Messtechnik — Grundsätze und Verfahren
Werbung

Messtechnik
—
Grundsätze und Verfahren
Prof., Dipl. El. Ing. ETH Martin Schlup
15. Mai 2015
Das vorliegende Skript ist als Lernunterlage für einen Messtechnikkurs im ersten Semester des Fachhochschulstudiums für technische Studiengänge gedacht, wie
Elektro-, Systemtechnik oder Maschinenbau und allgemein als Ergänzung für alle Kurse in denen praktische Arbeiten mit Messungen und Datenerfassung vorkommen. Der Kurs beschränkt sich im Wesentlichen auf zwei Schwerpunkte: die
(vereinfachte) Erläuterung des Leitfadens nach GUM zur Bestimmung von Messunsicherheiten und eine exemplarische Beschreibung einfacher Messtechniken zur Bestimmung der Temperatur oder mechanischer Spannungen mittels Widerstandsmessung. Der Kurs beschränkt sich, auf Grund der limitierten Kenntnisse der Studenten
in dieser Ausbildungsstufe, auf eine teilweise „rezeptartige“ und exemplarische Behandlung des Stoffs und versucht die theoretischen Aspekte auf ein Minimum zu
beschränken. Einige ergänzende Angaben zur benötigten Physik, Messschaltungen,
Mathematik (Wahrscheinlichkeitsrechnung, Statistik, Analysis) sowie redaktionelle
Hinweise zur Angabe von Messergebnissen sind im Anhang untergebracht.
Ich möchte mich hier ganz besonders bei meinem Kollegen Prof. Dr. Franz Baumgartner für seine Initiative bedanken, das Fach Messtechnik am Departement Technik der Zürcher Fachhochschule der angewandten Wissenschaften in das Unterrichtscurriculum eingeführt zu haben. Auch für seine fachlichen und praktischen Beiträge
an den ursprünglichen Unterrichtsunterlagen sei ihm herzlichst gedankt.
1
Inhaltsverzeichnis
Inhaltsverzeichnis
1. Einleitung
1.1. Allgemeine Zusammenhänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Prinzipien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
4
6
2. Bestimmung der Messunsicherheiten
2.1. Systematische Messabweichungen . . . . . . . . . . . .
2.2. Zufällige Messunsicherheiten . . . . . . . . . . . . . . .
2.2.1. Unsicherheit Typ A . . . . . . . . . . . . . . .
2.2.2. Unsicherheit Typ B . . . . . . . . . . . . . . . .
2.2.3. Kombinierte Unsicherheit Typ C und erweiterte
2.2.4. Fehlerfortpflanzung . . . . . . . . . . . . . . . .
2.2.5. Zusammenfassung des Verfahrens nach GUM .
2.2.6. Praktische Regeln . . . . . . . . . . . . . . . .
7
. . . . . . . . . . . . . .
8
. . . . . . . . . . . . . .
8
. . . . . . . . . . . . . .
9
. . . . . . . . . . . . . . 10
Messunsicherheitsangabe 14
. . . . . . . . . . . . . . 15
. . . . . . . . . . . . . . 17
. . . . . . . . . . . . . . 18
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
3.1. Resistive Temperaturmessung . . . . . . . . . . . . . .
3.1.1. PT100 . . . . . . . . . . . . . . . . . . . . . . .
3.1.2. NTC . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Messung mechanischer Spannungen mittels DMS . . .
3.2.1. Funktionsprinzip . . . . . . . . . . . . . . . . .
3.2.2. Eigenschaften . . . . . . . . . . . . . . . . . . .
3.2.3. Messschaltungen . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
19
19
21
22
22
23
24
A. SI-Einheiten
25
B. Wahrscheinlichkeitsrechung
B.1. Normalverteilung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2. Gleichverteilung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3. Bestimmung der Streuung des Mittelwerts . . . . . . . . . . . . . . . . . . . . .
27
27
30
31
C. Empfindlichkeiten
32
D. Angabe der Messergebnisse
D.1. Allgemeine Regeln zur Darstellung von Zahlenwerten . . . . . . . . . . . . . . .
D.2. Angabe von Einheiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D.3. Angabe von Messwerten mit ihren Messunsicherheiten . . . . . . . . . . . . . .
34
34
35
35
E. Messschaltungen
E.1. Brückenschaltung . . . . . . . . . . . . . . . . .
E.2. Vermeidung von systematischen Fehlern . . . .
E.2.1. Dreileiter-Schaltung . . . . . . . . . . .
E.2.2. Vierleiter-Schaltung (Kelvin-Klemmen) .
36
36
38
38
38
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
F. DMM-Datenblatt
40
G. Musterkalibrierschein
43
2
Inhaltsverzeichnis
H. Datenblatt Platin-Temperatursensor Heraeus M422
47
I. Datenblatt NTC-Temperatursensor EPCOS B57164 K0331
49
3
1. Einleitung
1. Einleitung
Messen hat aus nachvollziebaren Gründen in jeder Zivilisation für den Handel und die Ingenieurkünste schon immer eine zentrale Rolle gespielt. Aber erst mit der grundlegenden wissenschaftlichen Revolution durch Galileo Galilei (1564 - 1642) hat Messen definitiv Einzug in
die Physik und die naturwissenschaftliche Forschung allgemein gefunden. Messtechnik und die
damit beschäftigten Institutionen und Industrien sind Heute nicht mehr wegzudenken und liefern einen meistens nicht bewussten aber wesentlichen Anteil zur Weltwirtschaft, direkt durch
das betroffene Handelsvolumen aber auch indem sie letzteres überhaupt ermöglichen. Darunter
fallen Normierungs- und Akkreditierungsstellen, ohne die es keine Marktöffnung, Sicherheitsbestimmungen, Austauschbarkeit, Qualitätssicherung und Zertifizierung geben könnte.
1.1. Allgemeine Zusammenhänge
Beim Messen in den Naturwissenschaften und in der Technik geht es primär darum, physikalische Eigenschaften wie z. B. Temperatur, Längen, Translations- und Drehgeschwindigkeiten,
Volumen, Masse, Stromstärke, elektrische und mechanische Spannungen, Energie und Leistung eindeutig und reproduzierbar zu erfassen. Dazu ist die Definition von Masseinheiten
und Messverfahren notwendig (cf. Anhang A), mit denen jederzeit und an beliebigen Orten
Messungen mit geeigneter Präzision und universeller Gültigkeit durchgeführt werden können.
Da Messungen eigentlich auf Vergleiche basieren, braucht es normierte Referenzgrössen oder
-verfahren mit denen quantitative Mengenangaben gemacht werden können. Mit dem wissenschaftlichen und technischen Fortschritt und der Verfeinerung der Verfahren, wurden die Definitionen der Masseinheiten immer weiter in Richtung höherer Genauigkeit und Reproduzierbarkeit entwickelt. Das Ende dieses Prozesses ist nicht abzusehen, da er selber wieder zu weiteren
Erkenntnissen beiträgt (cf. Abbildung 1).
Eine unvermeidliche Eigenschaft jeder Messung ist die Unsicherheit mit welcher ein Ergebnis
ermittelt werden kann. Diese Unsicherheit hängt einerseits von der Definitionsgüte der Masseinheiten und andererseits von der Qualität der verwendeten Messgeräte und -verfahren ab,
wobei letztere im Allgemeinen den dominierenden Faktor bilden. Im Handel müssen neben den
rein technischen Aspekten des Messens, noch gesetzliche Anforderungen berücksichtigt werden.
Daher werden zwei verschiedene Begriffe im Zusammenhang mit Messen gebraucht:
Kalibrieren
Tätigkeit zur Ermittlung des Zusammenhangs zwischen dem ausgegebenen Wert eines
Messgeräts, einer Messeinrichtung oder dem von einer Massverkörperung oder einem Referenzmaterial dargestellten Wert und dem zugehörigen, durch ein Normal festgelegten
Wert einer Messgrösse unter vorgegebenen Bedingungen. Etwas einfacher ausgedrückt:
Beim Kalibrieren werden die von Messgeräten angezeigten Werte mit Sekundär- oder
Referenznormalen verglichen. Beim Kalibriervorgang werden im Allgemeinen Messinstrumente justiert, d. h. so eingestellt, dass sie innerhalb ihrer Genauigkeitsklasse mit der
Referenzgrösse übereinstimmen. Kalibrieren ist nicht gesetzlich geregelt und beruht auf
Freiwilligkeit.
Eichen
Folge von Operationen einer dazu ermächtigten Behörde oder Organisation zur Überprüfung und Bestätigung, dass ein Messmittel den gesetzlichen Vorschriften genügt (z. B. für:
Metzgerwaage, Tanksäulenzähler, Elektrizitätszähler).
4
1. Einleitung
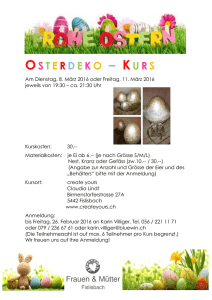
Abbildung 1: Historische Entwicklung der Definitionsgüte der Masseinheiten
(©METAS, Tagung 17.Nov.04/Jk)
In der Schweiz werden die volkswirtschaftlich relevanten Aufgaben im Zusammenhang mit
Kalibrier- und Eichwesen durch zwei staatliche Stellen wahrgenommen:
METAS – das nationale Metrologieinstitut
Das Bundesamt für Metrologie (METAS) realisiert und vermittelt international abgestimmte und anerkannte Masseinheiten in der erforderlichen Genauigkeit. Es beaufsichtigt
die Verwendung von Messmitteln in den Bereichen Handel, Verkehr, öffentliche Sicherheit,
Gesundheit und Umwelt. METAS überwacht den Vollzug der gesetzlichen Bestimmungen
durch die Kantone und die ermächtigten Eichstellen (cf. http://www.metas.ch/metasweb).
Schweizerische Akkreditierungsstelle – SAS
Die Schweizerische Akkreditierungsstelle SAS begutachtet und akkreditiert Konformitätsbewertungsstellen (Laboratorien, Inspektions- und Zertifizierungsstellen) aufgrund internationaler Normen. Die Schweizerische Akkreditierungsstelle SAS ist Teil des Staatssekretariats für Wirtschaft (SECO) (cf. http://www.seco.admin.ch/sas/00040/index.html?lang=
de).
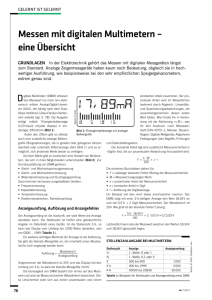
Aus Abbildung 2 ist ersichtlich wie in der Schweiz das Kalibrier- und Eichwesen hierarchisch
aufgebaut ist.
Im Anhang G ist ein Beispiel eines kommentierten Musterkalibrierscheins nach DIN EN
ISO/IEC 17025:2005 für ein Digital Voltmeter von Flucke enthalten, wie akkreditierte Firmen
und Labore diese für die Geräte ihrer Kunden erstellen. Diese Dienste sind natürlich nicht um-
5
1. Einleitung
Abbildung 2: Organisation des Messwesens in der Schweiz (©METAS, Tagung 17.Nov.04/Jk)
sonst: eine Vorstellung davon liefert die Preisliste der METAS für den Fachbereich Gleichstrom
und Niederfrequenz, zu finden unter
http://www.metas.ch/metas/de/home/fabe/elektrizitaet-gleichstrom-und-niederfrequenz.html,
http://www.metas.ch/dam/data/metas/Fachbereiche/GleichstromNiederfrequenz/katalogdclfD.pdf
oder von Conrad http://www.conrad.de/ce/de/content/cms_service_calibration/Kalibrierservice.
Mit der Menge der sich in der Industrie und den diversen Betrieben im Umlauf befindenden Messinstrumenten ist es nicht verwunderlich, dass der Aufwand für das Messwesen in der
Schweiz vergleichbar mit dem für Bauten ist und rund 6% des Bruttoinlandprodukts1 beträgt
(1997): SFR 22.5 Mrd.
1.2. Prinzipien
Wie schon erwähnt, sind Messungen immer mit Unsicherheiten behaftet. Ein Messergebnis
ist nur dann aussagekräftig, wenn dabei auch die Schranken seiner Messunsicherheit und das
Vertrauen in diese Schranken angegeben werden.
Eine Messung ohne Abklärung der Messunsicherheit und ein Ergebnis ohne Unsicherheitsangabe ist wertlos.
