Eigenschaften realer Bauelemente
Werbung

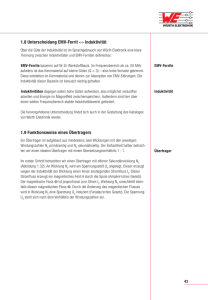
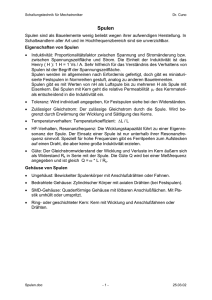
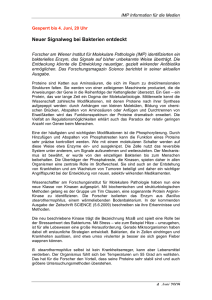
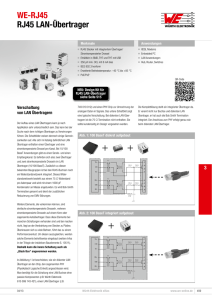
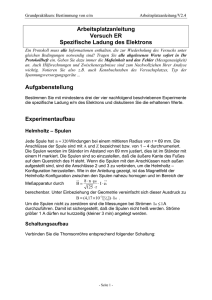
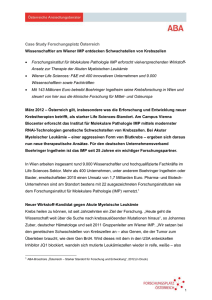
Eigenschaften realer Bauelemente Martin Schlup 31. August 2014 In diesem Skript werden die wesentlichen Eigenschaften realer, d. h. nicht idealer, elektrischer Komponenten wie Widerstände, Kondensatoren und Spulen kurz angesprochen. Dabei werden auch magnetisch gekoppelte Spulen wie Transformatoren und Übertrager behandelt. Der Schwerpunkt der Betrachtungen wird auf die lineare Modellierung dieser Komponenten gelegt, so dass ihr reales Verhalten bei Wechselstrom oder allgemeiner in einem bestimmten Frequenzband nachgebildet werden kann. Nichtlinearitäten werden hier nicht behandelt, auch wenn sie in der Praxis eine nicht unwesentliche Rolle spielen. Weitere, wesentlich ausführlichere Information zum Thema reale Komponenten ist in der Literatur wie z. B. in [2, Kapitel 8 Reale Bauelemente] und [4, Kapitel 2 Passive Bauelemente] zu finden. Inhaltsverzeichnis 1. Widerstände 1.1. Widerstandstypen . . . . . . 1.2. Eigenschaften . . . . . . . . . 1.2.1. Temperatureinfluss . . 1.2.2. Frequenzabhängigkeit 2. Kondensatoren 2.1. Kondensatortypen . . . . . . 2.2. Eigenschaften . . . . . . . . . 2.2.1. Temperatureinfluss . . 2.2.2. Isolationswiderstand . 2.2.3. Frequenzabhängigkeit 3. Spulen 3.1. Realisierung . . . . . . . . . . 3.2. Eigenschaften . . . . . . . . . 3.2.1. Wirkverluste . . . . . 3.2.2. Frequenzabhängigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 4 4 5 . . . . . 8 8 8 8 9 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 12 12 12 14 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren 4.1. Übertrager . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1.1. Idealer Übertrager . . . . . . . . . . . . . . . . . . . . . . 4.1.2. Ideal festgekoppelter Übertrager . . . . . . . . . . . . . . 4.1.3. Verlustloser Übertrager . . . . . . . . . . . . . . . . . . . 4.2. Transformator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.1. Linearisiertes Transformatormodell . . . . . . . . . . . . . 4.2.2. Messtechnische Bestimmung der Transformatorparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 17 17 20 21 23 23 24 . . . . . . . . . . . . . . . . . . . . A. Frequenzverhalten von Drahtwiderständen 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 1. Widerstände In diesem Kapitel sollen nur Widerstände betrachtet werden, welche in ihrer Anwendung lineares Verhalten und im Idealfall einen von der Frequenz und der Stromstärke unabhängigen Widerstandswert aufweisen sollten, d. h. Thermistoren (NTC, PTC) und Varistoren (VDR, ZNR) werden hier nicht behandelt. 1.1. Widerstandstypen Widerstände werden grob durch die Angabe der folgenden Grössen spezifiziert: • Nennwiderstand (Nennwertreihe nach DIN 41426, Farbstreifencode nach DIN JEC 62) • Belastbarkeit (max. Dauerleistung oder -spannung, Wärmewiderstand Rth in Kelvin/Watt, cf. 1.2.1 Gleichung (1.1) • Temperaturabhängigkeit (Temperaturkoeffizient α0 bezogen auf die Temperatur θ0 , cf. 1.2.1 Gleichung (1.2) ) • Frequenzabhängigkeit (linearisiertes Ersatzschaltbild) • Widerstandsrauschen (thermisches Rauschen) Im Wesentlichen gibt es zwei grundlegende Realisierungsformen, welche ihren Einsatz in der Praxis bestimmen (cf. z. B. [4, Bild 2.9, S. 96]): • Drahtwiderstände mit niedrigen Widerstandswerten, für mittlere bis sehr grosse Nennleistungen aber eher niedrige Frequenzen (bifilare oder Chaperon-Wicklung zur Reduzierung der Eigeninduktivität) • Schichtwiderstände kleine bis grosse Nennleistungen, hohe Frequenzen (Kohleschicht, Metallschicht) 1.2. Eigenschaften 1.2.1. Temperatureinfluss Die Belastbarkeit, bzw. die maximale Leistung Pmax hängt von der Differenz zwischen der Widerstandsoberflächen- θob und der Umgebungstemperatur θum wie folgt ab: Pmax = θob − θum Rth 4 (1.1) 1. Widerstände Bei Belastung verändert sich die Widerstandstemperatur im Allgemeinen, so das auch der Widerstandswert sich je nach Temperaturkoeffizient1 verändern kann: R(θ) = R0 1 + α0 · (θ − θ0 ) (1.2) Die relative Widerstandsänderung beträgt folglich ∆R(θ) R(θ) − R0 = = α0 · (θ − θ0 ) = α0 · ∆θ R0 R0 1.2.2. Frequenzabhängigkeit Wechselstrommodelle Je nach Art der Realisierung und Widerstandswert können sich Widerstände mehr oder weniger frequenzunabhängig verhalten aber auch mit zunehmender Frequenz induktiv oder kapazitiv werden. Typisch für Drahtwiderstände ist das induktive Verhalten bei zunehmenden Frequenzen. Dies ist auf die Drahtwicklung zurückzuführen, welche sich elektrisch wie eine Spule verhält. Aber auch Kapazitäten zwischen den Windungen können bei höheren