Entscheidungstheorie
Werbung

Entscheidungstheorie
Teil 4: Prognosemodelle
Prof. Dr. Steffen Fleßa
Lst. für Allgemeine Betriebswirtschaftslehre und Gesundheitsmanagement
Universität Greifswald
1
Gliederung
1 Grundlagen
2 Werte- und Zielsystem
3 Konzepte der Entscheidungstheorie
4 Prognosemodelle
4.1 Statistische Prognosemodelle
4.1.1 Gleitende Durchschnitte
4.1.2 Exponentielle Glättung
4.1.3 Ökonometrische Modelle
4.1.4 Neuronale Netze
4.2 Prognostizierende Modelle
4.2.1 Netzplantechnik
4.2.2 Markov-Modelle
4.2.3 System Dynamics
4.3.4 Simulation
4.3 Expertenprognosen
2
Prognose-Dilemma
• „Prognosen sind schwierig, besonders
wenn sie die Zukunft betreffen.“ (zugeschrieben Karl
Valentin, Mark Twain, Winston Churchill u.a.)
• „Ein Prognostiker
ist ein Mann, der
in lichten
Momenten
düstere Ahnungen
hat“.
(Tennessee Williams)
3
4 Prognosemodelle
• Einordnung
– Grundproblem: Unsicherheit der Zukunft
• Entwicklung von Umweltzuständen
• Wirkungszusammenhänge
– Folge: Modelle sind wirkungsdefekt
– Gegenmaßnahme: Prognose
• Definition: Modelle zur Ermittlung bzw.
Vorhersage von Informationen über unsichere,
zukünftige Sachverhalte. Prognosen liefern
Planungsinformationen
4
Prognosen: Typologie
• Umweltprognosen: Prognosen über zukünftige
Entwicklungen von Problemdaten
• Entwicklungsprognose: Teilmenge der
Umweltprognosen: Prognose eines
Umweltzustandes, der vom Entscheider nicht
beeinflusst werden kann
• Wirkungsprognosen: Prognose von
Wirkungszusammenhängen zwischen
Parametern und Handlungsalternativen
5
Prognosen: Typologie (Forts.)
• Ergebnisprognosen: Prognose über den Endzustand
eines Systems bei Wahl einer bestimmten
Handlungsalternative. Oftmals werden für das Ergebnis
bestimmte Wahrscheinlichkeiten angegeben.
• Prognosen über zukünftige Handlungsalternativen:
Vorhersage der technischen, sozialen, politischen oder
kulturellen Entwicklung, die neue Handlungsalternativen
entstehen oder alte unmöglich werden lässt
• Prognosen über zukünftig zu verfolgende Ziele:
Prognose über Veränderungen des Zielsystems
6
Prognosen: Typologie (Forts.)
• Prognosen im engeren Sinne: Umwelt-,
Wirkungs- und Ergebnisprognosen
• Zeithorizont von Prognosen: Kurzfristige,
mittelfristige und langfristige Prognosen
7
Wahl der Prognosemethoden
• Grundsätzliche Eignung der Methode für
die Vorhersage
– z. B. linearer Ansatz bei zyklischen Verläufen
• Prognosefehler
– Genauigkeit der Methode
• Prognosekosten
– „Ökonomie der Modellbildung“
– Grundsatz: So genau wie nötig bei
vertretbarem Aufwand
8
4.1.1 Gleitende Durchschnitte
• Grundproblem: Zeitreihenanalyse
– Zeitreihe: Zeitlich geordnete Folge von
Beobachtungswerten y1,..yt, …, yn
– Normalfall: Äquidistante Beobachtungszeitpunkte,
d.h. Zeiträume zwischen zwei Beobachtungen sind
konstant
– Methoden:
•
•
•
•
Gleitende Durchschnitte
Glättung
Ökonometrie
Komponentenanalyse,…
9
Beispiel
x
y
x
y
1
9
6
16
2
13
7
22
3
17
8
16
4
14
9
15
5
11
10
17
x
11
12
13
14
15
y
22
20
17
20
26
10
Beispiel
30
25
y
20
15
10
Aufgabe: Wie kann man
eine Prognose für den
Zeitpunkt t=16 erstellen?
5
0
0
2
4
6
8
x [Zeit in Monate]
10
12
14
16
11
Lösung 1:
yˆ t 1 yt
• Prinzip: Fortschreibung des letzten Wertes
• Syn.: Gleitender Durchschnitt der Länge h=1
• z. B. „Das Wetter wird morgen so wie heute!“
(In Bayern meistens richtig!)
• Anwendung: oftmals bei Budgetierung
12
Lösung 1
30
25
y
20
15
10
y16=y15=26
y17=y16=26
5
0
0
2
4
6
8
10
x [Zeit in Monate]
12
14
16
18
13
0,5 y+
y yt)1
Lösung 2: yyˆt+1
t 1 =0,5*(y
t
t
t-1
• Prinzip: Fortschreibung des Durchschnitts der
letzten beiden Werte
• Syn.: Gleitender Durchschnitt der Länge h=2
• z. B. „Das Wetter wird morgen so wie der
Durchschnitt von gestern und heute!“
• Anwendung: fängt kleine Schwankungen auf
14
Lösung 2
30
25
y
20
15
10
y16=1/2*y15+1/2*y14=13+10=23
y17=1/2*y16+1/2*y15=0,5*(23+26)=24,5
5
0
0
2
4
6
8
10
x [Zeit in Monate]
12
14
16
18
15
Lösung 3: Gleitender Durchschnitt
der Länge h
h
yˆ t 1 1h yt i 1
i 1
Alle Werte gehen gleichmäßig in die Bewertung ein, d.h.
