Partikelmethoden
Werbung

Technische Universität Bergakademie Freiberg
Fakultät für Geowiss., Geotechnik und Bergbau
Institut für Geotechnik
Lehrstuhl für Felsmechanik
Partikelmethoden
- Eine Übersicht -
DEM-Simulation eines Schneidprozesses (Quelle: Lehrstuhl für Felsmechanik, TU BAF)
Dipl.-Geophys. Christian Jakob,
Prof. Dr.-Ing. habil. Heinz Konietzky
Freiberg, den 23. Oktober 2012
Inhaltsverzeichnis
1 Einleitung
2 Diskrete Elemente
2.1 Kontaktdetektion . .
2.2 Kontaktgesetze . . .
2.3 Physik DEM-Partikel
2.4 Zeitintegration . . .
2.5 Komplexere Ansätze
2.6 Beispiele . . . . . . .
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
6
8
8
10
3 Smoothed Particles
12
3.1 Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Physik SPH-Partikel . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4 Lattice Boltzmann
15
4.1 Boltzmann Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2 Zeitrelaxation nach Bhatnagar, Gross und Krook . . . . . . . . . 16
4.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5 Molekulardynamik
5.1 Schrödingergleichung
5.2 Potentiale . . . . . .
5.3 Physik MD-Partikel .
5.4 Beispiele . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Literatur
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
19
19
20
21
22
1
1
Einleitung
Was sind Partikelmethoden?
Numerische Berechnungsverfahren lassen sich prinzipiell einteilen in:
- Explizite und implizite Verfahren bzgl. der zeitlichen Diskretisierung
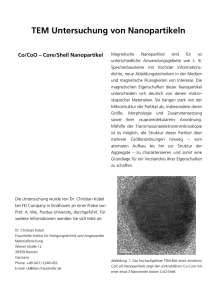
- Kontinuumsmechanische (netzbehaftete) und diskontinuumsmechanische
(netzfreie) Verfahren bzgl. der räumlichen Diskretisierung
Alle Verfahren können unabhänging von der räumlichen Diskretisierung als implizite oder explizite Berechnung ausgeführt werden. Typische Vertreter der netzbehafteten Verfahren sind die FEM (Finite-Elemente-Verfahren), die REM (RandElemente-Verfahren) oder auch die VEM (Volumen-Elemente-Verfahren). Typische Vertreter der netzfreien Methoden sind die DEM (Diskrete-ElementeMethode), die SPH (Smooth-Particle-Hydrodynamics) oder auch die MD
(Molecular-Dynamics).
Während bei der klassischen Kontinuumsmechanik der Zusammenhalt des Körpers (Kontinuum) erhalten bleibt (Nachbarschaftsbeziehungen bleiben erhalten
bzw. werden vordefiniert), erlaubt die Diskontinuumsmechanik die Betrachtung
der Wechselwirkung mehrere einzelner Körper (Kontinua). Dafür benötigen diese
Methoden einen automatischen Kontakt-Detektions-Algorithmus sowie entsprechende Kontaktstoffgesetze, die bei Wechselwirkung (physisch oder als Feldkraft
über weitere Entfernungen) aktiv werden.
Abbildung 1: Modellbeispiele für finite (links) und diskrete Elemente (rechts)
(Quelle: Lehrstuhl für Felsmechanik, TU BAF)
Wo finden Partikelmethoden Anwendung?
-
Simulation granularer Medien und Festgesteine (DEM)
Fluidsimulation (SPH, LBM)
Simulation von Molekülen und Nanopartikeln (MD)
Berechnungen in der Astrophysik (SPH)
2
2
Diskrete Elemente
Die Diskrete-Element-Methode (DEM) ist eine Partikelmethode, die auf den
Newton’schen Bewegungsgesetzen basiert. Die Partikel können sich mit sechs
Freiheitsgraden bewegen (drei für die Translation und drei für die Rotation).
Die Partikel sind starr und somit nicht deformierbar. Prinzipiell können die Partikel jede beliebige geometrische Form haben, wobei die Kugelform numerisch
am effizientesten ist. Wenn sich Partikel berühren wirken Kräfte, die vom Kontaktgesetz abhängig sind. Weiterhin können äußere Kräfte (z.B. Gravitation) auf
die Partikel wirken. Während einer Modellrechnung können sich Kontakte bilden
oder auflösen. Daher ist eine effiziente automatische Kontaktdetektierung eine
der Kernkomponenten einer DEM-Software.
Die Modellierung mit diskreten Elementen erfolgt in sechs Phasen:
1.
2.
3.
4.
Generierung der Partikel + Definition der Rand- und Anfangsbedingungen
Ermittlung der Kontakte (zw. Partikeln und zw. Partikel und Rand)
Berechnung der Kräfte F und der Momente M aller Partikel
Berechnung der Beschleunigungen ü und ω̇, der Geschwindigkeiten u̇ und
ω, und der Verschiebungen u und Rotation aller Partikel
5. Berechnung der neuen Positionen x aller Partikel
6. Punkt 2. bis 5. in jedem Zeitschritt ∆t bis zum Abbruchkriterium wiederholen
Pionierarbeit bei der Entwicklung von diskreten bzw. distinkten Elementen leistete hauptsächlich Peter A. Cundall, der in zahlreichen Publikationen die Methode
immer weiter verbessert und erweitert hat. Seit 1995 ist die DEM-Software PFC
(Particle Flow Code) der Firma Itasca auf dem Markt. Es lassen sich damit
sowohl zweidimensionale (PFC2D), als auch dreidimensionale (PFC3D) Modelle
rechnen. In der folgenden Beschreibung wird sich ausschließlich auf diese Software
bezogen.