Frequenzen ein kapazitives Verhalten hervorrufen (cf. Anhang A). Entsprechend dem Verhalten müssen passende Modelle ausgewählt werden: Abbildung 1.1.: Einfache Widerstandsmodelle links: überwiegend induktiv, Mitte: überwiegend kapazitiv, rechts: Mischform Unterhalb der Grenz(kreis)frequenz verhält sich der Widerstand wie erwartet, oberhalb induktiv oder kapazitiv, je nach Bauart. Bei dieser Frequenz ist der Phasenwinkel zwischen Spannung und Strom ϕ(ωg ) = ϕu − ϕi = ±π/4 (Vorzeichen je nach Modell). Für die Modelle in der Abb. 1.1, links und Mitte gilt für diese Grenze: ωg = ωg = R L 1 RC Skin-Effekt In Leitern, insbesondere bei Drahtwiderständen und Leitungen, macht sich bei zunehmender Frequenz der sogenannte Stromverdrängungseffekt oder Skineffekt 2 bemerkbar. Die zeitliche Änderung der Stromdichte erzeugt im leitenden Material nach den Induktionsgesetz und der 1 2 Ein positiver Temperaturkoeffizient führt zu einer Erhöhung des Widerstandswerts gegenüber dem Wert R0 bei der Bezugstemperatur θ0 . skin: Haut 5 1. Widerstände Regel von Lenz Wirbelströme. Diese überlagern sich dem Leitungsstrom so, dass der resultierende Strom gegen die Leiteroberfläche verdrängt wird. Dadurch verringert sich der benutzte Leiterquerschnitt und der Leiterwiderstand nimmt dabei scheinbar zu. In einem kreiszylindrischen Leiter nimmt die Amplitude der resultierenden Stromdichte mit zunehmender Leitertiefe exponentiell ab3 : ĵ(r) = ĵ0 · e− Legende: r0 r ĵ0 ĵ(r) r0 −r δ Radius des zylinderförmigen Leiters Abstand von der Leiterachse, 0 ≤ r ≤ r0 Amplitude der Wechselstromdichte an der Leiteroberfläche, d. h. bei r = r0 Amplitude der Wechselstromdichte im Abstand r der Leiterachse Die Grösse δ ist dabei die Eindringtiefe (attenuation distance). Sie hängt von der Leitfähigkeit γ und der Permeabilität µ = µr µ0 des Materials, sowie von der Kreisfrequenz ω des Wechselstroms ab. Für einen metallischen Leiter (r = 1) gilt für Frequenzen unterhalb 10 GHz: r 2 δ= (1.3) γ µω Die Eindringtiefe nimmt im wesentlichen mit der Frequenz ab. Für hohe Frequenzen fliesst der gesamte Strom in einer hauchdünnen Schicht auf der Leiteroberfläche: Ein isolierender Kunststoffkern mit einer aufgedampften Silberschicht kann den gleichen Strom führen wie ein massiver Silberdraht! Für Kupfer z. B. ergeben sich die Werte der Tabelle 1.1 für die Eindringtiefe in Funktion der Frequenz. Für Leiter mit relativ grossem Durchmesser ist der Effekt schon bei 50 Hz beobachtbar. Tabelle 1.1.: Skineffekt: Eindringtiefe für Kupfer in Funktion der Frequenz Stromnetz lange kurze Mikrowellen Radiowellen Radiowellen Frequenz 50 Hz 500 kHz 100 MHz 10 GHz −3 δ in mm (ca.) 10 0.1 5 · 10 0.5 · 10−3 Um den Effekt zu reduzieren, ist es offensichtlich günstiger ein Bündel von gegeneinander isolierten Drähten mit kleinen Durchmessern (Litze) als einen einzelnen Draht mit äquivalenter Querschnittfläche zu benutzen, cf. Abb. 1.2. 3 Annahme: r0 > 5 δ 6 1. Widerstände Abbildung 1.2.: Widerstandszunahme eines Kupferdrahts infolge Skineffekt für Frequenzen unterhalb 1 MHz Der Einfluss macht sich in Funktion der Frequenz aber auch des Drahtdurchmessers bemerkbar. Der Effekt ist vernachlässigbar bei Drahtdurchmessern welche kleiner als die Eindringtiefe sind. 7 2. Kondensatoren In diesem Kapitel sollen nur Kondensatoren näher betrachtet werden, welche in ihrer Anwendung lineares Verhalten und im Idealfall eine von der Spannung unabhängige Kapazität aufweisen sollten. Es ist dabei klar, dass bei weitem nicht alle Kondensatoren diese ideale Eigenschaften aufweisen. Dadurch muss für die Wahl eines bestimmten Kondensatortyps noch wesentlich sogfältiger an die Anwendung angepasst als bei Widerständen vorgegangen werden. 2.1. Kondensatortypen Kondensatoren werden grob durch die Angabe der folgenden Grössen spezifiziert: • Nennkapazität • Belastbarkeit (max. Spannung) • Temperaturabhängigkeit (Temperaturkoeffizient α0 bezogen auf die Temperatur θ0 , cf. 2.2.1) • Frequenzabhängigkeit (linearisiertes Ersatzschaltbild) • Linearität (Abhängigkeit der Kapazität von der Spannung) Es gibt verschiedene grundlegende Realisierungsformen, welche ihren Einsatz in der Praxis bestimmen (cf. z. B. [4, Bild 2.28, S. 110]) • Metall- und Dielektrikumfolie (K, MP, MK) • Elektrolytkondensatoren (Aluminium, Tantal) • Keramikkondensatoren (NDK, HDK) • Superkondensatoren (Doppelschichtkondensatoren, Pseudokondensatoren), cf. http://de. wikipedia.org/wiki/Superkondensator 2.2. Eigenschaften 2.2.1. Temperatureinfluss Mit der Temperatur verändert sich im Allgemeinen auch die Kapazität: C(θ) = C0 1 + α0 · (θ − θ0 ) Die relative Kapazitätsänderung beträgt folglich ∆C(θ) C(θ) − C0 = = α0 · (θ − θ0 ) = α0 · ∆θ C0 C0 Der Temperaturkoeffizient α0 kann dabei positiv oder negativ sein. 8 2. Kondensatoren 2.2.2. Isolationswiderstand Ein geladener Kondensator der Kapazität C wird sich auf Grund seines endlichen Isolationswiderstands RIs mit der Zeit entladen, auch wenn seine Klemmen nicht elektrisch verbunden sind. Die Zeitkonstante τ der Selbstentladung beträgt bei homogenem Dielektrikum mit Permittivität und Leitfähigkeit γ: τ = RIs C = γ Die Selbstentladung ist also unabhängig von Form und Grösse des Kondensators. Sie hängt nur von den elektrischen Eigenschaften des Dielektrikums ab. Typische Werte für τ sind einige tausend Sekunden je nach Material und Bauart. 