A : DA → E, B : DB → E sind
genau dann gleich, wenn
DA = DB
und ∀f ∈ DA : hf | Af i = hf | Bf i.
(Für einen Beweis dieses Satzes siehe z. B. Großmann [18], Seite 100).
Ein besonders einfacher Operator ist der Einheitsoperator, der jedem Vektor
f wieder den selben Vektor f zuordnet. Wir bezeichnen diesen Operator mit 1. Das
kann zwar zu Verwechslungen mit der Zahl 1 führen, doch ist das nicht weiter störend, da die Anwendung des Einheitsoperators auf f stets das selbe Ergebnis liefert,
wie die Multiplikation von f mit der Zahl 1. Analog zum Einheitsoperator gibt es
den Operator α (mit α ∈ C), der dem Vektor f den Vektor αf zuordnet.
Hat man zwei lineare Operatoren A : DA → WA , B : DB → WB , so kann man
das Produkt AB definieren:
AB : DAB −→ WA
f 7−→ A (Bf )
,
DAB := {f ∈ DB | Bf ∈ DA } .
Bei Hilbertraum-Operatoren ist dieses Produkt aber nur dann interessant, wenn DAB
dicht im Hilbertraum ist. Zu beachten ist, daß Operator-Produkte im allgemeinen
nicht kommutativ sind, d. h. es kann
AB 6= BA
sein. Das Assoziativgesetz ist dagegen erfüllt:
A (BC) = (AB) C.
Für zwei lineare Operatoren A : DA → W,
Summe A + B definieren:
(A + B) : DA+B −→ W
f 7−→ Af + Bf.
,
B : DB → W kann man eine
DA+B := DA ∩ DB .
Für Hilbertraum-Operatoren ist diese Summe aber nur dann interessant, wenn DA+B
dicht im Hilbertraum ist. Hat man noch einen dritten linearen Operator C : DC →
W , so gilt das (etwas eingeschränkte) Distributivgesetz:
C (A + B) ⊇ CA + CB.
Definition 1.23 Sei A : DA → WA ein linearer Operator und BA := ADA .
Wenn es einen Operator
A−1 : BA −→ DA
gibt, der für alle f ∈ DA die Gleichung
A−1 Af = f
erfüllt, so wird A−1 inverser Operator (zu A) genannt.
33
1.3. LINEARE OPERATOREN
Satz 1.13 Existiert zu einem linearen Operator A ein Inverses A−1 , so ist dieses
eindeutig und ebenfalls linear. Ferner ist dann A das Inverse zu A−1 , d. h. es ist
−1
(A−1 ) = A.
Satz 1.14 Seien A : DA → WA , B : DB → WB zwei lineare Operatoren. Existieren
die Inversen A−1 , B −1 und das Produkt AB, so hat auch AB ein Inverses und es
gilt
(AB)−1 = B −1 A−1 .
1.3.2
Beschränkte Operatoren
Definition 1.24 Sei A : DA → WA ein linearer Operator. DA und WA seien Teilmengen von Hilberträumen. Die Norm von A ist definiert durch
kAk :=
kAf k
.
f ∈DA \{O} kf k
sup
Ist kAk < ∞, so heißt A beschränkt.
Die beiden folgenden Sätze zeigen, daß linear-beschränkte Operatoren besonders
angenehme Eigenschaften haben.
Satz 1.15 Sei A : DA → E ein linear-beschränkter Operator im Hilbertraum E (DA
b : E → E erweitert
dicht in E). Dann kann A stets zu einem linearen Operator A
werden, der auf ganz E definiert ist. Diese Erweiterung ist eindeutig und es gilt
b k = kAk.
kA
Einen linear-beschränkten Operator kann man also stets (eindeutig) zu einem überall
definierten Operator erweitern. Wir werden daher von linear-beschränkten Operatoren meistens voraussetzen, daß sie überall definiert sind, was den Umgang mit
diesen Operatoren wesentlich erleichtert.
Satz 1.16 Sei A : E → E ein linear-beschränkter Operator im Hilbertraum E. Dann
ist A überall stetig, d. h. für jede konvergente Folge (fk )k=1,2,3,... in E gilt
H
H
fk −→ f =⇒ Afk −→ Af .
Linear-beschränkte Operatoren können somit völlig sorglos mit Grenzwertbildungen
vertauscht werden, d. h. es gilt
A H- lim fk = H- lim (Afk ) .
k
k
Die beiden oben angeführten Sätze gelten unverändert auch dann, wenn Definitionsbereich und Bildbereich in zwei verschiedenen Hilberträumen E1 und E2 liegen:
Der linear-beschränkter Operator
A : DA → E 2 ,
(DA dicht in E1 )
ist stetig und kann in eindeutiger Weise (und unter Beibehaltung der Norm) auf ganz
E1 ausgedehnt werden. Es läßt sich sogar zeigen, daß A genau dann stetig ist, wenn
A beschränkt ist; die Begriffe ‘linear-beschränkt’ und ‘stetig’ sind somit äquivalent.
34
1.3.3
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Selbstadjungierte Operatoren
Definition 1.25 Sei A : DA → E ein linearer (dicht definierter) Operator im Hilbertraum E. Gilt für alle f, g ∈ DA
hf | Agi = hAf | gi,
(1.5)
so nennt man A symmetrisch. Gilt zusätzlich
(A + j) DA = E
und
(A − j) DA = E,
(1.6)
so nennt man A selbstadjungiert. Für ‘selbstadjungiert’ verwendet man oft auch
die Abkürzung s.a.12 .
Ein s.a. Operator A ist ein symmetrischer Operator, der einen so ‘großen’ Definitionsbereich hat, daß die Bilder (A + j)DA und (A − j)DA ganz E umfassen. Ist ein
symmetrischer Operator nicht s.a., so kann man ihn eventuell durch Erweiterung
des Definitionsbereiches zu einem s.a. Operator machen. Nicht jeder symmetrische
Operator läßt sich aber zu einem s.a. Operator erweitern, und selbst dann, wenn es
eine s.a. Erweiterung gibt, so ist diese i. allg. nicht eindeutig (d. h. es kann mehrere
Möglichkeiten geben DA so zu erweitern, daß A s.a. wird).
Definition 1.26 Ein symmetrischer Operator A : DA → E heißt im wesentlichen
s.a., wenn er eine eindeutige s.a. Erweiterung besitzt. Wir kürzen diese Eigenschaft
mit e.s.a. ab (englisch: essentially self-adjoint).
In der Quantenmechanik entsprechen den physikalischen Größen selbstadjungierte
Operatoren. Um mit einem solchen Operator zu arbeiten, muß man aber nicht seinen
gesamten Definitionsbereich kennen: es genügt eine Teilmenge des Definitionsbereiches zu kennen, auf dem der Operator e.s.a. ist; der s.a. Operator ist dann eindeutig
bestimmt.
Wir erwähnen noch, daß ein s.a. Operator stets maximal symmetrisch ist: wenn
ein Operator s.a. ist, so ist es nicht möglich, diesen Operator noch zu erweitern,
ohne dabei die Symmetrieeigenschaft (1.5) zu verlieren.
Der folgende Satz zeigt, daß die Frage des Definitionsbereiches nur dann von
Bedeutung ist, wenn der s.a. Operator nicht beschränkt ist:
12
Diese Definition ist völlig äquivalent zur gebräuchlicheren Charakterisierungung A = A∗ (mit
A als adjungiertem Operator). Einen Beweis hierfür findet man z. B. in Reed/Simon [35], Theorem VIII.3.
Wir erwähnen noch, daß aus (1.5) und (1.6) bereits folgt, daß DA dicht in E ist: ist DA nicht
dicht, so gibt es ein f ∈ E \ {O} mit hf | pi = 0 für alle p ∈ DA . Wegen (A + j)DA = E gibt es
ein k ∈ DA mit f = (A + j)k. Wegen (A − j)DA = E gibt es zu jedem g ∈ E ein p ∈ DA mit
g = (A − j)p. Aus der Symmetrie von A folgt schließlich
∗
hk | gi = hk | (A − j)pi = h(A + j)k | pi = hf | pi = 0.
Da g beliebig aus E ist, muß k = O sein, was aber ein Widerspruch zur Vorausetzung f 6= O ist.
35
1.3. LINEARE OPERATOREN
Satz 1.17 Jeder beschränkte s.a. Operator ist überall definiert. Umgekehrt gilt: jeder
symmetrische überall definierte Operator ist s.a..
Aus diesem Satz folgt, daß ein unbeschränkter s.a. Operator nicht überall definiert
sein kann.
Wir haben bereits auf Seite 33 erwähnt, daß unbeschränkte Operatoren nicht
stetig sind, d. h. man darf Grenzwertbildungen nicht sorglos mit der OperatorVorschrift vertauschen. Für s.a. Operatoren gilt aber, daß solche Vertauschungen
immerhin dann zulässig sind, wenn man dabei ein vernünftiges Ergebnis erhält:
Satz 1.18 Ein s.a. Operator A : DA → E ist immer abgeschlossen, d. h.:
wenn (fk )k=1,2,3,... eine Folge in DA ist, die gegen f ∈ E konvergiert und die Folge
(Afk )k=1,2,3,... ebenfalls konvergiert (gegen irgend ein Element aus E), so ist f ∈ DA
und es gilt
Af = A (H- lim fk ) = H- lim (Afk ) .
(1.7)
Um sicherzustellen, daß (1.7) gilt, genügt es somit nachzuweisen, daß die Folge Afk
konvergiert. Bei stetigen (=beschränkten) Operatoren ist diese Überprüfung überflüssig, da — bei konvergentem fk — die Folge Afk immer konvergiert (vergleiche
Satz 1.16).
Die Abgeschlossenheit der s.a. Operatoren hilft auch bei der Bestimmung des
Definitionsbereiches:
Satz 1.19 Sei A : ΦA → E ein e.s.a. Operator. Es gibt dann bekanntlich eine
eindeutige s.a. Erweiterung A : DA → E.
Ein f ∈ E liegt genau dann in DA , wenn es eine Folge (fk )k=1,2,3,... in ΦA gibt, sodaß
H
fk −→ f
und
H
∃g ∈ E : Afk −→ g
(Nach Satz 1.18 ist dann Af = g).
Abschließend erwähnen wir noch:
Satz 1.20 Ist A : DA → E ein selbstadjungierter (oder auch nur ein symmetrischer)
Operator, so ist das Produkt hf | Af i für alle f ∈ DA reellwertig.
Bei f 6= g ist hf | Agi i. allg. naturlich nach wie vor komplexwertig.
1.3.4
Eigenwerte und Eigenvektoren
Definition 1.27 Sei A : DA → E ein linearer Operator im Hilbertraum E. Gibt es
zu einem λ ∈ C ein vom Nullvektor verschiedenes f ∈ DA mit
Af = λf,
so heißt λ (eigentlicher) Eigenwert von A, und f ist ein zugehöriger (eigentlicher) Eigenvektor.
36
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Wir haben in dieser Definition von ‘eigentlichen’ Eigenwerten und Eigenvektoren
gesprochen, weil wir fordern, daß f in DA liegt (insbesondere also auch f ∈ E). Im
Kapitel 4 werden wir sogenannte ‘verallgemeinerte’ Eigenwerte und Eigenvektoren
kennenlernen, bei denen f aus einem umfangreicheren Raum ist.
Ist f ein Eigenvektor zum Eigenwert λ, so ist offenbar auch αf (mit α ∈ C)
ein Eigenvektor zu λ. Der Eigenvektor zu einem Eigenwert ist somit nie eindeutig
bestimmt. Wenn man aber sagt, zu einem Eigenwert gebe es mehrere Eigenvektoren,
so meint man i. allg., daß es mehrere Eigenvektoren gibt, die nicht im selben Strahl
liegen. In diesem Fall sagt man, der Eigenwert sei entartet13 .
Es läßt sich leicht zeigen, daß bei selbstadjungiertem A alle Eigenwerte reell sind
und die Eigenvektoren zu verschiedenen Eigenwerten
orthogonal sind.
I
Ist E ein Funktionenraum (z. B. E = L2 R , µ ), so nennt man die Eigenvektoren
oft auch Eigenfunktionen.
1.3.5
Projektoren
Definition 1.28 Eine Teilmenge R ⊆ E eines Hilbertraumes E nennen wir
vollständigen Teilraum, wenn R linear und vollständig ist (d. h. alle Linearkombinationen von Elementen aus R liegen wieder in R, und alle Grenzelemente
von konvergenten Folgen aus R liegen wieder in R). R ist dann für sich genommen
wieder ein Hilbertraum.
Satz 1.21 Sei R ein vollständiger Teilraum des Hilbertraumes E.
Für jedes f ∈ E gibt es eine eindeutige Zerlegung
f = fR + fR⊥ ,
sodaß fR ∈ R und fR⊥ orthogonal zu allen Elementen aus R ist.
Die Abbildung
P : E −→ E
f 7−→ P f = fR
ist linear, d. h. P ist ein linearer Operator. Er wird Projektor (oder Orthogonalprojektion) genannt, weil er f auf den Teilraum R ‘projiziert’, d. h. er ‘filtert’ von
f jene ‘Komponente’ heraus, die in R liegt.
Satz 1.22 Wenn P ein Projektor ist, dann gilt:
• P ist beschränkt und es ist kP k = 1
• P ist s.a.
• P P = P (P ist ‘idempotent’).
Umgekehrt ist jeder linear-beschränkte s.a. Operator mit P P = P ein Projektor.
13
Die maximale Anzahl paarweise ortogonaler Eigenvektoren zu einem Eigenwert nennt man den
Entartungsgrad (oder die Vielfachheit) dieses Eigenwertes.
37
1.3. LINEARE OPERATOREN
Definition 1.29 Sei ψ ∈ E und kψk = 1 (E ein Hilbertraum). Das Symbol
|ψi hψ|
bezeichnet jenen Operator, der f ∈ E auf αψ abbildet, mit α = hψ | f i.
In Diracscher Notation:
|ψi hψ|
angewendet auf
|f i
ergibt
|ψi hψ | f i.
Man sieht leicht, daß |ψi hψ| ein Projektor ist, und zwar jener, der auf folgenden
eindimensionalen Teilraum projiziert:
R = {g ∈ E| ∃α ∈ C : g = αψ}
(Das ist der Strahl von ψ).
Satz 1.23 Sei R ein vollständiger Teilraum des (separablen) Hilbertraumes E und
sei P der (eindeutig bestimmte!) Projektor zu R. P kann dann in folgender Form
dargestellt werden:
X
P =
|ψk i hψk | .
k∈K
Hierbei ist (ψk )k∈K ein beliebiges vollständiges Orthonormalsystem in R. Obige Summe ist so zu verstehen, daß für beliebiges f ∈ E gilt
X
Pf =
ψk hψk | f i,
(1.8)
k∈K
oder in Diracscher Notation:
P |f i =
X
k∈K
|ψk i hψk | f i.
Umgekehrt gilt: zu jedem beliebigen Orthonormalsystem (ψk )k∈K in E ist der
durch (1.8) definierte Operator ein Projektor. Er projiziert auf einen Teilraum, in
dem (ψk )k∈K ein vollständiges Orthonormalsystem ist.
Eine spezielle Anwendung dieses Konzeptes haben wir bereits in Satz 1.11 kennengelernt:
ist (ψk )k∈K ein vollständiges Orthonormalsystem in E, so ist P =
P
|ψ
i
hψ
k
k | gleich dem Einheitsoperator, was uns auf Seite 30 veranlaßte
k∈K
X
k∈K
|ψk i hψk | = 1
zu schreiben. Somit folgt Satz 1.11 aus obigem Satz 1.23.
38
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
1.4
Transformationstheorie
1.4.1
Unitäre Transformationen
e und
Definition 1.30 Seien E und Ee zwei Hilberträume (eventuell auch E = E)
T : E → Ee ein linearer Operator mit folgenden Eigenschaften:
• T ist längentreu (=isometrisch), d. h. ∀f ∈ E : kT f k = kf k
e
• T ist surjektiv, d. h. das Bild von A umfaßt ganz E.
T heißt dann unitärer Operator14 . Gelegentlich nennen wir T : E → Ee auch eine
Darstellung (von E).
Satz 1.24 Sei T : E → Ee ein unitärer Operator. Dann gilt:
i) kT k = 1
ii) T −1 existiert und ist ebenfalls unitär
iii) ∀f, g ∈ E : hf | gi = hT f | T gi.
Wegen der Surjektivität von T und der Existenz von T −1 ist T bijektiv, d. h. T
ist eine umkehrbar eindeutige eins zu eins Zuordnung zwischen den Elementen aus
e zu jedem f ∈ E gibt es ein eindeutiges fe ∈ Ee und zu jedem
E und jenen aus E:
fe ∈ Ee gibt es ein eindeutiges f ∈ E. Da diese Zuordnung auch noch linear und
längentreu ist, kann man alle Hilbertraum-Operationen völlig äquivalent in E oder
in Ee durchführen.
Der durch einen unitären Operator T : E → Ee hergestellte Zusammenhang
zwischen E und Ee ist so eng, daß jedem linearen Operator in E genau ein linearer
Operator in Ee entspricht:
Satz 1.25 Sei
T : E −→ Ee
f 7−→ fe
eine unitäre Transformation. Dann gibt es zu jedem linearen Operator A in E einen
e in E,
e sodaß
eindeutigen linearen Operator A
efe = e
Af = g ⇐⇒ A
g.
e heißen unitäräquivalent und es gilt
Die Operatoren A und A
e = T AT −1
A
efe = e
(denn es ist A
g = T g = T Af = T AT −1 fe).
(1.9)
Einige Autoren sprechen nur dann von ‘unitärem Operator’, wenn E = Ee ist; für den allgemeineren Fall verwenden sie statt dessen die Bezeichnung ‘isometrischer Operator’.
14
39
1.4. TRANSFORMATIONSTHEORIE
e = T AT −1 besitzt, und nicht die Form A
e=
Um sich zu merken, daß (1.9) die Form A
e beide den Bildbereich Ee haben; die Operatoren
T −1 AT , beachte man, daß T und A
−1
e und T AT haben somit den selben Bildbereich und können daher gleich sein.
A
Satz 1.26 Sei T : E → Ee eine unitäre Transformation. Ein linearer Operator A in
e in Ee s.a. ist.
E ist genau dann s.a., wenn der zu A unitäräquivalente Operator A
1.4.2
Multiplikationsoperatoren
Definition 1.31 Sei G(λ) eine (meßbare) RI → R - Funktion. In L2 RI , µ ist
dann ein linearer Operator G definiert durch
G : DG −→ L2 RI , µ
f (x) 7−→ G(x) · f (x)
mit
DG := f (λ) ∈ L2 R , µ n
I
Z
o
|G(x) f (x)|2 dµ(x) < ∞ .
Die Anwendung des Operators G auf f (x) entspricht also der Multiplikation von
f (x) mit der Funktion G(x). Einen Operator dieses Typs nennen wir Multiplikationsoperator15 .
Ist die Funktion G(x) beschränkt, so ist der entsprechende Multiplikationsoperator
ebenfalls beschränkt und überall definiert (D. h. es ist DG = L2 RI , µ ) 16 . Doch
selbst bei unbeschränkter Funktion G(x) ist der Multiplikationsoperator immer noch
dicht definiert17 .
Ein Spezialfall eines Multiplikationsoperators liegt dann vor, wenn G(λ) = λi ist
(für irgend ein i ∈ I); Operatoren dieses Typs nennen wir v-Operatoren:
Definition 1.32 Der v-Operator λi sei definiert durch
λi : Di −→ L2 RI , µ
f (λ) 7−→ λi f (λ)
Z
n
o
I
Di := f (λ) ∈ L2 R , µ λ2i |f (λ)|2 dµ(λ) < ∞ .
Einen solchen Operator gibt es für jedes i ∈ I.
Satz 1.27 v-Operatoren sind stets s.a..
15
An Stelle der Bezeichnung ‘Multiplikationsoperator’ wird häufig auch die Bezeichnung Diagonaloperator verwendet.
16
Es läst sich leich zeigen, daß die Norm des Multiplikationsoperators gleich der kleinsten Zahl
M ist, für die |G(λ)| ≤ M a.e. ist.
17
Denn der Multiplikationsoperator F (λ) := |G(λ)| hat offensichtlich den selben Definitionsbereich wie der Multiplikationsoperator G(λ); nach Satz 1.28 ist F (λ) s.a. und somit dicht definiert.
40
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Beweis: Es läßt sich leicht zeigen, daß λi symmetrisch ist. Für die Selbstadjungiertheit muß aber noch gezeigt werden, daß
(λi ± j) Di = L2 RI , µ .
Offenbar gilt für jedes λi ∈ R
λ2i
2
|λi ± j|
=
λ2i
≤ 1.
λ2i + 1
2
R
|h(λ)|2 dµ(λ) < ∞ stets auch λ2i λi1±j h(λ) dµ(λ) < ∞. D. h. für
jedes h(λ) ∈ L2 RI , µ ist g(λ) := λi1±j h(λ) ∈ Di . Folglich gibt es zu jedem h(λ) ∈
L2 RI , µ ein g(λ) ∈ Di , sodaß (λi ± j) g(λ) = h(λ). QED
Somit ist bei
R
Doch nicht nur v-Operatoren sind s.a., sondern ganz allgemein alle reellwertigen
Multiplikationsoperatoren:
Satz 1.28 Ein Multiplikationsoperator G(λ) ist genau dann s.a., wenn die Funktion
G(λ) reellwertig ist.
Beweis: Bei nicht reellwertigem G(λ) ist der Multiplikationsoperator nicht symmetrisch und somit nicht s.a.. Nehmen wir nun an, G(λ) sei reellwertig, also eine RI → R
- Funktion. Wir betrachten die Abbildung
T : L2 RI , µ −→ L2 RI × R, µ
b
f (λ) 7−→ fb(λ, η) .
Das Maß µ
b sei definiert durch
b = µ(∆)
µ
b(∆)
n
o
b ,
mit ∆ = λ ∈ RI (λ, G(λ)) ∈ ∆
und die Funktion fb(λ, η) habe die Gestalt
fb(λ, η) = f (λ) .
Da sich leich zeigen läßt, daß T längentreu und surjektiv ist, ist T unitär. Der Multiplikationsoperator ist somit unitäräquivalent zum v-Operator η, der nach Satz 1.27
s.a. ist. QED.
1.4.3
Spektraldarstellung und Kommutierbarkeit
Definition 1.33 Seien A und B zwei beschränkte (überall definierte) HilbertraumOperatoren. Man sagt, diese Operatoren kommutieren, wenn
AB = BA.
Wir haben in obiger Definition vorausgesetzt, daß die Operatoren beschränkt sind;
dadurch können wir annehmen, daß A und B sowie die Operator-Produkte AB
und BA überall definiert sind. Bei unbeschränkten Operatoren müssen wir anders
vorgehen:
41
1.4. TRANSFORMATIONSTHEORIE
Definition 1.34 Seien A und B zwei Hilbertraum-Operatoren und sei B beschränkt.
Man sagt diese Operatoren kommutieren, wenn
BA ⊆ AB,
d. h. wenn
∀f ∈ DA : (Bf ∈ DA und ABf = BAf ).
(Wenn auch A beschränkt ist, so geht Definition 1.34 offensichtlich in Definition 1.33
über).
Wenn beide Operatoren unbeschränkt sind, definieren wir die Kommutierbarkeit
nur mehr für s.a. Operatoren:
Definition 1.35 Seien A und B zwei s.a. Operatoren und a, b beliebige komplexe
Zahlen mit nichtverschwindendem Imaginärteil. Dann läßt sich zeigen, daß
RA (a) := (a − A)−1
und RB (b) := (b − B)−1
beschränkte (und überall definierte) Operatoren sind. Man sagt, die s.a. Operatoren
A und B kommutieren, wenn für alle a, b ∈ C mit Im(a) , Im(b) 6= 0 gilt:
RA (a) RB (b) = RB (b) RA (a) .
Insbesondere kommutiert jeder s.a. Operator mit sich selbst; denn man kann zeigen,
daß für beliebige a, b mit nichtverschwindendem Imaginärteil stets RA (a) RA (b) =
RA (b) RA (a) ist.
Bei beschränkten Operatoren ist Definition 1.35 äquivalent zu Definition 1.33
(bzw. äquivalent zu Definition 1.34, falls nur einer der Operatoren beschränkt ist).
Für zwei unbeschränkte s.a. Operatoren ist
ABf = BAf
für f ∈ DAB ∩ DBA
immer noch eine notwendige Bedingung für die Kommutierbarkeit; diese Bedingung
ist aber nicht mehr hinreichend (auch dann nicht, wenn DAB ∩ DBA dicht im Hilbertraum ist).
Die Kommutierbarkeit bleibt bei unitären Transformationen erhalten:
e =
Satz 1.29 Seien A, B s.a. Operatoren, T eine unitäre Transformation und A
−1 e
−1
e
e
T AT , B = T BT . Dann gilt: A kommutiert mit B genau dann, wenn A mit B
kommutiert.
Hat man nicht nur zwei Operatoren, sondern einen ganzen Operator-Satz
{Ai }i∈J , so bezeichnet man diese Operatoren als kommutierbar, wenn sie paarweise
kommutieren, d. h. wenn für alle k, ℓ ∈ J der Operator Ak mit dem Operator Aℓ
kommutiert.
42
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Definition 1.36 Sei E ein separabler Hilbertraum
und {Ai }i∈J ein Satz linearer
Operatoren in E. Ist T : E → L2 RI , µ eine unitäre Transformation (µ ein σ-finites Maß), so entsprechen
den Operatoren Ai unitäräquivalente Operatoren Ai =
−1
I
T Ai T in L2 R , µ . Falls obige Transformation derart ist, daß alle Ai v-Operatoren in L2 RI , µ sind, nennen
wir T eine diagonalisierende Darstellung für
I
{Ai }i∈J . Gibt es in L2 R , µ keine weiteren v-Operatoren, so nennen wir T eine
Spektraldarstellung18 für {Ai }i∈J (Bei einer Spektraldarstellung ist J = I, bei
einer diagonalisierenden Darstellung ist J ⊆ I).
Da v-Operatoren stets s.a. sind, kann es nur für s.a. Operatoren eine diagonalisierende Darstellung geben. (Denn die Selbstadjungiertheit bleibt nach Satz 1.26 bei
einer unitären Transformation erhalten). Die Selbstadjungiertheit ist aber noch keine hinreichende Bedingung für die Existenz einer gemeinsamen diagonalisierenden
Darstellung für die Operatoren Ai :
Satz 1.30 Sei {Ai }i∈J ein Satz s.a. Operatoren. Für {Ai }i∈J gibt es genau dann
eine diagonalisierende Darstellung, wenn die Ai kommutieren (wenn also für alle
k, ℓ ∈ J der Operator Ak mit dem Operator Aℓ kommutiert).
Beweis: Sind λA und λB zwei v-Operatoren in L2 RI , µ , so gilt offenbar
−1
(a − λA )
(b − λB )
−1
−1
f (λ) = (b − λB )
−1
(a − λA )
f (λ) .
Somit kommutieren die beiden v-Operatoren. Da die Kommutierbarkeit bei unitären
Transformationen erhalten bleibt, kann es für {Ai }i∈J nur dann eine diagonalisierende
Darstellung geben, wenn die Ai kommutieren. Es bleibt somit nur noch zu zeigen,
daß die Kommutierbarkeit auch hinreichend für die Existenz einer diagonalisierenden
Darstellung ist.
Sei M eine Menge s.a. Operatoren. Mit M′ bezeichnen wir die Menge aller beschränkten Hilbertraum-Operatoren, die mit allen Operatoren aus M kommutieren.
Ergänzung: Sei P jene Operator-Menge, die von den Spektralscharen der
Operatoren aus M gebildet wird (Der Begriff der Spektralschar wird im Abschnitt 3.3
Bei Verwendung der dort beschriebenen Terminologie
S eingeführt.
A
ist P = A∈M {E∆
} m ). Dann ist M′ = P ′ (Siehe z. B. Großmann [18],
∆⊆R
Gleichung (18.1)). P hat gegenüber M den Vorteil, stets aus beschränkten
Operatoren zu bestehen.
Mit M′′ bezeichnen wir die Menge aller beschränkten Operatoren, die mit allen Operatoren aus M′ kommutieren; analog dazu ist M′′′ definiert. Man nennt M′′ die von
M generierte von Neumann-Algebra. Offensichtlich gilt
M1 ⊆ M2 =⇒ M′1 ⊇ M′2
18
Unsere Definition entspricht weitgehend jener aus de Dormale/Gautrin [11]. Im Gegensatz
zu [11] haben wir aber explizit die σ-Finitheit von µ gefordert (Nach Halmos/Sunder
[19],
Example 1.1, folgt die σ-Finitheit noch nicht aus der Separabilität von L2 RI , µ ). Die Ergebnisse
aus [11] können aber dennoch unverändert übernommen werden, da das in [11] konstruierte Maß
σ-finit ist.
43
1.4. TRANSFORMATIONSTHEORIE
′′′
(Und analog dazu: M′1 ⊇ M′2 ⇒ M′′1 ⊆ M′′2 , bzw. M′′1 ⊆ M′′2 ⇒ M′′′
1 ⊇ M2 ).
Außerdem läßt sich zeigen, daß
M′ = M′′′
(Siehe J. von Neumann [31], Seite 405). Die von Neumann-Algebra M′′ wird abelsch
genannt, wenn
M′′ ⊆ M′′′ ;
sie wird maximal abelsch genannt, wenn
M′′ = M′′′ .
Wenn die Operatoren aus M kommutieren, ist M′′ abelsch (Denn aus der Kommutierbarkeit der s.a. Operatoren aus M folgt die Kommutierbarkeit ihrer Spektralscharen und somit P ⊆ P ′ . Hieraus wiederum folgt P ′ ⊇ P ′′ , was aber äquivalent zu
M′ ⊇ M′′ ist; wegen M′ = M′′′ ist dann M′′′ ⊇ M′′ ). In de Dormale/Gautrin
[11] wird gezeigt: Für einen Satz M kommutierender s.a. Operatoren gibt es genau
dann eine Spektraldarstellung, wenn M′′ maximal abelsch ist.
Wir haben nun zu zeigen, daß jeder Satz A := {Ai }i∈J kommutierender s.a. Operatoren so erweitert werden kann, daß die vom erweiterten Satz generierte v. NeumannAlgebra maximal abelsch ist. Hierzu stellen wir zunächst fest, daß die abelsche
v. Neumann-Algebra A′′ stets zu einer maximal abelschen v. Neumann-Algebra D erweitert werden kann (Siehe Dixmier [10], Seite 12, Proposition 12, bzw. [10], Seite 2).
D kann durch einen einzelnen beschränkten Operator B generiert werden: D = {B}′′
(Siehe J. von Neumann [31], Satz 10). Aus {B}′′ = D ⊇ A′′ folgt {B}′′′ ⊆ A′′′ und
somit {B}′ ⊆ A′ . Wegen B ∈ {B}′ ⊆ A′ kommutiert B mit allen Elementen aus A,
woraus folgt, daß (A ∪ {B})′′ abelsch ist; es gilt somit
(A ∪ {B})′′ ⊆ (A ∪ {B})′′′ .
Da außerdem
′′
′′
(A ∪ {B}) ⊇ {B} = {B}
′′′
′′′
⊇ (A ∪ {B}) ,
muß (A ∪ {B})′′ = (A ∪ {B})′′′ sein. QED.
Da jeder s.a. Operator A mit sich selbst kommutiert, gibt es für die einelementige
Menge {A} stets eine diagonalisierende Darstellung; jeder s.a. Operator A kann
somit über eine unitäre Transformation in einen v-Operator übergeführt werden. In
diesem Sinne stellen v-Operatoren bereits die allgemeinste Form von s.a. Operatoren
dar und man kann sich beim Studium s.a. Operatoren sehr oft auf die v-Operatoren
beschränken.
Definition 1.37 Einen Satz {Ai }i∈J kommutierender s.a. Operatoren nennt man
vollständig, wenn es eine Spektraldarstellung für {Ai }i∈J gibt.
Aus dem Beweis von Satz 1.30 folgt:
Satz 1.31 Jeder Satz {Ai }i∈J kommutierender s.a. Operatoren kann durch Hinzunahme eines selbstadjungierten beschränkten Operators B zu einem vollständigen
Satz {Ai }i∈J ∪ {B} kommutierender s.a. Operatoren erweitert werden.
Aus dem Beweis von Satz 1.28 erhält man:
44
KAPITEL 1. MATHEMATISCHE GRUNDLAGEN
Satz 1.32 Sind F (λ) und G(λ) zwei s.a. Multiplikationsoperatoren in L2 RI , µ , so
kommutieren sie.
