Bearbeiten - Ihre Homepage bei Arcor
Werbung

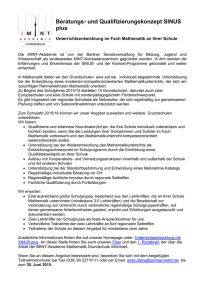
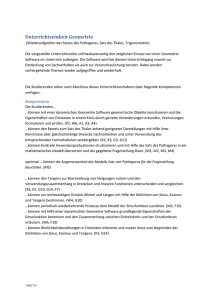
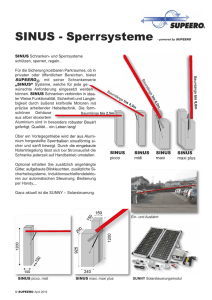
Herkunft des Namens [Bearbeiten] Die Bezeichnung „Sinus“ leitet sich von dem lateinischen „sinus“ ab, was soviel heißt wie „Bogen“ oder „Busen“. Das Wort ist mit „jiva“ aus dem Sanskrit verwandt, wo es etwa „Bogensehne“ bedeutet. Im Arabischen entwickelte sich das Wort zu „jiba“: „Tasche“ oder „Kleiderfalte“. Im Arabischen wird das Wort „jiba“ ( )بيجgleich geschrieben, wie „jaib“ ()بيج, was „Busen“ bedeutet. Die Bezeichnung „Kosinus“ entwickelte sich aus complementi sinus, also Sinus des Komplementärwinkels. Diese Bezeichnung wurde zuerst in den umfangreichen trigonometrischen Tabellen verwendet, die von Georg von Peuerbach und seinem Schüler Regiomontanus erstellt wurden [1]. Definitionen [Bearbeiten] Definition am rechtwinkeligen Dreieck [Bearbeiten] Dreieck mit einem rechten Winkel in C In einem rechtwinkligen Dreieck gilt: Der Sinus eines Winkels ist das Verhältnis der Gegenkathete (Kathete, die dem Winkel gegenüberliegt) zur Hypotenuse (Seite gegenüber dem rechten Winkel). Der Kosinus ist das Verhältnis der Ankathete (das ist jene Kathete, die einen Schenkel des Winkels bildet) zur Hypotenuse. Bei den für Dreiecke üblichen Bezeichnungen der Größen (Hypotenuse c) gilt hier: und Da aus geometrischen Gründen die Hypotenuse die längste Seite ist (denn sie liegt dem größten Winkel, also dem rechten Winkel, gegenüber), gelten auch stets sin (α) ≤ 1 und cos (α) ≤ 1. Betrachtet man statt α den gegenüberliegenden Winkel β, so wechseln beide Katheten ihre Rolle, die Ankathete von α ist die Gegenkathete von β und die Gegenkathete von α ist die Ankathete von β, es gilt also und Da im rechtwinkeligen Dreieck gilt, folgt und . Auf dieser Beziehung beruht auch die Bezeichnung Kosinus, nämlich der Sinus des Komplementärwinkels. Aus dem Satz des Pythagoras folgt die Beziehung sin2(α) + cos2(α) = 1. Im rechtwinkligen Dreieck lassen sich Sinus und Kosinus nur für Winkel zwischen 0 und 90 Grad definieren. Für beliebige Winkel ist der Sinus als y-Koordinate und der Kosinus als x-Koordinate eines Punktes am Einheitskreis (s.u.) definiert. Mittels Potenzreihendarstellung lässt sich die Definition auf komplexe Argumente verallgemeinern. Definition mit Einheitskreis [Bearbeiten] Einheitskreis Da im rechtwinkeligen Dreieck der Winkel zwischen Hypotenuse und Kathete Werte von 0 bis 90 Grad annehmen kann, sind Sinus und Kosinus zunächst nur für solche Winkel definiert. Für eine allgemeine Definition betrachtet man einen Punkt P mit den Koordinaten (x,y) auf dem Einheitskreis, also x2 + y2 = 1. Der Ortsvektor von P schließt mit der x-Achse einen Winkel α ein. Der Koordinatenursprung (0,0), der Punkt (x,0) auf der x-Achse und der Punkt P(x,y) bilden ein rechtwinkliges Dreieck. Die Länge der Hypotenuse beträgt . Die Ankathete des Winkels α ist der Vektor (x,0) der Länge x, es gilt also Die Gegenkathete des Winkels α ist der Vektor von (x,0) nach (x,y), also der Vektor (0,y) der Länge y, es gilt also Die y-Koordinate eines Punktes im ersten Quadranten