Komplett-Download
Werbung

Technische Universität Ilmenau
Fakultät für Informatik und Automatisierung
Institut für Technische Informatik und Ingenieurinformatik
Lehrgebiet Methodik des Hardwareentwurfs
Script zur Lehrveranstaltung
Analoge und digitale Schaltungen
im Studiengang Elektrotechnik/Automatisierung
Teil: Analoge Schaltungen
von Dr.-Ing. Norbert Hirt
Analoge Schaltungen
Inhalt Analoge Schaltungen
Einführung................................................................................................................................ ....
1
1.
Gegenkopplungsprinzip und gegengekoppelte Verstärker.......................................................
1.1
Grundgleichung gegengekoppelter Verstärker..................................................................
1.2
Einfluß der Gegenkopplung auf die Eigenschaften der Verstärkerschaltung....................
1.2.1
Verstärkungsänderung
1.2.2
Aussteuerbereich, nichtlineare Verzerrungen
1.2.3
Einfluß äußerer Störsignale
1.2.4
Überallesgegenkopplung
1.2.5
Grenzfrequenz und Bandbreite
1.2.6
Dynamische Stabilität gegengekoppelter Systeme
1.2.6.1 Stabilitätskriterium im Bode-Diagramm
1.2.6.2 Methoden der Frequenzgangkorrektur
3
3
3
2.
Analyse elektronischer Schaltungen..........................................................................................
2.1
Überblick........................................................................................................................
2.2
Knotenspannungsanalyse linearer Netzwerke.................................................................
2.2.1
Knotenspannungsgleichungen
2.2.2
Allgemeine Bildungsregel für die Admittanzmatrixgleichung
2.2.3
Grenzwertbetrachtungen in der Admittanzmatrixgleichung
2.2.4
Analyse von Netzwerken mit mehreren Signalquellen
2.2.5
Analyse von RC-OPV-Schaltungen im Frequenzbereich
2.3
Zur Knotenspannungsanalyse nichtlinearer Netzwerke...................................................
2.4
Modifizierte Knotenspannungsanalyse (MNA)...............................................................
11
11
17
Operationsverstärker..................................................................................................................
3.1
Eigenschaften und Kenngrößen von Operationsverstärkern............................................
3.1.1
Zum Schaltsymbol
3.1.2
Ersatzschaltung und Kennwerte realer OPV
3.1.3
Idealer Operationsverstärker
3.2
Operationsverstärker-Grundschaltungen...........................................................................
3.2.1
Invertierender und nichtinvertierender Verstärker mit OPV
3.2.2
Differenzverstärker mit OPV
3.2.3
Invertierender und nichtinvertierender Summierer
3.3
Einfluß realer OPV-Kennwerte auf die Übertragungseigenschaften................................
gegengekoppelter Schaltungen
3.3.1
Endliche Leerlaufverstärkung, dynamischer Fehler
3.3.2
Wirksamer Ausgangswiderstand
3.3.3
Eingangswiderstand
3.3.4
Endliche Gleichtaktunterdrückung
3.3.5
Einfluß von Offset-, Drift- und Ruhegrößen
3.3.6
Einfluß der Toleranz der Bauelemente
3.3.7
Analysebeispiele von Verstärker-Schaltungen
3.4
Dynamisches Verhalten (Slew Rate).................................................................................
3.4.1
Kleinsignalaussteuerung
3.4.2
Großsignalaussteuerung
3.5
Transimpedanz-Verstärker................................................................................................
3.5.1
Aufbau und Wirkungsweise
3.5.2
Vergleich mit konventionellen OPV
3.5.3
Kennwerte
3.6
Schaltungstechnische Ausführung von OPV-Stufen.........................................................
3.6.1
Differenz-Eingangsstufe
3.6.2
Ausgangsstufe
37
37
3.
27
30
43
48
61
65
69
Analoge Schaltungen
4.
Verstärkerschaltungen mit OPV................................................................................................
4.1
Strom-Spannungswandler und Stromverstärker...............................................................
4.2
Spannungsverstärker und Spannungs-Strom-Wandler.....................................................
4.3
Instrumentationsverstärker...............................................................................................
4.4
OPV-Schaltungen mit kombinierter positiver und negativer Rückkopplung....................
4.5
Programmierbare Verstärkerschaltungen.........................................................................
4.5.1
Verstärker mit Widerstandsnetzwerk
4.5.2
Verstärker in SC-Technik
4.6
Schnelle Verstärker für A/D-Umsetzer.............................................................................
73
74
75
77
80
83
86
5.
Lineare Rechen- und Regelschaltungen mit OPV.......................................................................
87
5.1
Addier- und Subtrahierschaltungen....................................................................................
87
5.2
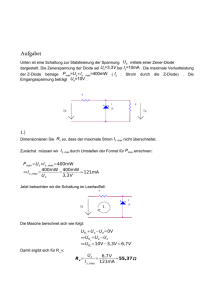
Konstantspannungsquellen.................................................................................................
88
5.2.1
Prinzip der Spannungsstabilisierung mit Z-Dioden
5.2.2
Konstantspannungsquellen mit OPV
5.2.3
Konstantspannungsquellen mit erhöhtem Ausgangsstrom
5.2.4
Spannungsstabilisierung mit Regelschaltungen
5.2.5
Symmetrierung erdfreier Spannungen
5.3
Konstantstromquellen mit OPV.........................................................................................
97
5.4
Integrator........................................................................................................................... 100
5.4.1
Integrator-Grundschaltungen
5.4.2
Einfluß realer OPV-Kennwerte bei Integratoren
5.4.2.1 Endliche Verstärkung, Offsetspannung und Eingangsruheströme
5.4.2.2 Dynamischer Fehler bei endlicher Verstärkung und Bandbreite des OPV
5.4.3
SC-Integrator
6.
Analogkomparatoren mit OPV...................................................................................................
6.1
Statisches Verhalten.........................................................................................................
6.2
Dynamisches Verhalten....................................................................................................
6.3
Komparatoren ohne Rückkopplung..................................................................................
6.3.1
Komparator-Grundschaltungen
6.3.2
Komparatoren mit stabilisierter Ausgangsspannung
6.3.3
Fensterkomparatoren und Pegeldetektoren
6.4
Hysteresekomparatoren mit OPV......................................................................................
6.4.1
Grundschaltungen von Hysteresekomparatoren
6.4.2
Hysteresekomparatoren mit stabilisierter Ausgangsspannung
6.4.3
Hysteresekomparator mit Flipflop
109
109
111
113
7.
Signal- und Funktionsgeneratoren..............................................................................................
7.1
Spezielle Signalgeneratoren mit OPV..............................................................................
7.2
Monostabiler Multivibrator mit OPV...............................................................................
7.3
Retriggerbare Monoflops..................................................................................................
7.4
Programmierbare Funktionsgeneratoren...........................................................................
7.4.1
Funktionsgenerator mit verschiedenen Ausgangssignalen
7.4.2
Funktionsgeneratoren mit Digital-Analog-Umsetzern
123
124
127
129
131
8.
Nichtlineare Verstärkerschaltungen mit OPV..........................................................................
8.1
Stetig nichtlineare Verstärkerschaltungen........................................................................
8.2
Unstetig nichtlineare Verstärkerschaltungen....................................................................
8.2.1
Ideale Diode
8.2.2
Begrenzung und Totzone
8.2.3
Extremwertauswahlschaltungen
8.2.4
Geschaltete Stromquelle, idealer FET
8.3
Analogschalter.................................................................................................................
8.3.1
Analogschalter mit Diodenbrücken
8.3.2
Analogschalter mit Transistoren
8.3.3
CMOS-Analogschalter
8.3.4
Analogschalter im Stromschaltmode
137
137
138
117
143
Analoge Schaltungen
Literatur:
/ 1/
Seifart, M.: Analoge Schaltungen. Verlag Technik Berlin, 1987.
/ 2/
Tietze, U.; Schenk, Ch.: Halbleiter-Schaltungstechnik.
Springer-Verlag Berlin-Heidelberg-New York 1988.
/ 3/
Kühn, E.: Handbuch TTL- und CMOS-Schaltkreise. Verlag Technik Berlin, 1985.
/ 4/
Seifart, M.: Digitale Schaltungen. Verlag Technik Berlin, 1988.
/ 5/
Roth, M.; Hirt, N.: Schaltungen für Digital-Analog- und Analog-Digital-Umsetzer.
In: Taschenbuch Elektrotechnik, Bd. 3/II (Hrsg. E. Philippow), Verlag Technik Berlin, 1988.
/ 6/
Schiffmann/Schmitz: Technische Informatik 1. Grundlagen der digitalen Elektronik.
(Springer-Lehrbuch) Springer-Verlag Berlin-Heidelberg-New-York-London-ParisTokyo-Hong Kong-Barcelona-Budapest 1993.
/ 7/
Borucki, L.: Digitaltechnik. B.G.Teubner Stuttgart 1989.
/ 8/
Beuth, K.: Digitaltechnik. Vogel Buchverlag Würzburg 1992.
/ 9/
Brauer/Lehmann: Elektronik-Aufgaben. Fachbuchverlag Leipzig 1988.
/10/
Dostál, J.: Operationsverstärker. Verlag Technik Berlin 1986.
/11/
Weißel, R.; Schubert, F.: Digitale Schaltungstechnik.
Springer Verlag Berlin-Heidelberg-New York-London-Paris-Tokyo-Hong Kong 1990.
/12/
Siegl, J.; Eichele, H.: Hardwareentwicklung mit ASIC. Einsatz und Anwendung von
CAE-Entwurfswerkzeugen (Reihe Mikroelektronik, Band 8). Hüthig Buchverlag Heidelberg 1990.
/13/
Baumann, P./Möller, W.: Schaltungssimulation mit Design Center.
Fachbuchverlag Leipzig-Köln 1994.
/14/
Lehmann, C.: Elektronik-Aufgaben. Band II: Analoge und digitale Schaltungen.
Fachbuchverlag Leipzig-Köln 1994.
Anhang
Ü
P
Übungsaufgaben
Praktikumsaufgaben: Schaltungssimulation mit Design Center (PSPICE)
Analoge Schaltungen
1
Analoge Schaltungen
Einführung
Die grundlegenden Aufgaben bei der Informationsverarbeitung sind das Senden, Empfangen und
die Verarbeitung von Nachrichten in Form von Signalen. Unter einem Signal wird dabei eine
technisch meßbare Größe verstanden, die sich zeitlich ändert und als Ergebnis dieser Änderung eine
Nachricht bzw. Information enthält. Man unterscheidet zwischen analogen und digitalen Signalen.
Charakteristisch für analoge Signale ist die Stetigkeit der Amplitude (kontinuierliches Signal). Sie
kann theoretisch unendlich viele Werte (Amplitudenstufen) annehmen. Bei digitalen Systemen wird
die Amplitude in endlich viele Stufen quantisiert. Der Zahlenwert einer zeitlich variablen Größe
wird zu diskreten aufeinanderfolgenden Zeitpunkten durch eine Folge von meist dual codierten
Impulsen dargestellt.
Bei technischen Realisierungen informationsverarbeitender Systeme als elektronische Schaltungen
wird als Informationsparameter meist die Spannungsamplitude verwendet. Wesentliche Gründe
dafür sind, daß sich Spannungssignale im Inneren eines elektronischen Systems i.a. einfacher
erzeugen, verarbeiten und messen lassen als Stromsignale und daß zur Verknüpfung mehrerer
Eingangssignale die Eingangsstufen wegen des gemeinsamen Bezugspotentials spannungsmäßig
meist problemlos parallel geschalten werden können..
{ Stromsignale werden z. B. in der Automatisierungstechnik zur äußeren Signalübertragung
zwischen verschiedenen Geräten verwendet (20-mA-Stromschleife). Für spezielle Zwecke
und Anwendungen sind auch andere Signalgrößen üblich, z. B. das Frequenzanalogsignal.
Die Leistungsfähigkeit einer elektronischen Schaltung als informationsverarbeitendes System wird
wesentlich durch die Verarbeitungseigenschaften der verwendeten Grundschaltungen und durch die
Schaltungsstruktur bestimmt. Obwohl insgesamt ein starker Trend zur digitalen Signalverarbeitung
zu verzeichnen ist, behalten analoge Schaltungen auch in Zukunft eine große Bedeutung. Viele
Verarbeitungsoperationen lassen sich digital nicht oder nicht ökonomisch lösen, z. B.
{
{
{
{
Verstärkung kleiner Signale,
Frequenzumsetzung,
Analog-Digital-Umsetzung,
Parallelverarbeitung vieler Eingangssignale (Echtzeitverarbeitung, Neuronale Netze).
Die wichtigste Operation in analogen Schaltungen ist die Signalverstärkung (kleiner Signale).
{ Die Möglichkeit der Verstärkung auch kleiner Signale ist das hervorstechende Kennzeichen
der analogen Schaltungstechnik im Vergleich zur Digitaltechnik.
Die Größe der Signalamplitude ist u.a. auch für die Auswirkung systemfremder oder systemeigener
Störsignale und die Genauigkeit der Signalverarbeitung von großer Bedeutung. Bei sehr kleinen
Signalpegeln (mV-, µA-Bereich) können Störsignale das Nutzsignal leicht vollständig verdecken.
Bei der Konzipierung analoger Systeme ist es deshalb i.a. günstig, den Signalpegel am Anfang
einer Verarbeitungskette, z. B. direkt am Sensor, auf einen möglichst hohen Pegel zu verstärken.
2
Analoge Schaltungen
Meist ist in mehrstufigen analogen Schaltungen auch eine deutliche Trennung zwischen Stufen zur
Signalverarbeitung und Spannungsverstärkung sowie den Stufen zur Erzeugung der notwendigen
Ausgangsleistung (Stromtreiber) erkennbar.
{ Man spricht in diesem Zusammenhang auch von Eingangs-, Ausgangs- und Koppelstufen.
Einen dominierenden Platz in der analogen Schaltungstechnik haben sich integrierte Analogschaltkreise, insbesondere integrierte Operationsverstärker (OPV) erobert. Ihre Entwicklung bewirkte
eine drastische Verringerung der Schaltungsvielfalt in der analogen Schaltungstechnik.
{ Viele Funktionen der analogen Signalverarbeitung lassen sich durch eine standardmäßige
Beschaltung dieser OPV lösen. Insbesondere ist auch die Arbeitspunktproblematik in den
meisten Anwendungsfällen mit dem Anschalten der Betriebsspannung gelöst.
{ Das wesentliche strukturelle Merkmal linearer Schaltungen mit Operationsverstärkern ist die
Gegenkopplung.
Infolge des durch die Massenproduktion möglichen niedrigen Preises von Operationsverstärkern
und anderen Analogschaltkreisen ist genau wie in der Digitaltechnik ein relativ großzügiger
Umgang mit diesen Elementen möglich. Durch schaltungstechnische und technologische
Weiterentwicklungen ist ein Einsatz von OPV inzwischen bis in den 200-MHz-Bereich möglich.
Schwerpunkt der nachfolgenden Ausführungen ist eine anwendungsorientierte Beschreibung von
Operationsverstärkern beim Einsatz in der analogen Schaltungstechnik. Auf Innenschaltungen und
technologische Probleme dieser OPV wird nur soweit eingegangen, wie es für das Verständnis der
Wirkungsweise des Bausteins in der Anwenderschaltung notwendig erscheint.
1. Gegenkopplungsprinzip
1
1.1
3
Gegenkopplungsprinzip und gegengekoppelte Verstärker
Grundgleichung gegengekoppelter Verstärker
Das 1876 von Thomson angegebene Gegenkopplungsprinzip ist für die analoge Schaltungstechnik
von grundlegender Bedeutung. Danach gelingt es, trotz Anwendung inkonstanter und meist stark
nichtlinearer aktiver Bauelemente, hochkonstante und lineare Verstärkerschaltungen zu realisieren.
Die Gegenkopplung beeinflußt gleichzeitig mehrere Eigenschaften der Verstärkerschaltung, auch
wenn es nicht ausdrücklich beabsichtigt ist. Das sind u.a. Verringerung nichtlinearer Verzerrungen,
Veränderung der Ein- und Ausgangsimpedanz, Stabilisierung gegen Parameterstreuungen und
Drift, Vergrößerung des Aussteuerbereiches, Verbesserung der Bandbreite und damit der Dynamik.
{ In einem gegengekoppelten Verstärker wird ein definierter Anteil des Ausgangssignales zum
Eingang zurückgeführt und dem Eingangssignal so überlagert, daß die Abweichungen der
Verstärkerschaltung vom idealen Verhalten weitgehend kompensiert werden.
{ Als Nachteile der Gegenkopplung in einer Verstärkerschaltung sind die Verringerung der
wirksamen Verstärkung und die Neigung zur dynamischen Instabilität zu nennen.
Die Grundgleichung eines gegengekoppelten Verstärkers läßt sich aus dem Signalflußbild bzw. aus
dem Signalflußgraphen des einschleifigen Regelkreises ableiten (Bild 1.1).
K0
Xe
K1
X'e
+
- K0
Xr
Xd
Xa
F0
Xe
K1
1
a) Signalflußbild
F0
Xa
1
b) Signalflußgraph (NM-Graph)
Bild 1.1: Grundstruktur eines gegengekoppelten Verstärkers (Regelkreis)
Mit den Übertragungsgleichungen Xa = F0 Xd , X'e= K1 Xe , Xd = X'e - Xr , Xr = K0 Xa der
einzelnen rückwirkungsfreien Übertragungsglieder in Bild 1.1 erhalten wir für das Ausgangssignal
Xa = K1
+F 0
K
1
X =+ 1
Xe .
K0 1 +
1
1 + K0 F0 e
K0 F0
Für sehr große Werte der Schleifenverstärkung K0 F0 bzw. des Gegenkopplungsgrades k = 1 + K0 F0
folgt die wichtige Aussage
Xa l +
K1
X
K0 e
für
K 0 F 0 >> 1.
{ Bei hinreichend großer Schleifenverstärkung |K0 F0| werden die Übertragungseigenschaften
einer gegengekoppelten Verstärkeranordnung nur vom Gegenkopplungsnetzwerk (K0) und
vom Eingangsnetzwerk (K1) bestimmt. Der Kennwert F0 des Verstärkers selbst verschwindet
aus der idealen Übertragungsfunktion !
4
1. Gegenkopplungsprinzip
1.2
1.2.1
Einfluß der Gegenkopplung auf die Eigenschaften der Verstärkerschaltung
Verstärkungsänderung
Der Einfluß von Änderungen der Leerlaufverstärkung F0 auf die Ausgangsgröße Xa ergibt sich aus
dem totalen Differential der o.g. Grundgleichung. Mit der Substitution dx l x erhält man
X a = X e
K1F0
F 0
K 0 F 0 K 0
K 1
1
−
+
.
1 + K0F0 K1
1 + K0F0 K0
1 + K0F0 F0
{ Die relative Verstärkungsänderung F0 /F0 wird um den Gegenkopplungsgrad k = 1 + K0 F0
reduziert im Ausgangssignal wirksam,
{ Änderungen im Ein- und Gegenkopplungsnetzwerk (K0 , K1) gehen voll als Fehler ein. Für
genaue Schaltungen müssen deshalb präzise passive Bauelemente verwendet werden.
1.2.2
Aussteuerbereich, nichtlineare Verzerrungen
Durch Gegenkopplung wird der eingangsseitige Aussteuerbereich einer Verstärkerschaltung meist
wesentlich vergrößert, da dem eigentlichen Verstärkereingang anstelle des Eingangssignales Xe nur
das viel kleinere Differenzsignal Xd zugeführt wird (vgl. Bild 1.1). Dabei gilt:
Xd = K1Xe
1
.
1 + K0F0
Das Eingangssignal Xd wird durch Gegenkopplung um den Gegenkopplungsgrad k = 1 + K0 F0
verringert. Eine gegengekoppelte Verstärkerschaltung kann so relativ große Eingangssignale Xe
linear verstärken, obwohl der Eingangsaussteuerbereich des Verstärkers selbst viel kleiner ist.
Nichtlineare Verzerrungen infolge der nichtlinearen Verstärkerkennlinie werden um den gleichen
Faktor k verringert am Ausgang wirksam.
1.2.3
Einfluß äußerer Störsignale
Der Einfluß äußerer Störsignale auf das Ausgangssignal gegengekoppelter Schaltungen ergibt sich
aus dem Signalflußbild (Signalflußgraph) in Bild 1.2. Nach Umformung erhält man:
Xa =
X3
X
F1F2
X
X 1+ 1 + 1 2 + 1
.
X e F 1 X e F 1 F 2 Xe
1 + K0F1F2 e
{ Der Störabstand ist um so größer, je größer die Nutzsignalverstärkung vor dem
Eingriffspunkt der Störquelle ist. Eingangsstörungen bzw. Eingangsrauschen lassen sich also
durch die Gegenkopplung nicht reduzieren.
X2
X1
Xe
Xr
F1
F2
Xa
Xe 1
X3
F2
F1
Xa
1
1
K0
X2
X1
X3
- K0
Bild 1.2: Einfluß äußerer Störsignale in gegengekoppelten Systemen
1
1. Gegenkopplungsprinzip
1.2.4
5
Überallesgegenkopplung
Bei mehrstufigen Verstärkerschaltungen kann mit einer Überallesgegenkopplung oft eine
wesentlich bessere Stabilität gegenüber Verstärkungsänderungen erzielt werden als bei
Gegenkopplung der einzelnen Stufen (Bild 1.3).
Xe
F0
-
F0
-
K0
X a1
Xe
-
F0
F0
K0
X a2
K0
Bild 1.3: Überallesgegenkopplung bei mehrstufigen Verstärkerschaltungen
Wird vereinfachend angenommen, daß eine n-stufige Verstärkerschaltung mit gleicher Stufenverstärkung F01 = F02 = ... = F0n vorliegt, so erhält man:
F1 =
X a1
Xe
=
F0
1 + K0F0
n
F 0
X
nF 1
F 1 = X a1 =
1 + K0F0 F0
e
F2 =
X a2
Xe
=
F 0n
,
1 + K 0 F 0n
F 0
X
nF 2
F 2 = X a2 =
.
1 + K 0 F 0n F 0
e
{ Die relative Änderung der Übertragungsfunktion ist bei Überallesgegenkopplung deutlich
kleiner als bei Einzelgegenkopplung.
1.2.5
Grenzfrequenz und Bandbreite
Die Übertragungsfunktion (Frequenzgang) eines Wechselspannungsverstärkers zeigt ein typisches
Bandpaßverhalten (Bild 1.4) und kann wie folgt beschrieben werden:
F o (p) =
pT u
U a (p)
V0
.
=
U e (p) 1 + pT o 1 + pT u
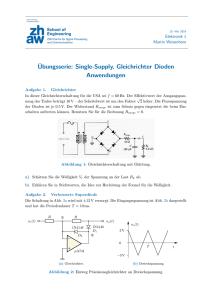
Daraus ergeben sich die 3-dB-Frequenzen fu und fo und damit die Bandbreite B = fo - fu :
1
fu = 1
;
2 C 1 (R 1 //r e )
1
fo = 1
.
2 C 2 (R 2 //r a )
{ Für einen Gleichspannungsverstärker entfällt das RC-Glied R1 , C1 und es gilt fu = 0.
Für einen gegengekoppelten Verstärker folgt damit die Übertragungsfunktion zu
F(p) =
V 0 pT u
F0
.
=
1 + K 0 F 0 (1 + pT o )(1 + pT u ) + K 0 V 0 pT u
6
1. Gegenkopplungsprinzip
Für niedrige Frequenzen f << fo ( pTo << 1) ergibt sich daraus die Näherung
F & (p) l
f &u =
pT u (1 + K 0 V 0 )
pT &u
V 0 pT u
V0
=
= V &0
1 + pT &u
1 + pT u (1 + K 0 V 0 ) 1 + K 0 V 0 1 + pT u (1 + K 0 V 0 )
fu
1 =
1 + K0V0
2T &u
bzw. V &0 =
V0
.
1 + K0V0
{ Die untere Grenzfequenz f &U eines gegengekoppelten Verstärker wird auf Kosten der
Verstärkung V &0 um den Faktor des Gegenkopplungsgrades k = 1+ K0 V0 verringert.
V0
|V|
dB
V*
0
lg f
f*u
fu
fo
f*o
f
1
Bild 1.4: Amplitudenfrequenzgang einer Verstärkerschaltung (Bode-Diagramm)
Für hohe Frequenzen f >> f U ( pTU >> 1) folgt mit der Näherung 1+ pTU lpTU
F(p) l
V0
V0
=
1 + pT o + K 0 V 0 1 + K 0 V 0
und
f &o =
1
To
1+p
1 + K0V0
= V &0
1
1 + pT &o
1 = f (1 + K V ) .
o
0 0
2T &o
{ Die obere Grenzfrequenz f &o wird auf Kosten der Verstärkung um den Faktor des
Gegenkopplungsgrades k erhöht.
{ Die Bandbreite B & = f &o − f &u des gegengekoppelten Verstärkers ist damit näherungsweise
ebenfalls um den Faktor k größer als im nichtgegengekoppelten System.
Daraus ergibt sich die wichtige Gesetzmäßigkeit V . B = f1 .
{ Das Verstärkungs-Bandbreite-Produkt V . B eines Verstärkers ist unabhängig vom Grad der
Gegenkopplung konstant und ergibt den Wert der f1 -Frequenz (0-dB-Frequenz):
V 0 B l V &0 B & l V &0 f &o = f 1
bzw.
V 0 B & f &o
.
V &0 = B = f o = 1 + K 0 V 0
1. Gegenkopplungsprinzip
7
Stark vereinfacht kann man das Verhalten von Verstärkerschaltungen wie folgt charakterisieren:
Niedrige Frequenzen
Gleichspannungsverstärker besitzen eine frequenzunabhängige Verstärkung.
Bei Wechselspannungsverstärkern fällt für f < f U die Verstärkung ab (Hochpaßverhalten).
Mittlere Frequenzen
Bei mittleren Frequenzen ist die Verstärkung beider Typen nahezu frequenzunabhängig; verbunden
damit ergibt sich eine konstante Signallaufzeit durch den Verstärker.
Hohe Frequenzen
Bei beiden Verstärkertypen fällt die Verstärkung mit steigender Frequenz infolge von Last- und
Schaltkapazitäten ab, man spricht von Tiefpaßverhalten.
Aus dem Frequenzgang lassen sich auch wichtige Aussagen über das Impulsverhalten (dynamische
Kennwerte im Zeitbereich) einer Verstärkerschaltung ableiten, wie z. B.
{
{
{
{
Anstiegszeit tr , Slew Rate (von fo abhängig),
Dachabfall (proportional zu fu , verschwindet für fu d 0),
Überschwingen (durch mehrere Zeitkonstanten bedingt),
Zeitverzögerungen td (oft vernachlässigbar).
Slew Rate
Die maximale Änderungsgeschwindigkeit der Ausgangsspannung Uo eines Verstärkers bei Großsignalaussteuerung wird Slew Rate Sr genannt und ist meist wesentlich kleiner als bei Kleinsignalaussteuerung
Sr =
.
U o
U o
.
= 2f o U o bzw. t r =
Sr
t
{ Bei Kleinsignalaussteuerung gilt in guter Näherung für die Anstiegszeit tr (rise time) bzw. tf
der Übergangsfunktion
tr, tf l
0, 35
.
fo
{ Auch bei Großsignalaussteuerung besteht ein fester Zusammenhang zwischen der oberen
Grenzfrequenz fo und der maximalen Änderungsgeschwindigkeit der Ausgangsspannung (bei
.
maximaler Ausgangsamplitude). Für die erreichbare Ausgangsamplitude U o gilt
U o max für f [ f o
Uo = Sr
2 f für f > f o
.
{ Oberhalb der Großsignalbandbreite fo sinkt die Ausgangsamplitude mit steigender Frequenz
und es entstehen größere Verzerrungen der Signalverläufe.
8
1. Gegenkopplungsprinzip
1.2.6
Dynamische Stabilität gegengekoppelter Systeme
Bei gegengekoppelten Systemen besteht die Gefahr der dynamischen Instabilität, d.h. es entsteht
selbst bei verschwindendem Eingangssignal ein Ausgangssignal (Selbsterregung). Infolge der
unvermeidbaren frequenzabhängigen Signalübertragung der einzelnen Funktionsblöcke (Verstärker,
Rückkopplungsschaltung) kommt es zu Phasenverschiebungen zwischen Ein- und Ausgangssignal,
so daß in bestimmten Frequenzbereichen aus der Gegenkopplung eine Mitkopplung werden kann.
{ Aus schaltungstechnischer Sicht interessiert vor allem, welche Maßnahmen zur Sicherung der
dynamischen Stabilität gegengekoppelter Schaltungen erforderlich bzw. möglich sind.
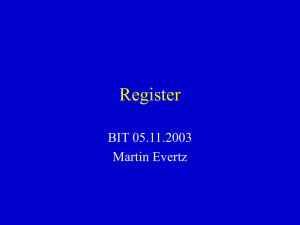
1.2.6.1 Stabilitätskriterium im Bode-Diagramm
Aus der Regelungstechnik sind Stabilitätskriterien bekannt, die sich auf die Untersuchung des
Frequenzganges der Schleifenverstärkung K0 . F0 (offene Kette) begründen. Zur Darstellung der
Zusammenhänge wird häufig das sogenannte Bode-Diagramm, eine logarithmische Darstellung des
Frequenzganges, verwendet (Bild 1.5).
|F|
| Ko Fo |
dB
fS
f
1
f2
lg f
φ
lg f
- 45°
- 90°
- 135°
- 180
Bild 1.5: Untersuchung der dynamischen Stabilität im Bode-Diagramm
Aus der Grundgleichung für gegengekoppelte Systeme läßt sich ableiten, daß zur Beurteilung der
Stabilität Betrag und Phasenwinkel der Schleifenverstärkung entscheidend sind.
F(p) =
Fo
Fo
mit
=
1 + K o F o 1 + K o F o e j
K o F o = K o F o e j .
Bei hohen Frequenzen sinkt der Betrag |K0 F0 | und es tritt eine Phasenverschiebung zwischen
Ein- und Ausgangssignal auf. Bei Wechselspannungsverstärkern sinkt die Verstärkung zusätzlich
auch bei niedrigen Frequenzen.
1. Gegenkopplungsprinzip
9
Wenn der Betrag der Schleifenverstärkung den Wert |K0 F0 | = 1 erreicht und der zugehörige
Phasenwinkel Φ = -180° beträgt, wird der Verstärker dynamisch instabil [Polstelle von F(p)]. Es
kommt zur Selbsterregung, d.h. auch ohne Eingangssignal entsteht ein Ausgangssignal. Damit läßt
sich ein Stabilitätskriterium wie folgt formulieren:
{ Der Betrag der Schleifenverstärkung muß auf Eins ( |K0 F0 | [ 1) abgefallen sein, bevor die
Phasenverschiebung den Wert Φ = - 180° erreicht hat.
Auf die Darstellung im Bode-Diagramm bezogen heißt das, ein gegengekoppeltes System ist genau
dann dynamisch stabil, wenn der Amplitudenfrequenzgang der Schleifenverstärkung | K0 . F0 | die
0-dB-Achse bei der Schnitt- bzw. 0-dB-Frequenz fS mit einer Neigung < 40 dB/Dekade schneidet
(gilt nur für sogenannte Phasenminimumsysteme).
{ Meist wird nur eine Neigung 20 dB/Dekade zugelassen, um einen Sicherheitsabstand und
kleines Überschwingen der Übergangsfunktion (Sprungantwort) zu gewährleisten.
1.2.6.2 Methoden der Frequenzgangkorrektur
Alle Maßnahmen zur Frequenzgangkorrektur verfolgen das Ziel, den Amplitudenfrequenzgang der
Schleifenverstärkung so zu beeinflussen, daß er in der Umgebung der Schnittfrequenz fS genügend
flach verläuft (Stabilitätskriterium).
Dabei soll in der Regel die Bandbreite B des gegengekoppelten Verstärkers möglichst groß sein,
damit der dynamische Fehler (p) = K 1F nicht unzulässig groß wird (große Werte für |K0 F0 |).
0
0
Eine Frequenzgangkompensation kann durch Änderung des Frequenzganges F0 (p), Beeinflussung
des Rückkopplungsfaktors K0 (äußere Kompensation) oder durch Verändern beider Frequenzgänge
erreicht werden. Meist wird F0 (p) beeinflußt, weil so K0 (p) und damit die Übertragungsfunktion
der gegengekoppelten Schaltung am wenigsten verändert werden.
{ Zur Frequenzgangkompensation werden typisch einfache RC-Netzwerke zur Erzeugung von
Pol- und/oder Nullstellen im korrigierten Frequenzgang F0* = F0 . FK verwendet.
Vorkorrektur
Nachkorrektur
kombinierte Korrektur
Bild 1.6: Anschlußmöglichkeiten von Korrekturnetzwerken zur Beeinflussung von F0
(innere Kompensation mit F0 * = F0 . FK )
Zur Kennzeichnung und Unterscheidung der einzelnen Korrekturmethoden werden als Kriterium
typisch entweder die Anschlußpunkte in der Schaltung oder die Übertragungsfunktion des
Korrektur- netzwerkes (Korrekturfunktion FK ) verwendet. Nach dem Anschlußpunkt in der
Schaltung wird z. B. zwischen Vorkorrektur, Nachkorrektur und kombinierter Korrektur
unterschieden (Bild 1.6).
10
1. Gegenkopplungsprinzip
Nach der Übertragungsfunktion der Korrekturnetzwerke werden allgemein drei Methoden der
Frequenzgangkompensation unterschieden, unabhängig davon, an welcher Stelle der Schaltung das
Korrekturnetzwerk angeschlossen wird und ob F0 und/oder K0 beeinflußt werden.
{ Lag-Kompensation (dominierender Pol),
{ Lead-Kompensation (Nullstellen-Kompensation, erzeugt eine Phasenvoreilung),
{ Lag-Lead-Kompensation (Pol-Nullstellen-Kompensation).
Zur Wahl der Kompensationsanschlußpunkte
Aus Stabilitätsgründen ist es im Prinzip gleichgültig, an welcher Stelle des Verstärkers das geeignet
bemessene Korrekturnetzwerk angeschlossen wird. Man kann immer Stabilität erreichen. Von der
Wahl der Anschlußpunkte werden aber gleichzeitig auch noch andere dynamische Eigenschaften
und Kennwerte der Verstärkerschaltung stark beeinflußt, z. B. Bandbreite und Rauschverhalten.
Bandbreite
Die Bandbreite eines kompensierten Verstärkers wächst bei kleiner Aussteuerung mit dem Grad der
Gegenkopplung. Treten aber bei höheren Frequenzen größere Amplituden auf, kommt es leicht zur
Übersteuerung des Verstärkers (vgl. Slew Rate).
Die Aussteuerbarkeit bei hohen Frequenzen wird um so weniger beeinflußt, je größer die
nachfolgende Spannungsverstärkung des Signals ist (Lag-Lead-Kompensation mit TD < TN ). Das
äußerste ist eine Vorkorrektur direkt am Eingang (Bild 1.6). Damit wird das Frequenzspektrum des
Eingangssignals begrenzt, die Bandbreite des nachfolgenden Verstärkers aber nicht beeinflußt.
Rauschen
Rauschspannungen ur werden in ihrer Bandbreite um so mehr herabgesetzt, je kleiner die wirksame
Spannungsverstärkung nach dem Korrekturnetzwerk ist. Der Grenzfall für gutes Rauschverhalten
ist somit eine Korrektur mit dominierender Polstelle (Lag-Kompensation) unmittelbar am Ausgang
der Verstärkerschaltung.
