I.6.3 Kepler
Werbung

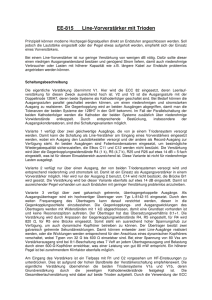
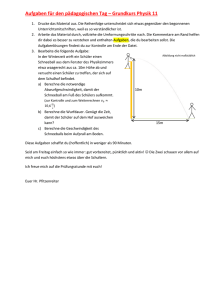
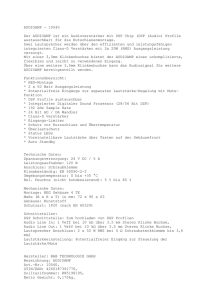
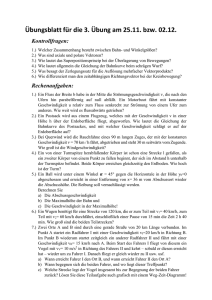
38 Newton’sche Mechanik I.6.3 Kepler-Problem Die Newton’sche Gravitationskraft zwischen zwei Massenpunkten mit Massen m1 , m2 ist eine konservative Zentralkraft, gegeben durch GN m1 m2 ~x ~ (|~x|) F~ (|~x|) = − = −∇V |~x|2 |~x| mit dem Potential V (|~x|) = − GN m1 m2 . |~x| (I.91a) (I.91b) Dabei bezeichnet ~x der Abstandsvektor zwischen den Massen und GN die Newton’sche Gravitationskonstante, GN ' 6, 674 · 10−11 m3 kg−1 s−2 . 39 I.6 Zwei-Körper-Systeme Das Ziel in diesem Abschnitt ist die Untersuchung der einfachsten möglichen Bewegungen, zu denen dieses Potential führen kann, und insbesondere die Herleitung der drei durch Kepler(j) experimentell ermittelten Gesetze. Zu diesem Zweck wird die Bewegung zweier Massenpunkte betrachtet, die über das Potential (I.91b) miteinander wechselwirken, während sie keiner äußeren Kraft unterliegen. Dieses Fragestellung wird als Kepler-Problem bezeichnet. I.6.3 a Vorbereitungen :::::::::::::::::::::: In Übereinstimmung mit den allgemeinen Ergebnissen des § I.6.1 kann man die triviale Bewegung des Schwerpunkts von der mehr interessanten Relativbewegung separieren, wobei die letztere die Zeitänderung der Relativkoordinate ~x für ein fiktives Teilchen mit der reduzierten Masse µ ist. Da es sich bei dem Newton’schen Potential (I.91b) um ein Zentralpotential handelt, ist der Drehimpuls ~` für die Relativbewegung erhalten. Da sowohl ~x(t) als ~x˙ (t) senkrecht auf ~` sind, bleibt die Bahnkurve in einer Ebene senkrecht auf ~` — der sog. Ekliptik. Dementsprechend lohnt es sich, ein Koordinatensystem zu wählen, in dem die Richtung von ~` entlang einer der Achse ist, z.B. der z-Achse. Die Wahl der Koordinaten in der Bewegungsebene bleibt noch offen. Man kann zunächst feste kartesische Basisvektoren ~ex , ~ey einführen, und dementsprechend die Bahnkurve durch x(t), y(t) parametrisieren. Da das Wechselwirkungspotential (I.91b) nur vom Abstand r(t) = |~x(t)| zum Kraftzentrum abhängt, ist es sinnvoll, ein Koordinatensystem — genauer eine Parametrisierung der Bahnkurve — zu wählen, in dem dieser Abstand eine direkte Rolle spielt. Dazu dient noch der Winkel ϕ(t) der Relativkoordinate relativ zu einer festen Richtung, z.B. zur x-Achse, zur Charakterisierung von ~x(t). Somit lautet die Relativkoordinate ~x(t) = r(t)~er (t), (I.92) wobei die instantane Richtung des Einheitsvektors ~er (t) in Radialrichtung von der Position des (fiktiven) bewegten Körpers und damit indirekt von der Zeit abhängt: bezüglich der Basisvektoren eines festen kartesischen Koordinatensystems gilt ~er (t) = cos ϕ(t)~ex + sin ϕ(t)~ey . (I.93) Man bezeichnet mit ~eϕ (t) einen orthogonal auf ~er (t) stehenden Einheitsvektor in der Bewegungsebene ~eϕ (t) = − sin ϕ(t)~ex + cos ϕ(t)~ey , (I.94) so dass ~er (t), ~eϕ (t) und ~ez (t) ≡ ~er (t)×~eϕ (t) die Basisvektoren eines mitbewegten Koordinatensystems bilden, wobei ~ez (t) hier eigentlich zeitunabhängig ist. Die Ableitung der Gl. (I.93) nach der Zeit gibt d~er (t) dϕ(t) dϕ(t) =− sin ϕ(t)~ex + cos ϕ(t)~ey = ϕ̇(t)~eϕ (t). dt dt dt (I.95) Somit lautet die Relativgeschwindigkeit, unter Verwendung der Kettenregel beim Ableiten der