Wir erwähnen noch, daß die Spektraldarstellung für einen gegebenen vollständigen Satz s.a. Operatoren nicht eindeutig bestimmt ist. Sei beispielsweise
T : E −→ L2 RI , µ
f 7−→ f (λ)
eine Spektraldarstellung für {Ai }i∈I . Ist α(λ) eine beliebige (meßbare) Funktion mit
|α(λ)| = 1, so ist
T ′ : E −→ L2 RI , µ
f 7−→ α(λ) f (λ)
ebenfalls eine Spektraldarstellung für {Ai }i∈I .
Eine diagonalisierende Darstellung für einen unvollständigen Satz s.a. Operatoren ist
natürlich erst recht nicht eindeutig bestimmt. Dennoch gilt folgender Satz:
Satz 1.33 Sei {Ai }i∈J ein Satz kommutierender s.a. Operatoren im Hilbertraum E
und sei
T : E −→ L2 RI , µ
f
7−→ f (λ)
eine diagonalisierende Darstellung, die die Operatoren Ai in die v-Operatoren λi
überführt (für i ∈ J). Sei ∆ eine meßbare Teilmenge von RI und
n
o
ˆ := λ ∈ RI (λi )
∆
∈
∆
.
i∈J
Dann ist für beliebiges f ∈ E die Größe
Z
2
Pf (∆) :=
|f (λ)| dµ(λ)
ˆ
λ∈∆
eindeutig definiert und hängt nur von f und ∆ ab, nicht aber von T .
m
Beweis: Man zeigt leicht, daß für festes f ∈ E und variables ∆ ⊆ RJ durch Pf (∆)
2
ein Maß auf RJ definiert ist (Wegen Pf RJ = kf k ist dieses Maß finit). Nach Seite
16 lassen sich alle meßbaren Teilmengen von RJ mit Hilfe von Mengen des Typs
n
o
m
∆ = (λi )i∈J ∈ RJ λk ∈ δ ,
k ∈ J, δ ⊆ R
(1.10)
generieren. Es genügt dann zu zeigen, daß Pf (∆) für alle ∆ der Form (1.10) unabhängig von T ist.
Sei Eδk m die Spektralschar von Ak für k ∈ J (Der Begriff der Spektralschar wird
δ ⊆R
im Abschnitt 3.3 definiert). Nach de Dormale/Gautrin [11], Lemma 5 ist
1 für λk ∈ δ
k −1
k
k
T Eδ T = χδ (λ) mit χδ (λ) =
.
0 für λk ∈
/δ
Folglich gilt für jedes ∆ der Form (1.10)
Z
2
2
Pf (∆) =
|f (x)| dµ(x) = Eδk f −1
λ∈πk
(δ)
QED.
...
unabhängig von T .
Kapitel 2
Die physikalischen Strukturen der
Quantenmechanik
2.1
Zustände und Observablen
2.1.1
Der Zustand in der klassischen Mechanik
Wir betrachten zunächst ein kleines Teilchen, das sich frei oder unter dem Einfluß
eines Kraftfeldes bewegt. Das Teilchen habe keine inneren Freiheitsgrade, insbesondere also keinen Spin. Ein wichtiges Beispiel für ein solches System ist das Elektron
im elektrischen Potential (genaugenommen hat das Elektron zwar einen Spin, doch
ist das, bei Abwesenheit von magnetischen Feldern, in guter Näherung vernachlässigbar).
Betrachten wir dieses System im Rahmen der klassischen Mechanik, so wird sich
das Elektron, mit dem Fortschreiten der Zeit, entlang irgend einer Bahn bewegen;
im System läuft also ein Prozeß ab. Hat man zwei identische Systeme (z. B. zwei
identische Kraftfelder mit jeweils einem Elektron darin), so ist es durchaus möglich,
daß in beiden Systemen zwei verschiedene Prozesse ablaufen. So kann z. B. das Teilchen des ersten Systems in Ruhe sein, während sich das Teilchen des zweiten Systems zunächst schnell bewegt und erst nach einiger Zeit zur Ruhe kommt. Welcher
der möglichen Prozesse in einem System abläuft, hängt von den Anfangsbedingungen ab, also von der Präparierung des Systems. Die Anfangsbedingungen können
beispielsweise festlegen, zu welchem Zeitpunkt, an welchem Ort und mit welcher
Geschwindigkeit das Teilchen ausgesetzt wurde.
Die verschiedenen Prozesse, die in einem gegebenen System ablaufen können,
nennen wir Zustände des Systems. Ein System verharrt demnach so lange in einem
Zustand, bis durch einen äußeren Eingriff ein neuer Zustand aufgezwungen wird.
Der Zustand wird häufig auch anders definiert, nämlich als die Gesamtheit aller momentanen Größen des Prozesses (momentaner Impuls, momentaner Ort, usw.). Man
hat dann für jeden Zeitpunkt einen neuen Zustand, auch dann, wenn es keinen äußeren Eingriff in das System gibt. Bei unserer Zustandsdefinition bleibt der Zustand
dagegen während der gesamten Zeit, die zwischen zwei äußeren Eingriffen liegt, konstant.
45
46
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Ein Systemzustand kann auf verschiedenste Weisen beschrieben werden. Eine
Möglichkeit ist die, für einen bestimmten Zeitpunkt t den Ort und die Geschwindigkeit des Teilchens anzugeben. Denn durch die Angabe der 6 Größen
xt , yt , zt , vxt , vyt , vzt ist der gesamte Prozeß vollständig charakterisiert: man kann
aus diesen Werten alle anderen physikalischen Größen wie etwa Energie und Drehimpuls berechnen und ist auch in der Lage die zeitliche Entwicklung aller Größen
vorauszuberechnen oder zurückzuverfolgen (denn das Kraftfeld wird ja als bekannt
vorausgesetzt). Der Systemzustand kann natürlich genausogut durch die Angabe
von xt′ , yt′ , zt′ , vxt′ , vyt′ , vzt′ erfolgen (mit t′ > t oder t′ < t), denn aus den Ortsund Geschwindigkeitswerten des Zeitpunktes t′ lassen sich die Orts- und Geschwindigkeitswerte des Zeitpunktes t ermitteln und umgekehrt (sofern zwischen t und t′
kein äußerer Eingriff erfolgt ist, sofern also das System zu den Zeitpunkten t und t′
im selben Zustand ist). Eine weitere Möglichkeit den Systemzustand zu beschreiben
besteht darin, xt , yt , zt , Lt , Lzt , Et für einen Zeitpunkt t anzugeben. E ist hierbei die
Energie, L der Betrag des Drehimpulses und Lz die z-Komponente des Drehimpulses.
2.1.2
Der Zustand in der Quantenmechanik
In der Quantenmechanik ist es nicht möglich, den Zustand durch Angabe von Ort
und Geschwindigkeit zu beschreiben, da das quantenmechanische Teilchen weder
einen genau definierten Aufenthaltsort hat, noch eine genau definierte Geschwindigkeit. Der quantenmechanische Zustand kann nicht durch die Angabe von ein paar
Zahlenwerten charakterisiert werden, sondern wird mit Hilfe einer Funktion beschrieben. So ist es z. B. möglich den Zustand des oben beschriebenen Einteilchensystems
durch Angabe einer Funktion aus L2 (R3 , µℓ ) zu beschreiben.
Wie bereits für die klassische Mechanik erwähnt, gibt es auch in der Quantenmechanik viele verschiedene Möglichkeiten einen Zustand zu beschreiben. Diese
verschiedenen Möglichkeiten haben aber eines gemeinsam, nämlich die HilbertraumStruktur:
Axiom 1 Zu jedem quantenmechanischen System gibt es einen separablen Hilbertraum IH, den wir abstrakten Hilbertraum nennen wollen. Jedem Systemzustand
entspricht ein Strahl in IH.
Die quantenmechanischen Zustände werden also durch Vektoren eines Hilbertraumes beschrieben, wobei aber zwei Vektoren, die in ein und demselben Strahl liegen,
den selben Zustand beschreiben. Unser Ziel, geeignete Beschreibungsmöglichkeiten
für die Systemzustände zu finden, kann jetzt auch so formuliert werden, daß wir
geeignete Beschreibungsmöglichkeiten für die Elemente aus IH finden wollen. Wir
müssen also den abstrakten
Hilbertraum IH mit Hilfe von konkreten Hilberträumen
I
der Form L2 R , µ darstellen. Der abstrakte Hilbertraum IH dient als rein theore-
tisches Konzept; konkrete Berechnungen werden mit den Funktionen aus L2 RI , µ
durchgeführt.
Die Vektoren aus IH nennen wir Zustandsvektoren und schreiben sie in der
Form |f i, d. h. wir verwenden für die Elemente aus IH die Diracsche Notation. Häufig
2.1. ZUSTÄNDE UND OBSERVABLEN
47
werden wir einfach vom ‘Zustand |f i’ sprechen und meinen damit jenen Zustand, der
dem Zustandsvektor |f i zugeordnet ist. Hierbei setzen wir immer voraus (ohne es
explizit zu erwähnen), daß |f i vom Nullvektor verschieden ist (Denn der Nullvektor
definiert keinen eindeutigen Strahl und somit auch keinen Zustand). Meistens werden
wir der Bequemlichkeit halber kf k = 1 wählen.
Axiom 1 besagt, daß es für jeden Systemzustand einen eindeutigen Strahl in IH gibt.
Das wirft natürlich die Frage auf, ob auch die Umkehrung gilt, ob es also zu jedem
Strahl aus IH einen zugehörigen Zustand gibt. Für alle in dieser Arbeit vorkommenden Systeme kann diese Frage uneingeschränkt bejaht werden. Das gilt ganz allgemein
für alle Systeme mit fester Teilchenzahl und somit im gesamten Bereich der nichtrelativistischen Quantenmechanik. Systeme mit variabler Teilchenzahl, wie sie in der
Quantenfeldtheorie vorkommen, weichen aber von diesem Schema ab: es kann bei solchen Systemen Strahlen aus IH geben, die keinem physikalisch realisierbaren Zustand
entsprechen (superselection rules).
Für ein korrektes Verständnis des quantenmechanischen Zustandsbegriffes ist es
noch notwendig, festzustellen, daß eine Messung am quantenmechanischen System
immer einen äußeren Eingriff darstellt, der das System i. allg. in einen neuen Zustand
überführt.
2.1.3
Observablen (Meßgrößen)
Unter einer einfachen Meßapparatur A für ein quantenmechanisches System S
verstehen wir eine Apparatur, die an diesem System eine Messung ausführen kann
und dabei als Ergebnis eine reelle Zahl liefert. Betrachten wir beispielsweise ein
System, das aus einem frei beweglichen Teilchen besteht, so gibt es eine einfache
Meßapparatur Xt , die, zu einem festen Zeitpunkt t, die x-Komponente des Ortes
dieses Teilchens messen kann. Sind t1 und t2 zwei verschiedene Zeitpunkte, so sind
Xt1 und Xt2 zwei verschiedene Meßapparaturen.
Wir nennen diese Meßapparaturen ‘einfach’, um zu betonen, daß sie nur eine
reelle Zahl als Meßergebnis liefern und nicht mehrere. Eine Apparatur mit der die
x-, y- und z- Komponenten des Ortes eines Teilchens (zum Zeitpunkt t) gemessen
werden können, stellt demnach keine einfache Meßapparatur dar, da sie ein Meßergebnis liefert, das aus 3 reellen Zahlen besteht. Man kann sich diese Apparatur aber
aus 3 einfachen Meßapparaturen Xt , Yt, Zt zusammengesetzt denken.
Eine Apparatur, die mißt, ob sich ein Teilchen (zu einem festen Zeitpunkt t) in
einem bestimmten Raumbereich ∆ ⊆ R3 befindet, liefert als Ergebnis den Wert ‘Ja’
oder den Wert ‘Nein’. Um der Forderung nach reellwertigen Meßergebnissen gerecht
zu werden, identifizieren wir das Ergebnis ‘Ja’ mit der Zahl 1 und das Ergebnis ‘Nein’
mit der Zahl 0. Dieser Übergang von Ja/Nein auf 1/0 ist keine sinnlose Spielerei,
sondern ist notwendig, damit man immer Mittelwerte bilden kann.
Wir betrachten jetzt den Fall daß an einem System S mittels einer einfachen
Meßapparatur A eine Messung durchgeführt wird, die ein Ergebnis a ∈ R liefert.
Das Meßergebnis a hängt natürlich vom Systemzustand |f i ∈ IH ab, ist aber durch
diesen i. allg. nicht eindeutig bestimmt. D. h. zu einem festen Zustand |f i kann die
Meßapparatur A verschiedene mögliche Meßwerte liefern; welcher Wert sich letztlich
48
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
bei einer konkreten Versuchsdurchführung wirklich ergibt, ist bis zu einem gewissen
Grad zufällig (In diesem Sinne sind quantenmechanische Messungen indeterministisch: ein fester Ausgangszustand führt nicht zwangsläufig zu einem bestimmten —
vorhersehbaren — Meßergebnis). Bei gegebenem |f i kann aber für die Apparatur A
eine statistische Meßwertverteilung PfA (∆) angegeben werden:
PfA (∆) = Wahrscheinlichkeit für a ∈ ∆,
m
∆ ⊆ R.
Zu jeder einfachen Meßapparatur A und zu jedem Zustand |f i ∈ IH gibt es eine
eindeutige Verteilung PfA (∆). Stimmen zwei einfache Meßapparaturen A und B für
alle |f i ∈ IH in ihren Meßwertverteilungen überein, d. h.
m
∀ |f i ∈ IH : ∀∆ ⊆ R : PfA (∆) = PfB (∆) ,
so sind A und B als äquivalent anzusehen, da sie effektiv dieselbe Messung
durchführen (wenngleich die Apparate A und B möglicherweise einen stark unterschiedlichen technischen Aufbau haben). Es ist dann nicht notwendig zwischen
diesen beiden Apparaturen zu unterscheiden.
Die Tatsache, daß es für einen Apparat A bei gegebenem Systemzustand |f i nicht
möglich ist, den Meßwert a exakt vorherzusagen, bezeichnet man oft als Unschärfe
von A. Diese Unschärfe entsteht zum einen durch die quantenmechanische Natur des
Systems S an dem die Messung durchgeführt wird; darüber hinaus kann sie aber
noch verstärkt werden durch eine Unschärfe, die in der Meßapparatur entsteht. Das
ist insbesondere dann der Fall, wenn Teile der Meßapparatur quantenmechanisches
— und damit indeterministisches — Verhalten aufweisen, was bei bestimmten Meßstreuungen und Meßumwandlungen prinzipiell unvermeidlich ist (Siehe z. B. Ludwig [25], Abschnitte XII.1, XII.2). Für die meisten Fragestellungen reicht es aber
aus, nur solche Meßapparaturen zu betrachten, die von sich aus keine zusätzliche
Unschärfe einbringen und in diesem Sinne maximal scharf sind.
Exakt kann man den Begriff der maximal scharfen Meßapparatur wie folgt definieren:
Eine einfache Meßapparatur ist maximal scharf, wenn es keine (von A verschiedene)
einfache Meßapparatur A′ gibt, sodaß
m
′
∀ |f i ∈ IH : ∀∆ ⊆ R : PfA (∆) = 0 =⇒ PfA (∆) = 0 .
Die Unschärfe einer maximal scharfen Meßapparatur kann also von keiner anderen
Meßapparatur unterboten werden; in diesem Sinne ist diese Unschärfe vollständig
dem System S selbst zuzuschreiben und nicht der Meßapparatur. Der Extremfall
einer nicht maximal scharfen Apparatur ist ein Gerät, das eigentlich nichts mißt
und irgend einen (zufälligen) reellen Wert als ‘Meßergebnis’ liefert. Ein wesentlich
realistischeres Beispiel für eine nicht maximal scharfe Meßapparatur ist durch eine
Anordnung gegeben, die mißt, ob ein Teilchen 1, das zum System S gehört, einen
Auffangschirm erreicht, nachdem es mit einem Teilchen 2 (das der Meßapparatur
zugerechnet wird) kollidiert ist (Die durch die Quantennatur des Teilchens 2 bedingte
Unschärfe bringt zusätzliche Unsicherheit in die Messung).
Zweifellos haben die maximal scharfen Meßapparaturen einen wesentlich fundamentaleren Charakter als allgemeine Meßapparaturen und letztere werden oft nur gebaut, um maximal scharfe Apparaturen zu approximieren. Aus diesem Grund ist es
2.1. ZUSTÄNDE UND OBSERVABLEN
49
meistens gerechtfertigt, nur maximal scharfe Meßapparaturen zu betrachten; man
muß sich aber vor Augen halten, daß die tatsächlich eingesetzten Meßapparaturen
i. allg. nicht maximal scharf sind, auch dann nicht, wenn sie mit maximaler Präzision
gebaut wurden (Denn die durch eine solche Apparatur eingebrachte Unschärfe entsteht nicht durch mangelnde Präzision des Meßgerätes, sondern hat ihren Ursprung im
verwendeten Meßprinzip). Eine Analyse allgemeiner (also auch nicht notwendigerweise maximal scharfer) Meßapparaturen findet der Leser beispielsweise in G. Ludwig
[25] oder in anderen Arbeiten desselben Autors (Unserem Begriff der maximal scharfen Meßapparatur entspricht bei Ludwig der Begriff der Entscheidungsobservable).
Eine quantenmechanische Meßgröße ist etwas, das einer einfache Meßapparatur
entspricht, wobei aber zwei äquivalente Meßapparaturen ein- und dieselbe Meßgröße
definieren (Eine Meßgröße entspricht in diesem Sinne einer ganzen Klasse äquivalenter Meßapparaturen). Eine Meßgröße, die durch eine maximal scharfe Meßapparatur
definiert wird, bezeichnen wir als Observable. Wichtige Observablen des Einteilchensystems sind beispielsweise:
- die Orts-Observablen Xt , Yt , Zt
- die Impuls-Observablen Pxt , Pyt , Pzt
- die Energie-Observable Ht .
Normalerweise hängen diese Observablen von der Zeit t ab, d. h. man hat für jeden
Zeitpunkt t eine eigene Observable, die sich von jener des Zeitpunktes t′ unterscheidet.
Axiom 2 Ist IH der abstrakte Hilbertraum eines quantenmechanischen Systems, so
entspricht jeder Observable dieses Systems umkehrbar eindeutig ein s.a. Operator in
IH.
Den s.a. Operator, der einer Observablen entspricht, werden wir ebenfalls als Observable bezeichne, da keine Veranlassung besteht, zwischen der Meßgröße und dem
entsprechenden s.a. Operator zu unterscheiden.
Obiges Axiom besagt, daß es zu jeder Observablen einen zugehörigen s.a. Operator
gibt. Dies wirft natürlich die Frage auf, ob auch die Umkehrung gilt, ob also jedem
s.a. Operator eine Observable entspricht. Für alle in dieser Arbeit vorkommenden
Systeme kann diese Frage uneingeschränkt bejaht werden1 . Für Systeme mit superselection rules, wie sie in der Quantenfeldtheorie von Bedeutung sind, ist obige Frage
dagegen negativ zu beantworten: es gibt s.a. Operatoren, denen keine Observablen
entsprechen (siehe z. B. Bogolubov/Logunov/Todorov [5], Seite 126).
1
Natürlich gilt das nur im Prinzip. Etwas exakter könnte man sagen, daß für jeden s.a. Operator eine zugehörige Meßapparatur in beliebig guter Näherung gebaut werden könnte, falls ein
hinreichend großer technischer Aufwand getrieben würde.
50
2.1.4
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Die statistische Interpretation
Definition 2.1 Sei {Ai }i∈J eine Menge von Observablen eines quantenmechanischen Systems. Die Observablen heißen kompatibel, wenn sie zusammen gemessen
werden können.
D. h. man kann für kompatible Observablen Ai (im Prinzip) eine Apparatur bauen,
die an ein und demselben System alle Ai mißt, ohne daß sich diese Messungen gegenseitig beeinflussen (D. h. bei mehrfacher Durchführung des Experimentes ergibt sich
für jede Observable Ai genau jene statistische Meßwertverteilung, die man erhält,
wenn man Ai alleine mißt).
Oft wird an Stelle von ‘zusammen meßbar’ auch der Begriff ‘gleichzeitig meßbar’
verwendet, was aber nicht ganz korrekt ist: Die x-Komponente des Ortes zum Zeitpunkt t1 und die y-Komponente des Ortes zum Zeitpunkt t2 sind zwei kompatible
Observablen und sind demnach zusammen meßbar. Bei t1 6= t2 ist es aber nicht
sinnvoll von gleichzeitiger Messung zu sprechen.
Axiom 3 Observablen sind genau dann kompatibel, wenn die entsprechenden selbstadjungierten Operatoren kommutieren.
Axiom 4 (Statistische Interpretation) Sei IH der abstrakte Hilbertraum des
quantenmechanischen Systems. Sei {Ai }i∈I ein vollständiger Satz kommutierender
Observablen und
T : IH −→ L2 RI , µ
(2.1)
|f i 7−→ f (λ)
eine entsprechende Spektraldarstellung. Das System sei im Zustand |f i ∈ IH (mit
kf k = 1), und ∆ sei eine (meßbare) Teilmenge von RI . Dann ist die Wahrscheinlichkeit, bei einer gemeinsamen Messung der Observablen Ai ein Meßergebnis aus
∆ zu erhalten, gegeben durch
Z
P (∆) =
|f (λ)|2 dµ(λ) .
(2.2)
λ∈∆
Hat man dagegen einen unvollständigen Observablen-Satz {Ai }i∈J , für den (2.1) eine
diagonalisierende Darstellung ist, dann ist die Wahrscheinlichkeit für ein Meßergebm
nis aus ∆ ⊆ RJ gegeben durch
Z
P (∆) =
|f (λ)|2 dµ(λ)
ˆ
λ∈∆
n
o
ˆ = λ ∈ RI (λi ) ∈ ∆ .
mit ∆
i∈J
Beispiel 2.1 Sei A eine Observable. Gesucht sei die Wahrscheinlichkeit dafür, bei einer Messung
von A einen Wert aus dem Intervall [0, 1] zu erhalten. Sei
St : IH −→ L2 R3 , µℓ
|f i 7−→ f (λ1 , λ2 , λ3 )
51
2.2. DAS EINTEILCHENSYSTEM OHNE SPIN
eine unitäre Transformation, die A zum v-Operator λ1 macht. Setzt man
ˆ := [0, 1] × R × R = (λ1 , λ2 , λ3 ) ∈ R3 λ1 ∈ [0, 1] ,
∆
so hat man mit
P ([0, 1]) =
Z
2
|f (λ)| dµℓ (λ)
ˆ
λ∈∆
die gewünschte Wahrscheinlichkeit gefunden.
Obiges Axiom ist natürlich nur dann sinnvoll, wenn P (∆) durch |f i und ∆ eindeutig
bestimmt ist und somit nicht von T abhängt. Aus Satz 1.33 ergibt sich aber, daß
diese Eindeutigkeit immer gegeben ist.
2.2
2.2.1
Das Einteilchensystem ohne Spin
Orts- und Impuls-Observablen
Im Einteilchensystem gibt es naheliegenderweise 3 Orts-Observablen X, Y, Z und
3 Impuls-Observablen Px , Py , Pz (Da es für jeden Zeitpunkt t eigene Observablen
gibt, ist es korrekter Xt , Yt , Zt , bzw. Pxt , Pyt , Pzt zu schreiben). Um diese Meßgrößen
exakt zu definieren müßte man entsprechende Meßapparaturen angeben, mit denen man diese Größen messen kann. Wir werden uns aber mit einer eher intuitiven Charakterisierung begnügen, die auf Vorstellungen der klassischen Mechanik
aufbaut. Die Ortsmeßgrößen entsprechen im wesentlichen jenen der klassischen Mechanik. Die Impulsmeßgrößen ähneln dagegen nur dann den Impulsmeßgrößen der
klassischen Mechanik, wenn das quantenmechanische System durch das Modell des
klassischen Teilchens approximiert werden kann2 . In manchen Experimenten gleicht
das quantenmechanische System aber eher einem klassisches Wellenfeld (“WelleTeilchen-Dualismus”). Dann entspricht der quantenmechanische Impuls dem, was
im klassischen Modell der Wellenvektor ist (Näheres hierzu siehe Abschnitt 2.2.3).
2.2.2
Die Schrödinger-Darstellung
Satz 2.1 Der Operator
1 ∂
: C0∞ (Rn ) −→ L2 (Rn , µℓ ) ,
j ∂xi
1 ∂
f (x1 , . . . , xn ) 7−→
f (x1 , . . . , xn )
j ∂xi
i ∈ {1, 2, . . . , n}
2
Genaugenommen ähnelt der quantenmechanische Impuls nicht dem klassischen Linearimpuls
(=Masse · Geschwindigkeit), sondern dem sogenannten generalisierten (oder kanonisch konjugierten) Impuls, der in der Hamiltonschen Formulierung der klassischen Mechanik auftritt. Beim Teilchen im Potential stimmen Linearimpuls und generalisierter Impuls überein. Beim Teilchen im
elektromagnetischen Feld ist dagegen
pg = pℓ + qA,
wobei pg = (pgx , pgy , pgz ) der generalisierte Impuls ist, pℓ = (pℓx , pℓy , pℓz ) = (mẋ, mẏ, mż) der
Linearimpuls und A = (Ax , Ay , Az ) das elektromagnetische Vektorpotential; m und q sind Masse
und Ladung des Teilchens (Siehe z. B. Jelitto [23], Seite 6).
52
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
ist e.s.a. und definiert somit einen eindeutigen s.a. Operator in L2 (Rn , µℓ ), den wir
mit 1j ∂xi oder mit 1j ∂i bezeichnen wollen.
Der Definitionsbereich von 1j ∂i kann über Satz 1.19 bestimmt werden. Er umfaßt
alle Funktionen f (x) ∈ L2 (Rn , µℓ ) die eine ‘einigermaßen vernünftig’ definierbare
Ableitung 1j ∂x∂ i f (x) besitzen, die wieder in L2 (Rn , µℓ ) liegt.
Axiom 5 Seien Xt , Yt , Zt , Pxt , Pyt , Pzt die Orts- und Impuls-Observablen (für den
Zeitpunkt t) des Einteilchensystems ohne Spin. Dann gibt es eine unitäre Transformation
St : IH −→ L2 R3 , µℓ
|f i 7−→ ft (x) = ft (x, y, z) ,
der obige Observablen wie folgt transformiert:
St Xt St−1
St Yt St−1
St Zt St−1
St Pxt St−1
St Pyt St−1
St Pzt St−1
=
=
=
=
=
=
X
Y
Z
Px
Py
Pz
= v-Operator x
= v-Operator y
= v-Operator z
= 1j ∂x
= 1j ∂y
= 1j ∂z .
Wir nennen St die Schrödinger-Darstellung (für den Zeitpunkt t) und ft (x) eine
Schrödinger-Funktion.
Die Funktion ft (x) als Funktion in x und t wird oft auch Wellenfunktion genannt.
Die Schrödinger-Darstellung ist offenbar eine Spektraldarstellung für {Xt , Yt , Zt }
(Diese Operatoren bilden somit einen vollständigen Satz kommutierender Observablen). Aus diesem Grund wird die Schrödinger-Darstellung auch Ortsdarstellung
genannt. Es muß aber betont werden, daß St durch die Eigenschaft, eine Spektraldarstellung für {Xt , Yt , Zt } zu sein, noch nicht eindeutig bestimmt ist (siehe Seite
44); erst durch die zusätzliche Festlegung der Struktur der Impuls-Observablen ist
die Schrödinger-Darstellung eindeutig definiert.
Aus der Tatsache, daß St eine Spektraldarstellung für die Orts-Observablen ist,
läßt sich über Axiom 4 sofort eine physikalische Interpretation von ft (x) angeben:
ist das System in dem durch die Schrödinger-Funktion ft (x) beschriebenen Zustand,
so ist
Z
P (∆) =
|ft (x)|2 dµℓ (x)
x∈∆
die Wahrscheinlichkeit dafür, daß bei einer Ortsmessung zum Zeitpunkt t das Teilchen im Raumbereich ∆ ⊆ R3 angetroffen
R wird (wobei wir — entsprechend der
Forderung kf k = 1 — die ‘Normierung’ |ft (x)|2 dµℓ (x) = 1 voraussetzen). Kennt
man also ft (x), so kann man direkt alle ‘Ortswahrscheinlichkeiten’ für den Zeitpunkt
2.2. DAS EINTEILCHENSYSTEM OHNE SPIN
53
t ermitteln: |ft (x)|2 ist unmittelbar die ‘Ortswahrscheinlichkeitsdichte’ für den Zeitpunkt t.
Da ft (x) über St den Zustandsvektor |f i — und damit den Systemzustand —
eindeutig bestimmt, müssen in ft (x) alle Informationen über den Systemzustand
enthalten sein. Tatsächlich lassen sich aus ft (x) die Wahrscheinlichkeitsverteilungen
aller Meßgrößen ermitteln. So ist es z. B. möglich, von ft (x) auf ft′ (x) zu schließen; aus ft′ (x) kann dann unmittelbar die Wahrscheinlichkeitsverteilung der OrtsObservablen des Zeitpunktes t′ ermittelt werden. Der Übergang von ft (x) auf ft′ (x)
wird durch die Zeitentwicklung des Systems festgelegt, die in Abschnitt 2.5 noch
näher behandelt wird. Vorläufig werden wir uns damit auseinandersetzen, wie aus
ft (x) die Wahrscheinlichkeitsverteilung für die Impuls-Observablen (des Zeitpunktes
t) gewonnen werden kann.
Definition 2.2 Der Operator F sei wie folgt definiert:
mit
F : L2 (Rn , µℓ ) −→ L2 (Rn , µℓ )
f (x) 7−→ fe p
1
fe p = √ n
2π
Z
f (x) e−j (x·p) dµℓ (x) .
F heißt (n-dimensionale) Fourier-Transformation und ist (wie sich zeigen läßt)
eine unitäre Transformation.
Es läßt sich zeigen, daß F die Operatoren 1j ∂i in die v-Operatoren pi überführt
(also F 1j ∂i F−1 = pi ). Hieraus folgt offenbar:
Satz 2.2 Sei Πt := FSt das Produkt aus Schrödinger-Darstellung und FourierTransformation. Dann ist
Πt : IH −→ L2 R3 , µℓ
|f i 7−→ fet p = fet (px , py , pz )
eine Spektraldarstellung für die Impuls-Observablen Pxt , Pyt , Pzt . Wir nennen Πt die
Impulsdarstellung (für den Zeitpunkt t).
Konkret heißt das: um aus der Schrödinger-Funktion ft (x) die Impulsverteilung zu
ermitteln, bildet man zunächst die Fourier-Transformierte
fet p = Fft (x) .
Durch |fe p |2 ist dann die Wahrscheinlichkeitsdichte für die Impuls-Observablen
gegeben3 .
Umgekehrt kann natürlich auch ft (x) aus fet p ermittelt werden: wie sich zeigen
läßt, hat die inverse Fourier-Transformation F−1 die Gestalt
Z
1
−1 e
f (x) = F ft p = √ 3 fet p e+j (p·x) dµℓ p .
2π
2
R
Wobei wir wieder fet p dµℓ p = 1 voraussetzen
R
2
(oder äquivalent dazu: |ft (x)| dµℓ (x) = 1).
3
54
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
2.2.3
Eigenschaften des quantenmechanischen Impulses
Sei die Funktion fet p = Πt |f i derart, daß sie nur in einer unmittelbaren Umgebung
von p̂ von Null verschieden ist (Scharf bestimmter Impuls). Aus ft (x) = F−1 fet p
ist ft (x) wellenförmig mit einem (mittlerem) Wellenvektor
k ≈ p̂
(k · ~ ≈ p̂).
(2.3)
Je schärfer der Impuls bestimmt ist, desto größer ist die Ähnlichkeit von ft (x) mit
der ebenen Welle a(t) ejk·x (Insbesondere folgt daraus, daß bei scharf bestimmten
Impuls die Funktion ft (x) weit ausgedehnt ist, was offenbar eine große Ortsunschärfe
nach sich zieht. Dies führt zur sogenannten Ort-Impuls Unschärferelation, die wir
im Abschnitt 2.6.2 noch genauer quantifizieren werden). Der quantenmechanische
Impuls tritt somit in vielen Experimenten als Wellenvektor in Erscheinung (Betrag
2π
des Wellenvektors = Wellenlänge
). Da Teilchen mit kleiner Masse i. allg. einen kleinen
Impuls haben (und damit verbunden eine kleine absolute Impulsunschärfe), tritt die
oben beschriebene ‘Wellenerscheinung’ besonders bei leichten Teilchen wie Photonen
oder Elektronen auf.
Neben dem soeben beschriebenen ‘Wellenvektor-Charakter’ besitzt der quantenmechanische Impuls auch jene Eigenschaft, die man aus der klassischen Mechanik
kennt4 :
p̂ ≈ mv.
