High Performance Norm-Motoren - ZITT
Werbung

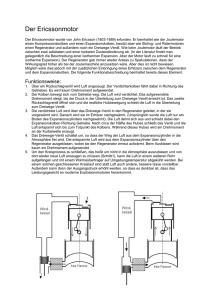
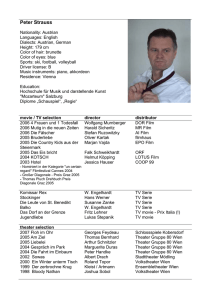
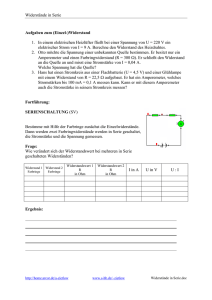
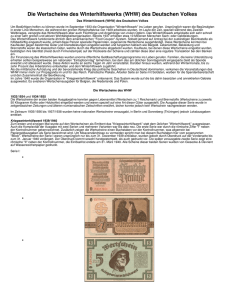
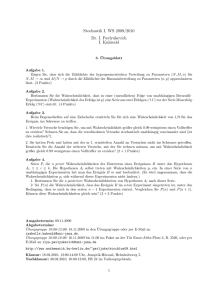
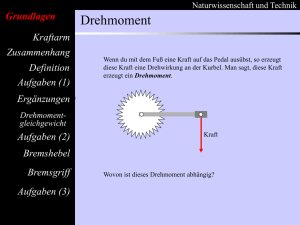
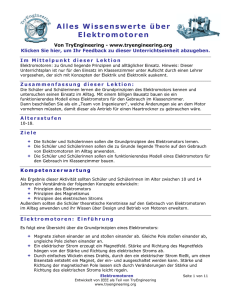
High Performance Norm-Motoren in Anlehnung an die Wirkungsgradklasse IE4 Gesamtausgabe Serie ZKPM „Kalt-Technologie“ steigert die Motorleistung bis zum 4-fachen High Performance Norm-Motoren – Serie ZKPM Übersicht der Baugrössen Bezeichnung ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM ZKPM © Zitt Elektromotoren - Baugrösse 80 80 80 90 90 90 90 90 112 112 112 112 112 Leistung - 2.2 kW 3.0 kW 4.0 kW 2.2 kW 3.0 kW 4.0 kW 5.5 kW 7.5 kW 4.0 kW 5.5 kW 7.5 kW 11.0 kW 15.0 kW - Nenndrehzahl 2000 1/min 2750 1/min 3500 1/min 1000 1/min 1500 1/min 1750 1/min 2500 1/min 3500 1/min 1000 1/min 1500 1/min 2000 1/min 2750 1/min 3750 1/min Version I/13 - FU Typ B B B B B B C C B C C D D Wirkungsgrad 91.7% 92.8% 94.1% 87.7% 89.8% 91.4% 92.4% 94.3% 93.0% 94.8% 96.5% 97.0% 98.0% 2 High Performance Norm-Motoren – Serie ZKPM Motoren-Handbuch Legende Version I/13 Ausgabegrund Erstausgabe Technische Änderungen, die der Verbesserung der Motoren dienen, vorbehalten. Alle Rechte vorbehalten. Kein Teil dieses Dokuments darf in irgendeiner Form (Druck, Fotokopie, Film oder einem anderen Verfahren) ohne schriftliche Genehmigung von Zitt Elektromotoren reproduziert oder unter Verwendung elektronischer Systeme verarbeitet, vervielfältigt oder verbreitet werden. © Zitt Elektromotoren Version I/13 3 High Performance Norm-Motoren – Serie ZKPM Inhaltsverzeichnis 1. Inhaltsverzeichnis 1. 2. Inhaltsverzeichnis ........................................................................................................................ 4 Synchron High Performance Norm-Motoren .................................................................................... 4 2.1. 2.2. Synchron High Performance Norm-Motoren......................................................................................................... 4 Die drei Motoren der ZKPM Serie ........................................................................................................................ 7 3. 4. 5. Sicherheitshinweise ...................................................................................................................... 9 Wichtige Hinweise...................................................................................................................... 10 Allgemeines ............................................................................................................................... 10 5.1. 5.2. 5.3. 5.4. 5.5. Über dieses Handbuch ..................................................................................................................................... 10 Bestimmungsgemäße Verwendung ................................................................................................................... 10 Aufbau der Motoren ......................................................................................................................................... 10 Auswahlkriterien .............................................................................................................................................. 12 Bestellschlüssel für Norm-Motoren mit permanent erregtem Rotor der Serie ZKPM .............................................. 13 6. Montage / Inbetriebnahme ......................................................................................................... 14 6.1. 6.2. 6.3. 6.4. 6.5. Wichtige Hinweise ........................................................................................................................................... 