Diplomarbeit - Zuse Institute Berlin
Werbung

Schnittmodellierung auf
triangulierten Polygonoberflächen
Diplomarbeit
erstellt am
Konrad-Zuse-Zentrum für Informationstechnik Berlin
Abt. Wissenschaftliche Visualisierung
vorgelegt von
Adam Trepczynski
November 2002
Technische Universität Berlin
Fachbereich IV
Institut für Technische Informatik
FG: Computer Graphics / Computer Assisted Medicine
Prof. Dr. Heinz U. Lemke
2
Inhalt
1 Einführung ...............................................................................5
2 Schnittmodellierung - Stand der Technik.............................7
2.1 Schneiden von Volumendaten........................................................ 7
2.2 Schneiden von Tetraeder-Gittern ................................................... 8
2.3 Schneiden von triangulierten Polygonoberflächen ...................... 9
2.3.1 Schnitt mit einer Schnittfläche ................................................. 9
2.3.2 Direktes Schneiden ............................................................... 11
3 Realisierung...........................................................................12
3.1 Schneiden durch Einzeichnen von Schnittkonturen .................. 12
3.2 Amira als Entwicklungsplattform ................................................. 14
3.2.1 Das Modul-Konzept von Amira.............................................. 14
3.2.2 Amira erweitern ..................................................................... 16
3.2.3 Benutzte Datenstrukturen...................................................... 16
3.3 Zeichnen auf Polygonoberflächen ............................................... 18
3.3.1 Grundlagen............................................................................ 18
3.3.1.a Von 2D zu 3D .......................................................................... 18
3.3.1.b Punkte auf einer Polygonoberfläche verbinden........................ 20
3.3.1.c Verfolgen von Wegen auf Nicht-Mannigfaltigkeiten.................. 22
3.3.2 Implementierung.................................................................... 25
3.3.3 Ergebnisse und Ausblick ....................................................... 27
3.4 Triangulieren von Konturen.......................................................... 30
3.4.1 Grundlagen............................................................................ 30
3.4.1.a Allgemeine Regelflächen ......................................................... 30
3.4.1.b Diskrete Regelflächen.............................................................. 31
3.4.1.c Allgemeine Minimalflächen ...................................................... 32
3.4.1.d Diskrete Minimalflächen........................................................... 33
3.4.1.e Weitere Methoden der Triangulation einer Kontur.................... 35
3.4.1.f Expansion der Oberfläche ........................................................ 37
3.4.1.g Hinzufügen eines Rands zu der Oberfläche............................. 40
3.4.2 Implementierung.................................................................... 41
3.4.2.a Erzeugung von Regelflächen................................................... 41
3.4.2.b Erzeugung von Minimalflächen................................................ 41
3.4.2.c Ear-Cutting-Triangulation ......................................................... 42
3.4.2.d Expansion und Rand ............................................................... 43
3.4.3 Ergebnisse und Ausblick ....................................................... 44
3
3.5 Schneiden von Polygonoberflächen ............................................48
3.5.1 Grundlagen ........................................................................... 48
3.5.1.a Der allgemeine Schnitt zweier Oberflächen ............................. 48
3.5.1.b Der diskrete Schnitt zweier Polygonoberflächen ...................... 49
3.5.1.c Schnitt zwischen einem Dreieck und einem Liniensegment ..... 49
3.5.1.d Schnittverläufe in einem Dreieck.............................................. 51
3.5.1.e Zerlegung des Dreiecks in Sektoren ........................................ 53
3.5.1.f Optimieren der Sektoren........................................................... 54
3.5.1.g Triangulieren der Sektoren ...................................................... 55
3.5.2 Implementierung ................................................................... 57
3.5.3 Ergebnisse und Ausblick....................................................... 60
4 Zusammenfassung und Bewertung ................................... 62
5 Quellennachweis .................................................................. 64
6 Abbildungsverzeichnis ........................................................ 66
4
1 Einführung
Die Motivation für diese Arbeit stammt aus dem Bereich der computerunterstützten Chirurgie-Planung. Zu den chirurgischen Eingriffen, die eine
besonders detaillierte Planung erfordern, gehören Knochenspaltungen
(Osteotomien) und Knochenumstellungen im Gesichtsbereich. Fehlstellungen im
Mund- und Kieferbereich stellen nicht nur ein ästhetisches und damit ein
psychologisches Problem für die Betroffenen dar, sie erschweren auch oft das
Kauen, das Sprechen und die Atmung. Um alle diese Probleme erfolgreich durch
einen chirurgischen Eingriff zu beheben, muss dieser sehr exakt und mit
Rücksicht auf verschiedene Abhängigkeiten der Anatomie geplant werden.
Traditionelle Planungsmethoden basieren auf Röntgenaufnahmen und Profilfotos
des Patienten, die benutzt werden um mit Verfahren der 2D-Bildbearbeitung die
optimale Verschiebung für die Knochenteile zu bestimmen. Diese Methode bietet
bereits eine ungefähre 2D-Prognose über das äußere Erscheinungsbild des
Patienten. Aus der Verlagerung von Knochenstrukturen im Profil wird auf die
Weichgewebeverlagerung geschlossen. Allerdings ist die exakte Planung eines
räumlichen Schnitts durch den Knochen auf diese Weise nicht möglich. Dies gilt
besonders bei ausgeprägten Asymmetrien des Gesichtsschädels. Für die
Schnittplanung werden üblicherweise Kunstharz-Modelle des Schädels
verwendet. Diese werden in einem Stereolithografie Verfahren aus computertomografischen Daten des Patienten erzeugt. Der Chirurg zeichnet darauf die
3D-Schnittkonturen ein und kann das Modell entsprechend des geplanten
operativen Eingriffs zerschneiden. Anschließend können die separierten Teile
umpositioniert und in ihrer neuen Position fixiert werden. Diese Schnittplanung
kann allerdings nur einmal an einem Modell durchgeführt werden. Um alternative
Schnitte zu untersuchen, müssten mehrere Modelle angefertigt werden, was sehr
kostspielig und daher nicht praktikabel ist. Das Knochen-Modell liefert zudem
keine Prognose über das äußere Erscheinungsbild des Patienten nach der
Operation.
Im Rahmen eines Forschungsprojektes der Abteilung für Wissenschaftliche
Visualisierung des Konrad-Zuse-Zentrums für Informationstechnik Berlin (ZIB)
werden Software-Werkzeuge entwickelt, die eine Planung von komplexen
Knochenumstellungen deutlich erleichtern sollen. Die Planung eines Eingriffs
gliedert sich dabei in folgende Schritte:
•
Gewinnung der Patientendaten mittels Computer- oder Magnetresonanztomografie. Das Ergebnis sind Volumendaten, die die individuelle Anatomie des Patientenkopfes wiedergeben. Typischerweise besteht ein
Volumendatensatz aus etwa 100–200 Schichtaufnahmen, mit den
Dimensionen von 512×512 Pixel.
•
Ausgehend von den Volumendaten wird durch Klassifizierung und
Segmentierung ein Oberflächen-Modell der Patienten-Daten erzeugt.
Verschiedene Bereiche werden in den einzelnen Schichten markiert und
entsprechenden anatomischen Strukturen zugeordnet. Dafür wurden am
ZIB effiziente semi-automatische und automatische Werkzeuge entwickelt. Die Begrenzungen der einzelnen Bereiche werden schichtenübergreifend zu Polygonoberflächen zusammengefügt.
5
•
Die Polygonoberflächen werden hinsichtlich Gitterqualität und Auflösung
optimiert und mit Tetraederelementen zu Volumengittern gefüllt. Diese
werden in späteren Planungsschritten für die Simulation der Weichgewebedeformation aufgrund von Knochenumstellungen, mittels der
Finite-Elemente-Methode benötigt.
•
An dem Oberflächen-Modell der Knochen wird der Schnitt, die
sogenannte Osteotomie geplant. Mit diesem Planungsschritt beschäftigt
sich die vorliegende Arbeit.
•
Die zerschnittenen Teile der Knochenoberfläche können nun frei
positioniert werden. Ähnlich wie bei der traditionellen Planung an einem
Kunststoff-Modell kann der Chirurg die optimale Umstellung in Hinblick
auf eine funktionelle Rekonstruktion ermitteln. Zusätzlich zur Planung am
Kunststoff-Modell kann das Computer-Modell eine Prognose über die
Deformation des umliegenden Weichgewebes liefern.
Die letzen beiden Schritte stellen den eigentlichen Planungsvorgang dar. Anders
als an einem Kunststoff-Modell können sie am computergrafischen Modell
beliebig oft durchgeführt werden. Dadurch ist es dem Chirurgen möglich,
verschiedene, alternative Schnitte zu erproben. Die Planung kann im Vergleich
zu traditionellen Methoden schneller und kostengünstiger durchgeführt werden.
Das Ziel der vorliegenden Arbeit ist es, Werkzeuge zu entwickeln, welche die
Definition des Schnitts durch den Knochen ermöglichen und die Polygonoberfläche entsprechend zerschneiden. Obwohl die Motivation für diese Arbeit
aus dem Bereich der computergestützten Chirurgie (CAS, computer assisted
surgery) kommt, sind solche Werkzeuge auch in anderen Bereichen der
Computergrafik anwendbar, wie zum Beispiel der allgemeine Bereich des
computergestützten Entwurfs (CAD, computer aided design).
Die Arbeit gliedert sich folgendermaßen: In Kapitel 2 wird der aktuelle Stand der
Technik für das Zerschneiden computergrafischer Modelle präsentiert. Kapitel 3
ist der Kernteil dieser Arbeit. Hier werden die Methoden der Schnittmodellierung
beschrieben, die im Rahmen dieser Arbeit entwickelt und implementiert wurden.
Dabei werden für die einzelnen Werkzeuge jeweils in einem Abschnitt die
mathematischen und algorithmischen Grundlagen beschrieben. Anschließend
wird konkret auf die Implementierung im Rahmen der Visualisierungs-Software
Amira eingegangen und zum Abschluss das jeweilige Ergebnis präsentiert. Die
Entwicklungsplattform Amira wird am Anfang von Kapitel 3 kurz vorgestellt.
6
2 Schnittmodellierung - Stand der Technik
Das folgende Kapitel soll einen Überblick über den Stand der
Technik im Bereich der Schnittmodellierung an computergrafischen Objekten geben. Dabei werden Methoden für
verschiedene Arten der Geometrie-Repräsentation beschrieben.
Dazu gehören: Volumendaten, Tetraeder-Gitter und triangulierte
Polygonoberflächen.
2.1 Schneiden von Volumendaten
Volumendaten sind besonders im medizinischen Bereich weit verbreitet.
Patienten-Modelle werden auf der Basis von CT- oder MR-Scans erstellt, die
Volumendatensätze liefern. Daher gibt es im Bereich der virtuellen Chirurgieplanung Ansätze, Schnittoperationen auf Volumendaten durchzuführen: [A90],
[YHYT90]. Im Vergleich zu einer reinen Oberflächen-Repräsentation haben
Volumendaten den Vorteil, dass sie auch innere Strukturen der Objekte
beinhalten. Dies ermöglicht eine besonders realistische Simulation von Schnittoperationen, bei denen die Schnittfläche Auskunft darüber gibt welche Strukturen
zerschnitten wurden. Ein Nachteil von Volumendaten ist der hohe Speicherbedarf, der allerdings aufgrund der technischen Entwicklung immer weniger
Bedeutung hat.
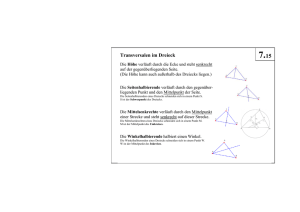
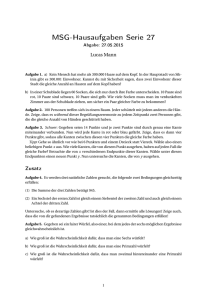
Da Volumendaten durch ihre Voxel-Auflösung beschränkt sind, ist die Darstellung
von Details und feinen Strukturen problematisch. Dieses Problem wird in
[PTHL99] angegangen. Die Schnittflächen werden dort im Sub-Voxel-Bereich
modelliert. Außerdem wurden flexible Schnittwerkzeuge wie ein sogenanntes
virtuelles Skalpell auf Volumendaten angewandt.
Abbildung 1: Schneiden von Volumendaten [PTHL99]
7
2.2 Schneiden von Tetraeder-Gittern
Tetraeder-Gitter sind eine weitere mögliche Volumen-Repräsentation von dreidimensionalen Objekten. Sie werden besonders dann verwendet, wenn
physikalische Simulationen an diesen Objekten durchgeführt werden sollen. Die
Tetraeder dienen dann auch als finite Elemente für die Simulation. Ein Beispiel
dafür, das oft im Zusammenhang mit der Schnittmodellierung einhergeht, ist die
Simulation von elastischen Körpern wie z.B. Weichgewebe. Für EchtzeitSimulationen werden dabei üblicherweise Masse-Feder-Modelle auf dem
Tetraeder-Gitter angewendet. Tetraeder-Gitter können, ebenso wie Voxeldaten,
innere Strukturen wiedergeben, wobei man zwischen regulären und irregulären
Gittern unterscheidet. Bei irregulären Gittern kann die Größe der Tetraeder, und
damit die Auflösung des Gitters, variieren. Bei regulären ist sie hingegen
konstant.
Ein auf Tetraedern basierender Ansatz zum Schneiden von Volumendaten wird
zum Beispiel in [MS97] verfolgt. Der Volumendatensatz wird in ein reguläres
Tetraeder-Gitter umgewandelt, mit Tetraedern in der Größenordnung der Voxel.
Um die für den Schnitt relevanten Bereiche innerhalb des Volumendatensatzes
effizient zu bestimmen, wird eine spezielle Octree-Datenstruktur verwendet. Als
Schnittwerkzeug dient ein virtuelles Skalpell, das einen Schnittpfad über die
Ausrichtung der Klinge und deren Länge (Schnitttiefe) definiert. Die Bewegung
des Skalpells wird als eine bilineare Interpolation der Klingen-Kante modelliert.
Dadurch entsteht eine Schnittfläche, die zum Zerschneiden der Tetraeder
verwendet wird.
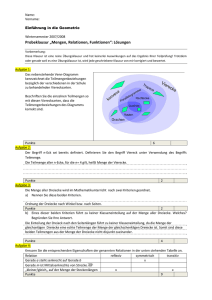
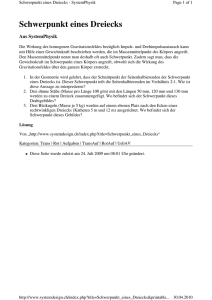
Abbildung 2: Fünf topologische Fälle beim Schneiden von Tetraedern [BMG98].
8
Das interaktive Zerschneiden von Tetraeder-Gittern wird u.a. in [BMG98] ausführlich beschrieben. Auch hier bilden voxelbasierte Volumenmodelle die Grundlage. Diese werden komplett in ein Tetraeder-Gitter umgewandelt. Dies kann
durch ein beliebiges Meshing-Verfahren geschehen, wobei das resultierende
Gitter, anders als bei [MS97], nicht regulär sein muss. Diese irregulären Gitter
werden häufig durch eine sukzessive Vergröberung eines regulären Gitters
erzeugt. Dies erlaubt es, Gitter zu verwenden, die an die Strukturen im Volumendatensatz angepasst und daher effizienter sind. An diesem Tetraeder-Gitter
werden dann interaktiv Schnittoperationen durchgeführt, wobei wieder ein
Skalpell durch eine Kante modelliert wird. Mit Hilfe eines 3D-Eingabegeräts wird
das virtuelle Skalpell durch das Tetraeder-Gitter bewegt. Dabei wird die Position
der Schnittkante, in kurzen Zeitabständen aktualisiert. Zwischen diesen Positionen wird dann geeignet interpoliert. In [BMG98] wird davon ausgegangen,
dass eine Interpolation durch eine Ebene bei kleinen Zeitschritten ausreichende
Genauigkeit bietet. Diese Ebene repräsentiert die aktuelle Schnittfläche, mit der
die Tetraeder zerschnitten werden. Fünf topologische Fälle, die dabei an einem
Tetraeder auftreten können, sind in Abbildung 2 dargestellt. Durch Ausnutzung
von Symmetrien lassen sich alle möglichen Fälle auf diese fünf zurückführen
[BMG98].