2.1
Kontaktdetektion
Der Rechenaufwand zur Kontaktermittlung steigt quadratisch mit der Anzahl
der Partikel im Modell. Daher ist es notwendig einen rechenzeitoptimierten Algorithmus für die DEM zu verwenden. Dabei werden im ersten Schritt alle nichtmöglichen Kontakte in einer Vorsortierung ausgeschlossen. Im zweiten Schritt
wird dann genauer (und somit rechenintensiver) berechnet, ob die restlichen möglichen Kontakte wirklich vorhandene Kontakte sind. Bei wirklich vorhandenen
Kontakten (engl. real contacts) wird das Kontaktgesetz angewendet, um die auf
die Partikel wirkenden Kontaktkräfte zu berechnen (s. Abschnitt 2.2).
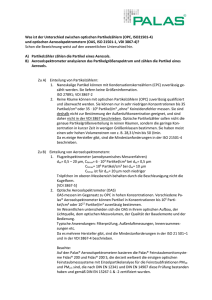
Man unterscheidet bei der Vorsortierung, die mögliche von nicht-möglichen Kontakten trennt, in zellenbasierte Methoden und Methoden mit Verlet-Listen. Zellenbasierte Methoden teilen das Modell in kleinere Zellen auf, die parallel zu
den Raumachsen sind (engl. axis-aligned bounding box). Je grösser eine Zelle
ist, desto mehr mögliche Kontakte werden vorsortiert. Dadurch erhöht sich der
Rechenaufwand. Je kleiner die Zellen sind, desto mehr Zellen müssen durchsucht
3
werden, wodurch ebenfalls mehr Rechenzeit benötigt wird. In den meisten DEMCodes wird deshalb bei Initialisieren eines Modells die optimale Zellengröße durch
ein heuristisches Verfahren abgeschätzt. Bei der Methode mit Verletlisten wird
jedem Partikel ein Beobachtungsradius zugeordnet, in dem sich alle möglichen
Kontaktpartner finden.
~r
Abbildung 2: Zellenbasierte Methode (links) und Methode mit Verlet-Listen (rechts)
2.2
Kontaktgesetze
Bei Kontakt zweier Partikel werden die wirkenden Kräfte nach einem Kontaktgesetz (auch Stoffgesetz genannt) berechnet. Kontaktgesetze werden aus verschiedenen Basiselementen zusammengebaut, die mit einem Schaltplan visualisiert
, der
werden können. Die Basiselemente sind dabei die Feder (engl. spring)
und der Reibungswiderstand (engl. frictional
viskose Dämpfer (engl. dashpot)
slider, frictional resistance oder auch shear slider)
. Im einem rein elastischen
Gesetz wird die Kontaktkraft durch zwei Federn mit den Steifigkeiten kn (für die
Normalrichtung) und ks (für die Scherrichtung) beschrieben (s. Abb. 3).
Partikel 2
Partikel 2
kn
ks
Partikel 1
Partikel 1
Abbildung 3: Elastisches Kontaktgesetz
Die Normalkontaktkraft Fn ist beim linear-elastischen Kontaktgesetz das Produkt aus der konstanten Normalsteifigkeit kn und dem Überlappungsbetrag un .
Fn = kn un
(1)
Die aktuelle Scherkontaktkraft Fsneu ergibt sich aus der Summe der Scherkontaktkraft des vorhergehenden Zeitschritts Fsalt und ∆Fs .
Fsneu = Fsalt + ∆Fs
mit
∆Fs = −ks · ∆us
(2)
Beim nicht-linearen Hertz-Mindlin-Kontaktgesetz werden die Steifigkeiten kn und
ks in Abhängigkeit von den Eingangsparametern Schermodul G und Poissonverhältnis ν, den Radien der Partikel R1 und R2 und dem Überlappungsbetrag un
4
berechnet.
√
G 2Rd √
kn =
un
(1 − ν)
mit Rd =
1
ks =
2 (3G2 (1 − ν)Rd ) 3
2−ν
2R1 R2
R1 + R2
(3)
!
1
· (Fn ) 3
(4)
Jedes mechanische System „verliert“ Energie (z.B. in Form von Wärme durch
Reibung oder plastischer Verformung). Um den Energieverlust beim Kontakt
von Partikeln im Modell zu berücksichtigen, wird im Kontaktgesetz ein Dämpfungselement parallel zur Feder geschaltet. Im Falle einer Scherung geht Energie
aufgrund der Gleitreibung verloren. Daher wird im Kontaktgesetz zusätzlich ein
Reibungswiderstand in Reihe geschaltet (s. Abb.4).
Partikel 2
Partikel 2
cs
kn
µ
cn
ks
Partikel 1
Partikel 1
Abbildung 4: Kontaktgesetz mit viskoser Dämpfung und Reibungswiderstand
Die Dämpfung wirkt geschwindigkeitsproportional auf die Normalkontaktkraft
Fn , wodurch diese um den Anteil der viskosen Dämpfung cn u̇n ergänzt wird.
Fn = kn un − cn u̇n
(5)
Im gedämpften Fall setzt sich die zu aktualisierende Scherkontaktkraft ∆Fs aus
ks ∆us und dem Anteil der viskosen Dämpfung cs ∆u̇s zusammen.
∆Fs = −ks · ∆us − cs · ∆u̇s
(6)
Dabei sind cn und cs die Normal- und Scherdämpfungskoeffizienten. cn (bzw. cs )
ist das Produkt aus dem Dämpfungsverhältnis βn (bzw. βs ) und der kritischen
Dämpfungskonstante ckrit
(bzw. ckrit
n
s ). Es gilt
p
(7)
cn = βn ckrit
= 2βn mkn ,
n
wobei m die effektive Systemmasse ist. Die Berechnung für cs erfolgt analog.