Zusammenfassend gilt:
{ Je näher eine Frequenzgangkorrektur am Eingang des Verstärkers liegt, desto mehr wird das
tieffrequente Spektrum des Eingangssignals gedämpft und die Aussteuerbarkeit verbessert.
{ Ist die Eingangskorrektur stark wirksam, so erhält man relativ stark rauschende, dynamisch
jedoch sehr schnelle Verstärker.
{ Wird die Eingangskorrektur schwächer ausgelegt, dann muß die Ausgangskorrektur stärker
wirksam werden (Stabilität). Sie dämpft das hochfrequente Frequenzspektrum (Rauschen).
Man erhält so rauscharme, dafür aber bezüglich der Impulsdynamik wesentlich schlechtere
Verstärker (nichtlineare Einschwingvorgänge).
{ Bei Komparatorbetrieb des Verstärkers wird meist keine Frequenzgangkorrektur verwendet.
Viele Verstärkerschaltkreise besitzen zusätzliche Pins für den Anschluß der Korrekturnetzwerke.
Damit werden Punkte der Innenschaltung für die Frequenzgangkompensation zugänglich; die Einund Ausgangspins bleiben frei zur Anschaltung des funktionellen Netzwerkes. Für die meisten
Anwendungen stellt der Anschluß der Korrekturnetzwerke an diesen Pins einen guten Kompromiß
dar. Außerdem werden von den Herstellern Angaben für die verstärkungsabhängige Bemessung der
Korrekturnetzwerke gemacht, die sicher zum stabilen Betrieb der Verstärkeranordnung führen.
2. Analyse elektronischer Schaltungen
2
2.1
11
Analyse elektronischer Schaltungen
Überblick
Die Analyse elektronischer Schaltungen wird i.a. auf die Berechnung elektrischer Netzwerke
zurückgeführt. Ziel der Analyse ist es, z. B. das Verhalten eines gegebenen Netzwerkes unter dem
Einfluß einer oder auch mehrerer Signalquellen zu ermitteln. Dazu werden die Knotenspannungen,
Zweigströme und ggf. die (Verlust-)Leistungen innerhalb des Netzwerkes berechnet. Grundlage für
die Berechnung der Spannungen und Ströme in einem Netzwerk sind die beiden Kirchhoffschen
Sätze und das Ohmsche Gesetz. Zur vollständigen Beschreibung eines Netzwerkes mit k Knoten
und z Zweigen benötigt man
(k-1)
Knotengleichungen der Art
I =0
und
(z-k+1)
Maschengleichungen der Art U = 0 .
Die Vorgehensweise zum Aufstellen der Kirchhoffschen Gleichungen für ein elektrisches Netzwerk
wird grundsätzlich als bekannt vorausgesetzt (vgl. auch Abschnitt 2.2). Es wird hier deshalb nur ein
kleines Beispiel zur Demonstration angegeben (Bild 2.1).
1
Iq
Ue1
I1
I2
R1 M 1
R2 M 2
Ue2
2
I3
R3
Kirchhoffsche Gleichungen
K1
M1
M2
1
1
1
-R1 R2 0
0 -R2 R 3
I1
Iq
I 2 = Ue1 -U e2
Ue2
I3
k = 2, z = 3
Bild 2.1: Zur Netzwerkberechnung mittels Kirchhoffscher Gleichungen
Für den Zweigstrom I3 erhält man aus dem angegebenen Gleichungssystem
I3 =
Z
Z1
Z
I + 2U + 3U
mit Z 1 = R 1 R 2 ; Z 2 = R 2 ; Z 3 = R 1
N q N e1 N e2
und N = R 1 R 2 + R 1 R 3 + R 2 R 3 (Systemdeterminante).
Dem Vorteil der physikalischen Anschaulichkeit und der einfachen Definition der Kirchhoff'schen
Gleichungen stehen beim praktischen Einsatz einige Nachteile gegenüber:
{ Es ist meist eine relativ große Anzahl von Gleichungen notwendig; dementsprechend ist die
Bestimmung der Koeffizienten und ihrer Vorzeichen aufwendig und auch fehleranfällig.
{ Das Auffinden aller Maschen eines Netzwerkes bzw. die Auswahl der unabhängigen
Maschengleichungen bereitet praktisch ggf. einige Schwierigkeiten, die hier aber nicht näher
betrachtet werden.
12
2. Analyse elektronischer Schaltungen
Knotenspannungsverfahren
Werden nicht gleichzeitig alle Knotenspannungen und Zweigströme in der Analyse gefordert, so
können einfachere und systematische Berechnungsverfahren verwendet werden. Sie gestatten i.a.
die Bestimmung der notwendigen Gleichungen nach einem recht einfachen Algorithmus. In der
Praxis hat sich so das Knotenspannungsverfahren bewährt und durchgesetzt (vgl. Abschnitt 2.2). Es
liefert im ersten Analyseschritt alle Knotenspannungen des Netzwerkes. Zweigströme werden,
wenn erforderlich, in einem zweiten Berechnungsschritt ermittelt.
Eine modifizierte Form des Knotenspannungsverfahrens (Modified Nodal Analysis, MNA - vgl.
Abschnitt 2.4) wird u.a. auch in bekannten Circuit-Simulatoren, z. B. SPICE, eingesetzt.
Überlagerungsverfahren
Werden nur einzelne Spannungen oder Zweigströme eines Netzwerkes gesucht, ist es häufig
zweckmäßig, noch weiter vereinfachte Berechnungsverfahren zu verwenden. Ein kurzer Überblick
über eine Auswahl solcher Verfahren ist u.a. in /4/ gegeben. Hier wird nur das praktisch wichtige
Überlagerungsverfahren (Superposition) beschrieben. Es ermöglicht die vereinfachte Berechnung
einer Knotenspannung bzw. eines Zweigstromes in einem Netzwerk mit mehreren unabhängigen
Quellen. Dazu betrachten wir die Teilnetzwerke in Bild 2.2, die sich aus dem Netzwerk in Bild 2.1
ergeben, wenn genau eine Signalquelle wirksam ist.
I1
Iq
I2
R1
I3
I1
R1
R3
R2
I2
R2
I3
I1
R3
I3
R2
R1
Ue1
U e1= Ue2 = 0
I2
R3
Ue2
I q = 0, Ue2 = 0
I q = 0, U e1= 0
Bild 2.2: Zur Anwendung des Überlagerungsverfahrens (Beispiel 1)
Für die einzelnen Ersatznetzwerke in Bild 2.2 ergeben sich nachfolgende Gleichungen, die sich bei
gleicher Koeffizientenmatrix [A] nur im Erregervektor unterscheiden:
1
1 1
−R 1 R 2 0
0 −R 2 R 3
.
I1
I2
I3
=
Iq
0
0
[A ] .
I1
I2
I3
=
0
U e1
0
[A ] .
I1
I2
I3
=
0
−U e2
U e2
.
Für den Zweigstrom I3 erhält man daraus genau die einzelnen Teilausdrücke der o.g. Lösung für
das gesamte Netzwerk. Sie unterscheiden sich nur im Zähler (Signaldeterminante), während der
Nenner N (Systemdeterminante) immer gleich bleibt. Wir erhalten:
I3 =
∏
Z
∏∏
∏∏∏
Z1
R R
Z
R
R
I = 1 2 I q , I 3 = 2 U e1 = 2 U e1 , I 3 = 3 U e2 = 1 U e2 .
N q
N
N
N
N
N
2. Analyse elektronischer Schaltungen
13
Verallgemeinert ergibt sich der Rechenweg für das Überlagerungsverfahren wie folgt:
{ 1) Bis auf eine Signalquelle (unabhängige Strom- oder Spannungsquelle) werden alle anderen
unabhängigen Quellen im Netzwerk unwirksam gemacht, d.h. Spannungsquellen (EMK's)
werden kurzgeschlossen, Stromquellen werden abgetrennt (vgl. Bild 2.2).
{ 2) Die gesuchte Größe (Zweigstrom bzw. Knotenspannung) wird berechnet.
{ 3) Wiederholung der Schritte 1) und 2) für jede unabhängige Signalquelle des Netzwerkes.
Man erhält wieder Teillösungen für die gleiche Netzwerkgröße.
{ 4) Überlagerung (Addition) aller berechneten Teillösungen zur Gesamtlösung.
Bild 2.3 zeigt ein weiteres Beispiel zur Anwendung dieses Verfahrens.
I L= 0
I1
I2
R1
R2
Ue1
IL
I1
R1
RL
U1
Ue2
I
I1
2
R2
Ue1
I L= 0
I
2
R2
R1
U1
U1
Ue2
Bild 2.3: Zur Anwendung des Überlagerungsverfahrens (Beispiel 2)
Das Netzwerk entsteht aus Bild 2.1 für Iq = 0, gesucht ist jetzt die Knotenspannung U1 . Dazu muß
diese Spannung als Variable in das Gleichungssystem eingeführt werden; dafür gibt es verschiedene
Möglichkeiten. Hier wird die Knotengleichung für Knoten 1 in modifizierter Form geschrieben,
d.h. die einzelnen Zweigströme werden durch Knotenspannungen und Widerstände ausgedrückt
(Ohmsches Gesetz). Diese Gleichung wird zusätzlich in das o.g. Gleichungssystem aufgenommen:
1
1 1
−R 1 R 2 0
0 −R 2 R L
0
0
0
0
0
0 ( 1 + 1 + 1 )
R1 R2 RL
.
I1
I2
IL
U1
=
Für die Knotenspannung U1 erhält man daraus U 1 = (
0
U e1 − U e2
U e2
U e1 U e2
+
R1
R2
U e1 U e2
+
)
R1
R2
.
1
R1
1
+
1
R2
+
1
RL
.
Für R L d ∞ bzw. I L = 0 folgt damit der bekannte Ausdruck für den unbelasteten Spannungsteiler
U1 = (
U e1 U e2
+
)
R1
R2
1
R1
1
+
1
R2
=
R2
R1
U +
U .
R 1 + R 2 e1 R 1 + R 2 e2
Wird auf die Bestimmung der Zweigströme von vornherein verzichtet, so brauchen sie auch nicht
im Gleichungssystem auftreten. Man erhält für IL = 0 einfacher U1 = U1 (Ue1)Ue2 = 0 + U1 (Ue2 )Ue1 = 0 .
14
2. Analyse elektronischer Schaltungen
Ersatzschaltungen elektronischer Schaltungen
Zur Analyse elektronischer Schaltungen können die bekannten Verfahren der Netzwerkanalyse
verwendet werden, wenn geeignete Ersatznetzwerke bestimmt werden können.
{ Ein Ersatznetzwerk (Ersatzschaltung) zeigt an den äußeren Klemmen das gleiche Verhalten
wie die Originalschaltung, besteht aber nur aus Netzwerkelementen wie R, L, C, gesteuerten
und ungesteuerten Quellen. Zur linearen Analyse werden lineare Ersatzschaltungen gefordert.
Das ist bei passiven Elementen (R, L, C) für viele Einsatzbereiche hinreichend erfüllt, da meist
Netzwerkelement = Bauelement gesetzt werden kann. Für eine netzwerkgerechte Beschreibung der
steuerbaren Elemente und Funktionseinheiten (Transistoren, Verstärker, analoge Schaltkreise, ...)
hingegen wird u.a. die Existenz eines geeigneten Arbeitspunktes (Gleichstromversorgung) und die
Einhaltung entsprechender Aussteuerungsbedingungen sowie Stabilität vorausgesetzt. Sie können
dann als sogenannte aktive Elemente aufgefaßt und mit Hilfe von gesteuerten Quellen und passiven
Bauelementen, vorzugsweise R und C, beschrieben werden.
{ Wird nur eine Wechselspannungsanalyse bezl. der angeschlossenen Signalquellen gefordert,
so werden die Klemmen für die Gleichstromversorgung mit dem Bezugsknoten (Masse,
GND) kurzgeschlossen. Dabei wird meist der Innenwiderstand Ri der Gleichstromversorgung
als verschwindend klein (Ri = 0) angenommen. Die Betriebsspannung verschwindet damit
typisch aus der Ersatzschaltung (vgl. auch Überlagerungsverfahren).
Bild 2.4 zeigt physikalisch interpretierbare Kleinsignal-Ersatzschaltbilder für Bipolartransistoren.
Bild 2.4 a) ergibt sich aus dem − Ersatzschaltbild nach Giacoletto und gilt bei niedrigen
Frequenzen für Kleinsignalaussteuerung eines Transistors. Für höhere Signalfrequenzen sollte man
z. B. auf die y-Parameter zurückgreifen (Bild 2.4 b).
B
S u BE
iB
r
u
BE
iC
r CE
BE
E
C
uCE
E
a) Kleinsignal-ESB nach Giacoletto
B
u BE
iB
y u
12 CE
y
11
y21uBE
iC
y22
C
u
CE
E
E
b) Kleinsignal-ESB mit y-Parametern
Bild 2.4: Kleinsignal-Ersatzschaltungen für Bipolartransistoren
Bei Anwendung des Knotenspannungsverfahrens oder daraus abgeleiteter Verfahren - z. B.
Signalflußgraphen (Mason-Graph, Normierter Masongraph) - eignen sich vor allem solche Modelle
bzw. Ersatzschaltungen, die unabhängige und spannungsgesteuerte Stromquellen verwenden.
Grundsätzlich wird für alle Funktionseinheiten (Transistor, Verstärker, ...) strukturell das gleiche
bzw. nur geringfügig modifizierte Ersatznetzwerk angewendet. Die entscheidende Aufgabe bei der
Modellbildung liegt in der Bestimmung geeigneter Parameter. Dazu gehören die Ermittlung der
Werte und Gültigkeitsbereiche (z. B. Kleinsignal-, Großsignalaussteuerung, Frequenzbereich, ...)
und die sinnvolle Interpretation dieser Kennwerte (Rein , Raus , Verstärkung, ...).
2. Analyse elektronischer Schaltungen
15
Verstärkermodelle
Das Signalverhalten eines Verstärkers kann oft hinreichend durch eine Zweitor-Ersatzschaltung
beschrieben werden. Als Kennwerte werden dabei im einfachsten Fall der Eingangswiderstand
und eine gesteuerte Quelle im Ausgangskreis
Z ein = 1 , der Ausgangswiderstand Z aus = 1
Y
Y
ein
aus
benötigt (Bild 2.5). Schaltungen mit symmetrischer Eingangsstufe (Differenzverstärker) haben
typisch Anwendungsvorteile, z. B. darf die Eingangsspannung Ue = Ud innerhalb des zulässigen
Gleichtaktaussteuerbereiches potentialmäßig schwimmen (vgl. Instrumentationsverstärker).
{ Die Zweitor-Ersatzschaltung beschreibt das Klemmenverhalten der Anordnung (ohmsches
Gesetz). Die konkrete innere Schaltung wird durch die Parameterwerte erfaßt.
Xe
z.B. F(p) =
Xa
F(p)
Ie
Ia
I*a
oder
Ze
Ue
I*a = YaV Ue
Ie
Ia
Za
Ua
VU e
V
1+pT
Ze
Za
Ue
Bild 2.5: Zweitor-Ersatzschaltung für Verstärkerschaltungen
U
CC
UCC
a
Ue
a
Ue1
Ue2
Ua
Ua
- U EE
B
Ue
C
e1
Za
Ze
Ua
E
VU e
a) unsymmetrischer Eingang
Ud
e2
a
Zd
Za
Ua
V Ud
b) symmetrischer Eingang
Bild 2.6: Verstärker-Eingangsstufen und ihre Zweitor-Ersatzschaltung
Ua
16
2. Analyse elektronischer Schaltungen
Durch Hinzufügen weiterer Quellen und passiver Bauelemente werden die realen Eigenschaften der
Schaltung ggf. noch besser nachgebildet. Durch eine ein- und ausgangsseitige RC-Beschaltung
kann z. B. auch das dynamische Verhalten einer Verstärkerschaltung modelliert werden (Bild 2.7).
Ue
C1
1
Ua
Ia
re
R1
ra
2
R2
C2
Ue
pC 1
yaV0
ye+ y1 + pC1
ya+ y2 + pC2
I a = ya V0 U12
Bild 2.7: Ersatzschaltung eines wechselspannungsgekoppelten Breitbandverstärkers und
zugehöriger Signalflußgraph (Normierter Mason-Graph)
Für die Übertragungsfunktion (Frequenzgang) dieser Anordnung erhält man
F o (p) =
U a (p)
pC 1 y a V 0
=
U e (p) (ye + y 1 + pC 1 )(y a + y2 + pC 2 )
R2
pC 1 (R 1 || r e )
pT u
V &0
ra + R 2
=
=
.
1 + pC 2 (R 2 || r a ) 1 + pC 1 (R 1 || r e ) 1 + pT o 1 + pT u
V0
Daraus ergeben sich die 3-dB-Frequenzen fu und fo und damit die Bandbreite B = fo - fu
1
fu = 1
;
2 C 1 (R 1 || r e )
1
fo = 1
2 C 2 (R 2 || r a )
Für einen Gleichspannungsverstärker entfällt das RC-Glied R1 , C1 am Eingang und es gilt fu = 0.
2. Analyse elektronischer Schaltungen
2.2
17
Knotenspannungsanalyse linearer Netzwerke
Zur systematischen Berechnung von Spannungen und Strömen in einem elektrischen Netzwerk
eignet sich u.a. die Knotenspannungsmethode. Sie führt bei einem Netzwerk mit z Zweigen und k
Knoten auf k-1 unabhängige Knotengleichungen, aus denen sich k-1 Knotenspannungen berechnen
lassen. Bei Bedarf können daraus in einem zweiten Schritt die z Zweigströme ermittelt werden.
Vorteile im Rechenaufwand ergeben sich für Netzwerke mit z > k, also für vermaschte Netzwerke.
Ein wesentlicher Vorteil gegenüber anderen Analyseverfahren, z. B. Maschenstromanalyse, besteht
im einfachen Algorithmus zum Erstellen des linearen Gleichungssystems in Form der sogenannten
Admittanzmatrixgleichung. Der allgemeine Rechenweg läßt sich kurz wie folgt charakterisieren:
{ Alle (realen) Spannungsquellen im Netzwerk sind in äquivalente Stromquellen zu wandeln.
Gesteuerte Spannungsquellen sind entsprechend in spannungsgesteuerte Stromquellen zu
transformieren.
{ Fortlaufende Durchnumerierung und Bezeichnung aller k Knoten des Netzwerkes.
{ Festlegung eines gemeinsamen Bezugsknotens für alle Knotenspannungen (meist Um = 0) und
die Knotenspannungsgleichungen aufstellen.
{ Das Gleichungssystem nach den k-1 unbekannten Knotenspannungen auflösen.
2.2.1 Knotenspannungsgleichungen
Nach dem Kirchhoff'schen Knotensatz gilt für jeden Knoten k eines elektrischen Netzwerkes:
{ Die vorzeichenbehaftete Summe aller in diesem Knoten fließenden Ströme ist Null ( i k = 0).
{ Typisch wird vereinbart, vom Knoten k wegfließende Ströme positiv zu bewerten (Bild 2.8).
IG
i 2 R2
1
2
i 23
i1
R1
1:
2:
3:
i3
R3
i1 + i2 − IG
i 3 + i 23 − i 2
I G − i 1 − i 3 − i 23
= 0
= 0
= 0
mit i 23 = S . (U 1 − U 3 )
3
Bild 2.8: Elektrisches Netzwerk, Knotengleichungen
Nach der Knotenspannungsmethode wird jeder Zweigstrom i i j zwischen den Knoten i und j durch
die Knotenspannungen Ui und Uj bzw. die Zweigspannung Ui j = Ui - Uj und die zwischen beiden
Knoten angeschaltete Admittanz (Leitwert) yij = R1 beschrieben (vgl. Bild 2.9):
ij
i i j = yi j . U i j = yi j . (U i - U j ).
Ordnet man gleichzeitig nach inneren (abhängigen) und äußeren (unabhängigen) Strömen, so folgt:
i1 + i2
= IG
__
>
y1 (U1 - U3 ) + y2 (U1 - U2 )
i3 + i23 - i2 = 0
__
>
y3 (U2 - U3 ) + S (U1 - U3 ) - y2 (U1 - U2 ) = 0
- i1 - i3 - i23 = - IG
__
>
- y1 (U1 - U3 ) + y3 (U2 - U3 ) - S (U1 - U3 )
= IG
= - IG .
18
2. Analyse elektronischer Schaltungen
Allgemein kann jeder Zweigstrom i k l zwischen den Knoten k und l durch die Knotenspannungen
U1 und Uj bzw. die Zweigspannung Ui j = Ui - Uj und eine sogenannte Steueradmittanz S
beschrieben werden (Bild 2.9 a):
i k l = S . U i j = S . (U i - U j ).
{ Im Spezialfall passiver Elemente (R, L, C) gilt i = k und j = l. Für die Steueradmittanz S
ergibt sich in diesem Fall der Leitwert y (Admittanz) des entsprechenden Elementes zwischen
den Knoten (i, k) und (j, l).
{ Passive Elemente können danach als selbstgesteuerte, aktive Elemente als fremdgesteuerte
Stromquellen bezeichnet und beschrieben werden.
i
S
k
i kl = - i lk
k, i
i kl
y
l, j
Ui j
U ij
j
Ui
l
i kl = - i lk = S U ij
0
1
)
y = 1 (pC,
R
pL
Uj
i kl = S Ukl = y (U i - U j )
spannungsgesteuerte Stromquelle
passives Bauelement
Bild 2.9: Netzwerkdarstellung spannungsgesteuerter Ströme
Bei dieser Vorgehensweise erhält man für ein Netzwerk mit k = m Knoten genau m Gleichungen
für die m abhängigen Variablen U1 , ..., Um (Knotenspannungen). Ordnen wir das Gleichungssystem
nach aufsteigenden Indizes der Variablen, so ergibt sich das Ohmsche Gesetz in Matrixform, die
sogenannte Admittanzmatrixgleichung
Y.U = I
mit
Y - Admittanzmatrix (Koeffizientenmatrix),
U - Vektor der abhängigen Variablen (Knotenspannungen),
I - Vektor der Erregerströme (Einströmungen, unabhängige Stromquellen).
Beispiel:
Für das Netzwerk in Bild 2.8 erhält man so die Admittanzmatrixgleichung zu
Knoten 1
Knoten 2
Knoten 3
y1 + y 2
−y2 + S
−y1 − S
−y 2
y 2 + y3
−y 3
−y1
− y3 − S
y1 + y3 + S
*
U1
U2
U3
=
IG
0
−I G
.
{ Dieses Matrix-Gleichungssystem läßt sich unmittelbar aus dem Netzwerk ermitteln. Eine
allgemeine Bildungsregel wird nachfolgend angegeben.
2. Analyse elektronischer Schaltungen
2.2.2
19
Allgemeine Bildungsregel für die Admittanzmatrixgleichung
Für das Aufstellen der Admittanzmatrixgleichung läßt sich eine allgemeine Bildungsregel angeben.
Damit kann das Gleichungssystem formal und unmittelbar aus dem Netzwerk aufgestellt werden.
Zweckmäßig werden zuerst die passiven Elemente und die unabhängigen Stromquellen, danach die
spannungsgesteuerten Stromquellen notiert.
Y
U
t 11 −t 21 −t 31 ... ... −t m1
−t 12 t 22 −t 32 ... ... −t m2
:
:
:
:
:
:
:
:
:
:
:
:
−t 1m −t 2m −t 3m ... ... t mm
*
U1
U2
:
:
:
Um
=
I
=
I1
I2
:
:
:
Im
1) Knoten des Netzwerkes numerieren und Knotenspannungen in entsprechender Reihenfolge im
Vektor U notieren (meist wird dem Bezugspunkt Masse der Index 0 fest zugeordnet).
2) Die Hauptdiagonalelemente n i = t i i der Admittanzmatrix Y erhält man als Summe aller am
Knoten i angeschlossenen passiven Admittanzen yj i , also t ii = n i = yj i .
3) Die Nebenelemente tj i entsprechen dem Wert der passiven Admittanz zwischen benachbarten
Knoten i und j und werden stets mit negativem Vorzeichen in der Matrix Y notiert (tj i = - yj i ). Die
Zeilen- und Spaltensummen in der vollständigen Admittanzmatrix Y sind stets Null. Es gilt
− t j i = t i i = n i , − t ij = t ii = n i ,
j
i
ti j = tj i .
4) Die Elemente des Erregervektors sind identisch mit der unabhängigen Stromquelle Iq , die am
entsprechenden Knoten k angeschaltet ist. Das Vorzeichen ist positiv, wenn der Strom in den
Knoten k hinein fließt und negativ bei umgegehrter Stromrichtung. Ist keine Stromquelle am
Knoten angeschlossen, so wird Null eingetragen. Zu beachten ist, daß jede Stromquelle zwischen
zwei Knoten fließt und damit im Erregervektor je einmal mit positivem und negativem Vorzeichen
m−1
erscheint. Die Spaltensumme im Erregervektor I ist stets Null ( Ii = − I m ).
i=1
5) Die Wirkung der spannungsgesteuerten Stromquellen i k l = S . Ui j wird durch ein sogenanntes
Steueradmittanzrechteck erfaßt. Dafür gilt folgender Formalismus:
Befindet sich in einem Netzwerk mit den Knoten i, j, k, l c 0, 1, ..., m der Folgen 0, 1,.., k, l, .., m
und 0, 1, ..., i, j, ..., m eine spannungsgesteuerte Stromquelle ik l = S . Ui j , so entsteht in der Admittanzmatrix Y gleicher Indexfolge für Spalten und Zeilen ein durch die Zeilen k und l sowie durch
die Spalten i und j aufgespanntes Steueradmittanz-Rechteck. In seiner Hauptdiagonale steht die
Steueradmittanz S mit positivem und in seiner Nebendiagonale mit negativem Vorzeichen.
i
j
k . +S ... −S .
. . ... . .
l . −S ... +S .
Eine ungeradzahlige Vertauschung der Indexfolgen ( i, j ) bzw. ( k, l )
führt zum Vorzeichenwechsel für S in der angegebenen Regel 5.
Für die passiven Elemente gilt Regel (5) in gleicher Weise, läßt sich
aber wegen i = k , j = l einfacher ausführen (vgl. Regeln 2 und 3).
20
2. Analyse elektronischer Schaltungen
Das Gleichungssystem mit m Gleichungen und m Variablen (Knotenspannungen) ist mathematisch
ein unbestimmtes System und wird deshalb unbestimmte Admittanzmatrixgleichung genannt.
{ Die Zeilen- und Spaltensumme der Elemente in der Admittanzmatrix ergibt stets Null, damit
läßt sich eine Zeile (Knotenstrom Ik ) als Linearkombination der anderen Zeilen darstellen.
Eine Folge davon ist, daß die Systemdeterminante von Y Null ist (det Y = | Y | = 0).
Ein bestimmtes und damit lösbares Gleichungssystem entsteht, wenn eine beliebige Variable Um = c
vorgegeben wird (c = konst., frei wählbar). Man erhält nun ein Gleichungssystem mit m-1 linear
unabhängigen Gleichungen für m-1 Variable, die sogenannte bestimmte Admittanzmatrixgleichung
Y& Bm
0 1
*
Up
Um
=
Iq
c
.
{ Meist wird Um = 0 gewählt und dieses Potential dem Masseknoten m (Bezugspotential) des
Netzwerkes zugeordnet. Praktisch kann man die m-te Zeile und die m-te Spalte streichen und
das dann verbleibende Gleichungssystem Y* . U P = I q lösen.
Allgemein gilt:
UP =Y
-1
( Iq - Bm Um )
mit
Y
-1
Y&
= det Y & ,
Um = c.
Eine bestimmte Variable Ui aus dem Spaltenvektor U p erhält man nach der Cramer'schen Regel
det Y &i
aus dem Verhältnis von zwei Determinanten U i =
.
det Y &
Dabei entsteht die sogenannte Signaldeterminante det Y &i aus der Systemdeterminante det Y*,
indem man die i-te Spalte dieser Systemdeterminante durch den Erregervektor I q ersetzt.
Wird für das o.g. Beispiel U3 = 0 gewählt, so folgt für die bestimmte Admittanzmatrixgleichung
y1 + y2
−y2
−y2 + S y2 + y 3
U 1 = IG
y2 + y 3
,
N
U1
U2
U 2 = IG
=
y2 − S
N
IG
0
und daraus
mit N = (y1 + y 2 )(y 2 + y3 ) − y2 (y2 − S) .
Für sehr große Werte von S gilt dann (vgl. auch Abschnitte 2.2.3 und 3)
U1 |Sd∞ = 0 ,
U2 | Sd ∞ = −I G R 2 .
In Tafel 2.1 sind Admittanzmatrix-Korrespondenzen für einfache Netzwerkelemente angegeben.
Mit ihrer Hilfe läßt sich die Admittanzmatrix-Gleichung unter der Beachtung der Rechenregeln für
Matrizen komponentenweise erstellen (Überlagerungsverfahren).
2. Analyse elektronischer Schaltungen
Netzwerkelement
21
Admittanzmatrix-Gleichung
k
Unabhängige ideale
Stromquelle Iq
(Einströmung)
I q= Ikl
k
l
0 ... 0
0 ... 0
i
j
+y ... −y
−y ... +y
k
l
+yi ... −yi
−yi ... +yi
Uk
Ul
−I q
+I q
=
l
i
passives Element
Admittanz y
I ij
y
Uij
y=1
R
j
Unabhängige reale
Stromquelle Iq
Ui
Uj
0
0
=
k
Iq
Uk
Ul
=
−I q
+I q
yi
Überlagerung von idealer Stromquelle
l
Unabhängige reale
und passivem NW-Element
Uq
yi
k Iq
l
Spannungsquelle Uq
k
l
Iq
k
+yi ... −yi
−yi ... +yi
Uk
Ul
=
+yi U q
−yi U q
l
Umformung in
reale Stromquelle
spannungsgesteuerte
Stromquelle
yi
i
k
Ui
I kl
S
Ikl = S . Uij
U ij
j
Uj
l
I lk
i
j
k
l
+S −S 0 0
−S +S 0 0
I lk = - I kl
Tafel 2.1: Admittanzmatrix-Korrespondenzen für einfache Netzwerkelemente
=
Ui
Uj
Uk
Ul
=
0
0
0
0
22
2. Analyse elektronischer Schaltungen
2.2.3
Grenzwertbetrachtungen in der Admittanzmatrixgleichung
Grenzwertbetrachtungen spielen bei Analyse und Entwurf elektronischer Schaltungen eine wichtige
Rolle (Vereinfachungen, Empfindlichkeitsanalysen, Modellbildung). Hier wird unter Grenzwert
verstanden, daß ein Parameter der Netzwerkfunktion im Vergleich zu anderen Parametern als sehr
groß/klein angesehen werden kann. Der Vorteil solcher Grenzwertbetrachtungen liegt in dem meist
wesentlich verringerten Lösungsaufwand und der einfacheren Interpretation der Lösung.
Allgemein lassen sich Zählerpolynom Z und Nennerpolynom N einer Netzwerkfunktion T stets als
lineare Funktion eines Netzwerkelementes y bzw. dessen Komponenten xv angeben:
Z1 + y Z2
T(y) = Z =
.
N N1 + y N2
Z
Als Grenzwerte erhält man daraus lim
T(y) = 1 ;
yd 0
N1
lim
T(y) =
yd ∞
Z2
.
N2
Die schaltungstechnisch interessanten Grenzwerte eines Netzwerkelementes (y d 0 bzw. y d ∞)
können unmittelbar in der Admittanzmatrixgleichung (vor deren Lösung) berücksichtigt werden.
Dabei ändern sich die algebraischen Ausdrücke für Elemente der Matrix, die Anzahl von
Gleichungen und Knotenspannungen bleibt aber erhalten (strukturinvariante Transformation). Die
Komponenten xv des Elementes y treten dabei i.a. in zwei Knotengleichungen i und j auf.
Grenzwert Null
Der Grenzwert y d 0 läßt sich einfach in der Admittanzmatrixgleichung einführen, es entsteht die
Matrixgleichung für das Netzwerk ohne das Element y. Formal entsteht die neue Matrixgleichung,
indem für alle Elemente der originalen Admittanzmatrixgleichung der Grenzübergang y d 0 vollZ
zogen wird. Die Lösung dieses umgeformten Gleichungssystems liefert T & = N1 .
1
Grenzwert Unendlich
Die neuen algebraischen Bewertungen der Matrixelemente erhält man durch Modifikation der
Elemente der Knotengleichungen i und j, wenn das Netzwerkelement zwischen den Knoten i und j
angeschlossen ist (vgl. auch Tafel 2.2).
{ Gleichung i:
Alle Elemente der i-ten Zeile der Admittanzmatrix Y werden partiell nach y
{ Gleichung j:
(bzw. xv ) differenziert: t &ki = yki , k = 1, ..., m .
Die Elemente der j-ten Zeile ändern sich nach folgender Vorschrift:
t
t &jj = t jj − t ji, t &kj = t kj + t ki für k ! i, j, t &ij = t ij − t ii .
{ Erregervektor I: Die Elemente des Erregervektors I (Einströmungen, Stromquellen) der
Zeilen i und j ändern sich wie folgt: t &qi =
t qi
, t &qj = t qj + t qi .
y
Treten die Komponenten des Netzwerkelementes y nur in einer Zeile der Matrixgleichung auf, so
werden für eine strukturinvariante Transformation die für Knoten i angegebenen Vorschriften
angewendet. Die Lösung des so umgeformten Gleichungssystems liefert die Netzwerkfunktion T*
Z
mit T & = N2 .
2
2. Analyse elektronischer Schaltungen
23
Tafel 2.2 zeigt die bestimmte Admittanzmatrixgleichung für verschiedene Idealisierungsstufen am
Beispiel einer massebezogenen spannungsgesteuerten Stromquelle (vgl. auch Abschnitt 3: Idealer
Operationsverstärker).
spannungsgesteuerte Spannungsquelle
(idealisierter Operationsverstärker)
s-
s+
s-
-
Ia r a
+
o
Ua = F o(Us+ - Us- )
I a = ya U a
−S +S y a −ya
0 0 0
1
U s+
U s−
Uo
Um
=
−F o +F o 1 −1
0
0 0 1
U s+
U s−
Uo
Um
=
−ya +ya 0
0 0 0
0
1
U s+
U s−
Uo
Um
=
0
1
U s+
U s−
Uo
Um
=
o
s+
Admittanzmatrix-Gleichung
+
Ua = Fo(Us+- U s-)
Fo d ∞
S = (ya F o ) d ∞
−1 +1 0
0
0 0
0
0
0
0
0
0
0
Tafel 2.2: Bestimmte Admittanzmatrixgleichungen für idealisierte OPV bzw. spannungsgesteuerte
Strom-/Spannungsquelle bei verschiedenen Idealisierungsstufen
Zur Veranschaulichung des Verfahrens wird ein Beispiel einer Verstärkerschaltung angegeben
(invertierende Operationsverstärkerschaltung, vgl. auch Abschnitte 1 und 3). Bild 2.10 zeigt die
entsprechenden Ersatznetzwerke.
24
2. Analyse elektronischer Schaltungen
R2
R1
Ue
ra
1
o
2
3
o
Ia
2
Ua
R3
y2
Ie 1
y1
Uo
3
Ie = y1 Ue
Ua = F0 ( U2 - U 1 )
y3
ya
I a = yaUa
Bild 2.10: Beispiel zur Netzwerkanalyse mit Admittanzmatrixgleichung
Für die unbestimmte Admittanzmatrixgleichung folgt mit S = ya F0
y1 + y2
0
−y2 + S
−y1 − S
0
y3
−S
− y3 + S
−y2
−y 1
0
−y 3
y2 + y a
−ya
− ya
y1 + y 3 + y a
U1
U2
UO
U3
=
y1 U e
0
0
−y1 U e
.
