Inhalt - Institut für Elektrische Energiewandlung
Werbung

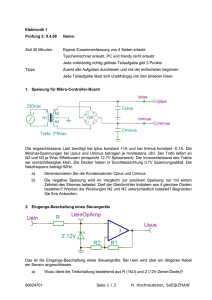
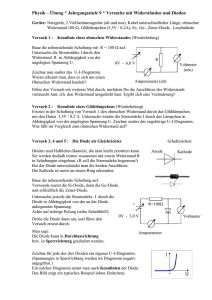
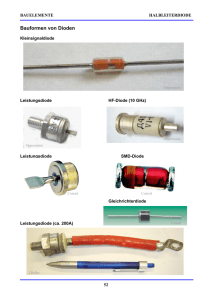
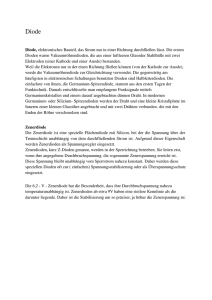
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 4 Halbleiterelektronik – Diode ...................................................................................................... 4-1 4.1 Leitungsmechanismus in Halbleitern .................................................................................. 4-1 4.1.1 Kristallaufbau ............................................................................................................... 4-1 4.1.2 Eigenleitung in Halbleitern .......................................................................................... 4-2 4.1.3 Dotierung ..................................................................................................................... 4-2 4.2 Halbleiterdiode .................................................................................................................... 4-4 4.2.1 Der stromlose p-n-Übergang........................................................................................ 4-4 4.2.2 Stromdurchflossener p-n-Übergang ............................................................................. 4-5 4.2.3 Die ideale Diodenkennlinie.......................................................................................... 4-7 4.2.4 Die reale Diodenkennlinie ........................................................................................... 4-7 4.2.5 Die linearisierte Diodenkennlinie .............................................................................. 4-14 4.2.6 Bauarten von Dioden ................................................................................................. 4-15 4-1 4 Halbleiterelektronik – Diode 4.1 Leitungsmechanismus in Halbleitern 4.1.1 Kristallaufbau Die technisch wichtigsten Halbleiter bestehen aus Elementen der vierten Hauptgruppe des Periodensystems (Silizium, Germanium). Diese Stoffe haben in Reinform eine Kristallstruktur. Sie sind wie ein Diamantgitter tetraederförmig aufgebaut. Bild 4.1 Gitterstruktur eines Diamantkristalls Zur vereinfachten Darstellung des Leitungsmechanismus in Halbleitern ist es sinnvoll, das Gitter in eine Ebene zu projizieren. Bild 4.2 Projektion der Diamantstruktur in eine Ebene Reine Halbleiter sind bei tiefen Temperaturen elektrisch nichtleitend. Alle Außen-Elektronen sind an der kovalenten chemischen Bindung beteiligt und daher in der Kristallstruktur unbeweglich. Sie befinden sich energetisch im sogenannten Valenzband (vergleichbar mit der äußeren Elektronenschale eines Atoms). In technischen Anwendungen bestehen die weitaus meisten Halbleiter aus Silizium (höhere Temperatur- und Spannungsfestigkeit gegenüber Germanium). Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-2 4.1.2 Eigenleitung in Halbleitern Bei höheren Temperaturen werden durch die thermische Bewegung einzelne Elektronen aus dem Valenzband in das energetisch gesehen nächsthöhere (Energie)band, das sogenannte Leitungsband, gehoben. Das Leitungsband entspricht der nächsten energetischen Stufe oberhalb der äußeren Elektronenschale eines Atoms. Dadurch entstehen frei bewegliche Elektronen im Leitungsband, die eine elektrische Leitfähigkeit des Kristalls bewirken. Parallel zu diesen frei beweglichen Elektronen