Das Gleitverhalten bei Scherbewegung wird durch den Reibungskoeffizienten µ
beschrieben. µ ist definiert als das Verhältnis aus maximaler Scherkontaktkraft
Fsmax und Normalkontaktkraft und limitiert im Falle des Gleitens die Scherkontaktkraft auf
Fsmax = µ |Fn | .
(8)
5
2.3
Physik DEM-Partikel
Im Folgenden wird sich aus Gründen der Übersichtlichkeit auf die Betrachtung
eines Kontaktes zwischen zwei Partikeln beschränkt. Die verwendeten Bezeichnungen sind in Abb. 5 dargestellt.
R2
R1
un
~n
~x1
~t ~xc
~x2
da
Abbildung 5: Kontakt zweier Partikel im PFC-Modell
Die Vektoren ~x1 und ~x2 sind die Ortsvektoren zu den Mittelpunkten der Partikel
und ~n und ~t bezeichnen den Normal- bzw. Tangenteneinheitsvektor. Aus der in
Abb. 5 gezeigten Geometrie ergeben sich folgende Zusammenhänge.
da = |~x2 − ~x1 |
~n =
~x2 − ~x1
da
un = R1 + R2 − da
(9)
Der Ortsvektor des Kontaktpunkts ~xc ergibt sich dann wie folgt.
~xc = ~x1 + (R1 − 1/2 · un ) · ~n
(10)
Mit den Steifigkeiten kn und ks werden die Normal- und die Scherkomponente
der Kontaktkraft Fc ermittelt. Die Normalkomponente wird direkt bei Kontaktbildung errechnet. Die Scherkomponente ist bei Kontaktbildung Null. Sie wird
bei jedem Zeitschritt um ∆Fs vergrößert (bzw. verkleinert).
∆Fs = −ks · ∆us
und Fn = kn un
(11)
Der Scherverschiebungsanteil bei jedem Zeitschritt ∆us wird am Ende des Abschnitts in Gl. (21) beschrieben. Die Kontaktkraft zwischen zwei Partikeln wird
dann durch
F~c = Fn · ~n + Fs · ~t
(12)
bestimmt. Die Gesamtkraft F~ (=
ˆ Fi ), die auf ein Partikel wirkt, setzt sich zusammen aus der Summe aller Kontaktkräfte durch die Nachbarpartikel und der
Schwerkraft F~g = m · ~g .
X
F~ =
F~c + F~g
(13)
c
6
Die Gesamtkraft in i-Richtung (i ∈ {1, 2, 3}) Fi , die auf ein Partikel wirkt, wird
nach dem zweiten Gesetz von Newton (Gesetz der Dynamik einer Masse) bestimmt. Sie berechnet sich durch Multiplikation der Masse m des Partikels mit
der Summe seiner Beschleunigungen (üi und gi ).
Fi = m · (üi + gi )
(14)
Nach Umstellen der Gleichung (14) ergibt sich
üi =
Fi
− gi .
m
(15)
Durch zweifache Integration nach der Zeit t wird die Geschwindigkeit u̇i und die
Verschiebung ui bestimmt.
Z
Z
u̇i = üi dt und ui = u̇i dt
(16)
Für die Beschreibung der Rotationsbewegung wird der Vektor ~rc eingeführt. Er
verbindet das Zentrum des Partikels mit dem Punkt, wo die Kontaktkraft F~c am
~ ergibt sich somit aus folgender Beziehung.
Partikel angreift. Das Drehmoment M
X
~ =
~rc × F~c
mit ~rc = ~xc − ~x und ~x = ~x1 (für Partikel 1) (17)
M
c
Das Drehmoment in i-Richtung Mi wird aus Multiplikation des Trägheitsmoments J mit der Winkelbeschleunigung ω̇i bestimmt.
Mi = J · ω̇i
(18)
Da alle Partikel Kugeln sind, ist das Trägheitsmoment gegeben durch J = 2/5 ·
mR2 . Durch Umstellen und Integration nach t ergibt sich die Winkelgeschwindigkeit ωi des Partikels.
Z
5Mi
ωi =
dt
(19)
2mR2
Mit den ermittelten Geschwindigkeiten ~v1 =
ˆ u̇i1 und ~v2 =
ˆ u̇i2 und den Winkelgeschwindigkeiten ω
~ 1 und ω
~ 2 wird nun die Relativgeschwindigkeit ~vrel errechnet.
~vrel = (~v2 + ω
~ 2 × (~xc − ~x2 )) − (~v1 + ω
~ 1 × (~xc − ~x1 ))
(20)
Der Scherverschiebungsanteil bei jedem Zeitschritt ∆us aus Gl. (11) wird aus
Multiplikation der Schergeschwindigkeit vs mit der Schrittweite ∆t bestimmt.
vs wiederum berechnet sich aus der Relativgeschwindigkeit vrel = |~vrel | durch
Subtrahieren der Normalgeschwindigkeit.
∆us = vs ∆t mit vs = vrel − vn
7
und vn = |~vrel · ~n|
(21)
2.4
Zeitintegration
PFC berechnet die Geschwindigkeiten ẋi und ωi zu den mittleren Zeitintervallen
t ± n∆t/2 und die Werte für xi , ẍi , ω̇i , Fi und Mi zu den primären Intervallen
t ± n∆t. Die numerische Lösung der Integrationen aus Gl. (16) und (19) erfolgt
über die zentralen Differenzenquotienten
(t+∆t/2)
(t−∆t/2)
(t)
1
und
u̇i
− u̇i
üi = ∆t
(22)
(t)
ω̇i
=
1
∆t
(t+∆t/2)
ωi
−
(t−∆t/2)
ωi
.
