pdf-file
Werbung

89
Mathematik für Biologen, Biotechnologen und Biochemiker
7.5. Dreiecks-Koordinaten und das Hardy-Weinberg-Gesetz
Betrachte die Ebene E = {(x, y, z) | x + y + z = 1} im R3 , sie schneidet die
Koordinatenachsen in den Punkten ~e1 = (1, 0, 0), ~e2 = (0, 1, 0) und ~e3 = (0, 0, 1). Insbesondere interessieren uns die Tripel (x, y, z) ∈ E mit nicht-negativen Koeefizienten;
sie bilden die Punkte (im Innern und auf dem Rand) des von den Vektoren ~e1 , ~e2 , ~e3
aufgespannten Dreiecks. Es gibt einige Situationen, in denen es wichtig ist die Menge
aller derartigen Tripel vor Augen zu haben, also die Menge
{(x, y, z) | x ≥ 0, y ≥ 0, z ≥ 0, x + y + z = 1}.
Statt mit diesem Dreieck im R3 zu arbeiten, betrachten wir ein gleichseitiges Dreieck
∆ im R2 und zwar verwenden wir ein Dreieck, dessen Höhe 1 ist. Warum? Es gilt
folgender Satz: Ist ein Punkt P in einem gleichseitigen Dreieck mit Höhe h gegeben,
fällen wir von P aus die Lote auf die drei Seiten, und haben diese Lote die Längen
x, y, z, so ist x + y + z = h. Der Beweis ist ganz einfach, siehe die Skizze zur Aufgabe 4 des
Übungszettels 13. Ordnen wir also jedem Punkt P des Dreiecks ∆ die Längen x, y, z der
Lote von P auf die Dreiecksseiten zu, so erhalten wir (alle) Tripel der Form (x, y, z) mit
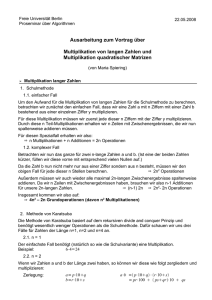
x ≥ 0, y ≥ 0, z ≥ 0, x + y + z = 1. Man nennt (x, y, z) die Dreiecks-Koordinaten (oder
die homogenen Koordinaten) des Punkts P . Hier folgt nun links ein entsprechendes
Koordinatensystem; mit einer Zehntel-Rasterung (die jeweiligen Schnittpunkte liefern
2
9
1
, 10
, . . . 10
, 1}); dabei
also alle Punkte (x, y, z) mit x + y + z = 1 und x, y, z ∈ {0, 10
sei x die Länge des Lots auf die Kante Y Z, entsprechend sei y die Länge des Lots
auf die Kante XZ und z diejenige auf die Kante XY . Rechts ist der Punkt mit den
3
Dreiecks-Koordinaten ( 21 , 51 , 10
) zusammen mit den drei Loten eingezeichnet.
Z
...
... ....
... .....
.
.
..... ....
... ... ... ...
... ..... ...
...... ......... ........
.
.
.. .. .. .. .. ..
... ...... ...... ...
....... ...... ...... .......
... .... .... .......... ..... .... ....
.
.
..
.
..
.
..... ..... ...... ..... .....
... .... ... .... .... ... ... .... .... ...
... ........ ....... ......... ........ ......
.
.
.
.. .. . .. .... . . . .. .. ..
.. ... ... ... ... ... ... .... .... ... .. ...
... ...... ..... ...... .... ...... ...
....... ......... ......... ......... ......... ......... .........
.
.
.. ... .. .. ... ........ ......... ......... ......... .....
..
..
..
..
.... ...... .....
..
....... ...... ...... ...... ....... ...... ....... .......
... ......... .......... .......... ......... .......... ......... ......... .....
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . .. . . . . . .. . .. . .. ......
... .... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...
..... ........ .......... ........ ......... .......... ........ ........ ......... .......
.
.
.. .. .. .. .. .. . .. .. .. .. .. .. .. .. ... .. .. .. ..
.. ... .. ... .. ... ... ... .. ... .. ... .. .... .. ... .. ... .. ...