14 Allgemeines..................................................................................................................................................... 15 Umgebungsbedingungen.................................................................................................................................. 15 Abtriebselemente............................................................................................................................................. 15 Elektrische Anschlüsse ..................................................................................................................................... 15 7. Technische Daten ...................................................................................................................... 16 7.1. 7.2. Serie ZPM 80-1,1kW bis 4,0kW, [ nn=1000min-1] ............................................................................................... 16 Begriffsdefinitionen .......................................................................................................................................... 21 2. Synchron High Performance Norm-Motoren 2.1. Synchron High Performance Norm-Motoren In Anlehnung an EN 60034 – 31 mit permanentmagnetischem Rotor ohne Rückführeinheit. Konzipiert zum Betrieb in ∆–Dreieckschaltung an einem Frequenzumrichter mit einer Versorgungsspannung von 400VAC, der ein „Sensorless-Vector-Control“ Regelungsverfahren besitzt. 2.1.1. Erläuterung zur strategisch geringen Typenvielfalt der Motoren. Der klassische Norm-Motor nach EN 60034 besteht bis zu seiner technisch verbesserten Form in der Wirkungsgradklasse IE 3 aus einem Asynchronmotor. Viele Millionen dieser Motoren wurden und werden noch gebaut und verkauft. Sie erfüllen mit günstigen Produktionskosten und großer Zuverlässigkeit wichtige StandardAufgaben. Bei kleineren Motorleistungen werden sie direkt am Netz betrieben, größere Motoren erhalten Anlaufschaltungen oder Frequenzumrichter. Beim Betrieb an Standard-Versorgungsnetzen von z. B. 3 x 400 VAC erfolgt die Anpassung an unterschiedliche Soll-Drehzahlen über: unterschiedliche Polzahlen z.B. (2-4-6) → (3.000 – 1.500 – 1.000min-1) Getriebeunter- oder -übersetzungen Frequenzumrichter Prinzipiell bedeuten: © Zitt Elektromotoren Version I/13 4 High Performance Norm-Motoren – Serie ZKPM Synchron High Performance Norm-Motoren unterschiedliche Polzahlen → logistisch unterschiedliche Motoren Getriebe → zusätzliche Kosten und Wartung Mit der Einführung der IE 4 Wirkungsgradklasse in der Norm EN 60034-31 schreibt der Gesetzgeber eine erneute Reduzierung der Verluste in Normmotoren vor, um weitere kostbare Energie, die bei der Wandlung von elektrischer in mechanischer verloren geht, einzusparen. Nach dem heutigen Stand der Technik lässt sich anhand neuer Materialien, vorhandenem technischen Know-How und Serienerfahrung der Norm-Asynchronmotor durch Synchronmotoren ersetzen. Die Motorverlustleistung reduziert sich auf etwa die Hälfte. Die Motorenserie ZKPM (Zitt-Kompakt-Permanentmagnet-Motor) greift das physikalische Grundprinzip des Synchronmotors auf und verbindet dies mit weiteren Elementen eines bewährten Serienmotorprinzips: Permanentmagnet-Synchron-Motor o Anlehnung an den Normentwurf EN 60034-31 o Motorgehäuse und Leistungsstufen der Norm-Motoren IE 4 Geeignet für Frequenzumrichter mit Software „Sensorless-Vector-Control“ o Sehr guter Motorwirkungsgrad Vielfältige Funktionserweiterung wie Drehmomentregelung Drehzahlregelung Teilweise Positionierfunktion Programmierbare Beschleunigungs- und Verzögerungsrampen Drehzahl- und Leistungsanpassung an aktuelle Lasterfordernisse (Pumpen, Lüfter …) Keine Rückführeinheit notwendig o Platz- und Kostenersparnis o Die Signaldetektion der „Sensorless-Vector-Control“ reicht in ihrer Genauigkeit und Bandbreite für viele Applikationen völlig aus. Belüftung an der B-Seite o Ein Lüfterrad auf der Welle nach Norm steigert die