des Einheitskreises entspricht also dem Sinus des Winkels zwischen seinem Ortsvektor und der x-Achse, die x-Koordinate dem Kosinus des Winkels. Setzt man diese Definition in den anderen Quadranten fort, so lassen sich Sinus und Kosinus für beliebige Winkel definieren. Für negative Winkel betrachte man die Beziehung und , aus der sich Sinus und Cosinus für den vierten Quadranten, also Winkel zwischen -90 und 0 Grad berechnen lassen. Der Sinus ist also eine ungerade Funktion, der Kosinus eine gerade. Für Winkel größer 90 Grad betrachte man die Beziehung und , aus der sich Sinus und Cosinus für den zweiten und dritten Quadranten, also Winkel zwischen 90 und 270 Grad berechnen lassen. Für Winkel kleiner -90 Grad und größer 270 Grad ergeben sich Sinus und Kosinus aus den Beziehungen und ; Sinus und Kosinus sind also periodische Funktionen mit Periode 360 Grad. Graph der Sinusfunktion Graph der Kosinusfunktion Wertebereich und spezielle Funktionswerte [Bearbeiten] Zusammenhang zwischen Sinus und Kosinus [Bearbeiten] (Satz des Pythagoras) Insbesondere folgt daraus und . Diese Ungleichung gilt aber nur für reelle Argumente α; für die über die Potenzreihe definierten komplexen Argumente können Sinus und Kosinus beliebige Werte annehmen. Verlauf des Sinus in den vier Quadranten [Bearbeiten] In den vier Quadranten ist der Verlauf der Sinusfunktion folgendermaßen: Quadran t Bogenma Bildmeng Monotoni Konvexitä Punkttyp ß e e t Gradmaß 0 Nullstelle, Wendepunk t 0 0 < x < π / positiv: 0 steigend 2 < sinx < 1 1. Quadrant π/2 1 Maximum π / 2 < x < positiv: 0 fallend π < sinx < 1 2. Quadrant π 4. Quadrant konkav Nullstelle, Wendepunk t 0 negativ: − π < x < 3π 1 < sinx < fallend /2 0 3. Quadrant konkav 3π / 2 −1 3π / 2 < x < 2π negativ: − 1 < sinx < steigend 0 konvex Minimum konvex Für Argumente außerhalb dieses Bereiches erhält man den Wert des Sinus daraus, dass der Sinus periodisch mit der Periode 360° (bzw. 2π rad) ist, d. h. Außerdem gilt . Verlauf des Kosinus in den vier Quadranten [Bearbeiten] Der Kosinus ist ein um 90° (bzw. π/2 rad) phasenverschobener Sinus, es gilt . . In den vier Quadranten ist der Verlauf der Kosinusfunktion daher folgendermaßen: Quadran t Gradmaß Bogenma Bildmeng Monotoni Konvexitä Punkttyp ß e e t 0 1. Quadrant 0 < x < π / positiv: 0 fallend 2 < cosx < 1 π/2 2. Quadrant 4. Quadrant Maximum konkav Nullstelle, Wendepunk t 0 negativ: − π/2<x< 1 < cosx < fallend π 0 π 3. Quadrant 1 konvex −1 negativ: − π < x < 3π 1 < cosx < steigend /2 0 3π / 2 0 3π / 2 < x < 2π positiv: 0 steigend < cosx < 1 Minimum konvex Nullstelle, Wendepunk t konkav Für Argumente außerhalb dieses Bereiches erhält man den Wert des Kosinus daraus, dass der Kosinus so wie der Sinus periodisch mit der Periode 360° (bzw. 2π rad) ist, d. h. . Außerdem gilt Wichtige Funktionswerte [Bearbeiten] . Winkel α 0π π Sinus Kosinus nicht definiert Tangens nicht definiert Weitere mit Quadratwurzeln angebbare Funktionswerte [Bearbeiten] Über die Berechnung der fünften Einheitswurzeln mittels einer quadratischen Gleichung erhält man Mit Hilfe der Additionstheoreme kann man viele weitere solche Ausdrücke berechnen: erhält man