... ..... ..... ..... ..... ..... ..... ..... ..... ..... ...
X
Z
...
... ....
.... . ......
.
.
.. . ....
... . . ...
... . . ...
.... . ..... . .......
.
.
.. . . . . ..
.... . ..... . ..... . ....
.... . . . . ....
.. .. .. .. .. .. .. .....
.
.
.
.
..... . ..... . ..... . ..... . .....
... . . . . . . . . .......
.... . ..... . ..... . ..... . ................. ......
.
.
.. . . . . . . . ...... . . ..
.. . . . . . . ........ . . . ...
... ... ... ......... ... ... ...
..................... .. . .. ................... . ... .. . .. ... . .......
.
.
.. .. .......... ........... .. .. . .. .. . .. ...
.... . . . . . ........... . . . . . . . . . . . . . . . . . ....
... . . . ..... . . . . . . . . . ...
... .. .. .. .. .... .. .. .. .. .. .. .. .. .. .. .....
.
.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..
.... . . . . ... . . . . . . . . . . .....
... . . . . . .. . . . . . . . . . . . ...
.... . ..... . ..... . ........ . ..... . ..... . ..... . ..... . ..... . ......
.
.
.. . . . . . .... . . . . . . . . . . . ..
.. . . . . . . .. . . . . . . . . . . . . ...
.... . ..... . ..... . ..... ... ..... . ..... . ..... . ..... . ..... . ..... . ....
x
y
z
Y X
Y
Beispiel 1. Drei Flüssigkeiten X, Y, Z wurden vermischt, wir bezeichnen mit
x, y, z den jeweiligen prozentualen Anteil; der Punkt in der rechten Zeichnung entspricht also dem Mischungsverhältnis (50%, 20%, 30%).
Beispiel 2. Bei einem Zufallsexperiment gebe es 3 mögliche Ergebnisse A, B, C;
mit pA , pB , pC bezeichnen wir die Wahrscheinlichkeit, dass das Ereignis A, bzw B, bzw
C eintritt. Dann gilt:
0 ≤ pA ≤ 1;
0 ≤ pB ≤ 1;
0 ≤ pC ≤ 1;
und
pA + pB + pC = 1.
Wir können das Tripel (pA , pB , pC ) also als Dreiecks-Koordinaten eines Punkts auffassen.
Leitfaden
90
Beispiel 3. Für ein Gen gebe es zwei Allele A, a, demnach gibt es die Genotypen AA, Aa, aa. Seien x, y, z die relativen Häufigkeiten, mit denen die Genotypen
AA, Aa, aa in einer vorgegebenen Population vorkommen. Wegen x + y + z = 1 können
wir das Tripel (x, y, z) als Dreiecks-Koordinaten eines Punkts ansehen. Aus der Verteilung der Genotypen kann man auf die Verteilung der Allele schließen: Ist p die relative
Häufigkeit des Allels A, und q die des Allels a, so ist
p=x+
y
2
und
y
q=z+ .
2
Im allgemeinen kann man dagegen aus der Kenntnis von p und q nicht auf die relativen
Häufigkeiten x, y, z schließen (In unserem Dreieck liefern alle Punkte, die auf einer
vertikalen Geraden liegen, das gleiche Zahlenpaar p, q).
Das Hardy-Weinberg-Gesetz wurde 1908 unabhängig voneinander von dem
englischen Mathematiker Hardy und dem deutschen Arzt Weinberg gefunden. Untersucht wird dabei die relative Häufigkeit der einzelnen Genotypen in der TochterGeneration. Vorausgesetzt wird folgendes: (1) Zufälliges Paarungsverhalten (das soll
heißen: Partnerwahl ist unabhängig vom Genotyp ); (2) Es gibt keine Selektionsmechanismen (die Lebenswahrscheinlichkeiten der verschiedenen Genotypen sind gleich);
und (3) Es treten keine Mutationen auf (Mutationen sind Änderungen des Genotyps).