2.3 Schneiden von triangulierten
Polygonoberflächen
Triangulierte Polygonoberflächen sind in der Computer Grafik die am meisten
genutzte Repräsentation für dreidimensionale Objekte. Sie haben üblicherweise
einen geringeren Speicherbedarf als Volumendatensätze und können durch weit
verbreitete 3D-Grafik-Hardware schneller dargestellt werden, als Volumendaten.
Die Darstellung innerer Strukturen ist bei Oberflächenmodellen selektiv. Wenn
die Oberfläche eines Objektes keine ausreichende Information bietet, kann man
zusätzlich auch die Oberfläche einiger, besonders ausgezeichneter innerer
Strukturen darstellen. Dabei ist es sinnvoll die äußeren Oberflächen transparent
darzustellen.
2.3.1 Schnitt mit einer Schnittfläche
Die Vorteile von Polygonoberflächen machten sie zur Standard-Repräsentation,
auch für Objekte die Volumen einschließen (boundary representations). Dadurch
entstand der Bedarf, Operationen, die man auf Volumen durchführen kann, auch
auf die Oberflächen-Repräsentation von Volumen zu übertragen. Hierzu gehören
insbesondere Mengenoperationen wie Vereinigung, Schnitt oder Differenz von
zwei Volumen. Wenn man diese Operationen auf zwei geschlossenen
Oberflächen A und B durchführen will, ist der erste Schritt, beide Oberflächen mit
Hilfe der jeweils anderen zu zerschnieden. Damit werden beide Oberflächen in
jeweils zwei Teilmengen unterteilt: den Teil, der außerhalb der jeweils anderen
Oberfläche liegt (AO, BO) und den, der innerhalb der jeweils anderen Oberfläche
liegt (AI, BI). Diese Teilmengen müssen nicht unbedingt zusammenhängende
Teile der Oberfläche darstellen. Aus diesen vier Teilen lässt sich die Oberfläche
für das Ergebnis jeder Mengenoperation der von A und B eingeschlossenen
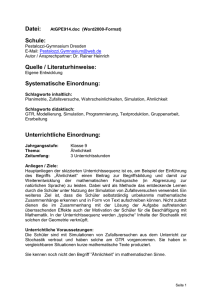
Volumen leicht zusammensetzen (siehe Abbildung 3).
9
A ∪ B = A O + BO
A \ B = A O + BI
A ∩ B = A I + BI
B \ A = BO + AI
Abbildung 3: Mengenoperationen auf Volumen durch ihre Begrenzungen
ausgedrückt
Die Genauigkeit, mit der die beiden Oberflächen mit der jeweils anderen
Oberfläche zerschnitten werden, ist entscheidend für die Qualität des
Ergebnisses der Mengenoperation. Daher haben sich Arbeiten aus dem Bereich
constructive solid geometry (CSG) mit dem Problem, eine triangulierte
Polygonoberfläche mit einer anderen zu zerschneiden, bereits eingehend
beschäftigt (zum Beispiel [M86], [SLS99], [BKZ01]), insbesondere auch mit den
Problemen der numerischen Ungenauigkeiten bei algorithmischen Schnitttests.
Meistens wird vorrausgesetzt, dass beide Oberflächen Mannigfaltigkeiten
darstellen, da somit eine konsistente Begrenzung eines Volumens und eine klare
Unterscheidung zwischen Innen und Außen gewährleistet ist. Mannigfaltigkeiten
sind Flächen, die lokal euklidisch sind. Das heisst, zu jedem Punkt der Fläche
existiert eine Nachbarschaft, die topologisch einer Kreisscheibe entspricht.
In [M86] werden verschiedene Kombinationen von Oberflächenelementen
individuell geschnitten. Zuerst werden alle Kanten der beiden Oberflächen
gegeneinander geschnitten, dann die Kanten gegen die Punkte der jeweils
anderen Oberfläche und am Ende die Kanten gegen die Flächen der jeweils
anderen Oberfläche. Da für beide Oberflächen gefordert wird, dass diese
3D Mannigfaltigkeiten sein müssen, ergibt sich für jede der verschiedenen Arten
von Schnitten eine überschaubare Anzahl von möglichen topologischen
Operationen. Diese Unterteilung der Schitttests bringt jedoch eine gewisse
Unberechenbarkeit im Hinblick auf die numerische Genauigkeit, da
Toleranzwerte bei den verschiedenen Arten von Schnitttests unterschiedlich
einfließen und somit nicht direkt miteinander vergleichbar sind. Um diesem
Problem zu begegnen, werden sämtliche Schnitttests auf den Test, ob zwei
Punkte identisch sind, zurückgeführt. Die hier benutzte Toleranz beeinflusst alle
Schnitttests. Diese Methode ist jedoch nicht ausreichend um konsistente
Ergebnisse zu garantieren, deshalb müssen einige Spezialfälle, wie z.B.
koplanare Flächen gesondert behandelt werden.
10
2.3.2 Direktes Schneiden
Im medizinischen Bereich besteht ein großer Bedarf, komplexe chirurgische
Eingriffe zu planen bzw. zu üben. Dafür wurden im Gebiet CAS einige Systeme
entwickelt, die versuchen das Schneiden mit einem Skalpell am Computer zu
simulieren. Da dieses virtuelle Skalpell meistens mittels eines 3D-Eingabegeräts
interaktiv gesteuert wird, kann man von direkter Manipulation sprechen, was es
von dem in 2.3.1 beschriebenen Schneiden mit einen existierenden Fläche
unterscheidet. Diese Methode ist nicht nur im Gebiet CAS anwendbar, sondern
auch im allgemeinen CAD-Bereich.
Das direkte, interaktive Schneiden von Polygonoberflächen wurde unter anderem
in [BM02] theoretisch beschrieben. Dabei werden am Schnittwerkzeug eine oder
mehrere scharfe Kanten definiert. Diese erzeugen bei der Bewegung des
Schnittwerkzeugs Flächen, die als Schnittflächen für die Schnitt-Erkennung mit
der zu schneidenden Oberfläche dienen. Da sich [BM02] vorrangig mit EchtzeitInteraktion beschäftigt, wird das Schneiden entsprechend optimiert und vereinfacht. Es wird nicht global durchgeführt, sondern lediglich für einzelne primitive
Elemente wie Dreiecke. Die Topologie der Oberfläche wird dabei nicht bei jedem
Iterationsschritt verändert, sondern erst wenn das Werkzeug ein Element nach
dem Eintritt wieder verlassen hat.
11
3 Realisierung
3.1 Schneiden durch Einzeichnen von
Schnittkonturen
Im folgenden Kapitel wird die Methode der Schnittmodellierung
an Polygonoberflächen vorgestellt, die im Rahmen dieser Arbeit
implementiert wurde. Sie orientiert sich an traditionellen
Planungsmethoden aus der Chirurgie und verbindet die Vorteile
des Schneidens mit einer Schnittfläche mit denen vom interaktivem Schneiden durch direkte Manipulation der Oberfläche.
Eine weit verbreitete Methode der Chirurgieplanung, die bei Knochenschnitten
eingesetzt wird, ist das Einzeichnen von Schnittkonturen auf einem Kunststoffmodel des Patientenschädels. Der Schnitt wird durch das vorherige
Aufzeichnen planbarer. Eine Korrektur ist ohne weiteres möglich. Diese Art einen
Schnitt durch ein dreidimensionales Objekt zu definieren ist auch in anderen
Bereichen sowie im täglichen Leben ein häufig praktizierter Ansatz. Die Idee war,
diesen Ansatz auf ein virtuelles 3D-Model in Form einer triangulierten Polygonoberfläche zu übertragen. Der Benutzer zeichnet die Schnittkonturen auf der
Polygonoberfläche ein und legt damit fest, wie das Modell zerschnitten werden
soll. Durch einen Oberflächenschnitt würde allerdings auch nur die äußerste
Oberfläche zerschnitten werden. Möglicherweise vorhandene, innere Strukturen
blieben weiterhin verbunden und müssten gegebenenfalls durch erneutes
Zeichnen und Schneiden aufgetrennt werden.
Wenn also die Polygonoberfläche, die zerschnitten werden soll, innere Strukturen
enthält oder keine Mannigfaltigkeit ist, dann ist das Zerschneiden nur mit Hilfe
einer Schnittfläche möglich, die auch das Innere des Objektes durchtrennt.
Gleichzeitig soll diese Schnittfläche den äußersten Bereich der Polygonoberfläche so schneiden, wie es die darauf eingezeichnete Schnittkontur vorgibt. Die
Form der daraus resultierenden Schnittfläche ist damit jedoch keineswegs
eindeutig festgelegt, sondern wird durch das verwendete Schnittwerkzeug
bestimmt, so dass weitere Benutzereingaben nötig sind, um den gewünschten
Schnitt zu modellieren. Nach Generierung der Schnittfläche kann diese benutzt
werden um die Polygonoberfläche zu zerschneiden.
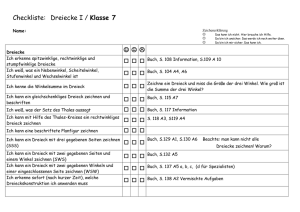
Die Schnittmodellierung gliedert sich damit in drei Arbeitsschritte, die in
Abbildung 4 dargestellt sind:
1. Einzeichnen der Schnittkontur auf der Oberfläche des Objektes, das
zerschnitten werden soll.
2. Ausgehend von einer Kontur wird eine Schnittfläche erzeugt, die von der
Kontur begrenzt wird.
3. Das Objekt wird mit Hilfe der resultierenden Schnittfläche zerschnitten.
Die drei genannten Arbeitsschritte sollten nach Vorgabe möglichst unabhängig
voneinander sein, so dass der Modellierungsvorgang flexibel gestaltet werden
kann. Zwischenergebnisse, wie die Schnittkontur oder die Schnittfläche, sollen in
einem separaten Format vorliegen. Dadurch ist es möglich diese Daten auch aus
einer anderen Quelle als dem vorangehenden Planungsschritt zu benutzen. Zum
12
Beispiel kann der Benutzer eine einfache Ebene als Schnittfläche benutzen, um
einen planaren Schnitt durchzuführen. Des weiteren können komplexe Schnittflächen auch analytisch berechnet werden oder aus einer vordefinierten Form
resultieren, die als individuelle Geometrie vorliegt.
Es soll möglich sein, alle Zwischenergebnisse abzuspeichern und als Eingabe für
andere Werkzeuge verwenden zu können. So ließen sich zum Beispiel Voxeldaten auf die Schnittfläche projizieren. Das würde insbesondere dann Sinn
machen, wenn die zu zerschneidende Oberfläche eine anatomische Struktur
darstellt und durch Segmentierung aus diesen Voxeldaten erzeugt wurde. Die
Projektion dieser Daten auf die Schnittfläche liefert dann zusätzliche Informationen über die zerschnittenen inneren Strukturen.
Abbildung 4: Schnittmodellierung durch Einzeichnen einer Schnittkontur
13
3.2 Amira als Entwicklungsplattform
Der praktische Teil dieser Arbeit wird im Rahmen der Visualisierungs-Umgebung Amira® implementiert. Daher wird in diesem
Kapitel Amira vorgestellt. Insbesondere wird auf die EntwicklerVersion von Amira eingegangen, die es ermöglicht, die Software
durch Implementierung eigener Module zu erweitern.
Die Software Amira wurde von der Abteilung für Wissenschaftliche Visualisierung
am Kondrad-Zuse-Zentrum in Berlin entwickelt [Amira]. Sie bietet Möglichkeiten
der Darstellung für verschiedene Arten von Daten, wie zum Beispiel:
Volumendaten, Polygonoberflächen, Vektorfelder und verschiedene Arten von
Gittern. Darüber hinaus bietet Amira Werkzeuge für die Segmentierung von
Volumendaten, der geometrischen 3D-Rekonstruktion sowie für die Bearbeitung
von Polygonoberflächen. Räumliche Tetraeder-Gitter, die als Basis für
physikalische Simulationen dienen, können automatisch generiert werden. Für
die 3D-Darstellung wird verfügbare Hardwarebeschleunigung durch Verwendung
von OpenGL und deren Erweiterungen genutzt, um maximale Frame-Raten zu
ermöglichen. Zu den Haupteinsatzgebieten von Amira gehören vor allem der
wissenschaftliche und der medizinische Bereich.
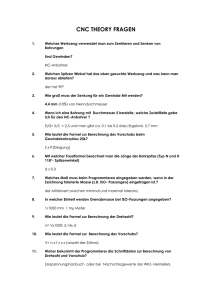
3.2.1 Das Modul-Konzept von Amira
Das Modul-Konzept von Amira bietet dem Benutzer eine sehr große Flexibilität.
Er hat die Möglichkeit eine Berechnungs- und Visualisierungspipeline zu
konstruieren, die ausgehend von den vorab genannten Daten, diverse
Berechnungen, sowie eine dreidimensionale Darstellung der Berechnungsergebnisse und deren interaktive Manipulation organisiert. Für diese Aufgabe
bietet Amira eine intuitiv zu bedienende grafische Oberfläche (siehe
Abbildung 6). Im object pool kann der Benutzer Module miteinander zu einem
Visualisierungs-Netzwerk verbinden. Die drei wichtigsten Arten von Modulen
sind:
•
Daten-Module repräsentieren Daten, wie triangulierte Polygonoberflächen, Volumendaten, Punktmengen, Vektor- oder Skalarfelder. Diese
werden von außen geladen oder direkt vom Programm erzeugt. Sie
können zum Beispiel das Ergebnis von einem Berechnungs-Modul sein.
•
Berechnungs-Module repräsentieren Berechnungen, die auf Daten
durchgeführt werden. Üblicherweise erhalten sie Daten-Objekte als Input
und liefern neue Daten als Output. Sie können jedoch auch das
ursprüngliche Daten-Objekt ändern (Editoren). Manche BerechnungsModule erlauben auch eine direkte Interaktion im Viewport.
•
Visualisierungs-Module sind für die Darstellung der Daten-Objekte
zuständig. Je nach Art der Daten werden andere Visualisierungs-Module
verwendet. Sie erhalten Daten-Objekte als Input, und erzeugen aus ihnen
Datenstrukturen, die für eine schnelle Darstellung optimiert sind.
14
Daten-Modul 1
Berechnungs-Modul
VisualisierungsModul 1
Daten-Modul 2
VisualisierungsModul 2
Abbildung 5: Beispiel für ein Amira-Netzwerk
Die Abbildung 5 zeigt ein Beispiel für ein Visualisierungs-Netzwerk. Das DatenModul 1, welches durch das Visualisierungs-Modul 1 dargestellt wird, dient als
Input für das Berechnungs-Modul. Dieses liefert als Ergebnis ein weiteres DatenModul 2, das über das Visualisierungs-Modul 2 dargestellt wird. Das Netzwerk
kann jederzeit durch Modifizieren, Hinzufügen oder Löschen von Verbindungen
(Objekten) verändert werden. Da das Netzwerk gerichtet ist, werden nach einer
Änderung nur die abhängigen Objekte aktualisiert. Ein Objekt kann auch
temporär deaktiviert werden. Dadurch werden alle von ihm abhängigen Objekte
ebenfalls inaktiv. Das gilt auch für die zugeordneten Visualisierungs-Module, so
dass deaktivierte Objekte nicht dargestellt werden. Bei der Darstellung ist eine
Kombination aus Surface- und Volume-Rendering möglich.
Abbildung 6: Amira im Einsatz
15
3.2.2 Amira erweitern
Das Modul-Konzept und die objektorientierte Implementierung von Amira
erlauben es, die Software auf einfache Art zu erweitern. Die Entwickler-Version
enthält bereits entsprechende Werkzeuge. Der Benutzer kann seine eigenen
Module implementieren, indem er von bereits vorhandenen Klassen ableitet.
Damit haben die neuen Module die notwendige Funktionalität um in Amira
problemlos integriert zu werden.