Beim Messen ist also eine sorgfältige Vorgehensweise zur Bestimmung und gegebenenfalls
Minimierung dieser Unsicherheitsschranken notwendig. Galileo Galilei hat schon im 16. Jahrhundert die folgenden Prinzipien für die Messung physikalischer Grössen angewendet, welche
heute immer noch gültig sind:
1
Angabe nach METAS, Tagung 17. Nov. 2004/Jk
6
2. Bestimmung der Messunsicherheiten
• Methodisches Vorgehen
– Messung durch Vergleich mit Referenz (z. B. Zeitmessung „von Hand“ mit zertifiziertem Chronometer)
– Wiederholungen (Ist die Messung reproduzierbar?)
– verschiedene Verfahren oder Messgeräte (bei Galilei z. B. Zeitmessung mit Puls oder
Klepsydra2 )
– Störungen identifizieren und minimieren (z. B. Reibungseffekte durch Oberflächenbehandlung reduzieren)
• Auswerten
– Ergebnis vorhersagen (bedingt Modellvorstellungen, Berechnungen)
– Erwartungen überprüfen (Stimmt die Messung mit den Vorhersagen überein?)
– Unsicherheiten abschätzen (Wie schwanken die Messwerte bei der Wiederholung der
Messung? Welche zufälligen Grössen beeinflussen die Messergebnisse?)
– Schlussfolgerungen (Stimmt das Modell, gibt es neue Erkenntnisse?)
Zur heutigen Messtechnik gehören Kenntnisse in Sensortechnik und Datenverarbeitung, d. h.
Physik, Elektronik, statistische Methoden und EDV. So gesehen ist Messtechnik ein überaus
fachübergreifendes Gebiet. Die meisten Messverfahren übersetzen die gesuchte, kontinuierliche
(analoge) physikalische Grösse, z. B. eine Temperatur, in eine elektrische Spannung. Deren
Verlauf wird in einem AD-Wandler3 abgetastet und quantisiert (diskretisiert), um in einem
Rechner oder Mikrocontroller weiterverarbeitet zu werden.
2. Bestimmung der Messunsicherheiten
Eine durch das Bureau International des Poids et Mesures einberufene Arbeitsgruppe hat einen
Leitfaden zur Angabe der Unsicherheit beim Messen mit dem Akronym GUM erstellt4 (cf. z. B.:
http://de.wikipedia.org/wiki/GUM_%28Norm%29). Ziel des Leitfadens ist eine international einheitliche Vorgehensweise beim Ermitteln und Angeben von Messunsicherheiten.
Das Internationale Wörterbuch der Metrologie definiert Messunsicherheit als einen Kennwert, der den Bereich der Werte charakterisiert, die der Messgrösse durch die durchgeführte
Messung vernünftigerweise zugeschrieben werden können. Die nach einem einheitlichen Verfahren berechnete und in einer bestimmten Weise mitgeteilte Messunsicherheit drückt so die Stärke
des Vertrauens aus, mit der angenommen werden darf, dass der Wert der gemessenen Größe
unter den Bedingungen der Messung innerhalb eines bestimmten Werteintervalls liegt.
Bei den Ursachen der Messunsicherheit muss zwischen den systematischen und den zufälligen
Quellen unterschieden werden, wobei letztere wiederum in zwei Kategorien unterteilt werden
(statistische und nicht-statistische Analyse), welche kombiniert werden können.
2
3
4
Wasseruhr
AD steht für analog-digital
Joint Committee for Guides in Metrology: Evaluation of Measurement Data – Guide to the Expression of
Uncertainty in Measurement, 2008
7
2. Bestimmung der Messunsicherheiten
2.1. Systematische Messabweichungen
Unter diesen Begriff fallen sämtliche Messfehler, welche, entsprechende Kenntnisse über die
Messgeräte und -verfahren vorausgesetzt, korrigiert werden können. Diese Fehler haben systematische, d. h. reproduzierbare und nicht dem Zufall unterworfene Ursachen und sind daher
vorzeichenbehaftet. Falls bekannt, sollten diese Fehler immer korrigiert werden, es sei denn, sie
sind neben den zufälligen Fehleranteilen vernachlässigbar. Durch geeignete Wahl der Messverfahren und -apparaturen können die systematischen Fehler in einigen Fällen so klein gehalten
werden, dass sie vernachlässigbar sind.
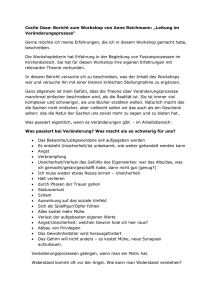
Beispiel: Stromstärkebestimmung durch Messung der Spannung an einem bekannten Widerstand
Wird die Spannung an einem stromführenden Widerstand mit einem Multimeter gemessen (cf.
Abbildung 3), so kann der zusätzlich durch das Messgerät fliessende Messstrom den gesuchten Wert verfälschen. Falls der Innenwiderstand des Messgeräts bekannt ist, so ist es möglich
diesen Einfluss rechnerisch zu ermitteln und zu kompensieren. Ob dieser Fehler eine entscheidende Rolle spielt oder nicht, hängt hier von Verhältnis zwischen den Widerstandswerten des
Messobjekts und des Messgeräts ab.
Abbildung 3: Indirekte Messung der Stromstärke an einem bekannten Widersand
Gesucht wird die Stromstärke I, gemessen wird aber die Strömstärke IM = U
R.
IM stimmt nur dann mit I überein, wenn der Strom IV durch das Spannungsmessgerät vernachläsigbar klein gegenüber I bzw. IM ist.
2.2. Zufällige Messunsicherheiten
Die zufälligen Messunsicherheiten können entsprechend ihrem Ursprung und den bekannten
Ursachen auf zwei Arten ermittelt werden. GUM unterscheidet zwischen den beiden folgenden
Arten:
Typ A : Berechnung der Messunsicherheit durch statistische Analyse der Messungen
Typ B : Berechnung der Messunsicherheit mit anderen Mitteln als der statistischen Analyse
Die beiden Typen können auch gemeinsam auftreten und müssen dann kombiniert werden.
8
2. Bestimmung der Messunsicherheiten
2.2.1. Unsicherheit Typ A
Wiederholtes Messen einer physikalischen Grösse5 liefert im Allgemeinen Messwerte die untereinander merklich schwanken können. In diesem Fall wäre ein einzelner Messwert keine gute
Schätzung für den unbekannten Wert der gesuchten Grösse. Solche Wertschwankungen haben vielseitige Ursachen, die meistens nicht auseinandergehalten werden können, zudem sie
dem auszumessenden Objekt wie auch den benutzten Messgeräten eigen sind. Als Beispiele für
solche Ursachen können Temperaturschwankungen, thermisches Rauschen, Ableseparallaxen,
Reibungseffekte, Speisespannungsschwankungen, Störsignale von anderen Prozessen genannt
werden.
Die gesuchte physikalische Grösse ist also ein (zeitkontinuierlicher) Zufallsprozess. Durch
die Vielfalt und Unabhängigkeit der Ursachen gehorchen seine Schwankungen einer Normalverteilung (cf. Anhang B.1). Die entsprechende Wahrscheinlichkeitsdichtefunktion ist durch die
beiden Parameter Erwartungswert µ und Streuung oder Standardabweichung σ bestimmt6 . Diese gilt es aus einer Stichprobe mit einem Umfang von n Messwerten (Stichprobenumfang)
durch statistische Analyse zu schätzen, um daraus einen Bereich zu berechnen in dem sich der
„wahre Wert“ der gesuchten Grösse mit einer bestimmten Wahrscheinlichkeit befinden wird.
Gemäss GUM wird aus den n Messwerten xk mit k = 1, 2, . . . n ein Schätzwert für den
Erwartungswert µ durch Mittelwertbildung gebildet:
n
mX =
1X
xk
n
(1)
k=1
Da die erhaltenen (zeitdiskreten) Messwerte von Stichprobe zu Stichprobe verschieden ausfallen können, ist auch die Schätzung für den Mittelwert eine Zufallsgrösse, die einer gewissen
Streubreite unterliegt7 . Um letztere zu ermitteln, wird nach GUM ein Schätzwert für die Streuung σ der Messwerte berechnet8 :
v
v
u
!2
u
n
n
n
u
X
X
u 1 X
2 u 1
1
sX = t
xk − mX = t
x2k −
xk
(2)
n−1
n−1
n
k=1
k=1
k=1
Unter der Annahme der Unabhängigkeit unter den einzelnen Messwerten9 , kann mittels statistischen Überlegungen gezeigt werden, dass die Streuung smX des geschätzten Mittelwertes
von der Streuung sX der Messwerte wie folgt abhängt (cf Anhang B.3):
sX
smX = tn−1 · √
n
5
(3)
meistens einer zeitkontinuierlichen Grösse x(t), welche durch die Messung zu bestimmten Zeitpunkten abgetastet wird und so zu einer zufälligen Folge von zeitdiskreten Messwerten führt
6
Die Streuung einer stochastischen Grösse ist ein statistisches Mass für die Unsicherheit dieser Grösse.
Im (üblichen) Fall einer Normalverteilung (Gauß-Verteilung) der Zufallsgrösse, beträgt die Wahrscheinlichkeit 68.27%, dass die Zufallsgrösse sich im Bereich ±σ um deren Mittelwert befindet (so genannter
68%-Vertrauensbereich).
7
Unter der Annahme eines stationären Verhaltens der zufälligen Grösse, wird diese Schätzung besser mit
grösser werdendem Stichprobenumfang.
8
Die rechte Seite der Formel (2) ist für die numerische Berechnung aufbereitet.
9
Etwas salopp ausgedrückt: aufeinanderfolgende Messwerte sollen keine Verwandtschaft zeigen. Diese Annahme
ist nicht immer gegeben!
9
2. Bestimmung der Messunsicherheiten
Der Faktor tn−1 mit n−1 Freiheitsgraden und einem gegebenen Vertrauensbereich kann aus der
Student-Verteilung aus der Tabelle B.3 entnommen oder mit den Matlab-Anweisungen gemäss
Listing 2 und 3 im Anhang B.3 berechnet werden. Der Vertrauensbereich gibt an mit welcher
Wahrscheinlichkeit sich die gesuchte physikalische Grösse im Intervall mX ± k · smX befindet,
wobei die Intervallgrösse durch den so genannten Vertrauensfaktor k festgelegt wird. Üblich
ist k = 1: Dies entspricht der Wahrscheinlichkeit von 68.27% die gesuchte Grösse im Intervall
mX ± smX zu finden (cf. Beziehung (22) im Anhang B.1). Für ausgewählte Fachgebiete gelten
andere Vertrauensfaktoren wie z. B. in der Tabelle 1 aud S. 14 aufgelistet.
Beispiel: Messung eines elektrischen Widerstands
Die wiederholte Messung eines Widerstands R mit einem Digitalmultimeter (DMM) ergab
die folgenden 5 Messwerte in Ω (Ohm): 98.00, 102.30, 100.69, 99.25, 101.21. Angenommen
wird hier, dass der systematische Messfehler, welcher durch die Zuleitungsdrähte erzeugt wird
(0.20 Ω) abgezogen wurde.
Nach den Formeln (1) und (2) erhält man als Schätzungen für Mittelwert und Streuung der
Messwerte mR = 100.290 Ω und sR = 1.6861 Ω. Bei n = 5 Messwerten und dem Vertrauensfaktor k = 1 ergibt sich für den t-Faktor t4 = 1.14 (cf. B.3) und somit nach Formel (3) für die
Streuung des geschätzten Mittelwerts smR = 0.8596 Ω.
Als Schätzung für den Widerstandswert R nimmt man den (geschätzten) Mittelwert mR und
für die entsprechende Messunsicherheit Typ A (geschrieben: uA (R)) die (geschätzte) Standardabweichung smR . Der Messwert und seine Messunsicherheit Typ A für den Widerstand kann
nun für den Vertrauensfaktor k = 1 und mit korrekten Rundungen (cf. D.3) wie folgt angegeben
werden:
R = mR ± uA (R) = 100.29 Ω ± 0.86 Ω (k = 1)
2.2.2. Unsicherheit Typ B
Um den Anteil der Messunsicherheit, welcher aus dem verwendeten Messgerät herrührt zu ermitteln, stehen in den meisten Fällen nur Herstellerangaben zur Verfügung. Diese sind aber keine statistischen Angaben im Sinne einer bekannten Wahrscheinlichkeitdichtefunktion mit ihren
Parametern, sondern liegen als Garantiefehlergrenze vor: Diese garantieren (zu 100%!), dass
sich das angezeigte Messergebnis innerhalb dieser Grenze befindet. Die Garantiefehlergrenze
besteht im Allgemeinen aus zwei unabhängigen Anteilen: die Unsicherheiten in der Empfindlichkeit und im Nullpunktabgleich des Messgeräts. Diese werden üblicherweise pauschal in
einer der folgenden Formen angegeben:
± x% v. MW + y% v. MB oder
(4)
± x% v. MW + ny dgts
(5)
Die Empfindlichkeit ist abhängig vom Messwert (MW), die Nullpunktabweichung vom Messbereich (MB). Das Kürzel dgts steht für Digits: Damit ist die Auflösung der digitalen Anzeige
gemeint, d. h. das Gewicht der kleinsten angezeigten Stelle.