Durch Streichen der Bezugsknotengleichung (hier Knoten 3) und der entsprechenden Spalte ergibt
sich die bestimmte Admittanzmatrixgleichung:
y1 + y2
0
−y2 + S
0
y3
−S
− y2
0
y2 + ya
U1
U2
UO
=
y1 U e
0
0
.
Daraus kann z. B. die Ausgangsspannung UO ermittelt werden
UO =
− y1 U e y3 (−y2 + S )
.
y 3 (y1 + y2 )(y 2 + ya ) − y2 y3 (−y2 + S )
R
Für sehr große Werte von S = ya F0 folgt daraus UO | Sd ∞ = − R 2 U e .
1
Wird die Grenzwertbetrachtung nach o.g. Algorithmus vor der Lösung des Gleichungssystems in
der bestimmten Admittanzmatrixgleichung berücksichtigt, so vereinfachen sich einzelne Elemente
der Matrixgleichung oder fallen sogar weg (es entstehen Nullelemente). Für das gewählte Beispiel
ergibt sich die bestimmte Admittanzmatrixgleichung für S = ya F0 d ∞ zu
y1 + y2
0
1
0
y3
−1
− y2
0
0
U1
U2
UO
=
y1 U e
0
0
.
Als Lösung für die Ausgangsspannung UO erhält man (wie oben, aber einfacher)
− y 1 y3
R
UO | Sd ∞ = y2 y3 U e = − R 2 U e .
1
2. Analyse elektronischer Schaltungen
2.2.4
25
Analyse von Netzwerken mit mehreren Signalquellen
Nach dem Superpositionsprinzip ergibt sich in einem linearen System mit mehreren
Eingangsgrößen die Ausgangsgröße aus der Überlagerung der einzelnen Teilwirkungen. Bei der
Beschreibung eines Netzwerkes mitttels Admittanzmatrixgleichung erhält man in diesem Fall für
jede Eingangsgröße formal einen eigenen Erregervektor I1 , ..., In . Zur Lösung des
Gleichungssystems müssen nun die einzelnen Signaldeterminanten Y &i (I n ) ermittelt werden,
während die Systemdeterminante |Y*| für alle Teilübertragungen gleich ist und nur einmal bestimmt
werden braucht. Praktisch kann man die Komponenten der verschiedenen Eingangsgrößen auch in
einem Vektor zusammenfassen.
Erweitert man das Netzwerk aus Bild 2.10 um die beiden Eingangsströme Ie+ und Ie- (Bild 2.11), so
ändert sich die unbestimmte Admittanzmatrixgleichung durch zwei zusätzliche Erregervektoren.
y2
1
I e-
Ie
I e+
o
Ia
2
y1
ya
y3
I a = ya F 0 (U 2 − U 1 )
3
Bild 2.11: Netzwerk mit mehreren Eingangsströmen
y1 + y2
0
−y2 + S
−y1 − S
−y2
−y 1
0
−y 3
y2 + y a
−ya
− ya
y1 + y 3 + y a
0
y3
−S
− y3 + S
U1
U2
UO
U3
.
=
y1 U e
0
0
−y1 U e
+
I e−
0
0
−I e−
Die bestimmte Admittanzmatrixgleichung ergibt sich daraus zu
y1 + y2
0
−y2 + S
− y2
0
y2 + ya
0
y3
−S
.
U1
U2
UO
=
y1 U e
0
0
+
I e−
0
0
+
0
I e+
0
bzw.
y1 + y2 0 −y2
0
y3 0
1
−1 0
.
U1
U2
UO
=
y1 U e
0
0
+
I e−
0
0
+
0
I e+
0
für S d ∞ .
Für die Knotenspannungen erhält man so folgende Lösungen:
Uo =
− y1 y3 U e − y3 I e− + (y1 + y2 )I e+
R
R
= − 2 U e − R 2 I e− + R 3 (1 + 2 )I e+ ,
y2 y3
R1
R1
y2 I e+
U 1 = y2 y3
y2 I e+
= R 3 I e+ , U 2 = y2 y3
= R 3 I e+ .
{ Damit folgt auch U2 = U1 (vgl. Abschnitt 3: idealer OPV).
+
0
I e+
0
−I e+
.
26
2.2.5
2. Analyse elektronischer Schaltungen
Analyse von RC-OPV-Schaltungen im Frequenzbereich
Wird das Ein- und/oder Gegenkopplungsnetzwerk einer gegengekoppelten Verstärkerschaltung mit
frequenzabhängigen Bauelementen (Kapazität, Induktivität, ...) realisiert, so entsteht ein frequenzbzw. zeitabhängiges Übertragungsverhalten der Schaltung (vgl. auch Abschnitte 1, 5).
Die Analyse dieser dynamischen Schaltungen läßt sich ebenfalls effektiv mit Hilfe der
Admittanzmatrixgleichung durchführen. Dazu werden die passiven Elemente Kapazität C bzw.
Induktivität L wie die ohmschen Widerstände R als Leitwert beschrieben (frequenzabhängig):
Y R = 1 , Y C = pC , Y L = 1 .
R
pL
Der wesentliche Vorteil dieser Beschreibungsform liegt darin, daß ein lineares Gleichungssystem
im Frequenzbereich p entsteht. Zur Lösung stehen so alle Verfahren der linearen Algebra zur
Verfügung. Der Übergang in den Zeitbereich gelingt mit den bekannten Transformationen. Die
explizite Lösung von Differentialgleichungen wird damit umgangen. Oft läßt sich das Zeitverhalten
aus der Frequenzbeschreibung auch durch Anwendung einfacher Grenzwertsätze abschätzen.
Bei der Analyse der einzelnen Schaltungen mittels Admittanzmatrixgleichung wird wieder zunächst
von idealen Verstärkereigenschaften ausgegangen. Für viele praktische Fälle reicht dieser Ansatz
aus. Die Abweichungen infolge realer Kennwerte können, wenn überhaupt nötig, danach mit
entsprechend aufwendigeren Modellen analysiert werden (vgl. Abschnitt 3: idealer OPV).
C2
R2
R1
C1
-
Ue
-
+
Uo
Ue
+
Uo
Differenzierer
Integrator
Bild 2.12: Integrierer und Differenzierer (Prinzipschaltungen)
Bei Annahme idealer OPV ergeben sich die bestimmten Admittanzmatrixgleichungen zu
y1 + pC 2 −pC 2
1
0
U1
Uo
=
pC 1 + y 2 −y2
1
0
y1 U e
0
U1
Uo
=
pC 1 U e
0
Die Auflösung nach der Ausgangsspannung Uo liefert
Uo = −
y1
Ue
U = −
pC 2 e
pC 2 R 1
bzw.
pC 1
U o = − y 2 U e = − pC 1 R 2 U e .
Die Lösungen im Zeitbereich erhält man daraus durch Rücktransformation:
U o (t) = −
1 ¶t U dt + U (0 )
o
C2R1 0 e
bzw.
U o (t ) = − C 1 R 2
dU e
.
dt
2. Analyse elektronischer Schaltungen
2.3
27
Zur Knotenspannungsanalyse nichtlinearer Netzwerke
Bei der Analyse bzw. Simulation komplexer elektronischer Schaltungen mit den Methoden der
Netzwerktheorie entstehen leicht umfangreiche Gleichungssysteme, deren Lösung sehr aufwendig
werden kann. Das gilt insbesondere dann, wenn nichtlineare Gleichungen enthalten sind.
{ Hier hilft i.a. nur der Einsatz geeigneter Circuit-Simulatoren, z. B. PSPICE.
Simulationswerkzeuge sind für den Anwender "Meßsysteme". Ihr richtiger und geeigneter Einsatz
erfordert ein hinreichendes Verständnis von der grundsätzlichen Funktions- und Arbeitsweise
dieser Werkzeuge. Hier kann nur ein kurzer Einblick in die Probleme der Analyse nichtlinearer
Gleichungen gegeben werden. Für weitergehende Betrachtungen wird auf die Fachliteratur
verwiesen /12/.
Bild 2.13 veranschaulicht das Verfahren zur iterativen Lösung der nichtlinearen Gleichung g(z) = 0
nach der bekannten Newton-Raphson-Methode.
{ Die Netzwerkanalyse nichtlinearer elektronischer Schaltungen im Zeitbereich erfordert die
Lösung eines nichtlinearen Differentialgleichungssystems.
{ Durch Zeitdiskretisierung und Linearisierung der nichtlinearen Schaltungselemente erhält
man daraus ein lineares Gleichungssystem, das iterativ gelöst wird.
g(z)
g[z(1) ] = A * [z(1) - z (2) ]
Linearisiertes Gleichungssystem:
g z +
Øg
Øz
z =0
Iterationsschleife (Zeitschritt n):
Øg
Øz
z(2)
z(3)
z(4)
z (1)
z
z
(i+1 )
=
Øg (i)
Øz
z (i) − g z (i )
Zeitschleife:
Øg
Øz
z
(i+1 )
n+1
=
Øg (i)
Øz
i)
z (n+1
− g z n+1 (i)
Abbruchkriterium:
z (i+1 ) − z i [ .
Bild 2.13: Zur Nullstellenbestimmung nach der Newton-Raphson-Methode /12/
Der Lösungsalgorithmus enthält im Inneren zwei Iterationsschleifen:
{ Iterationsschleife mit dem Laufindex i (Iterationsschritt)
{ Iterationsschleife mit Laufindex n (Zeitschritt).
Das Know-how eines Lösungsverfahrens steckt zum einen in der geeigneten Linearisierung der
Modellgleichungen und zum anderen in der vorteilhaften Steuerung der Iterations- und Zeitschleife.
Wichtig ist u.a. eine adaptive Anpassung der Schrittweite an die Änderungen der Signalformen. Ein
dafür sehr leistungsfähiger Algorithmus ist im Circuit-Simulator SPICE eingesetzt.
28
2. Analyse elektronischer Schaltungen
Diese prinzipielle Darstellung verdeutlicht die hohen Anforderungen an einen Circuit-Simulator für
zeitkontinuierliche Lösungen. Daraus wird auch verständlich, daß mit Circuit-Simulatoren i.a. nur
Schaltungen relativ geringer Komplexität simuliert werden können. Die Grenzen sind einmal durch
die benötigte Rechenzeit gegeben. Andererseits entstehen bei großen Schaltungen naturgemäß auch
viele Ausgangs- bzw. Zwischensignale, deren Zuordnung und Verifikation der Entwickler
bewältigen muß. In diesem Zusammenhang spielen z. B. auch Verfahren zur Dekomposition
(Zerlegung) eines Netzwerkes eine große Rolle.
Modellierung der Netzwerkelemente
Jedes nichtlineare Netzwerkelement wird durch Linearisierung und Zeitdiskretisierung in einen
Leitwert (Admittanz) mit der Beschreibung Y*Un = In (Ohmsches Gesetz) überführt.
{ Es wird also für jeden Zeitschritt n in jedem Iterationsschritt i ein linearisiertes Element in der
Form {y ( i )eq ; I( i )eq } beschrieben. Dabei spielt sowohl die Schrittweite tn als auch deren
Steuerung während der Simulation eine wichtige Rolle.
Bild 2.14 zeigt das Prinzip der Linearisierung am Beispiel einer Diodenkennlinie. In Tafel 2.3 ist
zusammenfassend die Modellierung und Linearisierung für die Elemente Widerstand R, Kapazität
C, Induktivität L und Diode D dargestellt.
ID
f ( UD )
i
yeqi
ID
i
UD
UD
= (
df n
)U i
dU D
I eqi (n) = f (U Di ) − yeqi U Di
i
I eq
Bild 2.14: Prinzip der Linearisierung von Netzwerkelementen (Beispiel Diode)
Für Transistoren wird grundsätzlich in gleicher Weise verfahren, allerdings sind die Modelle für
Bipolar- und Feldeffekttransistoren typisch wesentlich umfangreicher.
{ So enthält z. B. das im Circuit-Simulator von PSPICE verwendete Gummel-Poon-Modell für
Bipolartransistoren ca. 40 Modellparameter, um das reale Verhalten für alle Anwendungen
hinreichend genau zu beschreiben. Erfaßt werden damit sowohl die üblichen schaltungstechnischen als auch technologisch wichtige Parameter.
Bild 2.15 zeigt eine Schaltung mit einem nichtlinearen Element am Beispiel einer HL-Diode, deren
Beschreibung nach Bild 2.14 gewählt wurde und die zugehörige Admittanzmatrixgleichung.
2. Analyse elektronischer Schaltungen
Element
IR
Beschreibung
k
IR
= Y. UR
Y . U R (n) = I R (n)
R
mit Y = 1
R
l
IC
dQ C
dU C
=
dt
dt
C U (n) = I (n) + C U (n − 1)
C
tn C
tn C
IC
k
C
= C
l
IL
dI
L L
dt
L
U L (n) = t I L (n) − tL I L (n − 1)
n
n
k
UL
L
=
l
ID
k
D
k
yieq UD (n) = I D (n) − I ieq (n)
I eq
yeq
l
l
Tafel 2.3: Modellierung und Linearisierung von Netzwerkelementen
C1
I1
I eq
1
R1
2
R2
D
C2
y
yieq UD,n = I D,n − I ieq,n
eq
m
Dioden - ESB
C
Y 1 + Y 2 + $1
C
−(Y 2 + $1 )
C
−(Y 2 + $1 )
C +C
Y 2 + y ieq + 1 $ 2
U1
=
*
U2
C
I 1 + $1 U C1, n − 1
C
C
−I ieq − $1 U C1,n−1 + $2 U C2,n−1
Bild 2.15: Admittanzmatrixgleichung mit nichtlinearem Netzwerkelement
29
30
2. Analyse elektronischer Schaltungen
2.4
Modifizierte Knotenspannnungsanalyse (MNA)
Das einfache Knotenspannungsverfahren entsprechend Y . U = I (vgl. Abschnitt 2.2) besitzt für die
formale Bestimmung der Netzwerkgleichungen einige Nachteile, z. B.
{ ideale Spannungsquellen können i.a. nicht direkt erfaßt werden (Grenzwerte, Einfügen
zusätzlicher Widerstände zur Umwandlung in Stromquellen),
{ Induktivitäten bewirken im Gleichstromfall (DC-Analyse) einen unendlichen Leitwert,
{ Kurzschlüsse zwischen Knoten erfordern i.a. ein neues Gleichungssystem.
Die sogenannte Modifizierte Knotenspannungsmethode (MNA - modified nodal analysis) umgeht
diese Nachteile durch eine erweiterte Formulierung der Netzwerkgleichungen, allerdings entsteht
ein z. T. weit umfangreicheres Gleichungssystem. Die damit verbundene größere Rechenzeit kann
durch geeignete Algorithmen in verträglichen Grenzen gehalten werden. Die MNA-Methode ist
durch den im Circuit-Simulator SPICE eingesetzten Algorithmus gegenwärtig sehr weit verbreitet.
Die Matrix-Gleichung der MNA-Methode wird schematisch in Blockstruktur aufgebaut:
Y
B
U
I
C
.
=
*
D
J
E
Auf der rechten Seite des Gleichungssystems stehen wieder die Erregungen (Signalgeneratoren) in
Form von Strömen I und als Erweiterung Spannungsquellen E als unabhängige Variable. Als
abhängige Variable treten jetzt die Knotenspannungen U und die (gewählten) Zweigströme J auf.
{ Es wird grundsätzlich zwischen Knotenspannungsgleichungen und Zweigstromgleichungen
unterschieden.
Knotenspannungsgleichungen
Y
Y
B
C,D
J
*
U
=
I
Zweigstromgleichungen
B
C D
*
U
J
=
E
- Admittanzmatrix (reduzierte Form gegenüber dem einfachen Verfahren),
- Koeffizientenmatrix der Knotengleichungen,
- Zweigstromrelationen Ji (durch Knotenspannungen ausgedrückt),
- Vektor der ausgewählten Zweigströme Ji .
Die Hinzunahme der Zweigstromgleichungen in das Gleichungssystem ermöglicht es u.a., auf eine
Umwandlung von Spannungsquellen in Stromquellen zu verzichten. Dazu werden die Ströme durch
ideale Spannungsquellen als unbekannte Größen aufgefaßt und berechnet.
{ Die unendlich großen Innenleitwerte idealer Spannungsquellen werden bei Additionen der
Leitwerte zu Leitwertkoeffizienten (Hauptdiagonalelemente, Normierungen) unterdrückt.
{ Eine Kurzschlußbrücke zwischen zwei Knoten mit dem Widerstand R = 0 kann durch eine
ideale Spannungsquelle Uq = 0 ersetzt werden. Damit lassen sich Ströme durch widerstandslose Verbindungsleitungen unmittelbar ohne weitere Umformungen beschreiben.
2. Analyse elektronischer Schaltungen
31
k
J (n)
Y
J (n)
C
JL(n)
C
L
R
+
JE (n)
JI (n)
E
Iq
1
2
Netzwerkelement
Widerstand R,
Leitwert Y
3
4
Knotenspannungsgleichung
Zweigstromgleichung
(Strom ist unabhängige Variable)
(Strom ist abhängige Variable)
y
−y
Uk
−y
0
=
.
U1
y
0
1
−1
y −y −1
Uk
. U1
JY
=
−1
1
1
Uk
. U5
JI
=
−1
Uk
1 . U4
JE
1 −1
=
+I q
Uk
Stromquelle I
=
.
−I q
U5
Spannungsquelle E
1
−1
1 −1 − L
$
Induktivität L
Kapazität C
5
C
$
−C
$
−C
$
C
$
Uk
=
.
U2
C U n−1
$
n−1
−C
$U
1
−1
C − C −1
$
$
Für den Strom durch die Kapazität C gilt:
C n
.
n−1
i C (t) = C
$ [U C (t n ) − U C (t n−1 ) ] = Q C = $ (U − U )
Tafel 2.4: MNA-Matrixgleichung elementarer Netzwerkelemente
Uk
. U3
J nL
Uk
. U2
J nC
0
0
0
Iq
E
=
n−1
−L
$ JL
=
0
0
C U n−1
$
32
2. Analyse elektronischer Schaltungen
Allgemeine Bildungsregel der MNA-Matrixgleichung
1) Durch B . J = 0 werden bei der MNA-Methode die Knotengleichungen in der Form I k = 0
dargestellt. Die Elemente der Matrix B erhält man formal aus der komponentenweise partiellen
Ableitung der einzelnen Kirchhoffschen Knotengleichungen bzgl. der zusätzlichen Stromvariablen.
{ Die Elemente von B haben so die Werte b i j = ! 1 (Vorzeichen) für die Zweigströme, deren
Zweigrelationen eingeführt werden und sind sonst Null.
2) Die Zeilen ( C . U + D . J ) = E bilden die Zweigströme in Abhängigkeit der Knotenspannungen
ab:
bei Zweigen ohne Spannungsquelle,
{ yij (Ui - Uj ) - Iij = 0
{ yi (Ui - Uj ) - IE = yi E bzw. Ui - Uj - R i IE = E bei Strömen durch Spannungsquellen E.
Der fiktive Innnenwiderstand R i der Spannungsquelle E wird dabei Null gesetzt ( yi = R1 d ∞ ).
i
a) Die Elemente der Matrix C erhält man formal durch partielles Differenzieren der einzelnen
Zweigrelationen nach den Knotenspannungen und sind somit Admittanzen ( ! y ij ).
b) Die Elemente der Matrix D erhält man, indem diese zusätzlichen Zweigrelationen partiell nach
den einzelnen Zweigströmen I i j bzw. IE differenziert werden. Für die Hauptdiagonalelemente von
D gilt somit dii = -1, während alle anderen Elemente Null werden. Für einen Strom IE durch eine
ideale Spannungsquelle E verschwindet auch das Hauptdiagonalelement (Grenzwert).
Für das praktische Vorgehen beim Bestimmen des MNA-Gleichungssystems sind ggf. noch
folgende Hinweise nützlich:
{ Enthält ein Netzwerk nur lineare Leitwerte und unabhängige Stromquellen, so sollte nach der
einfachen Knotenspannungsmethode (Y . U = I ) gearbeitet werden. Für Widerstände
(Leitwerte), reale Spannungsquellen und Kapazitäten werden Zweigströme nur dann als
Variable in das Gleichungssystem aufgenommen, wenn
a) andere nichtlineare Elemente von diesem Strom gesteuert werden und/oder
b) dieser Zweigstrom als Ausgangsgröße der Analyse/Simulation gefordert wird.
{ Sind stromgesteuerte Variable und/oder Spannungsquellen im Netzwerk enthalten, so werden
bei der MNA-Methode die Zweigströme durch diese Elemente als neue Variable und/oder die
Zweigrelationen als zusätzliche Gleichungen eingeführt. Diese Zweigströme sind damit als
abhängige Variable direkt berechenbar !
{ Für die Elemente R, C, I können sowohl die Knotenspannungsgleichungen als auch die
Zweigspannungsgleichungen erstellt werden. Für Spannungsquellen E und Induktivitäten L
dagegen sind nur die Zweigstromgleichungen sinnvoll. Die Ströme I auf der rechten
Gleichungsseite werden aus den bekannten Knotenspannungen zum Zeitpunkt n-1 bestimmt.
{ Für Spannungsquellen (unabhängig bzw. gesteuert), Induktivitäten und nicht spannungsgesteuerte Netzwerkelemente wird bei der MNA-Methode immer ein Zweigstrom als neue
Variable eingeführt (Spalte). Die Zweigrelation dieses Elementes wird als zusätzliche
Gleichung aufgenommen (Zeile).
2. Analyse elektronischer Schaltungen
33
Beispiele zur MNA-Methode
Nachfolgend werden einige einfache Beispiele zum Aufstellen der Matrixgleichungen nach der
MNA-Methode angegeben.
Beispiel 1:
Bild 2.16 zeigt ein einfaches Netzwerk mit idealer Spannungsquelle E.
1
I 12
2
I1
I2
R1
E
R2
0
I 1- I 12 = 0
y 1(U1- U0 ) + I1 = 0
I 12 - I 2 = 0
y 2(U 2- U 0 ) + I 2 = 0
I1 - I 2 = 0
U 1 - U 2 - R i I12 = E mit R i : = 0
Bild 2.16: Netzwerk mit idealer Spannungsquelle E (zu Beispiel 1)
Das unbestimmte MNA-Gleichungssystem mit allen Knotenspannungen und Zweigströmen nach
o.g. Bildungsregel erhält man zu:
y1
0
−y1
y1
0
1
0
−y1
−y2
y2
−y2 y1 + y2
0
−y1
y2
−y2
−1
0
1
0
−1
−1
0
0
0
−1
1
0
−1
0
−1
1
0
0
0
0
.
U1
U2
U0
I1
I2
I 12
=
0
0
0
0
0
E
.
Streicht man die entsprechende Zeile und Spalte der Variablen U0 (Bezugsknoten), so ergibt sich
die bestimmte Matrixgleichung. Nach aufwendiger Rechnung (Entwicklung von zwei 5-reihigen
.
Determinanten) erhält man z. B. für den Strom I12 = IE daraus erwartungsgemäß I 12 = R E
+R
1
2
Eine modifizierte bestimmte Matrixgleichung erhält man durch zusätzliches Streichen von Spalte
und Zeile für einzelne Zweigströme ( hier I1 und I2 ) zu
y1 0 −1
0 y2 1
1 −1 0
.
U1
U2
I 12
=
0
0
E
.
{ Mit stark verringertem Aufwand ermittelt man auch hier die Lösung I 12 = R E
.
1 + R2
34
2. Analyse elektronischer Schaltungen
Beispiel 2:
Ein Netzwerk mit zwei Spannungsquellen E1 und E2 zeigt Bild 2.17 (belasteter Spannungsteiler,
vgl. auch Abschnitt 2.1). Das vollständige Gleichungssystem für Um = 0 mit allen Zweigströmen
wird bezogen auf die allgemeine Blockstruktur des MNA-Gleichungssystems wie folgt ermittelt.
I
2
I e1
I
3
Ue1
1
R1
2
R2
Ue2
I e2
I 1 + I2 - I L = 0
I 1 - Ie1
I 2 - Ie2
1
RL
I
=0
=0
L
m
Bild 2.17: Netzwerk mit zwei Spannungsquellen (zu Beispiel 2)
1) Teilmatrix Y
Die Admittanzmatrix Y ergibt sich genau wie beim einfachen Knotenspannungsverfahren.
2) Teilmatrix B
Der Ausdruck B . J = 0 repräsentiert die Kirchhoffschen Knotensätze in der Form Ik = 0. Die
Elemente der Matrix B erhält man so formal aus den partiellen Ableitungen der entsprechenden
Knotengleichungen nach den Stromvariablen (vgl. Zeilen 1- 3, Spalten J1 - Je2 ).
3) Teilmatrizen C und D
Die Zeilen J1 , ..., JE stellen die Zweigrelationen in der Form yi j (Ui - Uj ) - J i j = 0 bzw. für die
Zweigströme Je i durch die Spannungsquellen Ei in der Form (Ui - Uj ) - Rij Jei = Ei mit Ri j = 0 dar.
Die Elemente cij der Matrix C ergeben sich formal durch partielle Ableitung der entsprechenden
Zweigrelationen nach den Knotenspannungen. Für die Elemente dij der Matrix D erhält man in der
Hauptdiagonalen -1 (außer in Zeilen Je1 , Je2 ) und sonst Null.
(y1 + y2 + yL ) −y 1 −y 2 +1 +1 −1
y 1 0 −1 0 0
−y 1
0 y 2 0 −1 0
−y 2
y 1 0 −1 0 0
−y 1
−y 2
0 y 2 0 −1 0
0
0 0 0 −1
+yL
0
1
0 0 0 0
0
0
1 0 0 0
0
+1
0
0
0
0
0
0
0
0
+1
0
0
0
0
0
.
U1
U2
U3
I1
I2
IL
I e1
I e2
=
0
0
0
0
0
0
E1
E2
Verzichtet man auf die explizite Darstellung der Zweigströme I1 , I2 und IL , so erhält man einfacher
(y1 + y2 + yL ) −y 1 −y 2 0 0
y 1 0 +1 0
−y 1
−y 2
0 y 2 0 +1
0
1
0 0 0
0
0
1 0 0
.
U1
U2
U3
I e1
I e2
=
0
0
0
E1
E2
.
2. Analyse elektronischer Schaltungen
35
Beispiel 3:
Bild 2.18 zeigt ein Netzwerk mit Spannungsquelle E und dem nichtlinearen Element Y3 = Y3 (J3 ).
Auch hier erhält man das vollständige unbestimmte Gleichungssystem für das MNA-Verfahren mit
allen Knotenspannungen und allen Zweigströmen nach o.g. Weg /12/.
Y
1
1 J1
J
E
E
J
2
J
+
-
2
Y
2
3
J
4
B
C
D
U
I
=
*
Y (J )
3 3
Y
4
Y
3
J
E
4
Bild 2.18: Netzwerk mit Spannungsquelle und Nichtlinearität (zu Beispiel 3)
Bezogen auf die Blockstruktur des MNA-Gleichungssystems gilt nun:
1) Teilmatrix Y
Die Admittanzmatrix Y ergibt sich genau wie beim einfachen Knotenspannungsverfahren. Einzige
Besonderheit ist die Behandlung der Nichtlinearität Y3 .
2) Teilmatrix B
Der Ausdruck B . J = 0 repräsentiert wieder die Kirchhoff'schen Knotensätze in der Form Ik = 0.
Die Elemente der Matrix B erhält man aus den partiellen Ableitungen dieser Knotengleichungen
nach den Stromvariablen (vgl. Zeilen 1- 4, Spalten J1 - JE ).
3) Teilmatrizen C und D
Die Zeilen J1 , ..., JE stellen wieder die Zweigrelationen in der Form yi j (Ui - Uj ) - Ji j = 0 bzw. für
den Zweigstrom JE durch die Spannungsquelle E in der Form (U1 - U4 ) - Ri JE = E mit Ri = 0 dar.
Die Elemente cij der Matrix C erhält man aus den Zweigrelationen durch partielle Ableitung nach
den Knotenspannungen.
Die Elemente der Matrix D sind in der Hauptdiagonalen -1 (außer in Zeile JE ) und sonst Null. Bei
nichtlinearen Elementen (hier J3 ) müssen die Gleichungen gemäß Linearisierungsvorschrift und
zeitlicher Iteration beachtet werden (vgl. Abschnitt 2.3).
1
2
3
4
J1
J2
J3
J4
JE
1
Y1
-Y1
0
0
1
0
0
0
-1
U1
0
2
-Y1
Y1+Y2+Y4
-Y2
-Y4
-1
1
0
1
0
U2
0
3
0
-Y2
Y2
0
0
-1
1
0
0
U3
0
4
0
-Y4
0
Y4
0
0
-1
-1
1
U4
0
------ ------ ------------- ----- ------ ----
----
-------- ---- ------ .
-----
=
-------
J1
Y1
-Y1
0
0
-1
0
0
0
0
J1
0
J2
0
Y2
-Y2
0
0
-1
0
0
0
J2
0
J3
0
0
Y3i
-Y3i
0
0
-1
0
0
J3
-Ieq(i)
J4
0
Y4
0
-Y4
0
0
0
-1
0
J4
0
JE
1
0
0
-1
0
0
0
0
0
JE
E
36
2. Analyse elektronischer Schaltungen
Wird in diesem Beispiel auf die abhängigen Ströme J1 , J2 und J4 im Gleichungssystem verzichtet
(sie lassen sich als Sekundärgrößen leicht nachträglich ermitteln), so entsteht das folgende
reduzierte Gleichungssystem (mit vertauschter Zeilen- und Spaltenfolge):
1
2
3
J3
JE
4
1
Y1
-Y1
0
0
-1
0
U1
0
2
-Y1
Y1+Y2+Y4
-Y2
0
0
-Y4
U2
0
3
0
-Y2
Y2
1
0
0
U3
0
------
------
------ ------ ------------- ----- -------i
i
.
-----
=
-------
J3
0
0
Y3
-1
0
-Y3
J3
-Ieq(i)
JE
1
0
0
0
0
-1
JE
E
4
0
-Y4
0
-1
1
Y4
U4
0
Für das nichtlineare Element wurde dabei die Beschreibung nach Bild 2.14 (Diode) gewählt:
(i )
(i )
I 3 = I D,n = y 3(i) (U 3 − U 4 ) + I eq
.
{ Für die weitere Rechnung (Analyse bzw. Simulation) werden in beiden Gleichungssystemen
Zeile und Spalte für die Knotenvariable U4 gestrichen. Man erhält damit die bestimmte
Matrixgleichung, U4 ist Bezugsgröße für alle anderen Knotenspannungen.
Zusammenfassung
Allgemein erhält man nach der MNA-Methode für ein Netzwerk mit k Knoten und z Zweigen ein
Gleichungssystem der Dimension [(k-1) + z ] x [(k-1) + z ] für die bestimmte Matrixgleichung.
{ Die Größe des Gleichungssystems und damit der Rechenaufwand bei der Analyse bzw.
Simulation können z. T. drastisch reduziert werden, wenn man nur m < z Zweigströme als
abhängige Variable selektiert.
{ Ein Nachteil für symbolische Analyse und/oder Handberechnungen ist neben der Größe des
Gleichungssystems auch der Sachverhalt, daß ein symbolischer Parameter an verschiedenen
Stellen der Matrixgleichung und ggf. auch noch mit unterschiedlichem Vorzeichen auftreten
kann.
{ Im allgemeinen ist für praktikable Schaltungsgrößen das beschriebene MNA-Verfahren nur
mit Hilfe entsprechender Simulationssysteme auf PCs und Workstations anwendbar.
3. Operationsverstärker
3
37
Operationsverstärker
Die Schaltungstechnik mit Operationsverstärkern nutzt unmittelbar das Gegenkopplungsprinzip,
wonach die Eigenschaften der Gesamtschaltung wesentlich durch die Eigenschaften des Gegenkopplungsnetzwerkes bestimmt werden, wenn der (Vorwärts-)Verstärker einen hinreichend großen
Verstärkungsfaktor besitzt.
{ In der analogen elektronischen Schaltungstechnik werden grundlegende Eigenschaften der
Funktionseinheiten durch Anwendung des Gegenkopplungsprinzips erreicht bzw. beeinflußt,
z. B. Linearität, Dynamik, Parameterkonstanz, Störunabhängigkeit und Zuverlässigkeit.
Operationsverstärker (OPV) finden heute als monolithische Bauelemente eine breite Anwendung in
der analogen Schaltungstechnik sowie an der Nahtstelle zwischen analogen und digitalen Systemen
(Komparator, Digital-Analog- und Analog-Digital-Umsetzer). Ein wesentlicher Grund dafür ist
neben den guten funktionellen Eigenschaften ihre einfache Handhabung:
{ Meist sind neben dem OPV-Schaltkreis nur wenige zusätzliche Bauelemente nötig, um eine
funktionstüchtige anwendungsspezifische Schaltung zu realisieren (Rückkopplungs- bzw.
Funktionsnetzwerk, Offset- und Frequenzkompensation).
{ Insbesondere ist in den meisten Anwendungsfällen die Arbeitspunktproblematik durch das
Anschließen der Betriebsspannungen und die funktionsgerechte Beschaltung gelöst, was den
Entwurf von analogen Schaltungen maßgeblich vereinfacht.
Bild 3.1 zeigt das Schaltsymbol für einen (idealisierten) Differenz-Operationsverstärker.
{ Der OPV verstärkt die Eingangs-Differenzspannung UD = Us+ - Us- innerhalb seines linearen
Aussteuerbereiches (vgl. Kennlinie in Bild 3.1) mit einem sehr großen Wert Fo = 10 3 ... 10 6 .
Ua = Fo . UD = Fo ( Us+ - Us- ).
Wegen der technisch begrenzten Ausgangsspannung Ua ≤ Uamax (z. B. ± 10 V) kann der Verstärker
mit Differenzeingangsspannungen UD im Bereich von µV... mV voll ausgesteuert werden.
Ua
+U CC
U
D
Us -
Us+
+ U amax
Fo
+
- UEE
Ua
-Uamax
Fo
Uamax
Fo
UD
- Uamax
Bild 3.1: Schaltsymbol und Übertragungskennlinie eines Operationsverstärkers
38
3. Operationsverstärker
3.1
Eigenschaften und Kenngrößen von Operationsverstärkern
3.1.1
Zum Schaltsymbol
Die Dreieckform des Schaltsymbols für OPV in Bild 3.1 kennzeichnet die Signalflußrichtung von
den Eingängen zum Ausgang. Die wesentlichen funktionellen Anschlüsse sind der Ausgang (a, o)
sowie der invertierende (s-, I ) und nichtinvertierende (s+, N) Eingang.
Zur Einstellung des Arbeitspunktes und Realisierung der aktiven OPV-Schaltung genügt i.a. das
Anlegen der meist bipolaren Betriebsspannung (typisch ± 15 V) an die vorgesehenen Anschlüsse.
{ Gemeinsamer Bezugspunkt für die Spannungen Us- , Us+ und Ua an den funktionellen
Anschlüssen des OPV ist der Massepunkt GND, der als Anschluß tatsächlich oder virtuell als
Null der Betriebsspannung vorhanden ist (Bilder 3.2 a, b).
{ Die Betriebsspannungsanschlüsse und der Masseanschluß am Schaltsymbol des OPV werden
aus Übersichtsgründen in entsprechenden Funktionsschaltungen meist nicht angegeben.