Gl. (I.92) d~x(t) dr(t) d~er (t) = ~er + r(t) = ṙ(t)~er + r(t) ϕ̇(t)~eϕ (t). (I.96) dt dt dt Schließlich ist der Drehimpuls der Relativbewegung gegeben durch ~`(t) ≡ ~x(t) × µ~x˙ (t) = µr(t)2 ϕ̇(t)~ez mit konstanter Richtung und konstantem Betrag ` ≡ ~`(t) = µr(t)2 ϕ̇(t). (j) J. Kepler, 1571–1630 (I.97) (I.98) 40 Newton’sche Mechanik I.6.3 b Zweites Kepler’sches Gesetz :::::::::::::::::::::::::::::::::::: In dem Intervall zwischen zwei sukzessiven Zeitpunkten t und t + dt ändert sich der Polarwinkel ϕ(t) der Bahnkurve um dϕ ' ϕ̇(t) dt. Die Ortsvektoren ~x(t) und ~x(t+dt) und die Bahnkurve grenzen ein Flächenelement ab, dessen Flächeninhalt annähernd durch dS = 1 r(t) r(t) dϕ = 2 t + dt r(t) dϕ t dϕ r(t)2 dϕ(t) dt 2 dt r(t) Abbildung I.8 gegeben ist. Ersetzt man die Zeitableitung ϕ̇(t) mithilfe der Gl. (I.98), so kommt der „Flächensatz“ dS ` = = Konstante. dt 2µ (I.99) d.h. (zweites Kepler’sches Gesetz ) Der Ortsvektor (von dem Stern zum Planeten) überstreicht in gleichen Zeiten gleich große Flächen. (I.100) Dabei beziehen sich die Worte zwischen Klammern auf den historischen durch Kepler betrachteten Fall eines Planeten um einen viel schwereren Stern, m2 m1 . Im Fall zweier (ungefähr) gleich schweren Körper, wie z.B. die zwei Sterne eines Doppelsternsystems, geht die Relativkoordinate von einem Stern zum anderen. Bemerkung: In der Herleitung dieses Ergebnisses wurde die Form des Potentials V (r) nicht benutzt, d.h. der Flächensatz gilt für jedes Zentralkraftproblem. I.6.3 c Bahnkurve. Erstes und drittes Kepler’sches Gesetz ::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: Die Gesamtenergie der Relativbewegung ist 1 d~x(t) 2 E = T (t) + V (t) = µ + V r(t) , 2 dt d.h. unter Verwendung der expliziten Form (I.96) der Geschwindigkeit µ E= ṙ(t)2 + r(t)2 ϕ̇(t)2 + V r(t) . 2 Da die Newton’sche Gravitationskraft konservativ ist, ist diese Gesamtenergie erhalten. Mithilfe der Gl. (I.98) kann man die Zeitableitung ϕ̇(t) durch `/µr(t)2 ersetzen, so dass die totale Energie sich noch als µ `2 E = ṙ(t)2 + + V (r) (I.101) 2 2µr(t)2 umschreiben lässt, unabhängig von der Winkelvariablen ϕ. Dabei ist ṙ(t) die radiale Geschwindigkeit. Betrachtet man dementsprechend die rechte Seite von Gl. (I.101) als totale Energie für die eindimensionale Bewegung in Radialrichtung, so ist der erste Term die zugehörige kinetische Energie, während die zwei letzten ein effektives Potential Veff (r) ≡ V (r) + darstellen. Dann gilt ṙ(t)2 = `2 2µr2 2 E − Veff (r) . µ (I.102) (I.103) Je nach den relativen Werten von der Gesamtenergie E und dem minimalen Wert Veff,min < 0 des effektiven Potentials kommen drei verschiedene Möglichkeiten vor (vgl. auch Abb. I.9): 41 I.6 Zwei-Körper-Systeme `2 2µr2 E>0 • rmin r Veff (r) rmax • rmin Veff,min < E < 0 • E < Veff,min V (r) Abbildung I.9 – Effektives Potential Veff (r) für das Kepler-Problem. • Für E < Veff,min ist die rechte Seite von Gl. (I.103) immer negativ, so dass keine Lösung der Gleichung mit reeller Radialgeschwindigkeit existieren kann: diesen mathematischen Werten von E und ` entspricht keine physikalisch erlaubte Lösung des Kepler-Problems. • Für Veff,min < E < 0 kann die rechte Seite von Gl. (I.103) nicht-negativ sein, und zwar für Werte rmin ≤ r ≤ rmax , wobei rmin , rmax die zwei Lösungen der Gleichung Veff (r) = E sind. Da