Aus den Gleichungen (22), (15) und (18) werden die „neuen“ Geschwindigkeiten
zum Zeitpunkt t + ∆t/2
!
(t)
Fi
(t+∆t/2)
(t−∆t/2)
u̇i
= u̇i
+
+ gi ∆t und
m
(23)
!
(t)
5Mi
(t−∆t/2)
(t+∆t/2)
+
= ωi
ωi
∆t
2mR2
und die „neuen“ Partikelpositionen zum Zeitpunkt t + ∆t bestimmt.
(t+∆t)
xi
(t)
(t+∆t/2)
= xi + u̇i
∆t
(24)
Mit den neuen Positionen der Partikel werden, wieder bei Gl. (9) beginnend,
die Kräfte und Verschiebungen für den nächsten Zeitschritt berechnet. Für eine
vollständige numerische Beschreibung des Bewegungs- und Kontaktverhaltens
wird auf das Handbuch Itasca (2008) verwiesen.
2.5
Komplexere Ansätze
Die auf starren Kugeln basierenden Partikelansätze können in mehrfacher Hinsicht erweitert werden:
Clumps können aus zwei oder mehreren Partikeln gebildet und damit komplexere Partikelformen erzeugt werden.
Abbildung 6: Beispiele für clumps erzeugt durch sich überlappende Kugeln (Quelle:
Lehrstuhl für Felsmechanik, TU BAF)
8
Bonds sind Bindungen mit denen die Partikel kohäsiv miteinander verbunden
werden. Mehrere Partikel können so zu einem Korn (oder Cluster) verbunden
werden, welches bei entsprechender Einwirkung entlang der kohäsiven Bindungen
aufbrechen kann. Somit ist es möglich Festgesteine und auch Festkörperbrücken
zwischen granularen Medien zu simulieren.
Abbildung 7: Festkörper bestehend aus kugelförmigen Einzelpartikeln und
verschiedenen größeren Partikeln, die aus mehreren Kugeln aufgebaut sind (Cluster)
(Quelle: Lehrstuhl für Felsmechanik, TU BAF)
Modellränder werden durch Flächen oder durch Partikel selbst definiert. Flächen können aus Vierecken bestehen, aber auch komplexere Geometrien (bestehend aus dreieckigen Teilflächen) haben. Partikel können als Berandung verwendet werden, indem man sie fixiert (Beschränkung der Freiheitsgrade) oder
periodische Ränder definiert. Bei periodischen Rändern bilden Partikel, die die
Berandung berühren die Masterpartikel. Diese generieren auf der gegenüberliegenden Seite der Berandung ein Slavepartikel. Dadurch stützt sich das Modell
am Rand selbst.
Abbildung 8: DEM-Modell mit verschiedenen Modellrändern, ebene Flächen (links)
und periodische Ränder (rechts)
9
2.6
Beispiele
Die DEM ermöglicht es einen Festkörper hinsichtlich seines Deformations-,
Spannungs- und Festigkeitsverhalten inklusive Rissausbreitung zu untersuchen
(s. Abb. 9).
Abbildung 9: Eindringen eines Keils in einem Festkörper, bestehend aus
Voronoi-Partikeln, mit Rissbildung (Quelle: Lehrstuhl für Felsmechanik, TU BAF)
Durch bonds können Verkittungen zwischen Sandkörnern, wie sie beim Sandstein
vorhanden sind, simuliert werden. Folgendes Beispiel zeigt die Probe (links) und
die durch einen Scherbruch aufgelösten Bindungen (visualisiert durch graue Zylinder).
Abbildung 10: Sandsteinprobe, Aufbau (links) und kohäsive Bindungen nach
Scherbruch (rechts), (Quelle: Lehrstuhl für Felsmechanik, TU BAF)
10
Weitere Beispiele sind in folgender Tabelle aufgelistet.
Anwendung
Literaturhinweis
Nukleartest
te Kamp u. a. (1998)
Mikromechanik Ton
te Kamp und Konietzky (2002)
ineinander greifende Geogitter
Konietzky u. a. (2004)b
Ermüdung bei Metalen
Konietzky u. a. (2004)a
Schneid-/Bohrprozess
Lunow und Konietzky (2009)
Deckwerk/Uferböschung
Herbst u. a. (2010)
Zerkleinerungsprozess
Al-Khasawneh und Konietzky (2010)
Bruchprozess/Mikromechanik Beton Groh u. a. (2011)
Sand/granulare Materialien
Stahl und Konietzky (2011)
Bodenverflüssigung/HM Kopplung
Jakob u. a. (2012)
Tabelle 1: Liste von DEM-Anwendungen mit Literaturhinweisen
11
3
Smoothed Particles
Die Methode Smoothed Particle Hydrodynamics (SPH) wurde von Monaghan
(1988) zur Berechnung von astrophysikalischen Phänomenen eingeführt. Die Methode wurde weiterentwickelt und es ist möglich damit Flüssigkeiten jeglicher
Art zu simulieren. Dabei wird das zu untersuchende Kontinuum durch diskrete
Partikel approximiert. Jedes SPH-Partikel hat einen Kern, der durch eine Kernfunktion W (x, h) (engl. smoothing kernel, kernel function oder interpolating kernel) beschrieben wird. Dabei ist h der Wirkungsbereich des Partikels und x der
Abstand von Mittelpunkt. Die Kernfunktion kann im eindimensionalen Fall zum
Beispiel eine Gaußverteilung sein (s. Abb. 11).