(2.4)
Hierbei ist m die Masse des Teilchens und v die mittlere (Gruppen- ) Geschwindigkeit, mit der sich das Wellenpaket ft (x) im Raum weiter bewegt (Dieser Sachverhalt
läßt sich mit Hilfe der Zeitentwicklungsaxiome von Abschnitt 2.5 herleiten). Da
man bei einer großen Masse i. allg. ein gut definiertes v hat, tritt (2.4) besonders
bei schweren Teilchen in Erscheinung. Bei leichten Teilchen ist somit der ‘Wellenaspekt’ (2.3) vorherrschend, bei schweren Teilchen dagegen der ‘Teilchenaspekt’ (2.4)
(‘Welle-Teilchen Dualismus’).
4
Wir setzen hier voraus, daß ein System vorliegt, in dem der generalisierte Impuls gleich dem
Linearimpuls (also gleich mv) ist. Im allgemeineren Fall ist der quantenmechanische Impuls mit
dem generalisierten Impuls der klassischen Mechanik zu vergleichen (siehe Fußnote von Seite 51)
55
2.3. DAS EINTEILCHENSYSTEM MIT SPIN
2.3
2.3.1
Das Einteilchensystem mit Spin
Der Begriff des Spins
Axiom 6 Der Spin s eines Teilchens ist eine Art Eigendrehimpuls. Er ist für jedes Teilchen fest, d. h. er ist — ähnlich der (Ruhe-) Masse des Teilchens — eine
Größe, die für eine bestimmte Teilchenart charakteristisch ist. Es gibt 2 Gruppen
von Teilchen:
1) Fermionen haben halbzahligen Spin, d. h. es ist s = k + 21 ,
2) Bosonen haben ganzzahligen Spin, d. h. es ist s = k,
k = 0, 1, 2, . . ..
k = 0, 1, 2, . . ..
So ist z. B. bei Elektronen, Protonen, Neutronen und Neutrinos s = 12 (Fermionen).
Für Photonen ist s = 1 und für π-Mesonen ist s = 0 (Bosonen).
Entlang einer beliebigen räumlichen Achse gibt es 2s + 1 Einstellmöglichkeiten
für die Spin-Komponente σ:
σ = −s, −s + 1, −s + 2, . . . , s − 1, s
(Beachte: s ist eine konstante Teilcheneigenschaft, σ dagegen ein variabler physikalischer Meßwert5 ).
Ein Teilchen mit Spin kann man sich als eine rotierende Kugel vorstellen; die
Rotationsgeschwindigkeit dieser Kugel — und damit den Betrag des Drehimpulses
— muß man sich aber als fest vorstellen (entspricht der Tatsache, daß die Zahl s für
ein gegebenes Teilchen fest ist). Variabel ist dagegen die Ausrichtung der Drehachse
und damit die Größe der Drehimpuls-Komponente, die entlang einer festen Achse
abfällt. Die Größe dieser Komponente entspricht dem σ. Obiges Axiom beinhaltet die
bemerkenswerte Aussage, daß die Größe σ nur die diskreten Werte −s, −s + 1, . . . , s
annehmen kann.
Mit σz bezeichnen wir die Spin-Komponente entlang der z-Achse und nennen
sie auch z-Komponente des Spins. Wir werden im Folgenden meistens die SpinKomponente entlang des z-Achse betrachten, obwohl wir genausogut jede andere
Achse nehmen könnten.
Beim klassischen Modell einer elektrisch geladenen rotierenden Kugel ist mit
der Rotation stets ein magnetisches Moment verknüpft. Ähnliches gilt auch für das
quantenmechanische Teilchen:
Axiom 7 Der Spin eines Teilchens ist mit einem magnetischen Moment verknüpft:
ist σz die z-Komponente des Spins, und Mz die z-Komponente des magnetischen
Momentes6 , so ist:
Mz = g · σz .
5
Häufig wird auch der Wert σ als ‘Spin’ bezeichnet. Um ihn aber von s zu unterscheiden, wollen
wir σ immer ‘Spinkomponente’ nennen.
6
Zusätzlich kann es noch ein magnetisches Moment geben, das mit dem Bahndrehimpuls des
Teilchens (also mit der Bewegung des Teilchens im Raum) verknüpft ist. Dieses Moment wollen
wir hier außer acht lassen
56
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
g ist eine von der Teilchenart abhängige Konstante. Für das Elektron ist in sehr guter Näherung g = − mee , wobei e die Elementarladung ist (e ≈ 1.6 · 10−19 C) und me
die Masse des Elektrons (siehe z. B. [40], Seite 166). Für das Proton ist g = 2.795 mep ,
wobei e wieder die Elementarladung ist und mp die Masse des Protons. Das Neutron
hat keine Ladung und dürfte somit nach klassischen Vorstellungen kein magnetisches Moment besitzen. Tatsächlich hat aber auch das Neutron ein magnetisches
Moment und zwar mit g = −0.96 men . Hierbei ist mn die Masse des Neutrons und e
Elementarladung (siehe z. B. [7], Seite 265).
Da man sich bei der Formulierung der Quantenmechanik nicht bedenkenlos auf Begriffe der Klassischen Physik stützen darf, müßte man bei den beiden letzten Axiomen
präzisieren, was man unter Drehimpuls und magnetischem Moment versteht. Diese
Präzisierung kann durch die Beschreibung von Meßapparaturen erfolgen: man gibt
an, wie die Größen σz und Mz zu messen sind und definiert dadurch ihre physikalische Bedeutung. Wir wollen hier nicht näher darauf eingehen und uns lediglich auf
die Feststellung beschränken, daß die Messung von σz über die Drehimpulserhaltung
erfolgen kann (z. B. Einstein – de Haas Effekt), und jene von Mz über die Ablenkung
des Teilchens im elektromagnetischen Feld. Da der Faktor g für eine gegebene Teilchenart konstant ist, ist es aber für viele Überlegungen unnötig zwischen σz und Mz
zu unterscheiden.
2.3.2
Die Schrödinger-Darstellung für das Teilchen mit Spin
Den Zustand des Teilchen ohne Spin konnten wir durch Schrödinger-Funktionen der
Gestalt
f (r) = f (x, y, z) ∈ L2 R3 , µℓ
(2.5)
beschreiben. Beim Teilchen mit Spin tritt an Stelle von (2.5) ein ganzes Funktionstupel:
fs (r)
fs−1 (r)
f(r) =
(2.6)
, mit fσz (r) ∈ L2 R3 , µℓ .
..
.
f−s (r)
Um eine formale Analogie zu Axiom 5 herstellen zu können, werden wir (2.6) in eine
andere Form bringen. Wir führen hierzu folgende Funktion ein:
x
z }| {
f (x) = f(x, y, z , σz ) = f (r, σz ) := fσz (r) .
| {z }
r
Legt man fest, daß σz nur die diskreten Werte −s, −s + 1, . . . , s annehmen darf,
so entspricht die Funktion f (x) offensichtlich genau dem Tupel aus (2.6). Die Einschränkung σz ∈ {−s, −s + 1, . . . , s} kann auch so formuliert werden, daß man
fordert
f (x) ∈ L2 R4 , µsℓ
57
2.3. DAS EINTEILCHENSYSTEM MIT SPIN
mit
µsℓ (∆) =
s
X
σz =−s
µℓ (∆σz ) ,
∆σz = r ∈ R3 (r, σz ) ∈ ∆} .
(2.7)
Die Punkte x ∈ R4 mit σz ∈
/ {−s, −s + 1, . . . , s} bilden bezüglich µsℓ eine Nullmenge
und sind daher für die Funktion uninteressant: zwei Funktionen f1 (r, σz ) , f2 (r, σz ),
die sich nur für σz ∈
/ {−s, −s + 1, . . . , s} voneinander unterscheiden, sind (bez. µsℓ )
a.e. gleich, und stellen somit dasselbe Element aus L2 (R4 , µsℓ ) dar. Man hat also
eine umkehrbar eindeutige Entsprechung zwischen den Elementen aus L2 (R4 , µsℓ )
und den Funktionstupeln (2.6). Das Skalarprodukt in L2 (R4 , µsℓ ) hat die Form
hf | gi =
Z
f (r, σz )g(r, σz ) dµsℓ (r, σz ) =
Z
s
X
fσz (r)gσz (r) dµℓ (r) .
σz =−s
Im Folgenden werden wir uns auf den Fall s = 21 beschränken; der allgemeine Fall kann aber ganz analog behandelt werden. Bei s = 12 entspricht jedes f (x) ∈ L2 (R4 , µsℓ ) umkehrbar eindeutig einem Paar (f+ 1 (r) , f− 1 (r) ) mit
2
2
f± 1 (r) ∈ L2 (R3 , µℓ ). Es ist aber üblich, an Stelle der Indizes + 12 , − 12 die Symbo2
le ↑, ↓ zu verwenden. Wir haben somit die Entsprechung
f↑ (r)
f (x) = f (r, σz ) ←→ f(r) =
.
f↓ (r)
Ein linearer Operator A in L2 (R4 , µsℓ ) bildet Spaltenvektoren des Typs f(r) wieder
auf Spaltenvektoren desselben Typs ab. Aus der Linearität von A folgt, daß man A
als Matrix darstellen kann:
g↑ (r)
A↑↑ A↑↓
f↑ (r)
g(x) = Af (x) ←→
=
·
.
g↓ (r)
A↓↑ A↓↓
f↓ (r)
Für die rechts stehende Matrizen-Gleichung schreiben wir auch
A↑↑ A↑↓
g(r) = Af (r) , mit A =
.
A↓↑ A↓↓
Die 4 Matrix-Elemente von A sind offenbar lineare Operatoren in L2 (R3 , µℓ ).
In L2 (R4 , µsℓ ) gibt es 4 v-Operatoren x, y, z, σz . In Matrix-Form erhalten diese
die Gestalt
1 1 0
x 0
y 0
z 0
,
,
,
.
0 x
0 y
0 z
2 0 −1
Die in den Matrizen auftretenden Operatoren x, y, z sind die v-Operatoren von
L2 (R3 , µℓ ); 1 ist der Einheitsoperator in L2 (R3 , µℓ ).
Nun sind wir in der Lage, das grundlegende Axiom für das Einteilchensystem
mit Spin zu formulieren:
58
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Axiom 8 Seine Xt , Yt , Zt , Pxt , Pyt , Pzt, Σxt , Σyt , Σzt die Observablen für die Orts-,
Impuls- und Spin-Komponenten (des Zeitpunktes t) im Einteilchensystem mit Spin
1
. Dann gibt es eine unitäre Transformation
2
St : IH −→ L2 R4 , µsℓ
|f i 7−→ ft (x) = ft (x, y, z, σz ) ,
der obige Observablen wie folgt transformiert:
−1
S t Xt S t = X = x
...
X =
−1
St Y t St = Y = y
...
Y =
−1
St Z t St = Z = z
...
Z =
−1
1
St Σzt St = Σz = σz
...
Σz = 2
St Σxt St−1 = Σx
...
Σx =
St Σyt St−1 = Σy
...
Σy =
St Pxt St−1 = Px =
1 ∂
j ∂x
...
Px =
St Pyt St−1 = Py =
1 ∂
j ∂y
...
Py =
St Pzt St−1 = Pz =
1 ∂
j ∂z
...
Pz =
0
x
0
v-Operatoren
y in L2 (R4 , µsℓ )
0
z
0
−1 0 1
1
2
1 0 0 −j
1
2
j 0
1
∂
0
j x
0 1j ∂x
1
∂
0
j y
0 1j ∂y
1
∂
0
j z
0 1j ∂z
x
0
y
0
z
0
1
0
.
Wir nennen St Schrödinger-Darstellung und ft (x) Schrödinger-Funktion.
Die Spin-Observablen sind offenbar beschränkt und somit überall definiert.
Px ist
1
1
4
für all jene f (r, σz ) ∈ L2 (R , µsℓ ) definiert, für die f r, + 2 und f r, − 2 im Definitionsbereich von 1j ∂x liegen (analoges gilt für Py und Pz ).
{Xt , Yt , Zt , Σzt } ist offensichtlich ein vollständiger Satz kommutierender Observablen (Natürlich läßt sich zeigen, daß auch {Xt , Yt , Zt , Σxt } und {Xt , Yt , Zt , Σyt }
vollständige Sätze kommutierender Observablen sind, denn die z-Achse ist ja durch
nichts ausgezeichnet und wurde in unserer Schrödinger-Darstellung ganz willkürlich
bevorzugt). Auch {Pxt , Pyt , Pzt , Σzt } ist ein vollständiger Satz kommutierender Observablen: eine entsprechende Spektraldarstellung erhält man aus der SchrödingerDarstellung über die (3-dimensionale) Fourier-Transformation:
fe(px , py , px , σz ) = Ff (x, y, z, σz )
Z
1
= √ 3 f (x, y, z, σz ) e−j(xpx +ypy +zpz ) dµℓ (x, y, z) .
2π
59
2.4. MEHRTEILCHENSYSTEME
2.4
Mehrteilchensysteme
Wir beschränken uns hier auf solche Mehrteilchensysteme, bei denen sich die einzelnen Teilchen aufgrund fester Teilcheneigenschaften (wie Masse, Ladung oder Spin)
unterscheiden. Für Systeme identischer Teilchen gelten einige Besonderheiten, auf
die wir hier nicht eingehen wollen.
Axiom 5 läßt sich sofort für Systeme mit N (unterscheidbaren!) Teilchen verallgemeinern: man hat (für jeden Zeitpunkt t) 3N Orts-Observablen X1 , Y1 , Z1 , . . . , XN ,
YN , ZN und 3N Impuls-Observablen PX1 , PY 1 , PZ1 , . . . , PXN , PY N , PZN , die durch
die Schrödinger-Darstellung
St : IH −→ L2 R3N , µℓ
|f i 7−→ f (x)
auf die v-Operatoren bzw. auf die Ableitungsoperatoren transformiert werden. Die
Schrödinger-Funktionen haben die Gestalt
f (x) = f( x1 , y1 , z1 , . . . , xN , yN , zN ) = f (r1 , . . . , r N ) ∈ L2 R3N , µℓ .
| {z }
| {z }
r1
rN
Der Zustand eines 2-Teilchensystems wird beispielsweise durch eine SchrödingerFunktion
f (x1 , x2 , x3 , x4 , x5 , x6 ) = f (r 1 , r 2 ) ∈ L2 R6 , µℓ
beschrieben. Die Funktion |f (r 1 , r 2 )|2 ist nach Axiom 4 die Wahrscheinlichkeitsdichte für den kombinierten Ort: es ist die Wahrscheinlichkeitsdichte dafür, daß man
Teilchen 1 am Ort r1 findet, und Teilchen 2 am Ort r 2 (Verbundwahrscheinlichkeiten).
Für das N-Teilchensystem mit Spin ergeben sich ganz analoge Verhältnisse: man
hat Schrödinger-Funktionen der Form
f (x) = f (r 1 , σ1 , r2 , σ2 , . . . , r N , σN ) ∈ L2 R4N , µsℓ ,
wobei das Maß µsℓ derart definiert ist, daß
Z
f (x)g(x) dµsℓ (x) =
s1
X
s2
X
σ1 =−s1 σ2 =−s2
···
Z
sN
X
σN =−sN
f (x)g(x) dµℓ (r 1 , r 2 , . . . , rN ) .
60
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
2.5
2.5.1
Die Zeitentwicklung des Systems
Der Hamilton-Operator
In jedem quantenmechanischen System gibt es eine (i. allg. zeitabhängige) Observable Ht , die für die Zeitentwicklung des Systems bestimmend ist. Man nennt Ht den
Hamilton-Operator und beschreibt ihn meistens durch die Angabe des entsprechenden Operators
Ht = St Ht St−1
in der Schrödinger-Darstellung. Um Ht zu ermitteln gibt es empirisch gefundene
Konstruktionsregeln, die z. B. in Messiah [29], Abschnitt 2.2.7, beschrieben werden.
Wir geben hier das fertige Ergebnis für einige wichtige Fälle an.
Spinloses Teilchen im Potential
Der Laplace-Operator △ in L2 (R3 , µℓ ) ist definiert durch
△ := ∂x2 + ∂y2 + ∂z2
Hierbei ist ∂i2 = −( 1j ∂i )2 ; 1j ∂i ist der auf Seite 51 definierte s.a. Operator. Der
Definitionsbereich D△ von △ ergibt sich gemäß Seite 32 aus den Definitionsbereichen
der 1j ∂i . Es läßt sich zeigen, daß △ s.a. ist7 .
Mit V(x) bezeichnen wir eine (meßbare) R3 → R - Funktion; faßt man V (x) als
Multiplikationsoperator auf, so hat man einen Operator mit Definitionsbereich
Z
o
n
3
DV = f (x) ∈ L2 R , µℓ |V (x) f (x) |2 dµℓ (x) < ∞ ;
Nach Satz 1.28 ist dieser Operator s.a..
Wir betrachten nun den Operator
H̆ := −
1
△ + V (x) ,
2m
(2.8)
der den Definitionsbereich DH̆ = D△ ∩ DV hat (m sei eine positive Konstante).
Dieser Operator ist i. allg. nicht s.a.; für eine sehr große Klasse von Funktionen V (x)
7
Um die Selbstadjungiertheit von △ zu zeigen, betrachten wir △ in der Impulsdarstellung. Dort
hat △ die Form
Z
n
o
e = p2 + p2 + p2 , D e = fe ∈ L2 R3 , µℓ fe p 2 p2 dµℓ p < ∞, i = 1, 2, 3 .
△
1
2
3
i
△
Man prüft leicht nach, daß
Z
n
o
3
e
fe p 2 p2 + p2 + p2 dµℓ p < ∞
D△
=
f
∈
L
R
,
µ
2
ℓ e
1
2
3
e ein Multiplikationsoperator im Sinne von Definition 1.31 ist. Nach
und hat dadurch gezeigt, daß △
e
Satz 1.28 ist △ dann s.a., was nach Satz 1.26 die Selbstadjungiertheit von △ nach sich zieht. QED.
61
2.5. DIE ZEITENTWICKLUNG DES SYSTEMS
ist er aber e.s.a. und hat somit eine eindeutige s.a. Erweiterung H (In den meisten
Fällen ist der Operator H derart, daß er auch auf dem sehr ‘kleinen’ Bereich C0∞ (R3 )
e.s.a. ist).
Axiom 9 Wir betrachten das System des spinlosen Teilchens der Masse m, das
sich im Potential V (x) bewegt (V (x) sei derart, daß (2.8) e.s.a. ist). Der HamiltonOperator H = St Ht St−1 ist dann durch die (eindeutige) s.a. Erweiterung von (2.8)
gegeben. Hat man ein zeitabhängiges Potential Vt (x), so ergibt sich entsprechend ein
zeitabhängiger Operator Ht .
V (x) ist hierbei jenes energetische Potential (= potentielle Energie), das man erhält,
wenn man das System aus der Sichtweise der klassischen Physik betrachtet.
Beispiel 2.2 Betrachtet man ein Elektron, das sich im elektrostatischen Feld bewegt, so liegt genau obiger Fall vor: das elektrostatische Feld E(x) kann mit Hilfe eines elektrischen Potentials φ(x) beschrieben werden: E(x) = −grad φ(x). Bezeichnet man die Ladung des Elektrons
mit −e (e ≈ 1, 6 · 10−19 C), so erhält man das energetische Potential (= potentielle Energie)
V (x) = −eφ(x) .
Der Spin des Elektrons wurde hier außer Acht gelassen, was — wegen der Absenz magnetischer Felder — in sehr guter Näherung zulässig ist.
Hat man kein statisches, sondern ein langsam veränderliches elektrisches Feld, so kann dieses näherungsweise immer noch durch ein elektrisches Potential φt (x) beschrieben werden
(E t (x) = −grad φt (x)) und man hat
Vt (x) = −eφt (x) .
Bei schnell veränderlichem elektromagnetischen Feld wird diese Näherung unbrauchbar, da
die Bewegung des Teilchens dann nicht mehr durch ein Potential Vt (x) bestimmt ist; Axiom 9
kann auf diesen Fall nicht angewandt werden.
Spinloses Teilchen im elektromagnetischen Feld
Wir betrachten den Operator
H̆t = −
1
jq
jq
q2
△ + A · grad +
div A +
A · A + qφ.
2m
m
2m
2m
(2.9)
Hierbei ist: m = Masse des Teilchens, q = Ladung des Teilchens (für das Elektron
ist beispielsweise q ≈ −1.6 · 10−19 ). φ und A sind das skalare Potential und das
Vektorpotential des elektromagnetischen Feldes, d. h.
E t (x) = −
∂
A (x) − grad φt (x) ,
∂t t
B t (x) = rot At (x) .
Für eine größe Klasse von Potentialen ist H̆t e.s.a..
Axiom 10 Im System des geladenen spinlosen Teilchens im elektromagnetischen
Feld ist der Hamilton-Operator Ht = St Ht St−1 durch die s.a. Erweiterung des Operators (2.9) gegeben (Wir setzen voraus, daß die Potentiale derart sind, daß (2.9)
e.s.a. ist).
62
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Teilchen mit Spin im elektromagnetischen Feld
Für das geladene Teilchen mit Spin s = 12 , das sich im elektromagnetischen Feld
bewegt, ist der Hamilton-Operator H = St Ht St−1 (in guter Näherung8 ) durch die
s.a. Erweiterung von
H̆↑↑ H̆↑↓
H̆b 0
=
+
H̆t =
H̆↓↑ H̆↓↓
0 H̆b
1
0
−Bx
0
jBy
−Bz 0
+ g
+
+
−Bx
0
−jBy 0
0
Bz
2
gegeben. H̆b ist hierbei der Operator aus (2.9). Bx , By , Bz sind die Komponenten des
magnetischen Feldes, und g ist der Faktor aus Axiom 7 (Wir setzen wieder voraus,
daß die Felder derart sind, daß obiger Operator e.s.a. ist).
2.5.2
Die quantenmechanische Energie
Der im letzten Abschnitt eingeführte Hamilton-Operator ist per definitionem die
Energie-Observable und legt somit fest, was man in der Quantenmechanik unter Energie versteht. In vielen Situationen besteht eine große Ähnlichkeit zwischen
der quantenmechanischen Energie und dem Energie-Begriff der klassischen Mechanik. Dies gilt i. allg. aber nur für schwere Teilchen, denn nur für diese können Ort
und Geschwindigkeit gleichzeitig geringe Unschärfe besitzen, sodaß der klassische
Energie-Ausdruck
mv 2
E=
+ V (x)
2
sinnvoll definiert ist.
Die quantenmechanische Energie hat aber auch die Eigenschaft eine ‘Schwingfrequenz’ zu sein: wie sich (mit hilfe der Zeitentwicklungsaxiome) zeigen läßt, führt
eine sich stark um den Wert Ê konzentrierende Energieverteilung zu einer Zeitentwicklung der Form
ft (λ) ≈ ft0 (λ) ejω·(t−t0 )
mit
ω ≈ Ê
2.5.3
(ω · ~ ≈ Ê).
Implizite und explizite Zeitabhängigkeit
der Observablen
Sei Xt die Observable für die Messung der x-Komponente des Ortes zum Zeitpunkt t. Xt ist natürlich zeitabhängig, da man für die Ortsmessung zum Zeitpunkt t1 i. allg. ein anderes Ergebnis erwarten wird, wie für die Ortsmessung zum
Zeitpunkt t2 (Denn während des Zeitraumes [t1 , t2 ] hat das Teilchen — sofern
es sich bewegt — seinen Aufenthaltsort verändert). Transformiert man Xt in die
8
Wir vernachlässigen hier die sogenannte Spin-Bahn Kopplung (Siehe z. B. [23], Seite 40).
63
2.5. DIE ZEITENTWICKLUNG DES SYSTEMS
Schrödinger-Darstellung des Zeitpunktes t, so erhält man aber einen zeitunabhängigen Operator:
X = St Xt St−1 = v-Operator x
...
unabhängig von t.
Die Zeitabhängigkeit von Xt wird durch die Zeitabhängigkeit von St aufgehoben.
Dasselbe gilt auch für alle anderen Orts-Observablen, sowie für die Impuls- und SpinObservablen: sie alle verlieren in der Schrödinger-Darstellung ihre Zeitabhängigkeit.
Anders verhält es sich für den Hamilton-Operator Ht : bei veränderlichem elektromagnetischen Feld ist
Ht = St Ht St−1
zeitabhängig. Man sagt dann, die Observable Ht sei explizit zeitabhängig,
während die vorher genannten Observablen nur implizit zeitabhängig sind.
Da der Übergang von der Schrödinger-Darstellung zur Impulsdarstellung unabhängig von t ist (diese Übergang wird durch die — zeitunabhängige! — FourierTransformation vermittelt), verlieren auch in der Impulsdarstellung alle nur implizit zeitabhängigen Observablen ihre Zeitabhängigkeit. Darstellungen, die (wie die
Impulsdarstellung) über eine zeitunabhängige Transformation mit der SchrödingerDarstellung verknüpft sind, nennen wir Schrödinger-Bild-Darstellungen.
2.5.4
Zeitentwicklungs-Operator und
Schrödinger-Gleichung
Axiom 11 Für alle t0 , t ∈ R gibt es einen unitären Operator
Ut0 t : IH −→ IH,
sodaß für alle nur implizit zeitabhängigen Observablen At gilt
At = Ut−1
At0 Ut0 t .
0t
Ferner ist Ut−1
= Utt0 , wodurch sich folgende einprägsame Form ergibt:
0t
At = Utt0 At0 Ut0 t .
Ut0 t heißt Zeitentwicklungs-Operator von t0 nach t und kann über folgende Gleichung bestimmt werden:
d
j Ut0 t = Ut0 t Ht
(2.10)
dt
(Anfangsbedingung: Ut0 t0 = 1).
d
Intuitiv dürfte klar sein, was unter dt
Ut0 t zu verstehen ist. Die mathematisch exakte
Formulierung von Gleichung (2.10) lautet aber
1
H-lim j
(Ut0 ,t+∆t − Ut0 t ) |f i = Ut0 t Ht |f i ,
für alle |f i ∈ DHt (2.11)
∆t→0
∆t
(Siehe Prugovečki [34], Seite 297).
64
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Man sieht, daß der Hamilton-Operator den Zeitentwicklungs-Operator Ut0 t bestimmt, und damit die Dynamik aller nur implizit zeitabhängigen Observablen.
Ist At nur implizit zeitabhängig, so gibt es in der Schrödinger-Darstellung einen
zeitunabhängigen Operator A, sodaß
At = St−1 ASt .
(2.12)
Setzt man A = St0 At0 St−1
in (2.12) ein, so erhält man
0
At = St−1 St0 At0 St−1
St ,
0
woraus sich schließlich folgende nützliche Beziehungen ergeben:
Ut0 t = St−1
St ,
0
Ut−1
= St−1 St0 .
0t
(2.13)
Satz 2.3 Sei ft (x) die Wellenfunktion des Systems (also ft (x) = St |f i). Dann gilt
ft (x) = Ut0 t ft0 (x)
.
(2.14)
Hierbei ist Ut0 t = St Ut0 t St−1 der Zeitentwicklungs-Operator in der SchrödingerDarstellung.
Beweis:
ft0 (x) = St St−1
St St−1 ft0 (x) = Ut0 t ft0 (x) .
ft (x) = St |f i = St St−1
0
0
| {z
}
Ut0 t
QED.
Man sieht leicht, daß ein analoger Satz auch für die Impulsdarstellung gilt, und ganz
allgemein für jede Schrödinger-Bild-Darstellung.
Der Operator Ut0 t = St Ut0 t St−1 kann aber nicht unmittelbar über (2.10) bestimmt
werden, da
d
d
d
−1
Ut t =
St Ut0 t St 6= St
Ut t St−1 .
dt 0
dt
dt 0
Geeignete Umformungen führen aber zu
Satz 2.4 Die Bestimmungsgleichung für Ut0 t = St Ut0 t St−1 lautet:
j
(Ht = St Ht St−1 ).
d
Ut t = Ht Ut0 t
dt 0
(2.15)
65
2.5. DIE ZEITENTWICKLUNG DES SYSTEMS
Beweis: Offenbar gilt
d
d −1
d
d
−1
−1
Ut0 t =
Ut0 t Ut0 t Ut−1
=
S
S
U
S
S
=
S
U
t t0 t t
t
t t St0 .
t0
0t
} 0
dt
dt
dt t0 | {z
dt 0
Ut0 t
Gleichung (2.10) liefert dann
Ut0 t
z }| {
d
= St0 St−1
St St−1 Ht St St−1
j Ut0 t = St0 Ut0 t Ht St−1
St St−1 = Ht Ut0 t .
0
0
dt
| {z } | {z } 0
Ht
Ut0 t
QED.
Ergänzung: Die exakte mathematische Formulierung von (2.15) lautet:
1
(Ut0 ,t+∆t − Ut0 t ) f (x) = Ht Ut0 t f (x) ,
H-lim j
für Ut0 t f (x) ∈ DHt .
∆t→0
∆t
Denn mit den in obigem Beweis angeführten Umformungen erhält man aus (2.11)
1
H-lim j
(Ut0 ,t+∆t − Ut0 t ) St0 |f i = Ht Ut0 t St0 |f i .
∆t→0
| {z }
| {z }
∆t
f (x)
f (x)
Die Bedingung Ut0 t f (x) ∈ DHt ergibt sich aus
Ut0 t f (x) = Ut0 t St0 |f i = St |f i
und |f i ∈ DHt (⇔ St |f i ∈ DHt ).
Einen analogen Satz gibt es natürlich auch für die Impulsdarstellung, sowie für jede
andere Schrödinger-Bild-Darstellung.
Zu beachten ist, daß man in (2.15) den Ausdruck Ht Ut0 t findet, während in (2.10)
der Ausdruck Ut0 t Ht vorkommt (umgekehrte Reihenfolge!).
Oft ist es günstiger an Stelle von (2.14) eine Formulierung zu wählen, bei der die
Zeitentwicklung von ft (x) direkt mit Hilfe von Ht bestimmt werden kann, ohne den
Umweg über Ut0 t zu gehen:
Satz 2.5 ((zeitabhängige) Schrödinger-Gleichung) Sei ft (x) die Wellenfunktion des Systems (also ft (x) = St |f i) und Ht = St Ht St−1 der Hamilton-Operator in
Schrödinger-Darstellung. Dann gilt
j
∂
ft (x) = Ht ft (x)
∂t
(2.16)
(für ft (x) ∈ DHt ).
Beweis:
j
∂
∂
ft (x) = j Ut0 t ft0 (x) = Ht ft (x) .
∂t
∂t
QED.
Eine analoge Gleichung gibt es auch in jeder anderen Schrödinger-Bild-Darstellung.
66
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
2.5.5
Systeme mit konstanter Energie
In der klassischen Mechanik haben Systeme mit konstanter Energie eine große Bedeutung; es sind das genau jene Systeme, die keinen Energieaustausch mit ihrer Umwelt haben und somit eine konstante innere Gesamtenergie besitzen. Das quantenmechanische Analogon hierzu ist das System mit zeitunabhängigen Hamilton-Operator
Ht = H (Denn dieser Operator ist per definitionem die Energie-Observable). Für
solche Systeme gelten einige Besonderheiten, auf die wir hier kurz eingehen wollen.
Ist Ht = H zeitunabhängig, so gibt es eine (zeitunabhängige!) unitäre Transformation
T : IH −→ L2 RI , µ
(2.17)
|f i 7−→ f (λ) ,
die H in den v-Operator λH = πH (λ) überführt. Wegen der Zeitunabhängigkeit von
T ist dtd (T Ut0 t T −1 ) = T ( dtd Ut0 t )T −1 . Aus (2.10) ergibt sich dann
j
d
Ut t = Ut0 t λH ,
dt 0
Ut0 t0 = 1
(2.18)
(mit Ut0 t = T Ut0 t T −1 , λH = T HT −1 ). Man kann leicht nachprüfen, daß der Multiplikationsoperator
Ut0 t = e−jλH ·(t−t0 )
(2.19)
die Lösung von (2.18) ist. Für Ut0 t = T −1 Ut0 t T schreiben wir aufgrund von (2.19)
Ut0 t = e−jH·(t−t0 )
(auf diese Notation werden wir im Abschnitt 3.2 näher eingehen).
Der folgende Satz zeigt, daß ein nicht explizit zeitabhängiger Hamilton-Operator
Ht überhaupt keine Zeitabhängigkeit hat:
Satz 2.6 Sei Ht der Hamilton-Operator und Ht ein unitäräquivalenter Operator in
einer Schrödinger-Bild-Darstellung (z. B. Ht = St Ht St−1 ). Dann gilt: Ht ist genau
dann unabhängig von t, wenn Ht unabhängig von t ist.
Beweis: Sei Ht = H unabhängig von t. Dann gibt es eine unitäre Transformation
(2.17), die H, Ut0 t in λH , e−jλH ·(t−t0 ) überführt. Aus
e−jλH ·(t−t0 ) λH e+jλH ·(t−t0 ) = λH
folgt
Ut0 t HUt−1
= H.