Die Abbildung 4 zeigt diese zwei Unsicherheitsquellen in Funktion des Messwerts, hier allerdings stark überzeichnet, um die Unterschiede hervorzuheben.
Die nach Gleichung (4) oder (5) bestimmte Garantiefehlergrenze, wäre als Messunsicherheit
nicht realistisch, da eine Kumulation von unabhängigen Fehlertermen, die alle in die „selbe
10
2. Bestimmung der Messunsicherheiten
Richtung“ zeigen sicher sehr unwahrscheinlich ist. Für das Vorgehen schlägt GUM folgende
Annahmen vor:
• Die beiden Unsicherheitsquellen sind voneinander unabhängig.
• Deren Wahrscheinlichkeitsdichtefunktionen sind gleichverteilt (cf. B.2 in Anhang B). Daraus lassen sich mit der Gleichung (24) die Streuungen für die beiden Unsicherheitsfaktoren
wie folgt berechnen:
sE =
sN
=
sN
=
x% v. MW
√
3
y% v. MB
√
oder
3
ny · Auflösung
√
3
(6)
(7)
Nach dem zentralen Grenzwertsatz der Wahrscheinlichkeitstheorie nähert sich die Summe von
mehreren unabhängigen Zufallsvariablen einer Normalverteilung. Die Varianz (Quadrat der
Streuung) dieser Verteilung entspricht dabei der Summe der Varianzen der einzelnen beitragenden Zufallsgrössen. So wird die Streuung der Unsicherheit Typ B nach folgender Formel
bestimmt:
uB =
q
s2E + s2N
11
(8)
2. Bestimmung der Messunsicherheiten
Abbildung 4: Empfindlichkeits- und Nullpunktabweichungsunsicherheiten (stark übertrieben)
Im Nullpunktunsicherheitsband sind allgemein auch Abweichungen infolge Nichtlinearität der Messkennlinie berücksichtigt. Im Allgemeinen ist dieses Band
schmäler gegenüber der Empfindlichkeitsunsicherheit als hier dargestellt.
12
2. Bestimmung der Messunsicherheiten
Beispiel: Unsicherheit Typ B eines DMM
Im Datenblatt des Hameg HM8012 Digitalmultimeters (cf. Anhang F) steht für den Messbereich
50 mA / DC folgende Angabe zur Garantiefehlergrenze:
± 0.2% v. MW + 0.004% v. MB
Bei einem Messwert von 45 mA erhält man aus den Beziehungen (6), (7) und (8):
s
2
2
q
0.002 · 45 + 0.00004 · 50
2
2
= 0.05197 mA
uB = sE + sN =
3
Hier dominiert der Anteil der Empfindlichkeit. Bei einem Messwert im unteren Teil des Messbereichs aber wirkt sich die Nullpunktabweichung stärker aus, z. B. mit einem Messwert von
6 mA ergibt sich
s
2
2
q
0.002
·
6
+
0.00004
·
50
uB = s2E + s2N =
= 0.007024 mA
3
Die absolute Unsicherheit erscheint hier insgesamt kleiner geworden zu sein. Sie ist aber bezogen
auf den Messwert (relative Unsicherheit) im zweiten Fall etwas grösser. Die Anteile Empfindlichkeit und Nullpunktabweichung wären bei einem Messwert von 1 mA gleich gross. In diesem
Fall sollte aber der empfindlichere Messbereich benutzt werden.
Messwerte im unteren Teil des Messbereichs eines Messgeräts weisen grössere relative Messunsicherheiten auf als im oberen Teil. Der Messbereich sollte immer so empfindlich gewählt
werden, damit im oberen Teil des Bereichs gemessen werden kann.
13
2. Bestimmung der Messunsicherheiten
2.2.3. Kombinierte Unsicherheit Typ C und erweiterte Messunsicherheitsangabe
Da die Messunsicherheiten der beiden Typen gemeinsam auftreten können, müssen sie noch
zusammengefügt werden. Dies geschieht unter der Annahme ihrer Unabhängigkeit durch Addition der Varianzen, wie schon im Zusammenhang mit der Unsicherheit Typ B erläutert wurde:
uC =
q
(9)
u2A + u2B
Zu jeder Messunsicherheit gehört auch eine Angabe über den Vertrauensbereich in Form des
entsprechenden Vertrauensfaktors. Dieser gibt die Breite des Intervalls um den Mittelwert
einer Normalverteilung an, ausgedrückt in Anzahl Streuungen oder Standardabweichungen. Damit lässt sich die Wahrscheinlichkeit, dass sich die gesuchte Grösse in diesem Intervall befindet
gemäss der Beziehung (22) im Anhang B.1 berechnen. Welche Konvention dabei benutzt wird,
hängt vom Usus der verschiedenen Fachgebieten ab, wie aus der folgenden Tabelle entnommen
werden kann:
Tabelle 1: Fachgebiete und übliche Vertrauensbereiche
(ASTM steht für American Society for Testing and Materials:
http://en.wikipedia.org/wiki/ASTM_International)
Vertrauensfaktor
(für erweiterte
Unsicherheit)
k=1
Fachgebiet
Physik und Vermessungswesen
physikalische Naturkonstanten
industrielle Messtechnik
ASTM Standards
Biologie
sicherheitsrelevante Anwendungen wie z. B.:
Bremstechnik, Luft- & Raumfahrtechnik
14
Wahrscheinlichkeit
(Grad des
Vertrauens)
68.27%
k = 1.96
k=2
k=3
95.00%
95.45%
99.73%
k=4
99.9937%
2. Bestimmung der Messunsicherheiten
2.2.4. Fehlerfortpflanzung
Wird eine Grösse rechnerisch durch gemessene Grössen ermittelt, so stellt sich die Frage, wie
die Unsicherheitsschranke dieser indirekt bestimmten Grösse aus den Unsicherheiten der
gemessenen Teilgrössen bestimmt werden kann. Für die hier gemachten Überlegungen sollen
die folgenden Annahmen und Festlegungen gelten:
• Für die aus n Teilgrössen x1 , . . . , xn zusammengesetzte Grösse y wird die folgende Funktion als bekannt vorausgesetzt:
y = f (x1 , x2 , . . . , xn )
(10)
Der indirekt ermittelte „Messwert“ my von y wird aus den Messwerten mx1 , . . . , mxn der
Teilgrössen x1 , . . . , xn nach derselben Funktion bestimmt:
my = f (mx1 , mx2 , . . . , mxn )
(11)
• Es wird angenommen, dass die Messwerte mx1 , . . . , mxn voneinander unabhängig sind10 ,
d. h. ihre zufälligen Werte nicht von einander abhängen und dass die Unsicherheiten
uC (x1 ), . . . , uC (xn ) der einzelnen Messungen gegeben sind (Vertrauensfaktor k = 1).
Um die Messunsicherheit eines Ergebnisses zu bestimmen, welches aus mehreren fehlerbehafteten Grössen berechnet wird, muss die Empfindlichkeit des Ergebnisses auf die einzelnen
Komponenten ermittelt werden. Diese kann bei nicht allzu grossen Fehlertermen durch Linearisierung, d. h. bilden der partiellen Ableitung11 bestimmt werden. Die geschätzte Unsicherheit
u(y) der Grösse y berechnet sich aus den Unsicherheiten uC (x1 ) , . . . , uC (xn ) der unabhängigen
Grössen xk wie folgt:
s
∂f 2
∂f 2
∂f 2
u(y) =
uC (x1 )2 +
uC (x2 )2 + · · · +
uC (xn )2
(12)
∂x1
∂x2
∂xn
Die Gleichung (12) führt bei elementaren Operationen bestehend nur aus Summen/Differenzen
oder Produkte/Quotienten auf die vereinfachten Regeln gemäss der Tabelle 2 auf S. 16. Bei
Funktionen mit gemischten Operationen (Summen/Differenzen/Produkte/Quotienten) sollte
die allgemeine Regel nach Gleichung (12) mit den Ableitungen herangezogen werden. Eine
Zusammenstellung der Empfindlichkeiten für die gebräuchlichsten Funktionen ist in der Tabelle
im Anhang C zu finden.
10
11
Dies bedeutet auch, dass die Grössen x1 , . . . , xn ebenfalls voneinander unabhängig sein müssen.
Partiell bedeutet teilweise. Bei einer Funktion von mehreren (unabhängigen) Variablen kann die Ableitung
nach jeder dieser Variablen einzeln gebildet werden. Dabei werden die anderen Variablen (nach welchen
gerade nicht abgeleitet wird) als konstant angenommen. Um dies Hervorzuheben, werden die Differentiale
mit einem „runden“ ∂ geschrieben, anstelle des gewöhnlichen d, wie bei Funktionen mit nur einer Variablen.
15
2. Bestimmung der Messunsicherheiten
Tabelle 2: Vereinfachte Fehlerfortpflanzungsregeln für elementare Verknüpfungen
Art der Verknüpfung
Regel der Fehlerfortpflanzung
vereinfachte Regel:
Summe der absoluten Varianzen
Summe oder
y = x1 + x2
u(y) =
Differenz
y = x1 − x2
p
uC (x1 )2 + uC (x2 )2
"
allgemein:
· Mix
y = x1 − x2 + x3
u(y) =
p
uC (x1 )2 + uC (x2 )2 + uC (x3 )2
Vorsicht:
· Vielfache
y = x1 − 2 · x2
· Faktoren
y=
q
2
u(y) = uC (x1 )2 + 2 · uC (x2 )
1p
u(y) = 2 uC (x1 )2 + uC (x2 )2
x1 −x2
2
vereinfachte Regel:
Produkt oder
y = x1 x2
Quotient
y = x1
2
allgemein:
· Mix
Summe der relativen Varianzen
u(y)
my =
r
uC (x1 )
mx1
x
2
+
uC (x2 )
mx2
+
uC (x2 )
mx2
2
"
x x
y = x1 2
3
u(y)
my =
r
x2
y = x1
2
u(y)
my =
r
uC (x1 )
mx1
2
2
+
Vorsicht:
· Potenzen
16
1)
2 uCm(x
x
1
2
+
uC (x2 )
mx2
2
uC (x3 )
mx3
2
2. Bestimmung der Messunsicherheiten
2.2.5. Zusammenfassung des Verfahrens nach GUM
1. Systematische Abweichungen: Abklären der systematischen Abweichungen und gegebenenfalls Korrektur derselben
2. Zufällige Unsicherheiten:
a) Ermitteln des Mittelwerts (beste Schätzung) für die gesuchte Grösse (Wahl der Stichprobengrösse und des Abtastintervalls)
b) Bestimmen der Standardunsicherheit Typ A
c) Bestimmen der Standardunsicherheit Typ B
d) Bestimmen der kombinierten Standardunsicherheit Typ C
e) Bestimmen der erweiterten Unsicherheit basierend auf dem gewünschten Vertrauensniveau
3. Vollständiges Messergebnis angeben: Messwert mit Messunsicherheit und Vertrauensfaktor
Graphisch sind diese Schritte in der Abbildung 5 dargestellt. Der „wahre Wert“ der gesuchten
Grösse bleibt unbekannt. Er kann nur mit einer bestimmten Wahrscheinlichkeit innerhalb des
Vertrauensbereichs vermutet werden.
Abbildung 5: Darstellung des systematischen Messfehlers und der verschiedenen zufälligen
Messunsicherheiten. Der „wahre Wert“ der gesuchten Grösse bleibt unbekannt.
Er kann nur mit einer bestimmten Wahrscheinlichkeit innerhalb einer Schranke
vermutet werden: Dabei ist nicht einmal absolut sicher, ob er sich auch wirklich
innerhalb dieser Schranke befindet!