Für diese Arbeit wurden mehrere neue Berechnungs-Module implementiert. Die
Basisklasse für alle Berechnungs-Module ist HxCompModule, welche die
Methode compute() enthält. Diese Methode wird von Amira immer dann
aufgerufen, wenn ein Modul aktualisiert werden muss. Vom Benutzer
implementierte Berechnungs-Module müssen diese Methode überschreiben, um
entsprechende Berechnungen durchführen zu können. Ein Berechnungs-Modul
muss zudem sogenannte Ports bereitstellen, die den Input für die Berechnungen
liefern. Dazu gehören Daten-Ports, die im object pool Daten-Module mit einem
Berechnungs-Modul verbinden. Zur Eingabe von zusätzlichen Parametern dienen
weitere Ports, die durch GUI-Eingabefelder repräsentiert werden. Diese Eingabefelder werden angezeigt, wenn das Modul im object pool ausgewählt ist (siehe
Abbildung 6).
3.2.3 Benutzte Datenstrukturen
In diesem Abschnitt werden einige wichtige Datenstrukturen von Amira
vorgestellt, die bei der Implementierung dieser Arbeit verwendet wurden.
HxSurface repräsentiert eine triangulierte Polygonoberfläche. Der Kern der
Datenstruktur ist eine Liste von 3D-Punkten und eine Liste von Dreiecken.
Zusätzlich sind die Dreiecke in patches organisiert. Jeder patch stellt einen
Bereich der Oberfläche dar. In einer konsistenten HxSurface stellen diese
Bereiche für sich Mannigfaltigkeiten dar. Die Datenstruktur bietet zahlreiche
Methoden um zusätzliche Listen zu erzeugen, die Daten enthalten wie: DreiecksKanten, Dreiecks-Normalen und Patch-Konturen, sowie Informationen über die
Konnektivität der Oberflächen-Elemente. Die Klasse enthält auch Methoden um
die Oberfläche zu vereinfachen oder zu verfeinern.
HxLineSet repräsentiert einen oder mehrere räumliche Linienzüge (Polylines).
Es enthält eine Liste von 3D-Punkten und eine Liste von Linienzügen. Dabei
enthalten die Linienzüge Indizes, welche die Punktliste referenzieren. Zusätzlich
können für jeden Punkt beliebige Datenwerte gespeichert werden.
McVec3f repräsentiert einen 3D-Vektor, und stellt Operatoren für die üblichen
Vektor-Rechenoperationen wie zum Beispiel Addition, Vektorprodukt, Skalarprodukt und Normierung bereit. Diese Klasse wird von den meisten Datenstrukturen verwendet, die Geometrien repräsentieren.
McDArray<T> ist ein dynamisches Array, das Elemente eines beliebigen Typs
aufnehmen kann. McDArray wird von komplexeren Datenstrukturen wie
HxSurface und HxLineSet für deren Listen verwendet.
McOctree<T> ist eine Baumstruktur zur Speicherung räumlicher Objekte in
Abhängigkeit von ihrer Position im Raum. Sie wird oft benutzt, um SuchAlgorithmen zu optimieren. Der Raum wird solange sukzessiv unterteilt, bis in
16
jeder Region nur wenige Elemente enthalten sind. Die Elemente werden
entsprechend der Hierarchie der Regionen in den Baum eingefügt. Die Elemente
müssen eine Test-Methode bereitstellen, die prüft ob das Element eine 3D-Box
schneidet. Diese wird verwendet um das Element einer bestimmten Raumregion
zuzuordnen.
AdvFront2D ist eine Klasse, die den Advancing-Front-Algorithmus [L85] zur
Triangulation von komplexen Polygonen kapselt. Sie erlaubt es eine oder
mehrere 2D-Konturen anzugeben, so dass es möglich ist, Polygone mit Löchern
zu triangulieren. Wenn nötig erzeugt die Triangulations-Methode auch
zusätzliche Punkte innerhalb des Polygons.
17
3.3 Zeichnen auf Polygonoberflächen
Die Möglichkeiten für das Zeichnen von Linienzügen auf einer
triangulierten Polygonoberfläche werden erörtert. Die Interaktion
soll durch ein 2D-Eingabegerät, wie eine Maus oder ein
Zeichentablett, erfolgen. Das Zeichnen eines Linienzugs soll
unterbrechbar sein, um das Objekt drehen zu können. Dadurch
soll es möglich sein die Linienzüge über die gesamte Oberfläche
eines dreidimensionalen Objektes fortzusetzen.
3.3.1 Grundlagen
3.3.1.a Von 2D zu 3D
Zu den grundlegenden Linien-Zeichenfunktionen bei 2D-Grafiksoftware gehören
das Polygon-Zeichnen und das Freihand-Zeichnen. Beim Polygon-Zeichnen
definiert der Benutzer explizit Punkte auf der Zeichenfläche, die durch gerade
Liniensegmente verbunden werden. Auf diese Weise entsteht ein Linienzug. Die
Bezeichnung Polygon-Zeichnen entstand, weil am Ende der erste und der letzte
Punkt meistens ebenfalls mit einem Liniensegment verbunden werden, so dass
eine Polyline entsteht.
Abbildung 7: Polygon-Zeichnen
Beim Freihand-Zeichnen wird der gesamte Weg des Cursors auf der
Zeichenfläche in einen Linienzug umgewandelt. Die kontinuierliche Bewegung
des Eingabegeräts im realen Raum, wird vom System diskretisiert, so dass die
Anwendung nur eine endliche Zahl von Positionsänderungen erfasst. Die
Eingabe ist also wieder eine Menge von Punkten, die durch gerade Liniensegmente verbunden werden. Das Ergebnis ist wieder ein Linienzug, der
meistens deutlich mehr Punkte enthält, als bei der Definition von Linienzügen
mittels Stützstellen.
18
Abbildung 8: Freihand-Zeichnen
Diese beiden Techniken sollen von einer ebenen Zeichenfläche auf eine
gekrümmte Oberfläche, die in einem dreidimensionalen Raum eingebettet ist,
übertragen werden. Dabei werden 2D-Punkte zu 3D-Punkten, Verbindungslinien
zu Kurven.
Abbildung 9: Linienzug in 2D und Kurvenzug in 3D
Da die betrachteten Oberflächen jedoch durch Dreiecke approximiert werden,
sind die Kurven wieder Linienzüge. In Abbildung 10 sind die vom Benutzer
vorgegebenen Punkte als Rechtecke, und die durch Interpolation entstandenen
Punkte als Kreise dargestellt. Die ersteren können an beliebigen Punkte der
Oberfläche liegen, die letzteren immer auf Kanten oder Kanten-Endpunkten. Die
entscheidende Frage dabei ist, wie die Punkte verbunden werden sollen, also
wie diese interpolierenden Linienzüge definiert werden.
19
Abbildung 10: Kurvenzug in 3D wird zu Linienzug in 3D
3.3.1.b Punkte auf einer Polygonoberfläche verbinden
Im 2D-Fall werden die Punkte durch Linien, also auf dem kürzesten Weg
verbunden. Übertragen auf den 3D-Fall würde dies bedeuten, dass man den
kürzesten Weg zwischen zwei Punkten innerhalb einer Polygonoberfläche
suchen muss. Dieses Problem wurde bereits auf unterschiedliche Weise gelöst.
In [CH90] wird ein Algorithmus der Aufwandsklasse O(K2) vorgestellt, wobei K die
Anzahl der Kanten in der Polygonoberfläche ist. Bei approximativen Verfahren
wie [KS00] reduziert sich der Aufwand auf O(K log K). Der Rechenaufwand und
der Speicherbedarf für Hilfsdatenstrukturen ist bei allen Verfahren abhängig von
der Komplexität der gesamten Polygonoberfläche. Deren Verwendung ist daher
für das interaktive Zeichnen auf Oberflächen mit sehr vielen Dreiecken nur
bedingt geeignet. Dies gilt insbesondere für das Freihand-Zeichnen, wo sehr
viele, relativ kurze Abschnitte interpoliert werden müssen.
Im Folgenden wird ein lokales Verfahren vorgestellt, welches zwei Punkte V0, V1
innerhalb einer Polygonoberfläche S auf einem approximativ "kürzesten Weg"
verbindet. Der Aufwand ist O(k), wobei k die Anzahl der Kanten des gefundenen
Weges ist. Der Rechenaufwand ist also nicht von der Komplexität der gesamten
Polygonoberfläche abhängig. Damit ist interaktives Arbeiten auf beliebig
komplexen Oberflächen möglich.
Das Verfahren basiert auf einem Schnitt zwischen einer Polygonoberfläche S und
einer Ebene E, die die beiden zu verbindenden Punkte V0 und V1 enthält, und
möglichst orthogonal auf der Oberfläche steht. Um das zu erreichen werden die
beiden Normalen-Vektoren N0, N1 der Polygonoberfläche in den beiden Punkten
Vo, V1 betrachtet. Die beiden Normalen-Vektoren werden gemittelt, woraus sich
Nm ergibt. Die Schnittebene E(NE,δ) wird durch ihren Normalen-Vektor NE und
den Abstand zum Ursprung δ beschrieben. Die Ebene soll derart in den Raum
gelegt werden, dass sie Vo, V1 und Nm enthält (siehe Abbildung 12). Dies wird auf
folgende Weise erreicht:
NE =
( V0 − V1 ) × Nm
( V0 − V1 ) × Nm
δ = V0 • NE
20
Abbildung 11: Schnitt einer Kugel mit einer Ebene E
Die Abbildung 11 zeigt den Idealfall einer Kugeloberfläche. Hier entspricht der
Schnitt der Oberfläche S mit der Ebene E genau den beiden Geodäten W0, W1
zwischen V0 und V1, wobei W0 den kürzesten Weg zwischen den beiden Punkten
innerhalb von E darstellt.
Die Abbildung 12 zeigt den allgemeinen Fall. Hier sind N0, N1 und die Strecke
VoV1 nicht zwingend koplanar, daher definiert hier der gemittelte NormalenVektor Nm zusammen mit den Punkten Vo, V1. die Ebene E. Der Linienzug W, der
durch Schnitt zwischen E und der Fläche entsteht, stellt nicht zwingend die
kürzeste Verbindung zwischen Vo und V1 dar. Die weiteren Punkte von W neben
Vo und V1 sind als Kreise dargestellt. Sie entstehen durch einen Schnitt zwischen
den Kanten der Polygonoberfläche und der Ebene E. Wie der Schnittpunkt
zwischen einer Ebene und einer Kante berechnet wird ist in 3.5.1.c beschrieben.
21
Abbildung 12: Schnitt einer beliebigen Polygonoberfläche mit einer Ebene
Diese Interpolations-Methode liefert nicht immer ein Ergebnis, selbst wenn eine
Verbindung auf der Oberfläche existiert. Bei geschlossenen Oberflächen liefert
sie immer zwei mögliche Wege (siehe Abbildung 13a). Hier wird der kürzere
favorisiert. Bei Oberflächen mit geringer Varianz der Dreiecksgröße kann eine
Optimierung vorgenomen werden, bei der weniger Berechnungen nötig sind:
Statt die euklidische Länge der Wege zu vergleichen, vergleicht man nur die
Anzahl der durchschrittenen Dreiecke.
Abbildung 13: Mögliche Fälle des Schnitts mit einer Ebene.
a: zwei Wege, b: ein Weg, c: kein Weg gefunden
3.3.1.c Verfolgen von Wegen auf Nicht-Mannigfaltigkeiten
Die Polygonoberflächen, die in Amira durch HxSurface repräsentiert werden,
müssen keine Mannigfaltigkeiten darstellen. Für eine Polygonoberfläche
bedeutet dies, dass mehr als zwei Dreiecke eine gemeinsame Kante haben
können. An einer Kante eines Dreiecks können also mehrere Nachbardreiecke
anliegen.
22
Für die Schnittverfolgung bedeuten die daraus resultierenden Nachbarschaftsverhältnisse, dass mehrere mögliche Wege auf der Oberfläche existieren. Eine
Möglichkeit dieses Problem zu lösen wäre, alle möglichen Wege zu verfolgen
und anschließend den kürzesten zu wählen. Das Ziel ist allerdings, auf der
äußeren Oberfläche eines Objektes zu zeichnen. Der kürzere Weg zwischen
zwei Punkten, die beide auf der äußersten Oberfläche liegen, muss nicht
unbedingt ausschließlich außen verlaufen. Der Weg könnte eine "Abkürzung"
über einen inneren Flächenteil nehmen. Dies ist für die Anwendung nicht
erwünscht.
Abbildung 14: Mehre mögliche Wege auf Nicht-Mannigfaltigkeiten
Die Abbildung 14 zeigt ein Beispiel, in dem der kürzere Weg WI innen verläuft,
und daher nicht die erwünschte Verbindung zwischen V0 und V1 repräsentiert.
Um dies zu verhindern, und den äußersten, möglichen Weg (hier W0) zu finden,
muss man an den Weggabelungen lokal entscheiden welcher Weg außen
entlang führt.
Abbildung 15: Äußerer Winkel zwischen benachbarten Dreiecken
Die lokale Situation ist in Abbildung 15 dargestellt: Vom Dreieck Ti kommend
führt der Weg w über die Kante e. An der Kante liegen jedoch drei Nachbardreiecke Ta, Tb und Tc. Davon hat Ta den kleinsten äußeren Winkel zu Ti, daher
führt der Weg von Ti weiter über Ta. Wo außen ist wird dabei durch die Richtung
des Normalen-Vektors Ni von Ti definiert. Die Richtung von Ni wird durch die
23
Umlaufrichtung des Dreiecks Ti bestimmt, weil für die Berechnung der
Dreiecksnormalen, das Vektorprodukt zweier Dreieckskanten benutzt wird. Die
Kanten-Vektoren sind wiederum von der Reihenfolge der Dreieck-Punkte
abhängig Für die Berechnung des äußeren Winkels wird auch der NormalenVektor Nn des jeweiligen Nachbardreiecks Tn benötig. Bei der Berechnung von
Nn ist darauf zu achten, ob die Umlaufrichtungen der beiden Dreiecke konsistent
sind. Gegebenfalls wird die Richtung von Nn umgekehrt.
Abbildung 16: Berechnung des äußeren Winkels
Der in Abbildung 16 dargestellte äußere Winkel α wird folgendermaßen
berechnet:
δn = ( V3 − V0 ) • Ni
d = Ni • Nn
π − cos −1(d) für δn > 0
α=
−1
π + cos (d) für δn ≤ 0
Die lokale Heuristik, immer möglichst außen zu bleiben, macht es überflüssig
einen Baum, mit allen möglichen Wegen zu erzeugen. Sie kann jedoch in
gewissen Fällen auch ungeeignet sein. Wenn der Punkt V1 auf einem inneren
Flächenteil liegt, wird er niemals von einem Weg erreicht der nur außen verläuft.
Um diesem Problem zu begegnen, wird ausgenutzt, dass eine HxSurface aus
mehreren Patches bestehen kann. Entscheidend dabei ist, dass jeder Patch für
sich betrachtet eine Mannigfaltigkeit darstellt. Dadurch ergibt sich für eine
HxSurface, die keine Mannigfaltigkeit sein muß eine Unterteilung in Patches,
welche die Navigation auf der Oberfläche erleichtert. Diese Unterteilung ist in
Abbildung 17 dargestellt: Die Oberfläche besteht aus vier Patches P0 bis P3. Der
zu erreichende Punkt V1 liegt auf dem Patch P3, wodurch P3 zu einem
"bevorzugten" Patch wird. Bei der lokalen Entscheidung an einer Weggabelung
wird, wenn möglich, immer auf diesen bevorzugten Patch übergegangen. Nur
wenn keines der potenziellen Dreiecke auf dem bevorzugten Patch liegt, wird der
äußerste gewählt. Ohne dieses zusätzliche Kriterium würde die lokale Heuristik
den äußeren Weg W0 wählen, der den Punkt V1 verpasst.
24
Abbildung 17: Unterteilung in Patches bei Nicht-Mannigfaltigkeiten
3.3.2 Implementierung
Mit Hilfe der Interpolationsmethode, die im vorangehenden Abschnitt vorgestellt
wurde, wurde ein Zeichenwerkzeug für Polygonoberflächen entworfen. Basierend
auf dem Modulkonzept von Amira, wurde dafür ein neues Computational-Module
HxSurfaceContour entwickelt. Als Input bekommt das Modul ein Data-Module
vom Typ HxSurface, das die Polygonoberfläche, auf der gezeichnet werden soll,
repräsentiert. Falls noch nicht vorhanden, wird für die HxSurface ein DisplayModule vom Typ HxDisplaySurface erzeugt. Als Ergebnis liefert
HxSurfaceContour ein Data-Module vom Typ HxLineSet, welches die vom
Benutzer eingezeichnete Kontur darstellt. Für dieses Modul wird ein DisplayModule vom Typ HxDisplayLineSet erzeugt.
