Leistungsfaktor-Controller sparen Energie - kgk
Werbung

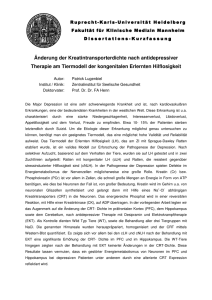
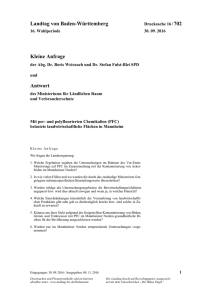
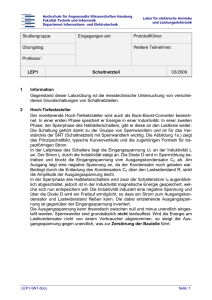
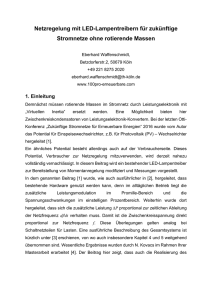
BAU ELEMENTE Elektromechanik Leistungsfaktor-Controller sparen Energie Günter Haas Schon im Grundstudium haben wir es gelernt: Je besser der Leistungsfaktor, um so geringer sind die Verluste in der Elektronik. Wie man diese altbekannte „Erkenntnis“ in die Praxis umsetzt und was man dabei beachten muss erfahren Sie zusammen mit der nötigen Theorie und Beispielen aus der Praxis in dem folgenden Beitrag. I n den letzten Jahren hat die Bedeutung des EC-Motors (elektronisch kommutierter Motor) stark an Bedeutung hinzugewonnen, weil er sich in erster Linie durch einen wesentlich höheren Wirkungsgrad als ein vergleichbarer Wechselstrommotor auszeichnet. Außerdem lassen sich EC-Motoren über analoge oder digitale Eingänge stufenlos steuern, während gleichzeitig komplexe Regelungen einfach integriert werden können und eine Vernetzung über einen Datenbus möglich ist. EC-Motoren weisen eine sehr hohe Lebensdauer auf, lassen sich einfach in ihrer Drehrichtung umkehren und verfügen über integrierte Schutzfunktionen wie Blockierschutz, UnterspannungsAbschaltung, Überwachung der Elektronik-Temperatur, Überwachung der Motortemperatur, Phasenausfall-Erkennung sowie Strombegrenzung. Zum 01.01.2001 trat die Norm EN61000-3-2 in Kraft. Diese Norm enthält die zulässigen Grenzwerte der Oberschwingungsanteile des Eingangsstromes elektronischer Geräte. Stromoberschwingungen erhöhen nämlich die Belastung des Versorgungsnetzes, denn sie sorgen für eine höhere Belastung des Versorgungsnetzes, für er- 50 höhte Verluste auf Grund von Blindleistung sowie für eine geringere Lebensdauer der Geräte, die durch erhöhte zeitliche Schwankungen des Kondensatorstromes verursacht werden. Zur Reduzierung der Oberschwingungsanteile wird ein Power-FactorController (PFC, Leistungsfaktor-Controller) eingesetzt. Prinzipiell wird zwischen aktivem und passivem PFC unterschieden. Grundprinzipien Die passive Lösung zur Unterdrückung der Stromoberwellen besteht in erster Linie aus einer Netzdrossel und zusätzlichen Filterkapazitäten. Passive Varianten sind in der Regel etwas kostengünstiger als aktive Varianten, benötigen aber mehr Raum auf der Elektronik, um einen ebenso guten Leistungsfaktor (= cos ϕ) wie bei einer aktiven Lösung zu erreichen. Bei Geräten, die aus dem Drehstromnetz gespeist werden, ist eine passive Lösung wesentlich kostengünstiger als eine aktive Lösung. Dies liegt an der gleichgerichten Wechselspannung. Bei einem Einphasennetz liegt der Momentan-Spannungsbereich der gleichgerichteten Spannung Udc zwischen 0 V Bild 1: Prinzipschaltbild eines aktiven Leistungsfaktor-Controllers Grafik: ebm Werke elektronik industrie 09-2002 BAU ELEMENTE Elektromechanik Bild 2 (links) und Bild 3 (rechts): Vergleich zwischen zwei Elektronik-Baugruppen, die am selben Arbeitspunkt betrieben werden Dabei ist bei der linken Schaltung der PFC ausgeschaltet und bei der rechten Baugruppe eingeschaltet. Grafik: ebm Werke und √2 Uac,eff. Der Momentan-Spannungswert der gleichgerichteten Spannung Udc bei einem Dreiphasennetz liegt zwischen 1,22 * Uac,eff und √2 Uac. Da die gleichgerichtete Spannung bei derartigen Anwendungen, die aus einem Dreiphasennetz gespeist werden, während des Betriebs nie auf 0 V absinken kann, können die