Vorl-6-Schwellwertoperatoren&Texturen
Werbung

Schwellwertverfahren
Sollen Bilder in kleinere Farbräume konvertiert werden,
ergibt sich das Problem der Bestimmung adäquater
Schwellwerte. Eine klassische Aufgabe ist die
Binarisierung eines Grauwertbildes.
Typische Schwellwerte können aus dem
Grauwerthistogramm eines Bildes gewonnen werden:
Mittelmäßiger Grauwert
Grauwertmedian
Hauptsenken (zentralste relative Extremstellen des
Grauwerthistogramms)
Maximum-Entropie-Schwellwert
Ziel einer Filterung ist im Allgemeinen eine
Verbesserung eines Musters.
Im Einzelnen kann dies eine Reduktion
störender Anteile, oder eine Hervorhebung
informativer Anteile bzw. die Restaurierung eines
idealen Musters sein.
Die Abbildung welche ein gegebenes Bild auf ein
Ausgabebild abbildet, heißt Transformation.
Ein wichtiges Unterscheidungsmerkmal von
Transformationen ist ihre mathematische Beschaffenheit.
Eine Transformation
heißt Lineares System wenn für
alle Funktionen
und alle Skalare
gilt:
1-dimensional:
2-dimensional:
Die bilaterale Z-Transformation eines Signals x[n] ist die formale Reihe X(z):
wobei n alle ganzen Zahlen durchläuft und z, im Allgemeinen, eine komplexe Zahl
der Form
ist. A ist der Betrag von z und φ der Winkel der komplexen Zahl in Polarkoordinaten.
Alternativ kann z auch als Realteil σ und Imaginärteil ω beschrieben werden.
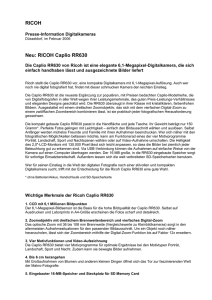
In der digitalen Bildverarbeitung bezeichnet eine
Nachbarschaft eine kleine, definierte Bildregion um ein
Pixel. Viele Bildverarbeitungsoperationen betrachten die Pixel
innerhalb einer Nachbarschaft, um für ihren Mittelpunkt einen
neuen Farb- oder Grauwert zu berechnen.
Mit der Vierer-Nachbarschaft (auch D-Nachbarschaft) und
der Achter-Nachbarschaft existieren zwei grundlegende
Nachbarschaftskonzepte.
Jedes Pixel P eines Bildes hat vier horizontale und vertikale
Nachbarn D. Diese direkten Nachbarn zeichnen sind
dadurch aus, dass sie mit P jeweils eine Pixelkante
gemeinsam haben. Sie werden als D-Nachbarn oder 4Nachbarn bezeichnet.
Nimmt man die Koordinaten von P mit (x,y) an, so sind die
Koordinaten der vier D-Nachbarn durch
◦ (x − 1, y),(x, y − 1),(x, y + 1),(x + 1, y)
gegeben. Jeder D-Nachbar ist von P genau eine Einheit
entfernt.
Die Menge, die den Punkt P und seine Nachbarn D enthält,
heißt Vierer-Nachbarschaft. Eine Vierer-Nachbarschaft besteht
also aus fünf Punkten . Sie wird üblicherweise mit N4(P)
bezeichnet.
Die
Menge, die den Punkt P und seine
Nachbarn D und N enthält, heißt AchterNachbarschaft.
Eine Achter-Nachbarschaft besteht also aus
neun Punkten (siehe nextstehende Abbildung).
Sie wird mit N8(P) oder oft auch ganz einfach
mit NP bezeichnet.
Wenn in der Bildverarbeitung von einer Nachbarschaft
die Rede ist und im konkreten Anwendungsfall nicht
explizit auf die Verwendung einer Vierer- oder anderen
Nachbarschaft hingewiesen wird, so findet in der Regel
eine Achter-Nachbarschaft Anwendung.
Die Größe und Form einer Nachbarschaft hängt immer vom
Anwendungsfall ab. Für viele Operatoren ist eine
quadratische Form nxn mit n = 3,5,7… üblich.
