Vorlesung_SPS-Steuerung
Werbung

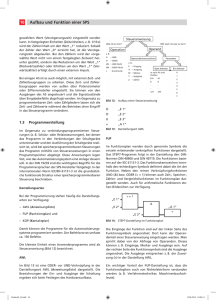
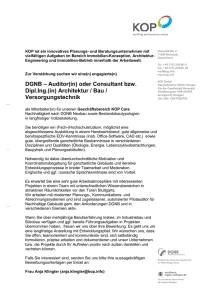
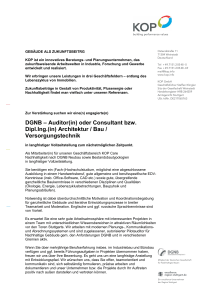
Prof. Dr.-Ing. Cihat Karaali Fachbereich SciTec 1. SPS-Steuerungen In der automatisierten Steuerungstechnik unterscheidet man zwischen verbindungsprogrammierten und speicherprogrammierbaren Steuerungen. Verbindungsprogrammierte Steuerung Speicherprogrammierbare Steuerung Sind alle Schaltelemente ein- und ausgangsseitig aufgabengemäß miteinander verdrahtet, so ist diese Steuerungsart verbindungsprogrammiert. Bei jeder nachträglichen Änderung der Steuerungsfunktion jedoch muß der gesamte Aufbau der Steuerschaltung und damit deren Verdrahtung zwangsläufig geändert werden. Dies ist vor allem bei umfangreichen Steuerungen sehr mühsam und zeitaufwendig. Die aufgabengemäß fixierte Funktion der Schaltung liegt bei speicherprogrammierbaren Steuerungen durch ein „Programm“ fest. Bei den vorgesehenen nachträglichen Änderungen bleibt der Aufbau der Schaltung erhalten, d.h. die für die Steuerung erforderlichen Geber und die zu steuernde Stellglieder bleiben am Automatisierungsgerät angeschlossen. Es wird nur noch der Inhalt des Programmspeichers umgeschrieben. Damit ist der Vorteil dieser Steuerungsart gegenüber der vorhergehenden offensichtlich. 1 Das Automatisierungsgerät verfügt über Prozessor, Programmspeicher und Ein/Ausgabeeinheiten. Das Anwenderprogramm wird am Programmiergerät erstellt und im Programmspeicher abgelegt. Der Prozessor bearbeitet das Speicherprogramm und überprüft sequentiell die Zustände des Signalgebers. Abhängig von den Signalzuständen am Eingang werden die zu steuernde Stellglieder am Ausgang programmgemäß ein- und ausgeschaltet. Jedes Bit verfügt über eine Nummer, die als Bit-Adresse definiert ist. Im Eingangsbyte (eine Bitfolge aus 8 Bits) hat das Bit rechts außen die Bit-Adresse 0 und das Bit links außen die Bit-Adresse 7.Die Signalzustände am Eingang werden im Eingangsbyte EB2 mit der Byte-Adresse 2 zugeordnet (Beispiel oberes Bild). Bei der 2 Bezeichnung eines Eingangs oder Ausgangs folgt auf das Kennzeichen E bzw. A die Byte-Adresse und anschließend nach einem Punkt die Bit-Adresse (z.B. E 2.6 oder A 3.0). Die Byte- und die Bit-Adresse kennzeichnen allgemein jeden Ein- und Ausgang in der Ein- und Ausgabeeinheit. PROGRAMMIERSPRACHEN Funktionsplan (FUP) Kontaktplan (KOP) Anweisungsliste (AWL) Das Programmiergerät dient dazu das Anwenderprogramm einzugeben, das geschriebene Programm zu übersetzen und es in den Programmspeicher zu übertragen. Wichtig ist dabei, dass bevor der Anwender sein Programm am Programmiergerät eintippt, den einzelnen Gebern am Eingang und Stellgliedern am Ausgang, Eingänge und Ausgänge in den Ein- und Ausgabeeinheiten am Automatisierungsgerät zuordnet. Die Programmiersprachen lassen sich in drei Darstellungsarten Kontaktplan (KOP), Funktionsplan (FUP) und Anweisungsliste (AWL). eingeben: Das folgende Beispiel zeigt das SPS-„Programmieren“ am Programmiergerät in drei Programmiersprachen. Aufgabenstellung: Der vorgegebene Stromlaufplan einer Schützsteuerung soll in drei SPS-Programmiersprachen umgesetzt werden. 