2.2.3. Frequenzabhängigkeit Idealerweise sollte die Impedanz eines Kondensators über den ganzen Frequenzbereich einen Amplitudengang mit einer konstanten, negativen Steigung von −20 dB/Dk aufweisen. Der Entsprechende Phasengang sollte dabei, frequenzunabhängig, ϕ(ω) = −π/2 betragen. Dies ist natürlich nicht so bei realen Kondensatoren, bedingt schon durch ihren, praktisch immer vorhandenen Isolationswiderstand. Darüber hinaus hat z. B. die Impedanz von Al-ElektrolytKondensatoren einen minimalen Wert (Resonanzfrequenz), welcher zwischen 10 kHz und einigen 100 kHz liegen kann. Oberhalb dieser Frequenz verhält sich der Kondensator induktiv1 ! Wechselstrommodell Ganz allgemein, d.h. unabhängig vom Frequenzgang, lassen sich für eine feste Frequenz die folgenden Grössen für das Wechselstrommodell eines Kondensators definieren: komplexer Ersatzleitwert komplexer Ersatzwiderstand Y (ω) = Y (ω) h−ϕ(ω) = G(ω) + j B(ω) Z(ω) = Z(ω) hϕ(ω) = R(ω) + j X(ω) Gütefaktor (Definition) 1 QC = (Interpretation) QC maximale im Kond. gespeicherte Energie Ŵ mittlere Verlustenergie in einer Periode WV Verlustfaktor (Definition) d Verlustwinkel (Definition) δ B −X −Q = = G R P (2.1) 2π Ŵ mit WV Û 2 B −Q =C = CU 2 = U 2 = 2 ω ω P 2π =PT =P = ω f = 1 G = QC B mit tan(δ) = d = Dies ist aber nicht weiter problematisch, da ja Elektrolyt-Kondensatoren meistens bei festen und tiefen Frequenzen eingesetzt werden. 9 2. Kondensatoren Achtung • Die Grössen QC , d und δ sind frequenzabhängig. Es muss also immer angegeben werden, bei welcher Frequenz sie gelten! • Der Gütefaktor QC darf nicht mit der (negativen) Bildleistung Q des Kondensators verwechselt werden. Das physikalische Frequenzverhalten eines Kondensators kann für relativ tiefe Frequenzen durch das folgende lineare Modell dargestellt werden: Abbildung 2.1.: Einfaches Kondensatormodell für relativ tiefe Frequenzen Die Kapazität C entspricht dem Nennwert, der Widerstand RIs dem Isolationswiderstand des Kondensators. Oberhalb der Grenz(kreis)frequenz verhält sich der Kondensator wie erwartet, unterhalb wirkt er resitiv. Bei dieser Frequenz ist der Phasenwinkel zwischen Spannung und Strom ϕ(ωg ) = ϕu − ϕi = −π/4. Für das Modell in der Abb. 2.1, gilt für diese Grenze: ωg = 1 RIs C Ersatzzweipol Bei einer festen Frequenz kann das Parallemodell gemäss Abb. 2.1 durch ein äquivalentes Seriemodell ersetzt werden. Diese Umrechnung ist gelegentlich von praktischer Bedeutung, um formale Berechnungen anzustellen. Abbildung 2.2.: Äquivalente Kondensatormodelle bei gegebener Frequenz Die beiden Modelle haben zwei verschiedene Frequenzgänge! Letztere sind nur deckungsgleich bei der betrachteten Umrechnungsfrequenz oder in ihrer nächsten Umgebung. Die entsprechenden Umrechnungsformeln sind (die Frequenzinformation steckt im Güte- bzw. Verlustfaktor): CS = 1 + Q2C CP = (1 + d2 ) CP Q2C RS = 1 d2 RP = RP 2 1 + d2 1 + QC 10 2. Kondensatoren Bemerkungen • Auf Grund der Definition (2.1) erhält man folgenden Zusammenhang für den Gütefaktor: QC = ω RP CP = 1 ω RS CS • Falls QC 1 ist CS ≈ CP und RS ≈ RP /Q2C . Dielektrische Nachwirkung Die Messung des Lade- und Entladevorgangs von Kondensatoren bei längeren Ladezeiten zeigt nicht das erwartete Verhalten. Beim Aufladen nähern sich Spannung und Stromstärke langsamer ihrem Endwert und der Spannungsendwert liegt tiefer als erwartet; ähnlich beim Entladen2 . Man bezeichnet diese Erscheinung bei der Aufladung als Nachladung und bei der Entladung als Rückstandsbildung. Sie wird im wesentlichen auf Nichthomogenitäten des Verhältnisses /γ innerhalb des Dielektrikums zurückgeführt. Im stationären Zustand (der durch das Strömungsfeld dargestellt wird) ist die Potentialverteilung im Kondensator durch die Leitfähigkeit γ des Dielektrikums bestimmt. Bei Beginn des Lade- oder Entladevorgangs bestimmt aber die Verschiebungstromdichte die Potentialverteilung. Letztere hängt von der Permittivität ab (siehe z. B.: [5]). Die dielektrische Nachwirkung wird im folgenden Hochfrequenz-Kondensatormodell durch die Kapazität CD und den Widerstand RD nachgebildet: Abbildung 2.3.: Kondensatormodell zur Nachbildung der dielektrischen Nachwirkung Die Elemente RA und LA beschreiben den Einfluss der Anschlüsse. Die