Word Dokument
Werbung

Learning Laws: Self Adaption Equations
1. Definitionen
In diesem Kapitel werden 5 klassische Lernregeln vorgestellt. Diese Regeln werden als Gleichungen
dargestellt, die in der Transferfunktion des Processing elements verwendet werden können.
1.1.
Die Informationsumgebung
Ein neuronales Netz arbeitet immer in einer bestimmten globalen Informationsumgebung (sehr
häufig als Dichtefunktionen dargestellt) von der dann für jedes Processing element eine lokale
Informationsumgebung abgeleitet wird. Ziel ist es nun in einer Lernphase die Processing elements
ihrer lokalen Informationsumgebung anzupassen.
1.2.
Gewichte
Lernen wird meist dadurch erreicht, indem die Gewichte in den einzelnen Processing elements
modifiziert werden (Gewichtstraining). Für das Modell des Prozeß der Gewichtsmodifikation
nehmen wir vereinfachend folgendes an:
Das neuronale Netz hat N Processing elemente
Jedes Processing element hat n Gewichte
Das Schlüsselkonzept ist die Idee eines Gewichtsvektors für das gesamte Netzwerk. Dabei werden
ganz einfach alle Gewichte aller Processing elements miteinander verknüpft. Der Vorteil w als
Vektor aller Gewichte zu betrachten liegt darin, daß dann die Menge aller möglichen
Gewichtsvektoren, die Menge aller möglichen Konfigurationen der Informationsverarbeitungen für
das neuronale Netz bestimmt. Irgendein Vektor dieser Menge an Vektoren liefert dann die
gewünschte Informationsverarbeitungsleistung.
Für neuronale Netze die Gewichtstraining verwenden, liegt nun die Herausforderung darin, eine
Lernregel zu entwickeln die einen Vektor w findet, der dann die gewünschte Netzwerkleistung
erbringt.
Um eine gewünschte Netzwerkleistung zu erreichen gibt es verschiedenste Zugänge:
Beispiele für Lernkategorien
Beim Performance Learning werden Funktionen wie der MSE (Beurteilungskriterium für
die Güte eines Schätzers), Energieverbrauch, Reingewinn oder Klassifizierungsfehler in der
Clusteranalyse maximiert oder minimiert.
Bei Lernmethoden die zur Filter Learning Kategorie gehören, wird wiederum danach
getrachtet Funktionen wie zum Beispiel den Mittelwert eines Inputsignales über einen
bestimmten Zeitraum hinweg zu lernen.
Lernregeln die zur Kategorie Coincidence Learning gehören, verändern die Gewichte als
Antwort auf bestimmten Ereignisse. Dies geschieht immer dann, wenn zwei Ereignisse
innerhalb eines „processing elements“ zusammenstoßen. Ein weiteres Merkmal dieser
Lernmethoden ist, daß sie ausschließlich lokalen Charakter besitzen.
1.3.
Auf welche Arten können Systeme trainiert werden?
Grundsätzlich findet die Anpassung eines neuronalen Netzes immer gemäß einer Trainingsmethode
statt. Man kann 3 allgemeine Trainingsarten unterscheiden:
Supervised Learning (Überwachtes Lernen)
Dem neuronalem Netz werden sowohl Input- als auch korrekte Outputinformationen zur
Verfügung gestellt.
Gerhard Schindlauer, 8973806
1/4
Werstatt Informatik II, 2000
Learning Laws: Self Adaption Equations
Graded Learning (Bewertetes Lernen)
Der korrekte Output wird dem Netzwerk nicht präsentiert, sondern muß vom Netzwerk
selbst bestimmt werden. Dem Netz wird nur zu bestimmten Zeitpunkten der Trainingsläufe
gesagt ob es gut oder schlecht klassifiziert hat. Diese Art von Netzwerk wird sehr oft für die
Ausführung von Optimierungsproblemen verwendet.
Self organized Learning (Zufälliges Lernen)
Hier erfolgt weder eine Eingabe von korrekten Outputwerten, noch Qualitätsangaben.
