Allgemeine Grundlagen des Fußgängerverkehrs
Werbung

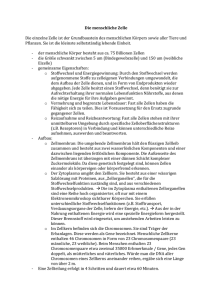
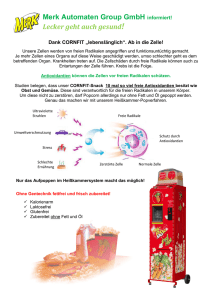
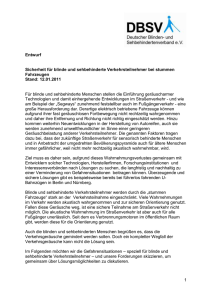
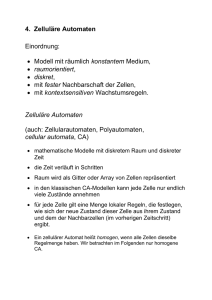
Masterarbeit Katastrophenmanagement für Fußgänger unter Verwendung zellularer Automaten Heiko Bessel Ziele der Arbeit - Darstellung der Grundlagen und Phänomene des Fußgängerverkehrs - Grundlagen Zellularer Automaten - Entwicklung eines Simulationsmodells für Fußgängerverkehr auf Grundlage zellularer Automaten - Anwendung des Modells auf charakteristische Szenarien Allgemeine Grundlagen des Fußgängerverkehrs Allgemeine Grundlagen des Fußgängerverkehrs Die Geschwindigkeiten zeigen eine Normalverteilung mit einem Mittelwert von 1,34 m/s und einer Standardabweichung von 0,26 m/s Allgemeine Grundlagen des Fußgängerverkehrs Die Fußgängerdichte hat einen direkten Einfluss auf die Geschwindigkeiten - ab einer Dichte von ca. 5 Personen / m² ist keine Bewegung mehr möglich. 1,34 m/s 5 P/m² Allgemeine Grundlagen des Fußgängerverkehrs Normalverhalten -Jeder Fußgänger versucht sich mit seiner eigenen Wunschgeschwindigkeit fortzubewegen (Mittelwert 1,34 m/s) - Fußgänger versuchen immer ihr Ziel auf direktem Weg zu erreichen, sie haben eine starke abneigung Umwege zu machen - Fußgänger halten einen bestimmten Abstand zu anderen Fußgängern, Hindernissen, Wänden etc. – die Abstände werden mit zunehmender Dichte im Strom kleiner Allgemeine Grundlagen des Fußgängerverkehrs Panikverhalten - Fußgänger werden nervös - Die Wunschgeschwindigkeiten erhöhen sich - Es wird gedrückt, die Interaktion wird physisch - Es bilden Staus an Ausgängen, Individuen verklemmen sich untereinander („clogging“) – es entstehen lebensgefährliche Drücke - Verletzte werden zu Hindernissen -Es setzt ein Herdentrieb ein – Alternativausgänge werden nicht genutzt Fußgängerphänomene in Gegenströmungen -Trennungsphänomen / Gassenbildung Fußgängerphänomene in Gegenströmungen -Oszillationsphänomen Zellulare Automaten Zellulare Automaten Geschichtliche Eckdaten - Zellulare Automaten wurden in den 40ern von John von Neumann und Stanislaw Ulam entdeckt - Populär wurden Zellulare Automaten erst mit der Vorstellung des „Game Of Life“ in den späten 60ern (John Conway) Zellulare Automaten Elemente eines zellularen Automaten - Reguläres Gitter ( L – „lattice“ ) -Zustände der Zellen ( S – „states“ ) -Nachbarschaftsrelation ( N ) - Zustandsübergangsfunktion ( f ) -Zustände der Zellen ändern sich in diskreten Schritten. -Das Tupel (L,S,N,f) wird zellularer Automat genannt. Zellulare Automaten Gittergeometrien für zweidimensionale zellulare Automaten Zellulare Automaten Bekannte Nachbarschaften Per Definition kann die Nachbarschaftsrelation eines zellularen Automaten beliebig gewählt werden, einige spezielle werden am häufigsten benutzt: Bekanntes Beispiel eines zellularen Automaten: „Game of Life“ von John Conway Zustände: besetzt, unbesetzt Regeln für besetzte Zellen: - 0 oder 1 Nachbar oder mehr als 4 => Zelle stirbt - 2 oder 3 Nachbarn => Zelle überlebt Regeln für unbesetzte Zellen: -Jede Zelle mit 3 Nachbarn erhält den Zustand besetzt „Game of Life“ von John Conway - eine Beispielkonfiguration Vorstellung des entwickelten Simulationsmodells Basismodell - Grundannahmen - Jeder Fußgänger hat sein eigenes Ziel -Geschwindigkeiten unterscheiden sich - Ist der direkte Weg versperrt, weicht der Fußgänger auf eine bevorzugte Alternativrichtung aus - Bei Kollisionen kann setzt sich ein Fußgänger durch, die anderen warten oder bewegen sich in eine alternative Richtung Basismodell – Elemente / Überblick - Gitter (2 Geometrien: Quadrat- und Hexagonalgitter) - Zustände der Zellen (leer, Hindernis, FG_A, FG_B) - Nachbarschaftsmatrix (Mooresche Nachbarschaft) - Richtungsmatrix (spiegelt die Zielorientierung wieder) - Wunschzellenmatrix (ergibt sich aus RM und NM) -Simulationstakt (verschiedene Wunschgeschwindigkeiten) - Kollisionsauflösung (der direkte Weg setzt sich durch) - Randbedingungen (Hindernisse, Ziele, Spiegel, Fabriken) Basismodell - Gitter Basismodell - Zustände Hindernis Fußgänger Gruppe A Leere Zelle Fußgänger Gruppe B Basismodell - Nachbarschaftsmatrix Zelle besetzt: Wert = 0 Zelle frei: Wert = 1 Basismodell - Richtungsmatrix direkte Zielrichtung: hoher Wert (max 1) Ausweichrichtung: abgestufte Prioritätswerte Basismodell – Wunschzellenmatrix, -vektor Die Komponenten der Nachbarschaftsmatrix und der Richtungsmatrix werden multipliziert, besetzte Zellen werden so zu Null. Die größte Komponente der Wunschzellenmatrix entspricht dem Wunschzellenvektor, hier möchte der Fußgänger am liebsten hin. Basismodell – Simulationstakt -Jede Zelle hat ihren eigenen Simulationstakt, der der Wunschgeschwindigkeit entspricht. - Sie ändert ihren Zustand in Abhängigkeit vom globalen Simulationstakt (ganzzahlige Vielfache). -Eine Sekunde wird in 10 Takte unterteilt. -Beispiel: Für einen Fußgänger mit der mittleren Geschwindigkeit von vi = 1,34 m/s und ein Gitter mit der Zellenbreite von 0,40 m ergibt sich ein Simulationstakt von 1,34*10/0,40 = 34 (3,4 s / Zelle) Basismodell – Kollisionsauflösung - Wenn mehrere Fußgänger sich im gleichen Simulationstakt in die gleiche Zelle bewegen möchten, liegt eine Kollision vor. - In diesem Fall erhält der Fußgänger den Vortritt, dessen Prioritätswert (der bei der Ermittlung des Wunschzellenvektors größte Wert) größer ist. -Das bedeutet, der Fußgänger mit direktem Ziel setzt sich durch. Modellerweiterungen Gruppenanziehung - Bewirkt, dass sich der Fußgänger dorthin bewegt, wo sich am meisten seiner eigenen Gruppe befinden. Freiraumstreben - Bewirkt, dass sich der Fußgänger dorthin bewegt, wo am meisten Freiraum (unbesetzte Zellen) ist. Anwendung des Modells auf charakteristische Szenarien (Internet: bessel.gmxhome.de)