17
2. Bestimmung der Messunsicherheiten
2.2.6. Praktische Regeln
Da für die kombinierte Messunsicherheit die stochastischen Schwankungen der gesuchten Grösse
(Unsicherheit Typ A), sowie die Präzision des Messgeräts (Unsicherheit Typ B) eine Rolle
spielen, stellt sich die Frage nach der Wahl eines geeigneten Messgeräts für die Durchführung
der Messung. Aus Formel (9) ist ersichtlich, dass beide Anteile eine vergleichbare Rolle spielen,
wenn sie in der selben Grössenordnung liegen. Daraus ergeben sich die folgenden praktischen
Empfehlungen:
• Es sollte ein Messgerät verwendet werden, dessen Unsicherheit in der Grössenordnung der
zu erwartenden Unsicherheit infolge Messwertschwankungen liegt.
• Beim Vorhandensein von nur einem Messwert, wenn z. B. keine zufälligen Schwankungen beobachtbar sind, besteht die Messunsicherheit nur aus den Ungenauigkeiten des
Messgeräts. Dies ist sicher nicht problematisch, wenn diese Eigenschaft die dominante
Unsicherheitsquelle ist und die für die Messung geforderte Genauigkeit damit erfüllt ist.
Ist letzteres nicht gegeben, so muss ein präziseres Messgerät verwendet werden.
Sind Forderungen bezüglich der Messgenauigkeit gegeben oder Angaben über die Qualität eines
Messgeräts zu machen, so sollte die „Faktor 10 Regel“ benutzt werden (cf. Tabelle S. 18):
Tabelle 3: Faktor 10 Regel der Messtechnik nach M. Bantel [4]
Faktor 10 Regel
Beispiel
Die Messunsicherheit eines Messgeräts sollte
höchstens 1/10 der geforderten Messunsicherheit einer mit einem Messgerät
durchzuführenden Messung betragen.
Um eine elektrische Spannung auf ±1 mV
sicher zu messen, sollte mit einem Voltmeter gearbeitet werden, welches eine Messunsicherheit von max. ±100 µV aufweist.
Die Messunsicherheit eines Messgeräts sollte
beim Vermessen eines Bauteils höchstens
1/10 der Bauteiltoleranz betragen.
Um 1 kΩ-Widerstände der Toleranzklasse
von 1% zu kontrollieren, sollte ein
Ohmmeter mit einer maximalen Messunsicherheit von ±1 Ω benutzt werden.
Die Messunsicherheit eines Messgeräts A
sollte höchstens 1/10 der geforderten Messunsicherheit des Messgeräts B betragen,
wenn das Gerät A dazu verwendet wird,
das Gerät B hinsichtlich der Grösse seiner
Messunsicherheit zu beurteilen.
Um die Genauigkeit einer Messschraube mit
einer Messunsicherheit von ±10 µm
beurteilen zu können, sollte mit einem
Koordinatenmessgerät mit einer Messunsicherheit von ±1 µm gearbeitet werden.
Bei mechatronischen Systemen muss die
Messunsicherheit einer Messeinrichtung um
den Faktor 10 kleiner sein, als die geforderte
Stellgenauigkeit des Aktors.
Die Position eines Werkzeugtisches muss
mit einer Messunsicherheit von ±1 µm
bestimmt werden, wenn auf ±10 µm
genau positioniert werden soll.
18
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
Um physikalische Grössen messtechnisch zu erfassen, werden Messaufnehmer (Sensoren) benötigt, mit denen über einen physikalischen Effekt, die gesuchte Grösse in der Regel in eine
elektrische Spannung umgesetzt werden kann. Die folgende Tabelle gibt einen groben Einblick
in die Vielfalt der Methoden:
Tabelle 4: Zusammenstellung von physikalischen Effekten als Funktionsprinzip einiger Messaufnehmer (unvollständig)
Bemerkenswert ist, das viele Grössen über die Messung eines Widerstandswerts (resistiver Effekt) bestimmt werden können.
zu messende
Grösse:
Ort
Kraft
Druck
Temp.
Licht
resistiv
kapazitiv
magnetisch
×
×
×
×
×
×
×
×
×
×
×
thermisch
optisch
pyroelektrisch
×
Gas
magn.
Feld
Messeffekt:
piezzoelektrisch
piezzoresistiv
chemisch
×
×
×
×
×
×
×
×
×
×
×
×
×
×
×
×
×
Im folgenden soll exemplarisch gezeigt werden, wie die Temperatur und mechanische Spannungen mittels Widerstandsänderung erfasst werden können. Einzelne dazu verwendbare elektrische Messschaltungen, unter anderem Messbrücken, sind im Anhang E vorgestellt.
3.1. Resistive Temperaturmessung
Für die Temperaturmessung wird die Temperaturempfindlichkeit von Metall- oder Halbleiterwiderständen benutzt: typische Vertreter dieser Technik sind Platin-Temperatursensoren,
wie PT100 oder Heissleiter wie NTC-Widerstände. Für beide Sensortypen eignen sich die
Schaltungen „Viertelbrücke“, "Dreileiter-Schaltung“ und „Vierleiter-Schaltung“ gemäss den Abbildungen 16, 17 und 18 aus dem Anhang E.
3.1.1. PT100
Da der spezifische Widerstand eines Metalls in der Regel temperaturabhängig ist, kann auf
Grund des Widerstands R eines metallischen Leiters auf seine Temperatur θ (in ℃) geschlossen
werden. Die DIN EN 60751 (gemäss IEC 751) legt für die Kennlinie des PT100 Platinwiderstands zwei Temperaturbereiche fest und definiert sie durch folgende Polynome:
19
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
• −200 ℃ ≤ θ < 0 ℃:
R = R0 · 1 + A · θ + B · θ2 + C · (θ − 100 ℃) · θ3
(13)
R = R0 · 1 + A · θ + B · θ2
(14)
• 0 ℃ ≤ θ ≤ 850 ℃:
mit den folgenden Parameterwerten:
R0 = 100 Ω
A = 3.9083 · 10−3 ℃−1
B = −5.775 · 10−7 ℃−2
C = −4.183 · 10−12 ℃−4
θ ist dabei die Temperatur in ℃.
Tabelle 5: Zulässige Grenzabweichungen (Garantiefehlergrenzen) für PT100 nach DIN IEC 751
Toleranzklasse
Zulässige Abweichung in ℃:
Zulässige Abweichung in Ω:
Klasse A
0.15 + 0.002 · |θ|
0.06 + 0.0007 · |θ|
Klasse B
0.30 + 0.005 · |θ|
0.12 + 0.0018 · |θ|
1/2 DIN Klasse B
0.15 + 0.005 · |θ|
0.06 + 0.0018 · |θ|
Abbildung 6: Darstellung der Garantiefehlergrenzen nach DIN IEC 751 für die Toleranzklassen
A und B gemäss der Tabelle oben
Da aus dem gemessenen Widerstand die Temperatur bestimmt werden soll, müssen die zu
den Gleichungen oben inverse Funktionen berechnet werden. Formal ergibt sich für die inverse
20
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
der Beziehung (14):
−A +
q
A2 − 4B 1 −
θ=
R
R0
2B
(15)
Das Datenblatt eines Platin-Temperatursensors (Heraeus M422) ist im Anhang H zu finden.
Darin sind weitere wichtige Angaben zu finden, wie z. B. die Messtromstärke und die Selbsterwärmung.
Vereinfachung: Für den begrenzten Temperaturbereich zwischen 0 ℃ und 100 ℃ kann die folgende Gerade mit α0 = 3.850 · 10−3 ℃−1 als Näherung für die R-θ-Charakteristik dienen:
R = R0 · (1 + α0 · θ)
θ =
(16)
1R
−1
α0 R0
3.1.2. NTC
NTC oder Heissleiter sind Halbleiter mit negativem Temperaturkoeffizient (negative temperature
coefficient), d. h. ihr Widerstandswert nimmt mit der Temperatur nach der folgenden allgemeingültigen Beziehung ab:
R = R25 · exp B25
1 1
−
T
T25
(17)
Dabei sind z. B. für den NTC EPCOS B57164K033112 :
R25 = 330 Ω (Bezugswiderstand bei 25 ℃)
B25 = 3450 K
T25 = 298.15 K, entspricht 25 ℃
T
:
absolute Temperatur in K
Die dazu inverse Funktion lautet:
T =
ln
B25
+
R
R25
B25
T25
(18)
Bemerkung: Die R-T-Charakteristik eines NTC ist stark nichtlinear. Durch parallelschalten eines Widerstands Rp lässt sich dies für ein bestimmtes Intervall auf Kosten der Empfindlichkeit
nahezu beheben. Sei das Intervall T1 ≤ T ≤ T2 und die mittlere Temperatur im Intervall
2
Tm = T1 +T
2 , so beträgt der optimale Parallel-Widerstand
Rp = Rm ·
− 2 Tm .
B25 + 2 Tm
B
25
Dabei muss der Widerstand R = Rm für T = Tm nach Gleichung (17) bestimmt werden.
12
Das entsprechende Datenblatt ist im Anhang I zu finden.
21
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
3.2. Messung mechanischer Spannungen mittels DMS
Dehnungsmessstreifen (DMS, englisch: strain gauge) sind resistive Messaufnehmer zur Bestimmung von mechanischen Verformungen und der daraus abgeleiteten Ursachen, wie statische
Dehn-, Stauch-, Quer- und Scherkräfte oder dynamische Kräfte infolge Beschleunigung. DMS
werden hauptsächlich für die folgenden Anwendungsgebiete eingesetzt: Kraft-, Druck-, Drehmomentmesstechnik, mechanische Schwingungsanalyse, Verformungsüberwachung.
3.2.1. Funktionsprinzip
Wird ein Draht mechanisch in die Länge gezogen, so nimmt seine ursprüngliche Länge l0 um
∆l zu und sein ursprünglicher Radius r0 um ∆r ab. Die Verhältnisse sind in der Abbildung 7
dargestellt.
Abbildung 7: Mechanische Beanspruchung eines Drahts bei Zug
l0 → l = l0 + ∆l (mit ∆l > 0) und r0 → r = r0 + ∆r
(mit ∆r < 0)
Bei Zug wird also der Drahtwiderstand grösser: formal sind die Zusammenhänge zwischen
den geometrischen Massen Drahtlänge l, Drahtquerschnittfläche A = πr2 und dem spezifischen
Widerstand ρ wie folgt:
R0 = ρ
l0
πr02
→
R=ρ
l
πr2
∆l
Die relative Widerstandsänderung ∆R
R in Funktion der Dehnung = l lässt sich durch
Linearisierung (partielle Ableitungen) bestimmen. Dabei wurde noch die (temperaturbedingte)
Änderung des spezifischen Widerstands mit einbezogen:
∆R =
∂R
∂R
∂R
∆ρ
∆l
∆r
∆ρ +
∆l +
∆r = R
+R
− 2R
∂ρ
∂l
∂r
ρ
l
r
Mit der Poisson’schen Zahl µ, welche den Zusammenhang zwischen Längsdehnung und Querkontraktion (linear) beschreibt
∆r
∆l
= −µ
= −µ
r
l
ergibt sich, bezogen auf den entlasteten Widerstand R0 und der entsprechenden Dehnung
= ∆l
l0 :
∆ρ/ρ
∆R
∆ρ
=
+ + 2µ =
+ 1 + 2µ = k
(19)
R0
ρ
22
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
Der Faktor k aus der Formel (19) liefert den linearisierten Zusammenhang zwischen der relativen
Widerstandsänderung und der Dehnung 13 . Dieser k-Faktor ist wegen der Abhängigkeit von ρ
auch Temperaturabhängig. Eine positive Dehnung entspricht einer „Streckung“ des DMS, eine
negative wird durch „Stauchung“ erhalten. Die Widestandsänderung hat also ein Vorzeichen je
nachdem wie der DMS belastet wird.
Mit dem Hooke’schen Gesetz σ = E und dem Elastizitätsmodul E lässt sich die mechanische Spannung σ = FA und damit die auf den Draht wirkende Kraft F bestimmen.
3.2.2. Eigenschaften
Die Messempfindlichkeit eines DMS wird mit der wirksamen Länge des Messwiderstands erhöht. Dies wird durch eine mäanderförmige Auslegung der Widerstandsbahn erreicht, wie in
Abbildung 8 gezeigt wird.
Abbildung 8: DMS mit typischer mäanderförmigen Widerstandsbahn zur Erhöhung der Messempfindlichkeit
Empfindlich auf Streckung oder Stauchung sind die dünnen Stellen des
Widerstandleiters.
In der folgenden Tabelle sind einige k-Faktoren aufgeführt. Typische Werte für die maximale
Dehnung liegen zwischen 1'000 µm/m für Halbleiter-DMS und 50'000 µm/m für Folien-DMS.
