ENERGIETECHNISCHES PRAKTIKUM I Versuch 8: Gleichstromsteller
Werbung

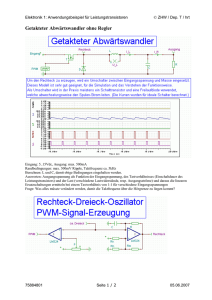
ENERGIETECHNISCHES PRAKTIKUM I Versuch 8: Gleichstromsteller 1 EINFÜHRUNG UND ZIEL DES VERSUCHES ....................................................... 2 2 DAS PRINZIP DES TIEFSETZSTELLERS ............................................................ 5 2.1 Tiefsetzsteller mit idealen Bauteilen............................................................................ 5 2.1.1 Kontinuierlicher Betrieb ....................................................................................... 5 2.1.2 Stromwelligkeit des Spulenstromes in Abhängigkeit des Tastgrades .................. 8 2.1.3 Lückbetrieb ........................................................................................................... 9 2.1.4 Lückbetrieb mit Ue konstant, Ua variabel ........................................................... 10 2.2 Versuchsvorbereitung ................................................................................................ 11 2.2.1 Dimensionierung der Induktivität L.................................................................... 12 2.2.2 Dimensionierung der Ausgangskapazität C0 ...................................................... 12 3 VERSUCHSDURCHFÜHRUNG .......................................................................... 14 4 LITERATUR .................................................................................................... 15 1 Einführung und Ziel des Versuches In vielen Anwendungen steht zur Speisung von Gleichstromverbrauchern eine konstante Gleichspannungsquelle zur Verfügung. Hierbei ist der Verbraucher nur selten so der Quelle angepaßt, daß er unmittelbar aus dieser Quelle versorgt werden kann und sich die gewünschte Leistung einstellt. Im Allgemeinen wird man die Leistung im Verbraucher begrenzen oder verstellen müssen. Dabei ist die Spannung am Verbraucher entweder in Stufen oder kontinuierlich zu verändern. Um dies zu erreichen, wird zwischen Quelle und Verbraucher ein Zwischenglied eingefügt, an dem die Differenz der Spannungen der Quelle und des Verbrauchers auftreten kann. Als einfache technische Lösung bietet sich hierfür ein Widerstand an. Er setzt die Spannung am Verbraucher zwar herab, verursacht jedoch bei zunehmender Leistung erhebliche Verluste. Außerdem ist die Spannung am Verbraucher lastabhängig. Setzt man statt des Widerstandes einen Transistor ein, so lässt sich zumindest der zweite Nachteil vermeiden, da die Spannung zwischen Kollektor und Emitter des Transistors stufenlos verstellt werden kann. Diese Lösung wird üblicherweise bis zu Leistungen von ca. 100W in Netzteilen benutzt, wobei unabhängig von der Eingangsspannung eine möglichst konstante und lastunabhängige Spannung am Verbraucher angestrebt wird. Solche Spannungskonstantregler werden üblicherweise als Längs- oder Linearregler (vgl. Abbildung 1.1) bezeichnet. Abbildung 1.1: Linearregler 2 Bei großen Spannungsdifferenzen zwischen Versorgungs- und Lastspannung bei gleichzeitig hohen Lastströmen muß die volle Differenzleistung im Längsregler in Wärme umgesetzt werden. Beispiel: Versorgungsspannung 12 