0t
Ist St die Schrödinger-Darstellung (oder irgend eine andere Schrödinger-Bild-Darstellung), so gilt nach (2.13) St = St0 Ut0 t und man erhält:
−1
Ht = St HSt−1 = St0 Ut0 t HUt−1
= Ht0 .
t St
| {z 0 } 0
H
Ht ist somit ebenfalls unabhängig von t.
67
2.5. DIE ZEITENTWICKLUNG DES SYSTEMS
Um zu zeigen, daß aus der Zeitunabhängigkeit von Ht die Zeitunabhängigkeit von
Ht folgt, geht man ganz ähnlich vor: man definiert analog zu (2.17) eine unitäre
Transformation T , die H in einen v-Operator λH überführt. Man erhält dann an
Stelle von (2.18) die aus (2.15) folgende Beziehung
j
d
Ut t = λH Ut0 t ,
dt 0
Ut0 t0 = 1
(Ut0 t = T Ut0 t T −1 ), die aber dieselbe Lösung wie (2.18) liefert. Der Operator H
kommutiert dann mit Uet0 t = St Ut0 t St−1 und man hat
−1
−1
Ht = St−1 HSt = St−1 Uet0 t HUet−1
t St = Ut0 t St HSt Ut0 t = Ht0 .
| {z }
| {z 0 }
Ht
H
QED.
Neben der Energie kann es aber auch noch andere Größen geben, die zeitunabhängig
sind. Man nennt diese Größen Erhaltungsgrößen und es gilt:
Satz 2.7 Sei H der (zeitunabhängige) Hamilton-Operator und At eine nur implizit
zeitabhängige Observable. At ist genau dann eine Erhaltungsgröße (d. h. At = At0
für alle t), wenn At mit H kommutiert.
Beweis: At ist genau dann eine Erhaltungsgröße, wenn
At = Ut−1
At0 Ut0 t .
0t
Da diese Gleichung äquivalent ist zu
Ut0 t At = At0 Ut0 t ,
ist At genau dann eine Erhaltungsgröße, wenn At0 mit Ut0 t kommutiert. Nach Satz
3.6 ist dies aber genau dann der Fall, wenn At0 mit H kommutiert (Denn es ist
Ut0 t = e−jH·(t−t0 ) ). QED.
2.5.6
Stationäre Zustände
Im diesem Abschnitt setzen wir voraus, daß Ht = H unabhängig von t ist.
Definition 2.3 Ein Zustand |f i ∈ IH heißt stationär, wenn für alle t ∈ R gilt:
Ut0 t |f i = αt0 t |f i ,
αt0 t ∈ C mit |αt0 t | = 1.
Für eine beliebige Schrödinger-Bild-Darstellung Tt gilt: |f i ist genau dann stationär,
wenn für ft (λ) = Tt |f i gilt:
ft (λ) = αt0 t ft0 (λ) a.e.,
|αt0 t | = 1.
Hieraus folgt
|ft (λ)| = |ft0 (λ)| a.e..
Bei stationären Zuständen sind somit die Wahrscheinlichkeitsverteilungen aller nur
implizit zeitabhängigen Observablen unabhängig von t.
68
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Satz 2.8 (Zeitunabhängige Schrödinger-Gleichung) Sei H der (zeitunabhängige) Hamilton-Operator und |f i ein beliebiger Zustand. Dieser Zustand ist genau
dann stationär, wenn |f i ein eigentlicher Eigenvektor von H ist, wenn es also ein
E ∈ R gibt, sodaß
H |f i = E |f i ,
|f i ∈ DH .
Es ist dann Ut0 t |f i = αt0 t mit αt0 t = e−jE·(t−t0 ) .
Beweis: Wir schreiben Ut für Ut0 t und nehmen ohne Beschränkung der Allgemeinheit an, daß t0 = 0 ist. Sei T die unitäre Transformation (2.17), die H, Ut in die
Multiplikationsoperatoren λH , e−jλH t überführt. Wir haben nun die Äquivalenz der
beiden folgenden Aussagen zu zeigen:
∀t ∈ R : e−jλH t f (λ) = αt f (λ) a.e. ,
|αt | = 1
(2.20)
∃E ∈ R : (λH f (λ) = Ef (λ) a.e.)
(2.21)
(In (2.21) ist die Bedingung |f i ∈ DH bereits enthalten: da Ef (λ) immer quadratintegrabel ist, impliziert (2.21) die Quadratintegrabilität von λH f (λ); diese wiederum
ist äquivalent zu |f i ∈ DH ).
Aus (2.21) folgt: fast überall in RI ist λH = E oder f (λ) = 0. Mit αt := e−jEt folgt
dann (2.20).
Nun nehmen wir an, (2.20) sei erfüllt. Wir definieren (für t 6= 0)
o
n
Gt := λH ∈ Re−jλH t = αt
o n
o
n
−1
Ωt := RI \ πH
(Gt ) = λ ∈ RI πH (λ) ∈
/ Gt = λ ∈ RI e−jλH t 6= αt .
Mit φt :=
j ln αt
t
gilt
Wegen (2.20) ist
Mit G := G1 ∩ G√2
n
o
2kπ Gt = φt +
k ∈ Z .
t
∀t ∈ R : (f (λ) = 0 a.e. in Ωt ) .
und Ω := Ω1 ∪ Ω√2 = λ ∈ RI πH (λ) ∈
/ G ist dann
f (λ) = 0 a.e. in Ω.
√
Da die Zahlen 1 und 2 in keinem rationalen Verhältnis stehen, kann man leicht
zeigen, daß G höchstens ein Element beinhaltet; dieses wollen wir mit E bezeichnen
(G kann nicht ganz leer sein, da wir vorausgesetzt haben, daß |f i =
6 O ist). Auf Ω ist
f (λ) = 0 a.e.; auf RI \ Ω ist λH − E = 0. Somit gilt auf ganz RI
(λH − E)f (λ) = 0 a.e.,
was aber äquivalent zu (2.21) ist. QED.
2.5.7
Heisenberg-Bild und Schrödinger-Bild
Sei IH der abstrakte Hilbertraum des quantenmechanischen Systems und
Tt : IH −→ E
(2.22)
2.5. DIE ZEITENTWICKLUNG DES SYSTEMS
69
eine unitäre Transformation. Ist Tt = T zeitunabhängig, so nennen wir T eine
Heisenberg-Bild-Darstellung. Ein Beispiel einer solchen Darstellung ist
St0 : IH −→ L2 (Rn , µℓ )
|f i 7−→ ft0 (x)
(für festes t0 ). In dieser Darstellung wird der Systemzustand durch die (zeitunabhängige!) Schrödinger-Funktion des Zeitpunktes t0 dargestellt.
Der zeitabhängige Operator St (t variabel) führt dagegen zu einer zeitabhängigen
Darstellung
St : IH −→ L2 (Rn , µℓ )
|f i 7−→ ft (x) .
Diese unitäre Transformation ist der wichtigste Fall eine Schrödinger-Bild-Darstellung. Wie bereits auf Seite 63 erwähnt, nennen wir die Abbildung (2.22) genau dann
eine Schrödinger-Bild-Darstellung, wenn Tt über einen zeitunabhängigen unitären
Operator mit St verknüpft ist:
Tt = F St ,
F unitär.
Der wesentliche Unterschied zwischen Heisenberg- und Schrödinger-Bild-Darstellungen läßt sich wie folgt zusammenfassen:
Satz 2.9 Ist Tt : IH → E eine Schrödinger-Bild-Darstellung, so verlieren in E
alle wichtigen Observablen — eventuell mit Ausnahme des Hamilton-Operators —
ihre Zeitabhängigkeit9; andererseits werden aber die Zustände durch zeitabhängige
Vektoren aus E beschrieben. Ist Tt dagegen eine Heisenberg-Bild-Darstellung,
so werden die Zustände durch zeitunabhängige Vektoren aus E beschrieben; den Observablen entsprechen zeitabhängigen Operatoren in E (Wenn es sich nicht um Erhaltungsgrößen handelt).
Neben diesen beiden ‘Extremfällen’ gibt es auch ‘gemischte’ Darstellungen bei
denen die Zeitabhängigkeit von Tt derart ist, daß sowohl die Zustandsvektoren in E
zeitabhängig sind, als auch die Observablen in E. Die wichtigste dieser Darstellungen
ist die Dirac-Bild-Darstellung (oder auch Wechselwirkungsbild-Darstellung genannt),
auf die wir hier aber nicht näher eingehen wollen.
Eine sehr spezielle Heisenberg-Bild-Darstellung ist der Einheitsoperator in IH:
1 : IH −→ IH
|f i 7−→ |f i .
Dieser triviale Fall unterstreicht, daß im abstrakten Hilbertraum IH (so wie wir
ihn definiert haben) die Verhältnisse des Heisenberg-Bildes vorliegen: die Zustände
werden durch zeitunabhängige Vektoren aus IH dargestellt, die Observablen durch
9
Genauer: alle nur implizit zeitabhängigen Observablen verlieren ihre Zeitabhängigkeit.
70
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
zeitabhängige Operatoren. Man kann in IH aber auch eine abstrakte Form einer
Schrödinger-Bild-Darstellung definieren: die Abbildung
Ut0 t : IH −→ IH
|f i 7−→ |ft i := Ut0 t |f i
ist offenbar eine Schrödinger-Bild-Darstellung (Denn es ist Ut0 t = St−1
St ). Den
0
Zuständen entsprechen dann zeitabhängige Vektoren |ft i; den Meßgrößen entsprechen Operatoren
AS = Ut0 t At Ut−1
(= At0 ) ,
0t
die normalerweise zeitunabhängig sind (Der Index ‘S’ steht hier für ‘SchrödingerBild’). Nur dann, wenn At explizit zeitabhängig ist, ergibt sich auch für AS eine
Zeitabhängigkeit. Wir schreiben dann:
ASt = Ut0 t At Ut−1
.
0t
Bei Überlegungen, die alle Schrödinger-Bild-Darstellungen betreffen, ist es naheliegend, die soeben eingeführte abstrakte Schrödinger-Bild-Darstellung zu verwenden.
2.6. ERWARTUNGSWERTE UND UNSCHÄRFE
2.6
71
Erwartungswerte und Unschärfe
2.6.1
Die Berechnung von hAi und ∆A
Sei |f i ∈ IH der Zustand des quantenmechanischen Systems und A eine beliebige
Observable. Mißt man die Observable A, so erhält man einen Meßwert a ∈ R.
Dieser Meßwert kann zwar nicht exakt vorhergesagt werden, doch es ist möglich
einen Erwartungswert hAi anzugeben (oft nennt man hAi auch Mittelwert). Da
der Erwartungswert von |f i abhängt, schreibt man oft auch hAif .
Satz 2.10 Für |f i ∈ DA und kf k = 1 gilt
hAif = hf | Af i
(Für kf k =
6 1 ergibt sich entsprechend hAif =
hf | Af i
).
hf | f i
Beweis: Sei
−→ L2 RI , µ
T : IH
|f i 7−→ f (λ)
eine diagonalisierende Darstellung für {A}, die A in den v-Operator λA = πA (λ)
überführt. Aus Axiom 4 ergibt sich für A folgende Wahrscheinlichkeitsverteilung:
Z
m 2
Pf (∆) =
|f (λ)| dµ(λ)
∆⊆R
−1
λ∈πA
(∆)
(Pf (∆) ist ein Maß auf R). In der Wahrscheinlichkeitstheorie ist der Erwartungswert
definiert durch
Z
hAif =
λA dPf (α) ,
λA ∈R
woraus sich schließlich
hAif =
Z
2
λA |f (λ)| dµ(λ)
herleiten läßt, was offensichtlich äquivalent zu hAif = hf | Af i ist. QED
Der Erwartungswert hAi gibt an, welcher Wert bei der Messung von A im Mittel zu
erwarten ist. Die im Mittel zu erwartende Abweichung des tatsächlichen Meßwertes
vom Erwartungswert hAi wird durch folgende Größe charakterisiert:
q
q
2
∆A :=
(A − hAi) = hA2 i − hAi2
(2.23)
(Auch an Stelle von ∆A kann man (∆A)f schreiben, um die Abhängigkeit vom
Zustandsvektor |f i zu betonen). Man nennt ∆A die Standardabweichung und
(∆A)2 die Varianz10 .
10
Nach Gleichung (2.23) ist ∆A zunächst nur für |f i ∈ DA2 ⊆ DA definiert. Man kann ∆A aber
auf ganz DA definiere, wenn man an Stelle von (2.23) die etwas allgemeinere Beziehung
∆A := k(A − hAi) f k
verwendet, die für |f i ∈ DA2 mit (2.23) übereinstimmt.
72
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Der wahrscheinlichkeitstheoretische Begriff der Standardabweichung ist in der
vorliegenden Anwendung ein Maß für die Unschärfe der Observable A (für gegebenes |f i): ist ∆A klein, so weiß man, daß eine Messung von A einen Wert liefern
würde, der sehr nahe an hAi liegt. Das System ist somit in einem Zustand in dem
der Meßwert für die Observable A auch ohne Messung recht scharf bestimmt ist.
Ein großes ∆A bewirkt eine große Unschärfe, denn man weiß vor der Messung nicht,
welches Meßergebnis man erhalten wird.
Die Unschärfe ist ein typisch quantenmechanisches Phänomen das es in der klassischen Physik nicht gibt. Denn dadurch, daß wir den Systemzustand vollständig
kennen, müßten wir, nach den Vorstellungen der klassischen Physik, in der Lage
sein, jedes Meßergebnis exakt vorherzusagen.
Auch in der Quantenmechanik gibt es den Fall ∆A = 0; hier stellt er aber eine
Ausnahme dar:
Satz 2.11 Sei |f i ∈ IH ein Zustandsvektor und A eine Observable. Die Unschärfe
(∆A)f ist genau dann 0, wenn |f i ein Eigenvektor von A ist, d. h. wenn es einen
Eigenwert α ∈ R gibt, sodaß
A |f i = α |f i
(|f i ∈ DA ) .
Es ist dann α = hAif .
Beweis: Sei A |f i = α |f i (und ohne Beschränkung der Allgemeinheit kf k = 1). Es
ist dann
2
2
2
2
2
2
(∆A) = A2 − hAi = hAf | Af i − (hf | Af i) = α2 kf k − α kf k
= 0.
2
Ferner ist hAi = hf | Af i = α kf k = α.
Sei nun ∆A = 0. Sei ferner |f i 7→ f (λ) ∈ L2 RI , µ eine diagonalisierende Darstellung
für {A}, die A in den v-Operator λA überführt. Es ist dann
D
E Z
2
2
2
2
(∆A) = (A − hAi) = (λA − hAi) |f (λ)| dµ(λ) = 0.
Auf Ω := λ ∈ RI λA 6= hAi muß somit f (λ) = 0 a.e. sein. Man kann dann für
λA 6= hAi
λA f (λ) = hAi f (λ)
(2.24)
schreiben. Da für λA = hAi die Gleichung (2.24) ebenfalls gültig ist, gilt sie auf RI
a.e., was aber gleichbedeutend mit A |f i = hAi |f i ist. QED.
Dieser Satz hat eine wichtige Konsequenz: Eine Observable A, die keine (eigentlichen) Eigenwerte hat, kann niemals ‘scharf bestimmt’ sein, d. h. es gibt keinen
Zustand, in dem ∆A = 0 ist. Ein Beispiel für solche Observablen sind die OrtsObservablen X, Y, Z: die Größen ∆X, ∆Y, ∆Z können zwar beliebig klein werden,
nicht aber gleich 0. Das Quantenmechanische Teilchen ist somit nie so exakt lokalisiert, wie man dies vom Modell des klassischen Teilchens her gewöhnt ist.
Ein Wichtiger Spezialfall ist jener des Hamilton-Operators (=Energie-Observable): Die Eigenvektoren des Hamilton-Operators entsprechen nach Satz 2.11 den
Zuständen mit scharf bestimmter Energie. Nach Satz 2.5 sind aber die Eigenvektoren
des Hamilton-Operators genau die stationären Zustände des Systems. Somit gilt: Die
stationären Zustände sind genau die Zustände mit scharf bestimmter Energie.
73
2.6. ERWARTUNGSWERTE UND UNSCHÄRFE
2.6.2
Unschärferelationen
Definition 2.4 Seien A und B zwei lineare Operatoren im Hilbertraum IH (DA und
DB seien die entsprechenden Definitionsbereiche). Der Kommutator von A, B ist
definiert durch
[A, B] := AB − BA.
Der Kommutator zweier kommutierenden Observablen ist stets 0. Interessant wird
es aber bei nicht kommutierenden Observablen, denn es gilt
Satz 2.12 Für zwei beliebige Observablen A, B gilt:
1 ∆A · ∆B ≥ h[A, B]i.
2
(2.25)
b := A − hAi , B
b := B − hBi und sei kf k = 1 (Für allgemeineres |f i
Beweis: Sei A
kann man aber ganz analog vorgehen). Offenbar gilt dann
b k · kBf
b k ≥ hAf
b | Bf
b i ≥ ImhAf
b | Bf
b i =
∆A · ∆B = kAf
1 b b
b | Af
b i = 1 hAf | Bf i − hBf | Af i = 1 f (AB − BA)f .
= hAf
| Bf i − hBf
2
2
2
QED.
Ergänzung zu Satz 2.12: Der Ausdruck [A, B] ist zunächst nur für
|f i ∈ D[A,B] = DAB ∩ DBA ⊆ DA ∩ DB
definiert, während das Produkt ∆A · ∆B auf ganz DA ∩ DB sinnvoll ist. Aus obigem
Beweis sieht man aber, daß
1 hAf | Bf i − hBf | Af i.
2
hAf | Bf i − hBf | Af i stimmt auf D[A,B] mit [A, B] überein, ist aber auf ganz
DA ∩ DB definiert.
∆A · ∆B ≥
Ist [A, B] ein beschränkter und dicht definierter Operator, so kann [A, B] eindeutig
auf ganz IH erweitert werden. Bezeichnet man diese Erweiterung mit R, so läßt sich
zeigen, daß für alle |f i ∈ DA ∩ DB
hAf | Bf i − hBf | Af i = hf | Rf i
und folglich
∆A · ∆B ≥
1 hRi .
2
Ein wichtiger Sonderfall ist jener der Orts- und Impulsoperatoren: aus der Beziehung
x
1 ∂
1 ∂
1 ∂
1
1 ∂
1
f (x) −
xf (x) = x
f (x) − f (x) − x
f (x) = − f (x) = jf (x)
j ∂x
j ∂x
j ∂x
j
j ∂x
j
folgt offenbar
74
KAPITEL 2. DIE PHYSIKALISCHEN STRUKTUREN
Satz 2.13 Sei X eine Orts-Observable und Px die entsprechende Impuls-Observable.
Dann gilt
[X, Px ] = j
und folglich
∆X · ∆Px ≥
1
2
(für alle |f i ∈ DX ∩ DPx ).
Mit Hilfe der Spin-Matrizen Σx , Σy , Σz aus Axiom 8 läßt sich unmittelbar folgender Satz herleiten:
Satz 2.14 Seien Σx , Σy , Σz die Observablen für die Spin-Komponenten des Einteilchensystems mit Spin 21 . Dann gilt
[Σx , Σy ] = jΣz
...
[Σy , Σz ] = jΣx
...
[Σz , Σx ] = jΣy
...
1
|hΣz i|
2
1
∆Σy · ∆Σz ≥ |hΣx i|
2
1
∆Σz · ∆Σx ≥ |hΣy i|
2
∆Σx · ∆Σy ≥
Ist nun beispielsweise ∆Σz = 0, so muß nach obigem Satz
hΣx i = hΣy i = 0
sein. Da aber Σx und Σy nur die Meßwerte ± 21 annehmen können, ist bei verschwindenden Erwartungswerten stets
1
∆Σx = ∆Σy = .
2
Es kann somit in jedem Zustand höchstens eine der drei Spin-Komponenten scharf
bestimmt sein.
Kapitel 3
Zusätzliche mathematische
Konzepte
3.1
Das Spektrum der Observablen
Definition 3.1 Sei µ ein Maß auf RI . Wir nennen λ ∈ RI einen Konstanzpunkt
des Maßes µ, wenn eine offene meßbare Umgebung1 U von λ existiert, sodaß
µ(U) = 0.
Ist λ kein Konstanzpunkt, so nennen wir λ einen Wachstumspunkt. Ein Sprungpunkt ist ein spezieller Wachstumspunkt λ, für den
µ({λ}) > 0
ist2 . Die Menge aller Wachstumspunkte heißt Träger des Maßes und wird mit
supp µ abgekürzt (Englisch: ‘support of the measure’).
Den Begriff der offenen Menge in RI haben wir auf Seite 24 definiert; wir setzten
dabei aber voraus, daß die Indexmenge I endlich ist. Der Vollständigkeit halber geben
wir nun an, wie der Begriff der offenen Menge für unendliches (auch überabzählbares)
I verallgemeinert werden kann: eine Menge Ω ⊆ RI ist genau dann offen, wenn sie
als Vereinigung elementarer offener Mengen darstellbar ist:
[
Ω=
Ωα .
α∈A
Die elementaren offenen Mengen Ωα sind hierbei Mengen der Form
Y
Ωα =
∆i = λ ∈ RI ∀λi ∈ ∆i ,
i∈I
wobei alle ∆i offene Teilmengen von R sind (im Sinne von Seite 24) und nur endlich
viele ∆i von R verschieden sind. Abgeschlossen ist eine Menge K genau dann, wenn
RI \ K offen ist. Die so definierten Begriffe der offenen und abgeschlossenen Mengen
entsprechen genau jenen der sogenannten Tihonov-Topologie (Siehe z. B. Maurin [26],
Seite 323).
1
Eine offene Umgebung eines Punktes λ ∈ RI ist eine offene Teilmenge von RI , die λ enthält.
Bei überabzählbarem I ist die einpunktige Menge {λ} nicht meßbar. Unter einen Sprungpunkt
verstehen wir dann einen Punkt λ, zu dem es ein δ > 0 gibt, sodaß für alle meßbaren Mengen M ,
die λ enthalten, µ(M ) > δ ist.
2
75
76
KAPITEL 3. ZUSÄTZLICHE MATHEMATISCHE KONZEPTE
Satz 3.1 Der Träger eines Maßes µ auf RI ist stets eine abgeschlossene Menge.
Beweis: Zunächst setzen wir voraus, daß I endlich ist. Sei {λk }k∈K eine Folge von
Wachstumspunkten mit λk → λ. Wenn λ ein Konstanzpunkt ist, so gibt es eine offene
meßbare Umgebung U von λ, sodaß µ(U ) = 0 ist. Wegen λk → λ gibt es ein λk , das
in U liegt. U ist dann eine offene meßbare Umgebung von λk . Folglich ist λk ein
Konstanzpunkt, was aber ein Widerspruch zur Voraussetzung ist. Der Limes einer
Folge von Wachstumspunkten ist somit stets wieder ein Wachstumspunkt; supp µ ist
dann abgeschlossen.
Wenn I unendlich ist, kann man ganz analog argumentieren, wenn man an Stelle des
Folgen-Begriffes den Netz-Begriff verwendet (Für den Netz-Begriff siehe Abschnitt
4.3.2).
QED.
Wegen der Abgeschlossenheit von supp µ ist
Ω := RI \ supp µ
eine offene Menge. Bei endlichem I gilt folgende einleuchtende Beziehung3
m
S ⊆ Ω =⇒ µ(S) = 0.
(3.1)
Doch auch bei unendlichem I wird man aus physikalischen Überlegungen
oft davon
I
ausgehen, daß (3.1) erfüllt ist. Die Funktionen f (λ) ∈ L2 R , µ sind dann offenbar
nur für λ ∈ supp µ interessant; auf Ω kann f (λ) völlig unbestimmt sein.
Die große physikalische Bedeutung von supp µ wird durch folgenden Satz hervorgehoben, der sich unmittelbar aus Definition 3.1 ergibt:
Satz 3.2 Sei
T : IH −→ L2 RI , µ
eine Spektraldarstellung für den Observablen-Satz {Ai }i∈I . Die Elemente aus supp µ
sind dann genau die möglichen Meßergebnisse, für eine gemeinsame Messung der
Observablen Ai (Genauer: λ ∈ RI liegt genau dann in supp µ, wenn es zu jeder
offenen meßbaren Umgebung U ⊆ RI von λ einen Zustand |f i ∈ IH gibt, sodaß bei
eine kombinierten Messung der Ai eine Wahrscheinlichkeit größer als 0 besteht, ein
Meßergebnis aus U zu erhalten).
Die Frage nach den möglichen Meßergebnissen ist aber nicht nur für einen
vollständigen Observablen-Satz sinnvoll, sondern auch für eine einzelne Observable.
Dies führt uns unmittelbar zum Begriff des Spektrums:
3
Einen Beweis fur (3.1) findet man z. B. in Federer [14], 2.2.16. (Die dort gemachte Voraussetzung bezüglich der Finitheit des Maßes kann erfüllt werden, wenn man das σ-finite Maß µ nach
der Methode von Seite 18 in ein äquivalentes finites Maß µ′ überführt).
77
3.1. DAS SPEKTRUM DER OBSERVABLEN
Definition 3.2 Sei A ein s.a. Operator in E und
T : E −→ L2 RI , µ
f 7−→ f (λ)
eine unitäre Transformation, die A in den v-Operator λA = πA (λ) überführt. Das
Spektrum von A ist dann definiert durch
spec A := πA (supp µ).
(Hierbei ist πA (supp µ) die Abschließung von πA (supp µ)).
Die Abbildung 3.1 veranschaulicht obige Definition für einen Fall, in dem {A1 , A2 }
einen vollständigen Satz kommutierender s.a. Operatoren bilden.
O
supp P
T A T = v-Operator O 1
T A T = v-Operator O spec A O
spec A
Abbildung 3.1
Wie wir aus Satz 3.4 sehen werden, ist spec A nur von A abhängig und nicht von
der speziellen Wahl der diagonalisierenden Darstellung T .
Der folgende Satz zeigt, welche physikalische Bedeutung dem Spektrum einer
Observablen zukommt:
Satz 3.3 spec A ist genau die Menge der möglichen Meßwerte der Observable A
(Genauer: ein α ∈ R liegt genau dann in spec A wenn für jede offene meßbare
Umgebung U ⊆ R von α ein Zustand |f i ∈ IH existiert, sodaß bei einer Messung von
A eine Wahrscheinlichkeit größer als 0 besteht, ein Meßergebnis aus U zu erhalten).
Beweis: Aus Definition 3.2 sieht man sofort, daß jedes α ∈
/ spec A kein möglicher
Meßwert ist.
Ist dagegen α ∈ spec A, so erfüllt jede offene Umgebung U von α die Bedingung
U ∩ πA (supp µ) 6= ∅
78
KAPITEL 3. ZUSÄTZLICHE MATHEMATISCHE KONZEPTE
(Wir verwenden die Bezeichnungen aus Definition 3.2). Es gibt somit ein λ̂ ∈ supp µ
−1
mit πA(λ̂) ∈ U . πA
(U ) enthält λ̂ und ist — wie sich zeigen läßt — offen (Siehe
z. B. Maurin [26], Seiten 323/324).
Da λ̂ ein Wachstumspunkt ist (λ̂ ∈ supp µ), muß
es einen Zustand f (λ) ∈ L2 RI , µ geben mit
Z
2
|f (λ)| dµ(λ) > 0.
−1
λ∈πA
(U)
Dies ist aber gerade die Wahrscheinlichkeit dafür, im Zustand f (λ) ein Meßergebnis
zu erhalten, das in U liegt. QED.
Ist {Ai }i∈I ein vollständiger Satz kommutierender s.a. Operatoren, so folgt aus Definition 3.2 unmittelbar
o
n
Y
supp µ ⊆
spec Ai = λ ∈ RI ∀i ∈ I : πi (λ) ∈ spec Ai ,
i∈I
d. h. bei λ ∈ supp µ ist λi ∈ spec Ai für alle i ∈ I. Im allgemeinen ist aber
Y
supp µ 6=
spec Ai ,
i∈I
Q
d. h. supp µ ist i. allg. echt kleiner als i∈I spec Ai . Das liegt daran, daß nicht
alle ‘Kombinationen’ erlaubt sind: ist λ̂1 ∈ spec A1 und λ̂2 ∈ spec A2 , so sind λ̂1
und λ̂2 mögliche Meßwerte für A1 und A2 ; das heißt aber noch nicht, daß eine
kombinierte Messung von A1 und A2 das Wertepaar (λ̂1 , λ̂2 ) liefern kann. So hat man
beispielsweise beim Wasserstoffatom für die Observablen H und L2 die möglichen
Meßwerte En und l(l + 1) mit n, l = 0, 1, 2, 3, . . .. Obwohl n und l alle natürlichen
Zahlen durchlaufen, sind sie nur in der Kombination
n≥l
erlaubt (Analoge Beispiele lassen sich auch in endlichdimensionalen Hilberträumen
konstruieren).
Die beiden folgenden Sätze zeigen, wie das Spektrum einer Observablen bestimmt
werden kann, ohne vorher das Maß µ einer diagonalisierenden Darstellung zu ermitteln.
Satz 3.4 Das Spektrum eines s.a. Operators A ist die Menge aller α ∈ R für die
der Operator (A − α)−1 nicht existiert oder zumindest nicht beschränkt ist.
Beweis: Sei
α∈
/ spec A = πA (supp µ)
(Wir verwenden die Bezeichnungen aus Definition 3.2). Es gibt dann eine offene
Umgebung U von α mit U ⊆ R\πA (supp µ). Folglich gibt es ein r > 0 mit |λA −α| > r
für alle λA ∈ πA (supp µ). Für alle λ ∈ supp µ gilt dann
1
−1 (πA (λ) − α) < .
r
79
3.1. DAS SPEKTRUM DER OBSERVABLEN
Der Multiplikationsoperator (πA (λ) − α)−1 hat somit eine Norm, die kleiner als
ist, woraus
1
−1 (A − α) < < ∞
r
folgt.
1
r
Sei nun α ∈ spec A. Dann gibt es für jedes r > 0 ein λ̂ ∈ supp µ, sodaß πA(λ̂) ∈
−1
]α − r, α + r[. die Menge U := πA
(]α − r, α + r[) ⊆ RI ist eine offene meßbare Umgebung von λ̂ und wegen λ̂ ∈ supp µ ist µ(U ) > 0. Da wir von µ voraussetzen, σ-finit
zu sein, gibt es eine meßbare Teilmenge B von U mit 0 < µ(B) < ∞. Die Funktion
1 für λ ∈ B
χB (λ) :=
0 für λ ∈
/B
ist dann ein von O verschiedenes Element aus L2 RI , µ und es gilt
r kχB (λ)k > k(πA (λ) − α) χB (λ)k .
(3.2)
Existiert (A − α)−1 , so folgt aus (3.2)
k(A − α)−1 gk >
1
kgk
r
(mit g := (A − α)χB ). Da r beliebig klein ist, kann (A − α)−1 (falls es überhaupt
existiert) nicht beschränkt sein. QED.
Bemerkung 1: Wir haben in Satz 3.4 gefordert, daß α reell ist. Man könnte aber
genausogut sagen, spec A sei die Menge aller α ∈ C ist, für die (A−α)−1 nicht existiert
oder nicht beschränkt ist. Denn es läßt sich zeigen, daß bei selbstadjungiertem A und
α ∈ C \ R der Operator (A − α)−1 stets existiert und beschränkt ist.
Bemerkung 2: Die in Satz 3.4 gegebene Charakterisierung von spec A dient meistens sogar als Definition von spec A. Auf diese Weise kann das Spektrum auch für
nicht selbstadjungierte Operatoren definiert werden; man muß dann aber α ∈ C zulassen, da bei nicht selbstadjungierten Operatoren das Spektrum i. allg. nicht reell ist
(Unitäre Operatoren haben beispielsweise ein Spektrum, das auf dem Einheitskreis
in C liegt).
Satz 3.5 (Weyl-Kriterium) Sei A ein s.a. Operator mit Definitionsbereich DA .
Ein α ∈ R liegt genau dann in spec A, wenn es eine Folge (fk )k=1,2,3,... in DA gibt,
mit kfk k = 1 und
H
(A − α) fk −→ O.
(3.3)
(Einen Beweis dieses Satzes findet man z. B. in Großmann [18], Seite 249).
Man sieht sofort, daß alle eigentlichen Eigenwerte in spec A liegen: denn bei
Af = αf
(3.4)
hat man mit f1 = f2 = f3 = . . . = f sofort eine Folge gefunden, die (3.3) erfüllt.
Schreibt man die Eigenwertgleichung (3.4) in der Form
(A − α) f = O,
80
KAPITEL 3. ZUSÄTZLICHE MATHEMATISCHE KONZEPTE
so sieht man, daß (3.3) als eine Verallgemeinerung der Eigenwertgleichung aufgefaßt
werden kann; Elemente von spec A können somit als verallgemeinerte Eigenwerte
interpretiert werden (Diese Interpretation wird sich im Kapitel 4 noch besser begründen lassen).