Tabelle 6: Zusammenstellung diverser DMS-Materialien mit ihren k-Faktoren
Material / Bezeichnung
Zusammensetzung
Constantan
Nichrome V
Chromol C
Platin-Wolfram
Platin
Silizium (p-Typ)
Silizium (n-Typ)
54% Cu, 45% Ni, 1% Mn
80% Ni, 20% Cr
65% Ni, 20% Fe, 15% Cr
92% Pt, 8% W
100% Pt
mit ppm B dotiertes Si
mit ppm P dotiertes Si
k-Faktor
2.05
2.2
2.5
4.0
6.0
+80 · · · + 190
−100 · · · − 25
lin. Ausdehnungskoeff. α0 in 10−6 ℃ −1
14.9
14
15
9
4.7 · · · 7.6
4.7 · · · 7.6
In der Tabelle sind auch die Temperaturkoeffizienten angegeben, mit denen die thermisch bedingte Dehnung des mechanisch unbelasteten DMS-Materials bestimmt werden kann: ∆ll0th = α0 θ.
13
Die Dehnung ist die relative Längenänderung des Drahts.
23
3. Anwendungsbeispiele mit Widerstand als Messaufnehmer
Damit die Temperatur zu keiner vermeintlichen mechanisch bedingten Dehnung führt, sollte
das Substrat des vermessenen Materials den selben Temperaturausdehnungskoeffizient haben
wie der DMS. Weitere Störeffekte sind durch den Klebstoff und die Alterung bedingt: der DMS
kann kriechen oder sich von seinem Substrat lösen.
Typische DMS-Widerstandswerte sind 120, 350, 600, 700 und 1000 Ω. DMS können Frequenzen bis zu mehreren MHz noch korrekt verarbeiten, eignen sich also auch zur Aufnahme von
sehr schnellen Vorgängen wie z. B. Vibrationen.
3.2.3. Messschaltungen
Zur Messung von mechanischen Beanspruchungen werden meistens mehrere DMS in Halb- oder
Vollbrücken (cf. Abbildung 15, S. 37) eingesetzt14 . Ein Beispiel für eine Vollbrücke zur Messung
der Verbiegung eines einseitig eingespannten Balkens ist in Abbildung 9 dargestellt.
Abbildung 9: Anordnung von vier DMS für eine Vollbrückenschaltung zur Messung der Biegebelastung eines einseitig eingespannten Balkens (Bild-Quelle: http://www.
me-systeme.de/dehnungsmessstreifen/dms-grundlagen/dmsplan.html)
Die oberen DMS werde bei Belastung (FZ ) gestreckt, die unteren gestaucht.
Bemerkung: Die Bezeichnungen der Widerstände R3 und R4 müssen vertauscht
werden, um zu den Bezeichnungen der Vollbrücke im Anhang zu passen.
14
Ein Überblick über die diversen Beschaltungsmöglichkeiten ist unter dem folgendem Link der Firma MEMeßsysteme GmbH zu finden: http://www.me-systeme.de/dehnungsmessstreifen/dms-grundlagen/index.html,
Grundlagen zur Brückenschaltung und Verdrahtungspläne.
24
A. SI-Einheiten
A. SI-Einheiten
Das Système International d’Unités (SI-System) definiert die sieben Basiseinheiten: Meter für
die Länge, Kilogramm für die Masse, Sekunde für die Zeit, Ampère für die Stromstärke,
Kelvin für die Temperatur, Mol für die Stoffmenge und Candela für die Lichtstärke (cf.
Tabelle).
Tabelle 7: SI-Basisgrössen und ihre Einheiten
Gebiet (Lehre von)
Basisgrösse
Geometrie (Raum)
Kinematik (Bewegung)
Dynamik (Trägheit, Impuls)
Elektromagnetismus
Thermodynamik
Chemie
Lichttechnik
Länge
+ Zeit
+ Masse
+ elektrische Stromstärke
+ Temperatur
Stoffmenge
Lichtstärke
typisches
Symbol
l
t
m
i, I
T
n
Iv
Basiseinheit
Meter
Sekunde
Kilogramm
Ampère
Kelvin
Mol
Candela
Einheitszeichen
m
s
kg
A
K
mol
cd
Beispiel elektrische Grössen
Die Einheit Ampère wird über die Kraftwirkung pro Leiterlänge, der so genannte Kraftbelag
( Fl in Newton pro Meter), die zwischen zwei stromdurchflossenen, unendlich langen, parallelen
Leitern im Abstand r wirkt. Die Kraft treibt die Leiter auseinander, wenn die Ströme in den
Leitern entgegengesetzt fliessen. Falls die Stromstärke I in beiden Leitern gleich gross ist, lautet
der allgemeine formelmässige Zusammenhang für den Kraftbelag wie folgt:
F
µ0 I 2
=
·
l
2π r
Für die magnetische Feldkonstante wurde folgender Wert festgelegt: µ0 = 4π · 10−7 N A−2 . Per
Definition, fliesst also in der Leitung eine Stromstärke von I = 1 A, wenn der Leiterabstand
r = 1 m und die Kraft pro Meter Leiterlänge 0.2 µN beträgt.
Die Realisiergenauigkeit (Reproduzierbarkeit mittels einer Stromwaage) dieser Definition
liegt bei einigen Millionstel (1 ppm ≡ 10−6 ), was beim heutigen Entwicklungsstand der elektrischen Messinstrumente kaum mehr genügt. Es ist in den nächsten Jahren zu erwarten, dass eine
neue Definition der Stromstärkeeinheit indirekt über Quanteneffekte festgelegt wird. Referenzspannungen (Spannungsnormale) können über den Wechselstrom-Josephson-Effekt durch
eine Frequenzmessung sehr genau festgelegt werden. Die Widerstandseinheit Ohm (Ω) wird
über den quantisierten Hall-Effekt definiert (Von-Klitzing-Konstante: RK = 25812.807 Ω).
Die erreichbare Realisiergenauigkeit für die Stromstärkeeinheit kann damit mindestens um den
Faktor 100 auf 10−8 verbessert werden.
Ende Beispiel
Neben den Basiseinheiten gibt es noch abgeleitete Einheiten mit eigenen Namen. Zum Beispiel:
Aus der Definition der Stromstärke (I = ∆Q
∆t ) ergibt sich für die Einheit der elektrischen Ladung
Q:
[Q] = [I] · [t] = A · s
(Ampère-Sekunde)
und daraus die abgeleitete Einheit Coulomb: 1 C = 1 A s.
25
A. SI-Einheiten
Wichtige Bemerkung: Die eckigen Klammern um das Symbol einer physikalischen Grösse
X sind eine Kurzschreibweise für „Einheit der Grösse X“, hier z. B: [Q] = A s = C.
Eine Zusammenstellung von einigen wichtigen abgeleiteten Einheiten mit ihren Namen15 sind
in der folgenden Tabelle aufgelistet.
Tabelle 8: Einige abgeleitete Einheiten
Grösse
elektrische Ladung
elektrische Kapazität
Celsius Temperatur
Induktivität
Frequenz
Energie
Kraft
elektrischer Widerstand
Druck
magnetische Flussdichte
elektrische Spannung, Potential
Energiestrom, Leistung
15
Name
Coulomb
Farad
Grad Celsius
Henry
Hertz
Joule
Newton
Ohm
Pascal
Tesla
Volt
Watt
Zeichen
C
F
◦C
H
Hz
J
N
Ω
Pa
T
V
W
entspricht
As
A s V−1
K
V s A−1
s−1
N m, V A s
kg m s−2
V A−1
N m−2
V s m−2
J A−1 s−1
J s−1 , V A
Aufgepasst: Namen der Einheiten sagen nichts aus über die Bedeutung der Grössen. Besser ist es sich die
physikalischen Zusammenhänge für die Einheiten zu merken, z. B. „Joule pro Ampère-Sekunde“ für „Volt“
oder „Volt, pro Ampère pro Sekunde“ für „Henry“.
26
B. Wahrscheinlichkeitsrechung
B. Wahrscheinlichkeitsrechung
B.1. Normalverteilung
Die Dichtefunktion der Normal - oder Gaußverteilung einer Zufallsvariablen X ist in der Abbildung 10 dargestellt und durch folgende Formel definiert:
(x−µ)2
1
p(x) = √ e− 2σ2
σ 2π
Die Parameter µ und σ 2 entsprechen dem Erwartungswert E(X) =
(20)
R∞
x · p(x) · dx = µ
−∞
Abbildung 10: Dichtefunktion p(x) und Verteilungsfunktion F (x) einer Zufallsgrösse X
Beide Funktionen sind als normierte Formen mit Erwartungswert µ = 0 und
Streuung σ = 1 dargestellt. Die Streuung entspricht einer Einheit auf der Abszisse. Die Amplitude der Dichtfunktion ist umgekehrt proportional zur Streuung,
da die Fläche unter dieser Kurve immer 1 beträgt. Bei einem Erwartungswert
verschieden von Null, verschiebt sich der Nullpunkt x = 0 nach diesem Wert.
und der Varianz D(X) =
R∞
(x − µ)2 · p(x) · dx = σ 2 der Verteilung. Die Streuung oder
−∞
Standardabweichung σ entspricht der Quadratwurzel der Varianz.
27
B. Wahrscheinlichkeitsrechung
Die Verteilungsfunktion der Zufallsvariable X lässt sich mit der Dichtefunktion p(x) wie folgt
bestimmen:
Zx
F (x) = P rob{X < x} =
p(ξ)dξ
−∞
Umgekehrt, lässt sich die Dichtefunktion aus der Verteilungsfunktion durch Differentiation nach
x ermitteln:
dF (x)
p(x) =
dx
Die Wahrscheinlichkeit, dass die Zufallsvariable X in das Intervall [a, b) zu liegen kommt (cf.
Abbildung 11 für den Fall a = −σ und b = σ), lässt sich gemäss Formel (21) oder numerisch
mit dem Programm gemäss Listing 1 berechnen :
Zb
P rob{a ≤ X < b} =
p(ξ)dξ = F (b) − F (a)
(21)
a
Für die Sonderfälle a = µ − kσ und b = µ + kσ ergibt sich:
k=1
P rob{µ − kσ ≤ X < µ + kσ} ≈ 68.27%
2
≈ 95.45%
3
≈ 99.73%
4
≈ 99.9937%
k = 0.675
P rob{µ − kσ ≤ X < µ + kσ} ≈ 50%
1.645
≈ 90%
1.960
≈ 95%
2.576
≈ 99%
(22)
Listing 1: MATLAB-Programm zur Berechnung der Wahrscheinlichkeit dass sich eine normalverteilte Zufallsvariable X im Intervall [a,b) befindet: Prob{a ≤ X < b}
% Wahrscheinlichkeitsberechnung
%
% Prob(a <= X < b), x ist normalverteilte Zufallsvariable
%
% ©2012, M. Schlup
clear all, clc
% Festlegungen:
mu=0;
% Erwartungswert der Normalverteilung
sig=1;
% Streuung der Normalverteilung
k=1.96;
% Vertrauensfaktor
a=−k*sig;
% untere Grenze
frei waehlbar
b=k*sig;
% obere Grenze, b > a
sonst frei waehlbar
% Berechnung:
Prob = cdf('norm',b,mu,sig)−cdf('norm',a,mu,sig)
28
B. Wahrscheinlichkeitsrechung
Abbildung 11: Darstellung der Wahrscheinlichkeit, dass eine Zufallsvariable sich im Intervall
µ ± σ befindet (hier dargestellt für µ = 0). Diese lässt sich als Fläche unter der
Dichtefunktion (graues Gebiet) oder als Differenz aus der Verteilungsfunktion
bilden (dicker, senkrechter Strich).
29
B. Wahrscheinlichkeitsrechung
B.2. Gleichverteilung
Die Dichtefunktion der Gleichverteilung einer Zufallsvariablen
gestellt und durch folgende Formel definiert:
1
a≤x≤b
b−a für
p(x) =
0
sonst
X ist in der Abbildung 12 dar
(23)
Abbildung 12: Dichtefunktion p(x) einer gleichverteilten Zufallsgrösse X
Die Funktion ist als normierte Form mit Erwartungswert µ = 0 und Streuung
σ = √13 ≈ 0.577 dargestellt. Die Streuung entspricht der halben Breite der
grauen Fläche. Bei einem Erwartungswert verschieden von Null, verschiebt sich
der Nullpunkt x = 0 nach diesem Wert.