Induktivität LA und der Widerstand RA sind durch die Anschlüsse bedingt. Beispiel: Folien-Kondensator der Kapazität C = 10 nF typische Werte: RIs = 1011 Ω, CD = 1 nF ≈ C/10, RD = 1010 Ω ≈ RIs /10, RA = 10 Ω, LA = 10 µH Die Zeitkonstante τentl ≈ C RA = 10−7 s für das Entladen des Kondensators durch Kurzschliessen der Klemmen ist hier 108 mal kleiner als die des Dielektrikums τD ≈ RD CD = 10 s. Ende Beispiel3 2 3 Dieser Effekt ist vor allem störend, wenn der Kondensator „schnell“ entladen werden muss, wie z. B. beim Reset eines aktiven Integrators mit OP-Amp. In diesem Beispiel liegen zwei Zeitkonstanten um den Faktor 108 auseinander. Dies führt bei der numerischen Modellierung des Systems zu unerwarteten Effekten, wenn gewöhnliche Integrationsalgorithmen benutzt werden (Stichwort: stiff systems). 11 3. Spulen Es werden hier nur Spulenmodelle näher betrachtet, welche in ihrer Anwendung lineares Verhalten und im Idealfall eine von der Stromstärke unabhängige Induktivität aufweisen. Es ist dabei klar, dass die meisten Spulen wegen ihres ferromagnetischen Kerns diese ideale Eigenschaften nicht aufweisen. 3.1. Realisierung Die Induktivität von Spulen wird üblicherweise durch Drahtwicklungen um einen ferromagnetischen Kern (Weicheisen oder Ferrite) erhalten. Da der Draht immer einen Widerstand aufweist, können Spulen grosser Güte nicht realisiert werden1 . Dazu kommt die Abhängigkeit der Induktivität von der Stromstärke, welche durch das nichtlineare magnetische Verhalten des Kerns verursacht wird. Eine mehr oder weniger gute Linearisierung des Verhaltens wird auf Kosten der Grösse der Induktivität mit einem Luftspalt im magnetischen Kreis (Kern mit Luftspalt) erreicht. Für hochpermeable Kerne (Ferrit-Schalenkerne) geben die Hersteller empirisch bestimmte Induktivitätsfaktoren AL an, die von der Luftspaltlänge abhängig sind. Damit kann die Induktivität aus der Spulenwindungszahl N (oder umgekehrt) bestimmt werden L ≈ AL N 2 Der Induktivitätsfaktor entspricht dem mittleren magnetischen Leitwert des Kerns. Je grösser der Luftspalt, desto kleiner wird der Induktivitätsfaktor. Dadurch wird die Linearität (magnetischer Fluss proportional zur Stromstärke) auf Kosten der Induktivität verbessert. Bemerkung: Das Messen der Induktivität mit einem RLC-Meter ist im Allgemeinen sinnlos, da infolge der Nichtlinearitäten das Ergebnis stark von der Stromstärke und der Frequenz abhängt. 3.2. Eigenschaften 3.2.1. Wirkverluste In einer Spule mit ferromagnetischem Kern treten Wirkverluste auf, die pauschal mit einem Leistungsmessgerät erfasst werden können. Diese Verluste bestehen aus folgenden Teilen: Kupferverluste Diese sind die dissipativen Verluste im Draht infolge des Stroms. Sie können durch Messen des Drahtwiderstandes R (gleichstrommässig) und des Effektivwertes I des Spulenstromes problemlos erfasst werden: PCu = R I 2 1 In Gegensatz zu Kondensatoren, welche mit hoher Güte realisiert werden können. 12 3. Spulen Bemerkung: Damit der Effektivwert der Stromstärke korrekt erfasst wird, muss ein TrueRMS-Messgerät benutzt werden. Dies ist auch bei harmonischer Anregung notwendig, da durch die Nichtlinearität des Magnetkerns der Stromverlauf im Allgemeinen stark verzerrt wird. Kern- oder „Eisen“-Verluste Diese entstehen im Material des ferromagnetischen Kerns und bestehen aus drei verschiedenen Ursachen: Wirbelstromverluste Diese sind verursacht durch die im Kernmaterial fliessenden Wirbelströme. Dadurch wird das Kernmaterial erwärmt. Sie nehmen proportional zur Frequenz im Quadrat zu: PW ∝ f 2 Sie können messtechnisch nicht direkt erfasst werden. Wirbelstromverluste treten bei Ferritkernen praktisch nicht auf, da diese sehr schlecht leiten. Um diese Verluste bei Eisenkernen gering zu halten, werden letztere quer zur Ausbreitungsrichtung der Wirbelströme mit dünnen2 , gegeneinander isolierten Blechen gebildet (Elektroblech). Hystereseverluste Bei diesem dissipativen Vorgang wird Energie für das Ummagnetisieren der Elementarmagnete beim Umlaufen der Hystereseschleife gebunden. Diese Energie lässt sich aus der Hysteresefläche und dem Volumen VF e des Kernmaterials berechnen. Bei harmonischer Anregung werden die Elementarmagnete einmal pro Periodendauer ummagnetisiert. I WH = V F e H dB I PH = f W H = f V F e H dB Die Hystereseverluste sind also proportional zur Frequenz f und zur Fläche innerhalb H der Hysteresesschleife (hier durch H dB dargestellt). Verluste infolge Trägheit der Elementarmagnete Bei hohen Frequenzen (besonders bei Ferriten, Nachrichtentechnik) tritt zwischen den Feldgrössen B und H eine durch die Trägheit der Elementarmagnete bedingte Phasenverschiebung auf. Diese Verschiebung führt zu Wirkverlusten, da dadurch der Phasenwinkel zwischen dem Strom (i(t) ∝ H(t)) nicht mehr um π/2 gegenüber der