Das Hardy-Weinberg-Gesetz besagt, daß unter diesen Voraussetzungen für die entsprechenden relativen Häufigkeiten x′ , y ′ , z ′ in der Tochter-Generation gilt:
x′ = p2 ,
y ′ = 2pq
und
z′ = q2 ,
insbesondere sieht man: die relativen Häufigkeiten der Genotypen in der TochterGeneration hängen nur von den relativen Häufigkeiten der Allele in der Eltern-Generation ab. Dabei ändern sich die relativen Häufigkeiten p, q der Allele nicht (denn
x′ + 21 y ′ = p2 + pq = p(p + q) = p, und entsprechend z ′ + 21 y ′ = q). Außerdem folgt:
(y ′ )2 = 4x′ z ′ .
Diese Bedingung besagt, daß das Tripel (x′ , y ′ , z ′ ) auf folgender Parabel liegt (dabei
haben wir das Koordinatensystem gedreht, um eine Parabel in der üblichen Lage zu
erhalten):
Y.........
Z
.
.... ....
... . . ...
... ..... ......
.
.
.. .. ..
... . . . . ...
... . . . . . . . . ...
... .. .. .. .. .. .. .....
.
.
.... ..... ..... ..... .....
... . . . . . . . . ...
... . . . ....................... . . . ...
..... ...................... .. .. .............................
.
.
.. . ........ . . . . . . . . . . . ........ ....
... ....... . . . . . . . . . . ....... ...
........ . . . . . . . . . . ..... ...
......... ..... ..... ..... ..... ..... ..... ............
.
.
..... . . . . . . . . . . . . . . ......
......... ..... ..... ..... ..... ..... ..... ..... ........
..... . . . . . . . . . . . . . . . . ......
..... ..... ..... ..... ..... ..... ..... ..... ..... .......
.
.
.
... ... ... ... ... ... ... ... ... ... ...
X
91
Mathematik für Biologen, Biotechnologen und Biochemiker
Wichtig: Kennen wir für einen Punkt (x, y, z) auf der Parabel einen der Werte
x, y, z, so auch die anderen zwei! Also: Ist A dominant, a rezessiv, so kann man die
Genotypen AA und Aa nicht unterscheiden, aber aus der relativen Häufigkeit z des
Genotyps aa kann man die relative Häufigkeit der beiden anderen Genotypen AA und
Aa berechnen!
Beweis. Wir betrachten folgende Aufstellung: in der ersten Spalte haben wir die Paarungsmöglichkeiten notiert, in der zweiten die relativen Häufigkeiten dieser Paarungen, daneben
dann jeweils die Aufschlüsselung nach den möglichen Genotypen der Tochter-Generation:
Paarungsmöglichkeit
rel.Häufigkeit
der Paarungen
AA × AA
AA × A a
AA × a a
A a × AA
x2
xy
xz
xy
AA A a a a
y2
yz
xz
yz
z2
Aa×Aa
Aa× aa
a a × AA
aa×Aa
aa× aa
x2
0
xy
2
xy
2
0
xz
xy
2
y2
4
xy
2
y2
2
yz
2
0
0
0
0
x′
Summe
0
0
0
0
y2
4
yz
2
xz
0
yz
2
yz
2
2
0
z
y′
z′
Addiert man die letzten drei Spalten auf, so erhält man die relativen Häufigkeiten x′ , y ′ , z ′ :
2
y2
= x + y2 = p2
4
2
xy + 2xz + y2 + yz = 2 x + y2
2
2
z 2 + yz + y4 = z + y2 = q 2
x′ = x2 + xy +
y′ =
z′ =
· z+
y
2
= 2pq
Dieses Tripel (x′ , y ′ , z ′ ) = (p2 , 2pq, q 2 ) erfüllt natürlich die Gleichung (y ′ )2 = 4x′ z ′ .
Insgesamt sehen wir: es stellt sich gleich in der Tochter-Generation ein Gleichgewicht ein, das in den weiteren Generationen erhalten bleibt: die Genotyp-Verteilung ist
ab der ersten Tochter-Generation durch die Häufigkeits-Verteilung der Allele eindeutig
bestimmt.
Aus der Gleichung (y ′ )2 = 4x′ z ′ folgt: Es ist
y′ ≤
1
2
,
also
x′ + z ′ ≥
1
2
d.h.: mindestens die Hälfte der Individuen sind homozygot (also Genotyp AA oder aa).