Reale OPV können darüber hinaus mit Anschlüssen für die Offsetkorrektur, Frequenzgangkorrektur
und/oder zur Steuerung des Arbeitspunktes (Betriebsstrom, Steilheit der Übertragungskennlinie,
Tristate des Ausganges - z. B. µA 776) versehen sein.
-
s-
+
+U
U
-
a
s+
GND
U
a) echter Masseanschluß
-
CC
GND
+
+
EE
-
U EE
b) virtueller Masseanschluß
I e-
a
Ia
ss+
Us+
U
-U
-
UD
s+
+
I e+
+
+U
a
+
-U
Us-
ss+
+
s-
CC
-
Ua
Offsetkorrektur
-
a
+
I AP
Frequenzgangkorrektur
GND
c) Vorzeichenvereinbarung für
Spannungen und Ströme
d) Zusätzliche Anschlüsse realer OPV
Bild 3.2: Zum Schaltsymbol von Operationsverstärkern (OPV)
3. Operationsverstärker
3.1.2
39
Ersatzschaltung und Kennwerte realer OPV
Operationsverstärker sind Gleichspannungsverstärker mit einer sehr hohen (Leerlauf-)Verstärkung
Fo = 103 ... 106 und einem Ausgangsruhepotential Null (Uein = 0 → Ua = 0).
{ Die hohe Leerlauf-Verstärkung erfordert meist einen mehrstufigen Aufbau der elektronischen
Schaltung, wobei wegen der Forderung nach einem Ausgangsruhepotential Null typisch
komplementäre Schaltstufen zur Pegelverschiebung zum Einsatz kommen (Bild 3.3).
{ Charakteristisch ist außerdem die Anwendung von Differenzverstärkern als Eingangsstufe
und Komplementär-Emitterfolgern als stromtreibende Ausgangsstufe. Die Bandbreite der
Leerlaufverstärkung moderner OPV erreicht heute bis zu 200 MHz. Die elektrischen
Kennwerte eines Operationsverstärkers an den dem Anwender zugänglichen Pins sind durch
die bekannten Grundschaltungen der Ein- und Ausgangsstufen bestimmt.
+ U CC
+ U CC
I o2
e1
e
1
T1
T2
T4
T3
e2
e2
+
Fo
-
a
- U EE
T5
a
U a = 0 für Ue1- U e2 = 0
I o1
- U EE
Bild 3.3: Einfacher Operationsverstärker mit Differenzverstärkerkaskade und Emitterfolger
als Ausgangsstufe (Prinzipschaltung)
Für eine praktikable und einheitliche Beschreibung der relativ aufwendigen Innenschaltung realer
OPV werden Kenngrößen definiert, die das Klemmenverhalten der Schaltung charakterisieren. Die
netzwerkgerechte Darstellung dieser Kenngrößen führt zur Ersatzschaltung. Ein für die meisten
Einsatzfälle geeignetes Ersatzschaltbild für OPV mit Differenzeingang zeigt Bild 3.4. Einen
Überblick über die Kenngrößen von OPV und ihre typischen Werte gibt Tafel 3.1.
{ Die wesentliche funktionelle Eigenschaft von OPV, ihre hohe Leerlaufverstärkung F0, wird
durch die spannungsgesteuerte Spannungsquelle Ua in der Ersatzschaltung dargestellt
U a = F o U D = F o (U s+ − U s− ) = F o (U s+ + U off − U s− ) = F o (U s+ − U s− ) + F o U off .
∏
∏
{ Nur im linearen Aussteuerbereich des OPV (Bild 3.1) ist diese gesteuerte Spannungsquelle Ua
proportional zur Differenzeingangsspannung UD und die Differenzverstärkung F0 = VD von
der Aussteuerung unabhängig.
{ Überschreitet die Eingangsaussteuerung mit U D > UFa max diesen linearen Bereich, so wird
o
der Verstärker übersteuert und das lineare Verhalten geht verloren (vgl. Komparator).
40
3. Operationsverstärker
re rd
Us+
U's-
Ie-
Us-
ra
Uoff
Ua
Ie+
U's+
r e+
Uo
U a = Fo (U's+ - U's- )
Bild 3.4: Ersatzschaltung für Operationsverstärker
Kennwert
Definition, Erläuterung
Ausgangsspannung
(gesteuerte Quelle)
Ua =
Vo (
U s+ − U s− + U off )
1 + p To
typischer Wert
ideal
V o = F o ( p d 0)
= F o (U d + U off )
Ausgangssättigungsspannungen
U +a max , U a−max
|UCC | - 2 V
Differenzverstärkung
Vo = Ua /Ud
> 103...106
∞
Gleichtaktverstärkung
VGl = Ua /UGl (für Ud = 0)
(10...20) dB
0
Gleichtaktunterdrückung
G = Vo /VGl (CMRR)
> (60 ... 80) dB
∞
Eingangsoffsetspannung
U off = !U d für U a = 0
(0,5 ... 5) mV
0
Eingangsruheströme
50 pA...1 µA
0
Eingangsoffsetstrom
Ie+ , IeI + I e−
I e = e+
2
Ioff = Ie+ - Ie-
5 pA...100 nA
0
Differenzeingangswiderstand
rd
> 50 k... 1M
∞
Gleichtakteingangswiderstand
re+ , re-
> 10 M
∞
Ausgangswiderstand
ra
(75...150) 0
Ausgangsstrom
Iamax
(5 ... 20) mA
3-dB-Grenzfrequenz
|Vo | um 3 dB abgefallen
f1 -Frequenz (V.B-Produkt)
> 1 MHz
Slew Rate (max. Spannungsanstieg
bei Großsignalaussteuerung)
|Vo | auf 0 dB abgefallen
dU
S R = ( a ) max
dt
Betriebsspannung
typ. symmetrisch UCC = - UEE
! 15 V
mittlerer Eingangsruhestrom
0
0,2 ...
> 200 V/µs
Tafel 3.1: Kenngrößen von Operationsverstärkern (vgl. Ersatzschaltung in Bild 3.4)
3. Operationsverstärker
3.1.3
41
Idealer Operationsverstärker
Zum leichteren Verständnis der Funktion und zur vereinfachten Analyse von OPV-Schaltungen ist
es zweckmäßig, zunächst von einem idealen OPV auszugehen. Schaltungen mit realen OPV
weichen im interessierenden Signalbereich oft nur geringfügig von dem idealisierten Verhalten ab.
{ Bei gegengekoppelten Schaltungen mit einem idealen Operationsverstärker verschwinden die
Differenzeingangsspannung und die Eingangsströme des OPV bei beliebiger Ansteuerung am
Eingang und beliebiger Aussteuerung bzw. Last am Ausgang:
UD = 0, Ie+ = Ie- = 0 für beliebige Ua , Ia , Ue (Ugl ).
Die Forderung nach verschwindender Differenzeingangsspannung UD d 0 ist gleichbedeutend mit
der Forderung nach unendlicher frequenzunabhängiger Verstärkung Fo. Wegen U a = F o U D bzw.
U
U D = a und der technisch immer begrenzten Ausgangsspannung Ua [ Uamax (z. B. ! 10 V) folgt
F
o
lim U D d 0 .
Fo d ∞
{ Die Qualität eines realen OPV und damit realisierter Schaltungen wird nach diesem Konzept
wesentlich von der Nullabweichung am Eingang des OPV bestimmt.
Die im Abschnitt 3.1.2 angegebenen Kennwerte realer OPV können als Fehlerquellen bzgl. des
idealen Verhaltens aufgefaßt werden. Bei der Schaltungsanalyse ist es zweckmäßig, den Einfluß
dieser realen Kennwerte, wenn überhaupt notwendig, erst dann zu untersuchen, nachdem man das
Verhalten der OPV-Schaltung unter idealen Bedingungen analysiert hat. Dabei empfiehlt sich eine
getrennte Analyse des Einflusses der einzelnen Kenngrößen (vgl. Abschnitt 3.3).
{ In diesem Sinne spricht man auch von einem idealisierten OPV, bei dem bis auf einen oder
einzelne Parameter alle anderen Kennwerte idealisierte Werte annehmen (Tafel 3.2).
Symbol
typischer Wertebereich
Differenzverstärkung
VD
104 ... 106
d∞
Gleichtaktunterdrückung
G
106 ... 108
d∞
Gleichtakteingangswiderstand
re+ , re-
(1 ... 10) MΩ
d∞
Differenzeingangswiderstand
rD
(0,01 ... 1) MΩ
d∞
Eingangsruhestrom
Ie+ , Ie-
(0,05 ... 10) µA
0
Eingangsoffsetstrom
Ioff
(0,01 ... 100) nA
0
Eingangsoffsetspannung
Uoff
(0,1 ... 20) mV
0
Drift der Offsetspannung
UDr
(1 ... 10) µV/°K
0
Ausgangsstrom
Iamax
(5 ... 20) mA
beliebig
Ausgangsspannung
Uamax
(5 ... 20) V
beliebig
f1 (|Fo | =1)
(1 ... > 100) MHz
Kennwert
3-dB-Frequenz
Tafel 3.2: Idealisierte Kennwerte eines OPVs
idealer Wert
d∞
42
3. Operationsverstärker
Für einen realen OPV kann nun ein modifiziertes Ersatzschaltbild angegeben werden (Bild 3.5). Bis
auf die gesteuerte Spannungsquelle Ua und den Ausgangswiderstand ra (vgl. dazu Abschnitt 3.3.2)
können alle Netzwerkelemente der Ersatzschaltung aus Bild 3.4 als externe Elemente des inneren
idealisierten OPV betrachtet und behandelt werden.
idealisierter OPV
U s-
re -
I erd
U s+
U's-
-
ra
+
Ua
Uoff
I e+
U's+
re+
Ia
Uo
U a = Fo (U's+ - U's- )
Bild 3.5: Modifiziertes Ersatzschaltbild für Operationsverstärker
Die wesentliche funktionelle Eigenschaft von OPV, die hohe Leerlaufverstärkung Fo , wird durch
∏
∏
die spannungsgesteuerte Spannungsquelle Ua beschrieben U a = F o U D = F o (U s+ − U s− ) .
{ Bei Anwendung der Knotenspannungsmethode zur Analyse wird diese Spannungsquelle
typisch in eine äquivalente Stromquelle I a = ya U a = y a F o (U s+ − U s− ) = S . U D umgeformt.
Für die gesteuerte Spannungsquelle Ua des OPV-Modells werden verschiedene Idealisierungsstufen
eingeführt (ya d ∞, F o d ∞, S = ya F o d ∞ ). Diese idealisierten Eigenschaften können direkt in der
Admittanzmatrixgleichung berücksichtigt werden. Für die verschiedenen Idealisierungsstufen sind
in Bild 3.6 die unbestimmten Matrixgleichungen für die Knoten s-, s+, o und m angegeben.
{ Die bestimmte Admittanzmatrixgleichung erhält man aus der unbestimmten Matrixgleichung,
indem die m-te Knotengleichung gestrichen und durch die Zeile 0 .. 0 1 (U m ) = (0) ersetzt
wird. Zusätzlich kann die m-te Spalte der Admittanzmatrix gestrichen werden.
{ In allen Fällen wird dabei lineares Verhalten des OPV am Ausgang vorausgesetzt, d.h. eine
Spannungsübersteuerung und/oder Stromüberlastung muß vermieden werden:
U a [ U a max , I a [ I a max bzw. R L m R L min .
3. Operationsverstärker
s-
s+
-
Ia r a
I a= yaUa
s-
−S +S ya −y a
+S −S −ya y a
U s+
U s−
UO
Um
=
−F o +F o 1 −1
+F o −F o −1 1
U s+
U s−
UO
Um
=
−ya +ya 0
+ya −ya 0
0
0
U s+
U s−
UO
Um
=
0
0
U s+
U s−
UO
Um
=
o
U a= F o ( U s+ - Us - )
+
43
o
s+
U = Fo (Us+ - Us- )
a
y
∞
a
+
∞
Fo
s-
0
0
0
0
-
U =0
D
s+
∞
o
+
S = ya Fo
∞
−1 +1 0
+1 −1 0
0
0
Bild 3.6: Idealisierungsstufen für eine spannungsgesteuerte Strom-/Spannungsquelle
und ihre unbestimmten Admittanzmatrixgleichungen
{ Der letzte Fall in Bild 3.6 entspricht der Beschreibung eines idealen OPV mit unendlicher
Verstärkung bzw. UD = 0 und vernachlässigbarem Ausgangswiderstand ra = 0.
3.2
Operationsverstärker-Grundschaltungen
Das Rückkopplungsnetzwerk wird vorzugsweise mit passiven Bauelementen (R, C) realisiert und
muß deshalb zwischen Ausgang und invertierenden Eingang geschaltet werden (Gegenkopplung).
Das Eingangssignal kann wahlweise dem invertierenden und/oder dem nichtinvertierenden OPVEingang zugeführt werden. Man unterscheidet die drei OPV-Grundschaltungen invertierender und
nichtinvertierender Verstärker sowie Differenzverstärker.
Nachfolgend werden die funktionellen Eigenschaften dieser Grundschaltungen unter der Annahme
idealisierter OPV analysiert. Dabei sind für einen schnellen Überblick folgende Aussagen nützlich:
{ Bei gegengekoppelten Schaltungen mit idealem OPV regelt sich die Differenzspannung UD
zwischen den beiden Eingangsklemmen auf Null aus (wenn der OPV nicht übersteuert wird).
Es gilt stets UD = Us+ - Us- = 0. In beiden Eingängen des OPV fließt kein Strom (Ie+ = Ie- = 0).
44
3. Operationsverstärker
3.2.1
Invertierender und nichtinvertierender Verstärker mit OPV
Mit den o.g. Ausführungen in Abschnitt 2 und 3.1 können nun die funktionellen Eigenschaften der
invertierenden und nichtinvertierenden Verstärkerschaltung (Bild 3.7) einfach ermittelt werden.
I 1 R1
Ue
I 1 R1
R2
1
I2
2 Fo
+
Uo
2
Ue
invertierend
R2
1
I2
Fo
+
Uo
nichtinvertierend
U 2 − U 1 = 0 für F o d ∞
I 1 + I 2 = 0 für I e− = 0
I1 =
Ue − U1
R1
I2 =
Uo − U1
R2
I1 = −
R2
U
R1 e
U1 = U2 = 0
U1
R1
R2
)U
R1 e
U1 = U2 = Ue .
Uo = −
U o = (1 +
Bild 3.7: Invertierende und nichtinvertierende Verstärkerschaltung mit OPV
Äquivalent erhält man die Lösungen über die bestimmten Admittanzmatrixgleichungen. Unter
Anwendung des Modells für eine spannungsgesteuerte Stromquelle Ia = ya Ua mit Ua = Fo (Us+ - Us- )
und der Idealisierung S = (ya F o ) d ∞ (vgl. auch Bild 3.6) gilt:
y1 + y2
1
− y2
0
U1
Uo
=
y1 U e
0
bzw.
y1 + y 2
1
− y2
0
U1
Uo
=
0
Ue
.
Daraus erhält man die Knotenspannungen U1 und Uo für beide Schaltungen zu:
y1
R
U o = − y2 U e = − 2 U e
R1
U1 = 0
bzw.
Uo = +
y1 + y2
R2
y2 U e = + 1 + R 1 U e
U1 = Ue
{ In beiden Schaltungen wird somit die Differenzspannung UD = Us+ - Us- = 0.
{ Der invertierende Eingang des OPV wird in der invertierenden Grundschaltung durch die
Gegenkopplung statisch auf den Wert Null ausgeregelt ("virtuelles Massepotential").
{ Beim nichtinvertierenden Verstärker wird die Spannung Us- auf Us- = Us+ ausgeregelt. Beide
OPV-Eingänge haben das gleiche Potential (hier Us+ = Ue). Von dieser Eigenschaft wird u.a.
bei den Schaltungen für Strom- und Spannungsquellen sowie in nichtlinearen Schaltungen
Gebrauch gemacht.
3. Operationsverstärker
45
Der Eingangswiderstand der beiden Schaltungen bzgl. ihrer Signalquelle Ue kann ebenfalls über die
Admittanzmatrixgleichungen berechnet werden (Bild 3.8).
I
M 3
R
1
2
Ri
R
1
R
2
Fo
+
U
1
R
1
Fo
+
IM 2
O
2
U
O
Ri
y1 + y2 −y2 −y1
1
0
0
−y 1
0 y1 + y i
U1
Uo
U3
=
y1 + y 2 −y 2 0
1
0 −1
0
0 yi
0
0
IM
U1
Uo
U2
=
0
0
IM
Bild 3.8: Zur Berechnung des Eingangswiderstandes von OPV-Grundschaltungen
Z ein =
y2
U3
= R1 || R i
=
IM
(
y 2 y 1 + yi )
bzw.
Z ein =
y2
U2
= y2 yi = R i
IM
Bei idealer Signalstromquelle (Ri d ∞) folgt somit
Z &ein = R 1 ; Z ein = 0
∏
∏
Z ein d ∞ .
Der wesentliche Unterschied zwischen den beiden Grundschaltungen liegt neben der gewünschten
U
invertierenden bzw. nichtinvertierenden Übertragung im Wertebereich des Übertragungsfaktors U o
e
und im Eingangswiderstand für die Signalquelle Ue .
Wertebereich des Verstärkungsfaktors
−V inv =
Uo R2
=
m0
Ue R1
V ninv =
Uo
R
=1+ 2 m1
Ue
R1
Der Spezialfall R 1 d ∞ (R 2 = 0) ergibt den
Spannungsfolger mit V = 1.
R2
Ue
Eingangswiderstand
Die Gegenkopplung transformiert den
Eingangswiderstand der invertierenden
∏
Schaltung auf sehr kleine Werte Z ein d 0 .
Die Signalquelle muß den Strom I a = − I e
kompensieren.
+
Uo
Die Signalquelle wird nur durch den sehr
hochohmigen OPV-Eingang belastet.
Ein Kompensationsstrom wie beim
invertierenden Verstärker tritt nicht auf.
46
3. Operationsverstärker
3.2.2
Differenzverstärker mit OPV
Wird gleichzeitig an beiden Eingängen eines OPV eine Signaleinspeisung vorgenommen, so
entsteht eine Subtrahierschaltung bzw. eine Differenzverstärkerschaltung (Bild 3.9).
{ Bei geeigneter Bemessung der Widerstände wird nur die Differenz der Eingangssignale mit
dem Faktor V verstärkt.
U1
R1
R2
UD
U2
Uo = −
-
Uo
+
R3
R2
R4
R
U +
1 + 2 U2
R1 1 R3 + R4
R1
U o = V ( U 2 − U 1 ) für V =
R2
R
= 4
R1
R3
R
4
Bild 3.9: Differenzverstärker mit OPV
Nachteilig an der Schaltung ist, daß bei Verstärkungsänderungen an jedem Eingang mindestens ein
Widerstand geändert werden muß (Gleichlaufproblem). Zu beachten sind auch die verschiedenen
Eingangswiderstände: Signalquelle U1 wird mit R1 , Signalquelle U2 mit (R3 + R4 ) belastet. Eine
Differenzquelle Ud = U2 - U1 dagegen sieht wegen UD = 0 den Eingangswiderstand Rd = R1 + R3 .
Differenzverstärker mit zwei hochohmigen Elektrometer-Eingängen zeigt Bild 3.10. Sie werden
auch als Instrumentationsverstärker bezeichnet (zur Gleichtaktverstärkung bei Differenzverstärkern
vgl. Abschnitt 3.3.4).
U
1
U*1
+
-
R
R2
U
U2
U*1
R
R2
R
+ 2
R1
R3
U2 − U1 )
.(
R2
U
2
+
Uo = 1 + 2
R
-
R1
2
Uo
R
R2
R
3
+
Uo = 1 + 2
+
-
2
R1
-
1
Uo
+
R
R
U*
2
R2
R1
U2 − U1 )
.(
Bild 3.10: Unsymmetrische und symmetrische Differenzverstärkerschaltungen mit OPV
Vorteilhaft an beiden Schaltungen ist, daß der Verstärkungsfaktor mit nur einem Widerstand R1
programmiert werden kann. Es werden sowohl monolithische Schaltkreise als auch hybride Module
mit diesem Schaltungskonzept als sogenannte programmable gain amplifier (PGA) angeboten. Hier
ist nur noch der Präzisionswiderstand R1 als externes Bauelement vom Anwender einzusetzen.
3. Operationsverstärker
3.2.3
47
Invertierender und nichtinvertierender Summierer
Die Grundschaltungen nach Bild 3.7 lassen sich in einfacher Weise für die Addition mehrerer
Ströme und/oder Spannungen mit verschiedenen Gewichtsfaktoren erweitern (Bild 3.11).
U1
U2
I1
I2
R1
R2
R0
+
R0
R1
Uo
U1
U2
-
R*
1
+
Uo
R*
2
R*0
Bild 3.11: Invertierender und nichtinvertierender Summierer
Invertierender Summierer
Der invertierende Eingang des OPV liegt infolge der Gegenkopplung über R0 beim invertierenden
Summierer nahezu auf Massepotential (virtuelle Masse). Der aus den einzelnen Teilströmen
gebildete Summenstrom I muß durch den Ausgangsstrom IO kompensiert werden (Knotensatz).
Dieser Strom fließt durch den Rückkopplungswiderstand R0 und erzeugt so die Ausgangsspannung
−U o = R 0 I (Strom-/Spannungswandler).
Jede Spannungssignalquelle Ui wird wegen Us- = 0 mit dem Eingangswiderstand R i ein = R i belastet.
Für die Ausgangsspannung UO gilt
U
U
Uo = − ( R 1 + R 2 + I1 + I2 ) R0 .
1
2
Nichtinvertierender Summierer
Am hochohmigen nichtinvertierenden Eingang eines gegengekoppelten OPV können Spannungen
gewichtet addiert werden. Wegen der schlechteren Entkopplung der Eingangsgrößen im Vergleich
zur invertierenden Schaltung lassen sich die Gewichtsfaktoren für die einzelnen Spannungen nicht
unabhängig voneinander realisieren. Die Dämpfung infolge der Spannungsteilung im Eingangskreis
R
läßt sich ggf. mit einer Verstärkung (1 + R o ) kompensieren.
1
Für die Ausgangsspannung UO der Schaltung gilt jetzt
R&
R&
U o = ( o& U 1 + o& U 2 )
R1
R2
1+
1+
Ro
R1
R &o R &o
+
R &1 R &2
.
Zu beachten sind die unterschiedlichen Eingangswiderstände der Signalquellen (Spannungsteiler).
48
3. Operationsverstärker
3.3
Einfluß realer OPV-Kennwerte auf die Übertragungseigenschaften gegengekoppelter
Schaltungen
Bei Annahme idealer OPV ist das Übertragungsverhalten der Gesamtschaltung nur von den
Kennwerten der Bauelemente des Gegenkopplungsnetzwerkes abhängig.
Nachfolgend werden die Auswirkungen realer Kennwerte des OPV auf die Schaltungseigenschaften
untersucht (Fehlereinflüsse). Dabei wird der OPV bis auf den untersuchten einzelnen Kennwert als
ideal angenommen (Superpositionsprinzip, Überlagerung der Teilwirkungen).
3.3.1
Endliche Leerlaufverstärkung, dynamischer Fehler
Bei endlicher Leerlaufverstärkung Fo des OPV wird die eingangsseitige Differenzspannung UD
U
U
nicht mehr auf Null ausgeregelt, sondern es entsteht eine Nullabweichung U D = F a [ Fa max .
o
o
Die Auswirkungen auf die Ausgangsspannung Uo in gegengekoppelten Schaltungen wird am
Beispiel der invertierenden und nichtinvertierenden Grundschaltung gezeigt (Bild 3.12). Die
Ergebnisse sind entsprechend modifiziert auf alle anderen OPV-Schaltungen übertragbar.
I1
R1
R2
1
I2
2 Fo
+
Ue
R1
I1
Uo
Ue
I 1 + I 2 = 0 für I e− = 0 ; U D = U 2 − U 1 =
I1 =
Ue − U1
R1
U1 = −
I2 =
Uo − U1
R2
Uo
, U2 = 0
Fo
Uo = −
R2
U
R1 e
1
R
1
1+
(1 + 2 )
Fo
R1
I2
Fo
+
2
invertierend
R2
1
Uo
nichtinvertierend
Uo
Fo
I1 = −
U1
R1
U2 = Ue, U1 = Ue −
U o = (1 +
R2
) Ue
R1
Uo
Fo
1
R
1
1+
(1 + 2 )
Fo
R1
Bild 3.12: Zum Einfluß endlicher Leerlaufverstärkung Fo
In beiden Grundschaltungen wird die Abweichung gegenüber der idealen Übertragungsfunktion
durch die Schleifenverstärkung Ko Fo bestimmt. Der relative Verstärkungsfehler ergibt sich zu
=
1 = 1 (1 + R 2 ) = 1 R 1 + R 2 .
R1
R1
KoFo Fo
Fo
{ Damit der OPV die äußere (ideale) Verstärkung möglichst wenig beeinflußt, muß |Ko Fo | sehr
groß sein. Dazu werden OPV mit hoher Leerlaufverstärkung Fo benötigt.
3. Operationsverstärker
49
Die Leerlaufverstärkung Fo eines OPV ist von Null bis zu mittleren Frequenzen nahezu unabhängig
von der Frequenz, sinkt dann aber bei höheren Frequenzen ab (Schalt- und Lastkapazitäten).
Verbunden mit diesem frequenzabhängigen Verstärkungsabfall ist eine Phasenverschiebung
zwischen Ein- und Ausgangssignal, was sich sowohl auf die Stabilität als auch auf die Genauigkeit
der betreffenden gegengekoppelten Schaltung auswirkt (vgl. auch Abschnitt 1).
{ Stabilität und dynamischer Fehler einer gegengekoppelten OPV-Schaltung stehen in engem
Zusammenhang mit den Frequenzgängen Fo(p) des OPV und Ko(p) des Gegenkopplungsnetzwerkes, also mit der Schleifenverstärkung Ko Fo .
V
o
Wird eine frequenzabhängige Leerlaufverstärkung F o (p) = 1 + pT
angenommen, so erhält man für
o
das Beispiel der invertierenden Verstärkerschaltung die Übertragungsfunktion
Uo
R
=− 2
Ue
R1 1 +
1
1
K o F o (p)
=−
R2
1
R 1 1 + (p)
mit K o =
R1
.
R1 + R2
1 + pT o
Der Ausdruck (p) = K F1 (p) = K V wird auch als dynamischer Fehler bezeichnet.
o o
o o
Er ist ein Maß für die frequenzabhängige Abweichung des Übertragungsverhaltens der Schaltung
infolge endlicher Verstärkung Fo(p) des OPV gegenüber dem idealen Übertragungsverhalten der
OPV-Schaltung.
{ Für Frequenzen f [ 21. T ist dieser Fehler umgekehrt proportional zum Betrag |Ko Fo | bei
o
niedrigen Frequenzen und läßt sich aus dem Bode-Diagramm dieses Frequenzganges leicht
ablesen (Bild 3.13).
{ Für Frequenzen f > 21. T wächst der Fehler (p) gegenüber den Werten bei niedrigen
o
Frequenzen weiter an, da | Ko Fo | typisch mit etwa 20 dB/Dekade absinkt.
|F|
dB
Fo (p)
80
60
40
20
K o1 Fo
0,1 %
K o2 Fo
1%
K o3 Fo
10 %
lg f
1
To
Bild 3.13: Zum dynamischen Fehler (p) = K F1 (p) in gegengekoppelten OPV-Schaltungen
o o
50
3. Operationsverstärker
V
o
Mit F o (p) = 1 + pT
erhält man für die invertierende Verstärkerschaltung die Übertragungsfunktion
o
Uo
R
=− 2
Ue
R1
mit
V& = −
1
.
(1 +
To
1 ) (1 + p
)
Ko Vo
1 + Ko Vo
R2
1
R1 1 + 1
Ko Vo
und
T &o =
=
V&
1 + pT &o
To
.
1 + Ko Vo
Damit wird die aus Abschnitt 1 bekannte Aussage bestätigt, daß durch reelle Gegenkopplung und
damit bei geringerer "äußerer" Verstärkung die Bandbreite wächst (f o& = 21T & ), vorausgesetzt, das
o
System ist stabil und | F | fällt mit 20 dB/Dekade ab (Bild 3.14).
|F|
dB
Fo (p)
80
60
F (p)
1
40
F2 (p)
20
F3 (p)
F4 (p)
1
To
1
T*
o1
1
T*
o2
1
T*
o3
1
T*
o4
lg f
Bild 3.14: Zur Bandbreitenerhöhung in gegengekoppelten OPV-Schaltungen
Die direkte Abhängigkeit der Bandbreite von der Verstärkung V l K1 der Schaltung bereitet in
0
einigen Anwendungen Probleme, z. B. bei Schaltungen mit variabler Verstärkung, in Meßwert- und
Datenerfassungssystemen.
{ Durch den Einsatz spezieller Verstärker, sogenannter Transimpedanz-Verstärker, kann diese
direkte Abhängigkeit weitgehend vermieden werden (vgl. Abschnitt 3.5).
In Näherung kann auch die Anstiegs- und Abfallzeit der Übergangsfunktion (Sprungantwort) des
gegengekoppelten Verstärkers im Zeitbereich aus seiner oberen Grenzfrequenz f o& (3-dB-Abfall)
ermittelt werden:
t r, f =
0, 35
.
f o&
3. Operationsverstärker
3.3.2
51
Wirksamer Ausgangswiderstand
Zur Berechnung von Innenwiderständen Ri aktiver Schaltungen wird grundsätzlich genau wie in der
Meßtechnik vorgegangen: Am interessierenden Knoten i der Schaltung (Ersatzschaltung) wird ein
konstanter Meßstrom IM eingespeist und die Spannung Ui am Knoten i berechnet. Der gesuchte
Innenwiderstand Ri ergibt sich aus dem Verhältnis der berechneten Meßspannung Ui (IM ) und dem
U
eingespeisten Meßstrom IM zu R i = I i , ein Zahlenwert für IM wird dabei nicht benötigt.
M
R2
R1
Ia
R2
R1
Uo I M
1
1
ya
m
I a = - y a Fo (U1 - U m )
a)
Ue
b)
Ia
ra
Ua
Uo
m
Ua = F o (U m- U1)
Bild 3.15: Ersatzschaltung der invertierenden OPV-Grundschaltung
a) zur Berechnung des Ausgangswiderstandes
b) Einfluß des Ausgangswiderstandes des OPV auf die Ausgangsspannung
Die Analyse mittels Admittanzmatrixgleichung liefert
y1 + y2
−y2 + ya F o
r &a =
−y 2
y2 + y a
U1
Uo
=
0
IM
y1 + y 2
Uo
=
IM
(y1 + y2 ) (y2 + ya ) − y 2 (y2 − y a F o )
= ra
1
1
1
.
= ra
l ra
y2
ra
y1 y2
1
+
K
oFo
1 + K o Fo +
1 + y 1 + y2 F o + y1 + y2 r a
R 1 || R 2
Zahlenbeispiel: ra = 100 (Ausgangswiderstand des OPV), Ko Fo = 10 4
__
> r &a l 10 m .
{ Der wirksame Ausgangswiderstand r &a einer gegengekoppelten OPV-Schaltung ist etwa um
den Gegenkopplungsgrad (1 + Ko Fo ) kleiner als der Ausgangswiderstand ra des OPV selbst.
Für die Ausgangsspannung Uo der Schaltung in Bild 3.15 b) gilt
Uo = −
R2
Ir
R
U − a a (1 + 2 )
R1 e
Fo
R1
1
.
R1 + R2
1+
R1 Fo
Der Spannungsabfall über ra kann in den meisten Anwendungsfällen bei der Bestimmung der
Ausgangsspannung Uo der Schaltung vernachlässigt werden (vgl. idealer OPV).
Bei Ko Fo = 104 und Ia [ 2 mA bewirkt ein Ausgangswiderstand ra = 100 des realen OPV eine
I r
Fehlerspannung von maximal Ka Fa = 20 V gegenüber der idealen Berechnung von Uo .
o
o
52
3. Operationsverstärker
3.3.3
Eingangswiderstand
Für hinreichend große Leerlaufverstärkung Fo ergibt sich für die invertierende Grundschaltung der
Eingangswiderstand Rein = R 1 , für den invertierenden Summierer gilt Rein,i = R i (Bild 3.11).
{ Jede Spannungssignalquelle Ui wird mit dem Eingangswiderstand Ri belastet.
{ Gleichtakt- und Differenzeingangswiderstand des OPV (vgl. Ersatzschaltung in Bild 3.4)
werden durch die Gegenkopplung fast vollständig unwirksam.
Für die nichtinvertierende Grundschaltung nach Bild 3.7 ergibt sich dagegen für den wirksamen
Eingangswiderstand der Schaltung (am nichtinvertierenden Eingang s+) in guter Näherung der
Wert des Gleichtakteingangswiderstandes Re+ des OPV. Typische Werte dafür sind Re+ > 10 M .
Beim nichtinvertierenden Summierer nach Bild 3.11 wird der Eingangswiderstand der Schaltung
durch die Widerstände des Spannungsteilers bestimmt: So sieht die Signalquelle U1 in Bild 3.11
einen Eingangswiderstand R1 ein = R1* + R2* || R0* .
Beim einfachen Differenzverstärker mit OPV nach Bild 3.9 sind die Eingangswiderstände für die
beiden Signalquellen unterschiedlich: Quelle U1 wird mit R1 , Quelle U2 mit (R3 + R4 ) belastet.
Eine Differenzquelle Ud = U2 - U1 sieht wegen UD = 0 den Eingangswiderstand Rd = R1 + R3 .
3.3.4
Endliche Gleichtaktunterdrückung
Die Eingangsstufe der meisten OPV ist als Differenzverstärker ausgeführt. Deshalb muß zwischen
einer Differenzverstärkung VD und einer Gleichtaktverstärkung Vgl unterschieden werden.
{ Gleichtaktaussteuerung tritt bei nichtinvertierenden Verstärkern und Differenzverstärkern
auf. Sie wird durch Unsymmetrien in der Differenzeingangsstufe der OPV bewirkt und kann
bereits bei kleinen Signalspannungen am Eingang wegen der Gleichtaktverstärkung eines
realen OPV zu großen Fehlern im Ausgangssignal führen.
{ Die Gleichtaktaussteuerung muß bei Anwendungen mit hohen Genauigkeitsanforderungen
berücksichtigt werden (vgl. auch Instrumentationsverstärker). Für die Gleichtakteingangsspannung gilt Ugl l Ue beim nichtinvertierenden Verstärker bzw. UD = Ue1 - Ue2 + Ugl beim
Differenzverstärker.
Bei unterschiedlichen Verstärkungen der beiden OPV-Kanäle gilt für die gesteuerte Quelle Ua
(siehe Ersatzschaltbild) Ua = -V1 . Us- + V2 . Us+ . Mit den Definitionen für die Differenzspannung UD
und die Gleichtaktspannung Ugl [UD = Us+ - Us- , U gl = 12 (U s− + U s+ ) ] folgt daraus
U s− = U gl − 1 U D bzw. U s+ = U gl + 1 U D .
2
2
Damit gilt für die Ausgangsspannung
U a = (V 2 − V 1 ) U gl +
V2 + V1
V + V1
U D = V gl U gl + V D U D mit V D := 2
, V gl := V 2 − V 1 .
2
2
{ Die Differenzverstärkung VD ergibt sich als arithmetisches Mittel, die Gleichtaktverstärkung
Vgl als Differenz der beiden Kanalverstärkungen V1, V2 (Vorzeichen beachten !).