Motorleistung bis zum 4-fachen. Wirkungsgrad Steigerung bis 98 % o Energieoptimal cos φ bis 0,98 o Stromoptimal Die „Kalt-Technologie“ ermöglicht eine besonders günstige Drehmoment-Kennlinie Eine Vielzahl von einzelnen Maßnahmen geben den Motoren eine konstante Drehmoment-Kennlinie! Als Maßnahmen seien erwähnt: Optimales Konzept des magnetischen Kreises © Zitt Elektromotoren Version I/13 5 High Performance Norm-Motoren – Serie ZKPM Synchron High Performance Norm-Motoren Motorpolzahl Lüfter-Rad Gegen-EMK Werte Die Abbildung 1 zeigt die Drehmoment- sowie Leistungs-Kennlinien für den 1,1kW, den 2,2kW und den 4,0kW Motor. Die durchgezogenen Linien stellen jeweils den Verlauf des Drehmomentes und die gestrichelten Linien den Verlauf der Leistung des entsprechenden Motors dar. —ZKPM1,1 Drehmoment PMkW 1,1k W Drehmoment —ZKPM2,2 PMkW 2,2kDrehmoment W Drehmoment —ZKPM4,0 kW Drehmoment Drehmoment PM 4,0kW - -ZKPM1,1 kW Leistung 1,1k W Leistung MPM - -ZKPM4,0 kW Leistung Leistung M PM 4,0kW M Drehmoment [Nm] Drehmoment[Nm] 40 M - -ZKPM2,2 2,2kLeistung W Leistung M PMkW M 38,2 20 18 35 30,5 16 30 14 25 12 21 20 10 16,8 8 15 8, 4 10 10,5 6 4 4 2,2 1,1 2 3,2 1, 7 5 0 Leistung [kW] Leistung [kW] 0, 8 0 500 1000 Drehzahlstellbereich 1500 Sternschaltung 2000 Drehzahlstellbereich 2500 3000 3500 0 4000 [U/min] Dreieckschaltung Abbildung 1: Darstellung der Drehmoment- und Leistungs-Kennlinien der ZKPM-Serie Die im ∆-geschalteten Maschinen liefern an der Abtriebswelle zu jeder Drehzahl zwischen 1.000 und 4.000 U/min bei annähernd gleicher Wicklungstemperatur das Bemessungsmoment. Die Motoren können auch im Y-geschaltet werden, dabei sinkt die maximal mögliche Drehzahl auf die Hälfte ab. Der Nennstrom reduziert sich ebenfalls, wodurch ein Frequenzumrichter niedrigerer Leistungsklasse verwendet werden kann. Über die StandardLeistungsformel: (1) ergibt sich bei konstantem Drehmoment mit steigender Drehzahl die steigende Leistung. Ein Motor mit der Baugröße eines 4,0kW Typs leistet beispielsweise bei 4.000min -1 problemlos 16,0kW bei Belastung mit dem Bemessungsmoment! © Zitt Elektromotoren Version I/13 6 High Performance Norm-Motoren – Serie ZKPM Synchron High Performance Norm-Motoren Die Abbildung 2 zeigt den Verlauf des Wirkungsgrads über der Drehzahl der drei Motoren mit 1,1kW, 2,2kW und 4,0kW bei Abgabe des Bemessungsmoments. Die Darstellung lehnt sich an den Entwurf zur Norm EN 60034-31 an. —ZKPM 1,1 kWMPM —ZKPM kW —ZKPM 4,0 kW 2,2kW 2,2 MPM 1,1kW MPM 4,0kW Wirkungsgrad [%] W irkungsgrad [%] 100 98,3 97,7 98 96,5 95,7 96 94 93,7 93 91,8 92 95,3 93,2 91,7 90 88 88 87,7 86 84 82 80 500 1000 1500 2000 2500 3000 3500 4000 [U/m in] Abbildung 2: Darstellung der Wirkungsgrade bei Belastung der ZKPM-Serie mit dem Bemessungsmoment 2.2. Die drei Motoren der ZKPM Serie Serie ZKPM 80-1,1kW -1 Drehmoment 10,5Nm -1 Drehmoment 10,5Nm -1 Drehmoment 10,5Nm -1 Drehmoment 10,5Nm bei 1.000min : bei 2.000min : bei 3.000min : bei 4.000min : Serie ZKPM 90-2,2kW Drehmoment 21Nm -1 Drehmoment 21Nm -1 Drehmoment 21Nm -1 Drehmoment 21Nm bei 2.000min : bei 3.000min : bei 4.000min : Serie ZKPM 112-4,0kW Drehmoment 38,2Nm -1 Drehmoment 38,2Nm -1 Drehmoment 38,2Nm -1 Drehmoment 38,2Nm bei 1.000min : bei 2.000min : bei 3.000min : bei 4.000min : © Zitt Elektromotoren ≙ mechanische Leistung von 2,2kW ≙ mechanische Leistung von 3,3kW ≙ mechanische Leistung von 4,4kW ∆ – Schaltung ≙ mechanische Leistung von 2,2kW ≙ mechanische Leistung von 4,4kW ≙ mechanische Leistung von 6,6kW ≙ mechanische Leistung von 8,8kW Drehzahl 0 – 4.000min-1 -1 ∆ – Schaltung ≙ mechanische Leistung von 1,1kW Drehzahl 0 – 4.000min-1 -1 bei 1.000min : Drehzahl 0 – 4.000min-1 ∆ – Schaltung ≙ mechanische Leistung von 4,0kW ≙ mechanische Leistung von 8,0kW ≙ mechanische Leistung von 12,0kW ≙ mechanische Leistung von 16,0kW Version I/13 7 High Performance Norm-Motoren – Serie ZKPM Ein Betrieb in