im Leitungsband entstehen Fehlstellen im Valenzband, die ebenfalls zur elektrischen Leitfähigkeit des Kristalls beitragen. In einem Halbleiter liegen parallel zwei Leitungsmechanismen vor: Im Leitungsband wandern Elektronen vom Minus- zum Pluspol. Es handelt sich um eine Leitung durch negative Ladungsträger (n-Leitung) Im Valenzband wandern Fehlstellen (Defektelektronen oder Löcher) vom Plus- zum Minuspol. Es handelt sich um eine Leitung von „positiven“ Ladungsträgern (p-Leitung). Im Unterschied zur metallischen Leitung steigt die Leitfähigkeit eines Halbleiters mit der Temperatur an, da durch die thermische Bewegung zunehmend mehr Elektronen genügend Energie zugeführt bekommen, um einen Wechsel in das Leitungsband vollziehen zu können. Dieser Mechanismus wird Eigenleitung genannt. 4.1.3 Dotierung Als Dotierung bezeichnet man die gezielte Verunreinigung eines Kristalls durch Fremdatome. Wenn hierzu Elemente aus der fünften Hauptgruppe (P, As oder Sb) benutzt werden, ist eines der Außenelektronen des Fremdatoms nicht an der Bindung beteiligt (siehe Bild 4.3). Das zusätzliche freie Elektron bewirkt eine Erhöhung der Leitfähigkeit. Ein solches Fremdatom wird als Donator (Elektronenspender) bezeichnet, der Halbleiter ist n-dotiert. Wenn zur Dotierung Elemente der dritten Hauptgruppe (B, Al, Ga oder In) benutzt werden, fehlen Elektronen im Valenzband, d. h. es werden Defektelektronen erzeugt. Auch das Defektelektron bewirkt eine Erhöhung der Leitfähigkeit. Ein solches Fremdatom wird als Akzeptor bezeichnet, der Halbleiter ist p-dotiert (siehe Bild 4.3). Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-3 n-dotierter Halbleiter (Donator grau) Bild 4.3 p-dotierter Halbleiter (Akzeptor grau) Dotierungen von Halbleiter Dotierte Halbleiter weisen daher in einem gewissen Temperaturbereich eine deutlich höhere Leitfähigkeit als Reinkristalle auf (siehe Bild 4.4). Die Störstellenleitung setzt bei niedrigen Temperaturen (um 100 K) abhängig von der Konzentration der Donatoren (N-) bzw. Akzeptoren (N+) ein. In einem mittleren Bereich (etwa 200 – 400 K) befinden sich alle Elektronen der Donatoren im Leitungsband (Störstellenerschöpfung). Bei sehr hohen Temperaturen nähert sich der spezifische Widerstand dem der Eigenleitung, da die thermische Bewegung mehr Elektronen und Defektelektronen freisetzt als durch die Dotierung zur Verfügung gestellt werden. Bild 4.4 Spezifischer Widerstand ρ von undotiertem und n-dotiertem Germanium Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-4 4.2 Halbleiterdiode 4.2.1 Der stromlose p-n-Übergang In technischen Anwendungen werden oft beide Dotierungsarten in unterschiedlichen Bereichen eines Bauteils verwendet. Bild 4.5 zeigt die einfachste Kombination, den sogenannten p-n-Übergang. Im Bereich des Übergangs diffundieren die überschüssigen Elektronen aus dem Leitungsband des n-Bereichs in das energetisch niedrigere Valenzband des p-Bereichs (im Bild 4.5 von rechts nach links). Bild 4.5 p-n-Übergang und Diffusionsstrom der Ladungsträger In größerer Entfernung vom Übergang bleiben die Elektronen und die Defektelektronen erhalten. Die Strömung der Elektronen im Übergangsbereich, die durch das Streben eines Elektrons von der n-Seite in das energetisch niedrigere Valenzband der p-Seite zustande kommt, wird Diffusionsstrom genannt. Die Atome auf der n-Seite, die ein Elektron verloren haben, sind nach dem Verlust des Elektrons elektrisch positiv