V, Lastspannung 1,8 V, Laststrom 10 A. Lastleistung: 18 W Wärmeleistung im Längsregler: (12 V − 1,8 V ) ⋅ 10 A = 102 W Quellenleistung: 12 V ⋅10 A = 120 W Reglerwirkungsgrad: η = Pab = 15% Pauf Bei größeren Leistungen strebt man daher eine andere, weitgehend verlustlose Lösung für das Bindeglied zwischen Quelle und Verbraucher an. Man "blendet" im Verlauf der Eingangsspannung einen Teil der Spannung über einen elektronischen Schalter aus, so daß der Verbraucher als Mittelwert eine geringere Spannung als die Spannung der Eingangsquelle sieht. Dieses "Ausblenden" geschieht am einfachsten mit einem Tiefsetzsteller (vgl. Abbildung 1.2). Abbildung 1.2: Prinzipieller Aufbau eines Tiefsetzstellers Man kann die elektrische Wirkung der Spule mit der mechanischen Wirkung einer Schwungmasse vergleichen. In einem Automotor sorgt die Schwungscheibe u.a. dafür, daß die sehr energiereichen aber kurzzeitigen Verbrennungsvorgänge so verteilt werden, daß sie beim Fahren nicht mehr als ruckartiges Ereignis wahrgenommen werden. Angewendet werden kann dieses Prinzip z.B. im Bereich einiger 100 W in getakteten Netzteilen sowie im Bereich höherer Leistung, wobei mit Hilfe von Gleichstromstellern Gleichstrommotoren stufenlos in ihrer Drehzahl verstellt werden. Beispielsweise werden Gleichstromsteller in Antriebssystemen von elektrisch betriebenen Straßenfahrzeugen (Gabelstapler, Elektroautos), in akkubetriebenen Elektrowerkzeugen oder im Modellbau verwendet. 3 Im Zuge der technischen Weiterentwicklung haben sich die Einsatzgebiete von Einquadranten-Spannungsstellern jedoch grundlegend gewandelt. Heutzutage haben neue Antriebskonzepte die Gleichstrommotoren nahezu verdrängt. Jedoch haben die Tiefsetzsteller mit hohem Wirkungsgrad ( η ≥ 90% ), niedrigen Ausgangsspannungen (UA = 0,7....12 V) und mittleren Strömen (IA = 0,1....400 A) insbesondere in netzstromunabhängigen Geräten eine sehr große Bedeutung gewonnen. Keine Sendeendstufe in einem Handy, kein Prozessor, keine Hintergrundbeleuchtung in einem Laptop, Palmtop, Pager..... kein heimischer PC kommt ohne diskrete dezentrale hocheffiziente Gleichstromsteller aus. Hierbei bestimmen oftmals die immer leistungsfähiger werdenden CPUs die Anforderungen an die Gleichstromsteller. In der nächsten CPU-Generation sind Kernspannungen zwischen 0,7 V und 1,4 V bei Strömen zwischen 50 A und 400 A erforderlich. Um den geänderten Anforderungen an Gleichstromsteller und den neueren Technologien gerecht zu werden, soll in diesem Versuch die prinzipielle Funktion eines Tiefsetzstellers besprochen werden. Ausgehend von den Grundlagen, die in Vorlesung und Skript "Leistungselektronik" von Prof. De Doncker ausführlich behandelt werden, sollen bestimmte Bauelemente für einen Tiefsetzsteller dimensioniert werden. Die Dimensionierung soll durch Messungen verifiziert werden. Alle Beispiele sind konkret auf kleinere Gleichstromsteller, wie sie auch im Versuch benutzt werden, zugeschnitten. 