Leitfaden
92
7.6. Matrizen. Der Abschnitt Vektor-Geometrie kann nur ganz oberflächlich auf
einige wichtige Begriffsbildungen eingehen. Im Zentrum der Theorie steht der Begriff
der “Matrix”, auf den hier nur unzureichend hingewiesen werden kann, dessen Relevanz
aber wenigstens kurz vorgestellt werden soll. Was ist eine Matrix? Wenn man von
Matrizen spricht, so immer von m × n Matrizen, also von Matrizen mit m Zeilen und n
Spalten (wie bei Vektoren: ein Vektor ist immer ein Vektor im n-dimensionalen Raum,
mit einem festen n, bei Matrizen sind nun zwei natürliche Zahlen n, m fixiert): eine
solche m × n Matrix ist ein Zahlenschema in Form eines Rechtecks, also von der Form
A = (aij ) mit Zahlen aij ∈ R, dabei ist 1 ≤ i ≤ m und 1 ≤ j ≤ n — nichts mehr und
nichts weniger, also zum Beispiel ist dies eine 2 × 3 Matrix:
0
1
2
5
−3
2
1
manchmal verwendet man außen, wie hier, eckige Klammer [ ] , manchmal auch runde
( ), sie dienen nur dazu, die gegebene Matrix klar zu abzugrenzen; eine derartige Matrix kann man auf ganz verschiedene Weisen interpretieren: als zwei (Zeilen-)Vektoren
im R3 , nämlich (0, 5, 2) und ( 21 , −3, 1), die untereinander geschrieben sind, oder auch
5
und 21 , die nebeneinander geals drei (Spalten-)Vektoren im R2 , nämlich 01 , −3
2
schrieben sind. Was zählt ist nur die Tatsache, dass es ingesamt 6, oder genauer 2 × 3
∗ ∗ ∗
Zahlen gibt, deren Positionen fixiert sind: ein Zahlenschema der Form
, wobei
∗ ∗ ∗
an jeder Position (hier durch ein ∗ markiert) eine Zahl steht; die Positionen werden
durch Paare (i, j) mit 1 ≤ i ≤ 2 (der Zeilenindex) und 1 ≤ j ≤ 3 (der Spaltenindex)
bezeichnet; jedem solchen Paar (i, j) ist eine Zahl aij zugeordnet.
Jedes Tabellenkalkulations-Programm, wie etwa EXCEL, arbeitet mit Matrizen:
Ein Tabellenblatt ist einfach eine Matrix, und innerhalb eines Blatts werden
üblicherweise rechteckige Bereiche betrachtet, auch dies sind dann Matrizen. Bei
EXCEL verwendet man allerdings eine andere Konvention zur Bezeichnung der
Einträge der Matrix: statt vom Element aij mit dem Zeilenindex i und dem Spaltenindex j zu sprechen, werden die Positionen (also die Zellen) in der Form C3
oder E7 notiert: hier werden die Spaltenindizes mit Großbuchstaben (A,B, . . . )
bezeichnet, die Zeilenindizes sind Nummern (und ganz wichtig: die Reihenfolge
ist umgekehrt: erst kommt der Buchstabe, also der Spaltenindex, danach der Zeilenindex — im Gegensatz zur mathematischen Konvention, wo bei der Position
(i, j) das i auf den Zeilindex und j auf den Spaltenindex verweist).
Also: Matrizen sind gar nichts Kompliziertes: es sind einfach Zahlenschemata. Komplizierter wird es erst, wenn von Matrix-Operationen die Rede ist, nämlich vom Matrizenprodukt, vom “Invertieren” und “Diagonalisieren” von Matrizen, von der Frage
nach den “Eigenvektoren” und “Eigenwerten”, . . . .