W
2
W (x, h) =
x
1
√
e − h2
h π
x
Abbildung 11: Gaußkern
Den Partikeln werden die physikalischen Größen Dichte ρ, Position ~x und Geschwindigkeit ~v zugeordnet. Diese müssen in jedem Zeitschritt neu berechnet
werden.
3.1
Interpolation
Die Integralinterpolierende einer beliebigen Funktion A(~x) ist definiert durch
Z
A(~x) = A(~x0 )W (~x − ~x0 , h)d~x0 ,
(25)
wobei über den gesamten Raum integriert wird und die Kernfunktion W folgende
Eigenschaften besitzt (Monaghan (1992)).
Z
W (~x − ~x0 , h)d~x0 = 1
und
lim W (~x − ~x0 , h) = δ(~x − ~x0 )
(26)
h→0
Die Integralinterpolierende der Feldvariablen A eines SPH-Partikels an der Position ~x kann durch eine Summationsinterpolation seiner Nachbarpartikel (b) approximiert werden.
X mb
(27)
A(~x) =
Ab W (~x − ~xb , h)
ρb
b
Dabei sind mb , ρb , Ab und ~xb die Masse, die Dichte, der Wert der Feldvariable und
der Ortsvektor der Nachbarpartikel. Der Gradient von A wird durch
X mb
∇A(~x) =
Ab ∇W (~x − ~xb , h)
(28)
ρ
b
b
bestimmt. Daher ist zur Berechnung partieller Ableitungen mit der SPH-Methode
kein Gitter notwendig.
12
3.2
Physik SPH-Partikel
Die für die Massenerhaltung (Kontinuitätsgleichung)
∂ρ
+ ρ∇ · ~v = 0
∂t
(29)
∂~v 1
+ ∇p = 0
∂t ρ
(30)
und die Impulserhaltung
notwendigen Ableitungen ∇ · ~v und ∇p ergeben sich mit ~vba = ~vb − ~va und
Wab = W (~xa − ~xb ) durch Summationsinterpolation (s. Gl.(28)). Es gilt für alle
Partikel a
X mb
(∇ · ~v )a =
~vba ∇Wab
(31)
ρ
b
b
und
(∇~p)a =
X mb
ρb
b
p~b ∇Wab ,
(32)
wobei die Dichte durch
ρ(~x) =
X
mb ∇W (~x − ~xb , h)
(33)
b
gegeben ist. Somit ist die diskrete Form der Kontinuitätsgleichung gegeben durch
X mb
∂ρa
~vab ∇Wab
= ρa
∂t
ρb
b
(34)
und die diskrete Form der Impulserhaltung durch
∂~va
1 X mb
=−
p~b ∇Wab .
∂t
ρa b ρb
(35)
Die Geschwindigkeit ~v der Partikel ergibt sich aus der Ableitung
~va =
∂~xa
.
∂t
13
(36)
3.3
Beispiele
SPH kommt häufig bei Computeranimationen mit Wasser zum Einsatz, da man
mit SPH sehr realistisch wirkende Ergebnisse erzielen kann.
Abbildung 12: Wassersimulation mit SPH (Quelle: Bell u. a. (2005))
Ein weiteres Beispiel zeigt die sogenannte „Millenium Simulation“, die die Entstehung großskaliger Massenverteilungen (Galaxien und Galaxienhaufen) simuliert. Es wurden für die Rechnung mehr als 10 Milliarden Partikel verwendet (s.
http://www.mpa-garching.mpg.de/galform/millennium/).
Abbildung 13: „Millenium Simulation“ mit > 1010 Partikeln (Quelle: Springel u. a.
(2005))
14
4
Lattice Boltzmann
Die Lattice-Boltzmann Methode (LBM) basiert auf der Theorie von Ludwig
Boltzmann (1844-1906). Boltzmann betrachtete ein Gas als Medium, dass aus
miteinander wechselwirkenden Partikeln (Moleküle oder Atome) besteht, die mit
der klassischen Mechanik und einer statistischen Betrachtung beschrieben werden können. Diese Grundidee wurde in die LBM übernommen, wo Gase durch
Strömungsvorgänge und Kollisionen von Partikeln simuliert werden (Sukop und
Thorne (2006)). Der Ansatz ist auf die Simulation von Fluiden (Gase und Flüssigkeiten) erweitert worden.
~e6
~e5
~e2
node
~e3
~e1
lattice cell
~e7
~e8
~e4
lattice unit
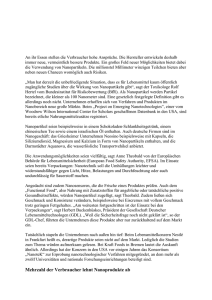
Abbildung 14: Gitteranordnung für ein D2Q9 Modell
Für die LBM wird ein Gitter bestehend aus Knotenpunkten (engl. nodes) benötigt. In Abbildung 14 ist die Gitteranordnung für ein D2Q9 Modell (2 Dimensionen, 9 Knotenpunkte) dargestellt. Die Vektoren ~ei bezeichnen die Partikelgeschwindigkeiten in Richtung i. Im einfachsten Ansatz haben die Partikel eine
einheitliche Masse (mu - mass unit) und das Gitter einen einheitlichen Gitterabstand (lu - lattice unit).
