Folien "Wiederholungen aus der Statik"
Werbung

Wiederholungen aus
MMSM 1 (Statik)
Dr.-Ing. Ulrich Simon
Ulmer Zentrum für Wissenschaftliches Rechnen (UZWR)
www.uni-ulm.de/uzwr
Inhalt
•
•
•
•
•
Größen, Dimensionen, Einheiten
Kraft, Moment, Freikörperbild
Statisches Gleichgewicht
Spannung, Dehnung, Werkstoffgesetze
Einfache Lastfälle
Größen, Dimensionen, Einheiten
Standard: ISO 31, DIN 1313
Größe
= Zahlenwert Einheit
Länge L = 2 m = 2 m
{Größe} = Zahlenwert
[Größe] = Einheit
falsch: Länge L [m]
richtig: Länge L / m
oder
Länge L in m
SI-Basiseinheiten (Mechanik):
m (Meter), kg (Kilogramm), s (Sekunde), K (Kelvin)
Kraft, Moment, Freikörperbild
Die Kraft [Force]
• Kräfte aus Erfahrung bekannt: Muskelkraft, ...
• Der Begriff „Kraft“ ist axiomatisch, d.h. ohne
Definition.
Zweites Newtonsches Axiom:
Kraft = Masse Beschleunigung oder F = m a
Zum Merken:
Die Kraft ist die Ursache für eine Beschleunigung
(Bewegungsänderung) oder eine Verformung
Dehnung) eines Körpers.
Einheit der Kraft
Newton
N = kgm/s2
1N
Zum Merken:
Gewichtskraft einer Tafel Schokolade 1 Newton
Schnittprinzip (Euler) und Freikörperbild
F
F
1 kg
Freikörperbild
10 N
Zum Merken:
Erst schneiden dann Kräfte und Momente eintragen.
Freikörperbild = völlig freigeschnittenes Teilsystem
Darstellen von Kräften
Kräfte sind
vektorielle Größen
mit Betrag und Richtung.
Wirkungslinie
Schraube
5N
Das Moment [Moment]
Schlitzschraube mit
SchraubenzieherKlinge (belastet)
weggeschnitten
Klinge
Schraube
F
F
F
F
Kräftepaar (F, a)
M = Fa
a
Moment M
Zum Merken:
Ein Moment ist die Ursache für eine Dreh-Beschleunigung
(Bewegungsänderung) oder eine (Dreh-) Verformung (Torsion,
Biegung) eines Körpers.
Zum Denken:
Moment gleich “Drehkraft”
Einheit des Moments
Newton-Meter
Nm = kgm2/s2
Rechte-Hand-Regel:
Darstellung von Momenten
... mit Drehpfeilen oder
Doppelpfeilen
Momente sind vektorielle
Größen
Achse
5 Nm
5 Nm
oder
Betrag
Richtung
Richtungssinn
Drehpfeil
Doppelpfeil
Moment einer Kraft bezüglich eines Punktes P
F
F
P
P
F
h
F
Faxial
F
P
M = Fh
Zum Merken:
Moment = Kraft mal Hebelarm
(Hebelarm senkrecht zur Wirkungslinie)
M
P
Fquer
Verschiedene Schnittkräfte und -momente
Schnitt durch …
a)
b)
c)
d)
e)
f)
Seil
Balken 2D
Balken 3D
(Scharnier-)Gelenk in 2D
Allg. Punktkontakt
Allg. Schnitt durch 3D Körper
(Kartoffel)
Freiheitsgrade, Bindungen
Freiheitsgrade [Degrees of Freedom, DOF]:
Objekt
Punktmasse in 2D
Punktmasse in 3D
Starrer Körper in 2D
Starrer Körper in 3D
n starre Körper in 3D
Freiheitsgrade f
Bewegungsarten
Freiheitsgrade, Bindungen
Freiheitsgrade [degrees of Freedom, DOF]:
Objekt
Freiheitsgrade f
Bewegungsarten
Punktmasse in 2D
2
2 Translationen
Punktmasse in 3D
3
3 Translationen
Starrer Körper in 2D
3
2 Transl., 1 Rotation
Starrer Körper in 3D
6
3 Transl., 3 Rotation
n starre Körper in 3D
nx6
…
Systeme von n starren Körpern mit Bindungen b [constraints]:
f = 3n – b
(in 2D)
f = 6n – b
(in 3D)
Statische Bestimmtheit
System ist statisch …
Freiheitsgrade
f = 6n - b
Gleichungssystem
unbestimmt
bestimmt
überbestimmt
>0
=0
<0
bestimmt
unterbestimmt
Dynamik
Sechs Gleichungen für
sechs unbekannte
Auflagerkräfte /momente
Redundante Bindungen
führen zu
nichteindeutigen
Lösungen
Statisches Gleichgewicht
Statisches Gleichgewicht
F
F
10 N
Freikörperbild innerhalb der Hüllfläche
Wichtig:
Gleichgewicht nur an “Freikörperbildern”
3 Gleichgewichtsbedingungen für FKB in 2D:
!