Obwohl diese Methode sinnlos erscheint, findet sie häufig ihre Anwendung. (zB.: Schätzen
von Dichtefunktionen, Clustern)
2. Coincidence Learning
Die Idee des zufälligen Lernens basiert auf einem 1949 erschienen Artikel des Psychologen Donald
Hebb, in welchem er einen plausiblen Mechanismus für das Lernen auf der Ebene der Gehirnzellen
veröffentlichte. Er hatte die Vorstellung (die sich später als richtig erwies), daß ein Signal, daß auf
ein Neuron trifft durch die Synapse (welche die Verbindung zwischen 2 Neuronen darstellt)
verstärkt wird damit das Neuron gleich wieder einen Impuls aussenden kann. Das Neuron ist quasi
eine Prozessoreinheit, die die Fähigkeit besitz, elektrische Signale in Abhängigkeit von der Eingabe
auszusenden.
2.1.
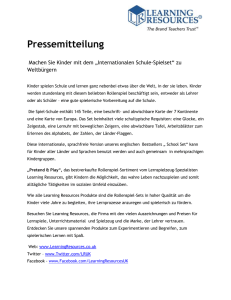
The Linear Associator
Dieses Bild zeigt eine neuronale
Netzwerkarchitektur, die man Linear
Associator nennt. Dem Netzwerk wird
n
ein Vektor x aus dem R übergeben
und das Netzwerk berechnet den
Outputvektor y durch die Formel
y W x .
(oder: lineare Abbildung aus dem
in den
Rn
Rm )
Bevor man aber y berechnen kann muß das neuronale Netz trainiert werden. Die Idee dabei ist,
daß das Netzwerk zunächst mit L Input/Outputpaaren
x1 , y1 ...xL , yL versorgt wird und auf Basis
dessen eine Gewichtsmatrix berechnet wird. Dem Netzwerk wird also gesagt „ist ein Input der
Vektor x k , dann ist der Outputvektor y = y k “.
Nun muß man eine Regel finden, damit das neuronale Netz den Output
y k mit x k assoziiert. Wie
wir aus der Formel y W x liegt die Lösung des Problems in der richtigen Wahl von W.
2.2.
Hebb´sche Lernregel
Nach dem Hebschen Lerngesetz ist
wijnew wijold yki xkj
oder in Matrixschreibweise
Gerhard Schindlauer, 8973806
2/4
Werstatt Informatik II, 2000
Learning Laws: Self Adaption Equations
W new W old yk xkT .
x k und y k bezeichnen immer ein Vektorpärchen eines Trainingslaufes. Es wird also im k-ten
Trainingslauf das Vektorpärchen xk , y k dem Netzwerk übergeben und nach diesem Trainingslauf
wird die alte Matrix W um das äußere Produkt von x k und y k erhöht.
Zu Beachten gilt es dabei folgendes:
1. Bevor der erste Trainingslauf beginnt sind alle Gewichte = 0
2. Gewichte werden nur in den Trainingsläufen geändert.
Da wir die Endmatrix nach L Trainingsläufen als Summe der äußeren Produkte dieser
Vektorpärchen der einzelnen Trainingsläufe schreiben können:
W y1 x1T y2 x2T ... yL xLT
oder
W Y * X können wir daraus schließen, daß Wx den korrekten Output liefert, wenn die Vektoren
{x1....xL} orthonormal sind. (Beweis über Kroneckerdelta). Sind die Vektoren nicht orthonormal, dann
erhält man bei der Konstruktion von y k durch Wxk einen Fehler welchen wir minimieren wollen.
T
Dazu berechnen wir einfach den MSE des Linear Associators der folgendermaßen definiert ist:
2
1 L
F (W ) y k Wx k .
L k 1
Für W YX wird dieser Fehler minimal, wobei X die Pseudoinverse Matrix von X darstellt.
Hinweis: Nicht jede Matrix hat eine Inverse. Jede Matrix hat eine Pseudoinverse.
3. Performance Learning
Lernmethoden die zum Perfomance Learning gehören, trachten danach irgendeine Funktion zu
maximieren oder minimieren. Das Ziel ist den MSE einer Kostenfunktion zu minimieren. Für diese
Lernkategorie werde ich das Widrow-Hoff Lerngesetz vorstellen. Dieses Lerngesetz stellt eines der
mächtigsten Lerngesetze dar, da es immer zum optimalen Gewichtsvektor konvergiert, egal bei
welchem Punkt man beginnt. Warum wird später erläutert. Zunächst das ADALINE.
3.1.