Y–Sternschaltung ist auch möglich, allerdings ist der Drehzahlstellbereich bei der Verwendung eines Frequenzumrichters mit einer Versorgungsspannung von 400VAC auf maximal 2000min -1 begrenzt. Die bekannten Drehmomente und die in Abhängigkeit der Drehzahl abgegebene mechanische Leistung, definiert durch Gleichung (1), bleiben gleich. Eine Verschaltung der Wicklungsstränge im Stern bewirkt einen um den Faktor 1,73 reduzierten Phasenstrom bei gleichzeitiger Erhöhung der benötigten Phasenspannung um denselben Faktor. Die aufgenommene elektrische Wirkleistung ist bei beiden Verschaltungsarten bis zu einer Drehzahl von 2000min-1 identisch. Es ergeben sich für die Y–Sternschaltung die folgenden Werte: Serie ZKPM 80-1,1kW -1 Drehmoment 10,5Nm -1 Drehmoment 10,5Nm bei 1.000min : bei 2.000min : -1 ab 2.000min : Drehmoment < 10,5Nm Serie ZKPM 90-2,2kW -1 Drehmoment 21Nm bei 2.000min-1: Drehmoment 21Nm ab 2.000min : Drehmoment < 21Nm Serie ZKPM 112-4,0kW Drehmoment 38,2Nm -1 Drehmoment 38,2Nm bei 1.000min : bei 2.000min : -1 ab 2.000min : ≙ mechanische Leistung von 2,2kW ≙ mechanische Leistung kleiner 2,2kW Drehmoment < 38,2Nm Y – Schaltung ≙ mechanische Leistung von 2,2kW ≙ mechanische Leistung von 4,4kW ≙ mechanische Leistung kleiner 4,4kW Drehzahl 0 – 2.000min-1 -1 Y – Schaltung ≙ mechanische Leistung von 1,1kW Drehzahl 0 – 2.000min-1 bei 1.000min : -1 Drehzahl 0 – 2.000min-1 Y – Schaltung ≙ mechanische Leistung von 4,0kW ≙ mechanische Leistung von 8,0kW ≙ mechanische Leistung kleiner 8,0kW Geeignete Anwendungen: Alle klassischen Anwendungen der bisherigen Normmotoren sind geeignet, wie Applikationen die zusätzliche Funktionen benötigen und natürlich Dauerläüfer mit langer Einschaltdauer oder Teillastbetrieb. Applikationsbeispiele: Pumpen, Kompressoren oder Ventilatoren. Je länger die Betriebsdauer im Jahr mit 100 % Nennlast oder im Teillastbetrieb, umso schneller sind die Amortisationszeiten erreicht. Entsprechende Rechenprogramme weisen in der Regel auf Zeiten, die unter einem Jahr liegen. Interessant sind auch die Auswirkungen des besseren cos φ. Bei langen Leitungen mit Spannungsabfall muss deutlich weniger Strom transportiert werden oder die Leitungsquerschnitte sind zu reduzieren. © Zitt Elektromotoren Version I/13 8 High Performance Norm-Motoren – Serie ZKPM Sicherheitshinweise 3. Sicherheitshinweise Alle Arbeiten zum Transport, Anschluss, zur Inbetriebnahme und Installation dürfen nur von geschultem und qualifiziertem Fachpersonal ausgeführt werden. Dabei muss es folgende Normen bzw. Richtlinien kennen und beachten: DIN VDE 0105, IEC 364, Unfallverhütungsvorschriften Unsachgemäßes Verhalten kann schwere Personen- und Sachschäden verursachen. Die Maschinen entsprechen den Normen IEC/EN 60034 Lesen Sie vor der Montage und Inbetriebnahme die vorliegende Dokumentation. Halten Sie die Angaben zu den Anschlussbedingungen (Typenschild und Dokumentation) und die technischen Daten ein. Stellen Sie eine ordnungsgemäße, niederohmige Erdung des Motorgehäuses mit dem PE-Bezugspotential im Schaltschrank sicher, da sonst keine personelle Sicherheit gewährleistet ist. Treffen Sie geeignete Maßnahmen, dass unvorhergesehene Bewegungen nicht zu Schäden an Personen oder Sachen führen können. Leistungsanschlüsse können auch dann Spannung führen, wenn der Motor steht. Lösen oder ziehen Sie keine Anschlussstecker während des Betriebs oder unter Spannung. Es können Lichtbögen entstehen und Personen und Kontakte schädigen. An den Motoren können Oberflächentemperaturen von über 100°C auftreten. Sorgen Sie dafür, dass dort keine temperaturempfindlichen Teile anliegen oder befestigt werden. Eventuell sind Schutzmaßnahmen gegen Berühren vorzusehen. Beachten Sie weitere Sicherheitshinweise in der Bedienungsanleitung, die jedem Motor bei liegt. In diesem Handbuch verwendete Symbole Allgemeine Warnung Bedeutung: Gefährdung durch Elektrizität