induzierten Spannung verläuft (u(t) ∝ dB(t)/dt). Um dies zu berücksichtigen, wird (analog zur komplexen Wechselstromlehre) die Permeabilitätszahl als komplexe Grösse µr definiert3 : B = µ0 µ r H = µ H 2 3 Typische Blechdicke: 0.5 mm und 0.35 mm Bei gewissen Materialien, wie z. B. gewalztem Elektroblech, spielt die Kornorientierung eine weitere Rolle: Die Richtungen der Feldvektoren B und H stimmen nicht unbedingt überein, so dass die Permeabilität µ als Tensor (3 × 3-Matrix) angegeben werden muss. 13 3. Spulen Bei Netzfrequenz können durch Messung der Gesamtheit der Wirkverluste (P = PCu + PF e = PCu +PW +PH ), der Kupferverluste und aus der Kenntnis der Hysteresekurve die Wirbelstromverluste rechnerisch bestimmt werden. Deren Grössenordnung liegt typischerweise im Bereich der Kupfer- und der Hystereseverluste. Für Weicheisenkerne von Transformatoren, die im Allgemeinen aus geschichtetem Blech bestehen, wird die spezifische Verlustleistung (Eisenverlustleistung PF e pro kg „Eisen“ mF e bei einem Scheitelwert der Flussdichte von 1.5 T und 50 Hz) angegeben: p1.5/50 = PF e mF e 3.2.2. Frequenzabhängigkeit Idealerweise sollte die Impedanz einer Spule über den ganzen Frequenzbereich einen Amplitudengang mit einer konstanten, positiven Steigung von 20 dB/Dk aufweisen. Der Entsprechende Phasengang sollte dabei, frequenzunabhängig, ϕ(ω) = π/2 betragen. Dies ist natürlich nicht so bei realen Spulen, bedingt schon durch ihren, praktisch immer vorhandenen Wicklungswiderstand. Wechselstrommodell Ganz allgemein, d. h. unabhängig vom Frequenzgang, lassen sich für eine feste Frequenz die folgenden Grössen für das linearisiertes Wechselstrommodell einer Spule definieren: komplexer Ersatzwiderstand komplexer Ersatzleitwert Z(ω) = Z(ω) hϕ(ω) = R(ω) + j X(ω) Y (ω) = Y (ω) h−ϕ(ω) = G(ω) + j B(ω) Gütefaktor (Definition) QL = (Interpretation) QL maximale im Kond. gespeicherte Energie Ŵ mittlere Verlustenergie in einer Periode WV Verlustfaktor (Definition) d Verlustwinkel (Definition) δ 14 X −B Q = = R G P 2π Ŵ mit WV Iˆ2 X Q = L = LI 2 = I 2 = 2 ω ω 2π P = =PT =P ω f = 1 R = QL X mit tan(δ) = d = (3.1) 3. Spulen Achtung • Die Grössen QL , d und δ sind frequenzabhängig. Es muss also immer angegeben werden, bei welcher Frequenz sie gelten! • Der Gütefaktor QL darf nicht mit der (negativen) Bildleistung Q verwechselt werden. Das physikalische Frequenzverhalten einer Spule kann für relativ tiefe Frequenzen durch folgende lineare Modelle dargestellt werden: Abbildung 3.1.: Einfaches Spulenmodell für relativ tiefe Frequenzen (links) und für höhere Frequenzen (rechts) Die Induktivität L entspricht dem Nennwert, der Widerstand RS dem Drahtwiderstand der Spulenwicklung. Bei höheren Frequenzen kann zudem die Kapazität zwischen den Windungen eine nicht vernachlässigbare Rolle spielen (Verschiebungsströme). Oberhalb der Grenz(kreis)frequenz verhält sich die Spule wie erwartet, unterhalb wirkt sie resitiv. Bei dieser Frequenz ist der Phasenwinkel zwischen Spannung und Strom ϕ(ωg ) = ϕu − ϕi = π/4. Für das Modell in der Abb. 3.1, gilt für diese Grenze: ωg = RS L Ersatzzweipol Bei einer festen Frequenz kann das Seriemodell gemäss Abb. 3.1 durch ein äquivalentes Parallelmodell ersetzt werden. Diese Umrechnung ist gelegentlich von praktischer Bedeutung, um formale Berechnungen anzustellen. Abbildung 3.2.: Äquivalente Spulenmodelle bei gegebener Frequenz Die beiden Modelle haben zwei verschiedene Frequenzgänge! Letztere sind nur deckungsgleich bei der betrachteten Umrechnungsfrequenz oder in ihrer nächsten Umgebung. 15 3. Spulen Die entsprechenden Umrechnungsformeln sind (die Frequenzinformation steckt im Güte- bzw. Verlustfaktor): LP = RP = 1 + Q2L LS = 1 + d2 LS 2 QL 1 + d2 1 + Q2L RS = RS d2 Bemerkungen • Auf Grund der Definition (3.1) erhält man folgenden Zusammenhang für den Gütefaktor: QL = RP ω LS = RS ω LP • Falls QL 1 ist LP ≈ LS und RP ≈ Q2L RS . 16 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Ein Übertrager (linear transformer) ist ein linearer Zweitor (Vierpol) der zur galvanisch getrennten Kopplung elektrischer Kreise oder zur Pegelanpassung des Ausgangssignals eines Kreises an das Eingangssignal des Folgekreises dienen soll. Die Signale sind dabei Spannungen oder Ströme. Die Übertragung soll für beliebige Signalformen möglichst verzerrungsfrei (lineares Verhalten) sein. Dies bedingt, dass das gewünschte Übertragungsverhalten für einen bestimmten Frequenzbereich (Bandbreite) erfüllt ist. Der Transformator ist eine besondere Art von Übertrager der primär zur Hoch-, bzw. Herunter-Transformation von Wechselspannungen dient. Er funktioniert demzufolge bei einer festen Frequenz. Im Allgemeinen werden damit hohe Leistungen übertragen. Die Linearität bei der Übertragung steht aber nicht im Vordergrund im Gegensatz zum Wirkungsgrad bei grösseren Leistungen. 