geladen. Gleichzeitig sind die Atome, die auf der p-Seite ein Elektron erhalten haben, elektrisch negativ geladen. Dadurch entstehen im Kristall zwei Bereiche mit unterschiedlichen Ladungen (Raumladungszone). Es entsteht ein elektrisches Feld, welches im Bild 4.5 von rechts nach links gerichtet ist. Durch das elektrische Feld entsteht dann eine elektrische Spannung zwischen den beiden Raumladungszonen, die so gerichtet ist, dass eine weitere Wanderung der Elektronen von der n-Seite zur p-Seite verhindert wird. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-5 Der Bereich des p-n-Übergangs wird als Sperrschicht bezeichnet, da er praktisch frei von beweglichen Ladungsträgern ist. Die Breite der Sperrschicht wird im (äußerlich) stromlosen Zustand hauptsächlich durch die Konzentration der Ladungsträger, d. h. durch die Dotierung bestimmt. Die Spannungsdifferenz zwischen n- und p-Gebiet wird als Diffusionsspannung UD bezeichnet. Sie hängt vom Material (Energiedifferenz zwischen Valenz- und Leitungsband) und von der Konzentration der Dotierung ab. Die Diffusionsspannung beträgt bei Silizium: UD ≈ 0,6 - 0,7 V Germanium: UD ≈ 0,2 - 0,3 V III-V-Halbleitern (z. B. GaAs): UD ≈ 1,4 - 2,9 V 4.2.2 Stromdurchflossener p-n-Übergang Wenn eine äußere Spannung an den p-n-Übergang angelegt wird, verändern sich die Konzentrationen der Ladungsträger, da vom Minuspol Elektronen nachgeschoben werden und vom Pluspol Elektronen abgesaugt werden. Die unterschiedliche Konzentration der Ladungsträger bewirkt einen Diffusionsstrom im p-n-Übergang. Bei Anlegen einer positiven Spannung zwischen der p-Schicht und der n-Schicht erhöht sich die Konzentration der Ladungsträger und die Breite der Sperrschicht verringert sich. Der Strom steigt exponentiell mit der Spannung an. Bei Anlegen einer negativen Spannung zwischen der p-Schicht und der n-Schicht verringert sich die Konzentration der Ladungsträger und die Breite der Sperrschicht vergrößert sich. Der Strom wird geringer und nähert sich einem durch Diffusion bestimmten (recht niedrigen) Wert. Das bedeutet, dass ein p-n-Übergang einen stromabhängigen Widerstand besitzt: für U > 0 wird der Widerstand sehr klein für U < 0 wird der Widerstand sehr groß Dieses stromrichtungsabhängige Verhalten wird technisch in (Halbleiter-) Dioden genutzt. Die Strom-Spannungs-Kennlinie (SSK) einer (realen) Diode ist im Bild 4.6 dargestellt. In der Realität treten noch die folgenden Effekte auf: Der gesamte Halbleiter hat in den Bereichen außerhalb der Diffusionszonen einen ohmschen Widerstand (Bahnwiderstand). Dadurch steigt mit zunehmendem Diodenstrom I > 0 auch die Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-6 Spannung U an der Diode an. Der Widerstand ist von der Dotierungskonzentration und von der Querschnittsfläche der Diode abhängig; er kann Werte zwischen einigen mΩ und einigen zehn Ω annehmen. Bei negativen Spannungen fließt zunächst (fast) kein Strom durch die Diode. Jedoch wird ab einer gewissen negativen Spannung die Feldstärke im Halbleiter so groß, dass durch die Energie im elektrischen Feld weitere Ladungsträger freigesetzt werden. Der Strom in negativer Richtung steigt somit stark an. Die aufgrund der entstehenden Verluste einsetzende Erwärmung bedingt eine weitere thermisch bedingte Freisetzung von Ladungsträgern. Der Vorgang wird als (Lawinen-) Durchbruch bezeichnet. Die Spannung an der Diode ist bei diesem Vorgang nahezu konstant. Sie