Realisierung aktiver Filter
Werbung

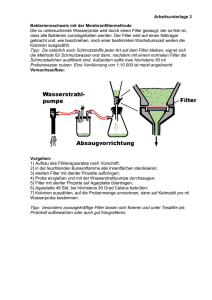
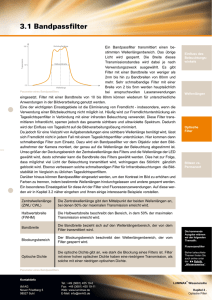
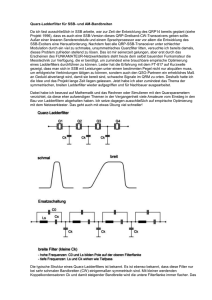
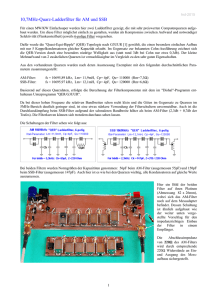
Vorlesung Analog- und Digitalelektronik WS 2001/2002 Realisierung aktiver Filter Motivation Prinzipiell lassen sich alle passiven Filter auch höherer Ordnung aus Widerständen, Kapazitäten und Induktivitäten aufbauen. In der Praxis gibt es doch einige Beschränkungen, deren Überwindung wünschenswert wäre. So sind beispielsweise vor allem in den unteren und mittleren Frequenzbereichen oft sehr große Induktivitäten notwendig, so daß in den meisten Fällen Eisenkerne eingesetzt werden müssen. Neben Größe und Gewicht und Preis stören dann auch die durch Hysterese hervorgerufenen nichtlinearen Verzerrungen. Hinzu kommt, daß Spulen, insbesondere solche mit hoher Induktivität, in integrierten Schaltkreisen nicht realisierbar sind. Die Übertragungsfunktion (passiver) Filter wird in der Regel für das unbelastete Filter berechnet. Wird das Filter nun belastet, ändert sich dadurch auch das Frequenzverhalten. Selbst wenn die Last bei der Berechnung des Filters berücksichtigt wurde, so hat man die gewünschte Übertragungsfunktion eben nur bei einer bestimmten Last realisiert. Dieses Problem macht sich auch bemerkbar, wenn man Filter höherer Ordnung realisieren möchte. Diese lassen sich durch Kaskadieren mehrerer Filter niederer (meist erster oder zweiter) Ordnung aufbauen. Schaltet man die Filterstufen jedoch einfach hintereinander, so stellt die nachfolgende Stufe eine Last für die vorhergehende Stufe dar, die daraufhin ihre Übertragungsfunktion ändert. Zwar existieren Techniken und Hilfsmittel zur Berechnung passiver Filter höherer Ordnung; diese sind jedoch recht aufwendig. Häufig sollen Signale nicht nur gefiltert, sondern auch verstärkt werden. Passive Filter können offensichtlich nur "Verstärkungen" von Eins bieten. Fassen wir die oben genannten Limitierungen passiver Filter zusammen, so ergibt sich die folgende Wunschliste für ein aktives Filter: • Verstärkung > 1 möglich • Verzicht auf Induktivitäten • Übertragungsfunktion ist unabhängig von der Last • Filter einfach kaskadierbar Mit aktiven Filtern lassen sich alle diese Eigenschaften erfüllen. Zusätzlich eröffnet sich bei aktiven Filtern die Möglichkeit, Parameter wie Grenzfrequenz, Mittenfrequenz und Bandbreite elektronisch steuerbar zu machen. Trotzdem gibt es auch hier Beschränkungen, die nicht unerwähnt bleiben sollen. So ist zur Realisierung aktiver Filter natürlich mindestens ein aktives Element notwendig, was höhere Kosten verursacht (Bauelementekosten, Betriebsspannung muß vorhanden sein etc.) Dank niedriger Halbleiterpreise kann dieser Aspekt aber gegenüber den Vorteilen aktiver Filter oft vernachlässigt werden. Eine viel wichtigere Einschränkung ergibt sich aus den Eigenschaften realer Operationsverstärker. Wie wir später noch sehen werden, besitzen diese ein Tiefpaßverhalten, so daß bei sehr hohen Frequenzen wieder auf rein passive Filter zurückgegriffen werden muß. Glücklicherweise sind hier aber kleinere Werte für Induktivitäten und