4.1. Übertrager 4.1.1. Idealer Übertrager Der ideale Übertrager soll folgende Spannungs- und Stromübersetzungen aufweisen (ü12 ist das Übersetzungsverhältnis): u1 (t) u2 (t) i1 (t) −i2 (t) = ü12 = 1 ü12 Die Bezugsrichtungen für Spannungen und Ströme sind dabei für das Eingangs- und das Ausgangstor im Verbraucherpfeilsystem gewählt1 (Schaltbild siehe Abb. 4.1). Der Index 1 bezieht sich auf das Eingangs- und 2 auf das Ausgangstor. Für die Momentanleistungsbilanz ergibt sich: −i2 (t) p1 (t) = u1 (t) · i1 (t) = ü12 u2 (t) · = −p2 (t) ü12 Zu jedem Zeitpunkt ist die Momentanleistung am Ausgang gleich wie am Zweipoleingang. In Matrixschreibweise ergibt sich (mit der so genannten Kettenmatrix2 ) für Wechselstrom: ü12 0 U1 U2 = (4.1) 0 ü112 I1 −I 2 1 2 Das erklärt auch das negative Vorzeichen für i2 (t) Mit der Kettenmatrix werden die Eingangsgrössen des Zweipols durch seine Ausgangsgrössen beschrieben. 17 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Abbildung 4.1.: Schaltbild eines idealen Übertragers mit Bezugspfeilsystem Auf der linken Seite ist das Schema für beliebige Signalverläufe, rechts für Wechselstrom dargestellt. Die Kopplungspunkte sind hier angegeben, so dass mit den gewählten Bezugsrichtungen das Übersetzungsverhältnis ü12 positiv ist. Eigenschaften Die Ausgangssignale sind hier proportional zu den Eingangssignalen. Der ideale Übertrager verhält sich Frequenzunabhängig und speichert keine Energie, da zu jedem Zeitpunkt die Momentanleistung am Eingang mit der Momentanleistung am Ausgang übereinstimmt; entsprechend auch für die komplexe Scheinleistung: 1 (−i2 (t)) = −u2 (t) i2 (t) = −p2 (t) ü12 1 = ü12 U 2 · (−I ∗2 ) = −U 2 I ∗2 = −S 2 ü12 p1 (t) = u1 (t) i1 (t) = ü12 u2 (t) · S 1 = U 1 I ∗1 Der ideale Übertrager kann nicht realisiert werden 3 . Dazu müssten unendlich grosse, ideal gekoppelte und ausserdem verlustfreie Induktivitäten existieren. Diese Idealisierung spielt dennoch für die Umrechnung von Netzwerken eine bedeutende Rolle, wie im weiteren gezeigt wird. Netzwerktransformation Stellt ein idealer Übertrager die einzige Verbindung zwischen zwei Netzwerken dar, so kann durch eine Transformation der Netzwerkgrössen der einen Seite auf die andere (z. B. von der Sekundär- auf die Primärseite) der Einfluss des idealen Übertragers berücksichtigt werden. Diese Netzwerktransformation erlaubt es den Übertrager aus dem Schema wegzulassen. Beispiel 1: Transformation eines passiven Zweipols auf die Primärseite Herleitung: U ü12 U 2 U Z 02 = 1 = = ü212 2 = ü212 Z 2 I1 −I 2 /ü12 −I 2 Ende Beispiel 1 Zusammengestellt für Widerstände und Leitwerte sowie für Transformationen auf Primärund auf Sekundärseite: Z 02 = ü212 Z 2 1 Y 02 = 2 Y 2 ü12 3 In einigen Formelbüchern wird dieses Konstrukt als idealer Transformator bezeichnet. Ein realer Transformator kann sich aber nicht einmal annähernd so verhalten! 18 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Abbildung 4.2.: Transformation eines passiven Zweipols auf die Primärseite Der komplexe Widerstand auf der Sekundärseite des idealen Übertragers wird auf die Primärseite Transformiert Z 001 = 1 Z ü212 1 Y 001 = ü212 Y 1 Mit diesem Formeln können alle (linearen) Bauteile einer auch komplizierteren Schaltung auf eine beliebige Seite des idealen Übertragers einzeln transformiert werden. Die Struktur der Schaltung bleibt dabei erhalten. Beispiel 2: Transformation eines aktiven Zweipols auf die Sekundärseite Abbildung 4.3.: Transformation einer linearen Spannungsquelle auf die Sekundärseite Zur Herleitung werden Leerlauf- und Kurzschlussbedingungen für die Original- und die transformierte Schaltung gleichgesetzt. Leerlauf (I2 = 0 → I1 = 0) : Kurzschluss (U2 = 0 → U1 = 0) : 1 1 U1 = U ü12 ü12 q1 U q1 −I 2 = ü12 I 1 = ü12 Z1 00 U q1 1 Z 001 = = 2 Z1 −I 2 ü12 U 00q1 = U 2 = Ende Beispiel 2 Zusammengestellt für ideale Spannungs- und Stromquellen sowie für Transformationen auf Primär- und auf Sekundärseite: Spannungsquelle: U 0q2 = ü12 U q2 1 Stromquelle: I 0q2 = I ü12 q2 19 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren 1 U ü12 q1 = ü12 I q1 Spannungsquelle: U 00q1 = Stromquelle: I 00q1 4.1.2. Ideal festgekoppelter Übertrager Der ideal festgekoppelte Übertrager besteht aus zwei ideal gekoppelten, verlustlosen Spulen mit den Induktivitäten L1 und L2 . Der entsprechende Kopplungsfaktor beträgt demzufolge k12 = 1. √ Somit nimmt die Gegeninduktivität L12 den maximal möglichen Wert L12 = L1 L2 an. Abbildung 4.4.: Ideal festgekoppelter Übertrager (k12 = 1 ↔ L12 = Durch Umformen der Wechselstromgleichungen für gekoppelte Spulen I1 U1 jω L1 jω L12 = jω L12 jω L2 U2 I2 erhält man mit L12 = √ L1 L2 für die Kettenmatrix4 : q L1 0 U1 U2 L2 q = L2 I1 −I 2 √1 jω L1 L2 √ L1 L2 ) (4.2) (4.3) L1 Das Spannungsübersetzungsverhältnis ist offensichtlich unabhängig von der sekundärseitigen Stromstärke (Last) sowie der Frequenz und entspricht der Quadratwurzel des Induktivitätsverhältnises: r U1 L1 = ü12 = U2 L2 Modell Zwei magnetisch ideal gekoppelte Spulen lassen sich durch eine Induktivitàt und einem idealen Übertrager modellieren. Die beiden möglichen Varianten sind in Abb. 4.5 dargestellt. 