3. Operationsverstärker
53
Ersetzt man die Gleichtaktverstärkung Vgl durch die Gleichtaktunterdrückung G (CMRR), so folgt
für die Ausgangsspannung
U a = V D (U D +
U gl
V + V1
V
.
) mit G = D = 1 2
V gl 2 V 2 − V 1
G
Im Ersatzschaltbild eines OPV kann seine Gleichtaktverstärkung VG am einfachsten durch eine
U gl
Spannungsquelle G in Reihe zu einem der beiden OPV-Eingänge netzwerkgerecht beschrieben
werden (Bild 3.16 a).
{ Typische Werte für Universal-OPV sind Uglmax = ± 5 V und G = 103 ... 104. Das Vorzeichen
von Ugl ist exemplarabhängig, bei einer Analyse muß deshalb mit ± Ugl gerechnet werden.
Bei steigender Signalfrequenz sinkt die Gleichtaktunterdrückung G eines OPV.
V=V
D
-
UD
Uo
+
U gl
G
U1
R1
U2
UD
R3
+
Uo
R4
Ugl
a) Gleichtaktverstärkung eines OPV
R2
b) Gleichtaktansteuerung einer
OPV-Schaltung
Bild 3.16: Zur Gleichtaktaussteuerung in OPV-Schaltungen
Bei Differenzverstärkerschaltungen mit OPV bewirken bereits kleinste Abweichungen von den
R
R
idealen Widerstandsverhältnissen R 2 = R 4 (im % - %o - Bereich) eine Gleichtaktübertragung und
1
3
damit auch bei sonst idealem OPV (UD = 0) einen Ausgangsfehler (Bild 3.16 b).
R
R
Setzt man z. B. R 2 = V, R 4 = V + und U 1 = U 2 = U gl , also UD = 0, so folgt für die wirksame
1
3
Gleichtaktverstärkung Vgl bzw. für die Gleichtaktunterdrückung G der Schaltung
R4 R2
−
R
R1
V gl =
= 3
1++V 1++V
bzw.
V(1 + + V )
G = VV =
.
gl
{ Bei konstanter Verstärkung V ist bei idealen OPV die Gleichtaktunterdrückung der Schaltung
umgekehrt proportional zur Toleranz der Widerstandsverhältnisse.
{ Bei Schaltungen mit realen OPV kann die wirksame Gleichtaktverstärkung Vgl durch eine
R
R
geringfügige Variation des Widerstandsverhältnisses R 4 l R 2 zumindest verringert und so
3
1
die endliche Gleichtaktunterdrückung G der Schaltung weiter angehoben werden (vgl. auch
Instrumentationsverstärker).
54
3. Operationsverstärker
3.3.5
Einfluß von Offset-, Drift- und Ruhegrößen
Die wichtigsten Fehlerquellen bei der Verstärkung kleiner Signalspannungen und/oder -ströme sind
die Eingangsruheströme Ie+ und Ie- der beiden OPV-Eingänge, die Eingangsoffsetspannung Uoff
sowie die Drift dieser Größen infolge Temperatur- und Betriebsspannungseinfluß sowie Alterung
(Langzeitdrift). Bei den meisten Anwendungen überwiegt der Temperatureinfluß.
Ruheströme und Offsetspannung werden im Ersatzschaltbild eines OPV durch entsprechende
Quellen beschrieben und damit einer Analyse zugänglich gemacht (siehe auch Bild 3.4).
{ Die Eingangsruheströme Ie+ und Ie- sind bei bipolaren Eingangsstufen die Basisruheströme
der Transistoren der Differenz-Eingangsstufe (Arbeitspunktströme). In Datenblättern wird als
I +I
Ruhestrom meist I e = I Bias = e+ 2 e− angegeben.
{ Die Differenz der beiden Ruheströme wird als Eingangsoffsetstrom Ioff = Ie+ - Ie- bezeichnet.
{ Die Eingangsoffsetspannung Uoff entsteht infolge von Unsymmetrien im Aufbau von OPV.
Sie ist eine Fehlspannung, die eingangsseitig angeschaltet werden muß, damit für Ie+ = Ie- = 0
und Ue = 0 auch die Ausgangsspannung UO = 0 wird.
R2
R1
U s-
IeUoff
U s+
I e+
U's-
ra
U's+
Ua
R3
UO
U a = Fo(U's+ - U's- )
Bild 3.17: Ersatzschaltung zur Bestimmung der Ausgangsoffsetspannung
In der Schaltung nach Bild 3.17 erzeugen die Ruheströme an den Widerständen des
Eingangskreises Spannungsabfälle, die eine Ausgangsoffsetspannung bewirken, auch wenn kein
Eingangssignal anliegt. Wegen Ue = 0 gilt diese Ersatzschaltung für beide Grundschaltungen.
Unter Annahme eines bis auf die Eingangsruheströme und die Eingangsoffsetspannung idealen
OPVs (S = ya F o d ∞ ), erhält man für diese Ausgangsoffsetspannung UOoff :
U Ooff = R 3 1 +
R2
R
I − R 2 I e− + 1 + 2 U off .
R 1 e+
R1
{ Bei vorhandenem Eingangssignal, also Verstärkerbetrieb, überlagert sich diese Fehlspannung
der Ausgangssignalspannung.
3. Operationsverstärker
55
Der Einfluß der Ruheströme läßt sich auf den Einfluß ihrer Differenz Ie+ - Ie- := Ioff reduzieren, wenn
für die Widerstandsbemessung R3 = R2 || R1 gewählt wird (Widerstandssymmetrierung). Wegen des
kleineren Fehleranteiles infolge der endlichen Eingangsströme wird meist auch bei invertierenden
Verstärkerschaltungen ein Widerstand R3 = R1 || R2 vom nichtinvertierenden Eingang nach Masse
geschaltet. Für die Ausgangsoffsetspannung bei Widerstandssymmetrierung gilt
U Ooff = R 2 I off + (1 +
R2
) U off
R1
mit I off := (I e+ − I e− ) .
{ Die Differenz der Eingangsruheströme wird als Kennwert Eingangsoffsetstrom Ioff := Ie+ - Iein den Datenblättern angegeben und ist typisch um eine Größenordnung kleiner als die
Ruheströme selbst.
{ Der Einfluß der Eingangsoffsetspannung Uoff kann durch eine Offsetkompensation beseitigt
oder zumindest verringert werden. Dazu wird an einem der beiden OPV-Eingänge eine kleine
Gleichspannung (wenige mV) über eine zusätzliche Schaltung mit driftarmen Bauelementen
und stabilisierter Spannung eingespeist (Bild 3.18). Verfügt der OPV über entsprechende
Anschlüsse, so wird die Offsetkompensation einfacher und besser hier vorgenommen (vgl.
auch Bild 3.2). Ein zusätzlicher Vorteil dabei ist, daß die Eingänge für die funktionelle
Beschaltung frei bleiben.
+
Ue
R1
50 k
R2
100 k
+
-
100 k
+
Uo
R1
50 k
-
100
100
R2
+
Uo
Ue
Bild 3.18: Schaltungsbeispiele zur Offsetkompensation
Nach dem Offsetabgleich bleibt der Driftanteil der Ruheströme und der Eingangsoffsetspannung
als Fehlerspannung, die sich i.a. nur durch sehr aufwendige Zerhackerverstärker oder zusätzliche
Meßzyklen mit analoger Speicherung kompensieren läßt:
U oDrift = 1 +
R2
U off + R 2 I eoff .
R1
{ Dieser zeit- und temperaturabhängige Driftanteil der Offsetgrößen in der Ausgangsspannung
begrenzt die Genauigkeit und die maximal mögliche Verstärkung, insbesondere bei kleinen
Eingangssignalen. Die Verstärkung darf sinnvoll nur so groß sein, daß der Verstärker durch
diesen Driftanteil nicht übersteuert wird.
Aus den angegebenen Beziehungen ergeben sich u.a. folgende allgemeine Schlußfolgerungen für
den Einsatz von OPV in Verstärkerschaltungen:
{ Bei Verstärkung kleiner Gleichspannungen (niederohmige Signalquelle, kleine Werte für R1)
sollten OPV eine möglichst geringe Eingangsoffsetspannungsdrift besitzen.
{ Zur Verstärkung kleiner Gleichströme (hochohmige Signalquelle, große Werte für R1||R2)
werden OPV mit möglichst geringer Stromdrift benötigt.
56
3. Operationsverstärker
3.3.6
Einfluß der Toleranz der Bauelemente
Der Einfluß der Toleranz der Bauelemente des Funktionsnetzwerkes (Widerstände, Kondensatoren)
läßt sich aus der idealen Übertragungsgleichung bestimmen. Beispielhaft wird der invertierende
Summierer (vgl. Bild 3.11) betrachtet. Für die Ausgangsspannung dieser Schaltung gilt bei
Annahme eines idealen OPV allgemein:
n R
m
Uo = − o U i − R o Ij .
R
i=1
j=1
i
Werden vereinfachend nur Spannungseinspeisungen angenommen, so gilt entsprechend
n R
Uo = − o Ui .
i = 1 Ri
Über das totale Differential für diesen Ausdruck erhält man daraus für den relativen Fehler der
Ausgangsspannung UO in Abhängigkeit der Bauelementetoleranzen R :
n
dU o U o R o
l
=
−
Uo
Uo
Ro
Ro
U i R i
R 2i
.
n R
o
Ui
i= 1 Ri
i=1
Für einen einzigen Eingang (n = 1) ist dieser Ausdruck leicht interpretierbar:
U o
R o
R 1
=
−
[ 2 ( R ) max .
Uo
Ro
R1
R
{ Bei betragsmäßig begrenzter Toleranz der Widerstände ist der dadurch bewirkte relative
Fehler der Ausgangsspannung immer kleiner als die doppelte maximale Bauelementetoleranz.
{ Die Toleranz der Rückführimpedanz RO kann durch die Toleranz der Eingangsimpedanz R1
kompensiert werden, wenn die Abweichungen gleiche Vorzeichen haben.
R
R
Ist die Toleranz aller Bauelemente betragsmäßig begrenzt und gilt | R i | , | R o | [ | R
| , so
R max
i
o
kann auch bei beliebiger Anzahl von Eingängen die Toleranz des Ausgangssignales nicht größer als
die doppelte maximale Bauelementetoleranz werden
U o
[ 2 ( R ) max .
Uo
R
{ Für große Widerstandswerte können demnach in OPV-Schaltungen auch größere absolute
Toleranzen zugelassen werden.
Beispiel: Invertierender Summierer mit zwei Eingängen
U
Für Ro = R1 = 10 k ! 1% , R2 = 100 k ! 1% wird U o [ 2 % .
o
{ Für Präzisionsanwendungen werden hochgenaue Bauelemente benötigt. Der Einfluß realer
OPV-Kennwerte muß erst berücksichtigt werden, wenn der durch sie verursachte Fehler in
die gleiche Größenordnung kommt wie der durch die Toleranzen der eingesetzten
Bauelemente bewirkte Fehler.
3. Operationsverstärker
3.3.7
57
Analysebeispiele von Verstärker-Schaltungen
Nachfolgend werden die Übertragungsgleichungen von Verstärkerschaltungen mittels Knotensatz
in herkömmlicher Weise ermittelt. Für die OPV werden reale Kennwerte (Leerlaufverstärkung V0 ,
Ausgangswiderstand R0 , Eingangsruheströme Ie- und Ie+ ) angenommen. Die Übereinstimmung mit
den o.g. Berechnungen mittels Admittanzmatrixgleichung kann der interessierte Leser leicht selbst
überprüfen.
Beispiel 1: Differenzverstärker
Bild A1 zeigt die Grundschaltung eines Differenzverstärkers mit OPV. Für die Analyse sollen als
reale Kennwerte des OPVs eine endliche Leerlaufverstärkung V0 , der Ausgangswiderstand RO und
die Eingangsruheströme Ie- und Ie+ berücksichtigt werden. Damit erhalten wir das angegebene
Ersatznetzwerk.
R1
I1
Ue1
I
I
Ue2
3
R2
UI
e-
UN
R3
I
I
e+
I2
Funktionsgleichung des OPV:
RO
R4
UO = V0 ( U N - UI )
IO
+
4
IL
UO
Ua
Bild 319: Differenzverstärkerschaltung mit OPV
Mit den Knotenspannungen und Zweigströmen nach Bild A1 folgt aus dem Knotensatz:
IO − I2 − IL = 0
d
UO − Ua Ua − UI
−
− IL = 0 ,
RO
R2
(1)
I 1 + I 2 + I e− = 0
d
U e1 − U I U a − U I
+
+ I e− = 0 ,
R1
R2
(2)
I 3 − I 4 + I e+ = 0
d
U e2 − U N U N
−
+ I e+ = 0 .
R3
R4
(3)
Es gilt:
U O = V 0 (U N − U I )
(OPV-Relation).
(4)
Umformung liefert:
RO
(U a − U I ) + R O I L ,
R2
(5)
R2
R
U + (1 + 2 ) U I − R 2 I e− ,
R 1 e1
R1
(6)
UO − Ua =
Ua = −
0 =
R4
R
U − (1 + 4 ) U N + R 4 I e+ .
R 3 e2
R3
(7)
58
3. Operationsverstärker
Addition der Gln. (6) und (7) liefert:
Ua =
R4
R
R
R
U − 2 U − (1 + 4 ) U N + (1 + 2 ) U I + R 4 I e+ − R 2 I e−
R 3 e2 R 1 e1
R3
R1
R
(8)
R
bzw. mit V := R 4 = R 2 ; Z := R 4 = R 2
3
1
(9)
U a = V (U e2 − U e1 ) − (1 + V) (U N − U I ) + Z (I e+ − I e− ) .
(10)
Mit der OPV-Relation Gl. (4) folgt weiter
U a = V (U e2 − U e1 ) + Z (I e+ − I e− ) − 1 + V U O .
V0
(11)
Aus Gleichung (1) erhalten wir U0 = Ua + R0 I0 und damit
U a = V (U e2 − U e1 ) + Z (I e+ − I e− ) − 1 + V R O I O
V0
1
.
1
1+ +V
V0
(12)
Werden auch noch die Kennwerte Eingangsoffsetspannung Uoff und Gleichtakteingangsspannung
Ugl des OPVs berücksichtigt, so erhalten wir
U a = V (U e2 − U e1 ) + Z (I e+ − I e− ) + (1 + V) (U off + U gl ) − 1 + V R O I O
V0
1
.
1
1+ +V
V0
(13)
{ Die Realisierung eines Differenzverstärkers mit OPV nach Bild 3.19 mit der Verstärkung V
erfordert eine spezifische Bemessung der Widerstände gemäß Gl. (9). Dabei ist nur das
Widerstandsverhältnis an den beiden Eingängen von Bedeutung.
{ Die Minimierung des Fehlers infolge des Eingangsoffsetstromes Ioff = (Ie+ - Ie-) erfordert die
Bedingung Z := R2 = R4 (Widerstandssymmetrierung).
{ Praktisch sind meist beide Forderungen gleichzeitig zu erfüllen, also R2 = R4 und R1 = R3
bzw. R2 || R1 = R4 || R3 bzw. y1 + y2 = y3 + y4. Dieser Gleichlauf von zwei Widerstandswerten ist
insbesondere bei variabler bzw. programmierbarer Differenzverstärkung V zu beachten.
Hinweis:
Die Minimierung des Fehlers infolge des Eingangsoffsetstromes Ioff = (Ie+ - Ie- ) wird typisch auch
dann angewendet, wenn nur ein Eingang beschaltet wird (invertierender bzw. nichtinvertierender
Verstärker, Integrator usw.). Am funktionell nicht benötigten Eingang wird ein Widerstand bzw.
ein Netzwerk angeschaltet, welches die o.g. Bedingung Z := R2 || R1 = R4 || R3 erfüllt (vgl. auch
Beispiele 2 und 3).
Bei komplexen Rückkopplungs-Netzwerken gilt für die Widerstandssymmetrierung allgemeiner,
daß die Summe der Leitwerte an den beiden Eingängen des OPV gleich sein soll, also ∑ yIk = ∑ yNj .
3. Operationsverstärker
59
Beispiel 2: Invertierender Verstärker
Mit den Knotenspannungen und Zweigströmen nach Bild 3.20 folgt:
IO − I2 − IL = 0
d
UO − Ua Ua − UI
−
− IL = 0 ,
RO
R2
I 1 + I 2 + I e− = 0
d
U e1 − U I U a − U I
+
+ I e− = 0 ,
R1
R2
− I 4 + I e+ = 0
d
−
UN
+ I e+ = 0 .
R&
{ Die Beachtung der Eingangsoffsetspannung Uoff und der Gleichtakteingangsspannung Ugl
erfordert eine Modifikation der OPV-Relation: U'N = UN + Uoff + Ugl (Bild 3.20).
Ue1
R1
I1
I e-
I4
R*
I
2
Funktionsgleichung des OPV:
-
RO
U'N
UN
Ie+
R2
UI
IL
UO = V0 ( U'N - U I )
IO
+
Uoff Ugl
UO
Ua
U'N = Ugl+ Uoff + U N
Bild 3.20: Invertierender Verstärker mit OPV (reale Kennwerte)
R
Für eine Dimensionierung V := R 2 ; R* = R1 || R2 erhalten wir:
1
U a = −V U e1 + R 2 (I e+ − I e− ) + (1 + V) (U off + U gl ) − 1 + V R O I O
V0
1
.
1
1+ +V
V0
(14)
60
3. Operationsverstärker
Beispiel 3: Nichtinvertierender Verstärker
In gleicher Weise wird die Übertragungsgleichung einer nichtinvertierenden Verstärkerschaltung
bei realen Kennwerten des OPV bestimmt (Bild 3.21):
IO − I2 − IL = 0
d
UO − Ua Ua − UI
−
− IL = 0 ,
RO
R2
I 2 + I e− = 0
d
Ua − UI
+ I e− = 0 ,
R2
I 3 − I 4 + I e+ = 0
d
U e2 − U N U N
∏
−
+ I e+ = 0 mit U N = U N + U off + U gl .
R3
R4
R2
UI
I e-
Ue2
I3
R3
I e+
UN
I4
U'N
Uoff Ugl
R4
I
2
RO
IL
IO
+
Ua
UO
Funktionsgleichung des OPV: UO = V0 ( U'N - U I ) mit U'N = Ugl+ Uoff + U N
Bild 3.21: Nichtinvertierender Verstärker mit OPV (reale Parameter)
Mit Z := R3 || R4 = R2 erhalten wir:
Ua =
R4
U + Z (I e+ − I e− ) + (U off + U gl ) − 1 R O I O
R 3 + R 4 e2
V0
1
.
1+ 1
V0
(15)
{ Speziell für R4 → ∞ erhalten wir den sogenannten Spannungsfolger (nichtinvertierender
Verstärker mit einer Signalverstärkung V = 1):
U a = U e2 + Z (I e+ − I e− ) + (U off + U gl ) − 1 R O I O
V0
1
.
1+ 1
V0
(16)
{ Hier realisiert R2:= R3||R4 die Widerstandssymmetrierung zur Minimierung des Fehlers
infolge des Eingangs-Offsetstromes Ioff = Ie+ - Ie- .
3. Operationsverstärker
3.4
61
Dynamisches Verhalten (Slew Rate)
Die maximale Anstiegsgeschwindigkeit der Ausgangsspannung eines OPV ist in starkem Maße von
seiner Ansteuerung und Aussteuerung abhängig. Sie ist bei Kleinsignalaussteuerung i.a. wesentlich
größer als bei Großsignalaussteuerung (übersteuerter Betrieb).
3.4.1
Kleinsignalaussteuerung
Wird ein OPV innerhalb seines linearen Aussteuerbereiches betrieben (vgl. Bild 3.1) , so spricht
man von Kleinsignalaussteuerung. Es besteht ein fester Zusammenhang zwischen der maximalen
Anstiegsgeschwindigkeit der Ausgangsspannung und der Bandbreite bzw. oberen Grenzfrequenz
des Verstärkers. Kann der Frequenzgang als Verzögerungsglied 1.Ordnung beschrieben werden, so
gilt für die Übertragungsfunktion der nichtgegengekoppelten Schaltung (vgl. auch Abschnitt 2.2):
F(p) =
pT u
Uo
Vo
=
U e 1 + pT o 1 + pT u
mit T o = *1o
und T u = *1u .
Bei einer sprungförmigen Eingangsspannung Ue entsteht im Zeitbereich das Ausgangssignal
t
t
−
−
u o (t ) = V o U e (e T u − e T o ) .
Für Breitbandverstärker (Tu >> To ) und kleine Zeiten t << To folgt die oft verwendete Näherung
t
T
u o (t ) = V o U e (1 − e o ) .
−
Für die Anstiegszeiten tr , tf der Übergangsfunktion (Sprungantwort) gilt
t r,f = 2, 2 T o =
2, 2
0, 35
.
l
2f o
fo
Für die maximale Anstiegsgeschwindigkeit bei sinusförmiger Ansteuerung (bei t = 0) erhält man
(mit fS - Schnittfrequenz mit 0-dB-Achse, also |Ko Fo | = 1):
|
3.4.2
du o
V U
| = o T e max = 2 f o V o U e max = 2 f S U e max .
dt max
o
Großsignalaussteuerung
Wird der Verstärker oder einzelne Stufen übersteuert, so spricht man von Großsignalaussteuerung.
{ Der OPV arbeitet jetzt als nichtlineares System (Schalterbetrieb).
Die maximale Anstiegsgeschwindigkeit der Ausgangsspannung bei Großsignalaussteuerung wird
Slew Rate Sr genannt (Bild 3.22). Sie ist meist wesentlich kleiner als die Anstiegsgeschwindigkeit
im Kleinsignalbetrieb, da der begrenzte Ausgangsstrom des OPV die Schalt- und Lastkapazitäten
nicht beliebig schnell umladen kann. Bild 3.22 zeigt die Ausgangsspannung eines OPVs, der mit
großen Rechteckimpulsen am Eingang angesteuert wird. Die Differenzverstärkerstufe symbolisiert
die Eingangsstufe des OPVs.
62
3. Operationsverstärker
Zur Erklärung der Zusammenhänge wird vereinfachend angenommen, daß im Ruhezustand der
Kollektorgleichstrom I C1 l I C2 l 12 I o fließt und der Kondensator C aufgeladen ist, also kein
Kondensatorstrom fließt (UC = konstant).
U+
+ U CC
Uo
RC
0
∆ Uo
U-
t
I C1
tr
V1
I C2
T1
T2
C
UC
Uo
Io
-U
CC
Bild 3.22: Zur Begriffserklärung Slew Rate /4/
U
Wird nun eine Rechteckspannung genügend großer Amplitude U D > Vo max an die Eingänge des
o
Differenzverstärkers gelegt, so wird z. B. Transistor T1 gesperrt und Transistor T2 muß den ganzen
Strom Io übernehmen. Wegen der Eigenschaft eines Kondensators, die Spannung zu klemmen, also
konstant zu halten, kann sich der Strom durch RC nicht sprungförmig ändern. Die Stromänderung
muß durch die Ladung des Kondensators aufgebracht werden, d.h. durch den Kondensator C fließt
jetzt ein Strom I = I C2 − I o l 12 I o . Das bewirkt eine Änderung der Kondensatorspannung mit der
maximalen Änderungsgeschwindigkeit von
I
dU C
| = I = o
dt max
C
2C
bzw.
tr l
U + − U − U o
=
.
Sr
Sr
Wegen Uo = V1 . UC ergibt sich damit die Slew Rate Sr der OPV-Ausgangsspannung zu
Sr =
dU o
I
|
= V 1 I = V 1 o .
C
2C
dt max
{ Die Slew Rate Sr eines OPV läßt sich nur vergrößern, indem die Stromänderung I und/oder
die Teilverstärkung V1 größer und/oder die Kapazität C kleiner gewählt werden.
Slew Rate und Grenzfrequenz bei maximaler Aussteuerung
Bei Großsignalaussteuerung des OPVs besteht ebenfalls ein fester Zusammenhang zwischen der
oberen Grenzfrequenz f* (bei maximaler Ausgangsamplitude) und der maximal möglichen
Anstiegsgeschwindigkeit:
{ Mit steigender (Signal-)Frequenz sinkt die maximal erreichbare Ausgangsamplitude, ebenso
die Leerlaufverstärkung des OPV. Um die maximale Ausgangsamplitude aufrechtzuerhalten,
wird ein immer größeres Eingangssignal notwendig. Das führt schließlich zur Übersteuerung
des OPV und damit zu einer durch die Slew Rate Sr begrenzten Anstiegsgeschwindigkeit der
Ausgangsspannung (vgl. auch Bild 3.23).
3. Operationsverstärker
63
.
Eine Sinusspannung u o = U o sin *t hat ihre größte Änderungsgeschwindigkeit im Nulldurchgang
.
du
der Sinusschwingung. Sie beträgt ( dto ) max = 2 f U o und wächst offensichtlich mit der Frequenz.
Die maximale Anstiegsgeschwindigkeit am Verstärkerausgang ist durch die Slew Rate Sr begrenzt,
d.h. sie kann höchsten gleich diesem Wert sein
.
du o
&
|
max = 2 f U o max = S r ;
dt
f& =
Sr
.
2 U o max
.
.
{ U o max ist die maximale Ausgangsamplitude bei Vollaussteuerung und niedrigen Frequenzen,
f* ist die maximale obere Grenzfrequenz des OPV für die maximale Ausgangsspannung.
Werden nun Sinusspannungen noch höherer Frequenz f > f* an den OPV-Eingang angelegt, so
du
sinkt die Ausgangsamplitude genau so, daß stets dto = S r gilt. Man erhält
.
Uo =
Sr
Sr
=
2 f
2 f &
.
f& = f& . U
o max .
f
f
Für die maximal erreichbare Ausgangsamplitude einer Verstärkerschaltung gilt damit:
U o max für f [ f &
Uo =
S r für f > f &
2 f
.
Ursache für geringe Werte der Slew Rate sind oft auch die Kapazitäten in den Netzwerken zur
Frequenzgangkorrektur. Mitentscheidend ist die Wahl der Anschlußpunkte für diese Netzwerke.
{ Zum Erreichen einer großen Slew Rate Sr und hoher Grenzfrequenz bei voller Aussteuerung
werden die Kapazitäten möglichst in der Nähe der OPV-Eingänge angeschaltet, damit die
nachfolgende Verstärkung (V1 in Bild 3.22) noch groß genug ist (vgl. auch Abschnitt 1.2.6).
{ Moderne Operationsverstärker, besonders auch Transimpedanzverstärker, erreichen hohe
Slew-Rate-Werte bis über 3500 V/µs.
Bild 3.23 zeigt zusammenfassend noch einmal die unterschiedlichen Ursachen und Auswirkungen
des nichtlinearen Ausgangsverhaltens (Ausgangsbegrenzung) eines OPV.
{ Übersteigt die Ausgangsspannung Ua die Sättigungsspannung Uamax des OPV, so wird die
Ausgangsstufe übersteuert und der Ausgangspegel auf !Uamax begrenzt (Bild 3.23 a). In
gegengekoppelten Schaltungen kann der OPV-Eingang nicht mehr auf Null ausgeregelt
werden (fehlende Regelreserve) und es kommt zu Verzerrungen im Signalverlauf.
{ Auch wenn die Ausgangsspannung Ua infolge der eingangsseitigen Ansteuerung im linearen
Bereich Ua [ Uamax bleibt, kann es durch eine Überlastung zu einer Ausgangsspannungsbegrenzung kommen. In Bild 3.23 b) wird die Ausgangsspannung wegen zu kleinem Lastwiderstand RL auf den Pegel U a = ! R L I a max begrenzt.
64
3. Operationsverstärker
Im allgemeinen muß bei allen Aussteuerungsbedingungen für den Ausgangsstrom des OPV die
Forderung I a [ I a max eingehalten werden. Dabei ist auch der Stromanteil im Rückkopplungsnetzwerk zu beachten.
Ua
Ua
Uamax
Uamax
Ia RL
t
t
b) Stromüberlastung
a) Spannungsübersteuerung
Ua
+S r
-I a R L
-U amax
- Uamax
Ua
Uamax
Uamax
+S r
t
20 µs
1µs
-S r
t
- U amax
- U amax
-S r
c) f > f*
d) f >> f*
Bild 3.23: Nichtlineares Verhalten des OPV-Ausganges
{ Bild 3.23 c) demonstriert den Verlauf der Ausgangsspannung, wenn die Signalfrequenz nur
geringfügig größer ist als die Großsignalgrenzfrequenz f* (bei Vollaussteuerung). Ab einer
dU
Änderungsgeschwindigkeit V dt e m S r ändert sich die Ausgangsspannung nur noch mit der
maximalen Slew Rate Sr des OPV (bis sich die beiden Kurven wieder schneiden).
{ Ist die Signalfrequenz sehr hoch (f >> f*, Bild 3.23 d), so kann die Ausgangsspannung die
Maximalamplitude Uamax nicht mehr erreichen. Der OPV-Ausgang verbleibt im übersteuerten
Zustand und die Ausgangsspannung folgt einer Dreieckkurve mit dem Anstieg Sr .
Eine große kapazitive Ausgangslast kann wegen der Ausgangsstrombegrenzung I a [ I a max schon bei
viel kleineren Frequenzen zu ähnlichen Auswirkungen führen. Hauptursache für eine solche
kapazitive Last sind oft auch die Kapazitäten zur Frequenzgangkompensation. Bei einer Forderung
nach großer Slew Rate und hoher Grenzfrequenz für Vollaussteuerung sollten die Netzwerke zur
Frequenzkompensation möglichst in der Nähe des OPV-Einganges angeordnet werden.
3. Operationsverstärker
3.5
65
Transimpedanz-Verstärker
Parasitäre Effekte beschränken bei jedem Verstärker die Eigenschaften bei höheren Frequenzen.
Dazu kommt bei konventionellen OPV die Abhängigkeit der Bandbreite von der Verstärkung (vgl.
Abschnitt 3.3.1). Eine Möglichkeit zur Verringerung der Abhängigkeit Bandbreite - Verstärkung ist
die Anwendung der Stromgegenkopplung in sogenannten Transimpedanz-Verstärkern (z. B. von
Comlinear, Analog Devices). Nachfolgend werden in kurzer Form Aufbau und Wirkungsweise
dieser Schaltelemente sowie ein Vergleich mit den konventionellen OPV dargestellt.
3.5.1
Aufbau und Wirkungsweise
Der Schaltungsaufbau eines Transimpedanz-OPVs sieht zunächst etwas ungewohnt aus (Bild 3.24).
Die Eingangsstufe dient als Pufferverstärker mit V = 1 und verbindet die beiden Eingänge des
eigentlichen Verstärkers. Im Betriebsfall wird durch diese Schaltung erzwungen, daß die beiden
Spannungen U1 und U2 unabhängig von der externen Rückkopplung über Rf nahezu gleich sind.
Dadurch wird eine niedrige Eingangsimpedanz am invertierenden Eingang erreicht, die sich bei
geschlossener Schleife weiter reduziert (vgl. auch Abschnitt 3.3.3). Somit kann ungehindert Strom
in den invertierenden Eingang hinein oder aus ihm heraus fließen.
U1
U a = V R i I IN l V (U 1 − U 2 )
x1
I IN
U2
Ri
Uo
Ua (p)
I
Rf
1
R1
I f + I IN − I 1 = 0
Uo − U2
U −U
U
+ 1 R 2 − R2 = 0
Rf
i
1
If
Bild 3.24: Prinzipschaltbild eines Transimpedanz-Verstärkers
(Verstärker mit Stromgegenkopplung)
Aufgabe des Transimpedanz-Verstärkers ist die Umwandlung dieses Stromes IIN in die Ausgangsspannung Uo . Mit der Steuerfunktion für die gesteuerte Spannungsquelle Ua = V Ri IIN = A(p) IIN
folgt aus den in Bild 3.24 angegebenen Beziehungen die Ausgangsspannung Uo der Schaltung.
Dabei ist A(p) die Übertragungsfunktion des Transimpedanz-OPV, gemessen in .
U o = (1 +
Rf
)
R1
U o = (1 +
Rf
) U für A(p) d ∞.
R1 1
bzw.
R
1
U 1 mit A(p) = V . R i und R &f = R f + R i (1 + f )
R1
R &f
1+
A(p)
{ Eine Analyse der Schaltung mit Hilfe der Admittanzmatrixgleichung liefert für idealisierte
Spannungsquelle Ua (ra = 0) die gleiche Lösung (Bild 3.25).
66
3. Operationsverstärker
U1
Rf
x1
U2
ra
I
Ri
Ri
Uo
I
R1
Ua
Rf
U1
Ia
U2
Uo
ra
R1
m
I a = ya Ua mit U a = V (U 1 - U 2 ) = V Ri I
Bild 3.25: Nichtinvertierende Transimpedanz-Verstärker-Schaltung mit Ersatznetzwerk
Aus der unbestimmten Admittanzmatrixgleichung
2
o
m
y i + y 1 + yf
− y f + Vya
−(yi + y 1 + Vya )
− yf
y a + yf
− ya
− (yi + y1 )
ya
yi + y 1 + ya
U2
Uo
Um
=
yi U 1
Vya U 1
−(yi + Vya )U 1
folgt die bestimmte Admittanzmatrixgleichung (für ya d ∞, Um = 0)
2
o
yi + y 1 + yf
V
− yf
1
U2
Uo
=
yiU 1
VU 1
und daraus die Ausgangsspannung Uo mit A(p) = V . R i
Uo = U1
V (yi + y1 + yf ) − V yi
R
= (1 + f )U 1
yi + y 1 + yf + V yf
R1
1
R
R
1
1 + V 1 + R f + Rf
1
i
.
Bei einer frequenzabhängigen Verstärkung A(p) = V(p) . Ri folgt für die Ausgangsspannung in der
stromgegengekoppelten Schaltung mit Transimpedanz-Verstärker
U o = (1 +
Rf
)
R1
R
1
U 1 mit R &f = R f + (1 + f ) . R i .
R1
R &f
1+
A(p)
R&
f
Der Ausdruck T (p) = A(p)
kann als dynamischer Fehler bezeichnet werden (vgl. Abschnitt 3.3.1).
Für die nichtinvertierende OPV-Grundschaltung mit Spannungsgegenkopplung aus Abschnitt 3.3.1
dagegen gilt:
U o = (1 +
R2
)
R1
R + R2
1
.
U mit (p) = 1
R 1 F o (p)
R 1 + R 2 e+
1+
R 1 F o (p)
{ Die Gleichungen für die Ausgangsspannungen beider Schaltungen haben somit vergleichbare
Form und können einander gegenübergestellt werden.
3. Operationsverstärker
3.5.2
67
Vergleich mit konventionellen OPV
Die Gleichspannungsverstärkung ist für sehr große Werte der Verstärkungsfaktoren Ao = V. Ri d ∞
bzw. V o d ∞ in beiden Schaltungen völlig gleich:
GT = 1 +
Rf
R1
GK = 1 +
bzw.
R2
.
R1
Bei niedrigen Frequenzen und endlichen Verstärkungsfaktoren Ao bzw. Vo entsteht in jeder der
beiden Schaltungen ein relativer statischer Verstärkungsfehler. Es gilt:
Uo = GT .U1
mit
T =
1
R&
1+ f
Ao
R &f
R +R .G
= f .i T
V Ri
Ao
bzw.
U o = G K U s+
bzw.
K =
1
G
1 + VK
o
GK
= 1 .