Summe aller Kräfte in x - Richtung : F1, x F2, x ... 0,
!
Summe aller Kräfte in y - Richtung : F1, y F2, y ... 0,
!
Summe aller M omente bezüglich P : M M ... F1, x h1 F2, x h2 ... 0.
P
1, z
P
2, z
Explizit gegeb.Momente
Momente aus Kraft mal Hebelarm
Kräfte-GG können durch Momenten-GG ersetzt werden, aber …
die 3 Bezugspunkte dieser Momenten-GGs dürfen nicht auf einer
Geraden liegen.
Kräfte-GG sind wie Momenten-GG mit Bezugspunkt im Unendlichen
6 Gleichgewichtsbedingungen für FKB in 3D:
Summe aller Kräfte in x - Richtung :
F
ix
!
0,
i
Summe aller Kräfte in y - Richtung :
F
iy
!
0,
i
Summe aller Kräfte in z - Richtung :
F
iz
!
0,
i
Summe aller M omente um x - Achse bezüglich Punkt P :
M
P
ix
!
0.
i
Summe aller M omente um y - Achse bezüglich Punkt Q :
M
Q
iy
!
0.
i
Summe aller M omente um z - Achse bezüglich Punkt R :
M
R
iz
!
0.
i
Kräfte-GGs können durch Momenten-GGs ersetzt werden, aber …
max. 2 Momenten-GGs um parallele Achsen
Lösungsrezept
Schritt 1: Modellbildung. Generieren eines Ersatzmodells (Skizze mit
Geometrie, Lasten, Einspannungen). Weglassen unwichtiger Dinge. Das “reale
System” muss abstrahiert werden.
Schritt 2: Koordinaten (Wege, Winkel) einführen. Ausgelenktes System
hinzeichnen und Auslenkungen gegenüber Referenzlage beschreiben.
Schritt 3: Schneiden, FKB: System aufschneiden, Schnittkräfte/-momente,
Freikörperbild (FKB).
Schritt 4: Gleichgewichte: Kräfte-/Momentengleichgewichte für Freikörper
anschreiben Gleichungen.
Schritt 5: Gleichungen lösen.
Schritt 6: Auswerten: Ergebnisse prüfen, deuten, darstellen.
Verifizieren:
Mathematisch korrekt? Plausibilität, Konvergenz, … prüfen.
Validieren:
Annahmen gültig? Mit Experimenten vergleichen.
Spannungen, Dehnungen,
Werkstoffgesetze
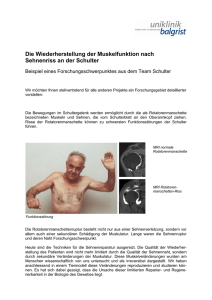
Die Spannung [Stress]
500 N
Fotos: Lutz Dürselen
Definition der Spannung
F
: lim
A0 A
Zum Merken:
• Spannung = „verschmierte“ Schnittkraft
• Analogie: Nutella-Brot
• Spannung = Kraft pro Fläche oder = F/A
Einheit der Spannung
Pascal:
Mega-Pascal:
Bar:
Pound per Square-Inch:
1 Pa = 1 N/m2
1 MPa = 1 N/mm2
1 bar = 105 Pa = 0,1 MPa
30 PSI ≈ 2 bar
Normal- und Schubspannungen
P
1
P
2
F
Zugstab
P
P
1
2
Schnitt 1:
mit Normalspannung 1
2
Schnitt 2: mit Normalspannung 2
und Schubspannung 2
Allgemeiner (3D) Spannungszustand ...
... in einem Punkt des Körpers:
3 Spannungskomponenten pro Schnitt (Normalsp., 2x Schubsp.)
*
3 Schnitte (lin. unabh.)
=
9 Spannungskomponenten Spannungstensor
aber nur
6 Komponenten davon sind unabhängig („Gleichheit der zugeord. Schubsp.“)
xx
yx
zx
xy
yy
zy
xz
yz
zz
xx
xy
xz
xy
yy
yz
xz
yz
zz
Der „Spannungstensor“
Allgemeiner Spannungszustand ...
Sechs Komponenten
Der „Spannungstensor“
Darstellung von Spannungskomponenten
Problem: Will man bunte Bilder machen, muss man sich (pro
Bild) für eine Komponente entscheiden.
Für die gesamte Information sind eigentlich alle 6 Bilder
notwendig!
Was tun, wenn man nur ein Bild zeigen will?
Man kann eine „Mischung“ der Komponenten verwenden.
So genannte „Invariante“ sind besonders „schlaue“
Mischungen, da ihr Werte unabhängig vom willkürlich
gewählten KOS bleibt.