Körperverletzungen Bedeutung: Tod, schwere Körperverletzung oder und Sachschäden können auftreten, wenn erheblicher Sachschaden können auftreten, wenn die die entsprechenden Vorsichtsmaßnahmen nicht Leichte entsprechenden nicht getroffen werden. © Zitt Elektromotoren Vorsichtsmaßnahmen getroffen werden. Version I/13 9 High Performance Norm-Motoren – Serie ZKPM Wichtige Hinweise 4. Wichtige Hinweise Die Norm-Motoren der Serie ZKPM sind Präzisionsmotoren. Sie sind nicht für einen direkten Anschluss an das Drehstromnetz vorgesehen, sie müssen an einem Frequenzumrichter, der ein „Sensorless-Vector-Control“ Regelungsverfahren für permanent erregte Synchronmaschinen besitzt, betrieben werden. Ein direkter Netzanschluss führt zur Zerstörung des Motors. Zum Aufziehen von spielfreien, reibschlüssigen Abtriebselementen benutzen Sie unbedingt das vorgesehene Anzugsgewinde in der Motorwelle und erwärmen Sie, sofern möglich, die Abtriebselemente. Das Aufziehen der Abtriebselemente darf nur mit geeigneten Hilfsmitteln erfolgen. Vermeiden Sie harte Schläge oder Stöße auf den Motorflansch und die Motorwelle. Achten Sie auf korrektes Ausrichten der Kupplung. Beachten Sie die Hinweise des Kupplungsherstellers. Ein Versatz führt zu unzulässigen Vibrationen und zur Zerstörung von Kugellagern und Kupplung. Beachten Sie bei Anwendung von Zahnriemen unbedingt die zulässigen Radialkräfte. Zu hohe Radialbelastung der Welle verkürzt die Lebensdauer des Motors erheblich. Stellen Sie in dem Frequenzumrichter unbedingt die korrekte Motorpolzahl ein. Eine fehlerhafte Einstellung kann zur Zerstörung des Motors und Überhitzung führen. 5. Allgemeines 5.1. Über dieses Handbuch Dieses Handbuch beschreibt die Synchron High Performance Norm-Motoren mit permanent erregtem Rotor der Serie ZKPM und richtet sich an Fachpersonal mit Kenntnissen in den Bereichen Elektrotechnik und Maschinenbau. Die Norm-Motoren werden zusammen mit den entsprechenden Frequenzumrichtern betrieben. Beachten Sie daher auch unbedingt die Dokumentationen des Frequenzumrichters. 5.2. Bestimmungsgemäße Verwendung Die Synchron High Performance Norm-Motoren der Serien ZKPM sind ausschließlich zum Betrieb an Frequenzumrichter konzipiert. Der direkte Betrieb am Netz führt zur sofortigen Zerstörung des Motors. Sie dürfen die Motoren nur unter Berücksichtigung der in dieser Dokumentation definierten Umgebungsbedingungen betreiben. Die Motoren werden als Bauteile in Maschinen eingebaut und dürfen nur als integrierte Bauteile einer Anlage in Betrieb genommen werden. Ein in die Motorwicklung eingebautes Thermoschutzelement muss, wenn vorhanden, ausgewertet und überwacht werden. 5.3. Aufbau der Motoren Die Synchron High Performance Norm-Motoren der Serien ZKPM sind bürstenlose permanenterregte Synchronmotoren mit Gegen-EMK. Sie besitzen vergrabene Permanentmagnete im Rotor. Im Stator ist eine dreiphasige Wicklung untergebracht, die in Stern- oder Dreieckschaltung verschaltet werden kann und durch einen Frequenzumrichter versorgt wird. Der Motor besitzt keine Bürsten, die Kommutierung wird elektronisch im entsprechenden Frequenzumrichter vorgenommen. Auf der B-Seite der Welle ist ein Lüfterrad montiert, das für eine drehzahlabhängige Kühlung der Motoren sorgt. © Zitt Elektromotoren Version I/13 10 High Performance Norm-Motoren – Serie ZKPM 5.3.1. Allgemeines Wellenende A-Seite Die Kraftübertragung erfolgt über das zylindrische Wellenende A. Beachten Sie, dass sehr hohe Radialkräfte auftreten, wenn die Motoren über Ritzel oder Zahnriemen antreiben. Die zugelassenen Werte am Wellenende sind abhängig von der Drehzahl. Die Maximalwerte bei 4.000min-1 finden Sie in der Tabelle 1. Bei Kraftangriff an der Mitte des freien Wellenendes kann FR 10% größer sein. Als ideale Kupplungselemente haben sich doppelkonische Spannzangen eventuell in Verbindung mit MetallbalgKupplungen bewährt. Tabelle 1: Zulässige