Vo
KoVo
{ Bei konventionellen OPV-Schaltungen wird der relative Verstärkungsfehler multiplikativ
durch den Faktor der "äußeren" Verstärkung G K = K1 bestimmt.
o
{ An die Stelle dieses Faktors G K tritt bei Schaltungen mit Transimpedanz-OPV der Faktor
"Ersatz"-Widerstand Rf*. Die äußere Verstärkung GT ist darin nur additiv enthalten und wird
außerdem durch den kleinen Widerstandswert von Ri "normiert" (typisch Ri = 20 ).
A
V
o
o
Bei Annahme dynamischer Frequenzgänge A(p) = 1 + pT
erhält man somit
bzw. F o (p) =
1 + pT o
o
analog zu den Betrachtungen in Abschnitt 3.3.1:
Uo =
mit
G &T =
und
G &T
U
1 + pT o& 1
GT
R&
1+ F
Ao
T &o = T o
R &f
= To
A o + R &f
1
A
1 + &o
Rf
G &K
U
1 + pT o& s+
bzw.
Uo =
bzw.
G &K =
bzw.
T &o = T o
GK
G
1+ K
Vo
=
GK
1 + K 1V
o o
GK
1
= To
Vo + GK
1 + KoVo
Das Frequenzverhalten der beiden Verstärkertypen ist stark unterschiedlich:
{ Bei OPV-Schaltungen mit Spannungsgegenkopplung ist die Verstärkung GK als Faktor in der
Polstelle des Nenners der Übertragungsfunktion enthalten (vgl. auch Abschnitt 3.3.1).
{ Bei Schaltungen mit Transimpedanz - OPV dagegen wird der Pol mit Rf* multipliziert (die
Verstärkung GT ist darin nur additiv enthalten). Die Bandbreite ist damit bei konstantem
Rückführwiderstand Rf (fast) unabhängig von der äußeren Verstärkung. Die Verstärkung läßt
sich mit R1 bei relativ geringem Einfluß auf die Bandbreite einstellen. Bei richtiger Wahl des
Widerstandswertes für Rf (optimale Werte siehe Datenblatt) erhält man stabile Schaltungen
mit Verstärkungen GT m 1.
{ Die Berechnung der Verstärkung in Schaltungen mit Transimpedanz-OPV kann so praktisch
nach den gleichen Formeln erfolgen wie beim Einsatz konventioneller OPV.
68
3.5.3
3. Operationsverstärker
Kennwerte
Einen vergleichenden Überblick über Kennwerte von Transimpedanz-Verstärkern gibt Tafel 3.3,
ein typisches Pinout (mit Ersatzschaltung) zeigt Bild 3.26 am Beispiel des Schaltkreises AD 9610.
Parameter
Einheit
typisch
AD 9610
AD 9611
AD 846
Betriebsspannung
Ausgangsstrom
Ausgangsspannung
V
mA
V
5 ... 15
10 ... 200
10
15
50
15
40
15 (5)
50
Offsetspannung
mV
0,5
0,3
0,5
0,25
Offsetstrom
µA
2
2
Driftstrom
µA
20
20
Slew Rate
V/µs
3000
3500
ns
10 ... 100
18
13
MHz
20 ... 200
100
290
Einschwingzeit
auf (0,1%)
auf (0,01%)
3 dB- Bandbreite
450
80
110
40
Tafel 3.3: Kennwerte von Transimpedanz-Verstärkern (Quelle: Analog Devices)
Ruhestrom
2
8
U1
1
IN + 6 +
IN -
U off
12
+
x1
Rf
I off
10
9
(1,5 k)
3
11 U
OUT
Fo (p)
-
20
I in
5 -
U2
7
- U2
- U1
Charakteristische Merkmale:
Hochohmiger nichtinvertierender Eingang
niederohmiger invertierender Eingang
4
Rf
Masse
AD 9610
Bild 3.26: Ersatzschaltung eines Transimpedanz-OPV (Pinout für AD 9610, Analog Devices)
3. Operationsverstärker
3.6
3.6.1
69
Schaltungstechnische Ausführung von OPV-Stufen
Differenz-Eingangsstufe
Die Eingangsstufe ist der kritischste Teil einer OPV-Innenschaltung. Sie bestimmt alle Eingangsparameter und beeinflußt auch maßgeblich die Übertragungs- und Ausgangsparameter der gesamten
Schaltung. In Bild 3.27 ist die Grundschaltung einer Differenzeingangsstufe mit Bipolartransistoren angegeben.
UA1 - UA2
UCC
RC1
Ue1
U
e2
T1
UCC
RC2
UA1
UA2
T2
linearer
Aussteuerbereich
Io
-U
EE
Ue1 - U e2
- 0,6
0,6
Bild 3.27: Differenzverstärkerstufe mit Übertragungskennlinie
Für Ue1 = Ue2 = 0 sind beide Transistoren leitend, der Konstantstrom Io teilt sich zu gleichen Teilen
in die beiden Kollektorströme. Das gemeinsame Emitterpotential liegt auf etwa UE = - 0.6 V.
Wird nun bei Ue2 = 0 die Eingangsspannung Ue1 > 0 gesteuert, so folgt das Emitterpotential UE .
Transistor T2 wird zunehmend gesperrt, während Transistor T1 weiter aufsteuert und schließlich
den gesamten Emitterstrom Io = IC1 + IB1 aufbringt (Ue1 = 0,6 V, UE = 0).
Transistor T1 wird somit zunehmend gesättigt und ab UCE1 = UCEX folgt das Kollektorpotential UC1
der Eingangsspannung Ue1 direkt (Bild 3.27). Für Ue1 < 0 kehren sich die Verhältnisse um und
Transistor T1 wird gesperrt.
{ Aus funktionellen Gründen und entsprechend den technologischen Möglichkeiten in der
integrierten Schaltungstechnik gibt es zahlreiche Modifikationen der einfachen Differenzstufe
mit dem Ziel, eine große Stufenverstärkung, hohe Gleichtaktunterdrückung und möglichst
geringe Eingangsströme zu erreichen.
{ Grundsätzlich wird dabei die Schaltungssymmetrie der Grundschaltung aufrechterhalten, um
geringe Offset- und Driftgrößen zu garantieren.
Eine große Stufenverstärkung wird erreicht, wenn die Kollektorwiderstände in der Grundschaltung
durch sogenannte "aktive" Widerstände (Stromquellen) ersetzt werden (Bild 3.28 b). Besitzen die
Stromquellen I1 und I2 einen hohen Innenwiderstand, so ist die Verstärkung von der Größe des
Konstantstromes Io weitgehend unabhängig und ereicht Werte von VD > 1000.
U
{ Für die Verstärkung gilt näherungsweise V D l UA (UT - Temperaturspannung).
T
70
3. Operationsverstärker
+ U CC
R
R
I2
I1
E1
E
2
A1
A
2
+ U CC
E1
E2
Io
I2
I1
A1
A
2
Io
- U EE
- U EE
b) Grundschaltung mit aktiver Last
a) Grundschaltung
+ UCC
+ U CC
A1
A2
I1
E1
E1
E2
E2
Io
R
A1
R
A2
- U EE
c) Widlar-Schaltung
D
Io
- U EE
d) Bootstrap-Differenzstufe
Bild 3.28: Prinzipschaltungen der Differenzeingangsstufe von OPV
Die Widlar-Schaltung (Bild 3.28 c) entspricht der Grundschaltung mit pnp-Transistoren, besitzt
aber einen erweiterten Gleichtakt- und Differenzeingangsspannungsbereich. Der wichtigste Vorteil
ist, daß die bei anderen technischen Lösungen auftretenden Schwierigkeiten infolge der geringen
Stromverstärkung integrierter lateraler pnp-Transistoren überwunden werden.
Auch die Bootstrap-Stufe in Bild 3.28 d) ist eine Anpassung an technologische Gegebenheiten. Sie
gestattet den Einsatz sogenannter Super-Beta-Transistoren mit geringeren Durchbruchspannungen
der Kollektor-Basis-Stecke. Der Einsatz als OPV-Eingangsstufe führt u.a. zu einem kleinem
Eingangs- Biasstrom, erhöhter Gleichtaktunterdrückung, hohen Gleichtakteingangswiderständen
und geringer Gleichtakteingangskapazität.
3. Operationsverstärker
71
Ein Operationsverstärker kann durch zu hohe Eingangsspannungen leicht zerstört werden. Deshalb
werden in modernen OPV geeignete Schutzschaltungen mitintegriert. Die im Bild 3.29 gezeigten
Dioden sind praktisch als Transistorstrukturen realisiert.
{ Bei Bipolartransistoren wird die zulässige Differenzeingangsspannung wesentlich durch den
Emitterdurchbruch bestimmt (Verringerung der Stromverstärkung, erhöhter Eingangsstrom).
Die Gleichtakteingangsspannung ist meist auf den Wert der Betriebsspannung begrenzt.
Io
Rs
E
Rs
E2
E1
Io
I1
A1 A2
I2
b) serielle Anordnung
a) antiparallele Dioden
Bild 3.29: Eingangs-Überspannungsschutzschaltungen
3.6.2
Ausgangsstufe
Die Ausgangsstufe eines OPV besteht typisch aus einem Spannungsverstärker mit nachfolgendem
Stromtreiber. Sie soll über einen ausreichenden Pegel (Strom und Spannung) verfügen und die
meist variable Last von der Innenschaltung des OPV isolieren (vgl. auch Spannungsquellen). Als
bipolarer Stromtreiber wird fast immmer ein Komplementär-Emitterfolger eingesetzt (Bild 3.30).
Arbeitswiderstand
D
+ U CC
I
R
A
D
R
E
Spannungsverstärker
- U EE
Stromtreiber
Bild 3.30: Typische Ausgangsstufe von OPV
72
3. Operationsverstärker
Informative Werte für die Spannungsverstärkung und den zulässigen Ausgangsstrom der gezeigten
Ausgangsstufe sind
{ V = 100 ... 1000, Ia < (5 ... 20) mA.
{ Der Ausgangswiderstand ra der Ausgangsstufe ist abhängig von der Aussteuerung (Größe und
Polarität des Ausgangsstromes) und damit nichtlinear.
{ Wichtig für den Betrieb ist auch eine interne Begrenzung des Ausgangskurzschlußstromes
eines OPV (Emitterwiderstände R in Bild 3.30).
Aus dynamischen Gründen wird für schnelle Operationsverstärker (Impulsbetrieb, Komparatoren)
häufig eine zweistufige Realisierung der inneren OPV-Struktur angestrebt. Damit können u.a.
langsame Einschwingvorgänge infolge komplexer Polpaare im Frequenzgang des OPV vermieden
werden.
Bild 3.31 zeigt vereinfacht eine solche zweistufige Lösung mit interner Frequenzgangkompensation
(Kapazität CK , dominierender Pol).
I1
+ U CC
I2
I 2 >> 2 I 1
T1
Ud
+
T6
UA
Ck
T2
T7
T5
T4
T3
-U
EE
Bild 3.31: Zweistufiger OPV mit interner Frequenzgangkorrektur
4. Verstärkerschaltungen mit OPV
4
73
Verstärkerschaltungen mit OPV
Die Verstärkung, insbesondere kleiner Signale im µV- bzw. mA-Bereich, ist die wichtigste Signalverarbeitungsoperation mit analogen Schaltungen im Vergleich zur Digitaltechnik.
Die grundlegenden Verstärker-Schaltungen mit OPV werden nachfolgend dargestellt, sie lassen
sich alle auf die in Abschnitt 3 eingeführten Grundtypen zurückführen:
{ invertierender Verstärker,
{ nichtinvertierender Verstärker,
{ Differenzverstärker.
Im Falle des invertierenden bzw. nichtinvertierenden Verstärkers können sowohl die Spannung als
auch der Strom als Ausgangsgröße genutzt werden können. Damit ergeben sich weitere Varianten
von OPV-Verstärkerschaltungen (Bild 4.1).
{ Bei invertierendem Betrieb ist das wirksame Eingangssignal ein Strom. In diesem Sinne wird
auch von Strom-/Spannungs- bzw. Strom-/Stromwandlern gesprochen. Eine Spannung kann
aber gleichfalls als Eingangssignal verwendet werden. Sie wird über einen Widerstand wegen
des virtuellen Massepotentials am invertierenden OPV-Eingang in einen entsprechenden
Eingangsstrom umgesetzt.
{ Bei nichtinvertierendem Betrieb ist die wirksame Eingangsgröße immer eine Spannung.
+
+
Uo
-
-
R2
Ue
R2
Ue
R1
U
Uo
R1
U
U
I
R2
Ie
R1
-
Ie
+
Ue
R2
Uo
Ie
-
Ie
+
R1
Ue
I
Io
U
Uo
Io
R3
R1
I
I
Bild 4.1: Varianten von OPV-Verstärkerschaltungen
Bei praktischen Realisierungen der angegebenen Prinzipschaltungen werden die in Abschnitt 3
beschriebenen Möglichkeiten zur Reduktion des Einflusses der Eingangsfehlerquellen realer OPV
genutzt (Widerstandssymmetrierung, Offsetabgleich).
74
4. Verstärkerschaltungen mit OPV
4.1
Strom-Spannungswandler und Stromverstärker
Schaltungen mit kleinem (differentiellen) Eingangswiderstand eignen sich gut zur Verstärkung von
Signalen aus hochohmigen (Strom-) Quellen. Da der invertierende Eingang gegengekoppelter
OPV-Schaltungen virtuell Massepotential führt, lassen sich die beiden invertierenden Schaltungen
auch mit Spannungssignalen ansteuern, indem ein Widerstand als U-I-Wandler wirkt. Damit
entsteht aus dem I-U-Wandler in Bild 4.1 die bekannte invertierende OPV-Grundschaltung.
Bei idealem OPV fließt der gesamte Eingangsstrom Ie durch den Gegenkopplungswiderstand R2
bzw. wird durch den Ausgangsstrom kompensiert (Knotensatz). Für die Ausgangsgrößen gilt damit
U o = − R 2 Ie = −
und
Io = − Ie 1 +
R2
U
R1 e
R2
R1
für die I-U-Wandler-Schaltung
für die Stromverstärker-Schaltung.
Wird in der I-I-Wandlerschaltung aus Bild 4.1 die Spannung Uo als Ausgangsgröße verwendet, so
erfolgt auch hier eine I-U-Wandlung. Die Schaltung hat gegenüber der Grundschaltung einen
größeren Übertragungsfaktor:
U o = − I e (R 2 + R 3 +
R2R3
).
R1
Bild 4.2 zeigt die Anwendung am Beispiel der Messung des Fotostromes einer Fotodiode. In beiden
angegebenen Schaltungen fließt der Fotostrom IF über einen Widerstand (R bzw. R2 ) und erzeugt
die Ausgangsspannung Uo . Der entscheidende Unterschied im Verhalten der beiden Schaltungen
liegt in ihrer Dynamik.
{ Die Strommessung mit Hilfe eines I-U-Wandlers ist dynamisch meist günstiger als eine
Spannungsmessung (nach passiver I-U-Wandlung über einen Widerstand), da eine am
Eingang der Schaltung immer wirksame Kapazität C kaum umgeladen werden muß.
+U
+U
D
IF
C
R
IF
+
Vo
-
Uo
R2
C
D
R2
Vo
+
$ l C.R
R2
R IF
R1
R3
R1
R1
Uo = 1 +
Uo
R R
U o = − R2 + R3 + 2 3 IF
R1
C . R2
$l
Vo
Bild 4.2: Verstärkung kleiner Ströme (Fotostrom einer Fotodiode)
4. Verstärkerschaltungen mit OPV
75
CR
Die Zeitkonstante der I-U-Wandlerschaltung $ l V 2 ist offensichtlich wesentlich kleiner als die
o
bei Spannungsmessung. Das ist bedeutsam, da bei kleinen Strömen große Widerstandswerte
benutzt werden müssen, um die geforderte Ausgangsspannung zu erreichen. Außerdem bleibt der
Spannungsabfall über der Fotodiode in der invertierenden Schaltung nahezu unabhängig von der
Größe des Fotostromes (Flußspannung UF ) und der Spannungseinfluß auf die Diodenkennwerte
wird reduziert.
Für sehr kleine Eingangsgleichströme kann eine Strom-Spannungswandlung auch mit Hilfe
dynamischer OPV-Schaltungen (Integrierer, Differenzierer) realisiert werden (Bild 4.3). Für die
Spannungen an den OPV-Ausgängen dieser Schaltung gilt idealisiert:
U1 = −
t1
¶ ( i e − U off1 ) dt = − t 1 ( I e − U off1 ),
R
R
C
1
C1
0
U2 = − C2R1
1
dU 1
C
C R
+ U off2 = 2 R 1 I e − 2 1 U off1 + U off2 .
C1
C1 R
dt
1 nF
C1(10 µF)
Ie
+
R
R2 C2
U1 100 k 1 µF
R
R1
- 100 M
+
U2
z .B. BIFET- OPV TL 080
Bild 4.3: I-U-Wandler für sehr kleine Eingangsgleichströme (Quelle: rfe 1981/2, S. 131)
4.2
Spannungsverstärker und Spannungs-/Strom-Wandler
Diese Schaltungen entsprechen der nichtinvertierenden OPV-Grundschaltung aus Abschnitt 3.2. Da
der Spannungsabfall an R1 identisch ist mit der Spannung am nichtinvertierenden Eingang, gilt für
die Schaltungen in Bild 4.1 bei hinreichend idealem OPV mit Us- = Us+ = Ue :
R
{ Uo = 1 + R2 Ue
1
U
{ Io = R e
1
für den Spannungsverstärker (U-U-Wandler),
für den Ausgangsstrom des U-I-Wandlers.
Kennzeichnend sind weiter folgende Eigenschaften:
{ Der Eingangswiderstand ist gleich dem Gleichtakteingangswiderstand rgl = Re+ des OPV,
typische Werte für bipolare OPV sind Rein > 1 M, bei OPV mit FET-Eingang Rein > 20 M.
{ Der Ausgangswiderstand der Spannungsverstärkerschaltung ist infolge Gegenkopplung sehr
r V&
klein (R aus = a
< 1 , vgl. auch Abschnit 3).
Vo
76
4. Verstärkerschaltungen mit OPV
Ein wichtiger Spezialfall der U-U-Wandler-Schaltung ist der Spannungsfolger (R 1 d ∞ ). Er hat eine
Spannungsverstärkung V = 1 und eignet sich besonders als Pufferverstärker bzw. Impedanzwandler
zur Ankopplung hochohmiger Signalquellen an niederohmige Lasten. Die Ausgangsspannung folgt
dem Eingangssignal mit einer sehr kleinen Pegelverschiebung (Drift- und Offsetspannung):
Uo = Ue + Uoff + U D .
Beim U-I-Wandler kann ein fast beliebiger, auch nichtlinearer Widerstand R2 angeschaltet werden,
U
der Ausgangsstrom stellt sich immer auf den Wert I o = R e ein.
1
Diese Schaltung wird u.a. zur Erzeugung konstanter oder gesteuerter Ströme eingesetzt (Konstantstromquelle bzw. gesteuerte Stromquelle, vgl. Abschnitt 5).
Eine modifizierte Schaltung zur U-I-Wandlung zeigt Bild 4.4. Ein Vorteil der Schaltung ist, daß die
Last RL gegen Masse geschaltet wird. Der Ausgangsstrom IO kann infolge der Transistorstufe (vgl.
Stromquellen mit OPV) bipolar in weiten Grenzen eingestellt werden (1 µA < IO < I Cmax ) und wird
von der Betriebsspannung geliefert, der OPV-Ausgang muß nur den Basisstrom aufbringen. Es gilt:
U 1 = −(U e + U o ),
Io =
U2 − Uo
U + Uo
U
= − 1
= e .
R6
R6
R6
R 5 (100 k)
R2 (100 k)
Ue
R1
100 k
+
R4
U1 100 k
R7
33 k
+
-
R6
Io
+
U2 1 k
Uo
R8
47 k
-
R3
-
100 k
+
Bild 4.4: U-I-Wandler mit einstellbarem Übertragungsfaktor
I o=
RL
Ue
R6
4. Verstärkerschaltungen mit OPV
4.3
77
Instrumentationsverstärker
Viele Sensoren können die Meßgröße nur als kleines elektrisches Strom- bzw. Spannungssignal
abbilden, dem häufig auch noch Gleichtaktstörungen überlagert sind. Diese Gleichtaktstörquellen
treten in Form von Gleichspannungen (Erdströme) und Wechselspannungen mit Netzfrequenz
(einschließlich Oberwellen) auf. Zur Verstärkung kleiner Signale bei gleichzeitiger Unterdrückung
der Störanteile werden spezielle Verstärker verwendet, sogenannte Instrumentationsverstärker oder
auch Isolationsverstärker.
{ Instrumentationsverstärker sind Differenzverstärker mit sehr großem Eingangswiderstand zur
Vermeidung von Belastungsfehlern der Signalquelle und hoher Gleichtaktunterdrückung.
Isolationsverstärker trennen zusätzlich den Eingangskreis galvanisch vom Ausgangskreis.
Instrumentationsverstärker müssen echte Differenzverstärker sein, denn unsymmetrische
Eingangsstufen können Differenzsignale nicht von Gleichtaktsignalen trennen (Bild 4.5 a).
Weitere Anforderungen an Instrumentationsverstärker sind lineare und genaue Verstärkung der
Differenzeingangsspannung, einstellbarer Verstärkungsfaktor über nur einen Widerstand, niedrige
Drift und geringes Rauschen sowie kurze Einschwingzeiten (Multiplexbetrieb).
R1
R2
+
R1
U
D
+
Ue
Ugl
Ue1
R3
+
Uo
Ue1
R2
Ue2
Ue2
+
R4
Uo
Ugl
a) invertierender Verstärker
b) Differenzverstärker
R
U o = − R 2 (U e + U gl )
1
U o = V (U e2 − U e1 ) mit V =
R2 R4
=
R1 R3
Bild 4.5: Zur Auswirkung von Gleichtaktstörungen in OPV-Schaltungen
Bei hinreichend idealen OPV folgen für die Ausgangsspannungen UO die angegebenen Ausdrücke.
Daraus ist deutlich die Gleichtaktunterdrückung des Differenzverstärkers zu erkennen. Bei realen
Verstärkern und hohen Genauigkeitsforderungen kann eine Gleichtaktspannung Ugl aber auch bei
Differenzverstärkern einen beträchtlichen Fehler bewirken.
{ Unvermeidbare Unsymmetrien im technologischen Aufbau der OPV (unterschiedliche
Leerlauf-Verstärkung des invertierenden und nichtinvertierenden Übertragungspfades) führen
zu einer Umsetzung der Gleichtaktspannung Ugl in eine Differenzspannung zwischen den
Eingangsanschlüssen des Verstärkers, die sich dem Nutzsignal überlagert und die Messung
verfälscht.
{ Zusätzlich wirkt Ugl als Gleichtakt-Eingangssignal am Verstärker und ruft so einen Fehler im
Ausgangssignal hervor (Forderung nach hoher Gleichtaktunterdrückung G = CMRR).
78
4. Verstärkerschaltungen mit OPV
Bild 4.6 zeigt die Verhältnisse unter Beachtung der Gleichtakt-Eingangswiderstände Re+ und Resowie des Differenzeingangswiderstandes Rd des Operationsverstärkers. Für den Verstärker wird
dabei die symmetrische Schaltung nach Bild 3.10 angenommen (RG - Verstärkungseinstellung). Die
Signalquelle Ue der angegebenen Schaltung muß gleichstrommäßig mit Signalmasse verbunden
sein, damit der Eingangsruhestrom des Verstärkers fließen kann (R3).
R1
1
-
Ue
3
Ri
R2
R3
UD
Rd RG
2
Re+
5
V
Uo
3
+
I gl
RL
Re-
Ri
4
4
U gl
Bild 4.6: Zur Auswirkung von Gleichtaktstörungen bei realen Differenzverstärkern
Zur Ermittlung der durch die Gleichtakt-Gegentakt-Konversion entstehenden Differenzspannung
kann die Admittanzmatrixgleichung des Eingangskreises der Schaltung verwendet werden. Dazu
wird die Gleichtaktspannungsquelle Ugl in eine äquivalente Stromquelle Igl = yi . Ugl umgewandelt
(Ri - Isolationswiderstand der Signalquelle, Sensor):
yd + y1 + ye−
−yd
−yd
y d + y2 + ye+
−y1
−y2
U 1 = I gl
−y1
−y2
y1 + y 2 + y 3 + yi
y 1 (yd + y2 + ye+ ) + y2 y d
,
N
U 2 = I gl
U1
U2
U3
=
0
0
I gl
.
y 2 (y d + y1 + ye− ) + y1 yd
.
N
Dabei steht N für die Systemdeterminante der Admittanzmatrix Y. Für die durch Gleichtaktgrößen
bewirkte Differenzspannung UDgl = U2 - U1 erhält man
U Dgl = U 2 − U 1 = I gl
y2 ye− − y1 ye+ U gl y 1 y 2
=
N
Ri N
R1
R
− 2 .
R e−
R e+
Aus dieser Gleichung für die Fehlerspannung UDgl und Bild 4.6 lassen sich prinzipielle Lösungen
ableiten, um den Fehler möglichst klein zu halten:
1) Meßfühler möglichst isoliert montieren (R i d ∞).
2) OPV mit hoher Gleichtaktunterdrückung und großen Gleichtakteingangswiderständen einsetzen.
3) Instrumentationsverstärker einsetzen und/oder
R
R
4) abgeglichene Brücke mit R 1 = R e− und OPV mit hoher Gleichtaktunterdrückung realisieren.
2
e+
{ Die besten Ergebnisse werden mit Isolationsverstärkern erzielt (G > 150 dB, Rgl > 10 11 ).
Die galvanische Trennung wird dabei mittels Übertrager oder mit Optokpplern erreicht. Der
Aufwand für diese Isolationsverstärker ist relativ hoch, ebenso ihr Preis.
4. Verstärkerschaltungen mit OPV
79
Eine modifizierte Schaltung mit sehr guten Eigenschaften ist in Bild 4.7 angegeben. Sie entspricht
in ihrer Funktion weitgehend der symmetrischen Schaltung nach Bild 3.10. Zur weiteren Erhöhung
der Gleichtaktunterdrückung wird die Abschirmung der Eingangsleitungen und evtl. der Fußpunkt
der Versorgungsspannungen für die Eingangs-OPV V1 ,V2 mit der Gleichtaktspannung nachgeführt.
Die OPV V1 ,V2 müssen dazu über eine galvanisch getrennte Stromversorgung verfügen.
R1
U e1
2k
Ud
U e2
-
R3
10 k
Ud
+
R2
-
R
R
R
V2
EingangsAbschirmung
Stromversorgung
- für V1, V2
U*
d
10 k
10 k
V4
+
+
V3
UA
F2
R
2k
+
F1
RG
+
2R
V1
2R
SGND
Bild 4.7: Instrumentationsverstärker mit hoher Gleichtaktunterdrückung /4/
Isolationsverstärker
Zur Realisierung extrem hoher Werte der Gleichtaktunterdrückung (G > 120 ... 160 dB) werden
Trenn- bzw. Isolationsverstärker angeboten. Sie realisieren eine galvanische Trennung zwischen
Eingangs- und Ausgangsteil einer Verstärkerschaltung. Grundsätzlich sind zwei Prinzipien bekannt:
Transformatorische Trennverstärker und Trennverstärker mit linearer Optokopplung.
Transformatorische Trennverstärker enthalten einen meist in Dickschichttechnik realisierten Trafo
(Übertrager). Das Signal wird im Inneren der Schaltung moduliert ("zerhackt") und somit als
Wechselsignal übertragen. Hinter dem Transformator wird es taktsynchron demoduliert, gefiltert
und im Ausgangsverstärker gepuffert. Solche transformatorischen Trennverstärker werden mit
Gleichspannungsfestigkeiten (CMV) bis über ! 2 000 VSS angeboten (AD 202/204/290).
Trennverstärker mit linearer Optokopplung arbeiten typisch als Strom-/Spannungswandler und
verwenden eine LED und zwei miteinander verkoppelten Fotodioden, die das Ausgangssignal vom
Eingangssignal galvanisch trennen (Bild 4.8). Die Dioden sind so angeordnet, daß sich das von der
LED emittierte Licht gleichmäßig auf beide Fotodioden verteilt. Haben die Fotodioden gleiche
elektrische und optische Kennwerte (Gleichlauf), so ist auch der generierte Strom in beiden Dioden
gleich. Die Rückkopplung des Eingangsverstärkers V1 (optische Kopplung LED - Fotodiode D1 )
verbessert die Linearität der Schaltung. Die Kopplung zwischen LED und Diode D2 bestimmt die
galvanische Trennung des Ausgangsverstärkers.
Beispiel ISO 100 von Burr Brown:
CMV = 700 V, Trennimpedanz 10 12 ,
G = 100 dB für Wechselspannung (60 Hz),
G = 160 dB für Gleichspannung.
80
4. Verstärkerschaltungen mit OPV
Optogekoppelte Trennverstärker benötigen weniger Chipfläche und können so in einem kleineren
Gehäuse untergebracht werden als transformatorische Trennverstärker.
Us-
Uo
Us+
+
Funktionssymbol
Isolationsbarriere
R
Ie
+
F
-
V1
+
V2
Uo
LED
D1
D2
Bild 4.8: Trennverstärker mit linearer Optokopplung
4.4
OPV-Schaltungen mit kombinierter positiver und negativer Rückkopplung
Schaltungen mit interessanten Eigenschaften erhält man bei gleichzeitiger Anwendung von
negativer und positiver Rückkopplung, d.h. also von Gegenkopplung und Mitkopplung (Bild 4.9).
Dabei wird davon ausgegangen, daß durch eine dominierende Gegenkopplung die Schaltungen
stabil sind.
U1
R1
R2
Stabilitätsbdingung:
-
U2
R3
+
Uo
y y -y y >0
2 3 1 4
R4
Bild 4.9: OPV-Schaltung mit Gegen- und Mitkopplung
R
R
Unter Beachtung der Stabilitätsbedingung y2 y3 - y1 y4 > 0 bzw. R 2 < R 4 sind zwei Extremfälle
1
3
dieser Grundschaltung realisierbar:
1) R 1 d ∞ − Strominverter ,
2) R 3 = 0
− Negativer Widerstand .
Zwei Schaltungsbeispiele zur Erzeugung negativer Widerstände sind in Bild 4.10 gezeigt.
4. Verstärkerschaltungen mit OPV
81
Der Strominverter formt eine Stromquelle in eine Stromsenke und transformiert dabei den Lastwiderstand in einen negativen Widerstand, er wirkt somit als NIC (Negative Impedance Converter):
Ia = −
R2
R2
U−
U+
I ,
,
.
R 4 S R e− = I S = − R L R 4 R e+ = I a = + R L
Für die meisten Anwendungen wird R2 = R4 = R gewählt. Beide Widerstände sind wegen UD = 0
parallelgeschaltet und führen gleiche Ströme (Ia = - IS ). Der Signalstrom IS erzeugt über dem
Lastwiderstand RL eine Spannung Ia RL = - IS RL , die wegen des virtuellen Kurzschlusses der beiden
OPV-Eingänge auf die Signalquelle zurückwirkt.
{ Bezüglich der Signalquelle wirkt der Strominverter wie ein negativer Widerstand Re- = - RL .
Allgemein kann gezeigt werden, daß jede Impedanz Z, die an Stelle des Lastwiderstandes R3 = RL
angeschaltet wird, als entsprechend negative (massebezogene) Impedanz an die Eingangsklemme
des Strominverters transformiert wird (Ze- = - Z). Diese Eigenschaft des Strominverters als NIC
wird u.a. in aktiven Filtern angewendet.
-
Ia
+
R2
R1
R2
IS
Uo
R4
R3 = R L
a) Strominverter
Uo
+
R4
IS
Re+
b) negativer Widerstand
Bild 4.10: OPV-Schaltungen zur Erzeugung negativer Widerstände
Auch im zweiten Extremfall für die Grundschaltung mit R3 = 0 erfolgt eine Transformation in
einen negativen Widerstand (Bild 4.10 b). Die Analyse ergibt folgende Beziehungen:
R
R
R
U
U o = − R 4 (1 + R 1 ) I S , U + = − R 4 R 1 I S , R e+ = + = − R 4 1 .
I
R2
2
2
a
Jeder der drei Widerstände R1 , R2 , R4 kann als Original angesehen werden, welches durch die
beiden anderen Widerstände in den negativen Widerstand Re+ transformiert wird. Die praktische
Bedeutung der beiden Schaltungen liegt u.a. in der Möglichkeit, in der Schaltung vorhandene oder
parasitäre Netzwerkimpedanzen zu neutralisieren. Beispiele dafür sind in den folgenden Bildern
angegeben.
{ Bild 4.11 zeigt eine Schaltung zur Kompensation der Leitungswiderstände und des Grundwiderstandes Ro in einer 3-Leiter-Meßschaltung für Widerstandsthermometer (Pt 100),
{ Bild 4.12 demonstriert die Neutralisierung einer Eingangskapazität,
{ Bild 4.13 zeigt die Anwendung dieser Schaltung zur Realisierung der Howland-Strompumpe
(differenzspannungsgesteuerte Stromquelle).
Die Realisierung eines nichtinvertierenden Integrierers ist in Abschnitt 5.4 angegeben.
82
4. Verstärkerschaltungen mit OPV
RL2
R L1 Ro+ R T
IM
RL3
UM
- U*
R*o
IM
-
- 2 U*
+
R
U
M
RL1+ R o+ RT
R
- (R L2 + R*
o)
UM = IM (RT + Ro + RL1 - RL2 - Ro*),
U* = - IM (RL2 + Ro*)
Bild 4.11: Negativer Widerstand zur Kompensation von Leitungswiderständen
R2
R1
-
R
+
US
Uo = US 1 +
1
R
1 + pC S R 3 − pC N R 3 2
R1
,
Uo
CS
US
CN
CS
R2
R1
R
Uo
U o = U S (1 +
- CS
R2
R
) für C N = C S 1 .
R1
R2
Bild 4.12: Neutralisierung einer Eingangskapazität
R1
R2
-
R3
U1
U2
+
Uo
R
R
IL
4
IL
RL
Us+
UD
RL
-R
R
R
U s+ = RL (U 2 − U 1 ) für R 3 = R = R 1 R 4 ,
2
IL =
U S+
U − U1
= 2
, z. B. R 1 = R 2 = R 3 = R 4 = R .
RL
R
Bild 4.13: Differenzspannungsgesteuerte Stromquelle (Howland-Strompumpe)
4. Verstärkerschaltungen mit OPV
4.5
4.5.1
83
Programmierbare Verstärkerschaltungen
Verstärker mit Widerstandsnetzwerk
In vielen Anwendungen wird gefordert, daß die Verstärkung elektronisch veränderlich ist und durch
das (Geräte-) Rechnerprogramm gesteuert werden kann.
{ Programmierbare Verstärker können mit OPV, Widerstandsnetzwerken und Analogschaltern
bzw. Analog-Multiplexern realisiert werden.
{ Alternativ kann auch ein multiplizierender Digital-Analog-Wandler in die Rückführung des
OPV geschaltet werden. Er ersetzt dann Multiplexer und Widerstandsnetzwerk.
Bild 4.14 zeigt eine Schaltung für dual gestufte Verstärkungseinstellung durch Einsatz eines
R-2R-Netzwerkes. Als Analogschalter werden vorzugsweise CMOS-Schaltungen eingesetzt (z. B.
4-fach Analogschalter CD 4066, 8-auf-1-Analog-Multiplexer/Demultiplexer CD 4051).