93
Mathematik für Biologen, Biotechnologen und Biochemiker
Was also macht man mit Matrizen? Man kann Matrizen A, B gleicher Größe addieren (komponentenweise, wie bei der Vektor-Addition, man schreibt A + B für die
Summe), man kann jede Matrix A mit einer Zahl multiplizieren (ebenfalls wie bei Vektoren: jeder Eintrag der Matrix wird mit der gleichen Zahl λ multipliziert, und man
schreibt λA für das Ergebnis), dies sind die unproblematischen Operationen.
Wichtig (aber auf den ersten Blick recht kompliziert wirkend) ist die MatrizenMultiplikation: Sei A = (aij )ij eine m × n Matrix und B = (bjk )jk eine r × s Matrix.
Das Produkt AB ist nur dann definiert, P
falls n = r gilt, es ist eine m × s Matrix, und
n
zwar die Matrix AB = (cik )ik mit cik = j=1 aij bjk (es ist also cik das innere Produkt
der i-ten Zeile von A mit der k-ten Spalte von B).
Dieses Matrizenprodukt ist assoziativ (es gilt also (AB)C = A(BC) für beliebige
Matrizen A, B, C, für die die Produkte AB und BC definiert sind – es muß also
die Spaltenzahl von A gleich der Zeilenzahl von B und die Spaltenzahl von B
gleich der Zeilenzahl von C sein). Beachte: Das Produkt ist üblicherweise nicht
kommutativ: sind A, B Matrizen und ist AB das Produkt von A und B, so muss
die Spaltenzahl von A gleich der Zeilenzahl von B sein – ist die Zeilenzahl von
A aber verschieden von der Spaltenzahl von B, so ist das Produkt BA gar nicht
definiert; selbst wenn A und B quadratische Matrizen sind, so dass also die beiden
Produkte AB und BA definierth sind,
i
i BA
h meist
i h und
h AB
i h so isindhdie iProdukte
10
01
01
0 1
1 0
verschieden, typisches Beispiel: 0 0 0 0 = 0 0 , aber 0 0 0 0 = 00 00 .
Hier nun einige Situationen, die Matrizen liefern! Dabei soll jeweils auch
die Bedeutung der Matrizen-Multiplikation herausgearbeitet werden.
• Das Lösen linearer Gleichungssysteme. Dem Gleichungssystem
1
2x
+5y
−3y
+2z
+z
ordnet man seine Koeffizientenmatrix zu:
0 5
1
−3
2
= 9,
= 5
2
1
Mit Hilfe von Matrix-Operationen kann man nun ganz formal alle möglichen Lösungen
dieses Gleichungssystems bestimmen. Die linke Seite des Gleichungssystems
entsteht
gerade, wenn man die Koeffizientenmatrix mit dem Spaltenvektor
x
y
z
multipliziert.
• Abbildungsmatrizen. Die sogenannten “linearen Abbildungen” R2 → R2 (also
zum Beispiel Drehungen um den Ursprung, oder Spiegelungen, bei denen der Ursprung
auf der Spiegelachse liegt) werden durch 2×2 Matrizen beschrieben. Entsprechend werden die “linearen Abbildungen” R3 → R3 (auch hier gibt es wieder als typische Beispiele Drehungen und Spiegelungen) durch 3 × 3 Matrizen beschrieben. Mit Hilfe von
2 × 3 Matrizen können Abbildungen R3 → R2 behandelt werden, vor allen von Interessen sind hier Projektionen des 3-dimensionalen Raums auf die Ebene (Zeichenblatt,
Bildschirm, . . . ).
Leitfaden
94
Bei den Abbildungsmatrizen entspricht der Hintereinanderschaltung zweier Abbildungen die Matrizen-Multiplikation.
• Koordinatenwechsel. Arbeitet man zum Beispiel im R2 mit zwei verschiedenen Koordinatensystemen, die beide den gleichen Ursprung haben, so wird der Koordinatenwechsel durch eine 2 × 2 Matrix beschrieben.
Führt man nacheinander zwei Koordinatenwechsel durch, so sind die Matrizen,
die diese Koordinatenwechsel beschreiben, miteinander zu multiplizieren.