HxSurface
HxSurfaceContour
HxDisplaySurface
HxLineSet
HxDisplayLineSet
Abbildung 18: Von HxSurfaceContour benutzte Module
Während das HxSurfaceContour-Modul aktiv ist kann der Benutzer, mit Hilfe
des Cursors Punkte auf der angehängten HxSurface definieren. Diese werden
dann wie im vorangehenden Abschnitt beschrieben verbunden. Dazu wird
zunächst die Schnittebene E berechnet. Ausgehend vom Dreieck To in dem der
erste Punkt Vo liegt, wird der Schnitt der Ebene E auf der Polygonoberfläche S in
beide Richtungen gleichzeitig verfolgt (siehe Abbildung 19). Dabei untersucht der
Algorithmus jeweils die Kanten des aktuellen Dreiecks auf Schnitt mit der Ebene
E. Dies geschieht solange bis:
•
einer der Wege T1 erreicht ist und kürzer als der andere ist, oder
•
beide Wege in eine "Sackgasse" führen
Im zweiten Fall liefert die Interpolation kein Ergebnis. Der Benutzer muss einen
anderen Punkt definieren, der näher am vorherigen liegt. In Abbildung 19 erreicht
25
der linke Weg nach drei Schritten den Rand der Oberfläche. Der rechte Weg
erreicht nach sechs Schritten das Zieldreieck T1.
Abbildung 19: Verfolgen des Schnitts mit der Ebene auf der Polygonoberfläche
Nachfolgend ist der vereinfachte Pseudocode für die Schnittverfolgung
dargestellt. Als Input dienen die beiden zu verbindenden Punkte V0, V1 und die
Dreiecke T0, T1 auf denen diese liegen:
procedure verbindePunkte (V0 , V1 , T0 , T1) {
berechne E mit Hilfe von p 0 , p1 und der Normalen-Vektoren von T 0 , T1
kanteA, kanteB
:= finde beide Kanten von T 0 die E schneiden
dreieckA, dreieckB := T0
do {
dreieckA := gehe über kanteA ins Nachbardreick
kanteA
:= nächste Kante im dreieckA die E schneidet
dreieckB := gehe über kanteB ins Nachbardreick
kanteB
:= nächste Kante im dreieckB die E schneidet
} while
(T1 noch nicht durch kürzeren Weg erreicht) AND
(dreieckA oder dreieckB keine Sackgasse)
}
Der Übergang ins nächste Nachbardreieck über eine Kante geschieht unter
Berücksichtigung einer möglichen Aufteilung der Oberfläche. Wie in 3.3.1.c
beschrieben, wird bei Nicht-Mannigfaltigkeiten versucht den Patch, in dem T1
liegt zu erreichen. Falls dies lokal nicht möglich ist, wird versucht möglichst
außen auf der Oberfläche zu bleiben:
procedure geheInsNaechsteDreieck (T i , Tj, kante, endPatch) {
dreieckMinAngle := Nachbardreieck von kante mit kleinstem äusseren Winkel zu T i
dreieckEndPatch := Nachbardreieck von kante die auf den endPatch führt
if (dreieckEndPatch = NULL) {
Tj := dreieckEndPatch
}
else {
Tj := dreieckMinAngle
}
}
26
3.3.3 Ergebnisse und Ausblick
Die Abbildung 20 zeigt Beispiele für die verschiedenen Zeichentechniken.
Abbildung 20a zeigt eine Kontur, die durch Polygonzeichnen erstellt wurde. Der
Benutzer hat 10 Punkte auf der Oberfläche festgelegt, die auf dem approximativ
kürzesten Weg miteinander verbunden wurden. Abbildung 20b zeigt eine Kontur,
die durch Freihand-Zeichnen erzeugt wurde. Der Benutzer hat durch Ziehen der
Maus den gesamten Schriftzug festgelegt. Natürlich können innerhalb einer
Kontur auch beide Zeichentechniken im Wechsel eingesetzt werden.
Abbildung 20: a) Polygonzeichnen und b) Freihandzeichnen
Die Abbildung 21 zeigt noch mal die beiden Methoden im Detail. Abbildung 21a
zeigt einen einzelnen Abschnitt einer Kontur. Die schwarzen Punkte, die vom
Benutzer definiert wurden, liegen innerhalb von Dreiecken und markieren die
Endpunkte des Abschnitts. Die restlichen Punkte des Abschnitts liegen alle auf
Kanten. Sie entstanden durch Interpolation zwischen den beiden Endpunkten,
wie in 3.3.1.b beschrieben. Abbildung 21b zeigt einen Abschnitt, der durch
Freihand-Zeichnen erzeugt wurde. Der Weg den der Cursor zurückgelegt hat,
wurde an die Topologie der Oberfläche angepasst und damit vereinfacht. Die
Information über den Weg des Cursors innerhalb eines Dreiecks geht dabei
verloren und wird als gerades Segment interpoliert. Nur dort, wo der Cursor über
eine Kante bewegt wurde, wird auch ein Konturpunkt erzeugt. Trotzdem ist es
möglich innerhalb eines Dreiecks zu zeichnen, indem man die Punkte einzeln
festlegt (Polygon-Zeichnen).
27
Abbildung 21: a) Polygonzeichnen und b) Freihandzeichnen im Detail
Da das implementierte Interpolations-Verfahren sehr schnell ist, werden andere
Faktoren zu einem Flaschenhals bei der Performance. Insbesondere die
Projektion der 2D-Maus-Position auf die 3D-Oberfläche kann je nach Komplexität
der Szene sehr langsam sein. Dies kann sich besonders beim Freihand-Zeichnen
bemerkbar machen, weil hier bei jeder Cursor-Bewegung dessen Position auf die
Oberfläche projiziert werden muss. Falls dies zu lange dauert, werden
nachfolgende Mausbewegungen ignoriert, um eine Echtzeit-Interaktion zu
gewährleisten. Dadurch gehen möglicherweise Merkmale bei einem schnell
gezogenen Freihandzug verloren. Um dieses zu verhindern, gibt es die
Möglichkeit, die Projektionen nicht bei jeder Mausbewegung durchzuführen,
sondern erst beim Loslasen der Taste, wenn der Freihandzug in der
Bildschirmebene abgeschlossen wurde. Dann werden sämtliche Projektionen für
den Freihandzug auf einmal durchgeführt, was zu einer Verzögerung führt. Diese
unterdrückt allerdings keine Benutzer-Eingaben. Auf diese Weise ist es möglich,
auf sehr komplexen Oberflächen schnelle Freihand-Konturen zu zeichnen.
28
Bei der Implementierung der Projektion wurde auf eine Klasse von Open Inventor
zurückgegriffen:
SoRayPickAction.
Möglicherweise
bestehen
hier
Optimierungsmöglichkeiten. Optimal wäre eine 3D-Progammierumgebung, die
einen ID-Buffer bietet, der für jeden Bildschirmpunkt die ID des dort gezeichneten
vordersten Dreiecks enthält. Dies würde das zeitaufwändige Testen eines Strahls
auf Schnitt mit Dreiecksflächen in Projektions-Richtung ersparen.
Die in dieser Arbeit implementierte Interpolationsmethode ist zwar effizient liefert
aber nicht immer einen Weg zwischen zwei Punkten auf der Oberfläche. Für
diesen Fall könnte man eine andere, weniger effiziente aber zuverlässige
Methode implementieren, wie zum Beispiel die in [KS00] beschriebene
Approximation.
Um das Werkzeug flexibler zu machen, sollte es ermöglicht werden, die
Kontrollpunkte nachträglich über die Oberfläche zu bewegen. Dies sollte bequem
mit Hilfe der Maus möglich sein. Nach der Änderung eines Kontrollpunktes
müssten die beiden angrenzenden Segmente neu berechnet werden.
29
3.4 Triangulieren von Konturen
Ein geschlossener Linienzug im 3D-Raum soll mit einer
triangulierten Polygonoberfläche gefüllt werden. Verschiedene
Methoden der Triangulation werden dabei untersucht. Darunter
Regelflächen und Minimalflächen. Da die entstandene
Oberfläche als Schnittfläche dienen soll, werden auch die
Möglichkeiten einer Optimierung der Polygonoberfläche für
diesen Zweck erörtert.
3.4.1 Grundlagen
Da im Folgenden Regelflächen und Minimalflächen vorgestellt werden, werden
hier Eigenschaften von Oberflächen kurz erklärt, die in der Differential-Geometrie
eine wichtige Rolle spielen.
Die Krümmung K einer Kurve an einem Punkt ist der Kehrwert des KrümmungsRadius an diesem Punkt. Die Krümmung eines Kreisbogens, zum Beispiel, ist für
alle Punkte des Kreisbogens der Kehrwert des Kreis-Radius. Die Krümmung hat
ein Vorzeichen, das angibt in welche Richtung sich die Kurve krümmt.
An einem Punkt einer Oberfläche kann es verschiedene Krümmungen geben,
abhängig von dem Tangentenvektor entlang welchem die Krümmung der
Oberfläche betrachtet wird. Das Minimum und Maximum dieser Krümmungen an
einem Punkt sind die beiden Hauptkrümmungen K1 und K2.
Die Gauß-Krümmung KG der Oberfläche an einem Punkt ist das Produkt der
Hauptkrümmungen an diesem Punkt:
KG = K1 K 2
Die mittlere Krümmung KM der Oberfläche an einem Punkt ist das Mittel der
Hauptkrümmungen an diesem Punkt:
KM =
1
(K 1 + K 2 )
2
3.4.1.a Allgemeine Regelflächen
Regelflächen sind zur Modellierung von Schnittflächen interessant, weil sie das
Zerschneiden des Raumes mit einer starren Klinge darstellen. Regelflächen
entstehen durch Verschieben einer Linie entlang einer Kurve im Raum. Sei C(u)
eine durch u parametrisierte Kurve im R3, und E(u) ein Einheitsvektor, der sich
mit u kontinuierlich ändern kann, dann ist jede Fläche F, die sich durch
F(u, v ) = C(u) + vE(u)
beschreiben lässt, eine Regelfläche (siehe Abbildung 22).
30
Abbildung 22: Regelfläche
In Abbildung 23 sind zwei Beispiele für Regelflächen dargestellt, a) ein
Zylindermantel und b) ein Hyperboloid. Alle Oberflächen mit verschwindender
Gauß-Krümmung, wie der Zylinder- oder der Kegelmantel sind Regelflächen.
Nicht alle Regelflächen jedoch haben eine verschwindende Gauß-Krümmung
(siehe Hyperboloid); sie ist jedoch nie positiv.
Abbildung 23: Beispiele für Regelflächen (Zylindermantel, Hyperboloid)
3.4.1.b Diskrete Regelflächen
Um eine stückweise lineare Kontur mit endlich vielen Stützstellen mit einer
Regelfläche zu füllen, muss man nur endlich viele Positionen der erzeugenden
Linie betrachten. Diese Positionen werden jeweils durch zwei Punkte der Kontur
definiert. Die Vorgehensweise ist in Abbildung 24 dargestellt. Die Linie soll
zwischen den Punkten VS und VE bewegt werden. Da die Kontur oben weniger
Punkte hat als unten, werden dort Punkte (VN0 und VN1) gleichmäßig eingefügt,
ohne dass dabei die Form der Kontur verändert wird. Das Flächenstück zwischen
zwei aufeinanderfolgenden Linien wird jeweils durch zwei Dreiecke approximiert.
31
An den beiden Endpunkten der Regelflächen-Kontur
Abschlussdreieck eingefügt.
wird
jeweils
ein
Abbildung 24: Erzeugen einer triangulierten Regelfläche
Das gleichmäßige Einfügen von Punkten in einen Linienzug ist in Abbildung 25
dargestellt. Die neuen Punkte werden zunächst in gleichen Abständen über die
Länge des gesamten Linienzugs verteilt. Diese Verteilung dient dazu festzustellen, wie viele Punkte in welches Liniensegment eingefügt werden sollen.
Anschließend werden die neuen Punkte innerhalb ihrer Segmente gleichmäßig
verteilt. Da die ursprünglichen Punkte erhalten werden, und die neuen auf den
Segmenten liegen, bleibt die Form des Linienzuges erhalten.
Abbildung 25: Gleichmäßiges Einfügen von Punkten in einen Linienzug
3.4.1.c Allgemeine Minimalflächen
Minimalflächen sind Flächen, die bei einer gegebenen Kontur eine minimale
Oberfläche haben. Sie sind eine natürliche und im Hinblick auf die
32
Oberflächenspannung optimale Art eine Kontur zu füllen und entstehen in der
Natur unter anderem beim Seifenfilm, der eine geschlossene Drahtschlinge
überspannt, wenn man den Einfluss der Gravitation vernachlässigt.
Minimalflächen sind nicht unbedingt geeignet, einen Schnitt mit starrer Klinge zu
modellieren, weil sie im Allgemeinen, anders als die Regelflächen, nicht durch
Verschieben einer Linie im Raum erzeugbar sind. Die einzigen Ausnahmen, also
Minimalflächen, die auch Regelflächen sind, sind die Ebene und der Helicoid. Der
Helicoid ist die Minimalfläche zu einer Helix-Kontur.
Minimalflächen haben überall eine verschwindende mittlere Krümmung. Daraus
folgt, dass die Gauß-Krümmung, wie bei Regelflächen, nirgendwo auf der
Minimalfläche positiv ist. Die Kugeloberfläche ist in diesem Sinne also keine
Minimalfläche. Sie stellt zwar bei einem gegebenen Volumen die minimale
Oberfläche dar, aber es gibt keine Kontur, für die eine Kugeloberfläche oder ein
Teil davon die minimale Oberfläche darstellt.
Die Berechnung einer Minimalfläche zu einer beliebigen Kontur ist deutlich
schwieriger als bei einer Regelfläche. Ausgehend von einer durch u und v
parametrisierten Initialfläche S muss deren Oberflächen-Funktion
A (S) = ∫ Tu × Tv du dv
S
minimiert werden, wobei Tu und Tv Tangenten-Vektoren am Punkt (u,v) für die
Richtungen u und v sind [W99]. Dies erweist sich jedoch im allgemeinen Fall als
schwierig. In [R30] und [D31] wird gezeigt dass man alternativ dazu auch eine
Energiefunktion der Oberfläche, die durch das Dirichlet-Integral
E D (S ) =
2
1
∇S du dv
∫
2S
definiert wird, minimieren kann, wobei ∇S der Gradient von S ist.
3.4.1.d Diskrete Minimalflächen
Aufbauend auf den in 3.4.1.c beschriebenen Ansatz für die Minimierung einer
parametrisierten Minimalfläche, wird in [PP93] ein Verfahren vorgestellt,
triangulierte Polygonoberflächen zu minimieren. Die Energiefunktion wird lokal für
einzelne Punkte und deren direkte Umgebung definiert. Dabei wird ausgenutzt,
dass eine Minimalfläche auch lokal minimal ist. Das heißt, dass kleine
Änderungen, die den Oberflächeninhalt der gesamten Oberfläche erhöhen, auch
den Oberflächeninhalt ihrer lokalen Umgebung erhöhen.
Eine sehr einfache Methode, eine Polygonoberfläche approximativ zu minimieren
ist es, die Kantenlängen zu minimieren. Diese Methode imitiert einen Seifenfilm,
bei dem sich benachbarte Moleküle gegenseitig anziehen und so eine
Kontraktion der Filmoberfläche auf die Minimalfläche bewirken. Bei der
Polygonoberfläche sind es benachbarte Punkte, die sich anziehen wobei die
Kanten die Kräfte übertragen (siehe Abbildung 26). Die Kanten wirken als Federn
mit der Normallänge Null in einem Masse-Feder-Model mit sehr starker
Dämpfung.
33
Abbildung 26: Masse-Feder-Modell auf einer Polygonoberfläche
Für diese Minimierungs-Methode ist eine gute und reguläre, initiale Triangulation
erforderlich. Ideal ist eine Topologie mit sechs Dreiecken an jedem inneren
Punkt. Bei einer geschlossenen Kontur mit kompakten Proportionen kann man
dies erreichen, indem man ein Hexagon sukzessive verfeinert (siehe
Abbildung 27). Dabei werden neue Randpunkte an die Kontur angepasst. Dies
wird solange wiederholt bis der Rand der Polygonoberfläche vollständig mit der
Kontur übereinstimmt.
