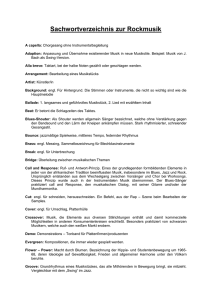
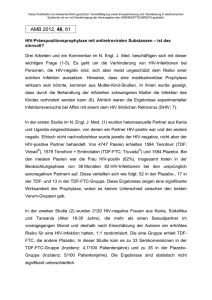
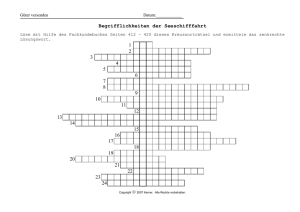
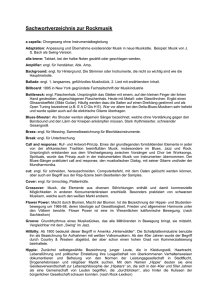
Lehrstuhl für Mechatronik Prof. Dr.-Ing. D. Schramm Merkblatt zur Vorlesung Fahrdynamik SS 2005 Seite 1 Definitionen aus der Fahrzeugdynamik Ortsfestes Koordinatensystem (XE , YE , ZE ) [engl.: earth-fixed axis system]: Rechtwinkliges Rechtssystem, das an den Ort gebunden ist. Die XE - und YE -Achsen liegen in einer Horizontalebene (=Fahrbahnebene) und die ZE -Achse ist nach oben gerichtet. Horizontiertes Koordinatensystem (X, Y, Z) [engl.: intermediate axis system]: Rechtwinkliges Rechtssystem, dessen XY -Ebene in der XE YE -Ebene liegt. Die X-Achse ist die Projektion der XV -Achse auf die XE YE -Ebene und die Z-Achse zeigt nach oben. Fahrzeugfestes Koordinatensystem (XV , YV , ZV ) [engl.: vehicle axis system]: Rechtwinkliges Rechtssystem mit einem beliebigen Koordinatenursprung im Fahrzeug (üblicherweise im Schwerpunkt) so, dass die XV -Achse in jedem Fall waagerecht und nach vorne gerichtet ist, und sich in der Fahrzeuglängsmittelebene befindet. Die YV -Achse steht senkrecht auf der Fahrzeuglängsmittelebene und zeigt nach links, die ZV -Achse zeigt nach oben. Anmerkung: Die Winkellage des fahrzeugfesten Koordinatensystems (XV , YV , ZV ) bezogen auf das ortsfeste Koordinatensystem (XE , YE , ZE ) ergibt sich aus der Reihenfolge von drei Drehungen. Gierwinkel ψ [engl.: yaw angle]: Winkel (XE , X), der sich aus einer Drehung um die ZE -Achse ergibt. Nickwinkel θ [engl.: pitch angle]: Winkel (X, XV ), der sich aus einer Drehung um die Y -Achse ergibt. Wankwinkel ϕ [engl.: roll angle]: Winkel (Y, YV ), der sich aus einer Drehung um die XV -Achse ergibt. Radfestes Koordinatensystem (XW , YW , ZW ) [engl.: wheel axis system]: Rechtwinkliges Rechtssystem, dessen XW YW -Ebene in der XE YE -Ebene liegt. Die XW Achse ist die Schnittlinie der Radebene mit der XE YE -Ebene und zeigt nach vorn. Die ZW -Achse zeit nach oben und der Ursprung liegt im Radaufstandspunkt. Radmittelebene [engl.: wheel plane]: Mittelebene der Radfelge senkrecht zur Raddrehachse. Radmittelpunkt [engl.: wheel centre]: Schnittpunkt der Raddrehachse mit der Radmittelebene. Radaufstandspunkt [engl.: centre of tyre contact]: Schnittpunkt der Radmittelebene mit der vertikalen Projektion der Raddrehachse auf die Fahrbahnebene. Spreizung σ [engl.: kingpin inclination angle]: Winkel zwischen der Z-Achse un der Lenkachse projiziert auf die Y Z-Ebene. Sie ist positiv, wenn die Lenkachse oben nach innen geneigt ist. Lehrstuhl für Mechatronik Prof. Dr.-Ing. D. Schramm Merkblatt zur Vorlesung Fahrdynamik SS 2005 Seite 2 Lenkrollradius/Lenkrollhalbmesser rσ [engl.: transverse offset at ground ]: Projektion des Lenkhebelarmes in der Fahrbahnebene r auf die YW -Achse des radfesten Koordinatensystems. Er ist positiv, wenn der Radaufstandspunkt außerhalb des Schnittpunkts von Lenkachse und Fahrbahnebene liegt. Nachlaufwinkel τ [engl.: castor angle]: Winkel zwischen der Z-Achse und der Projektion der Lenkachse auf die XZ-Ebene. Er ist positiv, wenn das obere Ende der Lenkachse nach hinten geneigt ist. Nachlaufstrecke rτ [engl.: castor offset]: Projektion des Lenkhebelarmes in der Fahrbahnebene r auf die XW -Achse des radfesten Koordinatensystems. Sie ist positiv, wenn der Radaufstandspunkt hinter dem Schnittpunkt von Lenkachse und der Fahrbahn liegt. Sturzwinkel εv [engl.: camber angle]: Der Winkel zwischen Z-Achse und Radmittelebene. Er ist positiv, wenn die Oberseite des Rades in Bezug zum Fahrzeugaufbau nach außen geneigt ist. Spurweite b [engl.: track ]: Abstand zwischen den Radaufstandspunkten der beiden Räder einer Achse auf die Y ZEbene projiziert. Bei Zwillingsrädern ist dies der Abstand zwischen den Punkten, die in der Mitte zwischen den Radaufstandspunkten beider Zwillingsradeinheiten liegen. Anmerkung: Radstand und Spurweite bleiben im Regelfall nicht konstant. Radstand l [engl.: wheelbase]: Abstand zwischen den Radaufstandspunkten der beiden Räder auf der gleichen Seite des Fahrzeugs auf die X-Achse projiziert. Anmerkung: Bei Fahrzeugen mit mehr als zwei Achsen werden die Radstände zwischen hintereinanderliegenden Rädern (vom vordersten zum hintersten Rad) angegeben. Der Gesamtradstand (rechts oder links) ist die Summe dieser Abstände. Statischer Vorspurwinkel δV,0 [engl.: static toe angle]: Winkel, der sich im statischen Bezugszustand zwischen der Fahrzeuglängsmittelebene und der Schnittlinie der Radmittelebene eines Rades mit der Fahrbahnebene ergibt. Er ist positiv, wenn der vordere Teil des Rades der Fahrzeuglängsmittelebene zugekehrt ist, und negativ (Nachspurwinkel), wenn der vordere Teil von ihr abgekehrt ist. Schwimmwinkel β [engl.: sideslip angle]: Winkel zwischen der X-Achse und der Richtung der Horizontalgeschwindigkeit, der sich aus einer Drehung um die Z-Achse ergibt. Radlenkwinkel δ [engl.: steer angle]: Winkel zwischen X-Achse und XW -Achse. Er ist bei positiver Drehung um die ZW -Achse positiv. Ackermannwinkel δA [engl.: Ackermann steer angle]: Winkel, dessen Tangens der Radstand dividiert durch den Bahnradius der Hinterachsmitte bei sehr niedriger Fahrzeuggeschwindigkeit ist. Anmerkung: Bei mehr als einer Hinterachse kann diese Hinterachsmitte nicht geometrisch festgelegt werden. Eigenlenkverhalten/Eigenlenkgradient [engl.: understeer gradient]: Vergleich des Lenkungswinkels am Lenkrad bei Kurvenfahrt mit dem Lenkungswinkel, der zur Einstellung des Ackermann-Lenkwinkels an den Rädern erforderlich ist; die Be- Lehrstuhl für Mechatronik Prof. Dr.-Ing. D. Schramm Merkblatt zur Vorlesung Fahrdynamik SS 2005 Seite 3 trachtung des Eigenlenkverhaltens geht davon aus, dass bei Kurvenfahrten mit der Geschwindigkeit nahe null die Räder ohne Schräglauf in Richtung der Spur der Radebene auf der Fahrbahn abrollen und sich der Kreismittelpunkt der Kurve auf der verlängerten Hinterachse befindet. Neutrales Lenkverhalten [engl.: neutral steer ]: Lenkeigenschaft bei stationärem Gleichgewicht, wobei der Eigenlenkgradient null ist. Untersteuern [engl.: understeer ]: Lenkeigenschaft bei stationärem Gleichgewicht, wobei der Eigenlenkgradient positiv ist. Übersteuern [engl.: oversteer ]: Lenkeigenschaft bei stationärem Gleichgewicht, wobei der Eigenlenkgradient negativ ist. Lenkradwinkel δH [engl.: steering-wheel angle]: Verdrehwinkel des Lenkrades gemessen aus der Geradeausstellung. Er ist bei Linkskurve des Fahrzeugs positiv. Lenkübersetzung iS [engl.: overall teering ratio]: Verhältnis der Änderung des Lenkradwinkels bei gegebener Lenkradstellung in Bezug auf die Änderung des durchschnittlichen Lenkwinkels eines gelenkten Radpaares bei unbelastetem Lenksystem und statischen Bezugszustand des Fahrzeuges. Lenkradmoment MH [engl.: steering-wheel torque]: Das vom Fahrer am Lenkrad um dessen Drehachse aufgebrachte Drehmoment. Es ist bei Linkskurve des Fahrzeugs positiv. Schräglaufwinkel α [engl.: slip angle]: Winkel von der XW -Achse zur Tangente der Bahnkurve des Radaufstandspunktes. Er ist positiv nach links. Seitenkraft am Rad FY,W [engl.: lateral force at wheel ]: Komponente der Bodenreaktionskraft in Richtung der YW -Achse. Seitenkraft-Schräglaufwinkel-Gradient [engl.: cornering stiffness]: ∂FY,W − ∂α Anmerkung: Der Seitenkraft-Schräglaufwinkel-Gradient wird in der Regel bei Schräglaufwinkel null bestimmt. Seitenkraft-Radsturzwinkel-Gradient [engl.: camber stiffness]: ∂FY,W − ∂εW Anmerkung: Der Seitenkraft-Radsturzwinkel-Gradient wird in der Regel bei Radsturzwinkel null bestimmt. Rückstellmoment am Rad MZ,W [engl.: aligning moment]: Komponente des Bodenreaktionsmoments in Richtung der YW -Achse. Anmerkung: Dies ist in der Regel ein Korrekturmoment, das als selbstausrichtendes“ ” Moment bezeichnet wird.