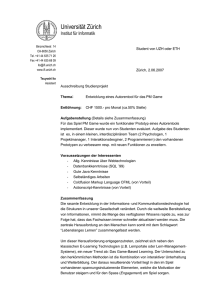
Das ADALINE (ADAptive LInear Element)
Das ADALINE ist ein einfaches
processing element dem ein Vektor x =
(x0, x1, ...xn)T übergeben wird, dann eine
reele Zahl y‘ zurückgibt und das die
Widrow-Lermethode verwendet. Auch
hier sitzt im processing element ein
Gewichtsvektor mit
w = (w0, w1, ...wn)T.
Der zurückgegebene Wert ist einfach
y‘ = wT * x.
x0 nennt man Bias Input. Er hat immer
den Wert 1!
Widrow lernen basiert auf der Idee, daß irgendein unbekannter Prozeß Vektoren x * gemäß einer
n
Wahrscheinlichkeitsfunktion vom R wählt, diesen Vektor mit dem Bias Input versieht und dem
Prozeß übergibt, dessen Output dann y ist. Unser Bestreben ist es nun einen Vektor w derart zu
generieren, daß wieder der MSE von y‘ und y minimal wird.
Gerhard Schindlauer, 8973806
3/4
Werstatt Informatik II, 2000
Learning Laws: Self Adaption Equations
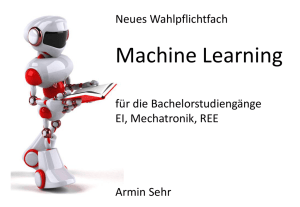
Der Versuch einer geometrischen
Veranschaulichung:
Der Vektor w definiert eine Hyperebene
im n dimensionalen Raum der von den x
Vektoren aufgespannt wird. Wenn ein
Vektor x* auf der Hyperebene liegt die
auf w normal steht, dann ist der Output
0. Alle x Vektoren die „unter“ dieser von
w definierten Hyperebene liegen, haben
einen positiven Output. Jene die „über“
dieser Ebene liegen wir der Output
negativ sein. Der Output des ADALINE
hängt linear von der Entfernung von x
zur Hyperebene w ab!
3.2.
Widrows Learning Law
Im Folgenden bezeichnet w* jenen Vektor für den der MSE minimal wird (geometrisch: Die Länge
des Vektors w wird minimal).
Nach einigen Umformungen des MSE F w E ( y k y k )
'
2
, erkennt man, daß die Abhängigkeit
von F auf w quadratisch ist. Diese quadratische Form beschreibt nun eine parabolische Oberfläche
die wie eine normale Parabel auch, einen einzigen Talpunkt hat. Manchmal kann es aber auch sein,
daß ein degeneriertes Paraboloid vorliegt. Ein solches Paraboloid hat mehrere Wellentäler, die
gottseidank alle auf der selben „Minimumhöhe“, nämlich F(w), liegen. Die Funktion findet auf alle
Fälle ihr Minimum an einem dieser Punkte.
Die Lösung den MSE zu berechnen könnte einfach darin liegen den Gradienten zu berechnen und 0
zu setzen. (Erinnerung: Der Gradient zeigt immer in die Richtung in die man gehen muß um am
schnellsten zum Maximum zu gelangen. Außer in w *, dort ist er 0). Für diese Berechnung ergeben
sich aber immense numerische Probleme.
Deshalb stellten Widrow und Hoff die Überlegung an, an irgendeiner Stelle von w (w 0) zu beginnen
und entlang des Paraboloids abwärts ins Minimum gleiten. Da wir ein Paraboloid haben, gibt es
keine lokalen Minima um die wir uns kümmern müssen. Um aber „hinunterrutschen“ zu können
mußten sie den Gradienten F schätzen. Dies erreichten sie dadurch indem sie die
Grenzwertform von F benutzten:
1N
w F w w lim yk yk'
N N k 1
2
Nachdem sie nun F geschätzt hatten, gelang es ihnen zu zeigen, daß folgendes
Gewichtsaktualisierungsgesetz immer gegen w * konvergiert egal wo man beginnt:
wk 1 wk k xk .
k y k y k'
ist dabei die Differenz von korrektem und gewünschten Outputwert und
, eine
Konstante die durch probieren gesucht wird. Der Vorgang zu finden, erfordert vom Praktiker viel
Wissen und Erfahrung. Ist nämlich zu groß konvergiert der Gewichtsvektor nicht. Ist zu klein
konvergiert w zu langsam.
Alternative Namen für diese Lernregel:
Widrow/Hoff learning law
LMS learning law (least mean square)
Delta Regel
Gerhard Schindlauer, 8973806
4/4
Werstatt Informatik II, 2000