4.1
Boltzmann Gleichung
Ein System aus N Partikeln (Molekülen) kann durch eine Dichtefunktion F (~x, ~e, t)
beschrieben werden. Wenn die Positionen ~x und Geschwindigkeiten ~e aller Partikel (Moleküle) zum Zeitpunkt t bekannt sind, so ist es (zumindest hypothetisch)
möglich Vorhersagen zur Mechanik des Systems zu treffen. Angenommen eine
externe Kraft f wirkt auf die Partikel, dann haben die Partikel zum Zeitpunkt
t + dt die Positionen ~x + ~edt und die Geschwindigkeiten ~e + f dt. Wenn keine
Kollisionen stattfanden, dann gilt
F (~x, ~e, t)d~xd~e = F (~x + ~edt, ~e + f dt, t + dt)d~xd~e.
(37)
Wenn es zu Kollisionen kommt, wird in Gl. (37) ein Kollisionsterm Ω hinzugefügt, welcher die Änderungsrate zwischen End- und Anfangszustand des Systems
15
beschreibt (Mohamad (2007)).
F (~x, ~e, t)d~xd~e = F (~x + ~edt, ~e + f dt, t + dt)d~xd~e + Ω(F )d~xd~edt
(38)
Die zeitliche Ableitung von Gl. (38) ergibt
dF
= Ω(F ),
dt
(39)
d.h. die totale Änderungsrate der Dichtefunktion ist gleich der Kollisionsrate. Ist
F eine Funktion von ~x, ~e und t, dann gilt
dF =
∂F
∂F
∂F
d~x +
d~e +
dt
∂~x
∂~e
∂t
(40)
Wird Gl. (40) durch dt dividiert, erhält man
dF
∂F d~x ∂F d~e ∂F
=
+
+
.
dt
∂~x dt
∂~e dt
∂t
(41)
Mit der Geschwindigkeit ~e = d~x/dt, der Beschleunigung ~a = d~e/dt, des zweiten Newton’schen Gesetzes ~a = f /m (Masse m) und Gl. (39) ergibt sich die
Boltzmann’sche Bewegungsgleichung (Mohamad (2007)).
∂F
f ∂F
∂F
+
~e +
=Ω
∂t
∂~x
m ∂~e
4.2
(42)
Zeitrelaxation nach Bhatnagar, Gross und Krook
Die genaue Berechnung des Kollisionsterms Ω in Gl. (42) ist aufgrund seiner
Komplexität sehr schwierig. Deshalb wird Ω durch einen einfacheren Operator
approximiert, der aber keine signifikanten Fehler in die Lösung einbringt. Bhatnagar, Gross und Krook (BGK) stellten 1954 erstmals ein vereinfachtes Modell
für den Kollisionsoperator vor (Mohamad (2007)). Dabei werden die lokale Ausgleichsdichteverteilung (engl. equilibrium distribution function) F eq und ein Relaxationsfaktor τ eingeführt.
Ω=
1 eq
(F − F )
τ
(43)
Mit dieser Approximation (s. Gl.(38)) und Diskretisierung (Index i) erhält man
die linearisierte BGK-Relaxationsform der LB Gleichung (Cook und Noble (2004)).
dt
Fi (~x + ~ei dt, t + dt) = Fi (~x, t) − (Fi (~x, t) − Fieq (~x, t))
|
{z
} |τ
{z
}
Strömung
(44)
Kollision
Die Gleichung (44) besteht aus einen Strömungs- und einem Kollisionsteil. An
jedem Knotenpunkt gibt es acht Dichteverteilungen Fi und eine Restverteilung
F0 . Die Gleichgewichtsbedingungen sind, bezogen auf Sukop und Thorne (2006),
durch
~ei · ~vf
9 (~ei · ~vf )2 3 ~vf2
eq
Fi (~x) = ai ρ(~x) 1 + 3 2 +
− 2
(45)
c
2
c4
2c
16
gegeben. Die Wichtungen ai sind 4/9 für die Restpartikel mit i = 0, 1/9 für i ∈
{1,2,3,4} und 1/36 für i ∈ {5,6,7,8}. c ist die Grundgeschwindigkeit auf dem Gitter und die makroskopische
Dichte ρ ist definiert als Summe über alle gerichteten
P
Dichten (ρ = i Fi ). Die makroskopische Geschwindigkeit ~vf ist der Durchschnitt
der mikroskopischen Geschwindigkeiten ~ei , gewichtet mit den Dichten Fi .
8
~vf =
4.3
1X
Fi~ei
ρ i=0
(46)
Beispiele
Die LBM-Anwendung von Schenkengel und Vrettos (2011) simuliert eine induzierte Bodenverflüssigung. Das 2D-Modell besteht aus 300 × 60 Gitterpunkten
und stellt eine Böschung mit einem Böschungswinkel von 18◦ dar. Eine Explosion innerhalb der Böschung führt zum Böschungsversagen, wobei das Material
verflüssigt. Folgende Abbildung zeigt die Geschwindigkeiten im Material zu den
Zeitpunkten t = 0, 01s, t = 0, 29s und t = 1, 17s während der Verflüssigung.
Abbildung 15: 2D-LBM Modell einer Explosion innerhalb einer Böschung,
Geschwindigkeiten im LBM-Gitter sowohl als Vektoren, als auch farblich dargestellt
(Quelle: Schenkengel und Vrettos (2011))
Mit dem Modell von Schenkengel und Vrettos (2011) wurde erstmalig der rheologische Übergang von fest nach flüssig mit einem LBM-Ansatz gelöst und in einem
17
Modell umgesetzt.
Ein weiteres Beispiel zeigt eine Phasenseparation zweier Fluide mit unterschiedlicher Dichte.