aus . Aus und , lassen sich dann z. B. und dann rekursiv auch alle berechnen. Generell gilt, dass und zumindest dann explizit mit den Grundrechenarten und Quadratwurzeln darstellbar sind, wenn der Winkel mit Zirkel und Lineal konstruierbar ist, insbesondere also wenn und die für ist von der Gestalt ist, wobei , Fermatsche Primzahlen sind [2]. In obigem Beispiel von und der Nenner gleich Umkehrfunktion [Bearbeiten] Da sich zu einem gegebenen Wert vierten Quadranten und zu einem gegebenen Wert ein passender Winkel im ersten oder ein passender Winkel im ersten oder zweiten Quadranten konstruieren lässt, folgt aus diesen geometrischen Überlegungen, dass die Funktionen und eine Umkehrfunktion besitzen. Diese Umkehrfunktionen bzw. werden Arkusfunktionen genannt. Der Name rührt daher, dass sich deren Wert nicht nur als Winkel, sondern auch als Länge eines Kreisbogens (Arcus bedeutet Bogen) interpretieren lässt; für diese Interpretation ist die Angabe des Wertebereichs im Bogenmaß bzw. üblich. Eine andere Interpretation des Wertes als doppelter Flächeninhalt des dazugehörigen Kreissektors am Einheitskreis ist ebenfalls möglich; diese Interpretation ist insbesondere für die Analgoie zwischen Kreis- und Hyperbelfunktionen nützlich. Für die Arkusfunktionen gelten unter anderem folgende Formeln: , denn für gilt , denn für gilt . und . , denn für und gilt . , denn für und Stetigkeit [Bearbeiten] Da die Sinusfunktion gilt . und und die Kosinusfunktion monoton, surjektiv und invertierbar sind, folgt, dass sie in diesen Quadranten stetig sind. Da die Funktionen in den anderen Quadranten lediglich gespiegelt bzw. periodisch fortgesetzt sind, sind die Sinus- und Kosinusfunktion für alle reellen Argumente stetig. Zusammenhang mit dem Skalarprodukt [Bearbeiten] Der Kosinus steht in enger Beziehung mit dem Skalarprodukt zweier Vektoren und : , das Skalarprodukt ist also die Länge der Vektoren multipliziert mit dem Kosinus des eingeschlossenen Winkels. In endlichdimensionalen Räumen lässt sich diese Beziehung aus dem Kosinussatz ableiten. In abstrakten Vektorräumen mit innerem Produkt wird über diese Beziehung der Winkel zwischen Vektoren definiert. Additionstheoreme [Bearbeiten] Aus dem Skalarprodukt lassen sich die sogenannten Additionstheoreme herleiten: Die Vektoren und Winkel α − β ein; mit dem Skalarprodukt folgt also der Länge 1 schließen den . Die Vektoren und den Winkel α + β ein; mit dem Skalarprodukt folgt also der Länge 1 schließen . Aus und erhält man die Additionstheoreme für den Sinus: sowie . Setzt man in diesen Beziehungen u = α + β und v = α − β (beziehungsweise und ), so erhält man durch Addition bzw. Subtraktion je zweier Additionstheoreme , , und . Weitere Identitäten finden sich in der Formelsammlung Trigonometrie. Ableitung (Differentiation) und Integration von Sinus und Kosinus [Bearbeiten] Differentiation [Bearbeiten] Wird im Bogenmaß angegeben, so gilt für die Ableitung der Sinusfunktion [3] Aus und der Kettenregel erhält man die Ableitung des Kosinus: und daraus die zweite Ableitung des Sinus: . Die dritte Ableitung ist daher . und die vierte Ableitung ist wieder die Sinusfunktion selbst: . In weiterer Folge erhält man daraus für die 4n + k-te Ableitung des Sinus und für die 4n + k-te Ableitung des Kosinus Wird der Winkel α in Grad gemessen, so kommt nach der Kettenregel bei jeder Ableitung ein Faktor dazu, also beispielsweise . Um diese störenden Faktoren zu vermeiden, wird in der Analysis der Winkel ausschließlich im Bogenmaß angegeben; die Angabe von Winkel in Grad ist allerdings anschaulicher und daher bei geometrischen Überlegungen zweckmäßiger. Das Integral von Sinus und Cosinus lässt sich leicht mit der folgenden Skizze merken: +Sinus -Cosinus +Cosinus -Sinus Man schreibt den +Sinus oben auf ein Blatt Papier und ergänzt auf der gegenüberliegenden Seite -Sinus; man schreibt den +Cosinus rechts auf das Blatt Papier und ergänzt auf der gegenüberliegenden Seite -Cosinus. Liest man mit dem Uhrzeigersinn, kommt man bei der jeweiligen Ableitung aus; liest man gegen den Uhrzeigersinn, kommt man beim jeweiligen Integral aus. So entspricht z. B. die Ableitung von -Sinus dem -Cosinus. So entspricht z. B. das Integral des -Sinus dem +Cosinus. Integration [Bearbeiten] Aus den Ergebnissen über die Ableitung ergibt sich unmittelbar die Stammfunktion von Sinus und Kosinus im Bogenmaß: Analytische Definition [Bearbeiten] Obige Definitionen des Sinus und des Kosinus beinhalten geometrische Überlegungen. Geometrie wird häufig naiv-intuitiv und nicht auf axiomatischer Basis behandelt. Sinus und Kosinus spielen aber auch eine wichtige Rolle in der Analysis, in der ein viel formalerer Zugang zweckmäßig ist. Daher sind die geometrischen Definitionen für die Analysis nicht ausreichend, und es wird eine analytische Definition benötigt. Auf Basis einer streng formalisierten Geometrie lässt sich zwar die Äquivalenz der geometrischen und der analytischen Definition zeigen; auf Basis einer naiven Geometrie sind die geometrischen Überlegungen allerdings lediglich als Heuristik zur Begründung der analytischen Definition zu betrachten. Die analytische Definition erlaubt zusätzlich die Erweiterung auf komplexe Argumente. Sinus und Kosinus als komplexwertige Funktion aufgefasst sind holomorph und surjektiv. Für die analytische Definition gibt es in der Literatur keinen einheitlichen Zugang; es sind mehrere äquivalente Varianten verbreitet. In jeder dieser Varianten ist der Winkel im Bogenmaß; bei Angabe des Winkels in Grad würden störende Faktoren dazukommen. Definition als Taylorreihe [Bearbeiten] Mit Hilfe der aus geometrischen Überlegungen berechneten Ableitung des Sinus gilt für die 4n + k-te Ableitung an der Stelle 0 Daraus ergibt sich folgende Taylorreihenentwicklung um x=0: Für die aus geometrischen Überlegungen berechneten Ableitung des Kosinus gilt für die 4n + k-te Ableitung an der Stelle 0 Daraus ergibt sich folgende Taylorreihenentwicklung um x=0: Mit dem Quotientenkriterium lässt sich zeigen, dass diese Potenzreihen für jede komplexe Zahl x absolut und in jeder beschränkten Teilmenge der komplexen Zahlen gleichmäßig konvergieren. Diese unendlichen Reihen verallgemeinern also die Definition des Sinus und des Kosinus von reellen auf komplexe Argumente. In der Analysis werden die Sinusfunktion