Abbildung 27: Verfeinerung einer Polygonoberfläche
Die Minimierung der Oberfläche wird iterativ durch eine Euler-Integration
vorgenommen. In jedem Iterationsschritt werden die angreifenden Kräfte für
34
jeden Punkt V berechnet. Dies kann zum Beispiel nach dem Hooke'schen Gesetz
erfolgen, wo die Kraft proportional zur Auslenkung einer Feder ist, die hier der
Kantenlänge entspricht. Die Kraft, die ein Nachbarpunkt Xi auf V ausübt ist dann
Fi = d X i − V
wobei d ein Faktor ist, welcher der Federkonstante entspricht. Die Summe aller
Kräfte, die am Punkt V angreifen ist
FR =
N
∑F
i=1
i
wobei N die Anzahl der Nachbarpunkte von V ist. Bei einer sehr starken
Dämpfung kann die Geschwindigkeit der Punkte immer als 0 angenommen
werden. Sie verlieren zwischen den Iterationsschritten quasi ihre gesamte
Geschwindigkeit. Die Masse aller Punkte ist gleich und kann zur Vereinfachung
den Betrag 1 haben. Damit entspricht die Verschiebung des Punktes der
resultierenden Kraft FR. Die neue Position V(t+1) des Punktes V ist gegeben
durch
V (t + 1) = V (t ) + FR
Diese Vereinfachungen reduzieren die Zahl der Berechnungen und erhöhen
damit die Effizienz. Durch den Parameter d hat man immer noch genug Kontrolle
über die Genauigkeit der Simulation. Die Iteration wird abgebrochen, wenn sich
die Oberfläche zwischen den Iterationsschritten kaum noch ändert. Hier empfiehlt
sich die maximale von allen resultierenden Kräften Fmax in aufeinander folgenden
Iterationsschritten zu vergleichen. Wenn
Fmax ( t + 1) − Fmax ( t ) < ε
gilt, hat sich offensichtlich ein Gleichgewicht der Kräfte eingestellt. An dieser
Stelle wird die Iteration abgebrochen. Die Größe ε bestimmt die Genauigkeit der
Approximation.
3.4.1.e Weitere Methoden der Triangulation einer Kontur
Eine weitere Möglichkeit eine Kontur zu triangulieren ist es ein 2DTriangulationsverfahren zu verwenden. Dazu muss die 3D-Kontur in ein 2DKoordinatensystem transformiert werden, wo sie trianguliert wird. Anschließend
wird die Triangulation wieder zurück in den 3D-Raum transformiert. Das Problem
hierbei ist es, eine sinnvolle, allgemeingültige Transformation der Kontur von 3D
nach 2D zu finden. Bei relativ "flachen" Konturen wäre folgender Ansatz sinnvoll:
1. Finde die Richtung der geringsten Varianz der Konturpunkte
2. Projiziere die Konturpunkte auf eine Ebene, die orthogonal zu der
Richtung der geringsten Varianz liegt.
Es ist jedoch offensichtlich, dass es Konturen gibt bei denen die Varianz in allen
Richtungen ausgeglichen ist. Die Ebene wäre dann relativ zufällig, und die
Projektion nicht brauchbar. Insbesondere würden immer wieder Fälle auftreten,
wo sich die projizierte 2D-Kontur selbst schneidet.
35
Um die Transformation in den 2D-Raum zu umgehen, kann man auch ein 2DTriangulationsverfahren so anpassen, dass man damit eine 3D-Kontur
triangulieren kann. Im Rahmen dieser Arbeit wurde dies für die Ear-CuttingMethode [M75] gemacht. Diese Methode ist für den 2D-Fall unter 3.5.1.g näher
beschrieben.
Abbildung 28: Triangulation durch Ear-Cutting
Der Ablauf der Ear-Cutting-Methode ist für den 2D-Fall in Abbildung 28
schrittweise dargestellt. In einem noch nicht triangulierten Restpolygon (initial das
gesamte Polygon, in Abbildung 28 schattiert) wird ein "Ohr" gesucht. Das ist ein
Eckpunkt pE des Restpolygons mit den Nachbarpunkten pE-1 und pE+1, der
folgende Bedingungen erfüllt:
1. pE ist ein konvexer Eckpunkt des Restpolygons. Das heißt der innere
Winkel zwischen den Kanten des Eckpunktes ist kleiner als π
2. Die Kante pE-1pE+1 schneidet keine Kanten des ursprünglichen Polygons
3. Das Dreieck pE-1pEpE+1 enthält keine Punkte des ursprünglichen Polygons
Wenn so ein Eckpunkt gefunden wird, dann wird er abgeschnitten: Das Dreieck
pE-1pEpE+1 wird zu der Triangulation hinzugefügt. Der Punkt pE wird aus dem
Restpolygon entfernt. Dies wird für das Restpolygon wiederholt, bis es nur noch
drei Punkte enthält. Damit ist die Triangulation abgeschlossen.
Der entscheidende Punkt der Ear-Cutting-Methode ist das Auffinden des
nächsten "Ohres". Zusätzlich zu den drei vorher genannten Bedingungen kann
die Qualität der Triangulation durch weitere Kriterien für ein "Ohr" verbessert
werden. So ist es sinnvoll zuerst Eckpunkte mit einem kleineren inneren Winkel
abzuschneiden. Alternativ kann auch die Qualität des neu entstehenden Dreiecks
pE-1pEpE+1 als Kriterium benutzt werden. In [EET93] wird eine Methode
vorgestellt, die das Auffinden des nächsten "Ohres" effizienter gestaltet.
36
Im Vergleich zu einem 2D-Polygon gibt es bei einer 3D-Kontur zwei wesentliche
Unterschiede beim Auffinden der nächsten abzuschneidenden Ecke (Ear):
1. Die Entscheidung, welcher der innere Winkel an einem Konturpunkt ist,
ist schwieriger. Hier wird eine zusätzliche Information benötigt, die
Auskunft darüber gibt, wo bei der Kontur innen und wo außen ist. Wenn
die Kontur, wie in 3.3 beschrieben, durch Zeichnen auf einer
Polygonoberfläche entstanden ist, zeigen die Normalen dieser
Polygonoberfläche auch die Außenseite der Kontur an.
2. Die beim Abschneiden einer Ecke entstehende neue Kante wird in 3D
selten andere Kanten der Kontur exakt schneiden. Trotzdem könnte es
sinnvoll sein, sie auf die Nähe zu anderen Kanten zu untersuchen und
dies als Kriterium für das Abschneiden der Ecke zu benutzen.
Wenn die zusätzliche Information über die Normale Ne der Kontur am Eckpunkt
Ve vorhanden ist, kann der innere Winkel αe leicht berechnet werden. Seien Ve-1
und Ve+1 die beiden Nachbarpunkte von Ve. Dann gilt
cos −1 (K e −1 • K e +1 )
wenn (K e −1 + K e +1 ) • Ne < 0
αe =
−1
π + cos (K e−1 • K e +1 ) wenn (K e −1 + K e +1 ) • Ne ≥ 0
wobei Ke-1 und Ke+1 die beiden normierten Kanten-Vektoren sind:
K e −1 =
Ve−1 − Ve
Ve−1 − Ve
K e +1 =
Ve+1 − Ve
Ve+1 − Ve
Der innere Winkel αe ist, wie auch im 2D-Fall, das entscheidende Kriterium für
das Abschneiden einer Ecke. Wenn αe > π ist, dann ist die Ecke konkav und darf
nicht abgeschnitten werden. Je kleiner αe ist, desto besser eignet sich die Ecke
zum Abschneiden. Die Triangulation verläuft wie in Abbildung 28 dargestellt.
3.4.1.f Expansion der Oberfläche
Die durch Triangulation einer Kontur entstandene Fläche soll als Schnittfläche
verwendet werden können. Dafür ist es sinnvoll die Fläche über die Kontur
hinaus zu expandieren. Dies ist besonders dann notwendig, wenn die Kontur
genau auf der Oberfläche liegt, die zerschnitten werden soll. In diesem Fall
würde eine nur innerhalb der Kontur liegende Schnittfläche die zu schneidende
Oberfläche lediglich berühren. Dies ist für die Berechnung eines Schnitts
zwischen den beiden Oberflächen ungünstig, weil bei Schnitttests Fehler durch
die numerische Ungenauigkeit wahrscheinlicher werden. Um diese Fehler zu
vermeiden, reicht bereits eine kleine Expansion der Schnittfläche, so dass diese
die zu schneidende Oberfläche durchdringt.
Das Problem eine Schnittfläche zu expandieren besteht darin ihre Randpunkte
so zu verschieben, dass:
1. die Randpunkte der Schnittfläche alle außerhalb der zu schneidenden
Oberfläche liegen
37
2. der Schnitt zwischen der zu schneidenden Oberfläche und der
Schnittfläche möglichst der ursprünglichen Kontur entspricht
3. die Schnittfläche nicht wesentlich deformiert wird und keine
Selbstdurchdringungen entstehen
Forderung 1 impliziert, dass man die nach außen zeigenden Normalen der zu
schneidenden Oberfläche als Expansionsrichtung benutzt. Forderung 2 verlangt,
dass die Expansionsrichtung lokal möglichst koplanar zu der Schnittfläche ist.
Nur dann bleibt die ursprüngliche Kontur nah an der Schnittfläche. Da die
Schnittfläche nicht überall senkrecht auf der zu schneidenden Oberfläche steht,
lassen sich diese zwei Forderungen im Allgemeinen nicht zugleich erfüllen. Aus
Forderung 3 resultiert, dass benachbarte Randpunkte möglichst einheitlich
verschoben werden müssen.
Während die Normalen der zu schneidenden Oberfläche eine eindeutige
Richtung für jeden Konturpunkt definieren, ist die Forderung nach einer
Verschiebung möglichst koplanar zu der Schnittfläche nicht eindeutig. An einem
Randpunkt liegen im Allgemeinen mehrere Dreiecke, die nicht koplanar
zueinander sind. Die Ebenen dieser Dreiecke müssten gemittelt werden, um eine
Ebene zu erhalten, die die Ausrichtung der Schnittoberfläche an einem
Randpunkt approximiert.
Eine einfachere Methode die Ausrichtung zu approximieren ist es, alle Kanten an
dem Randpunkt als Vektoren zu addieren. Auf diese Weise erhält man einen
Verschiebungs-Vektor, der die Forderung 2 sehr gut erfüllt. In Abbildung 29 wird
die Richtung dieser Kantensumme für den Randpunkt Vr durch den Vektor S
dargestellt. Um sicher zu stellen, dass der Randpunkt nicht seitlich, sondern
direkt nach außen von der Kontur weg, verschoben wird, wird die Verschiebung
auf die Symmetrieebene Eh beschränkt. Diese Symmetrieebene ist dadurch
gekennzeichnet, dass sie zu beiden Nachbarsegmenten von Vr den gleichen
Winkel hat. Der Vektor S wird auf die Ebene Eh projiziert wodurch man die
zentrierte Kantensumme Sh erhält. Diese zentrierte Kantensumme befriedigt die
Forderungen 2 und 3. Um sicher zu stellen, dass auch Forderung 1 erfüllt wird,
sollte die zentrierte Kantensumme mit der Normalen der zu schneidenden
Oberfläche verglichen werden. Falls der Winkel zwischen den beiden größer als
π ist, ist die zentrierte Kantensumme zu negieren, und das Ergebnis als
Verschiebungs-Richtung zu nutzen.
38
Abbildung 29: Zentrierte Kantensumme
Im Folgenden wird die Berechnung der Verschiebung für einen Randpunkt Vr
genauer beschrieben. Seien X1 ... XN die N Nachbarpunkte von Vr, dann ist die
Kantensumme von Vr gegeben durch
N
S = ∑ Vr − Xi
i =1
Der Normalen-Vektor der Symmetrieebene Eh ist
Nh =
Z 0 + Z1
Z 0 + Z1
wobei Z0 und Z1 die normierten Randkanten-Vektoren sind, die an Vr anliegen:
Z0 =
Vr −1 − Vr
Vr −1 − Vr
Z1 =
Vr +1 − Vr
Vr +1 − Vr
Die zentrierte Kantensumme ist dann
Sh = S − (S • Nh ) Nh
Das Vorzeichen des Verschiebungs-Vektors wird durch den Normalen-Vektor Nr
der zu schneidenden Oberfläche bestimmt.
39
S
S ′h = h
− S h
wenn S h • N r ≥ 0
wenn S h • N r < 0
Der Betrag δ des Verschiebungs-Vektors ist für alle Randpunkte gleich. Die neue
Position des Randpunktes ist dann
Vr′ = Vr + δ
S′h
S′h
Damit kann die Schnittfläche gleichmäßig expandiert werden.
3.4.1.g Hinzufügen eines Rands zu der Oberfläche
Die in 3.4.1.f beschriebene Expansion der Oberfläche liefert nicht immer eine
brauchbare Schnittfläche. Insbesondere wenn die Schnittfläche und die zu
schneidende Oberfläche im Schnittbereich koplanar sind, oder die zu
schneidende Oberfläche konkav ist, ist das Schneiden schwierig und liefert oft
inkonsistente Ergebnisse. Es kann sein, dass es trotz der Expansion zu keinem
eindeutigen oder zu einem ungewollt mehrfachen Schnitt zwischen den Flächen
kommt (siehe Abbildung 30b, SC ist die Schnittfläche).
Abbildung 30: Methoden eine Schnittfläche SC zu optimieren
Eine Alternative zum Expandieren der Schnittfläche ist das Hinzufügen eines
Randes, der die zu schneidende Oberfläche optimal schneidet (siehe
Abbildung 30c). Um das sicher zu stellen, steht dieser Rand senkrecht auf S,
wobei er nach außen, also in Richtung der Normalen von S "wächst". Der
ursprüngliche Rand von SC wird etwas in die andere Richtung verschoben, so
dass er ins Innere der Oberfläche S gerät. Die äußerste Oberfläche von S wird
nun durch den Rand von SC geschnitten, während der Rest von SC nur dazu
dient mögliche innere Strukturen von S zu zerschneiden.
40
3.4.2 Implementierung
Das Triangulieren einer Kontur wurde mit dem Computational-Module
HxContourTriangulator implementiert. Als Input wird ein HxLineSet erwartet,
welches die zu triangulierende Kontur repräsentiert. Diese ist das Ergebnis von
HxSurfaceContour. Als Ergebnis liefert das Modul eine HxSurface, die
Oberfläche, die von der Kontur begrenzt wird. Falls nötig werden für die
Darstellung beider Data-Modules entsprechende Display-Modules erzeugt.
HxLineSet
HxContourTriangulator
HxDisplayLineSet
HxSurface
HxDisplaySurface
Abbildung 31: Von HxContourTriangulator benutzte Module
Die Art der Triangulation (Regel-, Minimalfläche, Ear-Cutting- Triangulation) wird
vom Benutzer vorgegeben. Je nach Triangulations-Methode stehen
unterschiedliche Optionen zur Verfügung:
3.4.2.a Erzeugung von Regelflächen
Zur Erzeugung einer Regelfläche, wie in 3.4.1.b beschrieben, wird neben der
Kontur noch die Information über den Start- und Endpunkt benötigt (siehe
Abbildung 24). Anschließend wird die Zahl der Punkte zwischen Start- und
Endpunkt auf beiden Seiten der Kontur angeglichen. Dies geschieht durch
Einfügen von zusätzlichen Punkten auf der Seite mit weniger Stützstellen (siehe
Abbildung 25). Im ungünstigsten Fall verdoppelt sich dadurch die Zahl der
Konturpunkte. Die Triangulation ist nun trivial. Die Anzahl der Dreiecke ist n-2,
wobei n die Anzahl der Konturpunkte nach dem Einfügen der zusätzlichen
Punkte ist.
3.4.2.b Erzeugung von Minimalflächen
Die Erzeugung einer Minimalfläche besteht aus zwei Schritten:
•
Erzeugen eines Hexagons, als initiale Fläche, das den Schwerpunkt der
Kontur als Mittelpunkt hat und sukzessive unterteilt wird.