AnalogMultiplexer
Adresse
8
4
2
1
Ue
R
+
Uo
a) Prinzipschaltung
R
2R
R
2R
R-2R-Widerstands-Netzwerk
S2
S1
Ue
-
Uo
+
Ue
Uo
+
R
R+R*
b) V = 1
c) V = 2
S4
+
R*
Uo
Io
R
U1
R
I2
I1
Ie
Ue
Io
+
R
U1
U2
R*
2R
d) V = 4
U1
S8
Ue
R
I3
Uo
R
I 2U2 R I 4
e) V = 8
I3
Bild 4.14: Digital programmierbarer Verstärker mit Widerstandsnetzwerk
U3
R*
2R
2R
I1
Ie
I5
84
4. Verstärkerschaltungen mit OPV
Die Verstärkung kann bei den einzelnen Schalterstellungen des Multiplexers aus den angegebenen
Ersatzschaltungen ermittelt werden (Knotengleichungen). Zur vereinfachten Beschreibung der
Wirkungsweise werden folgende allgemeine Eigenschaften des R-2R-Netzwerks einbezogen:
{ Der Ersatzwiderstand R* des Netzwerkes rechts von einem beliebigen Abzweigpunkt nach
Masse ergibt immer den Wert R* = R.
{ Jede Knotenspannung Ui wird von links nach rechts im Netzwerk halbiert.
Schalter S1 geschlossen (Bild 4.14 b):
Es ergibt sich der Spannungsfolger mit V = 1 und einem Lastwiderstand RL = R + R* = 2 R.
Schalter S2 geschlossen (Bild 4.14 c):
Es ergibt sich die U-U-Wandlerschaltung aus Bild 4.1 mit R2 = R1 = R und der Verstärkung V = 2.
Schalter S4 geschlossen (Bild 4.14 d):
Die Spannung U2 wird bei idealem OPV (Vo d ∞, Ie = 0) auf U2 = Ue ausgeregelt. Mit den o.g.
Angaben für das R-2R-Netzwerk gilt weiter U1 = 2 U2 und Uo = 2 U1 = 4 Ue und damit V = 4.
Schalter S8 geschlossen (Bild 4.14 e):
Jetzt wird die Spannung U3 = Ue ausgeregelt und jede Knotenspannung nach links im Netzwerk
jeweils verdoppelt. Damit ergibt sich Uo = 8 Ue und somit eine Verstärkung V = 8.
{ Der Schalterwiderstand RON der CMOS-Analogschalter beträgt typisch 30 ... 1 k und hat
bei hinreichend kleinen Eingangsströmen des OPV keinen Einfluß auf die Verstärkung.
4.5.2
Verstärker in SC-Technik
Die sogenannte SC-Technik (Switched Capacitor) verwendet als grundlegende Schaltungselemente
Analogschalter, Kondensatoren und Verstärker. Sie alle lassen sich in MOS-Technologien gut
herstellen. Hauptanwendungsgebiet der SC-Technik ist die Realisierung aktiver Filter (vgl. auch
Abschnitt 5.4: Integrator). Aber auch Verstärker, Komparatoren und andere Schaltungen bis hin zu
kompletten AD- und DA-Wandlern werden in dieser Technik angeboten.
Die grundsätzliche Wirkungsweise der Schaltungen in SC-Technik beruht auf dem Grundelement
geschaltete Kapazität (Switched Capacitor), die unter bestimmten Bedingungen einen Widerstand
simuliert. Dazu wird die Kapazität C (Bild 4.15 a) in jeder Taktperiode T eines Taktsignales einmal
mit der Eingangsspannung Ue und einmal mit dem Ausgang verbunden. Auf dem Kondensator C
entstehen bei jeder Umschaltung Ladungsänderungen Q = C . (U e − U o ) und es kommt zu einem
Stromfluß vom Eingang zum Ausgang mit einem mittleren Wert von
i=
Q C
= (U e − U o ) = C . f t . (U e − U o ) .
T
T
Vergleicht man diesen Ausdruck mit dem Ohmschen Gesetz, so ergibt sich die Äquivalenz
zwischen einer geschalteten Kapazität und einem ohmschen Widerstand R.
I=
U = U. C. f
t
R äquiv
d R äquiv = T = 1. .
C C ft
1
{ Eine geschaltete Kapazität wirkt wie ein Widerstand Räquiv , solange die Taktfrequenz f t = T
(Abtastrate) viel größer ist als die Frequenz des Eingangssignales Ue .
4. Verstärkerschaltungen mit OPV
85
Wichtig für Anwendungen ist der lineare Zusammenhang zwischen der Taktfrequenz und dem
Ersatzleitwert; er kann somit digital gesteuert werden.
R= T
C
i (T)
ft
Ue
Uo
C
i
Ue
Uo
a) Grundelement und äquivalentes Widerstandselement
Φ1
Φ2
T
Φ1
C
Ue
Φ2
Uo
b) Grundelement mit MOSFET, Ansteuerspannungen als nichtüberlappende Taktfolge
S2
S2
S2
S1
C1
S1
C2
-
+
Ue
C1
S2
Uo
Ue
C2
+
Uo
c) Invertierende Verstärker in SC-Technik
Bild 4.15: Invertierende Verstärker in SC-Technik
In MOS-Technik wird der Schalter durch zwei MOSFET realisiert, die abwechselnd durch einen
Zwei-Phasen-Takt angesteuert werden. Die beiden sich nicht überlappenden Taktphasen werden
häufig mit odd (ungerade) und even (gerade) bezeichnet ( 1 , 2 im Bild 4.15).
Die Übertragungsfunktion (Verstärkung) der beiden Schaltungen in Bild 4.15 c) erhält man wie bei
konventionellen OPV-Schaltungen als Verhältnis der wirksamen Widerstände
1
Uo
ft C2
C
V= U =−
= − 1 .
1
C2
e
ft C1
{ Die Verstärkung wird bei idealem OPV nur vom Verhältnis der Kapazitätswerte bestimmt.
Das Ausgangssignal ist abhängig von der konkreten Schaltungsausführung ggf. nur in einer
Taktphase gültig.
86
4. Verstärkerschaltungen mit OPV
4.6
Schnelle Verstärker für A/D-Umsetzer
Zur Verarbeitung sehr schneller Signale sind konventionelle OPV wegen ihres Hochfrequenz- und
Impulsverhaltens nur begrenzt einsatzfähig. Für viele Anwendungen, z. B. Pufferverstärker für
schnelle Analog-Digital-Umsetzer oder sehr schnelle Sample-and-Hold-Verstärker, bietet sich der
Einsatz moderner Transimpedanz-Verstärker an (vgl. auch Abschnitt 3.5). Sie bieten eine von der
Verstärkung fast unabhängige Bandbreite bis über 200 MHz.
{ Hochgeschwindigkeits-Analog-Digital-Umsetzer (Flash-, Half-Flash-Converter) benötigen
Eingangsverstärker mit hoher Bandbreite und gleichzeitig hohem Impuls-Ausgangsstrom zur
Ansteuerung großer kapazitiver Lasten. Konventionelle OPV bieten eine nutzbare Bandbreite
von bis zu 50 MHz und typisch Ausgangsströme | Iout | < 10 mA.
Bild 4.16 zeigt die Schaltung eines 12-Bit-Half-Flash-Converters (Zweistufen-ADU) mit einem
Transimpedanz-Verstärker AD 846 als Differenzverstärker mit sehr kurzer Einschwingzeit. Die
Schaltung wandelt einen Analogwert Ue in zwei Umsetzungsschritten in einen 12-Bit-Digitalwert
mit einer Umsetzzeit Tu < 1 µs.
{ Dazu wird das Eingangssignal zuerst direkt mit einem 7-Bit-Parallel-ADU verarbeitet und
dessen 7-Bit-Ausgangswort in einen schnellen 7-Bit-DA-Umsetzer (mit 12-Bit Genauigkeit)
geladen. Der Eingangsverstärker (AD 842) bildet die Differenz aus dem Ausgangssignal des
DA-Umsetzers und dem analogen Eingangssignal (Verstärkung -2).
{ Dieses Fehlersignal wird vom schnellen Transimpedanz-Verstärker (AD 846) mit dem Faktor
V = 32 für den zweiten Umsetzungsschritt verstärkt. Der Verstärker schwingt bei dieser
Verstärkung in weniger als 100 ns auf seinen Endwert ! 0,5 LSB ein.
3,2 k
5k
Ue
5 6
+
- 2 ( U e - UDAU )
11
AD 842
R
+15V
7
3
+
6
2 4 5
-15V
Comp
AD 846
V = 32
7 - Bit -
Addierer
Parallel ADU
1,55 k
7 - Bit - Latch
12 - Bit Ergebnis
50
DAU
mit 12-BitGenauigkeit
Bild 4.16: 12-Bit-Half-flash-ADU mit Transimpedanzverstärker (Quelle: Analog Devices)
5. Lineare Rechen- und Regelschaltungen mit OPV
5
87
Lineare Rechen- und Regelschaltungen mit OPV
Aus den o.g. OPV-Schaltungen lassen sich durch Modifikation der Gegenkopplungsnetzwerke mit
frequenzunabhängigen und/oder frequenzabhängigen passiven Bauelementen eine Vielzahl linearer
Rechen- und Regelschaltungen für entsprechende Anwendungen realisieren. Zur Realisierung zeitbzw. frequenzabhängiger Schaltungen werden meist RC-Netzwerke eingesetzt.
In modernen integrierten Schaltungen wird oft auch das Switched-Capacitor-Prinzip verwendet.
Bei der Analyse der einzelnen Schaltungen kann zunächst von idealen OPV ausgegangen werden.
Für viele praktische Fälle reicht dieser Ansatz aus. Abweichungen infolge realer Eigenschaften der
OPV können mit den o.g. Betrachtungen abgeschätzt bzw. mit Analysemethoden ermittelt werden.
Wegen ihrer allgemeinen Bedeutung in der elektronischen Schaltungstechnik werden auch Stromund Spannungsquellen (einschließlich Stabilisierung) in diesem Abschnitt behandelt.
5.1
Addier- und Subtrahierschaltungen
In diese Gruppe der Rechen- und Regelschaltungen können die bereits in Abschnitt 3.2 behandelten
Addierschaltungen eingeordnet werden. Die Kombination der beiden Schaltungen aus Bild 3.9
ergibt einen Mehrfachsubtrahierer, wenn die entsprechenden Bemessungsbedingungen für die
Widerstände eingehalten werden (Bild 5.1).
U1
U2
U'1
U'2
R1
I1
R0
I2
R2
U1
-
R'1
R1
-
Uo
+
R1
R2
Uo
+
qR2
R'0
R'2
Bild 5.1: Mehrfach-Subtrahierer und bipolarer Koeffizientengeber
Mehrfach-Subtrahierer
Die Schaltung erlaubt gleichzeitig die Addition und Subtraktion von mehreren Spannungen. Dabei
ist die Bemessungsbedingung einzuhalten:
n
m
U o = a i U i − a j U j mit a i R i = R o ; a j R j = R o und
i=1
∏
∏
∏
∏
j=1
n
∏
m
a = j=1
a j.
i=1 i
Bipolarer Koeffizientengeber
Mit dem Potentiometer R2 kann das Verhältnis aus Ausgangsspannung Uo und Eingangsspannung
U1 kontinuierlich zwischen -1 und +1 eingestellt werden (Übertragungsfaktor). Es gilt:
U s+ = q . U 1 (Potentiometereinstellung),
.
U o = (2q − 1 ) U 1 mit 0 [ q [ 1 .
U s− =
U1 + Uo
:= U s+ ,
2
88
5. Lineare Rechen- und Regelschaltungen mit OPV
5.2
Konstantspannungsquellen mit OPV
Für viele Anwendungen werden Gleichspannungen benötigt, deren Größe weitgehend unabhängig
gegenüber Parameteränderungen (Bauelementetoleranzen, Betriebsspannungs- und Temperaturänderungen, Alterung) sind, also Konstantspannungsquellen.
Ausgehend von einem festen Referenzwert soll die Ausgangsspannung auf einen geforderten Wert
einstellbar und in bestimmten Größen belastbar sein (Einstellbereich, zulässiger Ausgangsstrom).
Zusätzlich wird oft Kurzschlußfestigkeit des Ausganges gefordert.
Bei geringen Anforderungen an die Stabilität und Ausgangsleistung (PV < 1 W) sind auch einfache
Z-Dioden-Schaltungen geeignet. In den meisten Fällen ist jedoch eine Regelschaltung erforderlich
bzw. sinnvoll. Typische Anwendungsbereiche für Konstantspannungsquellen sind z. B. allgemein
die Meßtechnik, Analog-Digital- und Digital-Analog-Umsetzer.
5.2.1
Prinzip der Spannungsstabilisierung mit Z-Dioden
Die meisten elektronischen Lösungen für Konstantspannungsquellen lassen sich auf die einfache
Z-Dioden-Schaltung in Bild 5.2 zurückführen. Eine Z-Diode, in Sperrichtung gepolt, wird über den
Vorwiderstand R mit Strom versorgt. Ab einem Mindestwert IZmin des Stromes durch die Diode
ändert sich die Spannung UZ bei Stromschwankungen nur noch geringfügig. Für hochstabile Werte
von UZ muß der Strom durch die Diode wegen U Z = r z I Z ebenfalls konstant gehalten werden.
ID
UCC
IZ
- U D UZ
T 1= 25°C
R
IZ
IL
UZ
10 mA
T2 > T1
IZ
TK= 0
2 mA
- UD
UZ
TK= 0
Bild 5.2: Spannungsstabilisierung mit Z-Diode (Prinzip)
Für viele Anwendungen zeigt diese einfache Prinzipschaltung wesentliche Schwächen:
{ Die Ausgangsspannung ist nicht einstellbar, eine brauchbare Stabilisierung ist erst für Werte
der Betriebsspannung UCC > 2 . UZ erreichbar. Schwankungen der Betriebsspannung wirken
sich unmittelbar auf die Referenzspannung aus.
{ Die Ausgangsspannung ist lastabhängig (bei konstanter Last unkritisch).
{ Die Stufung der Z-Spannung praktisch angebotener Z-Dioden ist relativ grob. Für geringen
Temperatureinfluß werden Z-Dioden mit kleinen TK-Werten benötigt (Referenzelemente).
Für Experimentierzwecke kann auch aus preiswerten "einfachen" Z-Dioden eine Referenzspannung
mit sehr gutem Temperaturverhalten (TK < 5 pp mK-1 ) realisiert werden (Bild 5.2, rechts).
{ Durch Messung bei zwei verschiedenen Temperaturen der Z-Diode wird der Z-Strom IZ |TK=0
ermittelt und der Vorwiderstand R entsprechend bemessen.
5. Lineare Rechen- und Regelschaltungen mit OPV
5.2.2
89
Konstantspannungsquellen mit OPV
Nachfolgend sind einige OPV-Schaltungen gezeigt, die unmittelbar das bekannte Stabilisierungsprinzip mit Z-Dioden nutzen (Bild 5.3). Der OPV dient dabei im wesentlichen der Stabilisierung
des Stromes durch die Z-Diode auch bei schwankender Last.
{ Alle gezeigten Schaltungen benötigen für stabile Ausgangsspannungen Uo auch konstante
Eingangsspannungen Ue . Sie können oft mit der einfachen Grundschaltung nach Bild 5.2
realisiert werden, da die OPV-Schaltungen konstante kleine Lasten für diese Schaltungen
darstellen.
UZ
UZ
Ue < 0
R1
I1
IZ
-
I1
Uo
+
Ue > 0
a)
IZ
-
Uo
+
b)
R1
Ue < 0
R1
R2
R2
Rv
+
R1
Uo
Ue > 0
+
Rv
Uo
d)
c)
Bild 5.3: Konstantspannungsquellen mit OPV
Für die Ausgangsspannung der angegebenen Schaltungen gilt
a) U o = U z für U e < 0, I z = I 1 ,
R
b) U o = U z + U e für U e > 0, I z = I 1 ,
c) U o = U z für − R 2 U e > U z ,
1
d) U o = U z für
1+
R2
U > Uz .
R1 e
Die Eingangsspannung Ue kann auch aus der stabilisierten Ausgangsspannung Uo selbst abgeleitet
werden (Bild 5.4 a). Da in der Schaltung gleichzeitig sowohl eine Gegenkopplung als auch eine
Mitkopplung wirken, besitzt sie zwei stabile Zustände. Durch eine Hilfsschaltung (D, R4 , R5 ) muß
beim Einschalten eine positive Eingangsspannung erzwungen werden. Für Uo = UZ + Ue* sperrt die
Diode D und die Hilfsschaltung wird unwirksam.
{ Zur Sicherung der dynamischen Stabilität der Schaltung muß die Gegenkopplung wesentlich
stärker als die Mitkopplung sein, z. B.
kg =
R1
l 1,
R1 + rz
km =
R3
l 0, 5 .
R2 + R3
{ Die Abweichungen der Ausgangsspannung können kleiner als 0,01 % ... 0,001 % werden.
90
5. Lineare Rechen- und Regelschaltungen mit OPV
R1
R1
U
CC
-
U*
e
+
R
2
R
D
U
CC
R2 (5 k)
-
Uo
+
R4
4
R5
R3
U*e
a)
10 k
Uo
R3
b)
R (1 k)
Z
IL
UZ
Bild 5.4: Hochstabile Konstantspannungsquellen mit OPV
Die Schaltung in Bild 5.4 b) besitzt eine ausgezeichnete Betriebsspannungsunterdrückung (RZ , R3 ).
Damit Widerstand R4 möglichst keinen Einfluß auf den Nennwert des Z-Diodenstromes IZ Nenn hat,
wird U0 = UZ gefordert. Wir erhalten aus der Knotengleichung für den invertierenden Eingang des
OPV
R
R
R
R
R
R
U o = U z (1 + 2 + 2 ) − 2 U CC := U z bzw. U z ( 2 + 2 ) − 2 U CC = 0 .
R
R
R
R
R
R
1
U
3
3
1
3
3
U
Mit I z = R CC + R o d 0 (Ansatz zur Kompensation mit U z << U CC ) erhalten wir für die
z
4
Änderung der Ausgangsspannung Uo
U o = − U CC
R2
.
R3
Für die Widerstände gelten folgende Bemessungsbedingungen:
R4 =
Uo − Uz R2
=
R,
Iz + IL
R3 z
R1 =
Uz
R .
U CC − U z 3
{ Eine weitere Verbesserung der Betriebsspannungsunterdrückung kann auf experimentellem
Weg erzielt werden. An den UCC -Anschluß von R3 und RZ wird ein Sinussignal angeschaltet.
Über Variation von R2 und/oder R3 wird der Wert für minimalen UCC -Einfluß ermittelt.
5.2.3
Konstantspannungsquellen mit erhöhtem Ausgangsstrom
Wird als Ausgang der Spannungsquelle unmittelbar der Ausgang des OPV genutzt, so ist die
Belastung der Ausgangsspannung Uo nur bis Iomax des OPV zulässig (typisch ... 10 mA). Höhere
Ausgangsströme ermöglichen OPV-Schaltungen mit zusätzlichen Transistorstufen (bipolar, FET).
Dabei wird die als Emitterfolger oder als Komplementär-Emitterfolger ausgeführte Transistorstufe
in das Gegenkopplungsnetzwerk des OPV einbezogen. Der Ausgang dieser Transistorstufe bildet
dann den Ausgang des "Ersatz-OPV" (Bild 5.5). Die Ausgangsleistung der Schaltung wird durch
die Betriebsspannung und die Transistorstufe bestimmt, solange der OPV-Ausgang den notwendigen Basisstrom liefern kann.
5. Lineare Rechen- und Regelschaltungen mit OPV
R 2 (10 k)
+U
CC
Rv
Ue
+
+
Ue > 0
IL
91
UCC
R1
-
(1 k)
+
Ue
-
RL
D1
D2
Uo
R
RL
Ersatz-OPV
- UCC
R2
+U CC
Ue
+
V
- o
Ix
Ua
Ue
Ia
R1
-
Ua
Vo
+
R2
a) nichtinvertierende Schaltung
±U
CC
Ix
Ia
Rx
IL
I1
R1
I2
Uo
RL
RL
IL
Uo
b) invertierende Schaltung
Bild 5.5: Spannungsquellen mit OPV und erhöhtem Ausgangsstrom, Ersatzschaltungen
Bei großen Werten der Schleifenverstärkung wird der nichtlineare Widerstand der BE-Strecke des
Transistors in Bild 5.5 a) so stark reduziert, daß sein Einfluß vernachlässigt werden kann, wie
nachfolgende Rechnung zeigt (vgl. auch Abschnitt 3).
R
Für hinreichend große Werte der Schleifenverstärkung F S l V o R +1R können auch die Dioden und
Widerstand R in der Schaltung nach Bild 5.5 b) entfallen.
1
2
{ Durch Einbeziehung der Leistungsstufe in die Gegenkopplung erhalten wir einen Verstärker
mit den guten Eingangsdaten des verwendeten OPV bei erhöhter Ausgangsleistung. Oft kann
so der Einsatz von Leistungs-OPV vermieden werden.
{ Die als Leistungs-OPV angebotenen Schaltkreise sind bezgl. der Eingangskenndaten typisch
wesentlich schlechter als Universal-OPV und erfordern einen erhöhten Schaltungsaufwand
(vgl. Bild 5.6).
92
5. Lineare Rechen- und Regelschaltungen mit OPV
Bestimmung der Ausgangsspannung
Der Einfluß der nichtlinearen Transistorkennwerte (UBE , IB und IC ) auf das Übertragungsverhalten
der beiden Schaltungen nach Bild 5.5 wird mit den entsprechenden Knotengleichungen aus den
angegebenen Ersatzschaltungen ermittelt.
Nichtinvertierende Schaltung
In der Ersatzschaltung nach Bild 5.5 a) gelten folgende Relationen zu den Transistorkennwerten:
Ix = IC , Ia = IB , Ia . R2 = UBE , R2 = rBE (Widerstand der Basis-Emitter-Strecke).
Die Analyse liefert:
U
U o ( 1 + 1 ) − a − Ix = 0 ,
R2
R1 R2
Uo =
U a = V o (U e − U o ) = U x + U o
I R
1
( Ue − a 2 )
Vo
1
1+
Vo
{ Die Ausgangsspannung Uo stellt sich fast unabhängig vom Widerstand R2 = rBE auf den Wert
Uo = Ue ein. Der Spannungsabfall UBE wird gegenüber der Eingangsspannung Ue durch die
Leelaufverstärkung Vo des OPV geteilt wirksam.
{ Der OPV-Ausgang bringt nur den kleinen Basistrom auf. Der viel größere Strom Ix = IC wird
über den Transistor aus der Betriebsspannung UCC geliefert. Er erzeugt im wesentlichen die
Ausgangsspannung Uo = I1 R1 der Schaltung, hält sie konstant und bringt zusätzlich den
nötigen Laststrom IL auf. Innerhalb seines Regelbereiches (CE-Strecke) kann der Transistor so
auch bei stark schwankender Last RL (in Bild 5.5 gestrichelt) die Ausgangsspannung gut
stabilisieren.
{ Voraussetzung für die Wirkungsweise ist, daß der OPV nicht übersteuert wird und daß die
Betriebsspannung UCC groß genug ist
Uo + UBE < Ua max , UCC > Uo + UCE min .
Invertierende Schaltung
In der Schaltung nach Bild 5.5 b) erhält man für die Ausgangsspannung Uo mit
I a + I x − I 2 − I L = 0, I 1 + I 2 = 0, U a = −V o . U s− ,
Uo =
−1
R1 + R2
1+
Vo R1
R2
I R
R
U + a x (1 + 1 ) .
R1 e
Vo
R2
{ Auch in der invertierenden Schaltung wird der Spannungsabfall UBE = Ia Rx = IB rBE über der
Basis-Emitter-Strecke des Transistors im Verhältnis zur Eingangsspannung nur durch die
Leerlaufverstärkung Vo geteilt wirksam.
{ Solange der Transistor leitend ist, bleibt die Gegenkopplung über R2 wirksam und die
Spannung Us- am OPV-Eingang wird auf nahezu Null ausgeregelt.
Bei Einsatz eines Komplementär-Emitterfolgers als Ausgangsstufe (vgl. Bild 5.5 b) können in
beiden Schaltungen auch bipolare Ausgangsspannungen und Lastströme erzeugt werden.
5. Lineare Rechen- und Regelschaltungen mit OPV
93
Hinweise zum Einsatz von Leistungs-OPV
Beim Einsatz monolithischer Leistungs-OPV sind wegen ihrer spezifischen Eigenschaften neben
der üblichen funktionellen Beschaltung meist zusätzliche schaltungstechnische Maßnahmen
vorzusehen. Einige grundsätzliche Hinweise ohne Anspruch auf Vollständigkeit werden am
Beispiel des Typs HEF 165 H, V gegeben.
+ U CC
100 µF
100 nF
D1
CK
1 +
2 -
Ue
220 nF
100 µF
R3
Uo
4
100 nF
C3
D2
1
RL
- UCC
R1
R2
Boucherot-Glied
R
Bild 5.6: Nichtinvertierende Grundschaltung mit Leistungs-OPV [U o = (1 + R 2 ) U e ]
1
Typische schaltungstechnische Maßnahmen:
{ Der Ausgang ist meist nicht kurzschlußsicher. Das ist bei Messungen und beim Anschluß der
Lastschaltung im Betrieb zu beachten. Zusätzlich sollte der Ausgang gegen induktive
Spannungsspitzen mit schnellen Dioden (D1 , D2 ) geschützt werden.
{ Eine sorgfältige Leitungsführung bestimmt wesentlich die Ausgangskennwerte (Trennung
von Signal- und Leistungsmasse, sternförmige Verbindung am Netzteil).
{ Grundsätzlich sollten die Betriebsspannungen durch Stützkondensatoren nahe am Schaltkreis
abgeblockt werden.
{ Zur Vermeidung eines Durchbruchs der Ausgangsstufen-Transistoren ist ein sogenanntes
Boucherot-Glied möglichst dicht am Schaltkreisausgang anzuschließen (unbedingt vor einem
evtl. vorhandenen Koppelkondensator CK ).
R
Zur Unterdrückung der Schwingneigung ist bei kleinen Verstärkungen (1 + R 2 ) < 3, 15 (10 dB ) am
1
invertierenden Eingang ein zusätzliches Korrektur-Glied (R3 C3 ) anzuschalten. Für die Bemessung
wird angegeben /4/:
R3 =
R1R2
, R 3 C 3 = 1, 5 ms .
2R 2 − R 1
94
5. Lineare Rechen- und Regelschaltungen mit OPV
5.2.4
Spannungsstabilisierung mit Regelschaltungen
Für hohe Anforderungen an Konstanz, Genauigkeit und Ausgangsleistung werden geregelte
Stabilisierungsschaltungen verwendet, die meist nach dem Prinzip der Rückwärtsregelung arbeiten:
{ Aus der Differenz zwischen Ist- und Sollwert (Referenzspannung) wird eine Stellgröße
gewonnen, die ihrerseits ein Stellglied beeinflußt (z. B. Leistungstransistor).
Sollen Eingangsspannungen stabilisiert werden, deren Wert über den üblichen Ausgangsgrößen von
OPV (! 15 V) liegen, so kann das Prinzip von Leistungs-OPV grundsätzlich angewendet werden.
Bedingt durch die hohe Verstärkung des OPV erreicht man typisch eine bessere Stabilisierung als
mit diskreten Transistorschaltungen. Für kleine Änderungen von Strom und Spannung (hier von
Interesse) erhält man für die OPV-Schaltung in Bild 5.7 Stabilisierungsfaktoren S > 103 ... 105 .
{ Schnelle Änderungen der Eingangsspannung (auch Netzbrummen) werden weniger gut
unterdrückt, da die Leerlaufverstärkung mit steigender Frequenz abnimmt.
+ UCC
Rv
+ UCC
Uo
Rv
R2
+
+
-
-
Uo
UZ
+
UZ
R
2
R1
R2
U o = ( 1+ R ) U Z
1
R1
Bild 5.7: Regelschaltung zur Spannungsstabilisierung (Schaltung umgezeichnet)
Eine Analyse der Ersatzschaltung mittels Admittanzmatrixgleichung liefert den Wert für den
Stabilisierungsfaktor mit den Näherungen R2 , RV >> rBE (vgl. AM-Gl. bzw. NM-Graph in Bild 5.8).
Die zur Vereinfachung der Rechnung und Interpretation des Ergebnisses eingeführten Näherungen
sind der Ersatzschaltung, dem Signalflußgraphen bzw. der Matrixgleichung zu entnehmen.
y21
Insbesondere gilt y11 = b . Aus der bestimmten Admittanzmatrixgleichung
y11 + y22 + y21
0
−yv
yv + y z
0
−y2
0
−F o
0
−(y11 + y21 )
0
0
y 1 + y2
0
+F o
1
Uo
U1
U2
U3
=
y22 U CC
0
0
0
folgt für die Änderung der Ausgangsspannung infolge Änderung der Eingangsspannung
U o = 1 U CC mit
S
S=
R1
U CC
r
rz
= 1 + (1 + b) r CE
1 + Fo
−
BE
R
+
R
R
U o
1
2
v + rz
.
5. Lineare Rechen- und Regelschaltungen mit OPV
y21 UBE
Rv
1
+
rz
-
Ua R
2
R
Ua = F U
o D
U
CC
UCC
r BE
yv
+Fo
1
yv+ yz
r CE
3 1+ ß
1
-Fo
2
y1+ y2
2
1
95
0
y
22
y11
y
1+ß + 22
y11
y2
Bild 5.8: Ersatzschaltung und Signalflußgraph der Stabilisierungsschaltung in Bild 5.7
Industrielles Beispiel zur Spannungsstabilisierung
Eine einfache Möglichkeit zur Realisierung einer Spannungsstabilisierung mittels Längsregler
bieten z. B. die integrierten einstellbaren Spannungsregler 3170/71 für positive und 3370/71 für
negative Ausgangsspannungen. Zusätzliche interne Schutzschaltungen verhindern eine Zerstörung
des Schaltkreises wegen Übertemperatur oder Kurzschluß. Für die Ausgangsspannung UO der
Schaltung gilt
Uo = 1 +
R1
U Ref + R 2 I adj mit U Ref l 1, 25 V und I adj l +100 A .
R2
3
UE
Leistungsbegrenzung
Überstromschutz
Temperaturschutz
UE
3 LM 317
+
Stromversorgung
+
Referenz
3170/71
1
100 µF
2
1
2
Uref
I adj
Uo
R1
R2
+
10 µF
Uo
I adj
Anwenderschaltung
Bild 5.9: Integrierter Spannungsregler 3170/71 mit Anwenderschaltung
Einige Kennwerte der Schaltkreise:
4,25 ... 41,3 (61,3) V,
Eingangsspannungsbereich: UE
Ausgangsspannung
UO
1,2 ... 37 (57) V,
10 mA ... 1,5 A,
Ausgangsstrom
IO
Schwankung von
U0
U O [ 30 mV im gesamten zulässigen Lastbereich von IO .
96
5. Lineare Rechen- und Regelschaltungen mit OPV
5.2.5
Symmetrierung erdfreier Spannungen
Bei batteriebetriebenen Geräten tritt häufig das Problem der Symmetrierung einer Spannung auf
(Erzeugung von zwei erdsymmetrischen Spannungen). Grundsätzlich kann dazu ein Spannungsteiler eingesetzt werden, dessen Abgriff an Masse geschaltet wird (Bild 5.10).
{ Die Stabilisierung ist um so besser, je niederohmiger der Teiler ausgelegt wird. Nachteilig
sind die damit verbundenen hohen Stromwerte (Verlustleistung, Batteriekapazität).
Meist ist es notwendig, die Summenspannung 2U = U1 + U2 zu stabilisieren (Regelschaltung). Dazu
wird der Spannungsteiler vorteilhaft durch eine OPV-Schaltung ersetzt. Bei kleinen Ausgangsströmen kann die Ausgangsstufe des OPV genutzt werden, bei höherem Strombedarf empfiehlt sich
eine Leistungsstufe (vgl. Abschnitt 5.2.3). Der OPV regelt die Transistorstufe stets so, daß der
Tranistor auf der weniger belasteten Seite weiter aufgesteuert wird.
{ Sinkt z. B. die positive Spannung infolge Belastung ab, so wird die Vergleichsspannung Us+
am Teiler-Abgriff kleiner. Die OPV-Ausgangsspannung sinkt infolge der Verstärkung noch
stärker ab und der obere Transistor T1 wird weniger, der untere Transistor T2 weiter aufgesteuert. Diese Gegenkopplung sorgt für stabile und symmetrische Spannungen, wenn die
Summenspannung 2U konstant ist. Im stationären Fall stellt sich der Strom durch die
Transistoren so ein, daß eine gleich große Belastung beider Ausgangsspannungen erfolgt.
R1
R
U1
+
0
2U
R2
2U
R
- U cc
+ Ucc
T1
+
R
+U
0
- Ucc
T2
-U
Bild 5.10: Prinzipschaltungen zur Symmetrierung erdfreier Spannungen
+U
0
-
U2
R
2U
+ Ucc
-U
5. Lineare Rechen- und Regelschaltungen mit OPV
5.3
97
Konstantstromquellen mit OPV
Für verschiedene Aufgaben werden Schaltungen als Konstantstromquellen benötigt, die unabhängig
von einer angeschalteten Last einen konstanten Strom liefern.
{ Charakteristisch für diese Schaltungen ist ihr hoher Innenwiderstand am Ausgangsknoten und
ihr stabiles Verhalten gegen die unterschiedlichen Parameter- und Umgebungseinflüsse.
Bei geringen Anforderungen kann sowohl die invertierende als auch die nichtinvertierende OPVGrundschaltung als Stromquelle betrieben werden, indem bei konstanter Eingangsspannung Ue der
Strom durch den Rückkopplungswiderstand R2 als Ausgangsstrom aufgefaßt wird. Es gilt ohne
Beachtung der Stromrichtung für beide Schaltungen:
I L = I R2 =
Ue
.
R1
{ Nachteilig an diesen einfachen Grundschaltungen ist, daß eine schwimmende bzw. erdfreie
Last R2 gefordert wird und der ggf. geringe Ausgangsstrom des OPV. Größere Lastströme IL
können bei Anwendung der Schaltungen nach Bild 5.11 erzeugt werden.
+U
IL
RL
Ue
UD
+
Uo
-
I
I
L
Ue
+
Uo
-
B
I1
a)
U1
R1
b)
U1
R1
Bild 5.11: Konstantstromquellen mit OPV
Die Analogie zur Konstantspannungsquelle nach Bild 5.5 ist offensichtlich. In Schaltung 5.11 a)
gilt bei idealem OPV
U
I R1 = R 1 = I C + I B ,
1
IL = IC = IE − IB .
Bei endlicher Leerlaufverstärkung des OPV gilt mit Uo = Fo UD = UBE + U1
U1 =
1 (F U − U ) und damit
BE
1 + Fo o e
IL = IC =
U
U1
U + U1
− I B = e − BE
− IB .
R1
R1
R1Fo
{ Stört der Fehleranteil des Basisstromes IB , so kann ein FET eingesetzt werden (IG = 0). Steht
kein FET mit hinreichend großem Drainstrom ID zur Verfügung, kann die Aufgabe mit einer
Transistorkombination nach Bild 5.11 b) gelöst werden.
98
5. Lineare Rechen- und Regelschaltungen mit OPV
Stromspiegelschaltungen
Der Nachteil der schwimmenden Last kann mit einer Stromspiegelschaltung nach Bild 5.12
aufgehoben werden. Sie besteht aus der Reihenschaltung von zwei zueinander komplementären
Schaltungen der Stromquelle nach Bild 5.11 a). Beide Teilschaltungen können auch mit FET bzw.