Werte, die lange zurück liegen, sind nicht „abgeschwächt“.
Saisonale Schwankungen werden nicht berücksichtigt
Nur für kurzfristige Trendaussagen geeignet, nicht für die
exakte Punktlandung oder für strategische Aussagen
16
Lösung 3:h=5
30
25
y
20
15
10
5
0
0
Deutlich glatter Verlauf.
Aber: Unterschätzung der Entwicklung bei
steigendem Verlauf (Überbetonung der
alten, nicht mehr relevanten Werte);
bei8 fallendem
Verlauf!
2 Überschätzung
4
6
10
12
14
x [Zeit in Monate]
y
16
Glättung
18
17
Berechnung in Excel
18
4.1.2 Exponentielle Glättung
• Prognosewert für Periode t+1 ergibt sich als
alter Prognosewert, der um den Schätzfehler
bereinigt wird.
yˆ t 1 yt 1 yˆ t
yt yˆ t yˆ t
yˆ t yt yˆ t
Glättungsparameter λ (0,1)
λ=1: Schätzwert für t+1 = Messwert für t
λ=0: Schätzwert für t+1 = Schätzwert für t
λ=0,5: Schätzwert für t+1 = Schätzwert für t korrigiert um
die Hälfte des Schätzfehlers des letzten Wertes
19
Was ist hier „exponentiell“?
yˆ t 1 yt 1 yˆ t
yt 1 yt 1 1 yˆ t 1
yt 1 yt 1 1 2 yˆ t 1
yt 1 yt 1 1 2 yt 2 1 yˆ t 2
yt 1 yt 1 1 2 yt 2 1 3 yˆ t 2 ...
yt 1 yt 1 1 2 yt 2 1 3 yt 3 ...
1 yt i 1 yˆ t i
i
i 1
(1-λ)i ist je geringer, je größer i ist, d.h. je weiter wir uns
vom Prognosezeitpunkt entfernen, desto geringer ist das
Gewicht des alten Wertes.
20
Beispiel (λ=0,3)
x
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
y
9
13
17
14
11
16
22
16
15
17
22
20
17
20
26
21
21
Schätzung
9,00
10,20
12,24
12,77
12,24
13,37
15,96
15,97
15,68
16,08
17,85
18,50
18,05
18,63
20,84
20,89
Schätzfehler
4,00
6,80
1,76
-1,77
3,76
8,63
0,04
-0,97
1,32
5,92
2,15
-1,50
1,95
7,37
0,16
0,11
0,3*Fehler
1,20
2,04
0,53
-0,53
1,13
2,59
0,01
-0,29
0,40
1,78
0,64
-0,45
0,59
2,21
0,05
21
0,03
Beispiel (λ=0,3)
30
25
y
20
15
10
5
0
0
2
4
6
8
10
12
14
16
18
x [Zeit in Monate]
y
Exponentielle Glättung
5 Per. Gleitender Durcschnitt (y)
22
4.1.3 Ökonometrische Modelle
• Grundlage: Statistisches Verfahren zur
Analyse der Abhängigkeiten von
endogenen und exogenen Variablen.
Ökonometrische Modelle können für
Prognosen verwendet werden (müssen es
aber nicht, da die Bestimmung von
Einflussfaktoren bereits ein wichtiger
Wissenszuwachs jenseits der Prognose
ist).
23
Grundmodell
• Gegeben ist eine exogene Variable x und
eine endogene Variable y. Gesucht ist der
Zusammenhang zwischen x und y.
• Ansätze
– Korrelation
– Methode der kleinsten Quadrate
– Goal Programming
24
Beispiel
x
2
4
3
1
2
6
8
3
1
11
3
11
14
11
15
y
3
5
3
3
1
6
5
6
1
15
4
9
13
14
17
25
18
Beispiel
16
14
12
y
10
8
6
4
2
0
0
2
4
6
8
x
10
12
14
16
26
Korrelationskoeffizient (ρ)
• Inhalt: Ein Maß für
den Zusammenhang
zwischen zwei
Variablen
• Hinweis: Oftmals
Berechnung mit
1/(n-1)
• Berechnungsbeispiel:
Regression.xls
• -1≤ρ≤1
x
n
1
n
x
i 1
Var ( x)
i
2
n
1
n
x x
i
i 1
x Var ( x)
Cov( x, y )
n
1
n
x x y
i 1
i
Cov( x, y )
( x, y )
x y
i
y
27
Beispiele
y
Positive
Korrelation
Negative
Korrelation
y
x
y
x
keine (geringe)
Korrelation
28
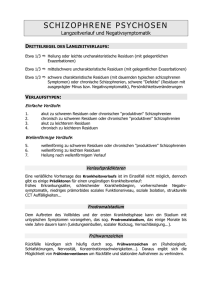
x
New evidence for the Theory of the Stork
• Zusammenhang zwischen Zahl der
Störche und Geburtenrate beim
Menschen?
• Hofer et al. (2004) in: Paediatric and
Perinatal Epidemiology 18, S. 88-92.