Man bezeichnet jene Teilmenge von spec A, die von den eigentlichen Eigenwerten gebildet wird als diskretes Spektrum4 . Die Menge aller Punkte aus spec A,
die keine eigentlichen Eigenwerte sind, bilden das kontinuierliche Spektrum. Besteht spec A ausschließlich aus eigentlichen Eigenvektoren, so spricht man von rein
diskretem Spektrum.
3.2
Funktionen von Observablen
Sei {Ai }i∈J ein Satz kommutierender s.a. Operatoren im Hilbertraum E und
T : E −→ L2 RI , µ
f 7−→ f (λ)
eine diagonalisierende Darstellung durch die die Operatoren Ai in die v-Operatoren
λi übergeführt werden (für i ∈ J ⊆ I). Im Folgenden verwenden wir die Bezeichnungen
α := (λi )i∈J
A := (Ai )i∈J ,
(Wenn der Satz {Ai }i∈J vollständig ist, kann man J = I wählen und hat dann
α = λ). Ist G(α) eine beliebige
(meßbare) RJ → C - Funktion, die man als Multi
plikationsoperator in L2 RI , µ auffaßt, so kann man durch
G(A) := T −1 G(α) T
(3.5)
einen neuen linearen Operator in E definieren. Sein Definitionsbereich ist offenbar
Z
n
o
2
DG(A) := f ∈ E |G(α) f (λ)| dµ(λ) < ∞
Ist G(α) beschränkt, so ist G(A) überall definiert (d. h. DG(A) = E); ist G(α)
reellwertig, so ist G(A) s.a. und kommutiert mit allen Ai (Siehe Sätze 1.28 und
1.32).
Zu einem gegebenen Operator-Satz {Ai }i∈J gibt es verschiedene diagonalisierende
Darstellungen T . Der oben definierte Operator G(A) ist aber unabhängig von T und
ist somit durch die Operatoren Ai eindeutig bestimmt.
Beweis: Sei
Pf (∆) :=
Z
2
|f (λ)| dµ(λ) ,
m
∆ ⊆ RJ .
α∈∆
4
Das diskrete Spektrum umfaßt höchstens abzählbar viele Punkte (Daher der Name ‘diskret’).
Denn bei selbstadjungiertem A sind die Eigenvektoren zu verschiedenen Eigenwerten orthogonal,
und im separablen Hilbertraum hat jedes Orthogonalsystem höchstens abzählbar viele Elemente.
Manche Autoren verstehen unter ‘diskretem Spektrum’ die Menge aller (eigentlichen) Eigenwerte
mit endlichem Entartungsgrad.
81
3.2. FUNKTIONEN VON OBSERVABLEN
Nach Satz 1.33 ist Pf (∆) unabhängig von T . Pf (∆) ist ein Maß auf RJ und es gilt:
Z
n
o
DG(A) = f ∈ E |G(α)|2 dPf (α) < ∞
. . . unabhängig von T
f G(A) f =
Z
2
G(α) |f (λ)| dµ(λ) =
Z
G(α) dPf (α)
...
unabhängig von T .
Aus Satz 1.12 folgt dann die Behauptung. QED.
Beispiel 3.1 Sei A : DA → E ein s.a. Operator in E. Der Operator ejA ist wie folgt
definiert: sei
T : E −→ L2 RI , µ
f 7−→ f (λ)
eine diagonalisierende Darstellung, die A in den v-Operator λA überführt.
Dann ist ejA auf dem Definitionsbereich
Z n
o
2
DejA = f ∈ E ejλA f (λ) dµ(λ) < ∞ = E
definiert durch
ejA f = T −1 ejλA f (λ) .
Es läßt sich leicht zeigen, daß ejA ein unitärer Operator ist.
Beispiel 3.2 Wir betrachten den Hilbertraum E = L2 (R, µℓ ) und den Operator A = 1j ∂x . Durch
Anwendung der Transformation T = F (Fourier-Transformation) läßt sich zeigen, daß bei
U = ejρA = eρ∂x gilt:
U f (x) = f (x + ρ) ,
f (x) ∈ L2 (R, µℓ ) ,
ρ ∈ R;
d. h. eρ∂x entspricht der Translation um den Wert ρ. Das selbe Ergebnis erhält man auch
durch eine heuristische Überlegung, wenn man ejρ∂x formal als Potenzreihe anschreibt:
eρ∂x =
∞
X
ρn dn
f (x) = f (x + ρ)
n! dxn
n=0
(Die linke Gleichung erhält man, indem man die ‘Exponentialfunktion’ eρ∂x formal als Potenzreihe anschreibt, und die zweite Gleichung entspricht der Taylorreihen-Entwicklung von
f (x + ρ)).
Sind A und B zwei kommutierende s.a. Operatoren (eventuell auch A = B), so kann
man auf die oben beschriebene Art und Weise das Produkt AB und die Summe
A + B definieren. Im Abschnitt 1.3.1 haben wir aber Produkt und Summe linearer
Operatoren bereits definiert. Mit den Symbolen
A+B
und
AB
bezeichnen wir stets die im Abschnitt 1.3.1 definierten Operationen. Die im Sinne
von (3.5) definierten Summen und Produkte bezeichnen wir mit
A+B
und
AB
82
KAPITEL 3. ZUSÄTZLICHE MATHEMATISCHE KONZEPTE
und sprechen in diesem Zusammenhang von starker Summe und starkem Produkt.
Aus der Tatsache, daß A und B kommutierende s.a. Operatoren sind5 , folgt,
daß A + B und AB dicht definiert sind (Siehe z. B. de Dormale/Gautrin [11],
Preposition 3). Weiters sieht man leicht, daß
DAB ⊆ DAB .
DA+B ⊆ DA+B ,
Das folgende Beispiel zeigt aber, daß DA+B echt größer als DA+B sein kann: sei
B = −A und DA 6= E; dann ist A + B der Nulloperator auf DA und A + B der
Nulloperator auf ganz E; A + B ist somit eine echte Erweiterung von A + B.
Allgemein kann man sagen, daß A + B die kleinste abgeschlossene Erweiterung
(die sogenannte Abschließung) von A+B ist. Analog dazu ist AB die Abschließung
von AB.
Beweis: A + B ist s.a. und somit abgeschlossen. Es muß noch gezeigt werden, daß
A + B die kleinste abgeschlossene Erweiterung von A+ B ist (daß also A + B in jeder
abgeschlossenen Erweiterung von A + B enthalten ist). Sei
T : E −→ L2 RI , µ
f 7−→ f (λ)
eine unitäre Transformation, die A, B in die v-Operatoren λA , λB überführt. Für
beliebiges f ∈ DA+B gilt
Z
Z
2
2
λ2A + λ2B |f (λ)| dµ(λ) < ∞.
|f (λ)| dµ(λ) < ∞,
Sei
χk (λ) :=
Man sieht leicht, daß bei
1 für |λA | ≤ k, |λB | ≤ k
.
0 sonst
fk (λ) := f (λ) χk (λ)
stets
fk ∈ DA ∩ DB = DA+B
H
fk −→ f.
und
Weiters ist
(A + B) fk (λ) − A + B f (λ)2 =
Z
|λA |>k
|λB |>k
2
λ2A + λ2B |f (λ)| dµ(λ) .
Da dieses Integral bei anwachsendem k beliebig klein wird, gilt
H
(A + B)fk −→ (A + B)f.
Der Vektor f liegt somit im Definitionsbereich jeder abgeschlossenen Erweiterung
von A + B.
Völlig analog zeigt man, daß AB die Abschließung von AB ist.
QED.
5
Wir haben das starke Produkt und die starke Summe nur für kommutierende s.a. Operatoren
definiert.
83
3.2. FUNKTIONEN VON OBSERVABLEN
Ein wichtiger Sonderfall ergibt sich für A2 = AA; es läßt sich zeigen, daß
AA = AA
Der Ausdruck A2 kann somit wahlweise als AA oder als AA = T −1 λ2A T aufgefaßt
werden (Analoges gilt für An ).
Beweis: Sei
T :E
f
−→ L2 RI , µ
7−→ f (λ)
eine unitäre Transformation, die A in den v-Operator λA überführt. Sei An :=
AA · · · A und An := T −1 λnA T . Für f ∈ DAn gilt:
Z
Z
2
2
|f (λ)| dµ(λ) < ∞,
λ2n
A |f (λ)| dµ(λ) < ∞.
Für 0 ≤ m ≤ n gilt:
Z
2
λ2m
A |f (λ)| dµ(λ) =
Z
λ2m
A
2
|f (λ)| dµ(λ) +
|λA |<1
≤
Z
2
|f (λ)| dµ(λ) +
|λA |<1
≤
Z
2
|f (λ)| dµ(λ) +
Z
Z
Z
2
λ2m
A |f (λ)| dµ(λ)
|λA |≥1
2
λ2n
A |f (λ)| dµ(λ)
|λA |≥1
2
λ2n
A |f (λ)| dµ(λ) < ∞.
I
es ist somit λm
A f (λ) ∈ L2 R , µ für m = 1, 2, 3, . . . , n. Hieraus folgt f ∈ DAn . QED.
Satz 3.6 Seien A und B zwei s.a. Operatoren. Die 3 folgenden Aussagen sind dann
äquivalent:
a) A kommutiert mit B
b) ∀t, d ∈ R : ejAd ejBt = ejBt ejAd
c) ∀t ∈ R : AejBt = ejBt A.
Beweis:
a)⇒b): Folgt aus Satz 1.32.
b)⇒a): Siehe z. B. Reed/Simon [35], Theorem VIII.13.
a)⇒c): Wenn a) erfüllt ist, so folgt aus Satz 1.32 zunächst nur AejBt ⊇ ejBt A. Um c)
zu zeigen, muß man noch beweisen, daß AejBt denselben Definitionsbereich
wie A hat (denn A hat stets denselben Definitionsbereich wie ejBt A). Hierzu
betrachten wir zwei zu A und B unitäräquivalente v-Operatoren λA , λB und
stellen fest, daß
Z
Z
2
λ2A ejλB t |f (λ)|2 dµ(λ) < ∞ ⇐⇒
λ2A |f (λ)|2 dµ(λ) < ∞.
| {z }
1
84
KAPITEL 3. ZUSÄTZLICHE MATHEMATISCHE KONZEPTE
c)⇒b): cos Bt und sin Bt sind offensichtlich beschränkte s.a. Operatoren und es gilt
cos Bt =
und
1 jBt
e
+ e−jBt ,
2
sin Bt =
1 jBt
e
− e−jBt
2j
ejBt = cos Bt + j sin Bt.
Man zeigt leicht, daß die Operatoren A, cos Bt, sin Bt kommutieren; es
gibt somit eine unitäre Transformation Pt , die A, cos Bt, sin Bt in die vOperatoren λA , λC , λS überführt. Offensichtlich kommutiert der Multiplikationsoperator ejλA d mit dem Multiplikationsoperator λC + jλS . Hieraus
folgt aber, daß ejAd mit ejBt kommutiert.
QED.
3.3
Die v. Neumann-Methode
Definition 3.3 Sei {E∆ } m eine Menge, in der es für jedes meßbare ∆ ⊆ R einen
∆⊆R
Operator E∆ im Hilbertraum E gibt. Diese Operator-Menge heißt Spektralschar,
wenn folgende Bedingungen erfüllt sind:
i) Jedes E∆ ist ein Projektor
ii) E∅ = 0,
ER = 1
iii) E∆1 E∆2 = E∆1 ∩∆2
iv) Wenn ∆ =
∞
S
k=1
∆k mit ∆k ∩ ∆ℓ = 0 für k 6= ℓ, so gilt für alle f ∈ E:
E∆ f = H- lim
N →∞
N
X
E∆k f.
k=1
An Stelle der Bezeichnung Spektralschar findet man auch die Bezeichnungen Spektralmaß, Spektralfamilie und projektorwertiges Maß.
Häufig wird an Stelle von {E∆ } m auch die Menge {Êα }α∈R mit
∆⊆R
Êα := E]−∞,α]
(3.6)
verwendet. Über (3.6) können {E∆ } m und {Êα }α∈R aber stets eindeutig und um∆⊆R
kehrbar ineinander übergeführt werden (Denn für ein beliebiges Intervall ∆ =]a, b]
gilt E∆ = Êb − Êa . Durch Bilden von Vereinigungen und Durchschnitten lassen sich
mit Hilfe solcher Intervalle alle meßbaren Teilmengen von R aufbauen).
Ist {E∆ } m eine Spektralschar und f ein beliebiger Vektor aus dem Hilber∆⊆R
traum E, so kann man leicht zeigen, daß
Pf (∆) := kE∆ f k2 = hf | E∆ f i
ein Maß auf R ist.
85
3.3. DIE V. NEUMANN-METHODE
Satz 3.7 (Spektralsatz) Zu jedem s.a. Operator A : DA → E gibt es eine eindeuA
tige Spektralschar {E∆
} m , sodaß für alle f ∈ DA gilt
∆⊆R
hf | Af i =
Z
A 2
PfA (∆) = E∆
f .
α dPfA (α) ,
(3.7)
Umgekehrt gibt es zu jeder Spektralschar einen eindeutigen s.a. Operator, der (3.7)
erfüllt.
Zusatz: Das Spektrum von A besteht aus allen α ∈ R, die keine offene meßbare
A
Umgebung ∆ ⊆ R mit E∆
= 0 haben.
Für die Gleichung (3.7) wird häufig auch
Z
A = α dEα
(3.8)
geschrieben6 .
Der eher abstrakte Begriff der Spektralschar wird anschaulicher, wenn man zu
einer diagonalisierenden Darstellung übergeht:
A
Satz 3.8 Sei A : DA → E ein s.a. Operator und {E∆
}
T : E −→ L2 RI , µ
f 7−→ f (λ)
m
∆⊆R
seine Spektralschar. Ist
eine diagonalisierende Darstellung, die A in den v-Operator λA überführt, so wird
E∆ in den Multiplikationsoperator
1 für λA ∈ ∆
χ∆ (λ) =
0 für λA ∈
/∆
übergeführt.
(Für einen Beweis siehe de Dormale/Gautrin [11], Lemma 5).
Aus diesem Satz ergibt sich — im Zusammenhang mit Axiom 4 — die physikalische Interpretation des Maßes PfA (∆):
A
Satz 3.9 Sei A eine Observable und {E∆
} m ihre Spektralschar; das quantenme∆⊆R
chanische System sei in einem Zustand |f i (mit kf k = 1). Die Wahrscheinlichkeit
m
bei einer Messung von A ein Ergebnis aus ∆ ⊆ R zu erhalten, ist gegeben durch
6
A 2
PfA (∆) = E∆
f = hf | E∆ f i.
Die Gleichung (3.8) kann als eine symbolische Abkürzung von (3.7) aufgefaßt werden. Führt
man aber einen geeigneten Integralbegriff ein, so ist (3.8) eine wohldefinierte mathematische Aussage, die sogar etwas stärker als (3.7) ist (Siehe z. B. Großmann [18]).
86
KAPITEL 3. ZUSÄTZLICHE MATHEMATISCHE KONZEPTE
PfA (∆) ist also die schon mehrmals erwähnte Wahrscheinlichkeitsverteilung für die
Observable A, wenn sich das System im Zustand |f i befindet.
Dieser Satz stellt das Fundament der von Neumannschen Formulierung der Quantenmechanik dar, wo er als Axiom eingeführt wird und somit unser Axiom 4 ersetzt.
Um eine vollständige Übereinstimmung mit Axiom 4 zu erreichen, muß obiger Satz
aber noch etwas verallgemeinert werden: hat man nicht nur eine Observable, sondern
einen ganzen Satz {Ai }i∈J kompatibler (=kommutierender) Observablen,
Q so kannJ
man nach der Wahrscheinlichkeit P (∆) fragen, ein Meßergebnis aus ∆ =
∆i ⊆ R
i∈J
zu erhalten. Die Verallgemeinerung von Satz 3.9 liefert
Y
2
Ai
P (∆) = E∆i f .
(3.9)
i∈J
Da die Observablen kompatibel sind, spielt die Reihenfolge, in der sie gemessen werden keine Rolle und man wird erwarten, daß (3.9) unabhängig von der Reihenfolge
Ai
ist, in der die Operatoren E∆
angeordnet sind. Tatsächlich gilt
i
A
Satz 3.10 Seien A und B zwei s.a. Operatoren mit den Spektralscharen {E∆
}
m
∆⊆R
B
und {E∆
} m . Die beiden Operatoren kommutieren genau dann, wenn für alle meß∆⊆R
baren ∆1 , ∆2 ⊆ R gilt:
A
B
B
A
E∆
E∆
= E∆
E∆
.
1
2
2
1
Die Kommutierbarkeit der Spektralscharen wird meistens sogar als Definition für
die Kommutierbarkeit unbeschränkter s.a. Operatoren herangezogen.
Abschließend geben wir eine zusammenfassende Übersicht über alle in dieser
Arbeit angeführten Kommutierbarkeitskriterien für s.a. Operatoren:
Satz 3.11 Seien A und B zwei s.a. Operatoren. Die folgenden Aussagen sind dann
äquivalent:
a) A und B kommutieren
e = T AT −1 , B
e = T BT −1 kommutieren
b) unitäräquivalente Operatoren A
c) Es existiert eine diagonalisierende Darstellung für {A, B}
d) ∀a, b ∈ C, Im(a) , Im(b) 6= 0 : (a − A)−1 (b − B)−1 = (b − B)−1 (a − A)−1
m
A
B
B
A
e) ∀∆1 , ∆2 ⊆ R : E∆
E∆
= E∆
E∆
1
2
2
1
f ) ∀d, t ∈ R : ejAd ejBt = ejBt ejAd
g) ∀t ∈ R : AejBt = ejBt A
Falls B beschränkt ist:
h) AB ⊇ BA
Falls A und B beschränkt sind:
i) AB = BA.
Kapitel 4
Entwicklung nach Eigenvektoren
4.1
4.1.1
Das Gelfandsche Raumtripel
Erweiterung des Hilbertraumes
In einem endlichdimensionalen Hilbertraum gibt es zu jedem s.a. Operator ein
vollständiges Orthonormalsystem von Eigenvektoren. In einem unendlichdimensionalen Hilbertraum E gilt das nicht mehr in voller Allgemeinheit und es gibt sogar
s.a. Operatoren, die keinen einzigen (eigentlichen) Eigenvektor haben. Um dennoch
eine Entwicklung nach Eigenvektoren zu ermöglichen, erweitert man den Hilbertraum E zu einen ‘aufgetakelten Hilbertraum’ der i. allg. als Rigged Hilbert Space
bezeichnet wird (abgekürzt: RHS). Es gibt verschiedene Möglichkeiten einen RHS
zu erhalten; die bekannteste ist jene des Gelfandschen Raumtripels, die wir im
Folgenden näher beschreiben werden.
Bei dieser Methode betrachtet man 3 ineinanderverschachtelte Räume (daher
der Name ‘Raumtripel’):
Φ ⊆ E ⊆ Φ′ .
Φ′ ist hierbei die gewünschte Erweiterung des Hilbertraumes E; der Raum Φ wird
benötigt, um Φ′ zu konstruieren. Φ′ wird topologisch dualer Raum von Φ genannt.
Zunächst werden wir aber an Stelle von Φ′ den sogenannten algebraisch dualen Raum
Φ∗ betrachten, der zwar umfangreicher ist als Φ′ , aber leichter beschrieben werden
kann; wir haben somit zunächst das Raumtripel
Φ ⊆ E ⊆ Φ∗ .
Den Raum Φ′ werden wir erst im Abschnitt 4.3 einführen.
4.1.2
Der Raum Φ
Definition 4.1 Sei {Bk }k∈K ein Satz linearer Operatoren im Hilbertraum E; Φ
sei ein linearer Teilraum von E. Wir nennen Φ einen invarianten Teilraum für
{Bk }k∈K , wenn für alle Bk gilt:
Bk Φ ⊆ Φ
87
88
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
(D. h. Φ liegt im Definitionsbereich von Bk und es gilt Bk ϕ ∈ Φ für alle ϕ ∈ Φ). Wir
sprechen von einem dichten invarianten Teilraum, wenn Φ dicht in E ist. Wir
nennen Φ einen maximalen invarianten Teilraum, wenn jeder andere invariante
Teilraum in Φ enthalten ist1 .
Definition 4.2 Sei {Bk }k∈K ein Satz linearer Operatoren (im Hilbertraum E) und
Φ der maximale invariante Teilraum. Sei Bk0 der auf den Definitionsbereich Φ eingeschränkte Operator Bk , also
Bk0 : Φ −→ Φ
f 7−→ Bk f.
Wir führen folgende Begriffe ein:
• Mit Prod0 {Bk}k∈K bezeichnen wir die Menge aller Φ → Φ - Operatoren, die
durch endliche Produkte der Bk0 entstehen. Der Einheitsoperator (in Φ) gehört
per definitionem ebenfalls dieser Menge an.
• Mit Alg0 {Bk}k∈K bezeichnen wir die Menge aller Φ → Φ - Operatoren die
aus endlichen Linearkombinationen der Elemente aus Prod0 {Bk }k∈K entstehen. Man nennt Alg0 {Bk }k∈K die von {Bk0 }k∈K generierte Algebra.
• Mit ErAlg {Bk}k∈K bezeichnen wir die Menge aller linearen Operatoren in
E, die Erweiterungen der Operatoren aus Alg0 {Bk }k∈K sind.
Es gilt offenbar
0
Bk k∈K ⊆ Prod0 {Bk }k∈K ⊆ Alg0 {Bk }k∈K ⊆ ErAlg {Bk }k∈K
{Bk }k∈K ⊆ ErAlg {Bk }k∈K .
Beispiel 4.1 Gegeben sei die Operatormenge {B1 , B2 , B3 }. Sei ferner
5 0 2
A01 := B10 B20
B1 ,
A02 := B30 .
3
Dann ist A01 , A02 ∈ Prod0 {Bk }k=1 . Der Operator
A0 := α1 A01 + α2 A02 + α3 B10 ,
ist ein Element aus
3
Alg0 {Bk }k=1 .
α1 , α2 , α3 ∈ C
Ist
A : DA −→ E,
DA ⊇ Φ
3
eine Erweiterung von A0 , so liegt A in ErAlg {Bk }k=1 (Insbesondere ist A0 eine — wenn
auch unechte — Erweiterung von A0 und liegt somit in ErAlg {Bk }3k=1 ).
1
Einen solchen
T maximalen invarianten Teilraum gibt es immer, und es läßt sich zeigen, daß
dieser gleich
DC ist; P sei hierbei die Menge aller Operatoren der Form
C∈P
C = Bk1 · Bk2 · · · Bkn ,
n ∈ N,
k1 , . . . , kn ∈ K;
DC sei der Definitionsbereich
des Operators C. (Beweis: Man sieht leicht, daß jeder invariante
T
Teilraum in Φm :=
DC liegt. Es bleibt somit nur noch zu zeigen, daß Φm invariant ist: für
C∈P
C ∈ P und Ĉ := CBk istTĈ ∈ P und somit Φm ⊆ DĈ ; folglich ist Bk Φm ⊆ DC ; da dies für alle
C ∈ P gilt, ist Bk Φm ⊆
DC = Φm ).
C∈P
89
4.1. DAS GELFANDSCHE RAUMTRIPEL
Definition 4.3 Sei {Bk }k∈K ein Satz s.a. Operatoren und Φ der maximale invariante Teilraum2. Wir nennen {Bk }k∈K eine Roberts-Basis, wenn gilt: In
ErAlg {Bk }k∈K gibt es einen s.a. Operator mit rein diskretem Spektrum, dessen Eigenwerte αν die Bedingung
X 1
<∞
|αν |
ν
erfüllen (entartete Eigenwerte gehen entsprechend ihrer Vielfachheit mehrfach in die
Summe ein. Null darf kein Eigenwert sein)3 .
Der folgende Satz zeigt, daß die Bedingungen aus Definition 4.3 in vielen wichtigen
Fällen automatisch erfüllt sind:
Satz 4.1 Sei {Bk }k∈K ein Satz selbstadjungierter Operatoren in L2 (Rn , µℓ ). Liegen die v-Operatoren λ1 , λ2 , . . . , λn und die Ableitungsoperatoren 1j ∂1 , 1j ∂2 , . . . , 1j ∂n
in ErAlg {Bk }k∈K , so ist {Bk }k∈K eine Roberts-Basis.
Beweis: Sei Qi der v-Operator λi , und Pi der Ableitungsoperator
mentation von Roberts [37] folgend betrachten wir den Operator
H̆ :=
n
X
i=1
1
j ∂i .
Der Argu-
Q2i + Pi2 .
Die Abschließung H von H̆ ist ein gut bekannter Operator (Hamilton-Operator des
n-dimensionalen harmonischen Oszillators). Er ist s.a. und hat das rein diskrete Spektrum
hν = n + 2ν,
ν = 0, 1, 2, . . . .
(Siehe z. B. Messiah [29], Abschnitt 12.3.1). Diese Eigenwerte haben die Vielfachheit
rν =
(ν + n − 1)!
(ν + n − 1) · · · (ν + 1)
=
≤ (2ν + n)n−1 .
ν! (n − 1)!
(n − 1)!
Der Operator A = H n+1 hat die Eigenwerte αν = hn+1
. Offenbar gilt:
ν
∞
X
ν=0
rν
∞
∞
X
X
1
1
1
=
rν
≤
< ∞.
n+1
|αν | ν=0 (n + 2ν)
(n
+
2ν)2
ν=0
QED.
Wenn die Bedingungen von Satz 4.1 erfüllt sind, so ist Φ ⊆ S(Rn ).
2
Die Bedingung der Selbstadjungiertheit kann etwas abgeschwächt werden: es genügt, daß die Bk
abgeschlossen sind und für jedes Bk der sogenannte adjungierte Operator Bk∗ in ErAlg {Bk }k∈K
liegt. Diese Bedingungen sind beispielsweise erfüllt, wenn alle Bk abgeschlossene symmetrische
Operatoren sind P
P 1
1
3
Die Bedingung
|αν | < ∞ kann noch etwas abgeschwächt werden: es genügt, wenn
|αν |q <
ν
ν
∞, für irgend ein q ∈ N (Denn wenn A die Eigenwerte αν hat und in ErAlg {Bk }k∈K liegt, so hat
Aq die Eigenwerte αqν und liegt ebenfalls in ErAlg {Bk }k∈K ).
90
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Definition 4.4 Sei {Ai }i∈J ein Satz kommutierender s.a. Operatoren im Hilbertraum E, und {Bk }k∈K sei eine Roberts-Basis mit dem maximalen invarianten Teilraum Φ. Wenn Φ dicht in E ist und
{Ai }i∈J ⊆ ErAlg {Bk }k∈K
gilt, nennen wir Φ einen (von {Bk }k∈K vermittelten) Roberts-Raum für {Ai }i∈J .
Offensichtlich ist ein Roberts-Raum immer ein dichter invarianter Teilraum für
{Ai }i∈J . Es wird sich zeigen, daß ein Roberts-Raum stets geeignet ist, um ein Gelfandsches Raumtripel zu konstruieren, das es ermöglicht über Entwicklung nach
Eigenvektoren eine diagonalisierende Darstellung für {Ai }i∈J zu ermitteln.
Wir zeigen nun an einem Beispiel, wie man in der Praxis einen Roberts-Raum
findet:
Beispiel 4.2 Im Hilbertraum L2 (R3 , µℓ ) seien folgende Operatoren definiert:
−1
a
△+
2M
|x|
3
3
XX
=
(xi ∂p xp ∂i − xi ∂p xi ∂p )
H̆ =
L̆2
i=1 p=1
L̆z
1
=
(x1 ∂2 − x2 ∂1 )
j
(x1 , x2 , x3 seien die v-Operatoren in L2 (R3 , µℓ )). Die Operatoren H̆, L˘2 , L˘z
sind e.s.a.; ihre selbstadjungierten Erweiterungen bezeichnen wir mit A1 =
H, A2 = L2 , A3 = Lz . Es läßt sich zeigen, daß {H, L2 , Lz } ein vollständiger
Satz kommutierender s.a. Operatoren ist (siehe de Dormale/Gautrin [12]).
Als Roberts-Basis {Bk }k∈K wählen wir
B1 = x1 , B2 = x2 , B3 = x3
B4 = 1j ∂1 , B5 = 1j ∂2 B6 = 1j ∂3
1
B7 = |x|
.
Nach Satz 4.1 ist {Bk }k∈K eine Roberts-Basis. Der maximale invariante Teilraum Φ von {Bk }k∈K hat die Gestalt
n
o
∂r ∂p ∂q
3 Φ = f (x) ∈ S R |
=
0,
r,
p,
q
∈
{0,
1,
2,
.
.
.}
.
f
(x)
x=0
∂xr1 ∂xp2 ∂xq3
(4.1)
3
D. h. Φ besteht aus allen Funktionen der Raumes S(R ), für die an der Stelle
x = 0 alle Ableitungen verschwinden.
Beweis: Da ErAlg {Bk }k∈K die v-Operatoren xi und die Ableitungsoperatoren
∂i enthält, muß der maximale invariante Teilraum Φ ⊆ S R3 sein. Folglich
1
muß für f (x) ∈ Φ stets B7 B4 f (x) ∈ S R3 sein. Aus |x|
∂1 f (x) stetig in 0 folgt
91
4.1. DAS GELFANDSCHE RAUMTRIPEL
aber, daß ∂1 f (x) in 0 verschwinden muß. Analog zeigt man, daß ∂1r ∂2p ∂3q f (x) in
0 verschwindet. Nun zeigen wir, daß das Φ aus (4.1) tatsächlich invariant für B7
ist (Für die anderen Bk ist die Invarianz offensichtlich). Die Taylorsche Formel
liefert (für n ∈ N):
n
f (x) = f (0) + f ′ (0) · x + xT · f ′′ (0) · x + . . . + ε(x) |x|
mit
lim ε(x) = 0.
x→0
Hieraus folgt
lim
x→0
1
n f (x) = 0.
|x|
(4.2)
mit Hilfe von (4.2) zeigt man leicht, daß
lim ∂1r ∂2p ∂3q
x→0
1
f (x) = 0.
|x|
QED.
Wegen Φ ⊇ C0∞ (R3 \ {O}) folgt aus Satz 1.10, daß Φ dicht in L2 (R3 , µℓ ) ist.
Da zusätzlich {A1 , A2 , A3 } ⊆ ErAlg {Bk }k∈K gilt, ist Φ ein Roberts-Raum für
{A1 , A2 , A3 }.
4.1.3
Der Raum Φ∗
Sei E ein Hilbertraum und Φ ein dichter linearer Teilraum von E. Um nicht zu abstrakt zu werden betrachten wir im Folgenden oft das Beispiel E = L2 (R, µℓ ) , Φ =
C0∞ (R). Die Elemente aus L2 (R, µℓ ) sind quadratintegrable Funktionen; die Elemente aus C0∞ (R) sind besonders ‘brave’ quadratintegrable Funktionen. Für eine Entwicklung nach Eigenfunktionen werden wir aber auch solche Funktionen benötigen,
die nicht quadratintegrabel sind. Ein wichtiges Beispiel einer nicht quadratintegrablen Funktion ist ejλ; offenbar gilt:
Z
jλ 2
e dµℓ (λ) =
Z∞
−∞
1 dλ = ∞.
(4.3)
Darüber hinaus benötigen wir aber auch noch ‘schwierigere’ Funktionen, wie etwa
die Diracsche δ-Funktion δ(λ), die genaugenommen gar keine echte Funktion ist4 .
Wir müssen somit eine Erweiterung des Hilbertraumes E vornehmen, die wir mit Φ∗
bezeichnen.
4
Häufig wird δ(λ) als Funktion mit folgender Gestalt angegeben:
0 für λ 6= 0
δ(λ) =
.
∞ für λ = 0
(4.4)
Daß dies keine wirkliche Charakterisierung der δ-Funktion ist, sieht man daran, daß (4.4) genaud2
sogut zu 5 · δ(λ) oder zu − dλ
2 δ(λ) paßt. (4.4) dient somit nur dazu, eine intuitive Vorstellung von
δ(λ) zu vermitteln (Im Abschnitt 4.1.4 werden wir näher auf δ(λ) eingehen).
92
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Da die Elemente aus Φ∗ i. allg. keine echten Funktionen sind, stellt sich die
Frage, wie man diese Elemente beschreiben kann. Um hierauf eine Antwort zu geben,
muß man wissen, wie die Elemente aus Φ∗ verwendet werden sollen. Im Abschnitt
4.2.3 werden wir sehen, daß die Elemente ξ aus Φ∗ benötigt werden, um mit ihnen
Skalarprodukte der Form
hξ | ϕi,
ϕ∈Φ
(4.5)
zu bilden5 . Wir verlangen daher von den Elementen aus Φ∗ , daß die Skalarprodukte
(4.5) eindeutig definiert sind. Wenn wir darüber hinaus noch fordern, daß hξ | ϕi
linear in ϕ ist, so ergibt sich folgende Definition:
Definition 4.5 Sei E ein Hilbertraum und Φ ein dichter linearer Teilraum. Die
Menge Φ∗ ist eine Erweiterung von E (also Φ∗ ⊇ E) mit folgenden Eigenschaften:
1) Für alle ξ ∈ Φ∗ und alle ϕ ∈ Φ ist ein Produkt
hξ | ϕi = hϕ | ξi ∈ C
definiert. Für ξ ∈ E stimmt dieses Produkt mit dem Skalarprodukt aus E überein.