Kapazitäten ausreichend, die einfacher hergestellt werden können. Desweiteren kann es bei aktiven Schaltungen zu Instabilitäten kommen, was gegebenenfalls schaltungstechnisch kompensiert werden muß. TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.1 Vorlesung Analog- und Digitalelektronik WS 2001/2002 Die Dimensionierung der Bauelemente erfolgt bei aktiven und passiven Filtern nach dem gleichen Schema: 1. Vorgabe der Filterkoeffizienten 2. Wahl einer geeigneten Schaltung 3. Berechnung (bzw. Nachschlagen) der Übertragungsfunktion 4. Koeffizientenvergleich Realisierung aktiver Filter 1. Ordnung Filter erster Ordnung lassen sich mit Widerständen und Kondensatoren realisieren. Schaltet man solchen RC-Gliedern noch eine Verstärkerstufe nach, sind alle unsere Anforderungen an ein aktives Filter erfüllt. Im Folgenden sind einige Beispiele solcher einfachen Schaltungen für Tief- und Hochpaßfilter aufgeführt. Ist eine Signalverstärkung nicht notwendig, läßt sich statt des nichtinvertierenden Verstärkers auch der einfachere Impedanzwandler einsetzen. H (s) = K ⋅ 1 1 + sRC mit K = 1 + R2 R1 Abbildung 1: einfaches aktives Tiefpaßfilter erster Ordnung H ( s) = K ⋅ sRC 1 + sRC mit K = 1 + R2 R1 Abbildung 2: einfaches aktives Hochpaßfilter erster Ordnung Ein Vorteil der oben gezeigten Schaltungen ist, daß sich Grenzfrequenz und Verstärkungsfaktor unabhängig voneinander einstellen lassen. Noch einfachere Schaltungen mit kleinerer Bauelementeanzahl bekommt man, indem man das Filter in die Rückkopplung des invertierenden Verstärkers einbezieht. TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.2 Vorlesung Analog- und Digitalelektronik WS 2001/2002 1 R2 Ua sC H ( s )= − =− Ue R1 H (s) = K ⋅ mit K = − Abbildung 3: invertierendes aktives Tiefpaßfilter erster Ordnung H ( s )= − R2 R1 Ua R2 =− 1 Ue R1 + sC H ( s) = K ⋅ Abbildung 4: invertierendes aktives Hochpaßfilter erster Ordnung 1 1 + sRC mit K = − sR1C 1 + sR1C R2 R1 Ein bisher noch nicht besprochenes Filter ist das Allpaßfilter. Der Betrag der Übertragungsfunktion ist hier über den gesamten Frequenzbereich gleich Eins, d.h. es findet keine Verstärkung oder Dämpfung des Signals statt. Die Phase wird jedoch im bis zu -180° gedreht, wobei bei der Grenzfrequenz ω0 eine Phasenverschiebung von -90° vorliegt. Ein solches Filter wird auch Phasenschieber genannt. Es wird beispielsweise zur Kompensation des Phasengangs vorheriger Stufen oder zur Signalverzögerung eingesetzt. 1 − sRC 1 + sRC H (s) = 1 H ( s) = Abbildung 5: Allpaßfilter erster Ordnung ϕ ( s) = arg(1 − sRC ) − arg(1 + sRC ) = arctan(−ωRC ) − arctan(ωRC ) = −2 ⋅ arctan(ωRC ) TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.3 Vorlesung Analog- und Digitalelektronik WS 2001/2002 0 -20 -40 Phase [Grad] -60 -80 -100 -120 -140 -160 -180 -3 -2 -1 0 log ω/ω 1 2 3 g Abbildung 6: Phasengang des Allpaßfilters Realisierung aktiver Filter zweiter Ordnung Läßt sich der Ansatz zum Entwurf aktiver Filterschaltungen erster Ordnung, also das Verwenden eines bekannten passiven Filters gefolgt von einem Verstärker, auch zur Realisierung von Filtern zweiter Ordnung verwenden ? Da gemäß unserer Wunschliste Induktivitäten