• Analyse für Niedersachsen, Berlin und
Brandenburg
29
New evidence for the Theory of the Stork
• Ergebnisse:
– Korrelation für Niedersachsen:
Reduktion beider Größen 1970-85;
Konstanz 1985-95
– Berlin: keine Störche; jedoch Anstieg der
Geburten 1990-2000
– Erklärung: Zunahme der Störche in
Brandenburg
30
Geburtenrate und Störche in Europa
Land
Fläche
(km2)
Störche
(Paare)
Menschen
(106)
Geburtenrate
(103/ Jahr)
Albanien
28.750
100
3.2
83
Belgien
30.520
1
9.9
87
Bulgarien
111.000
5.000
9.0
117
Dänemark
43.100
9
5.1
59
Deutschland
357.000
3.300
78
901
Frankreich
544.000
140
56
774
Griechenland
132.000
2.500
10
106
Holland
41.900
4
15
188
Italien
301.280
5
57
551
Österreich
83.860
300
7.6
87
Polen
312.680
30.000
38
610
Portugal
92.390
1.500
10
120
Rumänien
237.500
5.000
23
23
Spanien
504.750
8.000
39
439
Schweiz
41.290
150
6.7
82
Türkei
779.450
25.000
56
Ungarn
93.000
5.000
11
1.576 31
124
Korrelation und Kausalität
• Korrelation Kausalität
(Ursache-Wirkungs-Beziehung)
• Scheinkorrelation: „dritte Variable“
beeinflusst beide Merkmale systematisch
• Beispiel: Zunehmende Verstädterung
vernichtet Nistplätze und fördert
Kleinstfamilien
32
Nachteil der Korrelation
• Eine Prognose ist auf Grundlage der
Korrelation nicht möglich.
• Zusammenhänge lassen sich nur sehr
bedingt darstellen.
33
Methode der Kleinsten
Quadrate
• Prinzip: Lege eine Kurve so durch die
Punktmenge, dass die Summe der
quadrierten vertikalen Abweichungen von
dieser Kurve zu den gegebenen Werten
minimal ist.
34
Prinzip: Kleinste Quadrate
u3
y
(x1, y1)
(x3, y3)
u2
u1
(x2, y2)
x 35
Prinzip: Kleinste Quadrate
y
(x1, y1)
(x3, y3)
(x2, y2)
x 36
Alternative Gerade
y
(x1, y1)
(x3, y3)
(x2, y2)
x 37
Berechnung der kleinsten
Quadratesumme
ui yi yˆ i , wobei
yˆ ˆ ˆ x
i
0
1 i
n
n
Z u
i 1
2
i
i 1
yi ˆ0 ˆ1 xi
Lösung:
Min!
2
Cov( x, y )
ˆ
1
2
x
ˆ0 y ˆ1 x
Gerade geht
immer durch
den Mittelwert
von x und y
38
Analyse in Excel
• Einfache Regression möglich
• Analyse-Funktion „Regression“ liefert
Angaben zur Regressions-Statistik
(Interpretation!)
- Korrelationskoeffizient
- Bestimmtheitsmaß
- Koeffizienten
- t-Statistik
39
18
Vorgehen in Excel:
Anklicken eines Punktes,
„Trendlinie hinzufügen“ –
„Linear“
Beispiel
16
14
y = 1,005x + 0,6352
12
Δy; ß1= Δy/ Δx
y
10
Δx
8
6
4
2
ß0
0
0
2
4
6
8
x
10
12
14
16
40
Verwendung
• Punktprognose:
• Bestimmtheitsmaß:
yˆi ˆ0 ˆ1 x1
R
2
= Anteil der Varianz von y, der durch die
Regression erklärt wird
= Maß der Güte der Regression
s
s
2
yˆ
2
y
41
18
Vorgehen in Excel:
Anklicken eines Punktes,
„Trendlinie hinzufügen“ –
„Linear“
- „Bestimmtheitsmaß anzeigen“
Beispiel
16
14
y = 1,005x + 0,6352
12
10
y
R2 = 0,864
8
6
4
2
0
0
2
4
6
8
x
10
12
14
16
42
Erweiterungen
•
•
•
•
Mehrere Exogene
Nichtlineare Funktionen
Intervallprognosen
Hypothesentest
43
Mehrere Exogene
• Multiples lineares
Regressionsmodell
yˆ t ˆ0 ˆ1 x1t ˆ2 x2t ... ˆn xnt , t 1..T
ˆ1
y1
y ; ˆ ;
ˆ
y
n
n
1 x11 xn1
X
1 x
xnT
1T
1
ˆ X X X y
44
Nicht-lineare Regression
• Vorsicht: Viele Anschlussrechnungen sind
nicht mehr möglich
– z. B.: Bestimmtheitsmaß nur bedingt zu
gebrauchen
– z. B. Intervallschätzer nur bedingt möglich
45
25
Beispiel
20
y = 1,8771e0,1577x
R2 = 0,7514
15
y
y = 1,005x + 0,6352
R2 = 0,864
y = 4,98Ln(x) - 0,4635
R2 = 0,7525
10
5
0
0
2
4
6
8
-5
10
12
14
16
46
x
Intervallprognose
• Prinzip: es wird nicht ein Punkt angegeben,
sondern ein bestimmtes Intervall, innerhalb
dessen der „wahre“ Wert mit einer
Wahrscheinlichkeit von mindestens X % liegt
• Beispiel: für 95 % aller Stichproben erhält man
ein Intervall, in dem der wahre Wert liegt.
• Je weiter wir uns vom Durchschnitt der
exogenen Variablen entfernen, desto größer
wird das anzugebende Konfidenz(=Vertrauens)intervall.
47
Intervallprognose
y
yoben
95% Konfidenzintervall
yunten
y
48
x
xi
x
Hyothesentest
• Häufig: Hypothese H0: ß1=0 d.h. hat keinen Einfluss
auf y
f ( ˆ1 )
E ( ˆ1 )
̂1
49
95 % aller möglichen Werte von ˆ1
Signifikanzniveau
• Fehler vom Typ 1: eine Nullhypothese wird als falsch
abgelehnt, obwohl sie wahr ist
• Fehler vom Typ 2: eine Hypothese wird als wahr
angenommen, obwohl sie falsch ist.
• P-Wert:
– Für die aktuelle Stichprobe wird H0 ablehnt.