Abweichend davon kann eine Nachbarschaft beispielsweise
auch nach der Manhattan-Metrik mit maximalem
Abstand 2 zum Mittelpunkt P definiert werden (siehe
nebenstehende Abbildung). Auch runde oder sogar völlig
unsymmetrische Nachbarschaften sind denkbar.
Der Pixel in der Mitte einer Nachbarschaft muss nicht
zwangsweise der Mittelpunkt P der Nachbarschaft sein.
Bei der praktischen Anwendung von
Nachbarschaftsoperatoren tritt
unweigerlich das Randproblem auf:
Wie wird der Fall behandelt, wenn ein
Pixel so nah am Rand eines Bildes
liegt, dass die Nachbarschaft über
das Bild „hinausragt”
Vier verschiedene Lösungsansätze
sind denkbar:
Die Randpixel werden nicht
betrachtet.
Der Nachteil hierbei ist, dass das
Ergebnisbild dann etwas kleiner wird
(bei einer -Nachbarschaft mit
ungeradem n um
(n − 1) / 2 Pixel auf jeder Seite).
Die benötigten Pixel außerhalb des Bildes werden
entsprechend der naheliegendsten Bildpunkte
extrapoliert.
Der Nachteil hierbei ist, dass sich
Extrapolationsfehler bei aufeinanderfolgender
Anwendung mehrerer Nachbarschaftsoperatoren ins
Innere des Bildes fortsetzen können.
Das Bild wird periodisch fortgesetzt.
Um in der Praxis die Filter anwenden zu können nutzt man
in der Regel eine m x n Filtermatrix.
Jeder Eintrag dieser Matrix entspricht einem Gewicht,
mit welchem die Nachbarpunkte des zu
transfomrierenden Punktes multipliziert werden.
Ein Punkt g(x,y) im Ergebnisbild erhält also den Wert, der
sich dadurch ergibt, dass man die Punkte seiner
Nachbarschaft mit den Werten der Filtermatrix gewichtet
aufaddiert und anschließend durch die Gesamtsumme des
Betrags der Gewichte teilt.
Beispiel: 3x 3 Filtermatrix mit dem Ableitungsoperator
und jeder Pixelwert noch
durch 6 geteilt. Man sieht,
dass der Rand mit Nullen
aufgefüllt wurde, es wäre
auch möglich, den Rand
ins Unendliche zu
erweitern. In der Praxis
würde in der Regel noch
eine Betragsbildung
durchgeführt.
Filter
nach Anwendungsgebieten
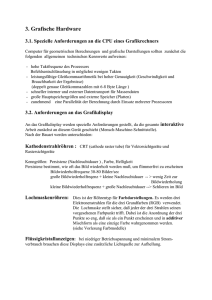
Glättung
Durch Glättung kann das Bildrauschen
vermindert werden, grobere Strukturen bleiben dagegen
erhalten. Hier ein für ein (künstlich) verrauschtes Bild. Auf
das Frequenzspektrum eines Bildes bezogen kommt eine
Glättung einem Tiefpassfilter gleich. Typische FIRGlättungsfilter sind
Gaußfilter: Gaußfilter der Größe
und einer
Varianz σ2 werden durch eine Impulsantwortmatrix
beschrieben.
Die Nachbarpunkte des Ausgangsbildes werden
entsprechend einer zweidimensionalen Gaußglocke
gewichtet. Sie werden als reales optisches Bauteil als
Gauß-Filterung der Fourier-Transformierten eingesetzt.
verrauschtes Bild
Gaußfilter
Medianfilter
Medianfilter
Beim Einsatz in der Bildverarbeitung werden die Grauwerte
der Pixel innerhalb einer definierten Umgebung eines Pixels
im Zentrum dieser Umgebung nach ihrer Größe
sortiert.
Der mittlere Wert der sortierten Liste wird zurückgegeben
und der Wert des zentralen Pixels wird durch ihn ersetzt.