und die Kosinusfunktion häufig mittels dieser Reihenentwicklung definiert. Auch π wird dort üblicherweise nicht geometrisch, sondern beispielsweise über diese Reihe und die Beziehung als das Doppelte der kleinsten positiven Nullstelle der Kosinusfunktion definiert. Für kleine Werte zeigen diese Reihen ein sehr gutes Konvergenzverhalten. Zur numerischen Berechnung kann man daher die Periodizität und Symmetrie der Funktionen ausnutzen und den x-Wert bis auf den Bereich -π/4 bis π/4 reduzieren (siehe Reduktionsformel). Danach sind für eine geforderte Genauigkeit nur noch wenige Glieder der Reihe zu berechnen. Das Taylorpolynom der Kosinusfunktion bis zur vierten Potenz z.B. hat im Intervall [-π/4, π/4] einen relativen Fehler von unter 0,05%. Im Artikel Taylor-Formel sind einige dieser so genannten Taylorpolynome grafisch dargestellt und eine Näherungsformel mit Genauigkeitsangabe angegeben. Zu beachten ist allerdings, dass die Teilsummen der Taylorpolynome nicht die bestmögliche numerische Approximation darstellen; beispielsweise in Abramowitz-Stegun finden sich Näherungspolynome mit noch kleinerem Approximationsfehler.[4] Beziehung zur Exponentialfunktion [Bearbeiten] Die trigonometrischen Funktionen sind eng verbunden mit der Exponentialfunktion. Dieser Ansatz führt zum einen Sinus und Kosinus auf nur eine Reihe zurück, und ist aus der Eulerformel . motiviert. Für eine reelle Zahl der komplexen Zahl . ist also der Realteil und Für beliebige komplexe Zahlen z definiert man dann der Imaginärteil und Man kann aber auch den Sinus wie oben als Taylorreihe definieren und dann die Übereinstimmung mit dieser Definition zeigen. Ausgehend von dieser Definition lassen sich sehr leicht die Eigenschaften des Sinus und die Additionstheoreme des Sinus und Kosinus nachweisen. Definition über analytische Berechnung der Bogenlänge [Bearbeiten] Die Definition des Sinus und Kosinus als Taylorreihe liefert keinen analytischen Beweis der Differenzierbarkeit des Sinus und Kosinus, sondern setzt die Differenzierbarkeit letztlich axiomatisch voraus. Die Definition mit Hilfe der Exponentialfunktion hat das selbe Problem, versteckt es allerdings im Beweis der Eulerformel. Ein echter analytischer Beweis der Differenzierbarkeit des Sinus und Kosinus erfordert, dass die geometrische Definition des Sinus und Kosinus zuerst analytisch formalisiert wird. Dies ist möglich, indem man den Einheitskreis beispielsweise als parametrisiert. Die Länge dieser Kurve wird auch als Bogenlänge bezeichnet und berechnet sich als Wie leicht zu zeigen ist, ist ungerade, stetig, streng monoton wachsend und beschränkt. Da die gesamte Bogenlänge dem Kreisumfang entspricht, folgt, dass das Supremum von gleich definiert. ist; wird bei dieser Vorgangsweise also analytisch als Supremum von Die Funktion ist auch differenzierbar: . Weil sie stetig und streng monoton wachsend ist, ist sie auch invertierbar, und für die Umkehrfunktion gilt . Mit Hilfe dieser Umkehrfunktion lassen sich nun Sinus und Kosinus als - und Komponente von analytisch definieren: sowie . Aus der Quotientenregel und der Kettenregel folgen dann sowie . Bei dieser Definition