nicht verwendet werden dürfen, bliebe zur Realisierung eines Tiefpasses 2. Ordnung nur das Hintereinanderschalten zweier RC-Tiefpässe erster Ordnung. H (s) = 1 s τ 1τ 2 + s[τ 1 + τ 2 + τ 3 ] + 1 2 τ 1 = R1C1 ,τ 2 = R2 C 2 ,τ 3 = R1C 2 Abbildung 7: passiver Tiefpass zweiter Ordnung aus RCGliedern Wie die Übertragungsfunktion zeigt, liegt hier tatsächlich ein Tiefpaßfilter zweiter Ordnung vor. Berechnet man allerdings die Polstellen dieser Übertragungsfunktion, so stellt man fest, daß diese auf der reellen Achse liegen. Filter mit optimalen Eigenschaften (z.B. Butterworth) haben aber komplexe Polstellen und lassen sich dementsprechend nicht mit einem solchen passiven Tiefpaß aus RC-Gliedern realisieren. In Abbildung 8 und Abbildung 9 wird solch ein Tiefpaß mit einem Tiefpaß mit Butterworth-Charakteristik verglichen. Dabei wurden die Tiefpässe derart dimensioniert, daß sie gleiches asymptotisches Verhalten zeigen bzw. die gleiche -3dB Grenzfrequenz aufweisen. TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.4 Vorlesung Analog- und Digitalelektronik WS 2001/2002 0 0 Butterworth RC-TP 2. Ordnung -5 -10 -10 -15 RC-TP 2. Ordnung 20*log(|H(s)|) [dB] 20*log(|H(s)|) [dB] -20 -30 -40 Butterworth -20 -25 -30 -50 -35 -60 -70 -1.5 -40 -1 -0.5 0 log ω/ωg 0.5 1 -45 -1 1.5 Abbildung 8: Vergleich zwischen einem ButterworthTiefpaß 2. Ordnung und einem Tiefpaß 2. Ordnung aus RC-Gliedern mit gleichem asymptotischen Verhalten -0.8 -0.6 -0.4 -0.2 0 0.2 log ω/ωg 0.4 0.6 0.8 1 Abbildung 9: Vergleich zwischen einem ButterworthTiefpaß 2. Ordnung und einem Tiefpaß 2. Ordnung aus RC-Gliedern mit gleicher -3dB-Frequenz Filter mit Einfachmitkopplung: Sallen-Key-Filter Um die Betragsfrequenzgänge der Filter in Abbildung 8 anzugleichen, müßte die Übertragungsfunktion des RC-Filters im Bereich der Grenzfrequenz verstärkt werden. Diese Verstärkung kann durch eine positive Rückkopplung des Ausgangssignals auf das Eingangssignal (Mitkopplung) erreicht werden. Die Mitkopplung erfolgt über den Kondensator C1, der jetzt anstelle mit Masse mit dem Ausgang des nachgeschalteten Verstärkers verbunden ist (s. Abbildung 10). Abbildung 10: Prinzip des Sallen-Key Tiefpaßfilters Versuchen wir, uns das Verhalten der Filterschaltung zu erklären. Für kleine Frequenzen ω→0 stellen die Kondensatoren einen unendlich großen Widerstand dar; der Rückkopplungszweig ist quasi unterbrochen und am Ausgang liegt die im den Faktor K verstärkte Eingangsspannung an. Für sehr große Frequenzen ω→ ∞ stellen die Kondensatoren einen Kurzschluß dar. Am Eingang des Verstärkers liegen dann 0V und die Ausgangsspannung ist dementsprechend gering. Im Gegensatz zu der später vorgestellten Filterstruktur mit Mehrfachgegenkopplung wird der Verstärkungsfaktor des nachgeschalteten Verstärkers auf den festen Wert K eingestellt. Diese Filterstruktur wird deshalb auch als KRC Filter bezeichnet. TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.5 Vorlesung Analog- und Digitalelektronik WS 2001/2002 Abbildung 11: Sallen-Key (oder KRC) Tiefpaßfilter Berechnet man die Übertragungsfunktion der oben gezeigten Schaltung, erhält man: H TP ( s ) = K 1 + s[R2C2 + R1C2 + R1C1 (1 − K )] + s 2 R1C1 R2C2 Varianten der Dimensionierung von Sallen-Key-Filtern Da die Anzahl der festzulegenden Bauelemente größer als die Anzahl der Filterkoeffizienten ist, können einige Werte frei gewählt werden. Die Dimensionierung lässt sich vereinfachen, wenn von vornherein bestimmte Spezialisierungen vorgenommen werden. Zwei gebräuchliche Arten der Dimensionierung von Sallen-Key Filtern sollen im Folgenden kurz vorgestellt werden. 