Lagerbelastungen Welle A-Seite Motortyp ZKPM 80-1,1 ZKPM 90-2,2 ZKPM 112-4,0 FRmax [N] FAmax [N] 630 700 820 125 137 150 L/2 FRmax [N]+FAmax [N] 126 140 164 FR FA L 5.3.1.1. Besonderheit der Last auf Lastseite Der besondere Aufbau der ZKPM Motoren ermöglicht ein konstantes Drehmoment von 1.000 min-1 bis 4.000 min-1. Die Bemessungsleistung ist bei 1.000 min-1 angegeben, bei der technisch möglichen 4–fachen Drehzahl ergibt sich auch die 4-fache Leistung. Damit wird z. B. aus einem 1,1 kW Motor ein 4,4 kW Motor. Bei der Motorwelle muss man beachten, dass die Welle eines 4,4 kW Motors bei der Bemessungsdrehzahl 1.000 min-1 eine Welle mit deutlich größerem Durchmesser ist. Im Ergebnis: Zitt Elektromotoren wollte bewusst die Leistungssteigerung des elektromagnetischen Kreises nutzbar machen. Das setzt voraus, dass der Anwender die Einschränkungen von radialen und axialen Kräften auf der Lastwelle entsprechend der Tabelle in 5.3.1. konsequent einhält, da sonst die Garantie erlischt. © Zitt Elektromotoren Version I/13 11 High Performance Norm-Motoren – Serie ZKPM 5.3.2. Allgemeines Schutzart (ohne Wellendichtring) Standardausführung für alle Motortypen ist: ZKPM 80-1,1kW ZKPM 90-2,2kW IP55 ZKPM 112-4,0kW 5.3.3. Anschlusstechnik Die Motoren lassen sich für den Betrieb am Frequenzumrichter im Stern bzw. Dreieck verschalten. Die folgende Abbildung 3 zeigt die notwendige Wicklungsverschaltung im Klemmenkasten: Abbildung 3: mögliche Wicklungsverschaltung 5.4. Auswahlkriterien • Bemessungsmoment Mn [Nm] • Bemessungsdrehzahl beim Bemessungsmoment nn [min-1] • Bemessungsleistung Pn [kW] Beachten Sie bei der Berechnung der erforderlichen Motoren und Frequenzumrichter die statische Last und die dynamische Belastung (Beschleunigen/Bremsen). © Zitt Elektromotoren Version I/13 12 High Performance Norm-Motoren – Serie ZKPM Allgemeines 5.5. Bestellschlüssel für Norm-Motoren mit permanent erregtem Rotor der Serie ZKPM Motortyp: ZKPM Baugrösse: 80, 90 oder 112 Leistung: o 1,1 = 1,1kW o 2,2 = 2,2kW o 4,0 = 4,0kW Option: x = in Vorbereitung Frequenzumrichtertyp: o B = 2.2kW / 3kW / 4kW o C = 5.5kW / 7.5kW o D = 11kW / 15kW / 18.5kW / 22kW Frequenzumrichter Nennleistung: o 2,2 = 2,2kW Befestigung: o B3 = Fuß o B5 = Flansch © Zitt Elektromotoren Version I/13 13 High Performance Norm-Motoren – Serie ZKPM Montage / Inbetriebnahme 6. Montage / Inbetriebnahme 6.1. Wichtige Hinweise Prüfen Sie die Zuordnung von Frequenzumrichter und Motor. Vergleichen Sie Nennspannung und Nennstrom der Geräte. Führen Sie die Verdrahtung nach dem Anschlussbild in der Installations-/lnbetriebnahmeanweisung des Frequenzumrichters aus. Achten Sie auf einwandfreie Erdung von Frequenzumrichter und Motor. Verlegen Sie sämtliche Leitungen in ausreichendem Querschnitt. Legen Sie Abschirmungen großflächig (niederohmig), EMV-gerecht auf. Prüfen Sie die Einhaltung der zulässigen Radial- und Axialbelastungen FR und FA. Bei Verwendung eines Zahnriemen-Antriebs ergibt sich der minimal zulässige Durchmesser des Ritzels z. B. nach der Gleichung: dmin ≥ M0/FR x 2 . Platzieren Sie die Norm-Motoren nie mit der B-Seite (Lüfterrad) direkt an der Wand. Halten Sie einen Mindestabstand von 20cm ein, ansonsten kann es aufgrund einer zu geringen Kühlleistung zur Überhitzung und zur eventuellen Zerstörung des Norm-Motors kommen. Halten Sie sich während des Betriebs strikt an die im Datenblatt genannten maximalen Strom- bzw. Spannungsgrenzen, ansonsten kann es zur Zerstörung des Motors kommen. Sollte der Motor unter Verwendung des Frequenzumrichters nicht starten, fordern Sie eine Service-Unterstützung zur Parametrierung des Frequenzumrichters an. Zur Wartung der Lager dürfen die Lagerschilde der A- und B-Seite entfernt werden. Das Herausziehen des magnetischen Rotors ist strikt untersagt. Vermeiden Sie Berührungen mit der Wicklung, da diese sonst zu Schaden kommen kann. Im Falle von Fehlern: Nehmen Sie den Motor in keinem Falle auseinander! Der magnetische Rotor wird durch starke Anziehungskräfte der Magnete in der Mitte des Stators gehalten, auch wenn die Lagerschilde entfernt sind. Ein eventueller Versuch den Rotor herauszuziehen erzeugt sehr hohe Rückstellkräfte. Die Gefahr von Unfällen und Verletzungen sind sehr groß! Im Falle von Fehlern oder Störungen fordern Sie bei Zitt Elektromotoren eine Service-Unterstützung an oder senden Sie den Motor zurück. Vorsicht! Lösen Sie die elektrischen Anschlüsse der Motoren nie unter Spannung. Restladungen in den Kondensatoren des Frequenzumrichters können auch bis zu 5 Minuten nach Abschalten der Netzspannung vorhanden sein. Steuer- und Leistungsanschlüsse können Spannung führen auch wenn sich der Motor nicht dreht. © Zitt Elektromotoren Version I/13 14 High Performance Norm-Motoren – Serie ZKPM Montage / Inbetriebnahme 6.2. Allgemeines Vor der Inbetriebnahme bzw. der Aufstellung der Motoren überprüfen Sie die Motoren auf Transport und/oder Lagerschäden. Melden Sie uns unverzüglich eventuell beschädigte Maschinenteile sowie Korrosionsschäden an Welle oder Flansch. Der Läufer muss sich leicht von Hand drehen lassen, eine vorhandene Bremse vorher elektrisch lösen. 6.3. Umgebungsbedingungen Für den Aufstellungsort der Motoren beachten Sie die Umgebungsbedingungen wie Umgebungstemperatur: -20...+40°C, maximale Aufstellungshöhe: 1000m üNN, relative Luftfeuchtigkeit: 15...85%, nicht kondensierend. Bei Abweichung von den o.a. Umgebungsbedingungen ist eine eventuelle Leistungsreduzierung erforderlich. Die Motoren sind nicht für eine Aufstellung im Freien sowie in aggressiver oder fremdstoffbehafteter Atmosphäre geeignet. 6.4. Abtriebselemente Der Rotor des Motors wurde bei der Herstellung elektronisch gewuchtet. Bevor Sie Ihre Abtriebselemente auf das Wellenende ziehen, entfernen Sie den evtl. vorhandenen Korrosionsschutz. Verwenden Sie unbedingt geeignete Hilfsmittel für das Auf- und Abziehen der Abtriebselemente und berücksichtigen Sie die Hinweise des Herstellers der Abtriebselemente um Beschädigungen zu vermeiden. Unser Tipp: Verwenden Sie doppelkonische Spannsätze. Beim Auf- bzw. Abziehen vermeiden Sie unbedingt harte Schläge oder Stöße auf den Motorflansch und die Motorwelle. Hierdurch kann es zu Beschädigungen der Lager oder der Welle kommen. 6.5. Elektrische Anschlüsse Die elektrischen Anschlussarbeiten dürfen nur durch eine qualifizierte Elektrofachkraft hergestellt werden. Dabei ist vor Beginn der Arbeiten die Spannungsfreiheit der Anlage festzustellen und für die Dauer zu gewährleisten. Beachten Sie die Sicherheitsregeln der DIN VDE 0105. Der Kabelquerschnitt muss dem Nennstrom des Motors entsprechend ausgelegt werden. Berücksichtigen Sie dabei die Umgebungsbedingungen, die Verlegeart und die örtlichen Bestimmungen. Beachten Sie unbedingt die Hinweise des Frequenzumrichter-Herstellers zur EMV-gerechten Verdrahtung. Bei Verwendung von geschirmten Kabeln achten Sie auf eine großflächige metallische Schirmanbindung auf beiden Kabelseiten. © Zitt Elektromotoren Version I/13 15 High Performance Norm-Motoren – Serie ZKPM Technische Daten 7. Technische Daten 7.1. Serie ZPM 80-1,1kW bis 4,0kW, [ nn=1000min-1] ZKPM 80-1,1-x-x-B3 ZKPM 80-1,1-x-x-B5 © Zitt Elektromotoren Version I/13 16 High Performance Norm-Motoren – Serie ZKPM Technische Daten ZKPM 90-2,2-x-x-B3 ZKPM 90-2,2-x-x-B5 © Zitt Elektromotoren Version I/13 17 High Performance Norm-Motoren – Serie ZKPM Technische Daten ZKPM 112-4,0-x-x-B3 ZKPM 112-4,0-x-x-B5 © Zitt Elektromotoren Version I/13 18 High Performance Norm-Motoren – Serie ZKPM Technische Daten H B Motortyp Bauart B3 ZKPM 80-x,x-B ZKPM 90-x,x-B ZKPM 90-x,x-C ZKPM 112-x,x-B ZKPM 112-x,x-C 80M 90L 90L 112M 112M ZKPM 112-x,x-D 112M Bauart B5 ZKPM 80-x,x-B 80M ZKPM 90-x,x-B ZKPM 90-x,x-C ZKPM 112-x,x-B ZKPM 112-x,x-C 90L 90L 112M 112M ZKPM 112-x,x-D 