• Produktionsprozesse. Ein Betrieb stelle aus den Rohstoffen R1 , R2 , R3 zuerst
Zwischenprodukte Z1 , Z2 , und aus diesen Zwischenprodukten die Endprodukte E1 , E2
her. Folgendes Bild gibt an, wieviele Einheiten der Rohstoffe für die Herstellung der
Zwischenprodukte und wieviele Zwischenprodukte für die Endprodukte gebraucht werden:
..............................
..............................
..............................
..
..
..
...
...
...
.. R2 ....
.. R3 ....
.. R1 ....
...........................
............ ...............
..............................
.
.
.
.
.
.
.
............
.
... ...
...........
... ........
... ......
....... ..
... ........0
....... ....
...4 .....3
........ 1......
...
.......... ..
..........
...
..
.
.
.
2 ....
.. 5
.... ......................... ......
.
...
.
...
... ..
............. ............................... ............................... ............
.. ... ........
.........................................
...
....
.................................
..
..
.
..
.. Z2 ....
.. Z1 ....
............................
.............................
........
.
.
.
... ......
..... ..
......2
...... ....
...
...... .4
.....
...
....
...............
.
.
... 3
..
1 ...
...... ...........
........ .......
......... .............
.
.
.
.... ............
.
.
.
.
.
... . ....
..................................
...............................
..
..
...
...
.
... E
.
1 ....
.... E2 ....
..
..........................
...........................
Man arbeitet hier mit den beiden Matrizen
2 1 3
und
0 4 5
1 4
,
2 3
die erste Matrix beschreibt den Produktionsprozess zur Herstellung des Zwischenprodukts, die zweite den zur Herstellung des Endprodukts aus den Zwischenprodukten.
Das Produkt der Matrizen
1 4
2 1 3
2 17 23
·
=
2 3
0 4 5
4 16 21
liefert eine Beschreibung des Gesamtprozesses: die Einträge geben an, wieviele Einheiten der Rohstoffe für die Herstellung der zwei Endprodukte gebraucht werden.
Derartige Schemata treten auch sonst auf: zum Beispiel seien R1 , R2 , R3 drei
mögliche Nahrungsquellen, Z1 , Z2 zwei Tierarten, die davon Gebrauch machen (die
Zahlen bezeichnen den Verbrauch), schließlich seien E1 , E2 Aufenthaltsgebiete für diese Tiere (die Zahlen stehen für den Bestand). Dann liefert das Matrizenprodukt den
Verbrauch der Nahrungsarten in den jeweiligen Gebieten.
95
Mathematik für Biologen, Biotechnologen und Biochemiker
• Populationsentwicklung. Klassisches Beispiel ist die Rekursion zur Erzeugung der Fibonacci-Zahlen: Fibonacci stellte 1202 folgendes Modell für das Wachstum
einer Kaninchen-Population auf: Jedes Paar erwachsener Kaninchen wirft pro Monat
ein Paar Junge. Diese werden nach einem Monat erwachsen und werfen dann ebenfalls
pro Monat ein Paar Junge; nicht berücksichtigt werden Abgänge (also Tod, Unfruchtbarkeit). Bezeichnen wir mit at die Anzahl der Kaninchenpaare zum Zeitpunkt t (in
Monaten), so ist at+1 = at + at−1 (zum Zeitpunkt t + 1 gibt es neben den bisherigen
at Kaninchenpaaren zusätzlich die von den zum Zeipunkt t − 1 schon lebenden Kaninchenpaaren geworfene Paar Junge (und das sind at−1 Paare). Beginnen wir mit einem
Jungpaar zum Zeitpunkt t = 0, also mit a0 = 1, so ist auch a1 = 1; insgesamt erhält
man die Fibonacci-Folge
1, 1, 2, 3, 5, 8, 13, ...
(sie spielt in der Biologie in ganz verschiedenen Zusammenhängen eine Rolle!). Die
Gleichung at+1 = at + at−1 liefert die Matrizen-Gleichung:
at
at+1
0 1
at−1
=
·
.
1 1
at
Man kann auch mit bt die Anzahl der erwachsenen Kaninchenpaare zum Zeitpunkt t
bezeichnen und erhält:
bt+1
0 1
b
=
· t .
at+1
1 1
at
Hier ein zweites Beispiel: Das folgende Pfeildiagramm beschreibe die monatliche
Entwicklung einer Population aus Käfern, Larven und Eiern:
8
........................................................................................................................................................................................................................