2) Das Produkt ist linear im zweiten Faktor (und folglich antilinear im ersten
Faktor):
hξ | α1 ϕ1 + α2 ϕ2 i = α1 hξ | ϕ1 i + α2 hξ | ϕ2 i
hϕ | α1ξ1 + α2 ξ2 i = α1 hϕ | ξ1i + α2 hϕ | ξ2i.
3) Das Produkt charakterisiert die Elemente aus Φ∗ eindeutig, d. h.:
∀ϕ ∈ Φ : hξ1 | ϕi = hξ2 | ϕi =⇒ ξ1 = ξ2 .
Darüber hinaus fordern wir, daß Φ∗ maximal ist, d. h. es darf kein Φ∗1 ⊃ Φ∗ geben,
das obige 3 Bedingungen erfüllt.
Da wir E ⊆ Φ∗ fordern, muß natürlich gewährleistet sein, daß obige 3 Punkte für
alle Elemente aus E erfüllt sind. Man kann aber leicht nachprüfen, daß für ξ ∈ E
tatsächlich alle 3 Bedingungen immer erfüllt sind: für 1 und 2 ist dies offensichtlich;
3 ist erfüllt, weil Φ dicht in E ist.
Für festes ξ ∈ Φ∗ ist
ξ : Φ −→ C
ϕ 7−→ hξ | ϕi
eine lineare Abbildung von Φ in C. Eine Abbildung eines Vektorraumes Φ in die
Menge C wird Funktional genannt. In diesem Sinne definiert jedes ξ ∈ Φ∗ ein
5
Da hξ | ϕi i. allg. nur für ϕ ∈ Φ definiert ist (und nicht für alle ϕ ∈ Φ∗ ), ist der Ausdruck
Skalarprodukt nicht ganz gerechtfertigt.
93
4.1. DAS GELFANDSCHE RAUMTRIPEL
eindeutiges lineares Funktional über Φ. Wegen Punkt 3 von Definition 4.5 ist die
Zuordnung
ξ ←→ lineares Funktional
sogar umkehrbar eindeutig. Tatsächlich wird in eher mathematisch orientierten Texten an Stelle von Definition 4.5 folgende Formulierung gewählt:
Definition 4.5’ Φ∗ ist die Menge aller linearen Funktionale über Φ und heißt
(algebraisch) dualer Raum von Φ.
Die in Definition 4.5 geforderte Maximalität von Φ∗ garantiert, daß Φ∗ der Menge
aller linearen Funktionale entspricht, und nicht nur einen Teilmenge.
Wir betonen noch einmal, daß es für zwei beliebige Elemente ξ, η ∈ Φ∗ i. allg. kein
Produkt hξ | ηi gibt: wenn ξ in Φ∗ \ E liegt, so ist hξ | ηi nur für η ∈ Φ definiert.
Durch die Bedingung
hα1 ξ1 + α2 ϕ2 | ϕi = α1 hξ1 | ϕi + α2 hξ2 | ϕi
(4.6)
wird Φ∗ zum linearen Raum (Diese Gleichung ergibt sich aus den Punkten 1 und 2
von Definition 4.5). Wir weisen darauf hin, daß in der Distributionstheorie an Stelle
von (4.6) meistens die Bedingung
hα1 ξ1 + α2 ϕ2 | ϕi = α1 hξ1 | ϕi + α2 hξ2 | ϕi
gewählt wird. Es ist dann aber nicht möglich, den Hilbertraum E als (linear eingebetteten) Teilraum von Φ∗ aufzufassen, wie wir dies in Definition 4.5 gemacht haben.
4.1.4
Verallgemeinerte Funktionen
In diesem Abschnitt halten wir uns weiterhin das Beispiel E = L2 (R, µℓ ) , Φ =
C0∞ (R) vor Augen.
Wir wissen bereits, daß man ein Element ξ aus Φ∗ beschreiben kann, indem
man die Zahlen hξ | ϕi für alle ϕ ∈ Φ angibt. Diese Zahlen können in der Praxis
natürlich nicht explizit angegeben werden, sondern müssen über eine Rechenvorschrift definiert werden. Für ξ ∈ E ist dies ganz einfach: für ξ(λ) ∈ L2 (R, µℓ ) und
ϕ(λ) ∈ C0∞ (R) ist
Z
hξ | ϕi =
ξ(λ)ϕ(λ) dµℓ (λ) .
(4.7)
Durch Angabe der Funktion ξ(λ) können mit Hilfe der Rechenvorschrift (4.7) alle
Produkte hξ | ϕi ermittelt werden. Für ξ ∈ Φ∗ \ E kann es keine entsprechende
quadratintegrable Funktion geben (denn sonst wäre ξ ∈ E); es kann aber eine nicht
quadratintegrable Funktion ξ(λ) geben, die in (4.7) einzusetzen ist.
Beispiel 4.3 Sei ξ(λ) := ejλ . Diese Funktion ist nicht quadratintegrabel (siehe
Gleichung (4.3)). Für ϕ(λ) ∈ C0∞ (R) = Φ ist (4.7) aber eindeutig definiert
und offensichtlich linear in ϕ. Die Funktion ξ(λ) = ejλ definiert somit ein
eindeutiges Element aus Φ∗ . An dieser Stelle erkennt man auch, warum wir
Φ ⊆ E und nicht Φ = E wählen müssen: für beliebige ϕ(λ) ∈ L2 (R, µℓ ) ist
das Integral (4.7) nicht konvergent; für alle ϕ(λ) ∈ C0∞ (R) ist die Konvergenz
dagegen gewährleistet.
94
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Es gibt aber auch Elemente in Φ∗ , für die es kein Integral der Form (4.7) gibt,
sondern nur eine integralähnliche Rechenvorschrift:
Beispiel 4.4 Wir betrachten den Ausdruck
Z
1
ϕ(λ) dµℓ (λ) ,
hξ | ϕi =
λ
ϕ(λ) ∈ C0∞ (R) .
Dieses Integral ist auch für ϕ(λ) ∈ C0∞ (R) i. allg. divergent (wegen der Singularität in λ = 0). Andererseits existiert aber der sogenannte Hauptwert des
Integrals:
Z
Z
1
1
HW
ϕ(λ) dµℓ (λ) := lim
ϕ(λ) dµℓ (λ) .
ǫ→0
λ
λ
|λ|≥ǫ
Definiert man hξ | ϕi über obiges Hauptwert-Integral, so wird dadurch wieder ein eindeutiges Element aus Φ∗ definiert. Es reicht hier aber nicht mehr
aus, die Funktion λ1 anzugeben, sondern es muß explizit dazugesagt werden,
wie das entsprechende Integral zu bilden ist, nämlich als Hauptwert-Integral.
Manchmal schreibt man in diesem Zusammenhang
1
ξ(λ) = HW .
λ
Funktionen des Typs HW λ1 nennen wir verallgemeinerte Funktionen. Eine verallgemeinerte Funktion besteht also aus einer mehr oder weniger genau definierten
Funktionsvorschrift (wie etwa ejλ oder λ1 ) und einer explizit angegebenen Zusatzvorschrift, die besagt, nach welchen Regeln das Integral
Z
hξ | ϕi = ξ(λ)ϕ(λ) dµℓ (λ) ,
ϕ∈Φ
zu bilden ist. Im Beispiel 4.3 hatten wir die Funktionsvorschrift ejλ und die (triviale)
Zusatzvorschrift “berechne das Integral als ganz gewöhnliches (Lebesgue-) Integral”.
Im Beispiel 4.4 hatten wir dagegen die Funktionsvorschrift λ1 und die Zusatzvorschrift
“bilde den Hauptwert des Integrals”. Im folgenden Beispiel wird die Zusatzvorschrift
derart sein, daß eigentlich nichts mehr an ein gewöhnliches Integral erinnert:
Beispiel 4.5 Wir betrachten die verallgemeinerte Funktion δ(λ), die Diracsche
Delta-Funktion genannt wird. Für δ(λ) wird oft die Funktionsvorschrift
0 für λ 6= 0
δ(λ) =
(4.8)
∞ für λ = 0
angegeben. Abgesehen davon, daß (4.8) keine echte R → C - Funktion beschreibt
R (da ∞ keine Zahl ist), reicht (4.8) bei weitem nicht aus, um das Integral δ(λ) ϕ(λ) dµℓ (λ) zu definieren. Das Integral wird hier genaugenommen
ausschließlich durch die Zusatzvorschrift definiert; diese lautet:
Z
δ(λ) ϕ(λ) dµ(λ) := ϕ(0)
ϕ∈Φ
(4.9)
95
4.1. DAS GELFANDSCHE RAUMTRIPEL
(Wir haben hier die Konjugiums-Bildung weggelassen, da δ(λ) := δ(λ)). Dieser
Ausdruck ist offenbar linear in ϕ und definiert somit ein eindeutiges Element
aus Φ∗ .
Die Beispiele 4.3 und 4.5 stellen somit zwei Extremfälle dar: im Beispiel 4.3 war
die verallgemeinerte Funktion ξ(λ) vollständig durch die Funktionsvorschrift
ejλ bestimmt; die Zusatzvorschrift war dort trivial. Im vorliegenden Beispiel
4.5 wird das Integral ausschließlich durch die Zusatzvorschrift (4.9) bestimmt;
die Funktionsvorschrift (4.8) dient hier eigentlich nur dazu, eine anschauliche
Vorstellung von der verallgemeinerten Funktion δ(λ) zu vermitteln.
Eine wesentlich bessere Vorstellung von δ(λ) erhält man aber auf folgende
Weise:
man betrachtet eine Folge nadelartiger Funktionen, die für k → ∞ immer
schmäler und immer höher werden, sodaß die Normierung
Z
δk (λ) dµℓ (λ) = 1
für alle k erfüllt ist (Siehe Abbildung 4.1). Offenbar gilt dann
lim
k→∞
Z
δk (λ) ϕ(λ) dµℓ (λ) = ϕ(0) .
δ(λ) kann in diesem Sinne als ‘Grenzfunktion’ der Folge δk (λ) aufgefaßt werden.
G O
G O
GO
O
Abbildung 4.1
Analog zur bisher besprochenen ‘eindimensionalen’ δ-Funktion kann man bei
E = L2 (Rn , µℓ ) auch eine ‘n-dimensionale’ δ-Funktion definieren:
Z
δ(λ) ϕ(λ) dµℓ (λ) = ϕ(0) ,
für alle ϕ(λ) ∈ Φ ⊆ L2 (Rn , µℓ ) (Z. B. Φ = C0∞ (Rn ) oder Φ = S(Rn )).
96
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Beispiel 4.6 Wir definieren ein ξ ∈ Φ∗ durch
Z
Z
jλ
hξ | ϕi = (e + δ(λ))ϕ(λ) dµℓ (λ) =
e−jλ + δ(λ) ϕ(λ) dµℓ (λ) .
Nach dem bisher gesagten dürfte auch ohne zusätzliche Erläuterungen klar
sein, wie diese Integral zu verstehen ist: es entspricht der Summe
Z
Z
−jλ
e ϕ(λ) dµℓ (λ) + δ(λ) ϕ(λ) dµℓ (λ) ,
wobei der erste Summand ein gewöhnliches Integral ist, und der zweite Summand für ϕ(0) steht.
97
4.2. DIE VERALLGEMEINERTEN EIGENVEKTOREN
4.2
Die verallgemeinerten Eigenvektoren
4.2.1
Erweiterung des Definitionsbereiches auf ganz Φ∗
Definition 4.6 Sei A ein s.a. Operator mit Definitionsbereich DA ⊆ E, und Φ ⊆ E
sei ein dichter invarianter Teilraum (d. h. Φ dicht in E und AΦ ⊆ Φ). Für ξ ∈ Φ∗
definieren wir die Wirkung von A durch
∀ϕ ∈ Φ : hAξ | ϕi = hξ | Aϕi
(4.10)
d. h. Aξ ist jener eindeutig bestimmte Vektor η ∈ Φ∗ , der
∀ϕ ∈ Φ : hη | ϕi = hξ | Aϕi
erfüllt.
Wegen der Selbstadjungiertheit von A ist (4.10) für alle ξ ∈ DA automatisch
erfüllt. Darüber hinaus definiert (4.10) die Wirkung von A aber für alle Elemente
aus Φ∗ . Wir haben somit den ursprünglichen Operator
A : DA −→ E
(4.11)
A : Φ∗ −→ Φ∗
(4.12)
zu einem Operator
erweitert. Obwohl dies nicht sehr konsequent ist, verwenden wir für den s.a. Operator (4.11) und den Erweiterten Operator (4.12) dasselbe Symbol, nämlich ‘A’; in
Zweifelsfällen muß dann explizit angegeben werden, welcher der beiden Operatoren
gemeint ist.
Wir weisen noch einmal darauf hin, daß Definition 4.6 nur für s.a. Operatoren anzuwenden ist. Sie kann beispielsweise für 1j ∂λ angewandt werden, nicht aber für ∂λ .
Für nicht s.a. Operatoren muß Definition 4.6 geringfügig abgeändert werden: An die
Stelle von (4.10) tritt die Gleichung
hAξ | ϕi = hξ | A∗ ϕi.
Hierbei ist A∗ der sogenannte adjungierte Operator. Der adjungierte Operator von
∂λ ist beispielsweise der Operator −∂λ . Wir wollen hier aber nicht näher auf diese
Verallgemeinerung und die damit verbundenen Komplikationen eingehen.
Die folgenden Beispiele zeigen, wie obige Definition in der Praxis gehandhabt werden
kann; wir nehmen hierbei wieder den Fall E = L2 (R, µℓ ) , Φ = C0∞ (R) an.
Beispiel 4.7 Wir betrachten den s.a. Operator 1j ∂λ . Der Raum C0∞ (R) ⊆ L2 (R, µℓ )
ist offensichtlich invariant für 1j ∂λ .
Die verallgemeinerte Funktion ξ(λ) = ejλ entspricht einem Element aus Φ∗
(siehe Beispiel 4.3). Man wird natürlich sofort vermuten, daß
1
∂λ ejλ = ejλ .
j
(4.13)
98
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Diese Vermutung ist auch tatsächlich korrekt, denn über partielle Integration
erhält man die Beziehung
Z
Z
1 d
−jλ
e ϕ(λ) dµℓ (λ) = e−jλ
ϕ(λ) dµℓ (λ) ,
ϕ(λ) ∈ C0∞ (R) ;
j dλ
nach Definition 4.6 ist dies gleichbedeutend mit (4.13).
Bei so einfachen Fällen ist es sehr leicht, intuitiv zum richtigen Ergebnis zu
gelangen, und es ist daher sehr oft nicht nötig, explizit mit der Gleichung (4.10)
zu arbeiten.
Beispiel 4.8 Wir betrachten wieder den Operator 1j ∂λ , den wir diesmal auf die
verallgemeinerte Funktion
0 für λ < 0
ξ(λ) =
1 für λ ≥ 0
anwenden wollen. Da ξ(λ) nicht differenzierbar ist, betrachten wir zunächst
die Funktion ξε (λ) (siehe Abbildung 4.2).
[ H O
[O
O
H
[ H O
Fläche = 1
H
Abbildung 4.2
O
H
H
__
d [ O
dO H
O
Für ε → 0 nähert sich ξε (λ) der Funktion ξ(λ) und die Ableitung ξε′ (λ) wird
immer schmäler und höher. Analog zu den δk (λ) aus Beispiel 4.5, nähert sich
ξε′ (λ) der verallgemeinerten Funktion δ(λ). Naheliegenderweise vermutet man
1
1
∂λ ξ(λ) = δ(λ) .
j
j
Mit Gleichung (4.10) aus Definition 4.6 kann dies sofort bestätigt werden:
Z
1
1
1
h ∂λ ξ | ϕi = hξ | ∂λ ϕi =
ξ(λ) ϕ′ (λ) dµℓ (λ)
j
j
j
Z∞
1
1
1
=
ϕ′ (λ) dλ = ϕ(λ) |∞
0 = jϕ(0) = h δ | ϕi.
j
j
j
0
4.2. DIE VERALLGEMEINERTEN EIGENVEKTOREN
99
Beispiel 4.9 Wir wollen 1j ∂λ δ(λ) ermitteln. Gleichung (4.10) liefert:
1
1
1
h ∂λ δ | ϕi = hδ | ∂λ ϕi = ϕ′ (0) .
j
j
j
Will man die so definierte verallgemeinerte Funktion veranschaulichen, so ist
es günstig, wieder die nadelartigen Funktionen δk (λ) aus Beispiel 4.5 (Seite 95)
d
zu betrachten; man bildet dann die Ableitungen 1j dλ
δk (λ) und läßt k gegen ∞
streben.
Beispiel 4.10 Wir betrachten den v-Operator λ. Bei verallgemeinerten Funktionen
der Art ejλ oder HW λ1 gibt es keine Zweifel darüber, wie dieser Operator
anzuwenden ist. Undurchsichtiger ist dagegen der Ausdruck λδ(λ). Denn λ
hat bei λ = 0 eine Nullstelle und δ(λ) hat nach der heuristischen Gleichung
(4.8) bei λ = 0 eine Unendlichkeitsstelle; man hat somit das unbestimmte
Produkt 0 · ∞.
Mit Definition 4.6 erhält man
hλδ | ϕi = hδ | λϕi = (λϕ(λ)) |λ=0 .
Da ϕ(λ) stetig ist, hat die Funktion λϕ(λ) in λ = 0 eine Nullstelle. Folglich
ist hλδ | ϕi = 0; λδ(λ) entspricht somit der Nullfunktion.
4.2.2
Die Eigenwertgleichung
Definition 4.7 Sei A ein s.a. Operator im Hilbertraum E, und Φ ⊆ E ein dichter
invarianter Teilraum. Gibt es zu einem λ ∈ R einen (von O verschiedenen) Vektor
ξ ∈ Φ∗ , für den
Aξ = λξ,
(4.14)
so nennen wir λ einen verallgemeinerten Eigenwert (von A) und ξ einen zugehörigen verallgemeinerten Eigenvektor.
Wenn ξ im Definitionsbereich DA des s.a. Operators A liegt, so ist ξ ein eigentlicher Eigenvektor und λ ein eigentlicher Eigenwert (siehe Definition 1.27). Bei
ξ ∈
/ DA sprechen wir von uneigentlichem Eigenvektor bzw. uneigentlichem
Eigenwert6 .
Wir unterstreichen, daß uns nur die reellen Eigenwerte interessieren. Die eigentlichen Eigenwerte eines s.a. Operators sind ohnedies stets reell; bei uneigentlichen
Eigenwerten muß dies aber explizit gefordert werden, da Gleichung (4.14) im Prinzip
auch für λ ∈ C \ R erfüllt sein kann7 .
6
Ist A auf Φ e.s.a., so liegen alle uneigentlichen Eigenvektoren außerhalb von E, d. h. es gibt
dann keine Eigenvektoren in E \ DA .
7
Für eine Interpretation und Anwendung komplexer Eigenwerte siehe Arno Bohm [8], 1989.
100
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Definition 4.8 Sei {Ai }i∈J ein Satz s.a. Operatoren im Hilbertraum E, und Φ ⊆ E
ein dichter invarianter Teilraum. Ein ξ ∈ Φ∗ heißt gemeinsamer (verallgemeinerter) Eigenvektor für die Ai , wenn gilt:
∀i ∈ J : ∃λi ∈ R : Ai ξ = λi ξ.
Offenbar gehört zu einem solchen Eigenvektor ein ganzes Tupel (λi )i∈J von Eigenwerten; dieses Eigenwert-Tupel nennen wir multiplen Eigenwert.
Diese Definition ist eigentlich trivial. Wir haben sie nur deshalb explizit angeführt, um zu betonen, daß zu einem gemeinsamen Eigenvektor ein ganzer Satz
von Eigenwerten gehört, und daß wir nur dann von einem gemeinsamen Eigenvektor sprechen, wenn ein gemeinsamer dichter invarianter Teilraum vorliegt.
4.2.3
Die Berechnung der Spektraldarstellung
Satz 4.2 (Entwicklung nach Eigenvektoren) Sei {Ai }i∈I ein vollständiger
Satz kommutierender s.a. Operatoren im (separablen) Hilbertraum E, und Φ sei ein
entsprechender Roberts-Raum8 . Ist
T : E −→ L2 RI , µ
(4.15)
f 7−→ f (λ)
eine Spektraldarstellung für {Ai }i∈I , so gilt: Für fast alle λ ∈ RI (d. h. für alle
λ ∈ RI \ N mit µ(N) = 0) gibt es einen Vektor ξλ ∈ Φ∗ , sodaß:
• ξλ ist ein gemeinsamer Eigenvektor der Ai zum multiplen Eigenwert λ, d. h.:
∀i ∈ I : Ai ξλ = λi ξλ ,
ξλ ∈ Φ∗ .
• Für f ∈ Φ und f (λ) = T f gilt
f (λ) = hξλ | f i a.e..
(4.16)
Mit Hilfe der Eigenvektoren kann also über die Gleichung (4.16) direkt die Spektraldarstellung angegeben werden. Die Tatsache, daß (4.16) zunächst nur für f ∈ Φ
definiert ist, stellt dabei kein großes Problem dar: für f ∈ E \ Φ sucht man eine
H
Folge (fk )k=1,2,3,... in Φ mit fk −→ f (Da Φ dicht in E ist, gibt es eine solche Folge
immer); die Funktionen fk (λ) lassen sich nach (4.16) ermitteln, und es gilt
f (λ) = H-lim fk (λ)
k→∞
8
(4.17)
Im Prinzip reicht es aus, daß Φ ein dichter invarianter Teilraum ist, auf dem sich eine nukleare
Topologie definieren läßt, die stärker ist als die Hilbertraum-Topologie und bezüglich der alle Ai
stetig sind (Genaueres hierzu im Abschnitt 4.3.4). Ist I endlich oder abzählbar, so ist die Existenz
eines solchen Raumes gesichert (Siehe Seite 116).
101
4.2. DIE VERALLGEMEINERTEN EIGENVEKTOREN
(Dies folgt aus der Tatsache, daß T unitär — und damit stetig — ist).
Den Beweis von Satz 4.2 werden wir im Abschnitt 4.3 nachholen.
Um mit Hilfe des obigen Satzes eine Spektraldarstellung T zu finden, ist es
offenbar notwendig die gemeinsamen Eigenvektoren der Ai zu ermittelt. Darüber
hinaus müssen aber noch die folgenden 3 Fragen geklärt werden:
a) Wie findet man das Maß µ?
b) Wenn ξλ ein Eigenvektor ist, so ist (für beliebiges α ∈ C \ {0}) offensichtlich
auch αξλ ein Eigenvektor zum selben multiplen Eigenwert. Es stellt sich somit die Frage, wie der Faktor α bestimmt werden kann. Man bezeichnet die
Bestimmung dieses Faktors häufig als Normierung der Eigenvektoren.
c) Auch dann, wenn man von der unter b) geschilderten Mehrdeutigkeit absieht,
gehen im allgemeinen nicht alle Eigenvektoren in die Entwicklung (4.16) ein.
Man muß daher unter Umständen eine gewisse Auswahl treffen, was natürlich
sofort die Frage aufwirft, wie man die richtigen von den falschen Eigenvektoren
unterscheiden kann.
Um auf diese Fragen näher eingehen zu können, müssen wir zunächst ein Kriterium
angeben, das es in konkreten Fällen gestattet eindeutig festzustellen, ob man eine
Spektraldarstellung gefunden hat:
Satz 4.3 Sei {Ai }i∈J ein Satz s.a. Operatoren im Hilbertraum E. Φ ⊆ E sei ein
dichter invarianter Teilraum, und {ξλ }λ∈F ⊆RI sei ein Satz gemeinsamer Eigenvektoren, d. h.
Ai ξλ = λi ξλ ,
ξλ ∈ Φ∗ .
µ sei ein σ-finites Maß auf RI mit µ RI \ F = 0 (d. h. für fast alle λ ∈ RI hat
man einen Eigenvektor ξλ). Der Operator
T : E −→ L2 RI , µ
f 7−→ f (λ)
sei wie folgt definiert:
für f ∈ Φ ist f (λ) = hξλ | f i
für f ∈ E \ Φ ist f (λ) = H- lim fk (λ) ,
(4.18)
H
mit fk −→ f und fk ∈ Φ. (4.19)
Die Abbildung T ist genau dann eine Spektraldarstellung für {Ai }i∈I , wenn folgende
3 Punkte erfüllt sind:
R
1) Längentreue: ∀ϕ ∈ Φ : kϕk2 = |ϕ(λ)|2 dµ(λ).
2) Surjektivität: ∀f (λ) ∈ L2 RI , µ : ∃f ∈ E : f (λ) = T f .
R
3) Definitionsbereich: ∀ψ ∈ ΨAi : λ2i |ψ(λ)|2 dµ(λ) < ∞ (für alle i ∈ I).
102
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Die ΨAi sind hierbei Bereiche, auf denen die Ai e.s.a. sind. Ist ein Ai auf Φ e.s.a., so
kann ΨAi = Φ gewählt werden; die Bedingung 3 ist dann für dieses Ai automatisch
erfüllt.
Bemerkung 1: In obigem Satz wird nicht vorausgesetzt, daß die Ai kommutieren.
Wenn aber die Bedingungen 1, 2 und 3 erfüllt sind, so ist {Ai }i∈I ein vollständiger
Satz kommutierender s.a. Operatoren.
Bemerkung 2: Es wird vorausgesetzt, daß T : E → L2 RI , µ eine wohldefinierte
Abbildung ist, daß also f (λ) aus (4.18) quadratintegrabel ist, und die Grenzfunktionen aus (4.19) stets (als quadratintegrable Funktionen) existieren. Diese Voraussetzung muß aber nicht zusätzlich überprüft werden, da sie automatisch erfüllt ist, wenn
Bedingung 1 zutrifft.
Beweis von Satz 4.3: Mit Hilfe der Bedingungen 1 und 2 zeigt man leicht, daß
T eine unitäre Transformation ist. Es muß also nur noch gezeigt werden, daß T die
Operatoren Ai in die v-Operatoren λi überführt.
Sei ψ ∈ ΨAi und ϕ ∈ Φ; dann ist
Z
Z
hϕ | Ai ψi = hAi ϕ | ψi = (Ai ϕ)(λ)ψ(λ) dµ(λ) = λi ϕ(λ)ψ(λ) dµ(λ)
|{z}
(4.20)
∈Φ
(Die letzte Gleichung gilt wegen (Ai ϕ)(λ) = hξλ | Ai ϕi = λi hξλ | ϕi). Aufgrund von
Bedingung 3 ist λi ψ(λ) eine quadratintegrable Funktion. Aus (4.20) folgt dann:
hϕ | Ai ψi = hϕ(λ) | λi ψ(λ)i = hϕ | T −1 λi T ψi.
Da dies für alle ϕ ∈ Φ gilt und Φ dicht in E ist, muß für ψ ∈ ΨAi stets
Ai ψ = T −1 λi T ψ
gelten. Man sieht somit: Bezeichnen wir die Einschränkung von Ai auf ΨAi mit A′i ,
so ist T −1 λi T eine s.a. Erweiterung von A′i . Da A′i e.s.a. ist, hat er nur eine s.a. Erweiterung, nämlich Ai . Somit ist Ai = T −1 λi T .
Wir zeigen noch, daß die Bedingung 3 automatisch erfüllt ist, wenn Ai auf Φ e.s.a. ist:
Mit ϕ ∈ Φ ist auch Ai ϕ ∈ Φ; wegen T Ai ϕ = (Ai ϕ)(λ) = hξλ | Ai ϕi = λi ϕ(λ), folgt
dann aus 1 die Beziehung
Z
2
2
λ2i |ϕ(λ)| dµ(λ) = kAi ϕk < ∞.
QED.
Nun werden wir näher auf die 3 offenen Fragen von Seite 101 eingehen, wobei wir
uns aber auf den Fall für endliches I beschränken. Wir beginnen mit der Frage c.
Bedauerlicherweise gibt es aber kein einfaches allgemeingültiges Kriterium, das es gestattet eine korrekte Auswahl der Eigenvektoren vorzunehmen. Man ist daher unter
Umständen auf heuristische Überlegungen angewiesen, um die tatsächlich ‘benötigten’ von den ‘unphysikalischen’ Eigenvektoren zu unterscheiden. Mit Hilfe von Satz
4.3 kann man dann nachträglich feststellen, ob man eine korrekte Auswahl getroffen
hat. Um das Erkennen der richtigen Eigenvektoren zu erleichtern ist es günstig, die
folgenden 3 Punkte zu beachten:
103
4.2. DIE VERALLGEMEINERTEN EIGENVEKTOREN
i) Für jedes λ ∈ RI kann höchstens ein Eigenvektor ξλ genommen werden9 .
T
ii) Die eigentlichen Eigenvektoren (das sind jene, die in i∈I DAi liegen) sind alle
zu nehmen.
iii) Jene uneigentlichen Eigenvektoren, die durch stark anwachsende verallgemeinerten Funktionen (wie etwa ex ) dargestellt werden, sind meistens zu verwerfen. Jene Eigenvektoren, die durch ‘brave’ verallgemeinerte Funktionen (wie
etwa ejx ) dargestellt werden, sind meistens zu nehmen.
Hat man die korrekte Auswahl der Eigenvektoren getroffen, so liegt folgende Aufteilung von RI vor:
F =
F =
P =
Menge der verallgemeinerten multiplen Eigenwerte (F ⊆ RI )
Abschließung der Menge F (es ist dann F ⊆ F ⊆ RI )
Menge der eigentlichen multiplen Eigenwerte (P ⊆ F ).
Die Festlegung des Maßes µ und die Normierung der Eigenvektoren kann nun folgendermaßen durchgeführt werden:
iv) Die Menge F entspricht dem Träger supp µ des Maßes µ
der Sprungpunkte.
10
. P ist die Menge
v) Den Sprungpunkten ordnet man das Maß 1 zu und die entsprechenden Eigenvektoren werden auf 1 normiert:
∀λ ∈ P : µ({λ}) = 1, kξλ k = 1.
vi) Das Maß auf F \ P und die Normierung der uneigentlichen Eigenvektoren
muß so gewählt werden, daß die Längentreue der Transformation T erfüllt
ist (Bedingung 1 von Satz 4.3). In der Praxis kann µ auf F \ P immer als
Lebesgue-Maß gewählt werden11 . Die Bedingung der Längentreue wird dann
nur mehr für die Normierung der uneigentlichen Eigenvektoren benötigt12 .
9
Diese Bedingung entsteht durch die Voraussetzung, daß der Observablen-Satz {Ai }i∈I
vollständig ist. Den Fall unvollständiger Observablen-Sätze werden wir erst im Abschnitt 4.2.6
behandeln.
10
Begründung: Da man außerhalb von supp µ keine Eigenwerte braucht, ist supp µ ⊇ F ; da
supp µ abgeschlossen ist, gilt sogar supp µ ⊇ F . Wäre aber supp µ ⊃ F , so gäbe es in supp µ \ F
einenPunkt λ mit einer offenen meßbaren Umgebung U , die außerhalb von F liegt (denn, wenn
jede Umgebung von λ einen Punkt aus F enthält, so ist λ ∈ F ). Da es in U keine Eigenwerte gibt,
muß µ(U ) = 0 sein, was aber ein Widerspruch zu λ ∈ supp µ ist.
11
Eine ausführliche Begründung für diesen Sachverhalt findet man in [36]
12
‘Normieren’ heißt hier einen geeigneten multiplikativen Faktor zu finden (Siehe Punkt b von
Seite 101). Über die Bedingung der Längentreue kann (bei gegebenem Maß) aber nur der Betrag
dieser Faktoren bestimmt werden; es bleiben somit noch unbestimmte Phasenfaktoren. Tatsächlich
gibt es (selbst bei gegebenem Maß µ) mehrere Möglichkeiten eine Spektraldarstellung zu bilden
(Siehe Seite 44).
104
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Das Maß µ hat also folgende Struktur:
µ(∆) = µℓ0 (∆) + µp (∆) ,
m
∆ ⊆ RI ,
wobei
µp (∆) = Anzahl der Sprungpunkte in ∆
µℓ0 (∆) = µℓ ∆ ∩ F .