4 Die Herleitung ist eine Kleinübung welche den Studenten überlassen wird. 20 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren p Abbildung 4.5.: Ideal festgekoppelter Übertrager (k12 = 1 ↔ ü12 = L1 /L2 ) Links die ideal gekoppelten Spulen, rechts die beiden äquivalente (gleichwertige) Modelle, wie die Transformation der Induktivität auf die andere Seite zeigt. Frequenzgang Gegeben sei der ideal gekoppelte Übertrager mit dem Lastwiderstand R2 . Wie verhält sich der primärseitig gesehene Widerstand U 1 /I 1 ? Abbildung 4.6.: Ideal festgekoppelter Übertrager mit Lastwiderstand R2 = U2 /(−I2 ) q U1 I1 = = L1 ü12 U 2 L2 U 2 q = √1 L2 1 U 2 + ü112 (−I 2 ) √1 U + jω L1 L2 2 L1 R2 U 2 jω L1 L2 q L1 L2 jω R jω L1 L1 L2 2 q R2 = = L2 L2 L L2 1 1 + jω 1 + jω 2 √1 + R2 R2 jω L1 L2 L1 R2 Oberhalb der Grenzfrequenz ω ωg = R2 /L2 erscheint der Eingangswiderstand unabhängig von der Frequenz mit dem Wert R2 L1 /L2 = ü212 R2 im Einklang mit der Netzwerktransformation5 . Unterhalb dieser Grenzfrequenz dominiert der Einfluss der Induktivität L1 . 4.1.3. Verlustloser Übertrager Eine ideale magnetische Kopplung kann praktisch nicht realisiert werden: der Kopplungsfaktor ist auch im besten Fall etwas kleiner als 1 (0 < k12 < 1). Um dies zu berücksichtigen, wird die Forderung k12 = 1 fallen gelassen. Der sogenannte verlustlose Übertrager besteht also aus zwei gekoppelten, verlustlosen Spulen. 5 Die parallel zu R2 geschaltete Induktivität spielt bei grösseren Frequenzen keine Rolle mehr. 21 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Abbildung 4.7.: Verlustloser Übertrager (k12 < 1 ↔ L12 = k12 √ L1 L2 ) Durch Umformen √ der Wechselstromgleichungen (4.2) für gekoppelte Spulen unter der Annahme k12 = L12 / L1 L2 ergibt sich für die Kettenmatrix: L1 L2 −L212 L1 jω L12 U1 L12 U2 = (4.4) I1 −I 2 L2 1 jω L12 U1 I1 = 1 k12 L12 q 2 1−k12 k12 L1 L2 1 √1 k12 jω L1 L2 jω 1 k12 √ q L1 L2 L2 L1 U2 −I 2 (4.5) 2 wir Streufaktor des Übertragers genannt. Der Faktor σ = 1 − k12 Offensichtlich ist jetzt die Spannungsübersetzung abhängig von der Laststromstärke. Auch im Leerlauf (I 2 = I 1 = 0) entspricht die Spannungsübersetzung nicht mehr dem Verhältnis p L1 /L2 : r r U1 1 L1 L1 = > U2 k12 L2 L2 Ausserdem ist die Spannungsübersetzung des belasteten Übertragers jetzt frequenzabhängig. Modell √ √ Abbildung 4.8.: Verlustloser Übertrager (k12 < 1 ↔ L12 = k12 L1 L2 < L1 L2 ) Links die gekoppelten Spulen mit den drei Parametern L1 , L2 und k12 , rechts das äquivalente Modell mit vier Parametern: ü12 , LA , LB und LC . Dies bedeutet, dass irgend eine der vier Grössen frei festgelegt werden darf. Da im Modell gemäss Abb. 4.8 ein Parameter mehr enthalten ist als für die Nachbildung der gekoppelten Spulen nötig, kann ein Parameter frei gewählt werden. In der folgenden Tabelle sind drei Möglichkeiten dargestellt: 22 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Tabelle 4.1.: Modellparameter für verlustloser Übertrager Modell Wahl 1: LA = LC Wahl 2: LC = 0 Wahl 3: LA = 0 ü12 q L1 L2 k12 1 k12 q L1 L2 q LA LB LC (1 − k12 ) L1 k12 L1 (1 − k12 ) L1 2 )L (1 − k12 1 2 L k12 1 0 0 L1 L1 L2 2 1−k12 2 k12 L1 Bemerkungen • Um das Verhalten von Transformatoren nachzubilden, wird im Allgemeinen vom symmetrischen T-Modell entsprechend der Wahl 1 der Tabelle 4.1 ausgegangen (Dazu mehr im Abschnitt 4.2). • Eine numerische Simulation6 nach dem Modell „Wahl 1“ gemäss Abb. 4.8 ist nicht ratsam, da sie wegen dem möglichen Widerspruch zwischen dem Knotensatz am Berührungspunkt der drei Induktivitäten und den Anfangsbedingungen der Stromstärken in den Induktivitäten unweigerlich zu numerischen Schwierigkeiten führen wird7 . 4.2. Transformator Was die magnetische Kopplung betrifft, verhalten sich Transformatoren wie verlustlose Übertrager. Grundsätzlich aber müssen die dissipativen Verluste, wie sie im Abschnitt 3.2.1 auf S. 12 für Spulen beschrieben wurden, mitberücksichtigt werden. Dies ist trotz dem nichlinearen Verhalten des Kernmaterials möglich, da Transformatoren bei einer festen Frequenz und in der Regel unter gegebener Nennbelastung arbeiten. 