•
Minimieren der Oberfläche
Die initiale Triangulation ist ein Hexagon, welches aus 6 Dreiecken besteht und
wie in Abbildung 27 dargestellt verfeinert wird. Für diese Verfeinerung wird die
Methode refine() von HxSurface mehrfach aufgerufen. Bei jeder Verfeinerung
wird jedes Dreieck der Oberfläche in vier ähnliche Dreiecke unterteilt. Die Zahl
der Randpunkte verdoppelt sich bei jeder Verfeinerung, wobei die neuen
Randpunkte auf passende Konturpunkte verschoben werden, so dass sich der
Rand der Oberfläche immer mehr der Kontur anpasst. Wenn sämtliche
Konturpunkte durch Oberflächen-Randpunkte abgebildet sind, kann die
Verfeinerung abgebrochen werden. Dem Benutzer ist es auch möglich eine
41
andere Anzahl der Verfeinerungsschritte einzustellen. Die Oberfläche enthält 6⋅2n
Dreiecke, wobei n die Zahl der Verfeinerungsschritte ist.
Die Funktionsweise der Minimierung wurde im Grundlagenabschnitt 3.4.1.d
bereits erklärt. Nachfolgend ist der Pseudo-Code der entsprechenden Prozedur
gezeigt:
procedure minimiereOberfläche () {
maxKraft := 0;
eps := eine kleine Zahl;
while (maxKraft > eps) {
for (Kanten k) {
berechne die Kräfte die k auf ihre Endpunkte ausübt
addiere die Kräfte zu den Kräftesummen der beiden Endpunkte
}
maxKraft:= 0;
for (Punkte p) {
verschiebe p in Richtuung seiner Kräftesumme
if (maxKraft < verschiebung von p) {
maxKraft:= Betrag der Verschiebung von p
}
}
}
}
Da die Minimierung der Oberfläche mehrere Sekunden dauern kann, wird sie
nicht bei jeder Aktualisierung des Moduls durchgeführt, sondern nur auf
Aufforderung durch den Benutzer.
3.4.2.c Ear-Cutting-Triangulation
Bei der Triangulation durch Ear-Cutting kann der Benutzer zwischen zwei
Kriterien für das Finden des nächsten "Ohres" wählen:
•
möglichst kleiner innerer Winkel an einem Kontur-Punkt
•
möglichst gute Qualität des neuen Dreiecks.
Durch einen Slider ist es möglich, stufenlos zwischen den beiden Kriterien zu
gewichten und damit festzulegen, wie die allgemeine Qualität eines "Ohres"
berechnet wird. Die Methode sieht vereinfacht dargestellt folgendermaßen aus:
procedure earCuttingTriangulation (polygon) {
restPolygon := polygon
berechne alle Dreiecks-Qualitäten und Winkel im restPolygon
while (anzahl der Punkte im restPolygon > 2) {
for (alle Punkte p im restPolygon) {
berechne die Ear-Qualität für p
}
entferne den Punkt n mit der besten Ear-Qualität aus dem restPolygon;
füge das Dreieck aus n und seinen Nachbarn zu der Triangulation;
berechne die Dreiecks-Qualitäten und Winkel für die Nachbarn von n;
}
}
42
3.4.2.d Expansion und Rand
Sowohl die Expansion der Oberfläche als auch das Hinzufügen des Randes
werden nach der eigentlichen Triangulation durchgeführt. Die beiden Methoden
inflateSurface() und addMargin() können dabei auf jeder HxSurface arbeiten,
die nur einen Rand hat. Die beiden Operationen können also auf jede der drei
Oberflächenarten angewandt werden.
Da beide Methoden als zusätzliche Information die Normalen aus der Kontur
benötigen, müssen diese extrahiert und den Randpunkten der Oberfläche
zugeordnet werden. Bei Regel- und Minimalflächen werden in die ursprüngliche
Kontur Punkte eingefügt. Für diese Punkte müssen die Normalen an den
benachbarten Konturpunkten interpoliert werden.
43
3.4.3 Ergebnisse und Ausblick
Die Abbildung 32 zeigt Flächen, die mit dem HxContourTriangulator-Modul
erzeugt wurden. Die Kontur wurde analytisch mit Hilfe einer trigonometrischen
Funktion erzeugt und zeichnet sich durch eine sehr gleichmäßige Verteilung der
143 Punkte aus. Die dargestellten Oberflächen bestehen jeweils aus 142
(Regelfläche), 6144 (Minimalfläche) und 141 (Ear-Cutting) Dreiecken.
Abbildung 32: Beispiel für eine a)Kontur gefüllt durch eine b)Regelfläche,
c)Minimalfläche und d)Ear-Cutting-Triangulation
Die Abbildung 33 zeigt ein Beispiel, das näher an der Praxis der Anwendung
liegt. Die Kontur ist mit Hilfe des HxSurfaceContour-Moduls erzeugt worden. Sie
wurde auf einer Polygonoberfläche eingezeichnet und enthält 117 Punkte. Bei
den dargestellten Flächen sind die Kanten hervorgehoben. Die Flächen bestehen
jeweils aus 130 (Regelfläche), 6144 (Minimalfläche) und 115 (Ear-Cutting)
Dreiecken.
44
Abbildung 33: Beispiel 2 für eine a)Kontur gefüllt durch eine b)Regelfläche,
c)Minimalfläche und d)Ear-Cutting-Triangulation
Die verschiedenen Methoden für die Optimierung des Rands einer Schnittfläche
sind im Detail in Abbildung 34 dargestellt. Abbildung 34a zeigt die OriginalSchnittfläche innerhalb der zu zerschneidenden Oberfläche. Der Rand der
Schnittfläche liegt exakt in der zu zerschneidenden Oberfläche. In Abbildung 34b
wurde die Schnittfläche expandiert, so dass ihr Rand über die zu zerschneidende
Oberfläche hinausragt (siehe 3.4.1.f). In Abbildung 34c wurde die Schnittfläche
durch einen zusätzlichen Rand erweitert (siehe 3.4.1.g).
45
Abbildung 34: Beispiele für die Expansion der Schnittfläche (b) und Hinzufügen
eines Rands (c)
Die implementierten Verfahren sind gut für regelmäßige Konturen geeignet.
Neben den drei Arten von Flächen könnte man auch weitere implementieren.
Insbesondere flexiblere Versionen der Regel- und Minimalflächen würden Sinn
machen. Zur Zeit arbeiten diese beiden Algorithmen nur bei regelmäßigen
Konturen zuverlässig.
Bei Konturen mit vielen konkaven Bereichen, werden diese oft von der
Regelfläche verdeckt, wenn die verschobene Linie, welche die Regelfläche
erzeugt, unter einem kleinen Winkel zur Kontur steht. Ein Beispiel ist in
Abbildung 35a dargestellt: Die Regelfläche in dieser relativ flachen Kontur ist
zwar korrekt, wegen ihrer Faltung jedoch wahrscheinlich nicht das gewünschte
Ergebnis. Der dunkle Bereich in Abbildung 35a zeigt wo die Oberfläche zu weit
über die Kontur hinausgeht oder Teile der Oberfläche dicht beieinander liegen
und sich möglicherweise schneiden. Um dieses Problem zu vermeiden, müsste
man den Anspruch aufgeben, die gesamte Fläche mit einer verschobenen Linie
zu erzeugen. Stattdessen würde man eine Oberfläche aus mehreren
Regelflächen zusammensetzen. Ein Beispiel wie dies aussehen könnte ist in
Abbildung 35b dargestellt: Der dunkle Bereich wurde bei der Triangulation
zunächst ausgelassen, und anschließend individuell trianguliert. Das Problem
46
besteht nun darin, solche Bereiche zu erkennen, was anders als im 2D-Fall, bei
3D-Konturen nicht eindeutig ist. Als Kriterium könnte der Winkel zwischen zwei
benachbarten Dreiecken der Oberfläche dienen, der nicht zu groß werden darf
um Faltungen zu verhindern.
Abbildung 35: Regelflächen in konkaven Konturen
Bei der aktuellen Implementierung der Minimalflächen gibt es ebenfalls noch
Verbesserungsbedarf. Insbesondere die initiale Triangulation als regelmäßiges
Polygon (Hexagon) orientiert sich an kreisförmigen Konturen. Um die
Minimalflächen besser an unregelmäßige Konturen anzupassen, müsste man
eine adaptive Methode der Triangulation einsetzen. Diese sollte während der
Minimierung die Topologie modifizieren, um die Dreiecks-Qualität zu erhalten.
47
3.5 Schneiden von Polygonoberflächen
Eine triangulierte Polygonoberfläche soll von einer triangulierten
Schnittfläche zerschnitten werden. Das Problem wird auf der
Ebene einzelner Dreiecke formuliert, um es unabhängig von der
Gesamtkomplexität der Polygonoberflächen auf möglichst
wenige Fälle, die dabei theoretisch auftreten können, zu
reduzieren.
3.5.1 Grundlagen
3.5.1.a Der allgemeine Schnitt zweier Oberflächen
Man kann Oberflächen als Mengen von Punkten im R3 betrachten. Seien S und
SC zwei Oberflächen im R3. So ist der Schnitt S∩SC zwischen S und SC definiert
als die Menge aller Punkte V∈R3, die sowohl auf S wie auch auf SC. liegen:
S ∩ S C = { V V ∈ S ∧ V ∈ SC }
Abbildung 36: Der Schnitt zweier Oberflächen
Unter Umständen kann es sein, dass der Schnitt die Oberfläche S in zwei oder
mehr getrennte Bereiche Pi unterteilt (siehe Abbildung 37). Zwei getrennte
Bereiche Pn und Pm sind dadurch gekennzeichnet, dass es keinen Weg W
zwischen einem Punkt V0∈Pn und einem Punkt V1∈Pm gibt, der nicht den Schnitt
S∩SC schneidet. Sei Ω die Menge aller Wege zwischen V0 und V1 innerhalb von
S, so gilt:
W ∈ Ω → ∃V | (V ∈ W) ∧ ( V ∈ S ∩ S C )
48
Abbildung 37: Zerschneiden einer Oberfläche in getrennte Bereiche
3.5.1.b Der diskrete Schnitt zweier Polygonoberflächen
Da triangulierte Polygonoberflächen stückweise eben sind, ist der Schnitt
zwischen zwei solchen Oberflächen stückweise linear. Wie in Abbildung 38
dargestellt, ist der Schnitt c ein Linienzug. Die Punkte von c sind die
Schnittpunkte der Kanten von S mit den Dreiecken von SC, sowie die
Schnittpunkte der Kanten von SC mit den Dreiecken von S. Das Finden dieser
Schnittpunkte ist der erste Schritt beim Schneiden von Polygonoberflächen.
Anschließend müssen diese Punkte zu einer Schnittkontur geordnet werden.
Dies geschieht unter Berücksichtigung der Topologie der beiden Oberflächen.
Abbildung 38: Schnitt zwischen zwei triangulierten Polygonoberflächen
3.5.1.c Schnitt zwischen einem Dreieck und einem Liniensegment
Das Problem ein Dreieck und eine Gerade oder ein Liniensegment im 3D-Raum
auf Schnitt zu testen kommt in der Computergrafik sehr oft vor. Insbesondere für
die Anwendung des Raytracing wurden bereits Algorithmen entwickelt und
optimiert. Badouel stellt zum Beispiel in [B90] einen Algorithmus vor, der von
Moller und Trumbore in [MT97] weiterentwickelt wurde. Der erste Schritt bei
49
beiden Algorithmen ist festzustellen, ob das Liniensegment L0L1 die Ebene ET, in
der das Dreieck ABC liegt, schneidet. Falls dies der Fall ist wird der Schnittpunkt
s berechnet.
Die Ebene ET(NT,δ) des Dreiecks wird durch dessen Normalen-Vektor NT und
dem Abstand der Ebene zum Ursprung δ definiert. Diese Größen werden wie
folgt bestimmt:
NT =
(C − A ) × (B − A )
(C − A ) × (B − A )
δ = NT • A
Ein Schnittpunkt zwischen dem Liniensegment L0L1 und der Ebene ET existiert
nur, wenn die beiden Endpunkte L0 und L1 auf verschiedenen Seiten von ET
liegen. Es muss gelten:
δ0 δ1 < 0 wobei δ0 = (L 0 − A ) • NT und δ1 = (L1 − A ) • NT
Falls der Schnittpunkt existiert, wird er folgendermaßen berechnet:
S = L0 +
δ0
δ0 + δ1
(L1 − L0 )
Von nun an lässt sich das Problem auf zwei Dimensionen reduzieren, um
festzustellen ob dieser Schnittpunkt mit der Ebene ET auch innerhalb des
Dreiecks liegt. In [MT97] wird der Schnittpunkt s in ein lokales
Koordinatensystem transformiert, in welchem die Eckpunkte des Dreiecks A, B
und C, jeweils die uv-Koordinaten (0,0), (1,0) und (0,1) haben (siehe
Abbildung 39). Um das zu erreichen müssen zuerst die Einheitsvektoren Eu und
Ev des lokalen Koordinatensystems berechnet werden. Für diese gilt:
E u • (C − A ) = 0
E v • (B − A ) = 0
Eu =
(C − A )
1
=
hB
(C − A ) × (B − A )
Ev =
(B − A )
1
=
hC
(C − A ) × (B − A )
Mit Hilfe von Eu und Ev kann man nun alle Punkte Sxyz∈R3, die in der Ebene ET
liegen in das lokale Koordinatensystem transformieren:
(S xyz − A ) • Eu
Suv =
(S xyz − A ) • E v
In dem lokalen Koordinatensystem ist es leicht festzustellen, ob ein Punkt
Suv(u,v) innerhalb des Dreiecks liegt. Dies ist nur dann der Fall, wenn gilt:
(0 ≤ u ≤ 1) ∧ (0 ≤ v ≤ 1) ∧ (u + v ≤ 1)
50
Abbildung 39: a) Lokales Koordinatensystem in der Ebene des Dreiecks
b) Dreieck nach der Transformation ins lokale Koordinatensystem
Um zu vermeiden, dass das lokale Koordinatensystem immer wieder für das
gleiche Dreieck berechnet wird, ist es empfehlenswert ein Dreieck gleich auf
sämtliche in Frage kommenden Kanten zu testen. Für die Bestimmung dieser
relevanten Kanten ist es sinnvoll einen Octree zu verwenden. Sämtliche Kanten
werden in einen Octree eingefügt, wobei als Kriterium der Schnitttest zwischen
einer Kante und einem Quader benutzt wird. Anschließend wird die BoundingBox eines Dreiecks benutzt, um aus dem Octree die Kanten zu erhalten, die
diese Bounding-Box und damit das Dreieck potenziell durchdringen.
3.5.1.d Schnittverläufe in einem Dreieck
In 3.5.1.c wurde beschrieben, wie man sämtliche Schnittpunkte zwischen den
Kanten der Oberfläche S und den Dreiecken der Schnittfläche SC und umgekehrt
findet. Nun geht es darum diese Punkte zu einem Schnittverlauf zu verbinden.
Um möglichst wenig Bedingungen an die Beschaffenheit von S zu stellen, wird
jedes Dreieck von S individuell zerschnitten. Es werden also keine globalen
Schnittverläufe auf S gesucht, sondern nur die innerhalb eines Dreiecks von S.
Dadurch kann S eine beliebige Topologie aufweisen, ohne dass Sonderfälle von
S, wie Nicht-Mannigfaltigkeiten besonders berücksichtigt werden müssen. S kann
auch eine Menge von separaten Dreiecken im Raum sein.
An die Schnittfläche SC werden folgende Bedingungen gestellt:
1. SC ist eine Mannigfaltigkeit. Das heißt, dass es in SC keine Kanten gibt, die
von mehr als zwei Dreiecken geteilt werden.