Hier ein Beispiel für den Unterschied zwischen Medianfilter
und Mittelwertberechnung
Median von {1,3,5,8,13} = 5 hingegen der Mittelwert von
{1,3,5,8,13} = 6
oder
Median {(120 118 110)(125 221 105)( 90 101 114)} =
90,101,105,110,114,118,120,125,221 = 114
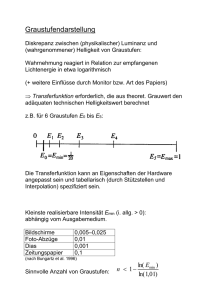
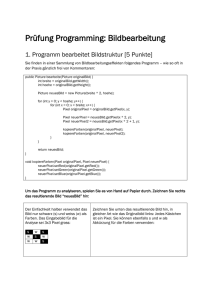
Das linke Bild des oberen Fotopaars ist von statistisch verteilten
weißen Pixeln überlagert.
Eine Median-Filterung führt zum Ergebnis rechts. Der
Informationsgehalt beider Bilder ist gleich, dennoch ist das rechte
Bild leichter zu erkennen. Werden sie durch Farbwerte aus ihrer
Umgebung ersetzt, entsteht ein leicht unscharfes Bild ohne bildfremde
Kanten. Die Ausreißerpixel (hier weiß (Salt)) werden auch Salt and
Pepper genannt.
Das rechte Photopaar zeigt das Ergebnis einer Medianfilterung
(Blockgröße: 5 Pixel) an einer Marsaufnahme aus dem Jahr 1976, die
von dunklen Pixeln durchsetzt ist.
Leider hat nicht alles nur Vorteile - z.B. bei Schrift zeigt der
Medianfilter eindeutige Schwächen.
Ein 3x3 Medianfilter lässt alle "Striche" weg die kleiner 2
Pixel breit sind. Ein 9x9 Medianfilter lässt sogar alle "Striche"
weg die eine Breite von weniger als 5 Pixel haben.
So würde schwarze Schrift auf weißen Untergrund nicht mehr
angezeigt werden da der Großteil der umgebenden Pixel weiß
ist.
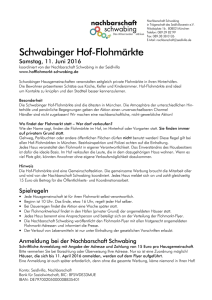
Die Kantendetektion ist Teil einer Segmentierung in der
Bildverarbeitung, bei der versucht wird, flächige Bereiche
in einem digitalen Bild von einander zu trennen.
Kantenoperatoren erkennen die Übergänge zwischen diesen
Bereichen. Diese Übergänge werden als Kanten
markiert.
Ein Kantendetektor berechnet aus einem Bild sein
entsprechendes Kantenbild in dem alle Kanten entsprechend
zu sehen sind. Um dieses zu erreichen, wird jeder Bildpunkt
durch eine Berechnung mittels einer Matrix neu gesetzt.
Originalbild
Kantenbild
Häufig finden folgende FIR-Filter Anwendung:
Ableitungsfilter
Laplacefilter , Gaußfilter
Nichtlineare Kantendetektoren:
Varianzfilter
Extremalspannenfilter
Roberts-Kreuz
Kirsch-Filter
Gradientenfilter
◦ Prewitt-Filter
◦ Sobel-Filter
◦ Canny-Filter
Die Bereiche der größten Intensität sind dort, wo die
Helligkeit des Originalbildes sich am stärksten ändert
und somit die größten Kanten darstellt.
Daher wird zumeist nach der Faltung mit dem
Sobeloperator eine Schwellwert Funktion angewandt.
Wenn wir das Originalbild als Matrix A definieren, dann können wir
folgende Faltung berechnen:
Eine richtungsunabhängige Information kann man durch die
Kombination bei der Ergebnisse erhalten:
Folgendermaßen erhält man die Richtung eines Gradienten:
Sobel contour Beispiel:
23
34
18
50 200 226
148 234 180
-1
0
1
-1
-2
-1
-2
-1
0
0
2
1
0
1
0
2
0
1
Sobel mask Mx
Sobel mask My
Bildfunction V
3
3
3
3
Tx M ijxVij ; Ty M ijyVij ; T Tx2 Ty2
i 1 j 1
i 1 j 1
Tx 23 2.50 148 18 2.226 180 379
Ty 23 2.34 18 148 2.234 180 687
?