rmax endlich ist, bleibt das fiktive Teilchen immer in endlichem Abstand vom Kraftzentrum, und ist somit daran „gebunden“. Bei den Abständen rmin und rmax verschwindet die Radialgeschwindigkeit ṙ — die eigentlich ihr Vorzeichen ändern wird: dabei handelt es sich um Umkehrpunkte. Im Spezialfall E = Veff,min ist V (r) = E für einen einzigen Wert von r. Dazu gibt Gl. (I.103) ṙ(t) = 0, d.h. r bleibt konstant: die entsprechende Bahnkurve ist ein Kreis. • Für E ≥ 0 hat die Gleichung Veff (r) = E eine einzige Lösung rmin , und die rechte Seite von Gl. (I.103) bleibt positiv für r > rmin . Somit geht die Bahnkurve des fiktiven Teilchens unendlich weit weg vom Kraftzentrum: das Teilchen ist „ungebunden“. Für die obige Fallunterscheidung war die genaue Form des effektiven Potentials, und daher von V (r), nicht nötig, um die Existenz oder nicht-Existenz von Lösungen festzustellen. Die exakten Bahnkurven entsprechend den verschiedenen Fällen hängen aber natürlich von V (r) ab. Ausgehend aus Gl. (I.103) kann man den Verlauf der Bahnkurve bestimmen.(12) Einerseits gilt unter Verwendung der Kettenregel dr(t) dr(ϕ) dϕ(t) dr(ϕ) ` = = , dt dϕ dt dϕ µr2 wobei Gl. (I.98) benutzt wurde. Andererseits ist ṙ(t) auch durch Gl. (I.103) gegeben. Betrachtet man eine Lösung mit positiver Radialgeschwindigkeit, so kann man schreiben dr(ϕ) µr2 r2 p = ṙ(t) = 2µ[E − Veff (r)] . dϕ ` ` (12) Eine alternative Herleitung wird im Anhang I.A zu diesem Kapitel vorgestellt. 42 Newton’sche Mechanik Das heißt, ` dr ` dr p = p 2 2µ[E − Veff (r)] r 2µ[E − V (r)] − `/r2 und nach formeller Integration beider Seiten dieser Gleichung Z r ` dr0 p ϕ − ϕ0 = , 02 2µ[E − V (r 0 )] − `2 /r 02 r0 r dϕ = r2 (I.104) wobei r0 > rmin und r < rmax sein müssen. Im Fall des Newton’schen Potentials V (r) = −α/r mit α = GN m1 m2 kann die Integration explizit durchgeführt werden. Dabei ist Z r ` dr0 p ϕ − ϕ0 = . 02 2µ(E + α/r 0 ) − `2 /r 02 r0 r Eine erste Substitution u0 = 1/r0 , d.h. du0 = −dr0 /r02 , gibt zunächst Z u Z u du0 ` du0 p p =− . ϕ − ϕ0 = − 2µ(E + αu0 ) − `2 u02 2µE/`2 + (2µα/`2 )u0 − u02 u0 u0 Der Term unter der Wurzel im Nenner ist der Form a + bu0 − u02 = ap+ b2/4 − (u0 − b/2)2 , mit a = 2µE/`2 und b = 2µα/`2 . Eine weitere Substitution v 0 = (u0 − b/2)/ a + b2/4 liefert dann Z v Z u dv 0 u − b/2 du0 p √ = = − arccos(v) = − arccos p . 1 − v 02 a + b2 /4 − (u0 − b/2)2 a + b2/4 Somit erhält man " 2/r − 2µα/`2 ϕ − ϕ0 = arccos p 8µE/`2 + 4µ2 α2 /`4 #r . r0 Mit der Wahl der Anfangsbedingung ϕ = ϕ0 bei r = r0 ergibt sich 1/r − µα/`2 1/r − µα/`2 p cos ϕ = p = . 2µE/`2 + µ2 α2 /`4 (µα/`2 ) 2E`2 /µα2 + 1 Mit den Definitionen s ≡ 1+ 2E`2 µα2 und p ≡ `2 µα (I.105a) wird die φ-r-Abhängigkeit zu cos ϕ = p/r − 1, d.h. r= p . 1 + cos ϕ (I.105b) Das ist die Gleichung in Polarkoordinaten eines Kegelschnitts mit Exzentrizität und Parameter p. Genau wie in der Diskussion der Abb. I.9 gibt es unterschiedliche Fälle je nach dem Wert der Energie E. Dafür kann man schon bemerken, dass das effektive Potential −α/r + `2 /2µr2 minimal für r0 = `2 /µα ist, wo Veff den Wert −µα2 /2`2 ≡ Veff,min annimmt. • Für Veff,min ≤ E < 0 gilt laut Gl. (I.105a) 0 ≤ < 1; d.h., die Bahnkurve ist eine Ellipse — ein Kreis falls = 0, entsprechend E = Veff,min . Dies bildet das erste Kepler’sche Gesetz : Die Planeten bewegen sich auf elliptischen