4 2 Das Prinzip des Tiefsetzstellers 2.1 Tiefsetzsteller mit idealen Bauteilen Die Funktionsweise des Tiefsetzstellers wird an der in Abbildung 2.1 dargestellten Schaltung beschrieben. Der Verbraucher, hier ein ohmscher Widerstand, wird über die skizzierte Schaltung versorgt. Diese besteht aus einem schaltenden Halbleiter T, einer Induktivität L zur Energiespeicherung, einem Ausgangskondensator C0 und einer Freilaufdiode D. Ua RLast Abbildung 2.1: Prinzipieller Aufbau eines Tiefsetzstellers mit MOSFET Zunächst werden alle Bauteile als ideal betrachtet, d.h. die Quelle hat keinen Innenwiderstand und liefert eine konstante Spannung, die Ausgangsspannung ist konstant ( C 0 → ∞ ) und die Halbleiter sind entweder hochohmig (offen im nichtleitenden Zustand) oder widerstandslos (ideal leitend). Ferner wird die Spule sehr groß aber endlich angenommen. Betrachtet wird der eingeschwungene stationäre Zustand. Dazu wird zunächst davon ausgegangen, daß der durch den ohmschen Verbraucher eingeprägte Strom identisch ist mit dem zeitlichen Mittelwert des Spulenstromes: IL = 2.1.1 Ua = I Last . RLast Kontinuierlicher Betrieb Um die Abhängigkeit der Ausgangsspannung von der Eingangsspannung und dem Tastgrad a zu berechnen, sollen zunächst die beiden möglichen Schaltzustände erläutert werden. 5 Definition: Das Tastverhältnis a beschreibt die Einschaltdauer t1 des Halbleiterventiles T im Verhältnis zur Periodendauer T = 1 (vgl. Abbildung 2.4). Der Tastgrad a wird von der f Steuerung zwischen 0 < a < 1 eingestellt. Wie sich der momentane Wert von a ergibt wird noch gezeigt. a) MOSFET leitet: “high” iL L UL Ue Ua UD Abbildung 2.2: Tiefsetzsteller, S eingeschaltet Sobald der Schalter eingeschaltet ist, fließt der Strom verlustlos, d.h. ohne Spannungsabfall (ideale Schalter), durch das schaltende Bauelement. Die Diode sperrt, da die Spannung uD negativ ist. Die Spannung an der Induktivität ist gleich der Differenz aus Eingangs- und Ausgangsspannung. uL = U e − U a (2.1) Der Stromanstieg wird durch die Induktivität L begrenzt und ist proportional zur Differenz von Eingangs- und Ausgangsspannung: di L U e − U a = dt L (2.2) Daraus folgt für den Stromverlauf: ia (t ) = ia (t = 0) + 6 Ue −Ua ⋅t L (2.3) b) MOSFET sperrt: “low” L iL UL Ue Ua UD Abbildung 2.3: Tiefsetzsteller, S ausgeschaltet Sobald der Schalter ausgeschaltet ist, kann der Strom nur durch die Diode weiterfließen. Im leitenden Zustand fällt an der (idealen) Diode keine Spannung ab. Dadurch ist der Spannungsabfall an der Induktivität gleich der negativen Ausgangsspannung. uL = − U a (2.4) Damit fällt der Strom linear: uL = L ⋅ di a dt ⇒ ia (t ) = ia (t = a ⋅ T ) − Ua ⋅ (t − aT ) L (2.5) Unter der Annahme, daß der Mittelwert des Stromes im gewählten, stationären Betriebspunkt konstant ist, darf über der Induktivität im Mittel keine Spannung abfallen. Die Spannungszeitflächen über der Drossel sind gleich groß, es muss also gelten: T ∫u 0 L aT T 0 aT ⋅ dt = ∫ (U e − U a ) ⋅ dt + ∫ − U a ⋅ dt = 0 (2.6) bzw. ia (t = 0) = ia (t = T ) (2.7) Als Lösung des Integrals ergibt sich somit: (U e − U a ) ⋅ a ⋅ T + (−U a ) ⋅ (1 − a) ⋅ T = 0 (2.8) Nach Umformung erhält man folgende Abhängigkeit der Ausgangsspannung von der Eingangsspannung und des Tastgrades: U a = a ⋅U e 7 (2.9) Entsprechend dem eingestellten Tastgrad transformiert sich also die Quellenspannung U e auf die Ausgangsseite in einer mittleren Spannung U a . Die Spannung ist für a = 1, d.h., wenn