4.2.1. Linearisiertes Transformatormodell Das lineare Modell des Transformators wird aus dem Ersatzschaltbild des verlustlosen Übertragers gemäss Abb. 4.8 aufgestellt. Dabei ist das symmetrische T-Modell üblich (Wahl 1 aus der Tabelle 4.1). Das p Spannungsübersetzungsverhältnis des eingesetzten idealen Übertragers lautet dabei ü12 = L1 /L2 und entspricht nicht der Spannungsübersetzung, auch nicht der im Leerlauf! Üblicherweise und wegen der einfachen Bestimmbarkeit wird für ü12 das Windungszahlverhältnis der Spulen genommen: r N1 L1 ü12 = ≈ N2 L2 Um die Kupfer- und Kernverluste mit zu modellieren, wird das Modell mit den Widerständen RCu1 , RCu2 und RF e ergänzt. 6 7 zum Beispiel mit Simulink Dies ist auf die unvermeidlichen Rundungsfehler bei der numerischen Berechnung zurückzuführen. 23 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Abbildung 4.9.: Linearisiertes Transformator-Modell mit dissipativen Verlusten Lh und die beiden Lσ1 werden Hauptinduktivität bzw. Streuinduktivitäten genannt. RF e bildet die Kernverluste und die beiden Widerstände RCu1 und RCu2 die Wicklungswiderstände nach. 4.2.2. Messtechnische Bestimmung der Transformatorparameter Die Modellparameter Lh , Lσ1 , RF e , sowie RCu1 und RCu2 können messtechnisch bestimmt werden. Vor der Messung sollten die (Beträge der) Nennwerte S2n , U2n , I2n , R2n , U1n des Transformators ermittelt werden. Die Grössen S2n , U2n , U1n sowie und ü12 = N1 /N2 (Windungszahlverhältnis) werden in der Regel durch den Hersteller angegeben. Abbildung 4.10.: Nennbetrieb mit Transformator als Vierpol (Zweitor) Kupferwiderstände Die Drahtwiderstände der Wicklungen (Kupferwiderstände) lassen sich durch eine Gleichspannungsmessung einfach bestimmen. Aufgepasst: Beim Ausschalten des Messstroms wird eine Spannung in der stromführenden Spule induziert. Um diese Spannung klein zuhalten, empfiehlt es sich die nicht ausgemessene Wicklung kurz zu schliessen. Der Kupferwiderstand RCu2 kann mittels Netzwerktransformation auf die linke Seite genommen werden, was folgendes Bild ergibt: 24 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Abbildung 4.11.: Linearisiertes Transformator-Modell mit dissipativen Verlusten Dabei wurde der Widerstand RCu2 auf die Primärseite umgerechnet: 0 RCu = ü212 RCu2 . 2 Hauptinduktivität und Eisenverlustwiderstand Diese beiden Grössen können durch eine Leerlaufmessung bestimmt werden. Im sekundärseitigen Leerlauf kann, falls Lh Lσ1 und RF e RCu , das Modell nach Abb. 4.11 vereinfacht werden, wie in Abb. 4.12 dargestellt: Abbildung 4.12.: Vereinfachtes Leerlaufmodell Gemessen werden U1n , I10 , U20 sowie die primärseitige Wirkleistung P10 . Damit lassen sich folgende Grössen berechnen: S10 = U1n I10 q 2 − P2 S10 Q10 = 10 Lh = RF e = ü12 ≈ 2 U1n ω Q10 2 U1n P10 U1n U20 (ungefährer Wert) Streuinduktivität und gesamter Kupferverlustwiderstand Diese beiden Grössen können durch eine Kurzschlussmessung bestimmt werden. Dabei ist zu achten, dass die Kurzschlussstromstärke dem sekundären Nennstrom entspricht. Dazu ist die Primärspannung gegenüber der Nennspannung entsprechend zu reduzieren. Im sekundärseitigen Kurzschluss kann, falls Lh Lσ1 und RF e RCu , das Modell nach Abb. 4.11 vereinfacht werden, wie in Abb. 4.13 dargestellt: 25 4. Magnetisch gekoppelte Spulen: Übertrager und Transformatoren Abbildung 4.13.: Vereinfachtes Kurzschlussmodell Gemessen werden U1k , I1k sowie die primärseitige Wirkleistung P1k . Damit lassen sich folgende Grössen berechnen: S1k = Q1k = Lσ1 = 0 RCu1 + RCu 2 ü12 ≈= ≈ U I q1k 1k 2 − P2 S1k 1k 1 Q1k 2 2 ω I1k P1k 2 I1k I2n (ungefährer Wert) I1k Umrechnung Transformatorparameter ↔ gekoppelte Spulen Tabelle 4.2.: Umrechnungstabelle Transformator → gekoppelte Spulen gekoppelte Spulen → Transformator ü12 = q ü12 = L L k12 = √ 12 h k12 = L +L h σ1 L1 L2 L1 L2 L1 = Lh + Lσ1 L2 = q Lσ1 Lσ2 Lh = k12 L1 = ü12 L12 Lh +Lσ1 ü212 Lσ1 = (1 − k12 ) L1 = ü12 √ L L12 = ü h 12 Lσ2 = (1 − k12 ) L2 = 26 √ L1 L2 − L12 L1 L2 −L12 ü12 A. Frequenzverhalten von Drahtwiderständen Abbildung A.1.: Frequenzgang von Leistungswiderständen in Funktion des Widerstandwertes (Modulohm, 3/5 watt) Unterhalb von 4 kΩ dominiert das induktive Verhalten infolge Drahtwicklung, oberhalb die Kapazität zwischen den Windungen 27 Literaturverzeichnis [1] A. Führer, K. Heidemann, W. Nerreter: Grundgebiete der Elektrotechnik, Band 1: Stationäre Vorgänge Hanser, 8. Auflage, ISBN-13: 978-3-446-40668-1, Preis: e 19.90 [2] A. Führer, K. Heidemann, W. Nerreter: Grundgebiete der Elektrotechnik, Band 2: Zeitabhängige Vorgänge Hanser, 8. Auflage, ISBN-13: 978-3-446-40573-8, Preis: e 19.90 [3] A. Führer, K. Heidemann, W. Nerreter: Grundgebiete der Elektrotechnik, Band 3: Aufgaben Hanser, 2. Auflage, ISBN-13: 978-3-446-41258-3, Preis: e 19.90 [4] E. Hering, K. Bressler, J. Gutekunst: Elektronik für Ingenieure und Naturwissenschaftler Springer, 5. Auflage, ISBN-13: 978-3-540-24309-0, Preis: e 44.95 [5] K. Küpfmüller, W. Mathis, A. Reibiger: Theoretische Elektrotechnik: Eine Einführung Springer, 17. Auflage, ISBN-13: 978-3-540-29290-6, Preis: ab e 42.00 28