3 Stromlaufplan Für den oben angegebenen Stromlaufplan wird das SPS-Programm in drei Darstellungsarten wie folgt umgesetzt: Funktionsplan (FUP): Hier handelt es sich um normgeführte Symbole, die laut Aufgabenstellung miteinander verknüpft sind. Nach der Analyse des Stromlaufplans entsprichen dort die Reihenschaltung der betroffenen Schalter einer UND- und die Parallelschaltung einer ODER-Verknüpfung im Funktionsplan. E 1.0 bis E 1.5 stellen die Funktion der Geberanschlüsse und A 3.0 die der Stellglieder dar. Sie werden als Adressen der Ein- und Ausgänge deklariert. Der Kontaktplan (KOP): Die Struktur des Kontaktplans ähnelt der des Stromlaufplans mit dem Unterschied der waagerechten Lage der einzelnen Strompfade. Die symbolischen Darstellungen im Kontaktplan | | kennzeichnen einen Eingang und ( ) einen Ausgang. Die Adressen der Ein- und Ausgänge werden über jedem Symbol angegeben. 4 Die Anweisungsliste (AWL): Die Anweisungsliste besteht aus sequentiell zu behandelnde Steuerungsanweisungen als Programm in der Form, wie sie auch im Programmspeicher steht. Diese anwenderspezifische Steuerungsanweisungen werden durch den Prozessor sequentiell abgearbeitet. Bevor das Programm durchläuft, überprüft der Prozessor den Signalzustand von Eingängen (E 1.0 bis E 1.5). Eine Steuerungsanweisung (z.B. U E 1.4) besteht aus einem Operationsteil U (für UND-Verknüpfung) und einem Operandenteil E 1.4. Der Operationsteil deutet hin was zu tun ist. Der Operandenteil beantwortet die Frage „womit es zu tun ist?“ Der Operandenkennzeichen E, A beschreiben einen Eingang oder Ausgang. Mit dem Parameter 1.4 wird die Byteadresse 1 und die Bitadresse 4 des Eingangs- oder Ausgangsregisters deklariert. Damit beschreibt man die Anweisung U E1.4 wie folgt: UND-Verknüpfung von Eingangsbyte 1, Bit 4. Die AWL für den vorgegebenen Stromlaufplan lautet dann: U E 1.0 U E 1.1 O U E 1.2 U E 1.3 U E 1.4 = M 1.0 U M 1.0 U E 1.5 = A 3.0 Auf Anweisungen mit Verknüpfungen folgt zum Schluß eine Anweisung, bei deren Bearbeitung das Ergebnis aus der vorher bearbeiteten Anweisungen bestimmt (=M 1.0 für Merker Byte 1 Bit 0 oder =A 3.0 Ausgangsbyte 3 Bit 0). Die Zwischenergebnisse können mit Merkern gebildet werden. Hierbei werden Merkern ähnlich wie Ausgängen logische Signalzustände zugewiesen. 5 Beispiel: Der Ausgang A 2.0 einer Anlage soll nur dann auf einen Signalzustand „1“ schalten, wenn ein einziger Eingang von drei zur Verfügung stehenden Eingängen (E 1.0, E 1.1 und E 1.2) mit dem Signalzustand „1“ belegt werden (Antivalenz). Gesucht sind die Umsetzungen in FUP, KOP und AWL. FUP: KOP: 6 AWL: UN E 1.0 UN E 1.1 U E 1.2 O UN E1.0 U E 1.1 UN E 1.2 O U E 1.0 UN E 1.1 UN E 1.2 =A 2.0 Literaturhinweise: Wellenreuther/Zastrow: Automatisierung mit SPS Siemens: SIMAIC S5/S7 M. Kantel, B. Plagemann, T. Schwer, R. Speidel: Der Funktionsplan K. H. Borelbach, G. Kraemer und E. Nows: Steuerungstechnik mit speicherprogrammierten Steuerungen SPS 7