Gelingt es im Punkt vi) nicht, die Längentreue zu erfüllen, so hat man offenbar in
iii) eine falsche Auswahl der Eigenvektoren getroffen. Um aber absolut sicher zu
sein, daß die in iii) getroffene Auswahl korrekt ist, muß man auch die Bedingungen
2 und 3 aus Satz 4.3 prüfen. Die Bedingung 2 dürfte meistens (möglicherweise sogar
immer) automatisch erfüllt sein, wenn man nach obigem Schema vorgeht (und Bedingung 1 erfüllt ist). Sollte Bedingung 3 nicht erfüllt sein, so hat man ebenfalls eine
falsche Auswahl an Eigenvektoren getroffen: man hat dann zwar eine Spektraldarstellung gefunden, nicht aber eine für die Operatoren Ai , sondern eine für andere
s.a. Operatoren, die auf Φ mit den Ai übereinstimmen.
4.2.4
Beispiel: Spektraldarstellung für den Operator 1j ∂x
Wir betrachten den Hilbertraum E = L2 (R, µℓ ) und den s.a. Operator 1j ∂x , der in E
einen vollständigen Satz bildet. Gesucht sei eine Spektraldarstellung
T : L2 (R, µℓ ) −→ L2 (R, µ)
f (x) 7−→ fe(λ) ,
die 1j ∂x in den v-Operator λ überführt. Über die Roberts-Basis {x, 1j ∂x } erhält man
den Roberts-Raum
Φ = S(R) .
Man prüft leicht nach, daß die verallgemeinerten Funktionen
ξλ (x) = kλ ejλx
(kλ ∈ C)
verallgemeinerte Eigenvektoren von 1j ∂x sind (Siehe Beispiel 4.7):
1
∂x ξλ (x) = λξλ (x) .
j
Sie sind alle uneigentlich; eigentliche Eigenvektoren gibt es keine. Da all diese Eigenvektoren dasselbe Konvergenz- und Wachstumsverhalten aufweisen, nehmen wir an,
daß sie alle benötigt werden. Nach den im letzten Abschnitt angeführten Kriterien
führt uns dies zur Annahme µ = µℓ (Lebesgue-Maß). Die Normierungsfaktoren kλ
bleiben vorläufig noch unbestimmt; wir setzen aber k lambda ∈]0, ∞[ voraus, da ein
eventueller Phasenfaktor willkürlich ist. Außerdem versuchen wir den Ansatz kλ = k
(d. h. kλ unabhängig von λ).
105
4.2. DIE VERALLGEMEINERTEN EIGENVEKTOREN
Da T längentreu sein soll, streben wir folgende Beziehung an:
Z
Z
2
|ϕ(λ)|
e
dλ = |ϕ(x)|2 dx,
ϕ(x) ∈ Φ.
(4.21)
Wenn wir T durch Entwicklung nach Eigenvektoren erhalten, dann gilt
Z
ϕ(λ)
e
= ξλ(x)ϕ(x) dx.
(4.22)
Hieraus ergibt sich:
Z
Z
Z Z
Z
2
|ϕ(λ)|
e
dλ =
ϕ(λ)
e ϕ(λ)
e
dλ =
ξλ(x) ϕ(x) dx
ξλ (x′ )ϕ(x′ ) dx′ dλ
λ
λ
= k2
= k
2
Z Z
Zλ
ϕ(x)
x
ϕ(x)
Z
Z
x′
x
′
ϕ(x′ ) ejλ(x−x ) dx′ dx dλ
x′
′
ϕ(x )
x′
x
λ
Z
′
ejλ(x−x ) dλ dx′ dx.
λ
Die letzte Integrationsvertauschung ist nicht erlaubt und das innerste Integral in
der letzten Zeile ist auch gar nicht definiert. Der so erhaltene Ausdruck zeigt aber
worauf man hinaus will: es soll die symbolische Beziehung
Z
′
2
k
ejλ(x−x ) = δ(x′ − x)
(4.23)
erfüllt sein. Denn wegen
Z
ϕ(x′ ) δ(x′ − x) dx′ = ϕ(x)
ergibt sich aus (4.23) das anzustrebende Ergebnis (4.21).
Um die — zunächst rein symbolische — Gleichung (4.23) zu präzisieren, nähern
′
′
wir ejλ(x−x ) durch ejλ(x−x ) χr (x) an, wobei
1 für |λ| ≤ r
χr (x) =
,
r = 1, 2, 3, . . . .
0 für |λ| > r
Man hat dann:
Z
2
|ϕ(λ)|
e
dλ = lim k 2
Z
r→∞
Z
ϕ(x)
Z
′
ϕ(x′ ) ejλ(x−x ) dx′ dx dλ.
x′
λ∈[−r,r] x
Jetzt kann man vertauschen (Fubini-Theorem) und erhält somit
k 2 lim
r→∞
Z
x
ϕ(x)
Z
x′
|
ϕ(x′ )
zZ
2r si(r(x′ −x))
}|
jλ(x−x′ )
e
λ∈[−r,r]
{z
fr(x)
{
dλ dx′ dx,
}
(mit si y :=
sin y
).
y
106
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Man zeigt leicht, daß lim fr (x) = 2πϕ(x). Mit Hilfe der Bedingung ϕ(x) ∈ S(R)
r→∞
läßt sich die gleichmäßige Konvergenz der Funktionenfolge fr (x) zeigen; die Grenzwertbildung darf dann mit der Integration vertauscht werden und man erhält
Z
Z
2
2
lim k
ϕ(x)fr (x) dx = 2πk
ϕ(x)ϕ(x) dx = 2πk 2 kϕk2 .
r→∞
R
2
Mit k = √12π führt dies schließlich zu |ϕ(λ)|
e
dλ = kϕk2 ; die Längentreue der
durch (4.22) definierten Transformation ist dann erfüllt. Da sich auch die Surjektivität dieser Abbildung zeigen läßt, haben wir mit (4.22) tatsächlich die gesuchte
Spektraldarstellung gefunden (Bedingung 3 von Satz 4.3 muß nicht explizit nachgeprüft werden, da 1j ∂x auf S(R) e.s.a. ist).
Wir haben gesehen, daß beim Überprüfen der Längentreue die Beziehung
Z
ξλ (x′ )ξλ (x) dλ = δ(x′ − x)
zu verifizieren ist (Gleichung(4.23)). Die häufig zitierte ‘Orthonormierungsbedingung’
Z
ξλ′ (x)ξλ (x) dx = δ(λ − λ′ )
(4.24)
ist dagegen keine hinreichende Bedingung für die Längentreue von T . Diese Gleichung
führt letztlich nur auf
ϕ(λ)
e
= hξλ | ϕi,
was aber ohnedies per definitionem gilt. Und selbst dann, wenn man es schafft aus
(4.24) irgend eine Normierungsbedingung herauszulesen, so hat man immer noch
nicht die Längentreue bewiesen: denn selbst bei korrekter Normierung kann es sein,
daß man zu wenige, zu viele oder die falschen Eigenvektoren ausgewählt hat.
4.2.5
Die inverse Transformation
Sei
T : L2 RJ , σ
−→ L2 RI , µ
f (x) 7−→ fe(λ)
eine unitäre Transformation, die durch die Entwicklung
Z
ϕ(λ)
e
= ξλ (x)ϕ(x) dσ(x) ,
ϕ(x) ∈ Φ ⊆ L2 RJ , σ
gegeben ist (Φ dicht in L2 RJ , σ ). Von den ξλ (x) setzen wir hier voraus, daß es sich
um wohldefinierte (bezüglich x und λ meßbare) Funktionen handelt, die folgende
Bedingung erfüllen:
Z Z e
e
e = T Φ.
ϕ(x) ∈ Φ, ψ(λ)
∈Φ
ξλ (x) ϕ(x) ψ(λ) dσ(x) dµ(λ) < ∞,
−1
(4.25)
i. allg. folgende Gestalt
Unter dieser Bedingung hat die Umkehrtransformation T
Z
ϕ(x) = ηx (λ)ϕ(λ)
e
dµ(λ) mit ηx (λ) = ξλ (x).
4.2. DIE VERALLGEMEINERTEN EIGENVEKTOREN
107
Begründung: Sei
ϕ(x)
b
:=
Z
ηx (λ)ϕ(λ)
e
dµ(λ) ,
ϕ(λ)
e
= T ϕ(x) , ϕ(x) ∈ Φ.
Wegen (4.25) ergibt sich mit Hilfe des Fubini-Theorems (siehe z. B. [35]):
Z
Z Z
ϕ(x)ψ(x)
b
dσ(x) =
ξλ (x)ϕ(λ)
e dµ(λ) ψ(x) dσ(x)
Z
Z
=
ϕ(λ)
e
ξλ (x)ψ(x) dσ(x) dµ(λ)
Z
Z
e
=
ϕ(λ)
e ψ(λ) dµ(λ) = ϕ(x)ψ(x) dσ(x) .
Man hat somit
Z
Z
ϕ(x)ψ(x)
b
dσ(x) = ϕ(x)ψ(x) dσ(x)
für alle ψ(x) ∈ Φ;
in vielen Fällen läßt sich zeigen, daß hieraus
folgt.
= ϕ(x) a.e.
ϕ(x)
b
Beispiel 4.11 Wir betrachten wieder das Beispiel des letzten Abschnittes:
Z
1
ϕ(λ)
e
=√
e−jλx ϕ(x) dx
(Fourier-Transformation).
2π
Unter Anwendung der soeben beschriebenen Methode erhält man
Z
1
ϕ(x) = √
e+jλx ϕ(λ)
e
dλ
(inverse Fourier-Transformation).
2π
Der oben geschilderte Zusammenhang kann auch von Nutzen sein, wenn es darum
geht, auf heuristischem Wege abzuschätzen, ob man alle benötigten Eigenvektoren
gefunden hat: Die Gleichung
Z
ϕ(x) = ξλ (x) ϕ(λ)
e
dµ(λ)
besagt, daß ϕ(x) als ‘Linearkombination’ der Funktionen ξλ (x) dargestellt werden
kann (D. h. man faßt obiges Integral als eine unendliche Linearkombination der ξλ (x)
auf, die jeweils mit den Zahlen ϕ(λ)
e
gewichtet sind). Man kann dann sagen, daß ein
System {ξλ } von Eigenfunktionen genau dann vollständig ist, wenn es möglich ist,
über ‘Linearkombinationen’ der ξλ (x) alle ϕ(x) ∈ Φ zu erzeugen.
4.2.6
Unvollständige Observablen-Sätze
Hat man einen unvollständigen Satz {Ai }i∈J kommutierender s.a. Operatoren, so
kann es für diesen zwar keine Spektraldarstellung geben, aber immerhin eine diagonalisierende Darstellung
T : E −→ L2 RI , µ
f 7−→ f (λ) .
108
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Die Unvollständigkeit von {Ai }i∈J drückt sich in der Beziehung
J ⊂I
aus; in L2 RI , µ gibt es demnach neben den {λi }i∈J noch weitere v-Operatoren.
Bei der Konstruktion der Abbildung T hat man die Eigenwert-Gleichungen
Ai ξλ = λi ξλ
nur für i ∈ J zu lösen. Die Lösungen ξλ haben aber nach wie vor einen Parameter
λ ∈ I, wobei jedoch die λi mit i ∈ I \ J nicht als Eigenwerte, sondern als abstrakte Parameter aufgefaßt werden. Genaugenommen sind aber auch diese abstrakten
Parameter Eigenwerte, und zwar für die Operatoren {T −1 λi T }i∈I\J .
4.2.7
Ermittlung des Spektrums einer Observablen
Gegeben sei ein s.a. Operator A im Hilbertraum E; gesucht sei das Spektrum spec A
dieses Operators. Die Bestimmung von spec A kann im Prinzip natürlich mit den
Methoden aus Abschnitt 3.1 erfolgen (z. B. mittels Weyl-Kriterium). In der Praxis
ist es aber oft günstiger das Spektrum über die Eigenwertgleichung zu ermitteln. Ist
Φ ein Roberts-Raum für A, so hat man die Gleichung
Aξλ = λξλ ,
ξλ ∈ Φ∗ , λ ∈ R
(4.26)
zu lösen. Interessiert ist man nicht an ξλ , sondern nur an den Eigenwerten λ, die
diese Gleichung lösen. Ist K(A) ⊆ R die Menge aller verallgemeinerten Eigenwerte
(also die Menge aller λ ∈ R, die (4.26) erfüllen), so ist
spec A ⊆ K(A)
(4.27)
(Mit K(A) als Abschließung von K(A))13 . Um an Stelle der Teilmengen-Relation
(4.27) die Gleichheit spec A = K(A) zu erhalten, dürfte man nur jene Eigenwerte in
K(A) aufnehmen, die zu einem Eigenvektor gehören, der in die Entwicklung nach
Eigenvektoren (Satz 4.2) eingeht.
4.2.8
Physikalische Interpretation der Eigenvektoren
Ist ξ ein eigentlicher Eigenvektor des s.a. Operators A, also
Aξ = λξ,
ξ ∈ DA ,
13
Beweis: Sei A
1 = A und {A1 , A2 } ein vollständiger Satz kommutierender s.a. Operatoren.
T : E → L2 R2 , µ sei eine Spektraldarstellung für {A1 , A2 }. Nach Seite 103 gibt es eine Menge
F ⊆ R2 multipler Eigenwerte, sodaß F = supp µ ist. Offenbar gilt π1 (F ) ⊆ K(A) und somit
π1 (F ) ⊆ K(A). Weiters läßt sich leicht zeigen, daß π1 F = π1 (F ) ist. Man hat dann
QED.
spec A = π1 F = π1 (F ) ⊆ K(A).
109
4.3. DIE TOPOLOGIE VON Φ
so kann ξ sehr leicht physikalisch interpretiert werden: ist das System im Zustand ξ,
so würde eine Messung der Observablen A mit Sicherheit den Meßwert λ liefern (Siehe Satz 2.11, Seite 72). Die uneigentlichen Eigenvektoren liegen in Φ∗ \IH und können
daher nicht als physikalisch realisierbare Zustände interpretiert werden. Ein uneigentlicher Eigenvektor kann aber häufig als idealisierter Grenzzustand einer Folge δk
echter Zustände aufgefaßt werden. In einer Spektraldarstellung für A entsprechen
den δk Funktionen δk (λ), wie sie in Abbildung 4.1, Seite 95, angedeutet werden; die
Unschärfe der δk nimmt mit wachsendem k ab, sodaß sie beim idealisierte Grenzzustand schließlich 0 ist. Diese Veranschaulichung der uneigentlichen Eigenvektoren
ist zwar sehr nützlich, bleibt aber dennoch ein rein heuristisches Konzept, das nie
ganz frei von Schwierigkeiten ist (So führt z. B. die Annahme einer verschwindenden
Impulsunschärfe zu einen unendlichen Ortsunschärfe).
Ist ξ(x) eine verallgemeinerte Funktion, die einen uneigentlichen Eigenvektor
darstellt, so kann man |ξ(x)|2 unter Umständen als eine Art Wahrscheinlichkeitsdichte auffassen, wie man dies von eigentlichen Zuständen her gewöhnt ist. Da jedoch
die uneigentliche Eigenvektoren nicht normierbar sind (Die Forderung kξk = 1 ist
nur dann sinnvoll, wenn ξ ein Hilbertraum-Vektor ist), stellt |ξ(x)|2 keine absolute
Wahrscheinlichkeitsdichte dar, sondern bestenfalls eine relative Verteilung, die mehr
zu Zwecken der Anschauung dient, als für eine exakte rechnerische Verwendung.
4.3
Die Topologie von Φ
Der Raum Φ∗ soll natürlich alle Eigenvektoren beinhalten, die für eine Entwicklung
nach Satz 4.2 benötigt werden. Andererseits sollte Φ∗ aber möglichst keine weitere
(unbenötigten) Eigenvektoren beinhalten; man ist deshalb daran interessiert, Φ∗
geeignet einzuschränken. Eine solche Einschränkung erhält man, wenn man an Stelle
des algebraisch dualen Raums Φ∗ den sogenannten topologisch dualen Raum Φ′
wählt. Φ′ ist kleiner als Φ∗ und es gilt somit
Φ ⊆ E ⊆ Φ′ ⊆ Φ∗
(E sei der Hilbertraum).
Φ′ beinhaltet nur jene Elemente aus Φ∗ , die Φ-stetig sind. Da es mehrere Möglichkeiten gibt, die Φ-Stetigkeit zu definieren, gibt es auch mehrere Möglichkeiten Φ′ zu
bilden. Wir werden eine sehr scharfe Form der Φ-Stetigkeit angeben, die auf Roberts zurückgeht (Siehe [37], [38]). Diese scharfe Stetigkeits-Bedingung führt zu
einem kleinen Raum Φ′ — dem kleinsten Φ′ , das im Rahmen der Theorie des Gelfandschen Raumtripels (bei gegebenem Φ) möglich ist. Wir werden die von Roberts
angegebene Φ-Stetigkeit in einer Form beschreiben, die sich unmittelbar praktisch
anwenden läßt und keine weiteren mathematischen Kenntnisse voraussetzt. In den
Abschnitten 4.3.2 bis 4.3.4 werden wir dann näher auf die zugrundeliegenden mathematischen Verhältnisse eingehen; der nur an praktischen Anwendungen interessierte
Leser kann diese Abschnitte überspringen.
110
4.3.1
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Der Raum Φ′R
Definition 4.9 Sei Φ ein durch die Roberts-Basis {Bk }k∈K vermittelter RobertsRaum. Ein ξ ∈ Φ∗ nennen wir Φ-stetig im Sinne von Roberts, wenn gilt: es gibt
eine endliche Teilmenge {N1 , N2 , . . . , Np } ⊆ Prod0 {Bk }k∈K und ein C > 0, sodaß
∀ϕ ∈ Φ : |hξ | ϕi| ≤ C · (kN1 ϕk + kN2 ϕk + . . . + kNp ϕk) .
(4.28)
Mit Φ′R bezeichnen wir die Menge aller ξ ∈ Φ∗ , die diese Bedingung erfüllen. Φ′R
ist somit die Menge der linear-stetigen Funktionale über Φ (‘stetig’ im Sinne von
Roberts).
Satz 4.4 Sei {Ai }i∈J ein Satz kommutierender s.a. Operatoren, und Φ sei ein
Roberts-Raum für {Ai }i∈J (vermittelt durch eine Roberts-Basis {Bk }k∈K ). In Φ′R
gibt es dann alle Eigenvektoren, die für die Entwicklung einer diagonalisierenden
Darstellung benötigt werden.
4.3.2
Der Begriff der Topologie
14
Bisher haben wir, wenn es um Konvergenzbegriffe ging, immer von Folgen gesprochen. In manchen Räumen reicht aber der Folgen-Begriff nicht aus, um exakt festzulegen, was man unter Konvergenz versteht. Wir werden daher sogenannte Netze
einführen, die in zweifacher Hinsicht eine Verallgemeinerung des Folgen-Begriffes
darstellen: Netze können überabzählbar viele Glieder haben, und die Glieder von
Netzen sind nicht so streng geordnet, wie man dies von den Gliedern einer Folge
normalerweise fordert.
Definition 4.10 Sei K eine Indexmenge in der eine Ordnungsrelation definiert
ist, die folgende Eigenschaften hat:
i) ∀α ∈ K : α α
(Reflexivität)
ii) ∀α, β ∈ K : (α β und β α) =⇒ (α = β)
iii) ∀α, β, γ ∈ K : (α β und β γ) =⇒ (α γ)
(Antisymmetrie)
(Transitivität)
iv) ∀α, β ∈ K : ∃γ ∈ K : (γ α und γ β).
Eine Abbildung K → E nennen wir ein Netz in E und schreiben hierfür (fk )k∈K
(Hierbei ist E eine beliebige Menge).
Eine Folge (fk )k=1,2,3,... ist ein spezielles Netz, bei dem K = N ist (also K abzählbar)
und die Ordnungsrelation der Relation ≥ entspricht. Die Relation ≥ erfüllt offensichtlich alle Bedingungen aus Definition 4.10, hat aber die zusätzliche Eigenschaft,
daß für alle α, β ∈ N entweder α ≥ β oder β ≥ α ist.
14
Die Abschnitte 4.3.2 bis 4.3.4 enthalten eine Beschreibung des mathematischen Hintergrundes
von Abschnitt 4.3.1. Sie können unter Umständen auch übersprungen werden.
111
4.3. DIE TOPOLOGIE VON Φ
Ein Netz (ak )k∈K in R (oder C) konvergiert per definitionem genau dann gegen
ein a ∈ R (oder a ∈ C), wenn
∀ǫ > 0 : ∃N ∈ K : k N ⇒ |ak − a| < ǫ.
Ein Netz (fk )k∈K in einem allgemeinen Hilbertraum E konvergiert genau dann gegen
ein f ∈ E, wenn
∀ǫ > 0 : ∃N ∈ K : k N ⇒ kfk − f k < ǫ.
Es gibt aber auch Räume mit wesentlich komplizierteren Konvergenzbegriffen; viele
von diesen lassen sich in folgende Definition einordnen:
Definition 4.11 E sei ein Vektorraum. Eine Funktion ⌊·⌋ : E → [0, ∞[ wird Seminorm genannt, wenn
i) ⌊f + g⌋ ≤ ⌊f ⌋ + ⌊g⌋ ,
ii) ⌊αf ⌋ = |α| ⌊f ⌋ ,
für f, g ∈ E
für f ∈ E, α ∈ C
(Dreiecksungleichung)
(Homogenität).
Eine Familie { ⌊·⌋ }β∈B von Seminormen definiert auf folgende Weise einen Konvergenzbegriff in E: ein Netz (fk )k∈K in E konvergiert genau dann gegen ein f ∈ E,
wenn
∀ǫ > 0 : ∃N ∈ K : k N ⇒ ∀β ∈ B : ⌊fk − f ⌋β < ǫ .
Ein Vektorraum, der mit einem solchen Konvergenzbegriff versehen ist, heißt lokal
konvexer Raum.
Jeder Hilbertraum ist offenbar auch ein lokal konvexer Raum: die entsprechende
Familie von Seminormen hat nur ein einziges Element, nämlich die HilbertraumNorm aus Definition 1.13 (In diesem Sinne sind auch R und C lokal konvexe Räume).
RI ist ebenfalls ein lokal konvexer Raum: für jedes i ∈ I hat man eine Seminorm
⌊λ⌋i = |πi (λ)| ;
ein Netz (λ(k) )k∈K in RI konvergiert genau dann gegen λ ∈ RI , wenn für alle i ∈ I
πi(λ(k) ) gegen πi (λ) konvergiert15 .
Hat man in einem Raum E einen Konvergenzbegriff eingeführt, so kann man offene
und abgeschlossene Mengen definieren:
• Eine Menge C ⊆ E ist abgeschlossen, wenn alle Häufungspunkte von C wieder
in C liegen (D. h.: wenn ein Netz in C gegen ein f ∈ E konvergiert, so ist f ∈ C).
Ferner ist per definitionem auch die leere Menge abgeschlossen.
• Eine Menge Ω ⊆ E ist offen, wenn E \ Ω abgeschlossen ist.
15
Bei endlichem I kann dieser Konvergenzbegriff auch durch eine einzige Seminorm
X
⌊λ⌋ :=
⌊λ⌋i
i∈I
definiert werden.
112
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
(In RI ergeben sich mit obiger Definition genau die auf Seite 75 beschriebenen offenen
Mengen).
In einigen Räumen erhält man die selben offenen und abgeschlossenen Mengen, wenn
man an Stelle des Netz-Begriffes nur den eingeschränkteren Folgen-Begriff verwendet. Dies gilt unter anderem in allen separablen Hilberträumen, insbesondere also in
R, C, Rn und Cn (In Definition 1.7 haben wir bei der Charakterisierung der offenen
und abgeschlossenen Mengen von Rn tatsächlich nur den Folgen-Begriff verwendet).
Die Gesamtheit aller offenen Mengen
τ = Ω ⊆ E Ω offen
nennt man Topologie von E, wenn gilt:
i) beliebige Vereinigungen offener Mengen sind wieder offen
ii) endliche Durchschnitte offener Mengen sind wieder offen
iii) E und ∅ sind offen.
Die Konvergenzbegriffe lokal konvexer Räume (und andere werden wir nicht betrachten) führen stets zu offenen Mengen, die eine Topologie bilden. Doch auch umgekehrt
definiert jede Topologie einen Konvergenzbegriff: ein Netz (fk )k∈K konvergiert genau
dann gegen f , wenn für alle offenen Ω mit f ∈ Ω ein N ∈ K existiert, sodaß für alle
k N stets fk ∈ Ω ist. Man kann einen Konvergenzbegriff somit auch dadurch definieren, daß man festlegt, welche Mengen man als offen bezeichnet. In diesem Sinne
sind die Begriffe Topologie und Konvergenzbegriff äquivalent.
Für weitere Ausführungen zu diesem Thema siehe z. B. Reed/Simon [35], Kapitel IV.
Ein Raum in dem eine Topologie (=Konvergenzbegriff) definiert ist, wird topologischer Raum genannt. In ein- und demselben Raum können natürlich auch mehrere
Konvergenzbegriffe definiert sein; man verwendet dann:
Definition 4.12 Sei E ein Raum, in dem zwei verschiedene Topologien (=Konvergenzbegriffe) τ1 und τ2 definiert sind. Gilt für alle Netze (fk )k∈K die Beziehung
τ1
τ2
fk −→
f =⇒ fk −→
f ,
so sagt man die Topologie τ1 ist stärker als τ2 (bzw. τ2 ist schwächer als τ1 )
4.3.3
16
.
Die Φ-Stetigkeit
Definition 4.13 Seien E1 und E2 zwei topologische Räume. Eine Abbildung
A : E1 −→ E2
f 7−→ Af
wird stetig genannt, wenn für jedes Netz (fk )k∈K in E1 gilt: konvergiert fk gegen f ,
so konvergiert Afk gegen Af . Symbolisch:
E1
E2
fk −→
f =⇒ Afk −→
Af .
16
An Stelle von stärker und schwächer verwendet man auch die Bezeichnungen feiner und gröber.
Das ist so zu verstehen, daß eine starke Topologie mehr offene Mengen hat und in diesem Sinne
‘feiner’ ist.
113
4.3. DIE TOPOLOGIE VON Φ
In vielen Fällen kann in obiger Definition der Begriff Netz durch den Begriff Folge
ersetzt werden, denn es gilt:
Satz 4.5 Ist E1 ein lokal konvexer Raum, mit höchstens abzählbar vielen Seminormen, so bleibt Definition 4.13 unverändert, wenn man den Begriff ‘Netz’ durch den
Begriff ‘Folge’ ersetzt.
Beweis: Bei höchstens abzählbar vielen Seminormen ist E1 ein metrischer Raum
(Siehe z. B. [35], Theorem V.5). Für metrische Räume kann die Abschließung B einer
Menge B ⊂ E1 über Folgen konstruiert werden (Siehe z. B. [35], Seite 96). Für jedes
f ∈ B gibt es dann eine Folge (fk )k=1,2,3,... in B, die gegen f konvergiert. Wenn nun
E
E
1
2
aus fk −→
f stets Afk −→
Af folgt, so liegt Af in der Abschließung AB von AB,
und folglich ist AB ⊆ AB. Nach [26], Seite 323 ist dann A stetig. QED.
Gelegentlich ist auch folgender Satz von Nutzen:
Satz 4.6 Seien E1 und E2 zwei lokal konvexe Räume. Eine lineare Abbildung
A : E1 → E2 ist genau dann stetig, wenn sie in Null stetig ist, wenn also gilt:
E1
E2
fk −→
OE1 =⇒ Afk −→
OE2
(OE1 sei der Nullvektor in E1 , und OE2 der Nullvektor in E2 ).
Führt man in Φ eine Topologie ein, so kann man Definition 4.13 anwenden, indem
man E1 = Φ setzt, und dadurch die Φ-Stetigkeit definiert. Für E2 setzen wir hierbei
3 verschiedene Räume ein:
• Ein linearer Operator A : Φ → Φ ist Φ-stetig, wenn
Φ
Φ
ϕk −→ ϕ =⇒ Aϕk −→ Aϕ .
• Sei Φ ⊆ E; E ein Hilbertraum. Die Einbettung
I : Φ −→ E
ϕ 7−→ ϕ
ist Φ-stetig, wenn
Φ
E
ϕk −→ ϕ =⇒ ϕk −→ ϕ .
Die Φ-Topologie ist dann stärker als die Hilbertraum-Topologie.
• Ein lineares Funktional
ξ : Φ −→ C
ϕ 7−→ hξ | ϕi
ist Φ-stetig, wenn
ϕk −→ ϕ =⇒ hξ | ϕk i → hξ | ϕi .
Φ
114
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Für den zuletzt genannten Fall geben wir noch einen Satz an:
Satz 4.7 Sei Φ ein lokal konvexer Raum mit den Seminormen { ⌊·⌋β }β∈B . Ein lineares Funktional
ξ : Φ −→ C
ϕ 7−→ hξ | ϕi
ist genau dann stetig, wenn es β1 , β1 , . . . βp ∈ B und ein C > 0 gibt, sodaß
∀ϕ ∈ Φ : |hξ | ϕi| ≤ C · ⌊ϕ⌋β1 + ⌊ϕ⌋β2 + . . . + ⌊ϕ⌋βp .
(Siehe z. B. [35], Theorem V.2).
Definition 4.14 Sei Φ ein linear konvexer Raum. Mit Φ′ bezeichnen wir die Menge
aller linearen Funktionale
ξ : Φ −→ C
ϕ 7−→ hξ | ϕi
die Φ-stetig sind. Φ′ heißt topologisch dualer Raum von Φ.
4.3.4
Bedingungen für die Existenz einer Entwicklung nach
Eigenvektoren
In diesem Abschnitt werden wir angeben, wie man die Topologie von Φ wählen muß,
damit sichergestellt ist, daß Φ′ alle benötigten Eigenvektoren enthält.
Satz 4.8 (Gelfand/Maurin) Sei {Ai }i∈J ein Satz kommutierender s.a. Operatoren im (separablen) Hilbertraum E, und Φ sei ein dichter invarianter Teilraum. In
Φ sei eine Topologie definiert, für die gilt:
i) Die Topologie von Φ ist stärker als die Hilbertraum-Topologie.
ii) Die Abbildungen Ai : Φ → Φ sind Φ-stetig.
iii) Die Topologie von Φ ist nuklear.
Dann gibt es in Φ′ alle Eigenvektoren, die für die Entwicklung einer diagonalisierenden Darstellung benötigt werden.
Einen Beweis dieses Satzes findet man in Maurin [26], Seite 83, Theorem 5. Der dort
formulierte Satz unterscheidet sich geringfügig von unserem, da Maurin an Stelle der
diagonalisierenden Darstellung den Begriff des Direct Integral verwendet. Der bei
Maurin angeführte Beweis läßt sich aber fast wörtlich auf unseren Satz anwenden.
115
4.3. DIE TOPOLOGIE VON Φ
Vom praktischen Standpunkt aus gesehen ist dieser Satz recht unhandlich, da er die
Forderung nach einer nuklearen Topologie enthält. Der Begriff der Nuklearität
ist aber eher kompliziert und soll hier auch nicht näher erläutert werden17 . Die
Nuklearität von Φ kann aber mit Hilfe des folgenden Satzes erreicht werden:
Satz 4.9 (Roberts [37],[38]) Sei {Ai }i∈J ein Satz s.a. Operatoren im separablen
Hilbertraum E. Φ ⊆ E sei ein durch die Roberts-Basis {Bk }k∈K vermittelter RobertsRaum. Jedes N ∈ Prod0 {Bk }k∈K definiert eine Seminorm
p
⌊ϕ⌋N = kNϕk = hNϕ | Nϕi.
Die durch diese Seminormen definierte lokal konvexe Topologie hat folgende Eigenschaften:
a) Die Topologie ist nuklear.
b) Es ist die schwächste Topologie, für die gilt:
– sie ist stärker als die Hilbertraum-Topologie
– alle Ai sind Φ-stetig.
c) Φ ist vollständig (bezüglich Netz-Konvergenz) und semireflexiv.
d) Ist {Bk }k∈K endlich oder abzählbar, so ist Φ ein reflexiver Fréchet-Raum.
Diese Topologie nennen wir Roberts-Topologie; den entsprechenden (topologisch)
dualen Raum bezeichnen wir mit Φ′R.
Mit Hilfe von Satz 4.7 sieht man sofort, daß die soeben gegebene Charakterisierung
von Φ′R äquivalent zu jener von Definition 4.9 ist.
Die Punkte c) und d) haben wir nur der Vollständigkeit halber angegeben, und
werden nicht näher auf sie eingehen. Die Punkte a) und b) benötigen wir aber, um
Satz 4.8 anwenden zu können. Die Kombination der beiden letzten Sätze ergibt dann
Satz 4.4.
In Roberts [37],[38] wurde die in obigem Satz eingeführte Topologie etwas anders
definiert: an Stelle von N ∈ Prod0 {Bk }k∈K wurde N ∈ Alg0 {Bk }k∈K zugelassen.