der Schalter immer in Stellung 1 steht (entsprechend dem Ersatzschaltbild in Abbildung 2.2a)), gleich der Quellenspannung U e , für a < 1 entsprechend kleiner. U gleich große Flächen Ue Ua aT T t 2T iL DIL aT T 2T t Abbildung 2.4: Spannungszeitflächen über L und Stromverlauf im kontinuierlichen Betrieb Da in der Schaltung keine ohmschen Verbraucher vorhanden sind und die Verluste in den Halbleitern vernachlässigt werden, ist die aufgenommene Leistung an der Eingangsseite gleich der abgegebenen Leistung an der Ausgangsseite. Damit ergibt sich für die Ströme: I Last = 2.1.2 1 ⋅ Ie a (2.10) Stromwelligkeit des Spulenstromes in Abhängigkeit des Tastgrades Die maximale Stromwelligkeit ∆I L ist abhängig von der über der Spule anliegenden Spannung U, der Induktivität L und der Zeit ∆t . Aus di L ∆i = L⋅ L dt ∆t (2.11) Ue − Ua U U ⋅ (1 − a ) ⋅ a ⋅ a ⋅ T = a ⋅ (1 − a ) ⋅ T = e T L L L (2.12) U = L⋅ folgt: ∆I L = 8 Die maximale Stromwelligkeit ergibt sich bei einem Tastgrad von a = 0,5 . Als Beispiel ergeben sich für einen Tiefsetzsteller mit der Eingangsspannung Ue = 12 V und einer Induktivität von L = 10 µH folgende, von der Schaltfrequenz fs abhängige Werte für die maximale Stromwelligkeit: fs 50 kHz 100 kHz 150 kHz ∆I Lmax 6A 3A 2A Tabelle 2.1: Abhängigkeit des Stromes an der Lückgrenze von der Schaltfrequenz 2.1.3 Lückbetrieb Bisher wurde davon ausgegangen, daß der Spulenstrom zu keinem Zeitpukt zu Null wird. Dies ist immer dann richtig, wenn der mittlere Spulenstrom ( = Laststrom) größer als die halbe Stromwelligkeit ist. Ist der mittlere Spulenstrom exakt gleich der halben Stromwelligkeit (z.B. durch Vergrößerung des Lastwiderstandes), dann wird der Spulenstrom kurzzeitig zu Null. Dieser Betriebszustand ist die Lückgrenze (Index LG). Es gilt mit Ue = konstant: I L, LG = U 1 ⋅ ∆I L = e ⋅ (1 − a ) ⋅ aT 2 2⋅ L (2.13) Sinkt der Laststrom noch weiter, so liegt Lückbetrieb (Index LB) vor. Der Maximalwert ergibt sich für a = 0,5. Für größere mittlere Ströme liegt immer kontinuierlicher Betrieb vor. I L,max LG = U 1 ⋅ ∆I Lmax = e ⋅ T 2 8⋅ L (2.14) Der Verlauf in Abhängigkeit vom Tastgrad ist in Abbildung 2.5 zu sehen. Bei der Auslegung von Schaltnetzteilen müssen häufig auch Anforderungen an die maximale Stromwelligkeit beachtet werden, die wie aus (2.13) folgt, ebenfalls für a = 0,5 maximal wird. 9 IL max I L,LG Abbildung 2.5: Strom an der Lückgrenze in Abhängigkeit vom Tastgrad a (Ue=konst) 2.1.4 Lückbetrieb mit Ue konstant, Ua variabel Ob kontinuierlicher oder diskontinuierlicher Stromverlauf vorliegt, hängt von den Parametern Induktivität, Schaltfrequenz und Ausgangsstrom ab. Bei diskontinuierlichem Stromverlauf spricht man auch vom Lückbetrieb, es gilt: a ⋅T + ε ⋅T < T (2.15) wobei ε durch die Abfallzeit des Stromes definiert ist. U Ue Ua aT T 2T ia ∆IL aT 2T T Abbildung 2.6: Spannungszeitflächen und Stromverlauf im Lückbetrieb 10 Entsprechend der Gleichungen (2.9)-(2.13) ergeben sich für die Spannungen und Ströme im Lückbetrieb: Ua a = Ue a + ε I L,LB = IˆL,LB 2 ⋅ (a + ε ) = (2.16) ε ⋅ T ⋅U a U ⋅ (a + ε ) = e ⋅ T ⋅ a ⋅ ε 2⋅ L 2⋅ L (2.17) aus (2.16) und (2.17) folgt schließlich Ua = Ue a2 1 I LB a 2 + ⋅ L,max 4 I L,LG (2.18) Zeichnet man nun für beide Betriebsarten (kont. und Lückbetrieb) die Ausgangsspannung über dem mittleren Ausgangsstrom (hier normiert auf die Eingangsspannung und den maximalen Strom an der Lückgrenze) mit dem Tastgrad a als Parameter und Ue = konstant, so ergibt sich das in Abbildung 2.7 dargestellte Bild. Dabei ist der Lückbetrieb (engl. dicontinous conduction mode) in grau vom nicht lückenden Betrieb (engl. continous conduction mode) abgegrenzt. 