2. SC schneidet sich selbst nicht. Das heißt, dass es in SC keine Kanten gibt,
die Dreiecke von SC durchdringen
Wenn diese Bedingungen erfüllt sind, können innerhalb eines Dreiecks von S nur
vier verschiedene Arten von Schnittverläufen auftreten. Diese sind in
Abbildung 40 dargestellt. Punkte die mit X bezeichnet sind, sind durch Schnitt der
Kanten des dargestellten Dreiecks, mit den Dreiecken von SC entstanden. Die mit
Y bezeichneten Punkte, sind hingegen die Schnittpunkte der Kanten des
51
dargestellten Dreiecks mit den Kanten von SC. Die Fälle c und d enthalten im
Gegensatz zu a und b nur die mit Y bezeichneten Punkte. Das heißt, dass die
Kanten des Dreiecks nicht zerschnitten werden. Der Fall a ist der einzige bei dem
das Dreieck wirklich durchgeschnitten wird. Bei b wird das Dreieck lediglich
angeschnitten. Bei c und d treten nur innerhalb des Dreiecks Schnitte auf.
Abbildung 40: Fälle von Schnittverläufen innerhalb eines Dreiecks
Die in Abbildung 40 dargestellten Fälle können natürlich mehrfach und in
beliebiger Kombination innerhalb eines Dreiecks auftreten. Wenn wir annehmen,
dass die Schnittfläche SC sich selbst nicht schneidet, können wir davon
ausgehen, dass die Schnittverläufe sich gegenseitig ebenfalls nicht schneiden.
In Abbildung 41 sind exemplarisch alle vier Schnittverlaufarten innerhalb eines
Dreiecks dargestellt. Dabei wird das Dreieck in die drei voneinander getrennten
Sektoren S0, S1 und S2 unterteilt. Während S1 und S2 äußere Sektoren sind, ist
S0 ein innerer Sektor, der keinen Kontakt zu den Kanten des ursprünglichen
Dreiecks hat. Die äußeren Sektoren sind über diese Kanten mit dem Rest der
Oberfläche, außerhalb des Dreiecks, verbunden. Der Sektor S0 hingegen bildet
eine eigene kleine Oberfläche. Ob es Sinn macht solche kleinen Oberflächen
lokal zu erzeugen hängt vom Kontext der Anwendung ab. Diese Frage stellt sich
auch für den Schnittverlauf Y8Y9Y10. Dieser ändert global gesehen nicht viel am
Ergebnis der Schnittoperation. Er kompliziert lediglich die Triangulation des
Sektors S2.
Wenn man innere Sektoren wie S0 berücksichtigen möchte, muss man
feststellen, innerhalb welchen anderen Sektors sie liegen, weil dieser Sektor
dann ein Loch hat, das nicht durch Triangulation verschlossen werden darf. Da
innere Sektoren potenziell weitere innere Sektoren enthalten können, ergeben
sich bei dieser Zuordnung unter Umständen komplexe Verschachtelungen.
52
Abbildung 41: Kombination aus verschiedenen Schnittverläufen
3.5.1.e Zerlegung des Dreiecks in Sektoren
Wenn man auf die Berücksichtigung innerer Schnittverläufe (wie Y0Y1Y2. und
Y8Y9Y10 in Abbildung 41) verzichtet, vereinfacht sich das Auffinden der Sektoren
erheblich. Man muss lediglich den durchgängigen Schnittverlauf (hier C0 oder C2)
in eine Richtung durchlaufen, bis man an eine Dreieckskante kommt. Von dort
läuft man auf der Kante im Umlaufsinn des Dreiecks, bis man wieder einen
Schnittverlauf erreicht. Diese zwei Schritte wiederholt man, bis man wieder den
Anfang des ersten Schnittverlaufs erreicht, und damit einen geschlossenen
Linienzug erhält. Wenn man dies für beide Richtungen aller durchgehenden
Schnittverläufe tut, findet man sämtliche Sektoren, weil jeder Sektor mindestens
an einem Schnittverlauf liegt. Um doppelte Sektoren zu vermeiden, darf jeder
Schnittverlauf nur einmal in eine bestimmte Richtung durchlaufen werden.
Abbildung 42: Dreieck mit äußeren Sektoren wird zerschnitten
Damit die Konnektivität entlang der Schnittverläufe aufgehoben wird, müssen fast
alle X-Punkte und Y-Punkte verdoppelt werden. Die einzige Ausnahme sind
Punkte an denen ein Schnittverlauf innerhalb eines Dreiecks endet (in
53
Abbildung 42 ist das der Punkt Y6). In Abbildung 42b wurden die duplizierten
Vertices voneinander weggeschoben, um dieses zu verdeutlichen. In Wirklichkeit
befinden sich die duplizierten Vertices jeweils an der gleichen Stelle.
Auch wenn jedes Dreieck für sich zerschnitten wird, so muss man doch die
Kontinuität der Schnittverläufe beim Übergang von einem Dreieck zu einem
anderen sicherstellen. Konkret muss sichergestellt werden, dass bei den XPunkten jeder der beiden duplizierten Vertices jeweils zu benachbarten Sektoren
in zwei benachbarten Dreiecken gehört. Der Übergang ist im Detail in
Abbildung 43 dargestellt. Eine Kante zwischen den Dreiecken TL und TR wird
zerschnitten, wodurch die Punkte Xa und Xb entstehen. Obwohl Xa und Xb an der
gleichen Position liegen, ist es nicht egal welcher Sektor welchen Punkt enthält.
Würde zum Beispiel der Sektor SR1 den Punkt Xb enthalten, wäre der
Schnittverlauf inkonsistent. Um eine korrekte Zuweisung der beiden duplizierten
Vertices zu ermöglichen, wird die Orientierung der Kante berücksichtigt. Diese
muss für alle Dreiecke an der Kante gleich sein, und damit unabhängig von dem
Umlaufsinn der Dreiecke. Einer der duplizierten Vertices wird nun als näher am
Anfang, der andere näher am Ende definiert, wobei sie jedoch nicht bewegt
werden. Jetzt können die benachbarten Dreiecke unabhängig voneinander in
Sektoren unterteilt werden, wobei ein Sektor je nach seiner Position entlang der
Kante den passenden der beiden Vertices durchläuft.
Abbildung 43: Übergang eines Schnittverlaufs zwischen zwei Dreiecken
3.5.1.f Optimieren der Sektoren
Je nach Triangulation der Polygonoberflächen und relativer Position zueinander
können die Schnittverläufe sehr kurze Segmente enthalten. Diese entstehen,
wenn eine Kante sehr nah bei einem ihrer beiden Endpunkte oder sogar genau
darauf geschnitten wird. Dieser Fall kann auch zu Inkonsistenzen führen, weil
aufgrund der numerischen Ungenauigkeit sämtliche Kanten, die an einem
zerschnittenen Punkt liegen als geschnitten erkannt werden. Weitere Probleme
können sich bei der Triangulation ergeben, wenn einige Sektoren sehr kurze
Kanten mit daraus resultierenden Segmente enthalten. Deshalb ist es sinnvoll die
Sektoren vor der Triangulation zu optimieren.
Eine Methode der Optimierung ist Kanten-Schnittpunkte (X-Punkte) auf den
benachbarten Kantenendpunkt (V-Punkte) zu verschieben (Abbildung 44).
Dadurch entsteht beim Zerschneiden einer Kante nur ein neuer Punkt (hier Xb).
54
Die andere Seite des Schnitts verläuft durch einen der Dreieck-Vertices (hier V).
Dies erfolgt nur wenn die Länge der neuen Kante e sehr kurz ist, so dass das
Entfernen dieser Kante das Ergebnis nicht wesentlich verändert. Natürlich haben
die Punkte Xa und Xb vor der Optimierung, wie auch die Punkte Xb und V nach
der Optimierung die gleiche Position.
Abbildung 44: Verschieben eines Kanten-Schnittpunkts auf einen Kanten-Endpunkt
Eine weitere Möglichkeit die Sektoren zu optimieren ist es, die Schnittverläufe
innerhalb eines Dreiecks zu vereinfachen. Besonders kurze Segmente können
weggelassen werden. Aufeinanderfolgende, kolineare Segmente können
zusammengefasst werden. Dies ist auch für das spätere Triangulieren der
Sektoren von Bedeutung, weil viele Triangulations-Algorithmen voraussetzen,
dass es keine identischen, benachbarten Punkte oder kolineare Segmente in
dem zu triangulierenden Polygon gibt.
3.5.1.g Triangulieren der Sektoren
Nachdem die Sektoren der zerschnittenen Dreiecke identifiziert und optimiert
wurden, müssen sie trianguliert werden. Da jedes Dreieck für sich zerschnitten
wird, findet auch die neue Triangulation innerhalb eines Dreiecks und damit in
einer Ebene statt. Die 3D-Punkte des Sektors können in ein in der
Dreiecksebene liegendes 2D-Koordinatensystem transformiert werden. Damit ist
das Problem auf die Triangulation eines Polygons in 2D reduziert.
Welche Methode sinnvoll für die Triangulation der Sektoren ist, hängt davon ab
wie diese beschaffen sind. Wenn man innere Schnittverläufe ignoriert (siehe
3.5.1.e), sind es einfache Polygone, die keine Löcher enthalten. Für solche
einfachen Polygone empfiehlt sich die Ear-Cutting-Methode [M75]. Sie erzeugt
keine neuen Punkte innerhalb des Polygons, ist effizient und einfach zu
implementieren.
Für die Triangulation von Polygonen, die Löcher enthalten werden flexiblere
Algorithmen benötigt, wie zum Beispiel die Advancing-Front-Methode [L85]. Die
Front ist die Kontur des noch nicht triangulierten Bereiches. Sie wird durch eine
Reihe von Operationen, die in Abbildung 45 dargestellt sind, immer weiter
verschoben. Anders als bei der Ear-Cutting-Methode werden hier gegebenenfalls
neue Punkte innerhalb des noch nicht triangulierten Bereiches hinzugefügt.
Allerdings nur dann, wenn nicht bereits Punkte in der Nähe existieren, deren
Nutzung eine ausreichende Dreiecksqualität ermöglicht. Welche der dargestellten
Operationen angewandt wird hängt von dem inneren Winkel α des
Polygoneckpunktes ab. In Abbildung 45 sind drei Fälle dargestellt:
55
a. Für α < π/2 wird ähnlich wie beim Ear-Cutting die Ecke weggeschnitten,
wodurch ein neues Dreieck entsteht
b. Für π/2 < α < 3π/2 wird ein neuer Punkt erzeugt der zu Erzeugung von zwei
neuen Dreiecken dient
c. Für 3π/2 < α werden zwei neue Punkte und zwei Dreiecke erzeugt
Durch diese Operationen verschiebt sich die Front immer weiter. Der noch nicht
triangulierte Bereich (schattiert dargestellt) wird immer weiter reduziert, bis er
völlig verschwindet und die Triangulation abgeschlossen ist. Um die
Dreiecksqualität zu verbessern, werden manchmal die inneren Punkte
anschliessend verschoben.
Abbildung 45: Triangulation durch Advancing-Front
56
3.5.2 Implementierung
Das Schneiden einer Polygonoberfläche mit einer anderen Polygonoberfläche ist
im Computational-Module HxSurfaceCutter implementiert. Das Modul erwartet
als Input zwei Data-Modules vom Typ HxSurface: Die Polygonoberfläche die
geschnitten werden soll und die Schnittfläche. Als Ergebnis liefert
HxSurfaceCutter wieder eine HxSurface, welche die zerschnittene Oberfläche
repräsentiert. Das Ergebnis kann wieder als Input für die zu zerschneidende
Oberfläche verwendet werden. So kann man eine Oberfläche sukzessive
mehrfach zerschneiden.
HxSurface
HxSurfaceCutter
HxSurface
HxSurface
HxDisplaySurface
HxDisplaySurface
Abbildung 46: Von HxSurfaceCutter verwendete Module
57
Schnitt-Pipeline
Im Folgenden werden die Schritte und die Hilfsdatenstrukturen beschrieben, die
für die Berechnung der geschnittenen Oberfläche verwendet werden.
Oberfläche S
Oberfläche SC
Octree mit S-Kanten
1) Kanten gegen Dreiecke der
jeweils anderen Oberfläche
schneiden
2) zerschnittene S-Dreiecke
finden und Schnittpunkte
Dreiecken zuordnen
Schnittpunkte von
S-Kanten mit
Sc-Dreiecken
Octree mit S-Kanten
Schnittpunkte von
Sc-Kanten mit
S-Dreiecken
Zerschnittene
S-Dreiecke
Für zerschnittene S-Dreiecke:
Kanten Schnittpunkte
Für zerschnittene S-Dreiecke:
Dreiecks Schnittpunkte
3) Für zerschnittene S-Dreiecke
Schnittverläufe finden
Für zerschnittene S-Dreiecke:
Schnittverläufe
4) Für zerschnittene S-Dreiecke
Sektoren finden
Für zerschnittene S-Dreiecke:
Sektoren
5) Für zerschnittene S-Dreiecke
Sektoren triangulieren
Für zerschnittene S-Dreiecke:
Neue Dreiecke
6) Zerschnittene S-Dreiecke
entfernen. Neue Dreiecke
hinzufügen Konnektivität der
Patches testen
Abbildung 47: Schnitt-Pipeline
58
Es wird davon ausgegangen, dass die beiden Oberflächen bereits die
Information über die Kanten und Nachbarschaften von Kanten und Dreiecken
enthalten. In Abbildung 47 sind die wichtigsten Berechnungsschritte auf der
linken und die Daten auf der rechten Seite dargestellt:
1) Kanten gegen Dreiecke der jeweils anderen Oberfläche schneiden:
Wie in 3.5.1.c beschrieben, werden für beide Oberflächen die
Schnittpunkte der Kanten mit den Dreiecken der anderen Oberfläche
gefunden und in einer Liste gespeichert. Dabei werden nur relevante
Kanten mit Hilfe eines Octrees ausgewählt und getestet. Jedes Element
enthält: Den Index der Kante, den Index des Dreiecks und die Position des
Schnittpunktes auf der Kante als Zahl zwischen 0 und 1. Diese Art den
Schnittpunkt zu speichern macht es einfacher die Schnittpunkte auf einer
Kante zu sortieren. Die 3D-Postion kann leicht durch Interpolation
zwischen den beiden Endpunkten ermittelt werden.
2) Zerschnittene S-Dreiecke finden und Schnittpunkte Dreiecken
zuordnen: Für die Oberfläche S, die zerschnittenen werden soll, werden
die Dreiecke gesucht, die zerschnitten werden. Da innere Schnittverläufe
(siehe 3.5.1.d) nicht betrachtet werden sind das nur diejenigen Dreiecke,
deren Kanten zerschnitten werden. Für jedes dieser Dreiecke werden
sämtliche Kantenschnitte seiner drei Kanten abgelegt. Diese werden auch
den jeweiligen Kanten zugeordnet und innerhalb der Kanten im Sinne der
Kantenorientierung sortiert. Außerdem werden für jedes zerschnittene
Dreieck die Schnitte mit den Kanten der anderen Oberfläche abgelegt.
3) Für zerschnittene S-Dreiecke Schnittverläufe finden: Ausgehend von
den Schnittpunkten der Kanten des Dreiecks werden die Schnittverläufe
innerhalb des Dreiecks verfolgt. Dazu werden die Schnittpunkte des
Dreiecks unter Berücksichtigung der Topologie auf der Schnittfläche in die
Schnittverläufe eingeordnet.
4) Für zerschnittene S-Dreiecke Sektoren finden: Wie in 3.5.1.e
beschrieben werden aus den Schnittverläufen und der äußeren
Begrenzung des Dreiecks Sektoren erzeugt. Für jedes Dreieck wird eine
Liste mit Sektoren angelegt.
5) Für zerschnittene S-Dreiecke Sektoren triangulieren: Die Sektoren
(Polygone), in die ein Dreieck zerschnitten wurde, werden trianguliert
(siehe 3.5.1.g). Für die Triangulation wird das Advancing-Front-Verfahren
benutzt, welches in Amira bereits implementiert ist. Dies hat den Vorteil
dass man potenziell auch Sektoren mit Löchern triangulieren kann, falls
dies bei einer Erweiterung des Moduls nötig werden sollte. Für jedes
zerschnittene Dreieck wird eine Liste mit neuen Dreiecken abgelegt.
6) Zerschnittene S-Dreiecke entfernen. Neue Dreiecke hinzufügen
Konnektivität der Patches testen: Dreiecke, die zerschnitten wurden,
werden aus der Oberfläche S gelöscht. Dreiecke, die durch die
Triangulation der Sektoren entstanden sind, werden der Oberfläche
hinzugefügt. Anschließend werden die Patches auf Konnektivität getestet,
und gegebenenfalls aufgetrennt. Dafür stellt HxSurface bereits eine
Methode zur Verfügung.