112M © Zitt Elektromotoren Gewicht Gesamthöhe H Übermass B kg mm mm 20 26 29.7 42 45.7 340 360 400 420 420 450 80 30 70 20 100 340 80 360 400 420 420 450 30 70 20 100 58 21 28 31.7 47 50.7 63 Version I/13 19 High Performance Norm-Motoren – Serie ZKPM Daten ∆-Schaltung Bemessungsdrehzahl Sym nn Einheit min Technische Daten ZKPM 80-1,1 ZKPM 90-2,2 -1 1000 Max. Drehzahl nmax min-1 4000 Anschlussspannung UAC V 3 × 400 Nennspannung Un V 100 Motorpolzahl pMot Bemessungsdrehmoment Mn ZKPM 112-4,0 6 Nm 10,5 21,0 38,2 Bemessungsstrom In A 7,5 14,8 25,6 Stillstandsdrehmoment M0 Nm 8,4 16,8 30,5 Stillstandsstrom I0 A 6 11,8 20,4 Max. Drehmoment Mmax Nm 15,75 31,5 57,3 Spitzenstrom Imax A 11,25 22,2 38,4 Spannungskonstante KE V/1000 86,8 90,2 90,7 Drehmomentkonstante KT Nm/A 1,4 1,42 1,49 Nennleistung Wicklungswiderstand Phase-Phase Wicklungsinduktivität Phase-Phase Pn kW 1,1 2,2 4,0 Rpp 1,13 0,64 0,38 Lpp mH 2,9 1,2 0,525 Rotorträgheitsmoment Jm kgcm2 26,92 55,63 135,7 Elektr. Zeitkonstante Tel ms 1,96 1,45 3,00 ZKPM 90-2,2 ZKPM 112-4,0 10% Toleranz bei M0, Mn und nn. Daten Y-Schaltung Bemessungsdrehzahl Sym nn Einheit min ZKPM 80-1,1 -1 1000 Max. Drehzahl nmax min-1 4000 im Feldschwächbetrieb möglich Anschlussspannung UAC V 3 × 400 Nennspannung Un V 174 Motorpolzahl pMot Bemessungsdrehmoment Mn 6 Nm 10,5 21,0 38,2 Bemessungsstrom In A 4,3 8,5 14,8 Stillstandsdrehmoment M0 Nm 8,4 16,8 30,5 Stillstandsstrom I0 A 3,5 6,8 11,8 Max. Drehmoment Mmax Nm 15,75 31,5 57,3 Spitzenstrom Imax A 6,6 9,0 23,9 Spannungskonstante KE V/1000 150 156,2 157,1 Drehmomentkonstante KT Nm/A 2,4 2,45 2,59, Nennleistung Wicklungswiderstand Phase-Phase Wicklungsinduktivität Phase-Phase Pn kW 1,1 2,2 4,0 Rpp 3,36 1,93 0,568 Lpp mH 11,59 4,78 2,1 Rotorträgheitsmoment Jm kgcm2 26,92 55,63 135,7 Elektr. Zeitkonstante Tel ms 3,4 2,5 5,2 10% Toleranz bei M0, Mn und nn. © Zitt Elektromotoren Version I/13 20 High Performance Norm-Motoren – Serie ZKPM Technische Daten 7.2. Begriffsdefinitionen Stillstandsdrehmoment M0 [Nm] Thermisches Grenzdrehmoment, welches bei blockiertem Motor, n=0min -1 und Nenn-Umgebungsbedingungen unbegrenzt lange abgegeben werden kann. Bemessungsdrehmoment Mn [Nm] Wenn der Motor bei Bemessungsdrehzahl nn seinen Bemessungsstrom aufnimmt, kann im S1-Betrieb das Bemessungsdrehmoment unbegrenzt lange abgegeben werden. Stillstandsstrom I0 [A] Um im Stillstand das Stillstandsdrehmoment abzugeben, nimmt der Motor den Stillstandsstrom auf. Die Angabe bezieht sich auf den Sinus-Effektiv-Stromwert. Bemessungsstrom In [A] Bei Bemessungsdrehzahl nn und Abgabe des Bemessungsdrehmomentes nimmt der Motor den Bemessungsstrom auf. Die Angabe bezieht sich auf den Sinus-Effektiv-Stromwert. Spitzenstrom Imax [A] Maximal zulässiger Strom für max. 5sec. Der Spitzenstrom sollte den 1,2-fachen Bemessungsstrom nicht übersteigen. Ein selbst kurzfristiges Überschreiten dieser Stromgrenze kann eine irreversible Entmagnetisierung der Rotormagnete zur Folge haben. Drehmomentkonstante KT [Nm/A] Diese Konstante gibt an, wie viel Drehmoment [Nm] der Motor bei einem Strom von 1A Effektivstrom abgibt. (M = I * KT) Spannungskonstante KE [V/1000min-1] Diese Konstante gibt die auf 1000min-1 bezogene induzierte Motor-EMK als Effektivwert zwischen zwei Motorphasen an. Massenträgheitsmoment Jm [kgcm2] Massenträgheitsmoment des Läufers. Interne oder externe Anbauten (Haltebremse, Gebersystem, Kupplung oder mechanische Last) können die hier angegebenen Werte erheblich ändern. Darum muss für die Berechnung der dynamischen Motorsituation dieses Massenträgheitsmoment in seiner Gesamtheit betrachtet werden. © Zitt Elektromotoren Version I/13 21 High Performance Norm-Motoren – Serie ZKPM Technische Daten Zitt-Handel+Service Eichstrasse 3 8045 Zürich Schweiz Tel. +41 (0)44 462 21 28 Fax +41 (0)44 463 91 93 E-Mail [email protected] www.zitt.ch © Zitt Elektromotoren Version I/13 22