Für den Erwartungswert der Gleichverteilung erhält man E(X) =
Rb
a
Rb
für die Varianz D(X) = (x − µ)2 p(x)dx =
a
xp(x)dx =
b+a
2
= µ und
a2 +ab+b2
.
3
Für den Sonderfall a = µ − c und b = µ + c erhält man
c
σ=√
3
(24)
Zur Berechnung von Wahrscheinlichkeiten gilt die selbe Formel (21) wie bei der Normalverteilung, allerdings, muss die Verteilungsdichte nach Gleichung (23) benutzt werden. Bei der
Gleichverteilung beträgt, anders als bei der Normalverteilung, die Wahrscheinlichkeit 57.7%,
dass sich die Zufallsgrösse im Bereich µ ± σ befindet.
30
B. Wahrscheinlichkeitsrechung
B.3. Bestimmung der Streuung des Mittelwerts
Der nach der Beziehung (1) geschätzte Wert der Messgrösse ist selber eine Zufallsvariable mit einer normalen Verteilungsdichte und entsprechender Streuung. Um letztere zu schätzen, benötigt
man die nach der Beziehung (2) geschätzte Streuung der Messwerte und es muss die StudentVerteilung16 herangezogen werden. Aus dieser muss ein Korrekturfaktor (t-Faktor) ermittelt
werden, mit dem die zusätzliche Unsicherheit infolge kleinem Stichprobenumfang berücksichtigt werden kann. Dieser Faktor kann aus der Tabelle B.3 oder mit den Matlab-Anweisungen
gemäss den Listings 2 und 3 ermittelt werden.
Listing 2: Aufrufprogramm zur Bestimmung des t-Korrekturfaktors mit MATLAB
%
%
%
%
%
%
Koeffizeinten der t−Verteilung (Student−Verteilung)
* Vertrauensfakor k=1 entspricht einem Vertrauensbereich +−68.27%
* Freiheitsgrad = Stichprobenumfang minus 1
©2011, M. Schlup
% Parameter der Normalverteilung
mu=0; sig=1;
% 1. Variante: Bestimmung der Wahrscheinlichkeit fuer bestimmten Vertrauensfaktor
k=1; % gewuenschter Vertrauensfaktor
prob=1−2*(1−cdf('norm',k*sig,mu,sig)); % entsprechende Wahrscheinlichkeit
% 2. Variante: gewuenschte Wahrscheinlichkeit
% prob=0.95;
% Wahl des Freiheitsgrads (degree of freedom)
dof=n−1 % Stichprobenumfang minus 1
t=t_factor(prob,dof) % t−faktor
Listing 3: MATLAB-Funktion zur Bestimmung des t-Korrekturfaktors für bestimmten Vertrauensbereich und verschiedene Freiheitsgrade
function t = t_factor(prob,dof)
% Berechnen des t−Faktors (Student−Verteilung)
% prob: Wahrschjeinlichkeit fuer Vertrauensbereich
%
dof: Freiheitsgrad (degree of freedom)
%
% ©2011, M. Schlup
t=tinv((1+prob)/2,dof);
16
Der englische Statistiker William Sealy Gosset (1876 - 1937) publizierte diese Verteilungsfunktion 1908 unter
dem Pseudonym Student.
31
C. Empfindlichkeiten
Tabelle 9: Vertrauensfaktor tn−1 für das Vertrauensniveau 68.27%
Anzahl Messungen
n
2
3
4
5
6
7
8
9
10
20
30
50
100
200
Freiheitsgrade
n−1
1
2
3
4
5
6
7
8
9
19
29
49
99
199
Vertrauensfaktor
tn−1
1.84
1.32
1.20
1.14
1.11
1.09
1.08
1.07
1.06
1.03
1.02
1.01
1.01
1.00
C. Empfindlichkeiten
Die Tabelle auf S. 33 enthält die (partiellen) Ableitungen der Funktion y nach den Grössen
xk . Diese Ableitungen beschreiben die linearisierte Empfindlichkeit von y auf die betrachtete
Grösse xk .
Die Inverse der Funktion y = f (x) lautet formal x = f −1 (y). Für die Empfindlichkeiten gilt
dabei folgende nützliche Beziehung:
x0 =
dx
1
1
= dy = 0
dy
y
dx
32
C. Empfindlichkeiten
Tabelle 10: Empfindlichkeiten – Tabelle der Ableitungen und partiellen Ableitungen für die
gebräuchlichsen Verknüpfungen
Funktion y = f (x1 , x2 , · · · )
∂f
∂x1
∂f
∂x2
∂f
∂x3
a
—
—
2ax + b
—
—
3a3 x2 + 2a2 x + a1
—
—
Funktionen einer Variablen:
y = ax
y = ax2 + bx + c
y = a3 x3 + a2 x2 + a1 x + a0
y = ax
1
−a x2
1
—
—
√
y=a x
a √1
2 x
—
—
a
b
—
2ax1 + bx2
bx1 + 2cx2
—
Funktionen zweier Variablen:
y = ax1 + bx2
y = ax21 + bx1 x2 + cx22 + d
x
y = a x1
2
x −x2
y = 1x
2
x x
y = x 1+x2
1
2
1
ax
2
1
x2
x
2
( x +x
)2
1
2
x
−a x12
—
x
—
2
− x21
2
x
1
( x +x
)2
1
2
—
Funktionen dreier Variablen:
x −x2
y = 1x
3
1
x3
33
1
−x
3
x −x2
− 1x2
3
D. Angabe der Messergebnisse
D. Angabe der Messergebnisse
D.1. Allgemeine Regeln zur Darstellung von Zahlenwerten
Beim Erstellen von Messprotokollen und -dokumentation, ist es notwendig alle Zahlenwerte mit
einer korrekten Anzahl signifikanten Stellen anzugeben. Signifikante Stellen einer Zahl sind
die Ziffern, welche als aussagekräftig erachtet werden, aber nicht die Anzahl Stellen hinter dem
Komma oder führende Nullen. Das heisst, eine Wertangabe wiedergibt schon eine Vorstellung
ihrer Genauigkeit auch ohne explizite Unsicherheitsangaben.
Beispiel: Die Spannungangabe 2 V hat nicht die selbe Bedeutung wie 2.00 V.
Im ersten Fall ist die indirekt angegebene Unschärfe ±0.5 V (±25%), im zweiten ±0.005 V
(±0.25%).
In einem Messprotokoll müssen Zahlenwerte mit der Anzahl signifikanten Stellen angegeben werden von der man annimmt, dass sie noch repräsentativ sind.
Werden Grössen aus Bestandteilen mit einer beschränkten Anzahl signifikanter Stellen durch
elementare Operationen gebildet, so gelten unabhängig von Unsicherheitsbetrachtungen die
folgenden Regeln:
• Summen und Differenzen
Bei der Bildung einer Summe oder einer Differenz müssen alle Stellen einen „StellenPartner “ haben:
richtig:
1.200 ± 0.002
oder
1.30 · 10−3 ± 0.14 · 10−3
falsch:
1.20 ± 0.002
oder
1.30 · 10−3 ± 140 · 10−6
• Produkte und Quotienten
Die Zahl der signifikanten Stellen eines Produkts oder eines Quotienten ist gleich der
kleinsten Zahl gültiger Stellen in den Faktoren:
richtig:
1.23 · 0.025 = 0.031
oder
1.23
0.025
= 49
falsch:
1.23 · 0.025 = 0.0308 oder
1.23
0.025
= 49.2
34
D. Angabe der Messergebnisse
D.2. Angabe von Einheiten
Bei der Angabe von einheitsbehafteten Zahlenwerten sind folgende Regeln einzuhalten:
• Zwischen Zahl und Einheit ist eine (kleine) Leerstelle zu lassen: 1.002 V oder 220 Ohm
und nicht etwa 10Ohm. Dies gilt nicht für eine Prozent- oder Promille-Angabe (z. B. 10%
oder 0.2‰)
• Einheiten (Einheitszeichen) dürfen nicht zwischen eckigen Klammern gesetzt werden.
Eckige Klammern sind eine nützliche Kurzschreibweise, um die Einheit einer physikalischen Grösse „herauszunehmen“: [U ] = mV bedeutet „die Einheit der Grösse U ist
Milli-Volt“. Die Unsitte eckige Klammern um Einheitszeichen zu setzen ist leider stark
verbreitet und sollte nicht weiter „gepflegt“ werden.
• Einheitenangaben in Graphiken sind ebenfalls nicht mit eckigen Klammern zu machen.
Dazu eignen sich z. B. für eine Spannung U in Volt folgende Varianten: → U in V, → U/ V
oder → U (V).
D.3. Angabe von Messwerten mit ihren Messunsicherheiten
Wenn es sich nicht um die Angabe von physikalischen Naturkonstanten handelt, wo die Messunsicherheit so eng wie nur möglich zu bestimmen ist, sondern um „ganz gewöhnliche“ Messwerte
mit Unsicherheiten im Prozent- oder Promille-Bereich, so sollte die Unsicherheit in der Regel
eine oder maximal zwei signifikante Stellen aufweisen. Dazu muss im Allgemeinen zweckmässig
gerundet werden. Dies sollte immer nur beim Endergebnis gemacht werden.
Beispiel
Ausganslage: mU ±uC (U ) = 30.281 V±0.457 V. Diese Angabe weisst eine zu feine Messunsicherheit auf: Es ist sinnlos bei einer relativen Unsicherheit von 1.5% eine dritte Stelle anzugeben,
welche einen Anteil von 0.003% des Messwerts ausmacht.
Die korrekte Rundung führt auf 30.28V ± 0.46V. Aber leicht weniger präzis aber genau so
korrekt:
U = 30.3 V ± 0.5 V (k = 1).
Als Variante kann anstelle der absoluten Unsicherheit die relative Unsicherheit angegeben
werden:
U = 30.3 V (1 ± 0.015) (k = 1).
Der (relative) Unsicherheitsterm 0.015 ergibt sich hier aus dem auf zwei signifikante Stellen
gerundeten Verhältnis 0.457/30.281.
35
E. Messschaltungen
E. Messschaltungen
E.1. Brückenschaltung
In der Messtechnik wird zur Bestimmung der Veränderung eines Widerstandswertes häufig mit
Messbrücken gearbeitet. Diese Schaltung ist in der Abbildung 13 als spannungsgespeiste und
als stromgespeiste Brückenschaltung dargestellt. Die Brückenspannung U wird im Allgemeinen mit einem hochohmigen Spannungsmessgerät oder Datenaquisitionsgerät erfasst.
Abbildung 13: Spannungs- (links) und stromgespeiste (rechts) Messbrücke (ohne Brückenwiderstand)
Um die Berechnungen zu erleichtern, kann das Verhalten beider Schaltungen durch eine
äquivalente Spannungsquellenersatzschaltung nachgebildet werden (cf. Abb. 14). Für die
Abbildung 14: Sappnungsquellenersatzschaltung einer Messbrücke (ohne Brückenwiderstand)
Ersatzgrössen UE und RE ergeben sich für die spannungsgespeiste Brücke:
UE =
R1 R4 − R2 R3
U0
(R1 + R2 )(R3 + R4 )
RE =
R1 R2
R3 R4
+
R1 + R2 R3 + R4
und für die stromgespeiste:
36
(25)
E. Messschaltungen
UE =
R1 R4 − R2 R3
I0
R1 + R2 + R3 + R4
RE =
(R1 + R3 )(R2 + R4 )
R1 + R2 + R3 + R4
(26)
Wie aus den Formeln (25) und (26) ersichtlich ist, ist die Spannung UE Null, wenn die Abgleichsbedingung erfüllt ist:
R1 R4 = R2 R3
beziehungsweise
R1
R3
=
R2
R4
In der Tabelle auf S. 38 sind die Eigenschaften der verschiedenen Ausführungsvarianten der
Brückenschaltung gemäss der Abbildung 15 zusammengestellt:
Abbildung 15: Messbrückenvarianten: Viertel-, Halb- und Vollbrücke (spannungsgespeist)
Die dunkel eingefärbten Widerstände sind diejenigen von denen die Veränderung
erfasst werden soll. Im Idealfall ist dann die Brückenspannung U proportional
zur Widerstandsänderung ∆R.