Forderungen bezüglich der Oberschwingungen nach Norm EN61000-3-2 durch den Einbau einer Netzdrossel eingehalten werden. Durch einen aktiven PFC kann die Ausgangsgleichspannung, die im allgemeinen als Zwischenkreis-Spannung UZK bezeichnet wird, über einen Wert UZK > √2 Uac,eff angehoben werden. Der PFC arbeitet in diesem Fall als ein DC/DC-Wandler im HochsetzstellerModus. Zur Realisierung eines aktiven PFCs werden neben den passiven Komponenten noch ein schneller Leistungstransistor und eine schnelle Diode mit geringer Sperrerholungszeit (Boostdiode) benötigt. Die Schaltfrequenz des Leistungstransistors liegt im Bereich 40 kHz und 200 kHz. Es gibt zwei unterschiedliche Verfahren zur Realisierung eines PFCs. Funktionsweise Beim Verfahren 1 wird der Leistungstransistor mit einer festen Frequenz getaktet, die im Bereich zwischen 40 kHz und 80 kHz liegt. Bei Verfahren 2 wird der Transistor mit variabler Frequenz 40 kHz bis 200 kHz getaktet. Die Schaltfrequenz hängt hierbei von der Eingangsspannung und der Aufnahmeleistung ab. Die Schaltfrequenz wird geringer, wenn die Aufnahmeleistung stiegt, und sie wird höher, wenn die Eingangsspannung höher wird. Auf Grund der hohen Schaltfrequenzen kommt in einer derartigen Applikation ein MOSFET zur Anwendung. In Bild 1 52 PFCs zu verhindern. Wird die Spannung UDC,in größer als UZK, dann wird das durch das Regel-IC erzeugte PWM-Signal abgeschaltet und der Transistor wird im sperrenden Zustand gehalten. Dadurch erhöhen sich aber die Oberschwingungsanteile im Eingangsstrom. Wird der MOSFET eingeschaltet, so fließt ein Strom über die Speicherdrossel, den MOSFET und den Shunt nach Masse. Die Stromanstiegs-Geschwindigkeit wird durch die momentan anliegende Eingangsspannung UDC,in sowie die Drossel-Induktivität bestimmt. Die Messung des Magnetisierungs-Stroms wird über den Shunt-Widerstand realisiert. Eine Auswerteschaltung schaltet den MOSFET bei Überstrom ab und verhindert so das Ansteigen des Stromes über den Sättigungsstrom. Wird nun der elektronische Schalter geöffnet, so treibt die Speicherdrossel den Strom weiter und der Zwischenkreis-Kondensator wird über die BoostDiode geladen. Die Diode verhindert das Entladen des Kondensators bei eiBild 4: Die Frequenzspektren der Schaltungen aus nem erneuten EinGrafik: ebm Werke Bild 2 und Bild 3. schalten des MOSFETs. Über die VariPWM-Controller beinhaltet. Abhängig anz der Einschaltdauer des MOSFETs von der Gleichspannung UDC,in am Ein- kann der Eingangsstrom der Eingangsgang wird die Pulsbreite des PWM-Sig- spannung nachgeführt werden. nals zur Ansteuerung des PFC-Transistors geregelt. Messergebnisse Die Zwischenkreisspannung UZK wird über einen Spannungsteiler eingestellt, In den Bildern 2 und 3 ist ein Vergleich indem dem Regel-IC die aus dem Span- zwischen zwei Elektroniken, die am selnungsteiler resultierende Spannung ben Arbeitspunkt betrieben werden, UZK’ rückgeführt wird. Es ist darauf zu dargestellt. Dabei ist bei der ersten achten, dass die Spannung UZK größer Elektronik der PFC ausgeschaltet und als der Maximalwert der Eingangsspan- bei der zweiten Elektronik eingeschalnung Uac ist, um ein Abschalten des tet. In Bild 2 liegt der gemessene Leiist ein einfaches Prinzipschaltbild eines aktiven PFCs dargestellt. Die Frequenz der Eingangsspannung liegt bei fUdc,in = 2 * fUac. Um eine ausreichende Glättung der ZwischenkreisSpannung zu erzielen muss die Zwischenkreis-Kapazität CZK ausreichend groß gewählt