– P: Die Wahrscheinlichkeit, einen Fehler vom Typ 1 zu begehen
– je kleiner der p-Wert, desto signifikanter ist der Zusammenhang
• p=0,05: hohes Risiko, dass keine Signifikanz besteht
• p=0,01: mittleres Risiko, dass keine Signifikanz besteht
• p=0,001: geringes Risiko, dass keine Signifikanz besteht
50
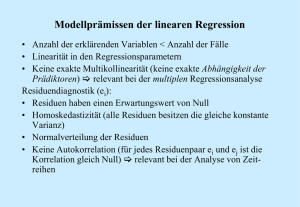
Voraussetzungen der
OLS-Schätzung
1. Lineares Modell, jeweils eine endogene und
exogene Variable (reelle Zahlen)
2. Die Residuen haben einen Erwartungswert von
null
3. Homoskedastizität: Die Residuen haben eine
konstante Varianz
4. Die Residuen sind nicht autokorreliert
5. Spezifikation: Die Exogene ist richtig gewählt
51
Erweiterungen des Modells
1. Lineares Modell, jeweils eine endogene und
exogene Variable (reelle Zahlen)
2. Die Residuen haben einen Erwartungswert von
null
3. Homoskedastizität: Die Residuen haben eine
Erweiterungen:
konstante
Varianz
Mehrere
Exogene: Multiple Lineare Regression
Endogene:
von Regressionsgleichungen
4. Die Mehrere
Residuen
sindSysteme
nicht autokorreliert
Unabhängige Regressionsgleichungen
Regressionsgleichungen
5. Spezifikation:Abhängige
Die Exogene
ist richtig gewählt
Exogene ist natürliche Zahl oder binär (z. B. Mann=0; Frau=1):
Dummy Variablen
Endogene ist natürliche Zahl oder binär (z. B. Gesund=0;
Krank=1): LOGIT- und PROBIT-Modelle
52
Erweiterungen des Modells
1. Lineares Modell, jeweils eine endogene und
exogene Variable (reelle Zahlen)
2. Die Residuen haben einen Erwartungswert von
null
3. Homoskedastizität: Die Residuen haben eine
konstante Varianz
4. Die Residuen sind nicht autokorreliert
Problem:
5. Spezifikation:
Diesein,
Exogene
ist richtig
Es könnte durchaus
dass das Residuum
bei gewählt
großen Werten
der Exogenen stärker / mehr streut als bei kleinen Werten
(Heteroskedastizität)
Lösung:
Generalized Least Square (GLS)
53
Erweiterungen des Modells
Problem:
Es könnte durchaus sein, dass ein Zusammenhang zwischen den
1. Lineares
Modell,
jeweils
endogene
und
aufeinander
folgenden
Residueneine
besteht
(Autokorrelation)
LösungZahlen)
exogene Variable (reelle
Generalized Least Square (GLS)
2. Die Residuen haben einen Erwartungswert von
null
3. Homoskedastizität: Die Residuen haben eine
konstante Varianz
4. Die Residuen sind nicht autokorreliert
5. Spezifikation: Die Exogene ist richtig gewählt
54
Erweiterungen des Modells
1. Lineares Modell, jeweils eine endogene und
exogene Variable (reelle Zahlen)
Fehlspezifikation
2. Die Residuen haben
einen Erwartungswert von
z. B. Prognose des Konsums verwendet nur Altersstufe und Kinderzahl,
null
aber nicht Familieneinkommen
3. Homoskedastizität: Die Residuen haben eine
konstante Varianz
4. Die Residuen sind nicht autokorreliert
5. Spezifikation: Die Exogene ist richtig gewählt
55
Qualitative Endogene
• Normalerweise: Quantitative Endogene, z. B. y= Absatz
• Ausnahme: Qualitative Endogene, z. B. „Kunde kauft das
Produkt“
1 Kunde kauft
yi
• Übertragung der Qualitativen:
sonst
0
• Lösung:
– Annahme: Nutzen eines Gutes hängt linear von verschiedenen
Exogenen ab
– Die Wahrscheinlichkeit, dass der Nutzen zum Wert „1“ führt,
kann durch eine Verteilungsfunktion angegeben werden
• y‘ ist die Wahrscheinlichkeit, dass y den Wert „1“ annimmt (damit
zwischen 0 und 1 verteilt)
• Problem: Welche Wahrscheinlichkeitsverteilung hat y?
56
Lösungen
• Wahrscheinlichkeit, dass y=1, wird durch eine
Standardnormalverteilung angegeben: PROBITModell
• Wahrscheinlichkeit, dass y=1, wird durch eine
Logistische Funktion angegeben: LOGIT-Modell
• Software: Enthält entsprechende Tools
• VORSICHT: Kombination von LOGIT, GLS und
Systeme von Gleichungen ist extrem schwierig,
z. B. Full-Information-Maximum-Likelihood
Schätzer (FIML)
• Erweiterungen: Multi-nominale Endogene (z. B.
y=0, 1,2,3)
57
Goal-Programming
• Prinzip: Abstände werden minimiert, nicht
quadrierte Abstände
• Lösung: LP
• Problem: Anschlussrechnungen schwierig, z. B.
Intervallschätzung nur über Monte-Carlo-Simulation
a : Höhenparam eter
b : Steigungsp arameter
ui : Residuum; nicht vorz eichenbesc hränkt
ui yi -a-bxi für i 1..n
u i : Positivtei l des Residuums; u i 0
ui ui 0
u i : Negativtei l des Residuums; u i 0
x i : Konstante : Exogene x, i 1..n
y i : Konstante : Exogene y, i 1..n
ui ui ui für i 1..n
für i 1..n
n
Z ui ui Min!
i 1
58
4.1.4 Neuronale Netze
• Analogie zum menschlichen Gehirn:
– Neuronen (Knoten)
– Netze: Verbindungen zwischen Knoten
– Neuronen haben üblicherweise mehrere
Eingangsverbindungen sowie eine
Ausgangsverbindung.