1. Wahl gleicher Komponenten Wählt man R1 = R2 = R und C1 = C2 = C vereinfacht sich die Übertragungsfunktion zu H TP ( s ) = K K = 2 2 2 2 1 + sRC (3 − K ) + s R C 1 + SRCω 0 (3 − K ) + S 2ω 0 R 2C 2 Ein Koeffizientenvergleich mit der Übertragungsfunktion des Einheitstiefpasses ! K X = 2 2 2 2 2 1 + SRCω 0 (3 − K ) + S ω 0 R C 1 + a1S + a2 S ergibt: a2 = (RC ) ω 0 2 2 a1 = RCω 0 (3 − K ) = Þ a2 ω (3 − K ) Þ ω0 0 RC = a2 ω0 K = 3− a1 a2 Ein großer Vorteil dieser Art der Dimensionierung ist, daß die Filterart (Butterworth, Tschebyscheff etc.) nicht von der Grenzfrequenz abhängt sondern allein durch die Verstärkung K bestimmt wird. . Vor allem bei hohen Filtergüten (Tschebyscheff) ist diese Einstellung alledings recht empfindlich gegenüber Bauelementetoleranzen. Die TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.6 Vorlesung Analog- und Digitalelektronik WS 2001/2002 Grenzfrequenz des Filters läßt sich (unabhängig vom Filtertyp) durch Variieren von RC einstellen. 2. Innere Verstärkung = 1 Eine weitere Möglichkeit der Dimensionierung ergibt sich, wenn der Verstärkungsfaktor auf Eins gesetzt wird. Damit können die Widerstände im Gegenkopplungszweig des OPV entfallen. Die Übertragungsfunktion ergibt sich jetzt zu H TP ( s ) = 1 2 1 + Sω 0 [R2C2 + R1C2 ] + S 2ω o R1C1 R2C2 Der Koeffizientenvergleich ! 1 X = 2 2 2 1 + Sω 0 [R2C2 + R1C2 ] + S ω o R1C1 R2C2 1 + a1S + a2 S ergibt 2 2 R1 = a1C1 ± a1 C1 − 4a2C1C2 2C1C2ω 0 R2 = a2 ω 0 R1C1C2 C1 a ≥ 4 22 erfüllt sein. Die C2 a1 günstigste Dimensionierung ergibt sich, wenn diese Bedingung gerade erfüllt wird. In der Praxis wird man also zwei verfügbare Kapazitäten wählen, die die obige Bedingung gerade erfüllen und dann die Widerstände nach obigen Formeln bestimmen. damit sich reelle Widerstandswerte ergeben, muß die Bedingung Diese Art der Dimensionierung bietet nicht die Flexibilität und gute Abstimmbarkeit wie die Dimensionierung mit gleichen Komponenten, da hier eine Änderung eines Bauelements eine Veränderung sowohl von Grenzfrequenz als auch Filtercharakteristik bewirkt. Andererseits bietet die Dimensionierung mit Verstärkung = 1 eine größere Robustheit gegenüber Bauelementetoleranzen. Da als aktives Element ein einfacher Impedanzwandler (als OP-Schaltung oder auch einfacher Emitterfolger) eingesetzt werden kann, sind hier auch Filter in höheren Frequenzbereichen möglich. Selbstverständlich sind mit der Sallen-Key-Struktur auch andere Filter als nur Tiefpässe realisierbar. Vertauscht man beispielsweise Widerstände und Kondensatoren erhält man einen Hochpaß; auch Bandpässe und -sperren können mit Einfachmitkopplung realisiert werden. TU Berlin - Fachgebiet Elektronik und medizinische Signalverarbeitung S.7