1 , 0,5 a 0,1 IL max , , I L,LG Abbildung 2.7: Betriebsdiagramm Ua= f( I L ) mit Tastgrad a als Parameter (Ue = konst.) 2.2 Versuchsvorbereitung Ausgehend von den theoretischen Grundlagen sollen einige der wesentlichen Komponenten des Stromrichters berechnet werden. Folgende Daten sind bekannt: 11 Schaltfrequenz: f = 50 kHz, 100 kHz, 150 kHz Maximale Eingangsspannung: Ue max = 12 V Maximale Ausgangsspannung: Ua max = 6 V Minimale Ausgangsspannung: Ua min = 0,8 V Maximalstrom am Ausgang: ILast max = 6 A Berechnen Sie die minimale und maximale Einschaltdauer von T für den kontinuierlichen Betrieb aus diesen Daten ! t1min = 2.2.1 t1max = Dimensionierung der Induktivität L Die Induktivität soll so dimensioniert werden, dass einerseits die Stromwelligkeit nicht zu groß wird (L möglichst groß) andererseits aber das Bauteil u.a. möglichst klein und preiswert ist (L möglichst klein). Wird eine maximale Stromwelligkeit ∆I L vorgegeben, so folgt aus Gleichung (2.12): L= U e ⋅ (1 − a ) ⋅ a T ∆I L (2.19) Berechnen Sie die Induktivität L, unter der Voraussetzung, daß bei f = 150 kHz und Ue = 12 V die Stromwelligkeit 13 ⋅ I Lmax = 2 A nicht überschreitet! L= Wie groß muß die Strombelastbarkeit (Spitzenwert) der Spule mindestens sein ? I= 2.2.2 Der Dimensionierung der Ausgangskapazität C0 dreieckförmige Wechselstrom ½ · DIL ruft im idealen, d.h. verlustfreien Ausgangskondensator C0 eine Wechselladung DQ hervor, wobei die zu- und abfließenden Ladungen (gemessen über eine Periode) gleich groß sind (vgl. Abbildung 2.6). Die dreieckförmige Fläche beträgt also: 2 ⋅ ∆Q = 1 T T ⋅ ∆I L ⋅ = ∆I L ⋅ 2 2 4 (2.17) 12 Abbildung 2.6: Wechselstromfluß im Kondensator C0 Üblicherweise bestimmt die Art der Last (z.B. eine CPU) wie groß die maximale Welligkeit der Ausgangsspannung noch sein darf. Mit der Beziehung Q = C ⋅ U ergibt sich dann: C0 ≥ ∆I L 1 ∆Q = ∆U a ∆U a 8 f (2.18) Berechnen Sie den minimalen Wert für C0, anhand der Ergebnisse aus Kapitel 2.2.1, wenn ∆U a = 20 mV gelten soll! C0 = 13 3 Versuchsdurchführung Die Erläuterung des genauen Versuchsablaufes erfolgt im Rahmen der Vorbesprechung. 14 4 Literatur [Lenk98]* Ron Lenk Practical Design of Power Suppies IEEE Press 1998 ISBN 0-7803-3458-2 [Doncker01]* Rik W. De Doncker Skriptum zur Vorlesung Leistungselektronik RWTH-ISEA 2001 [Skudelny95] Hans Chr. Skudelny Stromrichtertechnik Verlag der Augustiunus Buchhandlung 1995 ISBN 3-86073-189-0 [Hirschmann90] W. Hirschmann Schaltnetzteile Siemens 1990 ISBN 3-8009-1550-2 [Kilgenstein92]* O. Kilgenstein Schaltnetzteile in der Praxis Vogel 1992 ISBN 3-8023-1436-0 [Mohan95] Power Electronics John Wiley 1995 ISBN 0-471-58408-8 Mohan, Undeland Hinweis: Literatur, die mit einem * gekennzeichnet ist, wird besonders empfohlen. 15