• Aktionspotential: Wenn die Summe der
Eingangsreize einen gewissen Schwellenwert
überschreitet, sendet das Neuron ein
Ausgangssignal
59
Neuronales Netz
Neuron
Reiz
Ausgangssignal
60
Neuronales Lernen
• Eigenschaft neuronaler Netze: Erlernen
(„Trainieren“) von komplexen Mustern ohne
vorherige Festlegung der Regeln;
Neue Verknüpfungen und Reizschwellenwerte
entstehen.
– Je häufiger ein Neuron A gleichzeitig mit Neuron B
aktiv ist, umso bevorzugter werden die beiden
Neuronen aufeinander reagieren
("what fires together, wires together").
– Verbindungen bauen sich selbständig auf, ohne dass
dies ein bewusster Programmierschritt wäre
61
Künstliches neuronales Netz
• Forschungsgegenstand der Neuroinformatik, Künstliche
Intelligenz
• Versuch der Nachkonstruktion des Lernverhaltens von
Neuronalen Netzen
• Beispiele: Vorhersage der Aktienkursentwicklung
• Vorteile:
– Lernfähigkeit, wenn Kausalzusammenhänge nicht bekannt sind
– Toleranz gegenüber fehlerhaften, ja sogar unbekannten Inputs
• Nachteile
– Intensives Training, zeitintensiv
– Neuronales Netz ist „Black Box“
– kein „optimales“ Ergebnis
62
4.2 Prognostizierende Modelle
4.2.1 Netzplantechnik
• Definition: Ein Netzplan ist ein Graph, der mit Hilfe von
Knoten und Kanten (größere) Projekte visualisiert und
Anschlussrechnungen ermöglicht
• Arten
– Tätigkeitsgraph und Ereignisgraph
– Stochastische und deterministische NPT
• Teilprobleme
–
–
–
–
Strukturplanung
Zeitplanung
Kostenplanung
Ressourcenplanung
63
Praxis der NPT
• wahrscheinlich häufigstes OR-Verfahren, jedoch
meist „versteckt“ in ProjektmanagementSoftware
(z. B. MS-Project)
• Arten:
– CPM (Critical Path Method, 1956): Theorie
– MPM (Metra Potential Method, 1957): Praxis
– PERT (Program Evaluation and Review Technique,
1956): Theorie
64
Strukturplanung
• Strukturliste
Nr.
Tätigkeit
Vorgänger
Nachfolger
A
Vorbereiten des Grundstückes
-
B
B
Aushub der Fundamente
A
C
C
Rohbau
B
D, F
D
Innenausbau
C
E
E
Inbetriebnahme
D, F, G
-
F
Außenanlagen/Zuwege Bereiten
C
E
G
Mitarbeiterschulung
-
E
65
Tätigkeitsgraph
• Inhalt:
– Knoten = Tätigkeit
– Kante = Anordnungsbeziehung
– Metra-Potential-Methode (MPM)
F
BEGINN
A
B
C
D
E
END
ENDE
G
66
Ereignisgraph
• Inhalt:
– Knoten = Ereignis
(z. B. Anfang/Ende einer Tätigkeit)
– Kante = Tätigkeit
– Critical Path Method (CPM), Program Evaluation and
Review Technique (PERT)
F
A
B
C
S
D
E
G
67
Zeitplanung im Ganttdiagramm
Nr.
Tätigkeit
Zeitbedarf [Tage]
Nachfolger
A
Vorbereiten des Grundstücks
20
B
B
Aushub der Fundamente
60
C
C
Rohbau
150
D, F
D
Innenausbau
120
E
E
Inbetriebnahme
10
-
F
Außenanlagen/Zuwege Bereiten
20
E
G
Mitarbeiterschulung
30
E
68
Zeitplanung im Ganttdiagramm
Tätigkeit
Ende: 360
G
F
E
D
C
B
A
100
200
300
Zeit
69
Erweiterung: Puffer
Tätigkeit
Puffer
Ende: 360
G
F
E
D
C
B
A
100
200
300
Tätigkeiten ohne Puffer sind zeitkritisch,
d.h. sie bilden den „kritischen Pfad“
Zeit
70
Zeitplanung im MPM
Knotennummer
Vorgangsdauer
Zuständigkeit
Nr
.
Zu
.
Name der Tätigkeit i
Di
FZi
.
Frühester
Anfangszeitpunkt
SZi
.
FEi
.
Spätester
Anfangszeitpunkt
SEi
.
Frühester
Endzeitpunkt
Spätester
Endzeitpunkt
71
Zeitplanung im MPM
i
Di
j
Dj
Zu
.
Name der Tätigkeit i
FZi
.
SZi FEi
SEi
.
.
.
dij = Zeitlicher Mindestabstand zwischen Beginn
von Tätigkeit i und Beginn von Tätigkeit j
Zu
.
Name der Tätigkeit j
FZj
SZj
FEj
SEj
.
72
Zeitplanung im MPM
A
.
B
Vorbereiten des Grundstücks
20
.
C
.
.
60
20
Rohbau
Aufhub der Fundamente
150
60
.
.
150
F
.
D
.
.
Innenausbau
Außenanlagen u. Zuwege
Bereiten
Mitarbeiterschulung
20
.
.
120
.
20
30
.
150
0
G
.
120
E
.
Inbetriebnahme
73
10
.