...
...
...
..
...
..........
.
..............................................
.............................................
..................................................
.
..
.
.
.
...
...
...
0,25
0,5
.
.
.
.
...
.
.
.
.
...
..........................................................................
.........................................................................
..
..
...
...
.
...
...
...
.
.
.
.
...........................................
..........................................
.........................................
Eier
Larven
Käfer
dies bedeutet: aus 25 % der Eier entstehen Larven (die anderen werden von Tieren
gefressen oder verenden), aus der Hälfte der Larven werden Käfer, diese legen 8 Eier
(und sterben dann).
Ist eine Population aus x Eiern, y Larven und z Käfern gegeben, so nennt man
(x, y, z) einen Zustandsvektor und das Matrizenprodukt
0
0 8
x
8z
0, 25 0 0 · y = 0, 25 x
0
0, 5 0
z
0, 5 y
beschreibt den Zustand nach einem Monat: die Multiplikation des Zustandsvektors
zum Zeitpunkt t mit der 3 × 3 Matrix liefert den Zustandsvektor zum Zeitpunkt t + 1.
Leitfaden
96
• Stochastische Matrizen. Auch hier betrachten wir einen dynamischen Prozess, es gebe zum Beispiel zwei (physikalische, chemische, ...) Zustände Z1 , Z2 , und
folgende Übergangswahrscheinlichkeiten (für den Übergang vom Zeitpunkt t zum Zeitpunkt t + 1):
......
......
.... ...........
......... ..............
.......
....
.....
....
.....
..........................
...
0,1 .... ..............................
...
...
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
....
.
...
.... ...
.
..0,8
.
.
.
0,9...
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 ... .....
2 ..
...
...
...
...
.
.
..........................
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0,2
.
.
.
.
.
.
.
.....
.. .
.
..........
......... ...............
...........................
......
Z
Z
die zugehörige Matrix lautet
0, 9 0, 2
A=
0, 1 0, 8
z Auch hier kann man mit einem Zustandsvektor z12 beginnen (zum Zeitpunkt t), das
z1 Matrizenprodukt A · z2 liefert dann den Zustandsvektor zum Zeitpunkt t + 1. Man
nennt eine solche Matrix eine “stochastische’ ’ Matrix: alle Koeffizienten sind nichtnegativ, und alle Spaltensummen sind gleich 1; stochastische Matrizen spielen in der
Wahrscheinlichkeitstheorie eine wichtige Rolle.
Bei den dynamischen Systemen (Populationsentwicklungen, stochastischen Übergängen) sind es vor allem quadratische Matrizen, mit denen man arbeitet, und es sind
deren Potenzen, die eine wichtige Rolle spielen: Untersucht wird auf diese Weise das
langfristige Verhalten, also die Frage, wie sich die betrachteten Prozesse stabilisieren.
Gesucht sind Grenzverteilungen, also “Eigenvektoren” der gegebenen Matrix.
Potenzen einer quadratischen Matrix zu berechnen ist gar nicht so einfach, denn
man erhält bei höheren Potenzen viele Summen von Produkten . . . . Einfach ist es,
wenn es sich um eine Diagonalmatrix handelt, also um eine
Matrix
i
h quadratische
a11 0
, so gilt An =
A = (aij ) mit aij = 0 für i 6= j. Ist zum Beispiel A =
0 a22
h n
i
a11
0
, es werden also nur die entsprechenden Potenzen der Koeffizienten a11 und
0 a22 n
a22 berechnet. Leider sind die Matrizen, die in Anwendungen auftreten, meist keine
Diagonalmatrizen, oft kann man sie aber mit gewissen Tricks durch Diagonalmatrizen
ersetzen (man versucht,
So gehört zur
izu “diagonalisieren”).
h
h i eine vorgegebene Matrix
√
a 0
01
Fibonacci-Matrix 1 1 die Diagonalmatrix 0 a′ , mit a = 21 (1 + 5) und a′ = 12 (1 −
√
5).