T 379 687 784.6 Tpredefined
2
2
32
Der Laplacefilter ist ein Filter zur Kantendetektion, der die Summe
der beiden reinen zweiten Ableitungen approximiert:
Bestimmt werden dabei Stellen der Grauwertkurve, an denen
die Krümmung verschwindet (sogenannte Nulldurchgänge).
Zu beachten ist, dass homogene Flächen ebenfalls in der 2.
Ableitung gleich null sind.
Er ist richtungsunabhängig und kann für ein Bild A wie folgt
beschrieben werden:
Der Prewitt-Operator ist ein Kantendetektor ähnlich dem
Sobel-Operator, nur werden bei diesem die Grauwerte in
der aktuellen Gradientenrichtung nicht zusätzlich
gewichtet.
Analog zum Sobel-Operator erhält man als Ausgabe des
Kantendetektor ein Gradientenbild in X und eines in Y
Richtung.
Der Roberts-Operator ist ein einfacher KantendetektionsAlgorithmus der Bildverarbeitung.
Hier wird die Differenz über Kreuz liegender Pixel berechnet.
Der Operator nutzt als Faltungsmatrix eine 2×2- Matrix.
Das Gradientenstärkebild ergibt sich zu
hn,m = max ( | fn,m − fn + 1,m + 1 | , | fn + 1, m − fn, m + 1 | )
RA = Sqrt [(A-C)2 + (B-D)2]
Der Kirsch-Operator ist ein nichtlinearer Kantendetektor, der als
Kantenstärke eines Bildpunktes die am stärksten ausgeprägte
Gradientenrichtung liefert.
Eine analytische Beschreibung ist wie folgt möglich:
mit den Richtungsschablonen
Der Begriff Textur beschreibt im Kontext der
digitalen Bildverarbeitung eine Bildregion,
die sich durch bestimmte Eigenschaften
auszeichnet. Diese Eigenschaften betreffen
z.B. die Verteilung von Farb- resp.
Grauwerten, sich wiederholende geometrische
Strukturen
und deren räumliche Anordnung.
In den Standardwerken der digitalen Bildverarbeitung
findet man stattdessen qualitative Beschreibungen von
Texturen:
Pratt beschreibt Textur qualitativ über die
Grobkörnigkeit.
Dabei bezieht sich die Ausprägung der
Grobkörnigkeit auf die Periode der räumlichen
Wiederholung einer lokalen Struktur.
Der IEEE-Standard 610.4-1990 beschreibt
Grauwerttexturen mit dem Satz:
"Texture is an attribute representing the spatial
arrangement of the gray levels of the pixels in
a region”.
Gonzales und Woods beschreiben Texturen
intuitiv als Maß für Eigenschaften, wie
Glattheit, Grobheit und Gleichmäßigkeit.
Hauptkategorien
natürliche und künstliche Texturen.
Künstliche Texturen sind aus Anordnungen von
Symbolen, oder besser Texeln (engl.: texture
elements), aufgebaut.
Die Texel bestehen aus einfachen geometrischen
Primitiven, wie z.B. Linien, Kreise usw., und sind vor
einem homogenen Hintergrund positioniert.
Natürliche Texturen sind generell stochastischer
Natur und lassen sich nicht einfach über Repetitionen
von Texeln beschreiben.
Neben den beiden Hauptkategorien gibt es noch die
Unterkategorien: periodisch, stochastisch, hierarchisch
und additiv.
Periodische Texturen enthalten die strukturellen
Texturen als Untermenge. Strukturelle Texturen sind
einfache, künstliche Texturen, die aus einem
homogenen Hintergrund und einfachen, periodisch
angeordneten geometrischen Objekten bestehen.
Stochastische Texturen enthalten Strukturen, die in der
Erscheinung und der Lokalisierung stochastischen
Prozessen und keiner Periodizität genügen.
Texturarten, die über Mikro- und Makrotexturen
verfügen, werden hierarchische Texturen genannt.
Additive Texturen ergeben sich aus der Überlagerung
mehrerer Texturen.
Neben der Kategorisierung lassen sich
Texturen mit den Attributen
grob, fein, glatt, körnig, wellig, gleichmßig,
ungleichmßig oder geradlinig beschreiben.