Hinrechnung
A
.
B
Vorbereiten des Grundstücks
0
20
.
C
.
.
60
20
Rohbau
Aufhub der Fundamente
60
150
20.
80.
150
150
0
G
F
.
.
Innenausbau
Außenanlagen u. Zuwege
Bereiten
Mitarbeiterschulung
30
D
.
20
0
230
.
30
120
20
E
FZj = Max{FZi+dij} für alle Vorgängerknoten
FZ1=0 für den Beginnknoten
230
.
.
.
120
.
Inbetriebnahme
74
10
350
.
Rückrechnung
A
.
B
Vorbereiten des Grundstücks
0
20
0.
.
.
C
.
.
60
20
Rohbau
Aufhub der Fundamente
60
20.
150
20.
80.
80.
150
150
0
G
F
.
0
.
Innenausbau
Außenanlagen u. Zuwege
Bereiten
Mitarbeiterschulung
30
D
.
20
320
.
230
.
330
.
30
120
20
E
SZi = Min{SZj-dij} für alle Nachfolgerknoten
SZn=FZn für den Endknoten
230
.
230
.
.
120
.
Inbetriebnahme
75
10
350
.
350
.
Endzeitpunkte
A
.
B
0
20
0.
20.
20.
.
60
20
Vorbereiten des Grundstücks
C
.
Rohbau
Aufhub der Fundamente
60
20.
20.
80.
150
80
80.
80.
150
F
.
30
0
320
.
30.
D
.
.
Innenausbau
Außenanlagen u. Zuwege
Bereiten
Mitarbeiterschulung
20
350
.
30
FEi = FZi+Di
SEi=SZi+Di
230
.
330
.
250
.
350
.
230
.
150
0
G
230
.
120
20
E
230
.
230
.
350
.
120
350
.
.
Inbetriebnahme
76
10
350
.
350
.
360
.
360
.
Puffer
• Puffer I: Gesamtpuffer
– Alle Vorgänger fangen frühest möglich an, alle
Nachfolger spätest möglich
– P_Ii=SZi-FZi
• Puffer II: freier Puffer
– Alle Vorgänger fangen frühest möglich an, alle
Nachfolger frühest möglich
– P_IIi=Min{FZj-FZi-dij}, wobei P_IIi≥0
• Puffer III: unabhängiger Puffer
– Alle Vorgänger fangen spätest möglich an, alle
Nachfolger frühest möglich
77
Puffer
A
.
B
0
20
0.
20.
20.
.
60
20
Vorbereiten des Grundstücks
C
.
Rohbau
Aufhub der Fundamente
60
20.
20.
80.
150
80
80.
80.
150
F
.
30
0
320
.
30.
D
.
.
Innenausbau
Außenanlagen u. Zuwege
Bereiten
Mitarbeiterschulung
20
350
.
230
.
30
P_I(G) = 320-0=320
P_II(G) = 350-0-30 = 320
P_I(F) = 330-230 = 100
P_II(F) = 350-230-20 = 100
330
.
250
.
350
.
230
.
150
0
G
230
.
120
20
E
230
.
230
.
350
.
120
350
.
.
Inbetriebnahme
78
10
350
.
350
.
360
.
360
.
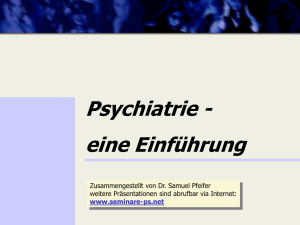
Kostenplanung
Zeitbedarf [Tage]
Kosten pro Tag
Vorbereiten des
Grundstückes
20
100
B
Aushub der Fundamente
60
100
C
Rohbau
150
200
D
Innenausbau
120
200
E
Inbetriebnahme
10
100
F
Außenanlagen/Zuwege
Bereiten
20
200
G
Mitarbeiterschulung
30
500
Nr.
Tätigkeit
A
79
Kostenverlauf bei frühestem
Beginn
0-20
A
20-30
30-80
100
100
80-230
230-250 250-350 350-360
100
B
C
200
D
200
200
E
100
F
G
200
500
500
Kosten 600
/ Tag
600
100
200
400
200
100
Tage
20
10
50
150
20
100
10
Summe
12000
6000
5000
30000
8000
20000
1000
80
Kostenverlauf für späteste und früheste Zeitpunkte
90000
80000
70000
Kosten
60000
50000
40000
30000
20000
10000
0
0
50
100
150
200
250
300
350
400
Zeit [Tage]
81
Szi
Fzi
PERT-COST
• Ermittlung von zeitlichen und
kostenmäßigen Überschreitungen
• Hinweis: Nicht zu verwechseln mit der
stochastischen NPT PERT.
82
PERT-COST (Beispiel)
Kosten
Istkosten
zur Istzeit
Plankosten
zur Planzeit
Plankosten
zur Istzeit
Plankosten zur Istzeit Plankosten zur Planzeit=
Zeitliche Überschreitung
„jetzt“
Zeit
83
PERT-COST (Beispiel)
Plankosten
zur Planzeit
Kosten
Istkosten
zur Istzeit
Kostenabweichung
Plankosten
zur Istzeit
„jetzt“
Zeit
84
Ressourcenplanung
• Bedeutung: falls Ressourcen nicht ausreichend
sind, müssen die Tätigkeiten verschoben
werden
• Varianten
– Verschiebung innerhalb der Puffer
– Verlängerung des frühesten Endzeitpunktes
• Verfahren von Fehler
• Optimierung: Konventionalstrafe vs. Kosten für
Zusatzaggregate
• Praxisbeispiel MS-Project: Bauprojekt ET 4
85
4.2.2 Markov-Modelle
• Prozess: Folge von ursächlich verbundenen
Ereignissen im Zeitablauf
• Stochastischer Prozess: Abfolge ist nicht fest
vorgegeben, sondern unterliegt bestimmten
(bekannten) Wahrscheinlichkeiten
• Markov-Prozess: Die Übergangswahrscheinlichkeit aij von Zustand wi nach wj hängt
allein von Zustand wi zum Zeitpunkt t, jedoch
nicht vom Zustand wk zum Zeitpunkt t-1 ab
(„Beschränktes Gedächtnis“).