Mises xx 2yy 2zz2xx yyxx zzyy zz3 xy 23 xz 23 yz 2
Invarianten
6 kartesische
Komponenten
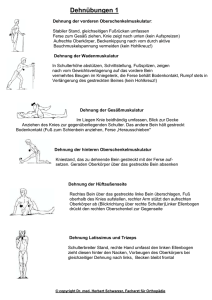
Dehnungen [Strain]
Beispiel: Kletterseil
•
•
•
•
•
•
•
•
•
•
Durchmesser: 10.5 mm
Imprägnierung: ohne
Gewicht: 72 g pro Meter
Fangstoß: 9.6 kN
Anz. Stürze: 10
Mantelverschiebung: 0 mm
Dehnung statisch: 7.7 %
Dehnung dynamisch: 32 %
Knotbarkeit: 0.7
Farbe: mix
Zum Merken:
Dehnung = relative Längenänderung (oder Winkeländerung)
Einfache technische Definition der uniaxialen Dehnung
Längen - Änderung
Dehnung
Ursprungs - Länge
L
L0
Einheit der Dehnung
Ohne Einheit, also z.B.:
• m/m
•1
• 1/100 = %
• 1/1.000.000 = με (micro strain)
Definition des lokalen 3D Dehnungszustands
6 Komponenten:
ε yy lim
y0 0
ε xy
Δy
,
y0
1
Δγ,
2
ε xx lim
x0 0
ε xz
Δx
,
x0
1
Δβ,
2
ε zz lim
y0 0
ε yz
Δz
z0
1
Δα
2
y0
unverformt
(spannungsfrei)
0
z0
0
0
x0
oder:
ij
1
ui, j u j ,i ,
2
i, j {x, y, z}
Dehnungstensor:
xx
xy
xz
xy xz
yy yz
yz zz
y0+y
0+
verformt
0+
z0+z
0+
x0+x
Werkstoffgesetze [Material laws]
• Auch: „Konstitutive Gleichungen“
Stress σ
linear
• Verknüpfen Spannungen und Dehnungen
Lineares Werkstoffgesetz
E
1D, uni-axial, Hooke’sches Gesetz
E
3D mit Werkstoff-Tensor 4. Stufe
ij Eijkl kl
… in Indexschreibweise
E
3D mit Werkstoff-Tensor 2. Stufe
Strain ε
Zustand/Symmetrieannahme
Anzahl der Werkstoffparameter
Linear
Elastic
Law
• Voll besetzter Tensor 4. Stufe für drei Dimensionen
81
• Gleichheit zugeord. Schubspannungen (Boltzmann Kontinua) und Scherdehnungen
36
• Maxwellscher Reziprozitätssatz sogenannte „Volle Anisotropie“
21
• Orthotropie
9
• Transverse Isotropie
5
• Isotropie
2
Isotropie:
v
v
(1 v)
xx
(1 v)
v
(1 v)
yy
zz
E
(
1
v
)
(
1
2
v
)
xy
yz
zx
sym
E
0
0
0
0
0
(1 2v)
2
0
0
(1 2v)
2
xx
0 yy
0 zz
xy
0 yz
(1 2v) zx
2
0
0
- Elastizitätsmodul, E-Modul [Young‘s modulus]
- Querkontraktionszahl [Poisson‘s ratio] (0 ... 0.3 ... 0.5)
Kompliziertere Werkstoffgesetze:
Spannung σ
.
.
.
• Nicht-linear
• Nicht-elastisch (= plastisch)
Dehnung ε
• Viskoelastisch, Typ: innere Dämpfung
Spannung σ
Typ: Gedächtniseffekt
Belastung
Entlastung
Dehnung ε
Spannung σ
b1
k
b
Belastung
k0
k1
Entlastung
Dehnung ε
4 einfache Lastfälle
1 Zug und Druck
Zugstab (Dehnsteifigkeit EA)
F
L0
d0
d0-d
A
L
F
unbelastet
belastet
Schnitt
EA
EA
L , k
L0
L0
2 Scherung
Scherstift (Schersteifigkeit GA)
A
F
w
τ
F
L
unbelastet
belastet
Schnitt
GA
GA
w, k
L
L
3 Biegung (Kragbalken [Cantilever beam])
Kragbalken (Biegesteifigkeit EIa, Länge L)
z
Schnitt
Zugsp.
x
F
w
M
Neutrale
Faser
Drucksp.
Schubsp.
Drucksp.
L3
L2
w
F
M,
3EI a
2 EI a
L2
L
F
M.
2 EI a
EI a
4 Torsion
Torsionsstab (Torsionssteifigkeit GIT)
M
M
L
0
τ
R
Länge L, Radius r
Schnitt
GIT
GI
, c T
L
L
Flächenmomente zweiten Grades [Second moment of area]
(alt: Flächenträgheitsmoment [Moment of inertia])
Vollkreis
Rechteck
D
h
Rohr
D d
b
Ia
Axiales Flächenmoment zweiten Grades (für Biegung):
b h3
4
12
Ia
64
Ia
D
64
(D4 d 4 )
Polares Flächenmoment zweiten Grades (für Torsion):
4
─
IT I P
32
D
IT I p
Zum Merken:
• Rechteckquerschnitt hochkant biegen höhere Steifigkeit
• Röhre bei gleicher Masse vgl. mit Vollstange höhere Steifigkeit
32
( D4 d 4 )