des Sinus und Kosinus über die analytische Berechnung der Bogenlänge werden die geometrischen Begriffe tatsächlich sauber formalisiert. Sie hat allerdings den Nachteil, dass im didaktischen Aufbau der Analysis der Begriff der Bogenlänge erst sehr spät formal eingeführt wird und daher Sinus und Kosinus erst relativ spät verwendet werden können. Definition als Lösung einer Funktionalgleichung [Bearbeiten] Eine anderer analytischer Zugang ist, Sinus und Kosinus als Lösung einer Funktionalgleichung zu definieren, die im Wesentlichen aus den Additionstheoremen besteht: Gesucht ist ein Paar stetiger Funktionen Gleichungen , das für alle die und erfüllt. Die Lösung definiert dann den Sinus, die Lösung den Kosinus. Um Eindeutigkeit zu erreichen, sind einige Zusatzbedingungen zu erfüllen. In Heuser, Lehrbuch der Analysis, Teil 1 wird zusätzlich gefordert, dass eine ungerade Funktion, eine gerade Funktion, , und gilt. Bei diesem Zugang wird offensichtlich die Differenzierbarkeit des Sinus vorausgesetzt; wird in weiterer Folge analytisch als das doppelte der kleinsten positiven Nullstelle des Kosinus definiert. Verwendet man den Zugang von Leopold Vietoris[5] und berechnet die Ableitung des Sinus aus den Additionstheoremen, so ist es zweckmäßiger, auf geeignete Weise analytisch (beispielsweise als Hälfte des Grenzwerts des Umfangs des dem Einheitskreis engeschriebenen -Ecks) zu definieren und dann die Differenzierbarkeit der Lösung dieser Funktionalgleichung zu beweisen. Als Zusatzbedingung zu den Additionstheoremen fordert man dann beispielsweise , , und für alle . Unter den getroffenen Voraussetzungen ist die Eindeutigkeit der Lösung der Funktionalgleichung relativ einfach zu zeigen; die geometrisch definierten Funktionen Sinus und Kosinus lösen auch offensichtlich die Funktionalgleichung. Die Existenz einer Lösung lässt sich analytisch beispielsweise nachweisen, indem man zeigt, dass die Taylorreihen von Sinus und Kosinus oder eine andere der oben verwendeten analytischen Darstellungen von Sinus und Kosinus die Funktionalgleichung tatsächlich lösen. Produktentwicklung [Bearbeiten] ist dabei im Bogenmaß zu nehmen. Anwendungen [Bearbeiten] Geometrische Anwendungen [Bearbeiten] Skizze zum Beispiel Mit der Definition des Sinus können auch im nicht rechtwinkligen Dreieck Größen, speziell die Höhen, berechnet werden; ein Beispiel ist die Berechnung von hc im Dreieck DBC bei gegebener Länge a und Winkel β: Andere wichtige Anwendungen sind der Sinussatz und der Kosinussatz. Fourierreihen [Bearbeiten] Im Hilbertraum der auf dem Intervall bezüglich des Lebesgue-Maßes quadratisch integrierbaren Funktionen bilden die Funktionen ein vollständiges Orthogonalsystem, das sogenannte trigonometrische System. Daher lassen sich alle Funktionen als Fourierreihe darstellen, wobei die Funktionenfolge in der L2-Norm gegen konvergiert. Physikalische Anwendungen [Bearbeiten] In der Physik werden Sinus- und Kosinusfunktion zur Beschreibung von Schwingungen verwendet. Insbesondere lassen sich durch die oben erwähnten Fourierreihen beliebige Signale als Summe von Sinus- und Kosinusfunktionen darstellen, siehe Fourieranalyse