86
Zustände und Übergänge im Markov-Graph
a22
w2
a24
a12
a23
a21
a42
a44
a14
w1
a31
a11
w4
a41
a34
a32
a13
a43
w3
a33
87
Beschreibung von Prozessen
• anhand von Ereignissen
– z. B. Zahl der Ankünfte (Poissonverteilt)
• anhand von Übergängen
– z. B. Zwischenankunftszeiten ‚
(Negativ-Exponentiell-Verteilt)
• Von besonderer Bedeutung sind hierbei
Warteprozesse (Warteschlangentheorie)
88
Markov-Modell
w t 1 w t A
w1
w t ... ;
w
n
a11 a12
a 21 a 22
A
an 1 an 2
w t w 0 A
... a1n
... a 2 n
... ann
w t 1 w t A
t
89
Prognose mit Markov-Modellen
• Vorhersage des Zustandsvektors zum
Zeitpunkt t
• Berechnung von Kennziffern, z. B.
durchschnittliche Aufenthaltsdauer im
System, durchschnittliche Wartezeiten etc.
w t w 0 A
t
90
Spezialfälle
• Absorbierende Markovketten
– es gibt einen Zustand, der nicht mehr
verlassen werden kann, z. B. Totalschaden,
Tod
• Inhomogene Markovketten
– Übergangswahrscheinlichkeiten sind nicht
konstant
91
Beispiel: Leihwagen zwischen drei Orten
Greifswald
Berlin
Schrott
Hamburg
92
Übergangsmatrix
Greifswald
Berlin
Hamburg
Schrott
Greifswald
0,7
0,2
0,05
0,05
Berlin
0,05
0,8
0,1
0,05
Hamburg
0,1
0,1
0,7
0,1
Schrott
0
0
0
1
93
Zugänge, Anfangsbestand,
Entwicklung
Zugang
Anfangsbestand t=0
t=1
t=50
Greifswald
1
50
60
19
Berlin
2
100
112
43
Hamburg
2
200
155
25
Schrott
0
0
28
513
94
Zugänge, Anfangsbestand,
Entwicklung
Zugang
Anfangsbestand t=0
Greifswald
1
50
Berlin
2
100
Hamburg
2
200
Schrott
0
0
t=1
Zugang61
zu
gering, um die
Zahl der Autos
112
zu halten:
Simulation – wie
viele Zugänge
155wo,
brauche ich
um Konstanz zu
gewährleisten?
28
t=50
19
43
25
513
95
Zugänge, Anfangsbestand,
Entwicklung
Zugang
Anfangsbestand t=0
t=1
t=50
Greifswald
3
50
63
77
Berlin
4
100
114
158
Hamburg
17
200
170
122
Schrott
0
0
28
1193
96
Zugänge, Anfangsbestand,
Entwicklung
Zugang
Pro Periode3
Greifswald
zusätzlicher Transport
von Greifswald (22/50
Fahrzeuge) und 4von
Berlin
Berlin (58/50
Fahrzeuge) nach
Hamburg nötig,17um
Hamburg
Konstanz zu halten.
Schrott
0
Anfangsbestand t=0
t=1
t=50
50
63
77
114
158
200
170
122
0
28
1193
100
357
97
4.2.3 System Dynamics
• Problem der Prognose mit MarkovModellen: Homogenität, d.h.
Unveränderlichkeit der
Übergangswahrscheinlichkeiten
• Populationswachstum: Zuwachs ist
abhängig von der bestehenden Population
98
Wachstum (Rate = 0,05)
t
Anfangsbestand
Zuwachs
0
Endbestand
100.000.000
1
100.000.000
5.000.000
105.000.000
2
105.000.000
5.250.000
110.250.000
3
110.250.000
5.512.500
115.762.500
4
115.762.500
5.788.125
121.550.625
5
121.550.625
6.077.531
127.628.156
6
127.628.156
6.381.407
134.009.564
7
…
…
…
99
Wachstum
2,0E+09
1,8E+09
1,6E+09
Population
1,4E+09
1,2E+09
1,0E+09
8,0E+08
6,0E+08
4,0E+08
2,0E+08
0,0E+00
0
20
40
60
80
100
Zeit [Jahre]
120
140
160
180
100
200
System Dynamics Modell
Imaginäre Quelle
Zuwachs
in t
101
System Dynamics Modell
Immaginäre Quelle
Zuwachs
in t
Population
102
System Dynamics Modell
Immaginäre Quelle
Rate
Zuwachst
in t
Population
103
Gleichungen
Pt
r
Pt , wobei
T
: Population zum Zeitpunkt t
r
: Wachstumr ate pro Zeitraum
T
: Zeiteinhe iten pro Zeitraum
Pt 1 Pt
r
r t
P
P
P
e
t
t
0
Lim
T
T
Pt 1 Pt P t
P t r Pt , wobei T 1
Differentialgleichung
Differenzengleichung
104
System Dynamics einer Population
Jahr
Bevölkerung
Exponentialgleichung
Differenzengleichung
t = 1 Tag
Differenzengleichung
t = 1 Monat
0
100.000
100.000
100.000
1
105.127
105.126
105.116
2
110.517
110.516
110.494
3
116.183
116.182
116.147
4
122.140
122.138
122.089
5
128.402
128.400
128.336
6
134.985
134.983
134.901
7
141.906
141.903
141.803
8
149.182
149.178
149.058
9
156.931
156.826
156.684
10
164.872
164.866
164.701
105
Umsetzung
• World Dynamics (Club of Rome; Grenzen
des Wachstums)
• Industrial bzw. Business Dynamics
(Forrester, Sterman)
• Disease Dynamics
• Software: Dynamo (1960), Stella (1980),
etc.