37
E. Messschaltungen
Tabelle 11: Eigenschaften der verschiedenen Brückenschaltungen (für stromlose oder hochohmige Messung der Mittenspannung U )
Der einheitslose aber vorzeichenbehaftete Parameter δ steht für die relative Widerstandsverstimmung: δ = ∆R
R
Viertelbrücke
Quasi-Halbbrücke
Halbbrücke
Vollbrücke
R1 = R(1 + δ)
R1 = R4 = R(1 + δ)
R1 = R4 = R(1 + δ)
R2 = R3 = R(1 − δ)
R2 = R3 = R4 = R
R2 = R3 = R
R1 = R(1 + δ)
R2 = R(1 − δ)
R3 = R4 = R
mit U0
δ
U
U0 = 4+2δ
δ
U
U0 = 2+δ
U δ
U0 = 2
U
U0 = δ
Empf.:
≈4
≈2
1
2
1
mit I0
U
δ
R I0 = 4+δ
U
δ
R I0 = 2
U
δ
R I0 = 2
U
R I0 = δ
Empf.:
≈4
1
2
1
2
1
1
1
1
E.2. Vermeidung von systematischen Fehlern
Da meistens der auszumessende Widerstand nicht unmittelbar bei der Messbrücke liegt, ist
unter Umständen eine längere Messleitung notwendig, welche die Symmetrie der Schaltung
bricht. Dabei führen die Widerstände der Zuleitung zu systematischen Fehlern, wie aus der
Schaltung für die Viertelbrücke gemäss der Abbildung 16 ersichtlich ist.
E.2.1. Dreileiter-Schaltung
Um keine systematischen Messfehler zu erhalten, gibt es bei Brückenschaltungen die Möglichkeit
mit einem zusätzlichen Leiter den Einfluss der Zuleitungswiderstände zu unterdrücken. Die ist
in der Abbildung 17 dargestellt. Sind dabei die Leiterwiderstände ∆R1 ud ∆R2 gleich gross,
so verschwindet der systematische Fehler.
E.2.2. Vierleiter-Schaltung (Kelvin-Klemmen)
Eine andere Möglichkeit zur Verhinderung von systematischen Fehlern besteht aus der Idee
der Entkopplung des stromführenden Pfads vom Spannungsmesspfad. Die Schaltung aus Abbildung 18 zeigt das Prinzip welches generell angewendet werden sollte: die Leitung für die
Spannungsmessung (sense connections, voltage lead) sollte immer stromfrei sein und von der
stromführenden Leitung (force connections, current lead) getrennt sein. Damit wird verhindert,
dass zusätzliche Potentialabfälle in der Messleitung mitgemessen werden.
38
E. Messschaltungen
Abbildung 16: Systematischer Fehler bei Viertelbrücke infolge Zuleitungswiderständen
Da die einzelnen Widerstände in Folge Exemplarstreuung im Allgemeinen voneinander abweichen, kann ein veränderlicher Abgleichwiderstand vorgesehen werden. Letzterer führt aber nur bei ∆R = 0 zu einem korrekten Brückenabgleich.
Abbildung 17: Messbrücke in Dreileiterschaltung
Der systematische Fehler infolge Zuleitungswiderständen verschwindet hier unter
der Bedingung ∆RL1 = ∆RL2 . Der Wert von ∆RL0 spielt für die Spannung U als
Mass für die Brückenverstimmung keine Rolle, er vermindert nur die Spannung
über der Messbrücke.
39
F. DMM-Datenblatt
Abbildung 18: Vierleiterschaltung (Kelvin-Klemmen)
Mit dieser Schaltung wird verhindert, dass Ströme in der Spannungsmessleitung
(sense lead) zu unerwünschten Verfälschungen führen: Die Potentialabfälle in
der stromführenden Leitung (force lead) werden so nicht erfasst. Dieses Prinzip sollte grundsätzlich für die Messung von Spannungen angewendet werden:
die Spannung soll direkt dort (hochohmig) abgegriffen werden, wo sie gemessen
werden soll.
F. DMM-Datenblatt
Auf den folgenden Seiten findet der Leser einen Auszug aus dem Datenblatt eines DigitalMultimeters von HAMEG.
Bemerkungen:
• Die Widerstandswerte des DMM bei DC-Strommessung lassen sich aus den Angaben
über den maximalen „Spannungsabfall“ abschätzen, indem diese Spannungen durch den
2.5 V
Strommessbereich geteilt werden. Für den Bereich 500 mA ergibt sich 0.5
A = 5 Ω und für
0.7 V
den Bereich 500 µA 0.5
=
1.4
kΩ.
mA
Der Widerstand eines Strommessgeräts nimmt allgemein umgekehrt proportional zum
gewählten Messbereich zu und kann durchaus Werte in der Grössenordnung kΩ annehmen.
Eine genauere Bestimmung dieser Widerstände, z. B. zur Korrektur von systematischen
Fehlern, muss durch Spannungsmessung am belasteten A-Meter erfolgen.
• Die Bezeichnung „4 34 -Digit“ des DMM ist hier so zu verstehen, dass die Anzeige 5 Ziffern
aufweist und dass die erste Ziffer maximal eine 5 darstellen kann. Es gibt Messgeräte mit
n 21 -stelliger Anzeige. Damit ist gemeint, dass n + 1 Ziffern für die Anzeige der Messergebnisse vorhanden sind und die erste Ziffer maximal eine 2 sein kann.
40
HM8012
4 3⁄4 - D i g i t p ro g r a m m i e r b a re s M u l t i m e t e r
HM8012
HZ15 (im Lieferumfang)
R 4¾-stellige Anzeige mit 50.000 Digit
R Grundgenauigkeit 0,05 %
R Max. Auflösung: 10 µV, 0,01 dBm, 10 nA, 10 mΩ, 0,1 °C
R Offsetfunktion/Relativwertmessung
WDM8012 Software
(im Lieferumfang)
Grundgerät HM8001-2
erforderlich
R RS-232 Schnittstelle und Software inklusive
Messspannung:
4¾-Digit programmierbares Multimeter HM8012
Alle Angaben bei 23 °C nach einer Aufwärmzeit von 30 Minuten.
Gleichspannung DC
Messbereiche:
Auflösung:
Genauigkeit:
5 V, 500 V, 600 V:
500 mV, 50 V:
Überlastschutz:
V/Ω/T°/dB/
gegen
COM u. gegen Gehäuse:
COM gegen Gehäuse:
Eingangsimpedanz:
50 V, 500 V, 600 V:
500 mV, 5 V:
Eingangsstrom:
Gleichtaktunterdrückung:
Serientaktunterdrückung:
dB Funktion
Genauigkeit:
Auflösung:
Gleichstrom DC
Messbereiche:
Auflösung:
Genauigkeit:
0,5…500 mA:
10 A:
Spannungsabfall:
10 A Bereich:
500 mA Bereich:
andere Bereiche:
Wechselspannung AC
Messbereiche:
Auflösung:
Genauigkeit 0,5…50 V:
40 Hz…5 kHz:
20 Hz…20 kHz:
Genauigkeit 500 V und 600 V:
40 Hz…1 kHz:
20 Hz…1 kHz:
Überlastschutz:
V/Ω/T°/dB/
gegen
COM u. gegen Gehäuse:
COM gegen Gehäuse:
Eingangsimpedanz:
AC Betrieb:
AC + DC Betrieb:
Bandbreite bei -3 dB:
dB Mode:
Genauigkeit:
-23,8…59,8 dBm:
Auflösung:
Gleichtaktunterdrückung:
Crestfaktor:
Wechselstrom AC
Messbereiche:
Auflösung:
Genauigkeit:
0,5…500 mA:
10 A:
500 mV, 5 V, 50 V, 500 V, 600 V
10 µV, 100 µV, 1 mV, 10 mV, 100 mV
±(0,05 % v. Messwert + 0,002 % v. Endwert)
±(0,05 % v. Messwert + 0,004 % v. Endwert)
850 VS bei max. 60 Hz oder 600 VDC
250 VEff bei max. 60 Hz oder 250 VDC
10 MΩ II 90 pF
>1 GΩ II 90 pF
10 pA
≥100 dB (50/60 Hz ±0,5 %)
≥60 dB (50/60 Hz ±0,5 %)
±(0,02 dB + 2 Digits) (Anzeige >-38,7 dBm)
0,01 dB oberhalb 18 % v. Bereich
500 µA, 5 mA, 50 mA, 500 mA, 10 A
10 nA, 100 nA, 1 µA, 10 µA, 1 mA
±(0,2 % v. Messwert + 0,004 % v. Endwert)
±(0,3 % v. Messwert + 0,004 % v. Endwert)
0,2 V max.
2,5 V max.
0,7 V max.
500 mV, 5 V, 50 V, 500 V, 600 V
10 µV, 100 µV, 1 mV, 10 mV, 100 mV
±(0,4 % v. Messwert + 0,07 % v. Endwert)
±(1 % v. Messwert + 0,07 % v. Endwert)
±(0,4 % v. Messwert + 0,07 % v. Endwert)
±(1 % v. Messwert + 0,07 % v. Endwert)
10 V typ. bei offenen Eingängen;
abhängig vom gemessenen Widerstandswert. Der negative Pol der Prüfspannung
liegt am COM-Eingang.
Temperatur
2-Draht Widerstandsmessung mit Linearisierung für Sensoren PT100
nach dem Standard EN60751
-200…+500 °C
Bereich:
0,1 °C
Auflösung:
ca. 1 mA
Mess-Strom:
in °C, °F
Anzeige:
±(0,4 °C +0,0005 x T) von -200…+200 °C
Genauigkeit:
±(0,5 °C +0,0005 x T) von +200…+500 °C
(T in °C, zuzügl. Sensor-Toleranz)
Temperatur-Koeffizient: (Referenz 23 °C)
V = 500 mV, 50 V
30 ppm/°C
600 V Bereich
80 ppm/°C
andere Bereiche
20 ppm/°C
V ~ 600 V Bereich
80 ppm/°C
andere Bereiche
50 ppm/°C
mA alle Bereiche
200 ppm/°C
mA~ alle Bereiche
300 ppm/°C
Ω
5 MΩ, 50 MΩ Bereiche 200 ppm/°C
andere Bereiche
50 ppm/°C
Verschiedenes
Stromversorgung (vom Grundgerät):
+5 V
300 mA
~26 V
140 mA
+5…+40 °C
Arbeitstemperatur:
-20…+70 °C
Lagertemperatur:
5…80 % (ohne Kondensation)
Rel. Luftfeuchtigkeit:
Abmessungen (B x H x T),
(ohne 22-pol. Flachstecker): 135 x 68 x 228 mm
ca. 0,5 kg
Gewicht:
Im Lieferumfang enthalten: Bedienungsanleitung, Schnittstellenkabel HZ14,
1 Satz Messkabel HZ15, Software CD
Empfohlenes Zubehör:
HZ10S 5 x Silikon-Messleitung (Schwarz)
HZ10R 5 x Silikon-Messleitung (Rot)
HZ10B 5 x Silikon-Messleitung (Blau)
HZ812 PT100 Temperatur-Messsonde
850 Vs bei max. 60 Hz oder 600 VDC
250 VEff bei max. 60 Hz oder 250 VDC
1 MΩ II 90 pF
10 MΩ II 90 pF
80 kHz typisch
20 Hz…20 kHz
±0,2 dBm
0,01 dB oberhalb 9 mV
≥60 dB (50/60 Hz ±0,5 %)
7 max.
500 µA, 5 mA, 50 mA, 500 mA, 10 A
10 nA, 100 nA, 1 µA, 10 µA, 1 mA
±(0,7 % v. Messwert + 0,07 % v.E.) 40 Hz…5 kHz
±(1 % v. Messwert + 0,07 % v. Endwert)
AC + DC Messungen
Wie bei AC + 25 Digits
Widerstand
500 Ω, 5 kΩ, 50 kΩ, 500 kΩ, 5 MΩ, 50 MΩ
Messbereiche:
10 mΩ, 100 mΩ, 1 Ω, 10 Ω, 100 Ω, 1 kΩ
Auflösung:
Genauigkeit:
500 Ω…500 kΩ:
±(0,05 % v. Messwert + 0,004 % v.E.+ 50 mΩ)
5…50 MΩ:
±(0,3 % v. Messwert + 0,004 % v. Endwert)
Eingang geschützt bis max. 300 VEff
500 Ω…5 kΩ Bereich: 1mA
Messstrom:
50 kΩ Bereich:
100 µA
500 kΩ Bereich:
10 µA
5…50 MΩ Bereich:
100 nA
HM8012D/121010 · C&E · Änderungen vorbehalten · © HAMEG Instruments GmbH® · DQS-zertifiziert nach DIN EN ISO 9001:2008, Reg. Nr.: 071040 QM08
HAMEG Instruments GmbH · Industriestr. 6 · D-63533 Mainhausen · Tel +49 (0) 6182 8000 · Fax +49 (0) 6182 800100 · www.hameg.com · [email protected]
G. Musterkalibrierschein
G. Musterkalibrierschein
Auf den folgenden Seiten findet der Leser einen kommentierten Musterkalibrierschein nach DIN
EN ISO/IEC 17025:2005 für ein Digital Voltmeter von Flucke.