Abbildung 16: Phasenseparation zweier Fluide (Quelle:
http://www.bgce.de/curriculum/projects/patilgmeiner/)
18
5
Molekulardynamik
Mit der Molekulardynamik (MD, auch Moleküldynamik genannt) können Wechselwirkungen zwischen Teilchen im atomaren Bereich (Atome, Moleküle, Nanopartikel, etc.) simuliert werden. Die Gesetze der klassischen Mechanik finden hier
keine Gültigkeit mehr. Zur Beschreibung der Mechanik der Partikel müssen die
Gesetze der Quantenmechanik herangezogen werden. Trotzdem sind sich DEM
und MD sehr ähnlich.
Die erste Anwendung der MD ist mit einem Artikel von Alder und Wainwright
auf das Jahr 1957 datiert. Somit ist die MD die älteste angewandte Partikelmethode. Im Gegensatz zur DEM, wo die Newtonschen Gleichungen als Grundlage
der Bewegungsbeschreibung der Partikel dient, basiert die MD auf der Schrödingergleichung. Diese ist sehr komplex und kann nur in den seltensten Fällen
analytisch gelöst werden. Selbst numerische Ansätze beschränken die Anwendung
der Schrödingergleichung auf sehr einfache Systeme und wenige Partikel. Daher
werden Näherungsverfahren verwendet, um das Lösen der Gleichung zu vereinfachen (Griebel u. a. (2004)).
5.1
Schrödingergleichung
In quantenmechanischen Systemen lassen sich Aussagen über den Zustand des
Systems aus der Zustandsfunktion Ψ (auch Wellenfunktion genannt) ableiten.
Ein System aus N Kernen und K Elektronen mit den Variablen Ri bzw. ri ist
durch seine Zustandsfunktion wie folgt charakterisiert (Griebel u. a. (2004)).
Ψ = Ψ(R1 , ..., RN , r1 , ..., rK , t)
(47)
Die Variable t kennzeichnet die Zeitabhängigkeit der Zustandsfunktion. Ψ ergibt
sich aus der Lösung der Schrödingergleichung (mit R = R1 , ..., RN und r =
r1 , ..., rK ).
∂Ψ(R, r, t)
= HΨ(R, r, t)
(48)
i~
∂t
Dabei ist i die imaginäre Einheit, H der Hamiltonoperator und ~ = h/2π mit h
dem Plank’schen Wirkungsquantum. Der Hamiltonoperator beschreibt die zeitliche Entwicklung der möglichen Energiemesswerte im System basierend auf dessen
Potentialen.
5.2
Potentiale
Wechselwirkungen zwischen zwei Partikeln, die nur vom Abstand der Partikel
abhängen, werden durch Paar-Potentiale beschrieben. Solche Potentiale sind z.B.
das Gravitationspotential, das Coulomb-Potential (elektrische Punktladung), das
van-der-Waals-Potential (schwache Anziehung bei Edelgasen) und das LennardJones-Potential (ungeladene, nicht gebundene Atome).
Das Lennard-Jones-Potential
n m σ
σ
U (rij ) = αε
−
,m < n
(49)
rij
rij
19
n
1
1
mit α = n−m
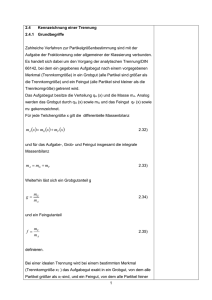
( mnm ) n−m wird durch σ und ε parametrisiert. ε definiert dabei die
Stärke der Abstoßungs- bzw. Anziehungskräfte. Dadurch können Materialien verschiedener Festigkeit simuliert werden. σ gibt den Nulldurchgang des Potentials
an. Abb. 17 zeigt ein Lennard-Jones-Potential für n = 12 und m = 6.
U (rij )
1.5
1
0.5
0
σ
−0.5
ε
−1
1
1.5
2
2.5
3
rij
Abbildung 17: Lennard-Jones-Potential mit ε = 1 und σ = 1
Bewegt sich ein Partikel in einem Potential, so ergibt sich die zugehörige potentielle Energie wie folgt.
Epot (R) =
N
N
X
X
Uij (rij )
(50)
i=1 j=1,j>i
Dabei ist rij = ||Rj − Ri || der Abstand beider Partikel. Als Potentialfunktion für
das Lennard-Jones-Potential mit n = 12 und m = 6 erhält man dann
" 6 #
N
N
12
X
X
σ
σ
−
.
(51)
Epot (R) = 4 · ε
rij
rij
i=1 j=1,j>i
Die zugehörige Kraft F~i , die auf das Partikel i wirkt, ergibt sich durch Gradientenbildung nach Ri .
F~i = −∇Ri Epot (R)
(52)
Für das Lennard-Jones-Potential ist die Kraft also durch die Gleichung
6
6 !
N
X
1
σ
σ
F~i = 24 · ε
·
· 1−2·
~rij
2
r
r
r
ij
ij
ij
j=1,j6=i
(53)
gegeben, wobei ~rij der Richtungsvektor zwischen den Partikeln i und j ist (Griebel
u. a. (2004)).
5.3
Physik MD-Partikel
Die Physik der MD-Partikel ist im Wesentlichen die Gleiche wie bei den DEMPartikeln (s. 2.3). Über das zweite Newtonsche Gesetz lassen sich Beschleunigungen, Geschwindigkeiten und Verschiebungen (nach Zeitintegration) ermitteln.
20
Damit erhält man die neuen Positionen der Partikel. Im Gegensatz zur DEM haben MD-Partikel einen Abschneideradius, der aus der Reichweite des Potentials
resultiert. Als Vereinfachung wirken keine Kräfte auf das Partikel, wenn sich keine
weiteren Partikel im Einflußbereich liegen.