106
Industrial Dynamics
• EDV-gestütztes dynamisches Modell der
Unternehmung
• Technischer Wandel induzierte neues
Management-Verständnis
• Neue Anforderungen an Methoden der
Entscheidungsfindung
• Erfassung und Simulation von Informationen
zwischen
– Abteilungen eines Unternehmens
– Unternehmen einer Wertschöpfungskette
107
Beispiel 1
•
•
•
Bedeutung von Werbung und
Konsumentenverhalten
Konsequenzen für Unternehmen einer
Wertschöpfungskette
(Produktion und Verteilung)
Abstimmungsprobleme als
Peitscheneffekt (Bullwhip Effect)
Beispiel 1
• Ineffizienz isolierter Prozesse
zwischen Hersteller, Groß- und
Einzelhandel
• Hohe Produktionsschwankungen
bei relativ geringen Nachfrageschwankungen aufgrund
zeitlicher Verzögerungen
zwischen Kundennachfrage,
Bestellung und Lieferung
• Lösung durch
Supply Chain Management:
integrative Planung der
Aktivitäten innerhalb der
Kette zur Minimierung von
Informations- und
Anpassungsproblemen
Beispiel 2
•
Darstellung und Analyse von
Bestandsveränderungen
4.3.4 Simulation
• Prinzip: Experimentiermodell, d.h.
„Durchspielen“ unterschiedlicher
Alternativen in konstruierten Systemen
• Perspektiven
– „What-If“?
– „How-to-achieve“?
111
Arten
• Deterministische Simulation: Eintritt von
Ereignissen sicher
• Stochastische Simulation: Eintritt von
Ereignissen unterliegt Wahrscheinlichkeit
• Monte-Carlo-Simulation:
– Analyse statischer Probleme mit bekannten
Wahrscheinlichkeiten
– Ermittlung von Verteilungen: Durch wiederholtes
Durchrechnen mit unterschiedlichen Zufallszahlen
ergibt sich eine Verteilung der Ergebnisparameter
– Beispiel: Boot-Strapping in Netzplänen
112
Arten (Forts.)
• Diskrete Simulation (Discrete Event Simulation,
DES)
– Modellierung von dynamischen Systemen
– Erzeugen von Objekten mit bestimmten
Eigenschaften
– Aufzeichnung der Zustände der Objekte zu
bestimmten Zeitpunkten
– Subarten:
• Ereignisorientierte Simulation: Es wird immer nur der nächste
Zeitpunkt betrachtet, an dem sich eine Zustandsänderung
ergibt („Ereignisliste“)
• Zeitorientierte Simulation: Simulationszeit wird jeweils um
denselben Zeittakt weitergestellt, auch wenn kein Ereignis
eintritt
• Kontinuierliche Simulation
– z. B. Chemie
113
Zufallszahlen
• Notwendigkeit: stochastische Simulation
• Aufgaben
– Teil 1: 0-1-Gleichverteilte Zufallszahlen
– Teil 2: Zufallszahlen nach bestimmten Verteilungen
•
•
•
•
•
•
Normalverteilt
Logarithmisch-Normalverteilt
Logistischverteilt
Poissonverteilt
Dreiecksverteilt
Betaverteilt
114
Beispiel: standardnormalverteilte
Zufallszahl
• Schritt 1: Erzeuge 12 0-1-gleichverteilte
Zufallszahl
– Erwartungswert je Zufallszahl: 0,5
– Varianz je Zufallszahl: 1/12
• Schritt 2: Addiere die 12 Zufallszahlen und ziehe
sechs ab
– Erwartungswert: 0,5*12-6=0
– Varianz: 12*1/12 = 1
– Ergebnis: annähernd standardnormalverteilte ZZ
115
Beispiele für Simulation
•
•
•
•
Simulation der Produktionsprozesse
Flugsimulator
Numerische Integration
Prognose epidemiologischer Prozesse
116
Anforderungen an
Simulationsprogramme
• Generierung von Zufallszahlen
• Überwachung des zeitlichen Ablaufs einer
Simulation („Simulationsuhr“)
• Sammlung, Analyse und statistische
Auswertung relevanter Daten/ Ergebnisse
• Aufbereitung und Präsentation
117
Simulationssprachen
• Programmiersprachen
(Fortran, C, Delphi,…)
• Simulationssprachen
– GASP, GPSS, SIMAN, SIMSCRIPT, SIMULA
• Anwendungssoftware
– SimFactory; ProModel
118
4.3 Expertenprognosen
• Direkte Befragung
– verschiedene Techniken, um diskrete oder
kontinuierliche Variablen zu erfragen
• Delphi-Methode
119
Delphi-Methode
1. Definition des Prognoseproblems
2. Auswahl der Experten, Separierung
3. Schriftliche Befragung der Expertenmeinungen
4. Zusammenstellung der Prognosen
5. Rückführung der Ergebnisse an Experten
6. Erneute schriftliche Befragung der Experten
7. Wiederholung der Schritte 4,5,6, bis die
Ergebnisse ausreichend konvertiert sind. evtl.
ergeben sich Intervalle
120