Bahnen (mit der Sonne in einem gemeinsamen Brennpunkt). (I.106) 43 I.6 Zwei-Körper-Systeme In einem Doppelsternsystem folgt jeder Stern einer elliptischen Bahnkurve mit dem anderen Stern in einem Brennpunkt, während die Position ihres Schwerpunkts unverändert bleibt. b • a ϕ • Abbildung I.10 – Ellipse mit Exzentrizität = 0, 6; die Punkte sind die Brennpunkte. √ Die große Halbachse der Ellipse ist a = p/(1 − 2 ), die kleine Halbachse b = p/ 1 − 2 . Die durch die Ellipse abgeschlossene Oberfläche ist S = πab. Andererseits ist diese Fläche über den Flächensatz (I.99) mit der Umlaufzeit T verknüpft: S = (`/2µ)T . Somit gilt T2= 4µ2 2 4π 2 µ2 2 2 4π 2 µ2 p 3 4π 2 µ 3 S = a b = a = a . `2 `2 `2 α Mit den Ausdrücken der reduzierten Masse und der Konstante α = GN m1 m2 ergibt sich schließlich 4π 2 T2= a3 . GN (m1 +m2 ) Dies entspricht dem dritten Kepler-Gesetz : Die Quadrate der Umlaufbahnen der Planeten sind proportional zur dritten Potenz der großen Bahnhalbachse. (I.107) Auf der Parametrisierung (I.105b) kann sofort den bei ϕ = 0 bzw. ϕ = π stattfindenden minimalen bzw. maximalen Abstand rmin = p/(1+) bzw. rmax = p/(1−) zwischen Planeten und Stern lesen. • Für E = 0 ist die Exzentrizität der Bahnkurve gleich 1, so dass diese eine Parabel ist. • Für E > 0 ist gemäß Gl. (I.105a) die Exzentrizität größer als 1, > 1, d.h. die Bahnkurve ist eine Hyperbel (Abb. I.11). Wie aus der Diskussion des effektiven Potentials erwartet war, ist die Bewegung räumlich unbegrenzt, und r(ϕ) wächst unendlich groß wenn cos ϕ von oben gegen −1/ geht. Dagegen wird für ϕ = 0 der minimale Abstand zum Brennpunkt rmin = p/(1 + ) erreicht. Bemerkung: In § I.5.4 b wurde argumentiert, dass die Gesamtenergie eines Systems aus Teilchen, die über die Newton’sche Gravitationskraft unter einander wechselwirken, negativ ist, s. Gl. (I.77). Dies wird durch die obigen Ergebnisse nicht versprochen, denn die Lösungen mit nicht-negativer Energie sind ungebunden, und somit eine Annahme des Virialsatzes nicht erfüllen. Bisher wurde nur das anziehende Newton’sche Potential (I.91b) betrachtet, entsprechend einem positiven Wert von α = GN m1 m2 . Man kann auch die Bahnkurven mit dem abstoßenden Potential 44 Newton’sche Mechanik • ϕ Abbildung I.11 – Hyperbel mit Exzentrizität = 1, 6 für ein anziehendes Potential. V (r) = −α/r mit α < 0 betrachten, was insbesondere dem elektrostatischen Coulomb-Potential zwischen zwei positiven oder zwei negativen Punktladungen entspricht. Wiederholt man die Herleitung zwischen Gl. (I.104) und (I.105) für den Fall α < 0, so findet man, dass die möglichen Bahnkurven wieder Kegelschnitte sind. Dabei treten die abgeschlossenen Trajektorien (Ellipse, Kreis) aber nicht mehr auf, da es keine gebundene Zustände des Zwei-KörperSystems gibt — das effektive Potential Veff (r) ist immer positiv und nimmt monoton mit r ab —, sondern nur ungebundene. Da Veff (r) > 0 für alle Abstände r, gibt es auch keine Bahnkurve mit E = 0, d.h. keine Parabel. Dagegen gibt es Hyperbeln ( > 1), wobei man aufpassen soll, das der Parameter p jetzt negativ ist. Der minimale Abstand ist somit rmin = |p|/( − 1) und wird für ϕ = π erreicht (Abb. I.12). Wiederum wird r unendlich groß für cos ϕ → (−1/) von unten. ϕ • Abbildung I.12 – Hyperbel mit Exzentrizität = 1, 6 für ein abstoßendes Potential.