Das allgemeine Schema der Mustererkennung ist in
Abbildung 3.1 wiedergegeben. Aufgabe
der Mustererkennung ist es, ein Objekt, welches durch
ein Muster reprasentiert wird, zu erkennen und einer
Aquivalenzklasse zuzuordnen. Aquivalenzklassen werden
uber die in ihr enthaltenen Objekte resp. Muster und die
auf die Objekte resp. Muster wirkenden Transformationen
beschrieben.
Zu den auftretenden Transformationen gehören z.B.
Rotation und Translation im dreidimensionalen Raum.
Abbildung 3.3 abstrahiert den beschriebenen Vorgang
der Merkmalkonstruktion. Wird das Muster aufgrund
äußerer Einflüsse gestört, beispielsweise durch
additives Rauschen, so stellt sich die Frage, in welcher
Weise sich die Störungen des Musters auf das zu
konstruierende Merkmal auswirkt.
Eine Methode zur Konstruktion von Merkmalen ist
demnach dann robust, wenn eine Störung des Musters
innerhalb der Umgebung M nur eine Störung der
Musters in der Umgebung F zur Folge hat, und diese
möglichst gering ist.
Daraus ergibt sich mathematisch eine gewisse
Anforderung an die Stetigkeit der Berechnungsmethode
des Merkmals.
Die Größe der Störung des Musters ist in Abbildung 3.3 als Umgebung M im
Musterraum M angegeben. Alle Punkte innerhalb der Umgebung M werden
uber die Methode zur Merkmalkonstruktion auf eine Umgebung F im
Merkmalraum F abgebildet.
Es gibt eine Vielzahl von Methoden zur
Konstruktion von invarianten Merkmalen, die
sich im zugrunde liegenden theoretischen Ansatz,
der Robustheit gegenüber Störungen
und den Invarianzeigenschaften magßgeblich
unterscheiden.
An dieser Stelle seien nur zwei Methoden für
die Invariantenkonstruktion erwähnt:
Basierend auf Fourier-Deskriptoren, ist es
möglich, invariante Grauwertmerkmale zu
konstruieren .
Ein alternativer Ansatz für die Konstruktion
von 3D-Invarianten für eine Abbildungen
stellen die Zernike-Momente dar.
Nach 1000 Stunden
45000 Stunden
135000 Stunden
Nero Africa Impala
Nero Markuina
Grigio Sardu
Gris Mondaris
Erwartung
E{( xi mi )( x j m j )}
2
ij
0
11 0
Г Г , Г 0 22
0
nn
1
rij
2
ij
r 1
rij
ij
r
1
ii . jj
ij
Kovarianz Matrix
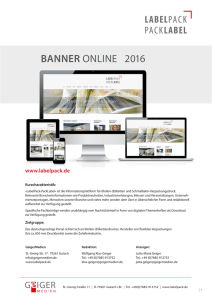
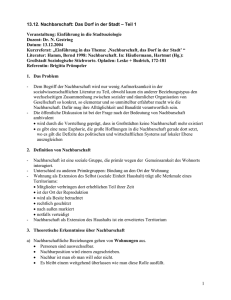
Recognition of 10 representatives of class1- GS Original
1 Color with 9Pix Motion Blur
1
10
GS Original Colour
2
0.5
GS+20% brighten
GS+40% brighten
0
9
3
-0.5
GS+60% brighten
GS+80% brighten
-1
GM Original Colour
8
4
GM+20% brighten
GM+40% brighten
7
5
6
GM+60% brighten
GM+80% brighten
Recognition of 10 representatives of class4 - GS +60%
1 brighten with 15Pix Motion Blur
1
10
2
0.5
GM Original Colour
GS+20% brighten
0
9
3
-0.5
GS+40% brighten
GS+60% brighten
-1
GS+80% brighten
8
4
GM Original Colour
GM+20%brighten
GM+40% brighten
7
5
6
GM+60% brighten
GM+80% brighten
Recognition of 10 representatives of class8 - GM + 40%
1 brighten with 25Pix Motion Blur
1
10
2
0.5
GS Original Colour
0
9
GS+20% brighten
3
-0.5
GS+40% brighten
GS+60% brighten
-1
GS+80% brighten
8
4
GM Original Colour
GM+20% brighten
GM+40% brighten
7
5
6
GM+60% brighten
GM+80% brighten