werden. Eine Faustformel lautet hierbei 1 µF pro Watt Ausgangsleistung. Dies gilt jedoch nur bei Geräten, die an einem Einphasennetz betrieben werden. Der PFC führt den Eingangsstrom der sinusförmigen Eingangsspannung nach, so dass die Oberschwingungsanteile im Eingangsstrom stark reduziert werden. Kernstück des PFCs ist ein handelsübliches Regel-IC, wie es von verschiedenen Halbleiterherstellern angeboten wird, das im Wesentlichen einen elektronik industrie 09-2002 BAU ELEMENTE Elektromechanik stungsfaktor bei LF = 0,625 und in Bild 3 bei LF = 0,99. Aus den Messungen ergeben sich folgende Aufnahmeleistungen für die jeweilige Elektronik: Bild 2: P = U * I * LF = 207 V * 0,96A * 0,625 = 124,2 W Bild 3: P = U * I * LF = 207 V * 0,63A * 0,990 = 129,1 W Die Differenz der Aufnahmeleistung spiegelt den Wert der Verlustleistung wider, die durch den PFC verursacht wird. Der Stromverlauf in Bild 2 zeigt im Prinzip den Ladestrom des Zwischenkreis-Kondensators. Steigt die Spannung UDC,in über die momentane Spannung UZK an, so wird der Kondensator geladen. Nachdem die Spannung wieder unter die aktuelle Spannung UZK sinkt, ist der Ladevorgang beendet, der Strom geht wieder auf 0 zurück. In Bild 3 ist der Betrieb mit PFC dargestellt. Die Stromform wird nahezu identisch der Spannungsform Uac nachgebildet. In Bild 4 sind die beiden Frequenzspektren der in den Bildern 2 und 3 dargestellten Ströme zu sehen. Ein weiterer Vorteil des PFCs ist an den gemessenen Effektiv- und Maximalwer- ten des Eingangsstroms Iac zu sehen. Wie bereits beschrieben, wurden die Elektronik-Baugruppen im selben Arbeitspunkt betrieben. Bei Betrieb mit PFC ist sowohl der Stromspitzenwert, als auch der Effektivwert des Eingangsstromes geringer als bei einem Betrieb ohne PFC. Dieser Vorteil wirkt sich besonders bei Anlagen mit vielen einzelnen solcher Baugruppen aus. Unter anderem werden von ebm auch Reinraumanlagen, die in der Chipfertigung eingesetzt werden, mit Ventilatoren ausgestattet. Bei derartigen Anlagen werden zeitgleich mehrere tausend Ventilatoren am Versorgungsnetz betrieben, die alle über ein Bussystem miteinander verbunden sind. Um die Installationskosten und Betriebskosten solcher Anlagen niedrig zu halten, ist ein PFC von wesentlichem Vorteil. Der Leitungsquerschnitt der Versorgungsleitungen zu den einzelnen Ventilatoren kann kleiner gewählt werden als bei Ventilatorsteuerungen ohne PFC, da der Effektivwert des Eingangsstromes wesentlich kleiner ist. Auch können die Abschaltströme der Sicherungen kleiner gewählt werden. Diese beiden Faktoren beeinflussen im we- sentlichen die Installationskosten (Einmalkosten). Mit einer derartigen Busstruktur lassen sich mehrere tausend Geräte an einer Leitstation betreiben. Bei einer so großen Anlage ist ein Power-FactorController für jede Einzelelektronik unbedingt erforderlich, um die Oberschwingen beherrschen zu können. Werden die einzelnen Elektronik-Baugruppen nicht mit einem PFC ausgestattet, so muss der Anlagenbetreiber ein zentrales Entstörfilter einbauen. Ein derartiges Filter ist jedoch sehr voluminös und teuer. Außerdem können die Störungen, die durch die Oberschwingungs-Anteile der einzelnen Geräte verursacht werden, andere Geräte in der Anlage negativ beeinflussen, da sie nicht direkt am Entstehungsort herausgefiltert werden. ebm Werke 346 Dipl.-Ing. Günter Haas ist bei den ebm Werken GmbH & Co. KG im Bereich der Elektronikentwicklung für ECElektroniken zuständig.