Anschließend wird die zerschnittene Oberfläche in den Objekt-Pool von Amira als
Resultat von HxSurfaceCutter eingefügt.
59
3.5.3 Ergebnisse und Ausblick
Da das Zerschneiden der Polygonoberfläche den finalen Schritt bei der
Schnittmodellierung darstellt und auf die vorangehenden Schritte aufbaut, wird im
Folgenden der gesamte Planungsverlauf präsentiert. In Abbildung 48 sieht man
eine eingezeichnete Kontur (a) und die daraus erzeugte Regelfläche (b).
Anschließend ist in Abbildung 48c die zerschnittene Polygonoberfläche
dargestellt, wobei die beiden getrennten Teile der Oberfläche auseinander
geschoben wurden.
Abbildung 48: Beispiel für einen Schnitt
Die Abbildung 49 zeigt einen Mehrfach-Schnitt eines Kiefermodells mit einem
Zylinder. Dabei werden auch Bereiche zerschnitten, an denen die Oberfläche
eine Nicht-Mannigfaltigkeit darstellt. Dieser Bereich ist noch mal im Detail
abgebildet.
Abbildung 49: Beispiel für zerschnittene Nicht-Mannigfaltigkeit
Der wichtigste Bereich des Schnitt-Algorithmus, der noch verbesserungswürdig
ist, ist die Robustheit. Bei den vielen primitiven Elementen einer Oberfläche, die
gegeneinander geschnitten werden, reicht nur ein Fehler, um das gesamte
Ergebnis inkonsistent zu machen. Da zur Zeit nur Dreiecke und Kanten auf
Durchdringung getestet werden, gibt es bei Sonderfällen, wie zwei Kanten, die
sich Schneiden oft Probleme. Aufgrund der numerischen Ungenauigkeit kann es
vorkommen, dass eine Kante keines oder beide Nachbardreiecke der anderen
Kante schneidet. Dieser und andere Sonderfälle müssten gesondert behandelt
werden. Eine Möglichkeit wäre auch Kanten gegeneinander zu schneiden, und
60
das Ergebnis anschließend mit den Kante-Dreieck-Schnitten zu vergleichen, um
doppelte Schnittpunkte zu vermeiden.
Ein weiterer Problemfall sind Oberflächen, die teilweise exakt ineinander liegen.
Der Schnitt der beiden Oberflächen ist hier mathematisch betrachtet teilweise
eine Linie und teilweise eine Fläche. Bei einem numerischen Schnittest würde
man innerhalb der flächigen Teile des Schnittes vielfache Schnittpunkte finden,
aus denen man eine Begrenzung des flächigen Teils erzeugen müsste. Diese
Begrenzungen wären dann die Schnittlinien, entlang welcher die Oberflächen
zerschnitten werden.
Wie in 3.5.1.d beschrieben, wurde bei der jetzigen Implementierung auf das
Auffinden kleinster ausgeschnittener Bereiche innerhalb eines Dreiecks
verzichtet. Dies könnte bei manchen Anwendungen erforderlich sein, und wäre
daher eine sinnvolle Erweiterung des jetzigen Algorithmus. Die dabei zu
beachtenden Probleme sind im genannten Kapitel beschrieben.
Abbildung 50: Zerschneiden von Körpern
Zur Zeit wird eine Polygonoberfläche mit Hilfe einer anderen zwar zerschnitten,
die dabei entstehenden Löcher werden jedoch nicht verschlossen. Wenn das
Schneiden jedoch im Rahmen einer CSG-Anwendung eingesetzt werden soll,
muss das Ergebnis wieder eine geschlossene Oberfläche sein. Hierzu müsste
die Schnittfläche SC ebenfalls zerschnitten werden und zwar mit Hilfe der zu
schneidenden Oberfläche S. Die Schnittoperation müsste, wie bei CSGBerechnungen üblich (siehe 2.3.1) in beide Richtungen durchgeführt werden.
Anschließend müssten die Teile von SC, die innerhalb von S liegen, dupliziert
werden und je mit einer der Seiten von S verbunden werden (siehe
Abbildung 50). Da aber der jetzige Schnittalgorithmus fordert, dass die
Schnittfläche eine Mannigfaltigkeit ist, müssten nun beide Oberflächen diese
Bedingung erfüllen. Eine Verallgemeinerung des Schnittalgorithmus dahin, auch
nicht Mannigfaltigkeiten als Schnittfläche zuzulassen ist problematisch, weil eine
Innen-Außen-Zuordnung bei solchen Oberflächen nicht möglich ist. Dadurch
würde sich vor allem die Zuordnung der Teile von SC verkomplizieren. Dies ist
wohl auch der Grund aus dem sämtliche dem Autor bekannten CSG-Algorithmen
nur auf Mannigfaltigkeiten arbeiten.
61
4 Zusammenfassung und Bewertung
Es wurde ein Verfahren vorgestellt, das es erlaubt exakte Schnitte auf einer
Polygonoberfläche zu definieren und die Oberfläche, mitsamt innerer Strukturen,
entsprechend zu zerschneiden. Das Verfahren wurde implementiert und es
wurde in [ZGT02] gezeigt, dass es im CAS-Bereich sinnvoll eingesetzt werden
kann.
Abbildung 51: Beispiel für einen Schnitt [ZGT02]
Es ist möglich auf einer Polygonoberfläche Schnittkonturen einzuzeichnen, wobei
zwei verschiedene Zeichentechniken benutzt werden können: Freihand- und
Polygonzeichnen. Diese Schnittkonturen können mit verschiedenen Arten von
Schnittflächen (z.B. Regelflächen oder Minimalflächen) trianguliert werden. Mit
Hilfe von Werkzeugen, die unabhängig von dieser Arbeit implementiert wurden,
können auf die Schnittfläche Volumendaten projiziert werden, die eine
zusätzliche Information über zerschnittene Strukturen liefern (siehe
Abbildung 52c). Abschließend kann die Polygonoberfläche mit der Schnittfläche
zerschnitten werden. Die zu zerschneidende Polygonoberfläche muss dabei
keine Mannigfaltigkeit darstellen.
Abbildung 52: Beispiel für zerschnittene innere Strukturen
62
Die momentane Implementation bietet noch nicht die notwendige Benutzerfreundlichkeit und Robustheit, um sie für den Praxis-Einsatz Ärzten zur
Verfügung zu stellen. Dafür sind noch einige Verbesserungen notwendig:
•
Beim Zeichnen auf Oberflächen muss sichergestellt werden, dass immer
ein Weg zwischen zwei Punkten der Oberfläche gefunden wird, falls er
existiert.
•
Die Triangulation unregelmäßiger Konturen muss verbessert werden.
•
Der Schnitt von zwei Polygonoberflächen muss robuster auf Spezialfälle
reagieren.
Um einige der bestehenden Probleme zu lösen könnte man auch den
Arbeitsablauf modifizieren. Die Oberfläche könnte schon beim Einzeichnen der
Schnittkontur zerschnitten werden. Die Schnittfläche würde dann nur dazu dienen
innere Strukturen zu zerschneiden. Dann wäre es allerdings nicht mehr möglich
den Schnitt zu modifizieren, indem man die Schnittfläche verschiebt. Die Kontur
selbst müsste modifiziert werden, zum Beispiel durch Transformation, Expansion
oder Verschiebung der Kontur-Punkte.
63
5 Quellennachweis
[A90]
S.R. Arridge: Manipulation of Volume Data for Surgical Simulation. In
K.H. Höhne et al.(Eds.): 3D-Imaging in Medicine: Algorithms, Systems,
Applications NATO ASI Series F 60, Springer-Verlag, Berlin (1990), 289-300.
[Amira]
Amira-Visualisierungs-Software, www.amiravis.com.
[B90]
F. Badouel: An efficient Ray-Polygon intersection. Graphic Gems, Academic
Press (1990), 390-393.
[BKZ01]
H. Biermann, D. Kristjansson, D. Zorin: Aproximate Boolean Operations on
Free-from Solids. ACM SIGGRAPH (2001).
[BM02]
C. Bruyns, K. Montgomery: Generalized Interactions Using Virtual Tools within
the Spring Framework: Cutting. Medicine Meets Virtual Reality (2002), 23-26
[BMG98]
D. Bielser, V.A. Maiwald, M.H. Gross, Interactive Cuts through 3-Dimensional
Soft Tissue. Computer Graphics Forum, Volume 18, No. 3 (1998), 31-38.
[CH90]
J. Chen, Y. Han: Shortest paths on a polyhedron. Proc. 6th ACM Symp. on
Computational Geometry (1990), 360–369.
[D31]
J. Douglas, Solution of the Problem of Plateau, Trans. Amer. Math. Soc. 33
(1931), 263-321.
[EET93]
H. ElGindy, H. Everett, G.T. Toussaint: Slicing an ear in linear time. Pattern
Recognition Letters, vol. 14, (September 1993) 719-722.
[KS00]
T. Kanai, H. Suzuki: Approximate Shortest Path on a Polyhedral Surface Based
on Selective Refinement of the Discrete Graph and Its Applications. Geometric
Modeling and Processing (2000), 241-250.
[L85]
H. Lo: A new mesh generation scheme for arbitrary planar domains.
International Journal for Numerical Methods in Engineering 21 (1985),
1403-1426.
[M75]
G.H. Meisters: Polygons have ears. American Mathematical Monthly (June/July
1975), 648-651.
[M86]
M. Mäntylä: Boolean Opertions of 2-Mainfolds through Vertex Neighborhood
Classification, ACM Transactions on Graphics (1986).
64
[MS97]
A. Mazura, S. Seifert: Virtual Cutting in Medical Data. In: Westwood, J., et. al.
(eds.) Medicine Meets Virtual Reality. IOS Press, Amsterdam (1997), 420-429.
[MT97]
T. Moller, B. Trumbore: Fast, minimun storage ray-triangle intersection. Journal
on Graphic Tools, Vol.2, No.1 (1997) 21-28.
[PP93]
U. Pinkall, K. Polthier: Computing Discrete Minimal Surfaces and Their
Conjugates. Experimental Mathematics 2 (1993), 15-36.
[PTHL99]
B. Pflesser, U. Tiede, K Höhne: Simulation von Schnittoperationen in
medizinischen Volumenmodellen. Bildverarbeitung für die Medizin, Heidelberg
(1999), 182-186.
[R30]
T. Rado, The Problem of Least Area and the Problem of Plateau, Math. Z. 32
(1930), 763-796.
[SLS99]
A. Shostko, R. Löhner, W. Sandberg. Surface Triangulation over Intersecting
Geometries. International Journal for Numerical Methods in Engineering 44,
1359-1376, (1999).
[W99]
E. W. Weisstein: Eric Weisstein's World of Mathematics, 1999-2002,
http://mathworld.wolfram.com
[YHYT90]
T. Yasuda, Y. Hashimoto, S. Yokoi, J.I.Toriwaki: Computer system for craniofacial surgical planning based o CT images. IEEE Trans. Med. Imaging MI-9 3
(1990), 270-280.
[ZGT02]
S. Zachow, E. Gladilin, A. Trepczynski, R. Sader, H. Zeilhofer: 3D osteotomy
planning in cranio-maxillofacial surgery: experiences and results of surgery
planning and volumetric finite-element soft tissue prediction in three clinical
cases, CARS (2002), 983-987.
65
6 Abbildungsverzeichnis
Abbildung 1: Schneiden von Volumendaten [PTHL99] .....................................................7
Abbildung 2: Fünf topologische Fälle beim Schneiden von Tetraedern [BMG98]. .............8
Abbildung 3: Mengenoperationen auf Volumen durch ihre Begrenzungen ausgedrückt..10
Abbildung 4: Schnittmodellierung durch Einzeichnen einer Schnittkontur .......................13
Abbildung 5: Beispiel für ein Amira-Netzwerk.................................................................15
Abbildung 6: Amira im Einsatz.......................................................................................15
Abbildung 7: Polygon-Zeichnen .....................................................................................18
Abbildung 8: Freihand-Zeichnen....................................................................................19
Abbildung 9: Linienzug in 2D und Kurvenzug in 3D........................................................19
Abbildung 10: Kurvenzug in 3D wird zu Linienzug in 3D ................................................20
Abbildung 11: Schnitt einer Kugel mit einer Ebene E .....................................................21
Abbildung 12: Schnitt einer beliebigen Polygonoberfläche mit einer Ebene....................22
Abbildung 13: Mögliche Fälle des Schnitts mit einer Ebene. a: zwei Wege, b: ein Weg, c:
kein Weg gefunden .............................................................................................22
Abbildung 14: Mehre mögliche Wege auf Nicht-Mannigfaltigkeiten ................................23
Abbildung 15: Äußerer Winkel zwischen benachbarten Dreiecken .................................23
Abbildung 16: Berechnung des äußeren Winkels...........................................................24
Abbildung 17: Unterteilung in Patches bei Nicht-Mannigfaltigkeiten................................25
Abbildung 18: Von HxSurfaceContour benutzte Module.................................................25
Abbildung 19: Verfolgen des Schnitts mit der Ebene auf der Polygonoberfläche ............26
Abbildung 20: a) Polygonzeichnen und b) Freihandzeichnen .........................................27
Abbildung 21: a) Polygonzeichnen und b) Freihandzeichnen im Detail...........................28
Abbildung 22: Regelfläche.............................................................................................31
Abbildung 23: Beispiele für Regelflächen (Zylindermantel, Hyperboloid) ........................31
Abbildung 24: Erzeugen einer triangulierten Regelfläche ...............................................32
Abbildung 25: Gleichmäßiges Einfügen von Punkten in einen Linienzug ........................32
Abbildung 26: Masse-Feder-Modell auf einer Polygonoberfläche ...................................34
Abbildung 27: Verfeinerung einer Polygonoberfläche.....................................................34
Abbildung 28: Triangulation durch Ear-Cutting...............................................................36
Abbildung 29: Zentrierte Kantensumme.........................................................................39
Abbildung 30: Methoden eine Schnittfläche SC zu optimieren ........................................40
Abbildung 31: Von HxContourTriangulator benutzte Module ..........................................41
Abbildung 32: Beispiel für eine a)Kontur gefüllt durch eine b)Regelfläche, c)Minimalfläche
und d)Ear-Cutting-Triangulation...........................................................................44
Abbildung 33: Beispiel 2 für eine a)Kontur gefüllt durch eine b)Regelfläche,
c)Minimalfläche und d)Ear-Cutting-Triangulation..................................................45
Abbildung 34: Beispiele für die Expansion der Schnittfläche (b) und Hinzufügen eines
Rands (c) ............................................................................................................46
Abbildung 35: Regelflächen in konkaven Konturen ........................................................47
Abbildung 36: Der Schnitt zweier Oberflächen ...............................................................48
Abbildung 37: Zerschneiden einer Oberfläche in getrennte Bereiche .............................49
Abbildung 38: Schnitt zwischen zwei triangulierten Polygonoberflächen.........................49
Abbildung 39: a) Lokales Koordinatensystem in der Ebene des Dreiecks b) Dreieck nach
der Transformation ins lokale Koordinatensystem ................................................51
Abbildung 40: Fälle von Schnittverläufen innerhalb eines Dreiecks ................................52
Abbildung 41: Kombination aus verschiedenen Schnittverläufen....................................53
Abbildung 42: Dreieck mit äußeren Sektoren wird zerschnitten......................................53
Abbildung 43: Übergang eines Schnittverlaufs zwischen zwei Dreiecken .......................54
Abbildung 44: Verschieben eines Kanten-Schnittpunkts auf einen Kanten-Endpunkt .....55
Abbildung 45: Triangulation durch Advancing-Front.......................................................56
Abbildung 46: Von HxSurfaceCutter verwendete Module...............................................57
Abbildung 47: Schnitt-Pipeline.......................................................................................58
Abbildung 48: Beispiel für einen Schnitt.........................................................................60
Abbildung 49: Beispiel für zerschnittene Nicht-Mannigfaltigkeit ......................................60
Abbildung 50: Zerschneiden von Körpern ......................................................................61
Abbildung 51: Beispiel für einen Schnitt [ZGT02] ...........................................................62
Abbildung 52: Beispiel für zerschnittene innere Strukturen.............................................62
66
67