43
MeßTechnikNord GmbH
MTN - Musterkalibrierschein
gemäß DIN EN ISO/IEC EN 17025:2005
Akkreditierte Labore für Kalibrierung und EMV
In diesem Musterkalibrierschein wird dargestellt, wie die Anforderungen an einen Kalibrierschein gemäß
DIN EN ISO/IEC 17025:2005 in einem MTN- Kalibrierschein umgesetzt werden. Die Anforderungen sind in dem
Kapitel 5.10 „Ereignisberichte“ der Norm festgelegt.
Seite 1: Deckblatt
Gerätedaten, Kundendaten, Ort der Kalibrierung mit Umweltbedingungen, Gesamtergebnis, Verantwortlichkeiten
5.10.2 c)
Eindeutige Kennzeichnung auf
jeder Seite. Auf erster Seite nur
Kalibrierschein- Nr.
5.10.2 a) / 5.10.4.3
Titel des Kalibrierscheins.
Falls der Kalibrierschein
Messwerte vor einem Abgleich
enthält, wird es hier
angegeben.
5.10.2 f) / 5.10.9
Eindeutiger Name, unter dem
das Dokument als PDF- Datei
archiviert wird. Änderungen an
dem Dokument sind nicht
möglich.
(Messwerte vor Abgleich)
Wird hier angegeben, wenn notwendig
5.10.2 f)
Kalibriergegenstand
5.10.2 e)
Kalibrierverfahren, verwendete
Kalibrierprozedur mit Rev.
5.10.2 d)
Kunde (Auftraggeber)
Musterfirma
5.10.2 g)
Datum der Kalibrierung
5.10.2 b)
Ort der Kalibrierung
5.10.4.1 a)
Umweltbedingungen
5.10.4.3
Aussage über die Einhaltung
der Spezifikationen
(Konformität) und ob eine
Abgleich durchgeführt wurde.
5.10.9
Gültigkeit des Kalibrierscheins.
Der Kalibrierschein ist nur mit
Unterschrift oder digitaler
Signatur gültig.
5.10.5 j)
Verantwortliche Personen mit
Funktion für diesen
Kalibrierschein.
5.10.4.2
Aussage und Erklärung zur
Konformität der
Messergebnisse.
Stand 07/2008
MeßTechnikNord GmbH
MTN - Musterkalibrierschein
gemäß DIN EN ISO/IEC EN 17025:2005
Akkreditierte Labore für Kalibrierung und EMV
Seite 2: Beschreibung und Messwerte
Gemessene Werte (Messwerte, Toleranzen, Abweichungen, Messunsicherheiten usw.)
5.10.2 c)
Eindeutige Kennzeichnung auf
jeder Seite:
Kalibrierschein- Nr.
Seiten- Nr.,
Datum der Kalibrierung
5.10.2 f)
Kalibriergegenstand,
u. U. Ausführliche Beschreibung,
wenn kein Standartinstrument.
5.10.2 e)
Kalibrierverfahren in allgemeiner
Form oder mit Angabe der Norm
(Siehe auch Seite 1
Kalibriervorschrift).
5.10.2 i)
Messergebnisse,
Alle ermittelten Werte mit
Herstellertoleranzen,
Abweichungen und erweiterten
Messunsicherheiten. Alle
Zahlenwerte mit Angabe der
Einheit (Siehe auch Beschreibung
auf der ersten Seite).
5.10.4.2
Aussage zur Konformität.
Aus der Toleranz des Herstellers
für einen Messwert und der
erweiterten Messunsicherheit für
diesen Wert wird ein Bereich
errechnet, für den eine
Konformitätsaussage gemacht
werden kann (0 -100% Konf.
Bereich).
Bei einer Überschreitung der
100% Grenze ist eine
Konformitätsaussage über die
Einhaltung der Toleranz nicht
möglich und der Wert wird mit
einem „<“ gekennzeichnet.
Werte bei denen eine Verknüpfung
der Toleranz und der Messunsicherheit nicht möglich ist,
werden mit einem „.“ (Punkt)
gekennzeichnet, auch hier ist eine
Konformitätsaussage nur in
Einzelfällen möglich
(Siehe auch die Beschreibung auf
der ersten Seite).
5.10.4.1 b)
Erweiterte Messunsicherheit nach
DKD-3, in der Auflösung und der
Einheit des „richtigen Wertes“
(Siehe auch die Beschreibung auf
der ersten Seite).
Stand 07/2008
MeßTechnikNord GmbH
MTN - Musterkalibrierschein
gemäß DIN EN ISO/IEC EN 17025:2005
Akkreditierte Labore für Kalibrierung und EMV
Seite 3: Messwerte und Ende des Kalibrierscheins
Gemessene Werte und Angabe der verwendeten Normale
5.10.2 c)
Eindeutige Kennzeichnung auf
jeder Seite:
Kalibrierschein- Nr.
Seite- Nr.
Datum der Kalibrierung
5.10.4.1 c)
Messtechnische Rückführung.
Auflistung der zur Kalibrierung
verwendete Normale mit der
Identifikation- Nr., der
Kalibrierschein- Nr. und der
Angabe der letzten und der
nächsten Kalibrierung.
5.10.8
Erklärung zu den verwendeten
Begriffen im Kalibrierschein, zum
besseren Verständnis und der
Lesbarkeit des Kalibrierscheins.
Stand 07/2008
H. Datenblatt Platin-Temperatursensor Heraeus M422
H. Datenblatt Platin-Temperatursensor Heraeus M422
47
Platinum Resistance Temperature Detector
M 422
M series PRTDs are especially robust and are designed for large volume applications where long term stability,
interchangeability and accuracy over a large temperature range are vital. Typical applications are Automotive, White
Goods, HVAC, Energy Management, Medical and Industrial Equipment.
Nominal
Resistance R0
100 Ohm at 0°C
500 Ohm at 0°C
1000 Ohm at 0°C
Tolerance
DIN EN 60751
1996-07
Class 1/3 B
Class A
Class B
Class 1/3 B
Class A
Class B
Class 1/3 B
Class A
Class B
Tolerance
DIN EN 60751
2009-05
F 0.1
F 0.15
F 0.3
F 0.1
F 0.15
F 0.3
F 0.1
F 0.15
F 0.3
Order Number
Plastic Bag
Order Number
Blister reel
32 208 500
32 208 498
32 208 392
32 208 502
32 208 501
32 208 414
32 208 537
32 208 503
32 208 499
32 208 522
32 208 521
32 208 520
32 208 525
32 208 524
32 208 523
32 208 527
32 208 526
The measuring point for the nominal resistance is defined at 8mm from the end of the sensor body.
Specification
DIN EN 60751 (according to IEC 751)
Temperature range
-70°C to +500°C (continuous operation)
(temporary use to 550°C possible)
Tolerance Class B:
-70°C to +500°C
Tolerance Class A:
-50°C to +300°C
Tolerance Class 1/3 B:
0°C to +150°C
Temperature coefficient
TC = 3850 ppm/K ; 3750 ppm/K available
on request
Leads
Pt clad Ni- wire
Recommend connection technology:
Welding, Crimping and Brazing
Lead lengths (L)
10mm ±1mm
Longterm stability
max. R0-drift 0.04% after 1000 h at 500 °C
Vibration resistance
at least 40g acceleration at 10 to 2000 Hz,
depends on installation
Shock resistance
at least 100g acceleration with 8ms half sine
wave, depends on installation
Environmental conditions
unhoused for dry environments only
Insulation resistance
> 100 M at 20°C; > 2 M at 500°C
Self heating
0.3 K/mW at 0°C
Response time
water current (v= 0.4m/s):
air stream (v= 2m/s):
t0.5 = 0.07s
t0.9 = 0.20s
t0.5 = 3.2s
t0.9 = 11s
Measuring current
100: 0.3 to 1.0mA
500: 0.1 to 0.7mA
1000: 0.1 to 0.3mA
(self heating has to be considered)
Note
Other tolerances, values of resistance and wire lengths are
available on request.
We reserve the right to make alterations and technical data printed. All technical data serves as a guideline and does not guarantee
particular properties to any products.
Heraeus Sensor Technology GmbH, Reinhard- Heraeus- Ring 23, 63801 Kleinostheim, Germany
Phone: +49 (0) 6181/35-8098, Fax: +49 (0)6181/35-8101, E-Mail: [email protected] Web: www.heraeus-sensor-technology.com
Name of document: 30910021 Index B
Status: 06/2010
I. Datenblatt NTC-Temperatursensor EPCOS B57164 K0331
I. Datenblatt NTC-Temperatursensor EPCOS B57164 K0331
49
Temperature measurement
B57164
Leaded NTCs, lead spacing 5 mm
K164
B57164K0331K000
R/T No.
T (°C)
1306
B25/100 = 3450 K, R25 = 330 Ω, TR = 25 °C, ∆RR/RR = ± 10%
Rnom[Ω]
Rmin[Ω]
Rmax[Ω]
∆RR/RR[±%] ∆T[±°C]
α (%/K)
55.0
50.0
45.0
40.0
35.0
16479
12091
8969
6722
5087
12725
9465
7113
5396
4131
20232
14717
10826
8048
6044
22.8
21.7
20.7
19.7
18.8
3.6
3.6
3.5
3.5
3.4
6.3
6.1
5.9
5.7
5.5
30.0
25.0
20.0
15.0
10.0
3886
2993
2326
1821
1437
3190
2483
1949
1540
1227
4581
3503
2704
2102
1648
17.9
17.0
16.2
15.4
14.7
3.4
3.3
3.3
3.2
3.1
5.3
5.1
5.0
4.8
4.7
5.0
0.0
5.0
10.0
15.0
1142
914.3
736.4
597.2
487.1
983.0
793.3
644.0
526.2
432.3
1301
1035
828.8
668.2
542.0
13.9
13.2
12.5
11.9
11.3
3.1
3.0
2.9
2.9
2.8
4.5
4.4
4.3
4.1
4.0
20.0
25.0
30.0
35.0
40.0
399.8
330.0
273.8
228.4
191.5
357.3
297.0
244.8
202.9
169.1
442.4
363.0
302.9
254.0
214.0
10.6
10.0
10.6
11.2
11.7
2.7
2.6
2.9
3.1
3.4
3.9
3.8
3.7
3.6
3.5
45.0
50.0
55.0
60.0
65.0
161.4
136.6
116.1
99.20
85.07
141.6
119.2
100.8
85.61
73.03
181.1
154.0
131.5
112.8
97.12
12.2
12.7
13.2
13.7
14.2
3.6
3.9
4.1
4.4
4.7
3.4
3.3
3.2
3.1
3.0
70.0
75.0
80.0
85.0
90.0
73.25
63.32
54.94
47.84
41.81
62.55
53.80
46.45
40.25
35.01
83.95
72.84
63.43
55.44
48.61
14.6
15.0
15.5
15.9
16.3
4.9
5.2
5.5
5.8
6.1
3.0
2.9
2.8
2.7
2.7
95.0
100.0
105.0
110.0
115.0
36.66
32.25
28.46
25.19
22.36
30.56
26.76
23.51
20.72
18.31
42.76
37.74
33.41
29.66
26.41
16.7
17.0
17.4
17.8
18.1
6.4
6.7
7.0
7.4
7.7
2.6
2.5
2.5
2.4
2.4
120.0
125.0
19.91
17.77
16.24
14.44
23.58
21.11
18.4
18.8
8.0
8.4
2.3
2.2
Please read Important notes and
Cautions and warnings at the end of this document.
Page 22 of 61
Literatur
Literatur
[1] Wikipedia: Measurement Uncertainty
http://en.wikipedia.org/wiki/Measurement_uncertainty
[2] Buro International des Poids et Mesures: Guide to the Expression of Uncertainty in
Measurement (GUM)
http://www.bipm.org/en/publications/guides/gum.html
[3] Metrodata GmbH: Datenverarbeitung für Messtechnik und Qualitätssicherung, Berichte
und Veröffentlichungen
http://www.metrodata.de/papers.html
[4] Martin Bantel: Grundlagen der Messtechnik, Messunsicherheit von Messung und Messgerät, Fachbuchverlag Leipzig (2000)
51