5.4
Beispiele
In Abb. 18 ist eine Kollision zweier Körper dargestellt. Die Partikelgeschwindigkeiten sind farbcodiert (rot - hohe Geschwindigkeit, blau - niedrige Geschwindigkeit).
Abbildung 18: Kollision zweier Körper, zeitliche Entwicklung der Partikelverteilung
(Quelle: http://wissrech.ins.uni-bonn.de)
Lipidmoleküle im Wasser bilden typischerweise Doppelschichtmembranen, da ein
Ende hydrophil und das andere hydrophob ist (Bsp. Ölteppich). Diese Membranen bilden spontan Blasen oder Vesikel aus. Folgende Abbildung zeigt die
Simulation einer Fusion eines solchen Vesikels mit einer Lipidmembran.
Abbildung 19: Fusion eines Vesikels mit einer Membran aus 2018
Diblock-Copolymeren, Vesikeldurchmesser 40 nm (Quelle: http://www.mpg.de)
21
Literatur
Al-Khasawneh, Y. und Konietzky, Heinz (2010): „Interpretation and optimization
of vertical shaft crushers with DEEM“. In: Proceedings European Conference on
Fracture (ECF-18), Bundesanstalt für Materialprüfung und -forschung (BAM),
Berlin, S. 1–8.
Alder, B. und Wainwright, T. (1957): „Phase transition for a hard sphere system“.
In: Journal for Chemical Physics 27, S. 1208–1209.
Bell, Nathan, Yu, Yizhou und Mucha, Peter J. (2005): „Particle based simulation of granular materials“. In: Proceedings of the 2005 ACM SIGGRAPH/Eurographics Symposium on Computer animation.
Cook, Benjamin K. und Noble, David R. (2004): „A direct simulation method for
particle-fluid systems“. In: Engineering Computations 21, S. 151–168.
Griebel, Michael, Knapek, Stephan, Zumbusch, Gerhard und Calgar, Attila
(2004): Numerische Simulation in der Moleküldynamik. Springer. isbn: 3-54041856-3.
Groh, Ulrich, Konietzky, Heinz, Walter, Katrin und Herbst, Martin (2011): „Damage simulation of brittle heterogeneous materials at the grain size level“. In:
Theoretical and Applied Fracture Mechanics 55. 1, S. 31–38.
Herbst, Martin, Pohl, M. und Konietzky, Heinz (2010): „Numerische Simulation
der Interaktion Wasser - Deckwerk im Tidegebiet“. In: Wasserbauliche Mitteilungen 40, S. 85–94.
Itasca (2008): PFC3D Version 4.0 Theory and Background. Manual.
Jakob, Christian, Hüls, Wilfried und Konietzky, Heinz (2012): „Mikromechanische Modellierung verflüssigungsempfindlicher Sande“. In: Tagungsband Freiberger Forschungsforum - FK 4: Bodenverflüssigung bei Kippen des Lausitzer
Braunkohlebergbaus.
Konietzky, Heinz, Gröger, T. und te Kamp, Lothar (2004): „Simulation of timedependend damage and microfracturing via particle methods“. In: Proceedings
ICLODC 2004. SFB 398 Ruhr-University Bochum, S. 131–140.
Konietzky, Heinz, te Kamp, Lothar und Jenner, C. (2004): „Use of DEM to
model the interlocking effect of geogrids under static and cyclic loading“. In:
Numerical Modeling in Micromechanics via Particle Methods. A.A. Balkema
Publishers, S. 3–11.
Lunow, Christian und Konietzky, Heinz (2009): „Two dimensional simulation of
the pressing and the cutting rock destruction“. In: Proceedings 2nd Int. Conf.
on Computational Methods in Tunneling. Aedificatio Publishers, S. 223–230.
Mohamad, Abdulmejeed A. (2007): Applied Lattice Boltzmann Method. Dept. of
Mechanical und Manufacturing Engineering, Schulich School of Engineering,
The University of Calgary. isbn: 978-0-9783253-0-5.
Monaghan, J. J. (1988): „An introduction to SPH“. In: Computer Physics Communications 48, S. 89–96.
– (1992): „Smoothed Particle Hydrodynamics“. In: Annual Review of Astronomy
and Astrophysics 30, S. 543–574.
Schenkengel, Kay-Uwe und Vrettos, Christos (2011): „Modelling of liquefactioninduced lateral spreading using the Lattice Boltzmann Method“. In: 5th International Conference on Earthquake Geotechnical Engineering.
22
Springel, Volker, White, Simon D. M., Jenkins, Adrian, Frenk, Carlos S. u. a.
(2005): „Simulating the joint evolution of quasars, galaxies and thier largescale distribution“. In: Nature 435, S. 629–636.
Stahl, Michael und Konietzky, Heinz (2011): „Discrete element simulation of ballast and gravel under special consideration of grain-shape, grain size and relative density“. In: Granular Matter 13. 4, S. 417–428.
Sukop, Michael C. und Thorne, Daniel T. (2006): Lattice Boltzmann Modeling.
Springer. isbn: 3-540-27981-4.
te Kamp, Lothar und Konietzky, Heinz (2002): „Conceptual Micromechanical
simulation of stiff clay using particle methods“. In: Proceedings 5th European
Conference on Numerical Methods in Geotechnical Engineering. LCPC-Press,
S. 315–320.
te Kamp, Lothar, Konietzky, Heinz und Guerin, F. (1998): „Modeling of the Chagan underground nuclear test with the distinct element method“. In: FRAGBLAST 2, S. 295–312.
23