wird als Durchbruchs- oder Zener-Spannung UZ bezeichnet. UZ hängt hauptsächlich von der Dotierungskonzentration ab: niedrige Dotierung bedeutet hohe Durchbruchsspannung und umgekehrt. Der Durchbruch ist reversibel, solange es nicht zu einer thermischen Überlastung der Diode kommt. Bild 4.6 Strom-Spannungs-Kennlinie (SSK) einer realen Diode Der Aufbau einer Diode ist im Bild 4.7 schematisch dargestellt. Bild 4.7 Aufbau einer Diode (schematisch) Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-7 Die Diode bekommt ein eigenes Schaltsymbol (siehe Bild 4.8). Die beiden Anschlüsse werden als Anode (A) und Kathode (K) bezeichnet. 4.2.3 Die ideale Diodenkennlinie Für eine grobe Analyse und Synthese von elektrischen Schaltungen ist es meist nicht erforderlich, die in Bild 4.6 dargestellte (reale) Kennlinie zu berücksichtigen. Oft genügt es, eine „ideale“ Diode zu betrachten (siehe Bild 4.8). I A Bild 4.8 Ideale Diode – K UAK Kennlinie (links) und Schaltsymbol (Mitte) Die ideale Diode ist durch die im Bild 4.8 dargestellte Strom-Spannungs-Kennlinie gekennzeichnet. Es gelten folgende Zusammenhänge: UAK = 0 für I>0 I=0 für UAK < 0 Sowohl für die reale als auch für die ideale Diode werden dieselben Schaltsymbole verwendet. Die ideale Diode repräsentiert einen elektrisch gesteuerten Schalter. Der Schalter leitet, wenn die angelegte Spannung zwischen Anode und Kathode positiv ist, und sperrt, wenn die Spannung zwischen Anode und Kathode negativ ist. 4.2.4 Die reale Diodenkennlinie Für eine genaue Berechnung von elektrischen Schaltungen muss mit der im Bild 4.6 dargestellten realen Diodenkennlinie gearbeitet werden. Da die reale Diodenkennlinie eine nichtlineare Kennlinie ist, wird an dieser Stelle eine kurze Einführung im Umgang mit nichtlinearen Elementen in elektrischen Schaltungen gegeben. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-8 4.2.4.1 Nichtlineare Bauelemente und Netzwerke Viele Materialien und elektronische Bauelemente weisen ein nichtlineares Verhalten in ihrer StromSpannungs-Kennlinie auf, welches sich durch einen nichtlinearen Zusammenhang der physikalischen Größen bemerkbar macht. Im Beispiel der hier vorgestellten Halbleiterdiode ist der Zusammenhang zwischen Diodenstrom und Spannung an der Diode nichtlinear. Weitere wichtige Typen von nichtlinearen elektrischen Bauelementen sind: Heißleiter (z. B. Thermistor) Kaltleiter (z. B. Glühlampe) Halbleiter (z. B. Diode, Transistor) Im Bild 4.9 sind die Strom-Spannungs-Kennlinien von einigen nichtlinearen Bauelementen dargestellt. Im Gegensatz zu einer linearen Strom-Spannungs-Kennlinie, bei der der Wert des Widerstands R (Steigung der Kennlinie) konstant ist, ändert sich bei nicht linearen StromSpannungs-Kennlinien der Widerstandswert in jedem Punkt der Kennlinie. Bei nichtlinearen Kennlinien ist es daher sinnvoll zwei Widerstände zu definieren: 1. Statischer Widerstand: Er bezieht sich auf den Wert des Widerstands in einem jeden Punkt der Strom-SpannungsKennlinie. 2. Differentieller Widerstand: Er entspricht dem Wert des Widerstands der einem kleinen Arbeitsbereich auf der Kennlinie zugeordnet ist (Steigung der Tangente bzw. Sekante). Im nachfolgenden Bild 4.9 sind einige Strom-Spannungs-Kennlinien von elektrotechnischen Bauelementen abgebildet. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-9 a) Widerstände: b) Diode 1 linearer (ohmscher) Widerrstand 2 Glühlampe 3 Thermistor c) Eingangskennlinie eines Bipolartransistors d) Ausgangskennlinie eines Bipolartransistors Bild 4.9 Strom-Spannungs-Kennlinien einiger Bauelemente der Elektrotechnik Zur genaueren Erklärung der oben eingeführten Widerstände betrachten wir die Kennlinie aus dem nachfolgenden Bild 4.10. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-10 I[A] U A = l UA ⋅ m U A ∆I IA I A = lIA ⋅ m I [m U ] = V cm [m I ] = A cm α β ∆U U[V] UA Bild 4.10 Statischer und differentieller Widerstand Der statische Widerstand im Punkt A wird definiert als: RS = U A m U ⋅ l UA l = = m R UA = m R ⋅ tan α IA m I ⋅ l IA l IA (4.1) mU, mI und mR sind die Maßstäbe für die Spannung, den Strom und den Widerstand (z. B. mU = 1V ). Der Winkel α ist der Winkel zwischen der Strom-Achse und der Gerade, die den Punkt cm A auf der I-U-Kennlinie mit dem Koordinatenursprung (Koordinatenanfangspunkt) verbindet. Der differentielle bzw. dynamische Widerstand im Punkt A wird definiert als: Rd = dU ∆U = lim = m R ⋅ tan β I 0 ∆ → dI ∆I (4.2) Er entspricht der Ableitung der Spannung nach dem Strom im Punkt A (Tangente im Punkt A). Der Winkel β liegt zwischen der Tangente zur I-U-Kennlinie im Punkt A und der Stromachse. Für die im Bild 4.10 gegebene Kennlinie ist der Winkel β kleiner als der Winkel α, so dass in diesem Beispiel der dynamische Widerstand im Punkt A auch kleiner als der statische Widerstand im Punkt A ist. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-11 Anmerkung 1: Im Gegensatz zum statischen Widerstand, der positiv oder gleich Null sein kann, kann der dynamische Widerstand positiv, negativ oder gleich Null sein. Anmerkung 2: In einem linearen Element ist der dynamische Widerstand gleich dem statischen Widerstand. Häufig wird bei grafischen Lösungen die Tangente durch eine Sekante ersetzt: Rd = dU ∆U ≈ dI ∆I (4.3) 4.2.4.2 Berechnung von nichtlinearen Netzwerken Ein Netzwerk, das mindestens einen nichtlinearen Widerstand enthält, wird als nichtlineares Netzwerk definiert. Für die Berechnung von nichtlinearen Netzwerken werden die Kirchhoffschen Gesetze (Knoten- bzw. Maschenregel), das Ohmsche Gesetz und alle Rechenverfahren mit Ausnahme vom Überlagerungssatz (!) angewendet. Um die gesuchten Werte für Spannungen und Ströme zu ermitteln, gibt es die Möglichkeit sowohl grafische als auch analytische Methoden zu benutzen. Grafische Methode: Zur Erläuterung der grafischen Lösung wird das nichtlineare Netzwerk aus dem Bild 4.11 (rechts) betrachtet. Dieses Netzwerk besteht aus der Reihenschaltung eines linearen Widerstands RL und eines nichtlinearen Widerstands RN. Die Kennlinie des nichtlinearen Widerstands ist im linken Teil von Bild 4.11 dargestellt. IN I RL UL RN UN Uq UN a) Schaltung Bild 4.11 b) Kennlinie des nichtlinearen Bauelements RN Schaltung mit einem linearen (RL) und einem nichtlinearen Widerstand (RN) Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-12 Folgende Daten seien bekannt: Spannung Uq, der Wert des linearen Widerstands RL und die Strom-Spannungskennlinie des nichtlinearen Widerstandes IN = f(UN). Zu ermitteln sind: Der Strom I und die Spannungen UL und UN. Es gibt einige grafische Ansätze, die zum selben Ergebnis führen. Hier wird eine Methode erläutert, die als „Methode der Ersatzspannungsquelle zur Lösung des nichtlinearen Netzwerks“ bezeichnet wird. Die Bezeichnung impliziert die Voraussetzung, dass ein Netzwerk mit einem nichtlinearen Element als eine Ersatzspannungsquelle (bzw. Ersatzstromquelle) zusammengefasst werden kann, die das nichtlineare Element als „Verbraucher“ hat. Zuerst werden sinnvolle Maßstäbe mI für den Strom I und mU für die Spannung U gewählt und die I-U-Kennlinie des nichtlinearen Widerstands gezeichnet. I 1 I IK ' U12 (I) = UN (I) '' U12 (I) Uq RN UL A IA UA Bild 4.12 Uq U RL UN U12 2 Ermittlung des Stroms I nach der Methode der Ersatzspannungsquelle In der Schaltung wird dann die Spannungsquelle Uq zusammen mit dem linearen Widerstand RL als eine reale Spannungsquelle betrachtet. Für die Klemmenspannung U12 folgen aus der Maschenregel zwei Gleichungen: 1. Spannungsabfall am Widerstand RN (gegeben durch die nichtlineare Kennlinie im Bild 4.11) ' U12 = U N ( I) Einführung in die Elektrotechnik Teil II (4.4) Kapitel 4: Halbleiterelektronik – Diode 4-13 2. Die Spannung an den Klemmen der realen Spannungsquelle: '' U12 = Uq − R 1 ⋅ I (4.5) Diese Spannung ist durch die Gerade im Bild 4.12 gegeben. Die grafische Lösung der Aufgabe ist der Schnittpunkt der beiden Kurven. Denn nur in dem Schnittpunkt gilt: ' '' U12 = U12 = U12 (4.6) Im Punkt A ist die Gleichung (4.6) erfüllt. Die gesuchten Werte für den Strom und die Spannung können dann aus dem Diagramm abgelesen werden. Bei Betrieb der Schaltung an der Spannung Uq stellt ein Betriebszustand entsprechend Punk A ein. Er wird daher als Arbeitspunkt (AP) bezeichnet. Analytische Methode: Für kleine Änderungen innerhalb eines Arbeitsbereichs bzw. um einen Arbeitspunkt des nichtlinearen Widerstandes wird die Strom-Spannungskennlinie um diesen Arbeitspunkt linearisiert. Gegeben sei wiederum die Strom-Spannungskennlinie des nichtlinearen Widerstandes (siehe Bild 4.13 a), sowie der Arbeitspunkt „A“ bzw. der Arbeitsbereich (siehe Bild 4.13 b). Bild 4.13 Zur Ermittlung der Ersatzspannung US und des differentiellen Widerstandes Rd Die I-U-Kennlinie wird durch die Sekante „S“ um den Punkt „A“, die im Spannungsbereich ∆U gut mit der I-U-Kennlinie übereinstimmt, ersetzt. Das nichtlineare Element wird innerhalb des definierten Arbeitsbereichs durch die lineare Gleichung der Sekante beschrieben. Die Gleichung Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-14 dieser Sekante im I-U-Kennlinienfeld ist eine Geradengleichung, die wie folgt beschrieben werden kann: U = US + R d ⋅ I (4.7) Diese Gleichung beschreibt den Zusammenhang zwischen der Klemmenspannung U und dem Klemmenstrom I einer Schaltung, die aus einem Widerstand Rd und einer Spannungsquelle Us besteht. Dieser Zusammenhang ist durch das lineare Ersatzschaltbild im Bild 4.13 c wiedergegeben. Die unbekannten Werte für Rd und Us werden wie folgt bestimmt: Nach der Definition ist Rd der differentielle Widerstand im Arbeitspunkt A: Rd = ∆U U2 − U1 = ∆I I2 − I1 (4.8) Die Spannung Us ergibt sich z. B. für den Punkt U1 und I1, der im Arbeitsbereich liegt, aus Gleichung (4.7) zu: U S = U1 − R d ⋅ I1 4.2.5 (4.9) Die linearisierte Diodenkennlinie Wird die Diodenkennlinie in Durchlassrichtung um einen Arbeitspunkt linearisiert, so ergibt sich das elektrische Ersatzschaltbild, welches im Bild 4.13 bereits angegeben ist. In diesem Ersatzschaltbild beschreiben der Widerstand Rd und die Spannungsquelle Us die linearisierte Kennlinie. Die in Reihe zu Rd und Us geschaltete ideale Diode (mit der Kennlinie entsprechend Bild 4.8) begrenzt die Linearisierung auf den ersten Quadranten, der Durchlassrichtung, der Diode. Anmerkung 3: In der Praxis ist der nach der Linearisierung ermittelte Wert der Spannung Us in der Größenordnung der Diffusionsspannung der Diode: US ≈ UD , sodass das Ersatzschaltbild gemäß Bild 4.11 das Verhalten der Diode sehr gut beschreibt. Damit die ideale Diode im Bild 4.14 leitend wird, muss die Spannung an dieser positiv werden. Dies wird erst dann möglich, wenn die Spannung zwischen Anode und Kathode der realen Diode den Wert der Diffusionsspannung übersteigt. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-15 Bild 4.14 4.2.6 Linearisierte Diodenkennlinie Bauarten von Dioden Dioden werden für die verschiedensten Anwendungen gebaut: In der Signalelektronik müssen Dioden vor allem schnell schalten. Sie sind daher relativ klein und weisen geringe Kapazitäten und Diffusionswege auf. Der Durchlassstrom liegt bei einigen 10 mA. Die Grenzfrequenzen liegen im GHz-Bereich. In der Energietechnik müssen Dioden große Ströme und Spannungen schalten Sie sind daher deutlich größer. Der Durchlassstrom solcher Leistungsdioden liegt zwischen 1 A und einigen kA. In einigen Dioden wird der Effekt genutzt, dass die Durchbruchspannung nahezu unabhängig vom Strom ist (Durchbruchspannung nahezu konstant). Diese Dioden nennt man Zenerdioden. Sie werden z. B. zur Spannungsstabilisierung eingesetzt. Bild 4.15 Zenerdiode als Konstantspannungsquelle (idealisiert) Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-16 Im p-n-Übergang entstehen Sprünge der Elektronen vom Valenz- in das Leitungsband und umgekehrt. Dies wird in Leuchtdioden (LED) zur Emission von Licht. Die Wellenlänge kann aus der für den Sprung vom Valenz- in das Leitungsband notwendigen Energie W abgeschätzt werden (mit UD: Diffusionsspannung, e+: Elementarladung, h: Planck’sches Wirkungsquantum, f: Frequenz, c: Lichtgeschwindigkeit und λ: Wellenlänge): W = U D ⋅ e+ = h ⋅ f = h ⋅ c λ (4.10) Für LEDs werden Halbleiter aus III-V-Elementen (z. B. GaAs) genutzt, die eine höhere Diffusionsspannung (etwa 2 V) aufweisen und damit sichtbares Licht erzeugen. LEDs erzeugen monochromatisches Licht. „Weiße“ LEDs können durch die Mischung der Farben mehrerer LEDs (Multi-LED) oder durch die Mischung der Lichtstrahlungen einer Blau- und einer UVLED mit gelber Photoluminenszenz-Schicht gebaut werden. LEDs weisen einen höheren Wirkungsgrad und eine höhere Lebensdauer als herkömmliche Glühlampen auf. Sie werden als Anzeigeelemente und zunehmend auch als Leuchtmittel eingesetzt. Umgekehrt kann auch Lichtenergie in elektrische Energie umgewandelt werden. Eine solche Diode wird als Solarzelle bezeichnet. Die Sperrschicht von Dioden weist eine Kapazität auf, die durch die Sperrschichtbreite bestimmt wird. Durch Variation der Sperrspannung kann die Sperrschichtbreite und somit die Kapazität des p-n-Übergangs variiert werden. Dioden bei denen dieser Effekt genutzt wird bezeichnet man als Kapazitätsdioden. Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode 4-17 Dioden für signalelektronische Anwendungen. Stromtragfähigkeit bis 1 A. (Infineon) L Länge L = 80 mm D Brückengleichrichter aus 6 Dioden zur Gleichrichtung von Drehstrom aus dem 0,4 kV Drehstromnetz. (Infineon) Höchstleistungsdiode. 6 kV / 3 kA Durchmesser D = 200 mm Anwendung in Bahnantrieben. (eupec) LED-Kfz-Rücklicht (Audi) Solarzellen (RWE Schott) Bild 4.16 Bauformen von Dioden für verschiedene Anwendungen Einführung in die Elektrotechnik Teil II Kapitel 4: Halbleiterelektronik – Diode