Wir zeigen nun die Äquivalenz der beiden Definitionen:
Jedes M ∈ Alg0 {Bk }k∈K ist in der Form
M=
p
X
γr Nr ,
r=1
Nr ∈ Prod0 {Bk }k∈K
γr ∈ C
darstellbar. Folglich gilt für alle ϕ ∈ Φ:
kM ϕk ≤ C
p
X
r=1
kNr ϕk ,
mit
C = max |γr | .
r=1,...,p
Die Behauptung folgt dann aus [35], Seite 126, erste proposition, Punkt (c). QED.
17
Eine ausführliche Behandlung des Nuklearitätsbegriffes findet man z. B. in Pietsch [32],
Treves [42], Schaefer [39].
116
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Für theoretische Überlegungen kann es von Bedeutung sein, ob grundsätzlich für
alle Sätze {Ai }i∈J kommutierender s.a. Operatoren eine Entwicklung nach Eigenvektoren möglich ist. Für endliches oder abzählbares I kann dies auf jeden Fall
bejaht werden: es gibt dann nämlich immer einen nuklearen Raum Φ, der alle
Bedingungen aus Satz 4.8 erfüllt18 . Für den Fall überabzählbar vieler Ai ist mir
kein entsprechender Existenz-Beweis bekannt; dieser Fall kann aber bei Einhaltung einer physikalisch motivierbaren Minimalitätsbedingung nie auftreten (Siehe
Lozada/Sarrazin/Torres [24] 1992).
4.4
4.4.1
Beispiel: Das Wasserstoffatom
Modell und Aufgabenstellung
Das Wasserstoffatom kann (bei Abwesenheit von äußeren Feldern) in guter Näherung durch ein spinloses Teilchen modelliert werden, das sich in einem elektrischen
Potential
q2
Υ(x, y, z) = Υ(x) =
4π |x|
befindet (q ≈ 1.6 · 10−19 C). Die Masse M dieses Teilchens ist
me mp
M=
≈ me
me + mp
(mp =Masse des Protons, me =Masse des Elektrons, M=reduzierte Masse des Elektrons). Der geringfügige Unterschied zwischen M und me entsteht durch die Endlichkeit der Protonenmasse, die dazu führt, daß das Proton nicht völlig unbeweglich
ist (Siehe z. B. [29], Seite 323). Nach Abschnitt 2.5.1 führt dies (in der SchrödingerDarstellung) zu folgendem Hamilton-Operator:
H=
−1
△ + V (|x|) ,
2M
mit
V (|x|) =
−q 2
4π |x|
−1
(Genaugenommen ist H die s.a. Erweiterung von 2M
△ + V (|x|)).
Zusätzlich zu H betrachten wir auch die Operatoren L2 und Lz aus Beispiel
4.2 (Seite 90). Nach de Dormale/Gautrin [12] ist {H, L2 , Lz } ein vollständiger
Satz kommutierender Observablen. Es gibt somit eine entsprechende Spektraldarstellung und wir werden im Folgenden versuchen, diese mit Hilfe der Eigenvektoren
zu ermitteln. Wir suchen also nach verallgemeinerten Funktionen, die folgende Eigenwertgleichungen erfüllen:
HξE,η,m(x) = EξE,η,m(x)
L2 ξE,η,m(x) = ηξE,η,m(x)
Lz ξE,η,m(x) = mξE,η,m (x)
18
Dies folgt aus der Kombination von de Dormale/Gautrin [11]1975, proposition 3, und
Maurin [26]1968, Seite 85, Theorem 6. In [11] wird gezeigt, daß es bei höchstens abzählbarem
I immer einen dichten invarianten Teilraum gibt; in [26] wird gezeigt, daß dieser Teilraum einen
geeigneten nuklearen Raum enthält.
117
4.4. BEISPIEL: DAS WASSERSTOFFATOM
4.4.2
Transformation auf Kugelkoordinaten
Wir führen folgende Transformation durch
x = r sin ϑ cos φ
y = r sin ϑ sin φ
z = r cos ϑ
r ∈ [0, ∞[,
φ ∈ [−π, π[,
ϑ ∈ [0, π].
Auf diese Weise können wir jede Funktion h(x, y, z) umkehrbar eindeutig in eine
Funktion b
h(r, φ, ϑ) überführen:
h(x, y, z) = h(r sin ϑ cos φ, r sin ϑ sin φ, r cos ϑ) = b
h(r, φ, ϑ) .
Nun läßt sich zeigen, daß für jede (absolut integrable19 ) Funktion h(x, y, z) gilt:
Z
h(x, y, z) dµℓ (x, y, z) =
Zπ Zπ Z∞
0 −π 0
b
h(r, φ, ϑ) r 2 sin ϑ dr dφ dϑ.
Man kann auch ein Maß µk auf R3 angeben, sodaß
Z
b
h(r, φ, ϑ) dµk (r, φ, ϑ) =
Zπ Zπ Z∞
0 −π 0
b
h(r, φ, ϑ) r 2 sin ϑ dr dφ dϑ.
Wir haben folglich eine unitäre Transformation
K : L2 R3 , µℓ −→ L2 R3 , µk
b φ, ϑ) .
ψ(x, y, z) 7−→ ψ(r,
Der Raum L2 (R3 , µk ) kann noch in die 2 Räume L2 (R, µr ) und L2 (R2 , µw ) ‘zerlegt’ werden. Die Maße µr und µk sind so definiert, daß
Z
Z
p(r) dµr (r) =
Z∞
p(p) r 2 dr
0
q(φ, ϑ) dµw (φ, ϑ) =
Zπ Zπ
q(φ, ϕ) sin ϑ dφ dϑ.
0 −π
Man sieht leicht, daß für beliebige f (r) ∈ L2 (R, µr ) , g(φ, ϑ) ∈ L2 (R2 , µw ) stets
f (r) · g(φ, ϑ) ∈ L2 (R3 , µk ) ist. Darüber hinaus läßt sich sogar zeigen, daß jedes
b φ, ϑ) ∈ L2 (R3 , µk ) in der Form
ψ(r,
19
b φ, ϑ) =
ψ(r,
∞
X
ν=1
fν (r) gν (φ, ϑ)
mit fν ∈ L2 (R, µr ) , gν ∈ L2 R2 , µw
Eine meßbare Funktion h(x) ist absolut integrabel (bezüglich µℓ ), wenn
R
|h(x)| dµℓ (x) < ∞.
118
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
dargestellt werden kann (Das heißt, die Menge der Linearkombinationen der
f (r) · g(φ, ϑ) ∈ L2 (R3 , µk ) ist dicht in L2 (R3 , µk )).
b
Zu jedem Operator A in L2 (R3 , µℓ ) gibt es einen unitäräquivalenten Operator A
3
in L2 (R , µk ). Insbesondere gilt:
1 ∂
∂
1 ∂2
c
2
L = −
sin ϑ
−
sin ϑ ∂ϑ
∂ϑ sin2 ϑ ∂φ2
cz = 1 ∂
L
j ∂φ
2
c2 .
b = − 1 1 ∂ r + V (r) + 1 L
H
2M r ∂r 2
2Mr 2
4.4.3
Die Kugelfunktionen
c2 und L
cz können offensichtlich auch als Operatoren in L2 (R2 , µw )
Die Operatoren L
aufgefaßt werden. Die sogenannten Kugelfunktionen
Yℓ,m (φ, ϑ) ∈ L2 R3 , µw ,
ℓ = 0, 1, 2, . . . ,
m = −ℓ, −ℓ + 1, . . . , ℓ
erfüllen die Gleichungen
c2 Yℓ,m (φ, ϑ) = ℓ (ℓ + 1) Yℓ,m(φ, ϑ)
L
cz Yℓ,m (φ, ϑ) = mYℓ,m (φ, ϑ)
L
(Siehe z. B. Messiah [29], Anhang B.4, insbesondere B.4.2). Ferner läßt sich zeigen,
daß die Yℓ,m ein vollständiges Orthonormalsystem in L2 (R2 , µw ) bilden.
Ist fE,ℓ (r) eine verallgemeinerte Funktion, die
1 1 ∂2
1
−
r + V (r) +
ℓ (ℓ + 1) fE,ℓ (r) = EfE,ℓ (r)
2M r ∂r 2
2Mr 2
(4.29)
erfüllt, so ist
fE,ℓ (r) Yℓ,m (φ, ϑ)
c2 , L
b L
cz (zu den Eigenwerten
offensichtlich eine Eigenfunktion der Operatoren H,
E, ℓ (ℓ + 1) , m). Man muß somit versuchen, die Gleichung (4.29) zu lösen.
4.4.4
Die Radialgleichung
Die Lösung der Gleichung (4.29) führt auf folgendes Ergebnis (Siehe Messiah [29],
Anhang B1):
119
4.4. BEISPIEL: DAS WASSERSTOFFATOM
Lösungen für E < 0:
Für die Werte
E = En = −
q4M
,
2 (4π)2 n2
n = ℓ + 1, ℓ + 2, ℓ + 3, . . .
gibt es Lösungen
fEn ,ℓ (r) ∈ L2 (R, µr ) .
Daneben gibt es weitere Lösungen, die aber außerhalb von L2 (R, µr ) liegen; diese
wachsen jedoch für r → ∞ so stark an, daß sie auf jeden Fall zu verwerfen sind.
Für E = 0 gibt es keine quadratintegrable Lösung (also keine, die in L2 (R, µr )
liegt). Da ein einzelner uneigentlicher Eigenwert uninteressant ist, müssen wir den
Fall E = 0 nicht weiter untersuchen.
Lösungen für E > 0:
Für E > 0 gibt es keine Lösungen aus von L2 (R, µr ). Außerhalb von L2 (R, µr ) findet
man aber für alle
E ∈ ]0, ∞[ und ℓ = 0, 1, 2, . . .
je 2 linear unabhängige Lösungen, die wir mit FE,ℓ (r) und GE,ℓ (r) bezeichnen wollen.
Diese Funktionen weisen folgendes asymptotisches Verhalten auf (Siehe Messiah
[29], Anhang B.1.5)20 :
αr → ∞ :
αr → 0 :
FE,ℓ(r) ≈ 1r sin(αr − γ ln 2αr + ǫγℓ )
1
r
GE,ℓ (r) ≈ cos(αr − γ ln 2αr + ǫγℓ )
)
für αr ≫ ℓ (ℓ + 1) + γ 2
FE,ℓ (r) ≈ cE,ℓ αℓ+1r ℓ
GE,ℓ (r) ≈
1
α−ℓ r −ℓ−1
(2ℓ+1)cE,ℓ
1
ℓπ,
2
√
Hierbei ist ǫγ,ℓ = arg Γ(ℓ + 1 + jγ) −
α = 2ME, γ =
√
1
geeigneten Maßsystem ist α = E und γ = √dE mit d ≈ 274
.
−q 2
4π
q
(4.30)
M
.
2E
In einem
Wegen der Vollständigkeit des Observablen-Satzes {H, L2 , Lz } kann es für jeden
multiplen Eigenwert (E, η, m) höchstens eine Eigenfunktion geben (η = ℓ (ℓ + 1));
somit muß die Hälfte der oben angeführten Lösungen verworfen werden. Wegen der
Divergenz von GE,ℓ (r) für r → 0 ist man natürlich versucht, die GE,ℓ (r) zu verwerfen;
da die Divergenz aber nicht besonders stark ist, erscheint diese Argumentation nicht
sehr zwingend.
20
Es ist FE,ℓ (r) =
(B.29) und (B.31).
1
r Fℓ (γ;
αr) , GE,ℓ (r) =
1
r Gℓ (γ;
αr), mit Fℓ und Gℓ aus [29], Gleichungen
120
4.4.5
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Analyse im Gelfandschen Raumtripel
Im vorliegenden Fall ist es naheliegend, eine genaue Analyse im Rahmen des Gelfandschen Raumtripels vorzunehmen, um zu prüfen, ob tatsächlich beide Lösungen
in Φ′R liegen. Einen für unser Problem geeigneten Roberts-Raum Φ haben wir bereits in Beispiel 4.2 (Seite 90) angegeben. Nun läßt sich aber leicht zeigen, daß
sowohl FE,ℓ(r) Yℓ,m (φ, ϑ) als auch GE,ℓ (r) Yℓ,m (φ, ϑ) in Φ′R liegen; das Gelfandsche
Raumtripel liefert im vorliegenden Fall somit kein Kriterium, das es gestattet die
richtigen Eigenfunktionen auszusuchen. Um dieses Problem zu lösen ist man daher
gezwungen, direkt die Bedingungen von Satz 4.3 zu prüfen. Es ist somit nicht ausreichend, die Eigenfunktionen einzeln zu betrachten, sondern es ist notwendig, die
Spektraldarstellung als ganze zu analysieren.
4.4.6
Die Struktur der Spektraldarstellung
Wir wissen, daß die Eigenfunktionen fE,ℓ (r) die folgende Gestalt haben:
fE,ℓ (r) = αE,ℓ FE,ℓ (r) + βE,ℓ GE,ℓ (r)
. Um die Zahlen αE,ℓ und βE,ℓ zu bestimmen, muß man direkt auf Satz 4.3 zurückgreifen. Wir werden das hier aber nicht explizit durchführen, sondern beschränken
uns darauf, anzugeben, welche Struktur die gesuchte Spektraldarstellung hat.
Wenn wir annehmen, daß wir die ‘richtigen’ Eigenfunktionen fE,ℓ (r) gefunden
haben (und diese korrekt normiert sind), so ergibt sich für die Spektraldarstellung
folgende Struktur:
T : L2 R3 , µℓ −→ L2 R3 , µ
ϕ(x, y, z) 7−→ ϕ(E,
e
ℓ, m) .
L2 (R3 , µℓ ) ist hier der Hilbertraum der Schrödinger-Darstellung, L2 (R3 , µ) ist jener
der Energiedarstellung. Eigentlich müßten wir T ϕ(x, y, z) = ϕ(E,
e
η, m) schreiben;
wegen η = ℓ (ℓ + 1) verwenden wir aber die Notation ϕ(E,
e
ℓ, m) (Der dem L2 entsprechende Operator in L2 (R3 , µ) ist aber nicht der Multiplikationsoperator ℓ, sondern
der Multiplikationsoperator ℓ (ℓ + 1)). Die Funktion ϕ(E,
e
ℓ, m) ergibt sich aus
D
E
ϕ(E,
e
ℓ, m) = fE,ℓ (r) Yℓ,m (φ, ϑ) ϕ(r,
b φ, ϑ) =
(4.31)
=
Z∞
=
Zπ Zπ
fE,ℓ (r)r
0
2
Zπ Zπ
0 −π
Yℓ,m(φ, ϑ)ϕ(r,
b φ, ϑ) sin ϑ dφ dϑ dr =
Yℓ,m (φ, ϑ) sin ϑ
0 −π
(Für ϕ ∈ Φ). Das Maß µ ist derart, daß
Z
|ϕ(E,
e
ℓ, m)|2 dµ(E, ℓ, m) =
Z∞
0
fE,ℓ (r)r 2 ϕ(r,
b φ, ϑ) dr dφ dϑ
121
4.4. BEISPIEL: DAS WASSERSTOFFATOM
=
∞ X
ℓ
X
ℓ=0 m=−ℓ
=
∞
X
n=ℓ+1
∞ X
n−1 X
ℓ
X
n=1 ℓ=0 m=−ℓ
|ϕ(E
e n , ℓ, m)|2 +
2
|ϕ(E
e n , ℓ, m)| +
Z∞
0
|ϕ(E,
e
ℓ, m)|2 dE
Z∞
∞ X
ℓ
X
ℓ=0 m=−ℓ 0
|ϕ(E,
e
ℓ, m)|2 dE.
Über Axiom 4 ergibt sich nun die physikalische Interpretation von ϕ(E,
e
ℓ, m).
4.4.7
Fazit
Wir haben gesehen, daß es uns im vorliegenden Beispiel nicht gelungen ist, über den
Formalismus des Gelfandschen Raumtripels, eine korrekte Auswahl unter den Eigenfunktionen zu treffen; um die gesuchte Spektraldarstellung zu erhalten müßten
wir direkt auf Satz 4.3 zurückgreifen. Der Nutzen des Gelfandschen Raumtripels
reduzierte sich hier darauf, einen sauberen theoretischen Rahmen zu liefern, der
es ermöglicht, das Wesen der verallgemeinerten Funktionen gut zu durchschauen.
Hierfür ist es aber ausreichend den Raum Φ∗ zu betrachten, der wesentlich einfacher ist, als der topologisch duale Raum Φ′ . Aus diesem Grund haben wir bei der
Beschreibung des Gelfandschen Raumtripels zunächst den Raum Φ∗ eingeführt; die
Konstruktion des komplizierteren Raumes Φ′ ist erst dann angebracht, wenn sich
daraus konkrete rechnerische Vorteile ergeben.
122
KAPITEL 4. ENTWICKLUNG NACH EIGENVEKTOREN
Literaturverzeichnis
[1] J. P. Antoine. Dirac Formalism and Symmetry Problems in Quantum Mechanics. I. General Formalism. Journal of Mathematical Physics, Vol. 10, No. 1,
p. 53, January 1969
[2] J. P. Antoine. Dirac Formalism and Symmetry Problems in Quantum Mechanics. II. Symmetry Problems. Journal of Mathematical Physics, Vol. 10, No. 12,
p. 2276, December 1969
[3] J. P. Antoine. Rigged Hilbert Spaces in Quantum Field Theory: a Lesson Drawn
from Charge Operators. Helvetica Physica Acta. Vol. 45, p.77, 1972
[4] Donald Babbitt. Rigged Hilbert Spaces and One-Particle Schrödinger Operators.
Reports on Mathematical Physics. Vol. 3, No. 1, p. 37, 1972
[5] N. N. Bogolubov, A. A. Logunov, I. T. Todorov. Introduction to Axiomatic
Quantum Field Theory. W. A. Benjamin, Inc., 1975
[6] Arno Bohm. The Rigged Hilbert Space and Quantum Theory. Lecture Notes in
Physics 78. Springer-Verlag, Berlin Heidelberg New York, 1978
[7] Arno Bohm. Quantum Mechanics: Foundations and Applications. SpringerVerlag, 1986
[8] A. Bohm, M. Gadella. Dirac Kets, Gamow Vectors and Gel’fand Triplets. Lecture Notes in Physics 348. Springer-Verlag, 1989
[9] P. A. M. Dirac. The Principles of Quantum Mechanics. Clarendon Press, Oxford, 1930
[10] Jaques Dixmier. Von Neumann Algebras. North Holland Publishing Company,
Amsterdam New York Oxford, 1981
[11] Bernard M. de Dormale and Henri-François Gautrin. Spectral representation
and decomposition of self-adjoint operators. Journal of Mathematical Physics,
Vol. 16, No. 11, p. 2328, November 1975
[12] Bernard M. de Dormale and Henri-François Gautrin. Equation radiale de
Schrödinger et complétude du système {H, L2 , Lz }. Can. J. Phys., Vol. 53,
p. 1528, 1975
123
124
LITERATURVERZEICHNIS
[13] S. J. L. van Eijndhoven, J. de Graaf. Trajectory Spaces, Generalized Functions and Unbounded Operators. Lecture Notes in Mathematics 1162, SpringerVerlag, 1985
[14] Herbert Federer. Geometric Measure Theory. Die Grundlagen der mathematischen Wissenschaften in Einzeldarstellungen, Band 153. Springer-Verlag, Berlin
Heidelberg New York, 1969
[15] David Fredricks. Tight Riggings for a Complete Set of Commuting Observables.
Rep. Math. Phys. (Poland), Vol. 8, No. 2, p. 277, October 1975
[16] M. Gadella. A rigged Hilbert space for the free radiation field. Journal of Mathematical Physics, Vol. 24, No. 4, April 1985
[17] I. M. Gelfand, N. J. Wilenkin. Verallgemeinerte Funktionen (Distributionen).
Band IV. VEB Deutscher Verlag der Wissenschaften, Berlin, 1964
[18] Siegfried Großmann. Funktionalanalysis. 4. Auflage, AULA-Verlag, Wiesbaden,
1988
[19] P. R. Halmos, V. S. Sunder. Bounded integral operators on L2 spaces. SpringerVerlag, Berlin[u.a.], 1978
[20] Ernst Henze. Einführung in die Maßtheorie. B·I· Hochschuhltaschenbücher
Band 505, Bibliographisches Institut, Mannheim, 1971
[21] J. M. Jauch and B. Misra. The Spectral Representation. Helvetica Physica Acta,
Vol. 38, p. 30, 1965
[22] Rainer J. Jelitto. Theoretische Physik 4: Quantenmechanik I. 2. Auflage, AULAVerlag, Wiesbaden, 1987
[23] Rainer J. Jelitto. Theoretische Physik 5: Quantenmechanik II. AULA-Verlag,
Wiesbaden, 1984
[24] A. Lozada, G. Sarrazin, P. L. Torres. Complete sets of commuting observables
and irreducible sets of observables. Helvetica Physica Acta, Vol. 65, p. 887, 1992
[25] Günther Ludwig. Einführung in die Grundlagen der Theoretischen Physik,
Band 3. Zweite Auflage, Vieweg, Braunschweig, 1984
[26] K. Maurin. General Eigenfunction Expansion and Unitary Representations of
Topological Groups. PWN - Polish Scientific Publishers, Warszawa, 1968
[27] Olaf Melsheimer. Rigged Hilbert space formalism as an extended mathematical
formalism for quantum systems. I. General theory. Journal of Mathematical
Physics, Vol. 15, No. 7, p. 902, July 1974
LITERATURVERZEICHNIS
125
[28] Olaf Melsheimer. Rigged Hilbert space formalism as an extended mathematical
formalism for quantum systems. II. Transformation theory in nonrelativistic
quantum mechanics. Journal of Mathematical Physics, Vol. 15, No. 7, p. 917,
July 1974
[29] Albert Messiah. Quantenmechanik, Band 1. Zweite Auflage, De Gruyter, Berlin
New York, 1991
[30] J. von Neumann. Mathematische Grundlagen der Quantentheorie. SpringerVerlag, Berlin, 1932
[31] J. von Neumann. Zur Algebra der Funktionaloperatoren und Theorie der normalen Operatoren. Mathematische Annalen 102, p. 370-427, Berlin, 1930
[32] A. Pietsch. Nuclear Locally Convex Spaces. Springer-Verlag, Berlin Heidelberg
New York, 1972
[33] E. Prugovečki. Can. J. Phys. 47, p. 1083, 1969
[34] E. Prugovečki. Quantum Mechanics in Hilbert Spaces. Academic Press, New
York and London, 1971
[35] M. Reed, B. Simon. Methods of Modern Mathematical Physics. I. Functional
Analysis. Revisited and Enlarged Edition, Academic Press, San Diego Boston
London Sydney Tokyo Toronto, 1980
[36] M. Reed, B. Simon. Methods of Modern Mathematical Physics. IV. Analysis of
Operators. Academic Press, New York, San Francisco, London, 1978
[37] J. E. Roberts. The Dirac Bra And Ket Formalism. Journal of Mathematical
Physics, Vol. 7, No. 6, p. 1097, June 1966
[38] J. E. Roberts. Rigged Hilbert Spaces in Quantum Mechanics. Comm. Math.
Phys. (Germany), 3, p. 98, 1966
[39] Helmut H. Schaefer. Topological Vector Spaces. The Macmillan Company, New
York, 1967
[40] Franz Schwabl. Quantenmechanik. Springer-Verlag, 1988
[41] D. Tjøstheim. A note on the unified Dirac- v. Neumann formulation of quantum
mechanics. Journal of Mathematical Physics, Vol. 16, No. 4, April 1975
[42] François Treves. Topological Vector Spaces, Distributions and Kernels. Academic Press, New York London, 1967
Stichwortverzeichnis
a.e., siehe almost everywhere
abgeschlossene Menge, 24, 111
abgeschlossener Operator, 35, 82
Abschliesung einer Menge, 24, 77
Abschliesung eines Operators, 82
absolut integrabel, 117
absolut stetiges Mas, 18
abstrakter Hilberraum, 46
abzahlbar, 17
adjungierter Operator, 34, 89, 97
almost everywhere, 19
Antoine, 10
aquivalente Funktionen, 19, 23
aquivalente Mase, 18
Assoziativgesetz, 22, 32
Babbitt, 10
beschrankte Menge, 24
beschrankter Operator, 33, 35, 39
bijektiv, 38
Bild einer Menge, 31
Bild eines Operators, 31
Bildbereich des Operators, 31
Bogolubov/Logunov/Todorov, 49
Bohm, 10, 56
Borel Mengen, 16
Bosonen, 55
Cauchy-Folge, 28
δ-Funktion, 91, 94
Darstellung, 38
Definitionsbereich des Operators, 31
Diagonaloperator, 39
dichter Teilraum, 28, 39, 88
Dimension des Hilbertraumes, 29
Dirac-Bild-Darstellung, 69
Diracsche δ-Funktion, siehe δ-Funktion
Diracsche Methode, 2, 7
Diracsche Notation, 30, 31, 37, 46
Direct Integral, 114
diskretes Spektrum, 80
Distributivgesetz, 32
de Dormale/Gautrin, 9, 42, 44, 82, 85, 90, 116
dualer Raum
algebraischer, 93, 109
topologischer, 10, 109, 114
e.s.a. Operator, 34, 60
ebene Welle, 54
Eigenfunktion, 36
Eigenvektor
eigentlicher, 35, 72, 103
gemeinsamer, 100
uneigentlicher, 99
verallgemeinerter, 7, 99, 100
Eigenwert
eigentlicher, 35, 72, 79
multipler, 100
uneigentlicher, 99
verallgemeinerter, 79, 99, 100
van Eijndhoven, 10
Einbettung, 113
einfache Mesapparatur, siehe Mesapparatur
eingeschranktes Lebesgue-Mas, 18, 25, 104
Einschieben der Eins, 30
Einschrankung eines Operators, 31
elementare offene Menge, 75
Energie-Observable, 62
Energiedarstellung, 8, 120
entarteter Eigenwert, 36
Entartungsgrad, 36, 80
Entwicklung nach Eigenvektoren, 100
Erhaltungsgrose, 67
Erwartungswert, 71
Erweiterung eines Operators, 31, 33, 34, 60
explizit zeitabhangige Observable, 62, 66
fast uberall, siehe almost everywhere
Federer, 76
feinere Topologie, 112
Fermionen, 55
finites Mas, 18
Fourier-Transformation, 53, 58, 107
Fubini-Theorem, 105, 107
Funktional, 92
Funktionsklassen, 19
Gautrin, siehe de Dormale/Gautrin
Gelfand, 9
Gelfandsches Raumtripel, 9, 87, 109
de Graaf, 10
126
127
STICHWORTVERZEICHNIS
grobere Topologie, 112
Grosmann, 19, 29, 30, 32, 79, 85
Halmos/Sunder, 42
Hamilton-Operator, 60, 63, 66, 72
Haufungspunkt, 24
Hauptwert des Integrals, 94
Heisenberg-Bild-Darstellung, 68
Henze, 15, 19
Hilbertraum, 28
Hilbertraum-Topologie, 111, 113, 114
idempotent, 36
implizit zeitabhangige Observable, 62, 66
Impuls, 54
Impulsdarstellung, 8, 53
injektiv, 25
inneres Produkt, 26, 57
Integral
Lebesgue-Integral, 20
Riemann-Integral, 21
invarianter Teilraum, 87
inverser Operator, 32, 38, 106
isometrisch, siehe langentreu
Jauch/Misra, 9
Jelitto, 51, 62
Kommutativgesetz, 22
Kommutator, 73
Kommutierbarkeit, 32, 40, 83
kompakter Trager, 24
kompatible Observablen, 50
Konstanzpunkt eines Mases, 75
kontinuierliches Spektrum, 80
Konvergenz eines Netzes, 111
Konvergenz im Mittel, 28
Kugelfunktionen, 118
Langentreue, 38, 101
Laplace-Operator, 60
Lebesgue-Integral, siehe Integral
Lebesgue-Mas, 18, 103
Lichtsekunde, 14
linearer Raum, 22
Linearkombinationen, 23
lokal konvexer Raum, 111
Lozada/Sarrazin/Torres, 116
Ludwig, 49
Melsheimer, 10
Mesapparatur, 47
mesbare Funktion, 20, 21
mesbare Mengen, 16
Mesgrose (quantenmechanische), 49
Messiah, 89, 116, 118, 119
Misra, siehe Jauch/Misra
Mittelwert, 71
Multiplikationsoperator, 39
Netz, 76, 110
von Neumann-Algebra, 42
von Neumann-Methode, 2, 86
von Neumann-Methode, 8
Norm eines Operators, 33
Norm eines Vektors, 27
Normierung der Eigenvektoren, 101
nukleare Topologie, 10, 100, 114
Nullmenge, 19, 57
Nullvektor, 22
Observable, 7, 49
offene Menge, 24, 75, 111
Operator, 31
im Hilbertraum, 31
Produkt, 32, 82
Summe, 32, 82
orthogonal, 29, 36
Orthogonalprojektion, siehe Projektor
Orthogonalsystem, 29
Orthonormalsystem, 29, 37
Orthonormierungsbedingung, 106
Ortsdarstellung, 8
Pietsch, 115
Projektor, 36, 84
Prozes, 45
Prugovečki, 9, 15, 19, 64
Punktmas, 19
pure points, 19
quadratintegrable Funktion, 23
quadratsummable Funktion, 23
Quantenfeldtheorie, 47, 49
rationales Maseinheitensystem, 14
reduzierte Masse, 116
Reed/Simon, 34, 83, 103, 107, 113, 114
RHS, siehe Rigged Hilbert Space
Riemann-Integral, siehe Integral
magnetisches Moment, 55
Rigged Hilbert Space, 8, 87
Mas, 17
Roberts, 9, 28, 89, 109, 110, 115
Maurin, 75, 78, 113, 114, 116
Roberts-Basis, 89, 110, 115
maximal scharfe Mesapparatur, siehe Mesappa- Roberts-Raum, 90, 110, 115
ratur
Roberts-Topologie, 115
128
σ-additiv, 17
σ-finites Mas, 18, 78
s.a. Operator, siehe selbstadjungierter Operator
Schaefer, 115
Schrodinger-Bild-Darstellung, 63, 68
Schrodinger-Darstellung, 52, 58–60, 63, 64, 68
Schrodinger-Funktion, 52, 58, 59, 68
Schrodinger-Gleichung
zeitabhangige, 65
zeitunabhangige, 68
Schwabl, 56
schwachere Topologie, 112
Schwarzsche Ungleichung, 26
selbstadjungierter Operator, 34, 39, 60
Seminorm, 111
separabler Hilbertraum, 29
Simon, siehe Reed/Simon
Skalarprodukt, siehe inneres Produkt
Spektraldarstellung, 7, 42, 100
Spektralschar, 8, 42, 44, 84
Spektrum, 77, 108
Spin, 45, 55
Spin-Bahn Kopplung, 62
Spin-Komponente, 55
Sprungpunkt eines Mases, 19, 75
Standardabweichung, 71
starke Summe, 82
starkere Topologie, 112–114
starkes Produkt, 82
stationarer Zustand, 67
stetiges Funktional, 110
Φ-Stetigkeit, 110, 113, 114
Stetigkeit der algebraischen Operationen, 28
Stetigkeit des Skalarproduktes, 28
Stetigkeit von Operatoren, 33, 35
Strahl, 26, 36, 37, 46
Sunder, siehe Halmos/Sunder
superselection rules, 47, 49
surjektiv, 31, 38, 101
symmetrischer Operator, 34
Teilraum
linearer, 23
vollstandiger, 36
Tihonov-Topologie, 75
Topologie, 112
Trager einer Funktion, 24
Trager eines Mases, 18, 75
Treves, 115
uberabzahlbar, 17
uberall definierter Operator, 31, 33, 39
Umgebung, 75
unitaraquivalent, 38, 42
unitare Transformation, 38
STICHWORTVERZEICHNIS
unitarer Operator, siehe unitare Transformation
Unscharfe, 48, 54, 71
Unscharferelation, 54
v-Operator, 39
Varianz, 71
Vektor, 22
Vektorpotential, 51, 61
Vektorraum, siehe linearer Raum
verallgemeinerte Funktion, 94
Vielfachheit, siehe Entartungsgrad
vollst. Satz s.a. Operat., 43, 50
vollstandiger Raum, 28, 115
vollstandiges Orthonormalsystem, 29, 37
Wachstumspunkt eines Mases, 75
Wechselwirkungsbild-Darstellung, 69
Welle-Teilchen Dualismus, 54
Wellenfunktion, 52
Wellenlange, 54
Wellenvektor, 54
Wertevorrat des Operators, 31
wesentlich s.a., siehe e.s.a.
Weyl-Kriterium, 79
z-Komponente des Spins, 55
Zeitentwicklungs-Operator, 63
Zustand, 45, 46
Zustandsvektor, 46