Transistorkombinationen nach Bild 5.11 b) realisiert werden.
{ Der Ausgangsstrom IL fließt wegen der Stromspiegelung über die Last nach Masse. Sein
Wert ist über die Widerstandsverhältnisse einstellbar.
U CC
R3
R2
U Ref
+
I1
-
U1
+
U2 = U1
T2
IL
T1
-
U
Ref
R1
R
L
Bild 5.12: Stromspiegelschaltung mit OPV als Konstantstromquelle
Der Laststrom läßt sich einfach bestimmen:
I 1 = I C1 =
U Ref
− I B1 ,
R1
I L = I C2 =
U CC − U 2
− I B2
R3
, U 1 = U CC − I 1 R 2 , U 2 = U 1 ,
=
U Ref R 2
R
− 2 I B1 − I B2 .
R 1 R3
R3
{ In der Bestimmungsgleichung für den Laststrom IL ist die Betriebsspannung nicht enthalten,
d.h. sie beeinflußt den Konstantstrom nicht (gute Betriebsspannungsunterdrückung).
{ Die Referenzquelle URef wird durch den hochohmigen OPV-Eingang kaum belastet.
{ Das Schaltungsprinzip ist erweiterbar auf bipolare Stromquellen.
Bild 5.13 zeigt eine weitere hochstabile und steuerbare Stromquellenschaltung. Dabei gilt
R
R
U1 = UCC - I1 R3 d I a1 = I 1 R 3 , U2 = I2 R4 - UCC d I a2 = I 2 R 4 ,
1
2
IL = Ia1 - Ia2 .
R
R
Für die zwei Schaltungsvarianten in Bild 5.13 erhält man bei einer Bemessung R 3 = R 4
1
2
U R
R
a) I L = Re R 3 und b) I L = I B R 3 .
1
1
{ Die Bemessung der Schaltungen muß so vorgenommen werden, daß die Transistoren nicht in
die Sättigung gesteuert werden, z. B. | I1 - I2 | . (R +RL ) < |UCC | für R1 = R2 = R3 = R4 .
5. Lineare Rechen- und Regelschaltungen mit OPV
99
UCC
R3
Ue
+
-
-
I1
U1
Io
I2
R
a)
U2
IE
IB
I1
I2
+
I a1
IL
I a2
+
RL
R4
IC
b)
R1
R2
- U CC
Bild 5.13: Hochstabile steuerbare Stromquelle mit OPV
Mehrfach-Konstantstromquellen
Programmierbare Mehrfach-Konstantstromquellen, z. B. zum Einsatz in AD- und DA-Umsetzern,
verwenden typisch sogenannte Strombänke (Bild 5.14). Die unterschiedlichen Stromgewichte
ergeben sich aus dem Grundstrom I0 und einem Widerstandsverhältnis.
Dabei wird vorausgesetzt, daß die Transistorkennwerte hinreichend gut übereinstimmen. Das kann
in integrierten Technologien realisiert werden. Ist die BE-Spannung aller Transistoren gleich, so gilt
in
Schaltung 5.14 a)
I E0 =
und
Ii =
bzw.
Schaltung 5.14 b)
U 1 U o − U BE0
=
R0
R0
U Ei R 0
=
I
Ri
R i E0
I0 =
U
U 1 U E0
=
− I B0 l E0
R
R0
R0
Ii =
R
U Ei
= I0 0 .
Ri
Ri
{ Die Teilströme Ii sind relativ zum Grundstrom Io über ein Widerstandsverhältnis gewichtet.
I1
I2
+
U1
-
a)
+
U1
U0
R0
I0
R
I
1
I2
-
I E0
R1
R2
b)
Bild 5.14: Programmierbare Mehrfachstromquellen
R0
R1
R2
100
5.4
5. Lineare Rechen- und Regelschaltungen mit OPV
Integrator
Der Integrator ist die wohl wichtigste zeit- bzw. frequenzabhängige Rechen- und Regelschaltung.
Er wird u.a. zur Erzeugung zeitlinearer variabler Spannungen eingesetzt, z.B. in Reglerbausteinen,
Sägezahngeneratoren, Zeitgebern, AD-Wandlern, U/f-Wandlern (vgl. auch Abschnitt 7).
{ Der praktische Einsatz von Integratoren bringt einige Besonderheiten im Vergleich zu den
zeitunabhängigen Verstärkerschaltungen mit sich, auf die nachfolgend hingewiesen wird.
5.4.1
Integrator-Grundschaltungen
Eine nahezu ideale Integration eines Stromsignals mit passivem Netzwerk erhält man, wenn durch
eine Stromquelle Ie der Integrationskondensator aufgeladen wird (Bild 5.15). Ein Spannungssignal
Ue kann integriert werden, wenn die bekannteste Integrator-Schaltung mit OPV, der invertierende
Miller-Integrator, verwendet wird (Bild 5.15). Dabei erfolgt eine passive U-I-Wandlung über den
Widerstand R (vgl. invertierender Verstärker). Die Ausgangsspannung UO des Integrators ermittelt
man z.B. direkt aus dem Knotensatz für den Knoten s- bzw. aus der Admittanzmatrixgleichung.
{ Bei einem idealen OPV ist die Ausgangsspannung U0 gleich dem zeitlichen Integral der
Eingangsspannung Ue bzw. des Eingangsstromes I e = Ue
:
R
Knotengleichung s-
Ausgangsspannung
t
U O (t) = − 1 ¶ U e dt + U O (0).
RC 0
Ue
dU e
+C
=0
R
dt
{ Bei konstanter Eingangsspannung (-strom) steigt bzw. fällt die Ausgangsspannung UO zeitlinear. Darauf beruht die Anwendung in Sägezahngeneratoren, Zeitgebern u.a.
{ Wird die Eingangsspannung Ue plötzlich Null, so speichert der Integrationskondensator C
den aktuellen Wert UC der Kondensatorspannung (bei idealem OPV gilt Us- = 0, Ie- = 0).
Ie
Ue , I e
C
Uo
t
Umax
C
Ie
Ue
R
Uo
t
+
Uo
- Umax
Bild 5.15: Zeitverhalten des idealen Integrators (Miller-Integrator)
Übersteuerung
5. Lineare Rechen- und Regelschaltungen mit OPV
101
Ist Ue eine Wechselspannung, so folgt mit U e = Û e sin *t für die Ausgangsspannung
t
U O = − 1 ¶ Û e sin *t
RC 0
=
Û e
cos *t .
*CR
{ Die Amplitude von UO ist also umgekehrt proportional zur Kreisfrequenz * = 2f .
Û O
= 1 = f (*) doppeltlogarithmisch auf (Bode-Diagramm), so
*RC
Û e
Trägt man den Frequenzgang
erhalten wir eine Gerade mit der Steigung - 20 dB/Dekade bzw. - 6 dB/Oktave (Bild 5.20). Daraus
ergibt sich ein einfaches Kriterium dafür, ob sich eine Schaltung als Integrator verhält:
{ Eine Schaltung ist genau in dem Frequenzbereich ein Integrator, in dem die AmplitudenFrequenzgangkurve mit 20 dB/Dekade (6 dB/Oktave ) absinkt.
Integrator als lineare Rechenschaltung
Als Rechenschaltung ist ein Integrator praktisch erst dann wirklich brauchbar, wenn man den
Anfangswert UO(t = 0) unabhängig von der Signalspannung Ue vorgeben kann bzw. wenn man den
Integrator zurücksetzen kann. Es werden drei Betriebsarten des Integrators unterschieden:
1) Rücksetzen, Setzen der Anfangsbedingung:
U &O (p)
=−
R0
1
U
R 2 1 + pCR 0 2
R
UO (t)|td∞ = − R 0 U 2 := U O (0)
2
U O (t)
2) Integrieren
U O (t H ) = U O (0) −
3) Halten ( analoges Speichern )
= U O (0) −
1 ¶t U dt
R1C 0 1
t
1 ¶H U dt mit U := 0 .
1
R1C 0 1
{ Für idealen OPV und ideale Kapazität C bleibt die Spannung UC am Kondensator beliebig
lange konstant. Wegen realer Kennwerte (Ie- , ILeck ) entlädt sich C, d.h. die Haltezeit tH ist
praktisch begrenzt.
R
R0
2
R1
S2
S1
U2
U1
C
+
Uo
Bild 5.16: Integrator als Rechenschaltung (Prinzip)
Aus der Grundschaltung lassen sich analog zu den Verstärkerschaltungen verschiedene
Modifikationen eines Integrators ableiten (Bild 5.17).
102
5. Lineare Rechen- und Regelschaltungen mit OPV
R1
U1
U2
Un
R2
:
:
Rn
U1
U2
+
Uo
b) Differenzintegrator
R
+
Ue
+
C2
a) Summationsintegrator
R
-
R2
Uo
R
C1
R1
C
Uo
R
R
C R =-R
e+
Uo
Ue
C
-R
c) nichtinvertierender Integrator
Bild 5.17: Varianten von Integratorschaltungen
Summationsintegrator
Die einfache Integrator-Grundschaltung läßt sich zu einem Summationsintegrator erweitern
(Spannung Us- = 0 !). Für die Ausgangsspannung der Schaltung nach Bild 5.17 a) ergibt sich
t
t
U
U
U
U O = − 1 ¶ I S dt = − 1 ¶( 1 + 2 + ... + n ) dt .
Rn
C0
C 0 R1 R2
Differenzintegrator
Die Integration einer Differenzspannung gelingt mit der Schaltung nach Bild 5.17 b) , wenn die
entsprechende Bemessungsbedingung für die RC-Kombinationen eingehalten wird
t
U o (t ) = 1 ¶(U 2 − U 1 )dt für R 1 C 1 = R 2 C 2 = RC .
RC 0
{ Für U1 = 0 realisiert diese Schaltung auch einen nichtinvertierenden Integrator. Allerdings
werden zwei gleiche Kondensatoren benötigt.
{ Eine Schaltung mit nur einem Kondensator läßt sich mit einem NIC realisieren (Bild 5.17 c,
vgl. auch Abschnitt 4.4). Für die Ausgangsspannung gilt hier:
t
U
U o (t ) = 2 . U o (0 ) + 2 ¶ U e dt = 2 . U o (0) + 2 e t .
RC
RC 0
5. Lineare Rechen- und Regelschaltungen mit OPV
5.4.2
103
Einfluß realer OPV-Kennwerte bei Integratoren
Beim Einsatz realer OPV in Integratorschaltungen sind sowohl die Eingangsruheströme (Ie+ , Ie- ) als
auch die Offsetspannung (Uoff = Us+ - Us- ) sowie deren Drift als Störgrößen zu beachten, weil sich
ihre Wirkung zeitlich summiert. Auch die endliche Verstärkung V0 und deren Bandbreite bewirken
beim Integrator Abweichungen vom idealen Verhalten.
{ Dagegen kann der Einfluß des endlichen Ausgangswiderstandes meist vernachlässigt werden.
5.4.2.1 Endliche Verstärkung, Offsetspannung und Eingangsruheströme
Ausgangspunkt der nachfolgenden Betrachtungen ist das Ersatzschaltbild des Integrators mit realem
OPV in Bild 5.18. Dabei wurden der Ausgangswiderstand ra und die eingangsseitigen Widerstände
rD , Re- , Re+ vernachlässigt. Für die gesteuerte Ausgangsquelle Ua gilt U a = F o (U s+ − U s− + U off ) . Für
r a = 0 bzw. y a d ∞ gilt U o = U a .
C
R1
I1
U
ss+
R2
1
I e-
s'Uoff
Ie+ s'+
ra
Ua
Uo
Bild 5.18: OPV-Ersatzschaltung zur Berechnung der Fehlereinflüsse bei Integratoren
Die Analyse des Netzwerkes ergibt für die Ausgangsspannung UO (vgl. Bild 5.18):
y1 + pC 0 −pC
0
0
y2
+F o −F o 1
Uo =
U s−
U s+
Uo
=
y1 U 1
0
0
+
I e−
I e+
0
0
0
F o U off
,
−1
[U 1 + R 1 I e− − U off − R 2 I e+ − pCR 1 (R 2 I e+ + U off )]
1
1
(1+
)
pCR 1 1 +
Fo
pCR 1
Bei Stromeinspeisung I1 (R 1 d ∞) gilt einfacher:
Uo =
+
−1
[I 1 + I e− − pCR 2 I e+ − pC U off ] .
pC (1 + 1 )
Fo
.
104
5. Lineare Rechen- und Regelschaltungen mit OPV
d , 1 = ¶ dt die Zeitgleichung
Für den Fall der Stromeinspeisung folgt mit der Substitution p = dt
p
U O (t ) = −
1
1+ 1
Fo
1 ¶t (I + I )dt − (R I + U ) .
2 e+
off
C 0 1 e−
Für den zeitlichen Anstieg und den Anfangswert der Ausgangsspannung Uo erhält man daraus
dU O
I 1 + I e−
= −
dt
C(1 + 1 )
F0
U O (0) =
U off + R 2 I e+
.
1+ 1
F0
{ Bei Stromeinspeisung bewirken Ie+ und Uoff einen statischen Fehler (Offset), der ggf.
schaltungstechnisch kompensiert werden kann (vgl. Abschnitt 3.3).
{ Der Eingangsruhestrom Ie- wird in gleicher Weise wie der Signalstrom integriert, er läßt sich
nicht unterdrücken. Soll er keinen unzulässigen Fehler hervorrufen, so muß I e− << I 1 bleiben.
Dazu werden typisch OPV mit FET-Eingangsstufen, z.B. BiFET-OPV 08xx verwendet.
Für den Fall der Spannungseinspeisung arbeitet die Schaltung als Verzögerungsglied 1. Ordnung
mit der Verstärkung -F0 :
UO =
−F 0 [U 1 − U off − R 2 I e+ + R 1 I e− ]
1 + pCR 1 (1 + F 0 )
pCR 1 F 0 (U off + R 2 I e+ )
1 + pCR 1 (1 + F 0 )
+
.
{ Der zweite Summand ist nahezu konstant und entspricht dem Anfangswert UO (t = 0)
! U O (p d ∞) := U O (t = 0) =
U off + R 2 I e+
1+ 1
F0
.
Erst bei Frequenzen 2 f > CR (11 + F ) wirkt die Schaltung als Integrator (vgl. auch Bild 5.20).
1
0
{ Im Gegensatz zur Stromeinspeisung führen bei Spannungseinspeisung der Ruhestrom Ie+ und
auch die Offsetspannung zu einem zeitabhängigen Fehler. Dieser Fehler kann durch Variation
von R 2 l R 1 bedingt kompensiert werden, entsprechend U off + I e+ R 2 − I e− R 1 = 0 .
{ Nicht zu kompensieren ist die Drift dieser OPV-Kennwerte!
d folgt die Differentialgleichung
Mit der Substitution p = dt
U O + CR 1 (1 + F 0 )
dU O
dt
= −F 0 U &1 mit U &1 = U 1 − R 2 I e+ − U off + R 1 I e− .
Sie hat im Zeitbereich die Lösung
t
t
U O (t) = − F 0 U &1 (1 − e − $ ) + U O (0) e − $
mit $ = CR 1 (1 + F 0 ) und U O (0) =
Der Anstieg der Ausgangsspannung beträgt
dU O
=
dt
UO
)
F0
=−
CR 1 (1 + F 0 )
−F 0 (U &1 +
UO
F0
.
CR 1 (1 + 1 )
F0
U &1 +
U off + R 2 I e+
.
1+ 1
F0
5. Lineare Rechen- und Regelschaltungen mit OPV
105
Damit der Integrator dem Idealverhalten möglichst nahekommt, muß F0 möglichst groß sein und die
Fehlergrößen in U1* müssen klein sein
U &1 = U 1 + R 1 I e− − R 2 I e+ − U off l U 1 , also R 1 I e− − R 2 I e+ − U off = 0 .
{ Das ist der gleiche Ausdruck wie bei Verstärkerschaltungen, entsprechend können auch die
gleichen Kompensationsmaßnahmen getroffen werden (z. B. Widerstandssymmetrierung).
5.4.2.2 Dynamischer Fehler bei endlicher Verstärkung und Bandbreite des OPV
Der Amplitudenfrequenzgang eines OPV kann in guter Näherung als Verzögerungsglied 1.
V0
Ordnung beschrieben werden: F 0 (p) = 1 + pT
. Damit folgt für die Übertragungsfunktion F(p) des
0
Integrators
F(p) =
U O (p)
= − 1
U 1 (p)
pCR 1
= −
1
pCR 1
= −
1
pCR 1
1
1+ 1
K0F0
= −
1
pCR 1
1
1 + pCR 1
1+
pCR 1 F 0
1
1 + pCR 1
(1 + pT 0 )
pCR 1
1 + V1
0
1
1+
pCR 1 V 0
1
.
pCR 1
T0
1
1 + pT 0
+V +
1 + pCR 1 V 0
CR 1 V 0
0
Für T0 << R1C und V0 >> 1 folgt einfacher
F(p) =
−1
pCR 1
e ideal
1
1
1+
pCR 1 V 0
endliche
Verstärkung
pCR 1
1 + pT 0
1 + pCR 1 V 0
.
endliche
Bandbreite
Die Übertragungsfunktion des Integrators setzt sich danach aus drei Faktoren zusammen.
U
{ Bei idealem OPV (V o d ∞, T 0 = 0) gilt U O (p) = − pCR1 .
1
Beim Einsatz realer OPV in Integratoren treten hauptsächlich zwei Anteile eines Fehlers auf:
{ Die endliche Leerlaufverstärkung V0 führt zu einem statischen Linearitätsfehler, der mit der
Integrationszeit ansteigt (Bild 5.19 b). Der Integrator arbeitet dann als Verzögerungsglied.
Dieser Effekt tritt bei Stromeinspeisung nicht auf.
{ Die endliche Bandbreite des OPV bewirkt einen dynamischen Fehleranteil, der zu einem
Fehler in der Ausgangsspannung zu Beginn der Integration führt (Bild 5.19 a). Dieser Effekt
kann durch eine Totzeit bzw. Verzögerungszeit td beschrieben werden
Totzeit :
tD l T1 =
T0
Vo
also
U O (t) = −
T
U1
t− 0 .
Vo
R1C
106
5. Lineare Rechen- und Regelschaltungen mit OPV
- Uo
- Uo
U
1
ideal
Vo
To
2
CR1Vo
U1
ideal
real
real
To
CR1 Vo
t
To
t
T
2 o
Vo
Vo
CR1 Vo
a) für kleine Zeiten
b) für große Zeiten
Bild 5.19: Übergangsfunktion eines Integrators
Aus den angegebenen Beziehungen erkennt man, daß sich der Integrator nur dann annähernd ideal
verhält, wenn diese beiden Fehleranteile hinreichend klein sind. Das ist nur in einem beschränkten
Frequenzbereich der Fall (ωCR1Vo >> 1, ωT1 << 1).
1
<< f << f 1 (bzw. f S ) .
2CR 1 V o
Bild 5.20 zeigt den Amplitudenfrequenzgang eines Integrators. Aus ihm lassen sich die oben
beschriebenen Zusammenhänge im Frequenzbereich ablesen.
|F|
dB
ideal (20 dB/Dekade)
Vo
| Fo =
Vo
|
1+ pTo
| F (p) |
1
Vo R1 C
1 = 1
Vo T1
To
Bild 5.20: Amplitudenfrequenzgang eines Integrators
1
T1
1
R1 C
lg f
5. Lineare Rechen- und Regelschaltungen mit OPV
5.4.3
107
SC-Integrator
Ein geschalteter Kondensator (Grundelement der SC-Technik, vgl. auch Abschnitt 4.5) kann den
ohmschen Widerstand in dynamischen RC-OPV-Schaltungen ersetzen. Für ein Verzögerungsglied
bzw. Tiefpaß-SC-Filter 1. Ordnung nach Bild 5.21 a) gilt dann für die Zeitkonstante unter der
Voraussetzung genügend hoher Abtastrate ft
$ = C . R äquiv =
C2
C
T = 2 . 1 mit R äquiv = 1. .
C1
C1 ft
C ft
Dieser Ausdruck verdeutlicht zwei allgemeingültige Eigenschaften von SC-Filterschaltungen:
{ Zeitkonstanten sind proportional zum Verhältnis von Kapazitäten,
{ Zeitkonstanten sind umgekehrt proportional zur Taktfrequenz.
Das ist einerseits wichtig für die technologische Realisierung, da Kapazitätsverhältnisse wesentlich
genauer hergestellt werden können als Absolutwerte. Andererseits kann so die Zeitkonstante eines
SC-Filters (Pol-, Nullstelle) relativ einfach digital gesteuert werden.
R1
ft
Ue
C1
C2
C2
Ue
Uo
Uo
a) Verzögerungsglied 1. Ordnung
Φ1
Φ2
T
Φ1
C2
C1
Ue
Uo
Φ2
b) Realisierung mit MOSFET
C
ft
Ue
R
C2
+
C1
+
Uo
c) invertierender SC-Integrator
Bild 5.21: Zum Prinzip eines SC-Integrators
Ue
R
Uo
108
5. Lineare Rechen- und Regelschaltungen mit OPV
Aus einem invertierenden RC-Integrator (Miller-Integrator) erhält man bei Ersatz des Widerstandes
für die I-U-Wandlung z. B. die SC-Schaltung in Bild 5.21 c). Für beide Schaltungen ergibt sich eine
1
äquivalente Übertragungsfunktion für * << T
Uo
= − p1. $
Ue
mit $ =
C2 . 1
.
C1 ft
solange R äquiv = C 1. f gilt.
1
t
Für den SC-Integrator beschreibt eine zeitdiskrete Differenzengleichung den Zusammenhang
zwischen den Ladungen zu zwei aufeinanderfolgenden Taktperioden T wie folgt:
C2 Uo (nT + T) = C2 Uo (nT) - C1 Ue (nT).
Mit Hilfe der (bilinearen) z-Transformation gewinnt man daraus die Übertragungsfunktion
G(z) =
U o (z)
C
= − 1 . 1 .
U e (z)
C2 z − 1
{ G(z) ist die Übertragungsfunktion eines zeitdiskreten Systems (mit äquidistanten Stützstellen)
und ist der Übertragungsfunktion F(p) eines kontinuierlichen Systems äquivalent.
Der zugehörige Frequenzgang G (ω) ergibt sich aus G (z) mit der Substitution z := e j*T zu
G(*) = −
C1
1
.
C 2 e j*T − 1
1 folgt wegen e j*T l 1 + j*T
Für Signalfrequenzen * = 2 f << T
G(*) l −
C1 1
C 2 j*T
und damit ein äquivalentes Verhalten wie die kontinuierliche Integratorschaltung.
C
{ Das für SC-Schaltungen wichtige Kapazitätsverhältnis C 2 wird von den Herstellern im
1
Datenblatt fest vorgegeben und liegt typisch etwa zwischen 10 und 30.
Zur Realisierung von SC-Integratoren gibt es eine große Vielfalt schaltungstechnischer Lösungen.
Insbesondere läßt sich auch das Vorzeichen der Übertragungsfunktion einfach realisieren:
Dazu wird der Kondensator in der ersten Taktphase auf die abzutastende Eingangsspannung Ue
aufgeladen. In der zweiten Taktphase wird der Kondensator mit vertauschten Anschlüssen an den
OPV-Eingang geschaltet. Die dafür benötigten zusätzlichen Umschalter müssen mit dem ZweiPhasen-Takt-System synchronisiert schalten.
{ Die Realisierung erfolgt typisch in CMOS-Technologie, weil sich damit sowohl Kapazitäten
und Analogschalter, als auch Operationsverstärker gut realisieren lassen.
6. Analogkomparatoren mit OPV
6
109
Analogkomparatoren mit OPV
In der elektronischen Signalverarbeitung muß oft ein Größenvergleich zwischen zwei analogen
Signalpegeln durchgeführt und das Ergebnis (Vorzeichen der Differenz) signalisiert werden. Dazu
werden Analogkomparatoren eingesetzt (meist Spannungskomparatoren).
{ Analogkomparatoren zeigen an ihrem Ausgang durch "High"- oder "Low"-Pegel das Ergebnis
des Größenvergleichs an und wirken somit als Interface zwischen analogen und digitalen
Funktionseinheiten (1-Bit-Analog-Digital-Umsetzer).
Typische Einsatzfälle für Analogkomparatoren sind auch Schmitt-Trigger, Pegeldetektoren und
andere Kippschaltungen (Monoflop, Signalgeneratoren). Grundsätzlich werden die Anforderungen
an einen Analogkomparator auch von Operationsverstärkern (Großsignalaussteuerung) erfüllt:
{ kleine Ansprechschwelle (hohe Leerlaufverstärkung),
{ große Anstiegsgeschwindigkeit der Ausgangsspannung (hohe Slew Rate),
{ übersteuerungsfeste Eingangsstufe, übersteuerungsfeste und latch-up-freie Ausgangsstufe.
Von den Herstellern werden spezielle Komparatorschaltkreise angeboten, die hinsichtlich ihrer
dynamischer Eigenschaften (kleinere Umschalt-, Einschwing- und Erholzeiten) Universal-OPV im
Komparatorbetrieb überlegen sind. Dafür sind ihre statischen Eingangskennwerte typisch schlechter
(z. B. höhere Eingangsströme). Die besseren dynamischen Daten werden u.a. dadurch erreicht, daß
die Spannungsverstärkung V0 kleiner als bei OPV gewählt wird (103 ... 104). Das ist wegen des
meist nichtgegengekoppelten Betriebes von Komparatoren oft unkritisch, man kann so aber höhere
Bandbreiten erzielen (B . V0 = konstant). Außerdem läßt sich die kleinere Verstärkung einfacher
durch einen zweistufigen Aufbau realisieren (vgl. auch Abschnitt 3.6).
Viele Komparatorschaltkreise besitzen einen Open-Kollektor- bzw. Tristate-Ausgang (zusätzlicher
Steuereingang für Strobe-Signal nötig), so daß einerseits Schaltkreisausgänge zusammengeschaltet
werden können und andererseits z. B. eine einfache Anpassung an die Logikpegel verschiedener
digitaler Schaltkreisfamilien möglich ist.
6.1
Statisches Verhalten
Das statische Verhalten des Analogkomparators wird anschaulich durch die Übertragungskennlinie
beschrieben (Bild 6.1). Dabei ist es analog zur OPV-Technik zweckmäßig, zunächst von einem
idealisierten Komparator auszugehen (F o d ∞, I e+ = I e− = 0, U off = 0 ).
+U
U1
-
U2
+
+ Uomax
CC
Fo
-U
Uo
CC
a) Prinzipschaltung
Uo
- U omax
Fo
+Uomax
Fo
- U omax
b) endliche Verstärkung
Uo
+ U omax
U2- U1
U 2- U1
- U omax
c) unendliche Verstärkung
Bild 6.1: OPV als Analogkomparator; Prinzipschaltung und Übertragungskennlinie
110
6. Analogkomparatoren mit OPV
Der ideale Komparator besitzt eine unendliche Verstärkung und verschwindende Eingangsströme.
Die Ausgangsspannung Uo nimmt den Wert einer Sättigungsspannung U +o max bzw. U −o max an, wenn
die Eingangsdifferenzspannung UD = U2 - U1 von Null abweicht. Nur für UD = 0, also exakt gleiche
Eingangsspannungen, ist auch die Ausgangsspannung Uo des idealen Komparators Null (Bild 6.1).
Es gilt folgende Zuordnung zwischen Eingangs- und Ausgangsspannung:
UD = U2 - U1 > 0 __> U o = U o+max ,
UD = U2 - U1 < 0 __> U o = U o−max .
{ Die eingangsseitigen Umschaltspannungen U1S bzw. U2S werden bei UD = 0 bestimmt.
Bei endlicher Verstärkung F0 des Komparators gilt für die Ausgangsspannung UO (Bild 6.1. b):
UO
=
U +o max
U +o max
[ U2 − U1
F0
−
U o max
U+
< U 2 − U 1 < o max .
F0
F0
U −o max
F0 m U2 − U1
für
F 0 (U 2 − U 1 ) für
U −o max
für
Die Ausgangsspannung Uo eines Komparators mit endlicher Verstärkung F0 nimmt den Wert einer
Sättigungsspannung U +o max , U −o max genau dann an, wenn die eingangsseitige Differenzspannung UD
U−
U+
die Ansprechschwellen Fo max bzw. Fo max über- bzw. unterschreitet. Für Spannungen UD innerhalb
0
0
U−
U+
dieses Bereiches ( Fo max < U 2 − U 1 < Fo max ) ist die Ausgangsspannung von der Verstärkung F0
o
o
abhängig und es gilt UO = F0 (U2 - U1 ).
{ Bei bipolarem Ausgangssignal kann bei geeigneter Stromversorgung (+UCC = - UCC ) für die
Sättigungsspannungen des Komparators oft vereinfacht U o−max l −U o+max = −U o max gesetzt
werden (Bild 6.1 b, c).
Einfluß von Offset- und Driftgrößen auf die Umschaltschwelle
Die Umschaltspannung eines realen Komparators ist abhängig von den Offset- und Driftgrößen des
eingesetzten OPV- bzw. Komparatorschaltkreises (Bild 6.2). Die entsprechende Verschiebung der
Umschaltschwelle entspricht der wirksamen Eingangsoffsetspannung UIO am Komparatoreingang
und ist von der Beschaltung abhängig (Wirkung der Eingangsströme).
+ Uomax
Ri
ideal
-
Uoff
I eRn
Uo
I e+
+
F0
Uo
UIO
Ugl
G
- U omax
Bild 6.2: Zur Bestimmung der wirksamen Eingangsoffsetspannung
Us+ - U s-
6. Analogkomparatoren mit OPV
111
Unter Beachtung der eingangsseitigen Kennwerte Uoff , Ie+ , Ie- und der durch die äußere Schaltung
resultierenden Widerstände Ri , Rn am invertierenden bzw. nichtinvertierenden Eingang erhält man
U gl
wegen U s− = R i I e− , U s+ = R n I e+ ! U off ! G die wirksame Eingangsoffsetspannung des Komparators
U IO = U s+ − U s− = R n I e+ − R i I e− ! U off !
U gl
.
G
I
+I
Mit den OPV-Kennwerten Eingangsstrom I e := e + 2 e− und Eingangsoffsetstrom I off := I e+ − I e−
(Herstellerangaben, vgl. auch Tafel 3.1) folgt für diese Eingangsoffsetspannung schließlich
U IO = − R i
U gl
I − I e−
I e+ + I e−
I + I e− I e+ − I e−
− e+
+ R n e+
+
! U off !
2
2
2
2
G
= I e (R n − R i ) +
bzw.
U gl
I off
(R i + R n ) ! U off !
2
G
U IO = −R I off ! U off !
U gl
G
für
Ri = Rn = R .
Für die Temperatur-Drift der wirksamen Eingangsoffsetspannung erhält man entsprechend
U IO
I e I off
I e I off
U off
= −R i
−
+ Rn
+
!
T
T 2T
T 2T
T
=R
I off U off
!
T
T
für R i = R n = R .
{ Der Fehler der Umschaltschwelle infolge endlicher Eingangsströme kann durch geeignete
Bemessung der Widerstände Ri = Rn , allgemein yi = y n , minimiert werden (vgl. auch
Abschnitt 3.3.5, Widerstandssymmetrierung). Bei hohen Genauigkeitsforderungen an die
Umschaltschwelle empfiehlt sich auch die Kompensation der Eingangsoffsetspannung Uoff .
{ Bei realen OPV mit endlicher Gleichtaktunterdrückung G ist die Umschaltspannung des
Komparators auch noch von der anliegenden Gleichtaktspannung Ugl = U2 abhängig. Dieser
Gleichtaktanteil kann durch eine eingangsseitige Spannungsquelle in der Ersatzschaltung
beschrieben werden (Bild 6.2).
6.2
Dynamisches Verhalten
Die statische Betrachtung der Arbeitsweise eines Analogkomparators und die daraus resultierende
dU 1
Bestimmung der Umschaltschwellen ist nur gültig, solange die Änderungsgeschwindigkeit k =
dt
der Eingangsspannung U1 (für U2 = konst.; Bild 6.1) entsprechend klein ist. Die Ausgangsspannung
dU
dU
ändert sich dabei gemäß dt o = V 0 dt 1 = k . V 0 .
{ Die Umschaltung am Ausgang ist abgeschlossen, bevor es zu einer merklichen Übersteuerung
des Komparators kommt. Die Änderung des Eingangssignales während dieser Umschaltzeit
ist sehr klein und kann meist vernachlässigt werden.
Beispiel: OPV µA 748 mit
dU o
U o max
.
. .
5
−1
.
V 0 = 50 V d dt = k V 0 = k 2 10 Vs
112
6. Analogkomparatoren mit OPV
Bei hinreichend schnellen Eingangssignalen kommt es bereits während der Umschaltung zu einer
Übersteuerung (Großsignalaussteuerung), d.h. die maximale Änderungsgeschwindigkeit der Ausgangsspannung UO ist jetzt durch die Slew Rate S gegeben. Das Eingangssignal erreicht ggf.
beträchtlich abweichende Werte von den statischen Schaltschwellen, bevor die Umschaltung am
Ausgang abgeschlossen ist.
{ Man spricht von einer dynamischen Verschiebung der Komparationsgrenzen.
Nach einer Übersteuerung des Komparators kann die Ausgangsspannung auch bei sprungförmiger
Änderung des Eingangssignals frühestens nach einer Totzeit t0 ihren Zustand ändern. Bei linearer
Eingangsspannung beginnt eine merkliche Änderung erst nach einer weiteren Verzögerungszeit t1 .
Der Umschaltvorgang ist zum Zeitpunkt t2 beendet (Bild 6.3).
U1(t 2 )
U1
U1
U1(t) = k.t
U11
U12
U1(t 1)
U2
t0
Uo+
Uo
t2
t1
t
U+
o
Uo (t)
Uo
Uo2
t
Uo-
t
Uo-
a) zeitlineares Eingangssignal
U+o
U2+ V
0
U2
t
Uo1
b) sprungförmiges Eingangssignal
Bild 6.3: Zur dynamischen Verschiebung der Komparationsgrenzen
Aus Bild 6.3 a) erhält man für die Eingangsspannung U1 (t1 ) und U1 (t2 ) mit U1 m U2 und t0 = 0:
U1 (t1 ) = U2 + k . t1 bzw. U1 (t2 ) = U2 + k . t1 + k . (t2 - t1 ).
Zum Zeitpunkt t1 ist der Sättigungszustand des OPV beendet, die Ausgangsspannung UO ändert
sich jetzt abhängig von der Aussteuerung (Klein- bzw. Großsignalaussteuerung). Zum Zeitpunkt t2
hat die Ausgangsspannung den anderen Sättigungswert (U o− max in Bild 6.3 a) erreicht. Damit ist der
dU
Umschaltvorgang abgeschlossen. Wegen der endlichen Änderungsgeschwindigkeit S = dt o |max der
Ausgangsspannung (Slew Rate) gilt für übersteuerten Betrieb des Komparators
t2 − t1 [
U +o max − U o−max
.
S
6. Analogkomparatoren mit OPV
113
dU
1
Ist die Änderungsgeschwindigkeit k =
des Eingangssignales U1 groß genug, so ändert sich die
dt
Ausgangsspannung UO praktisch unabhängig von k mit der Geschwindigkeit S (Slew Rate). Für die
Ausgangsspannung bzw. die Umschaltschwellen erhält man damit eine modifizierte Form unter
Berücksichtigung der dynamischen Verschiebung der Komparationsgrenzen
U +O max für
U 1 [ U2 + k. t1
UO =
U +o max − U −o max
.
U−
für
U
[
U
+
k
t
+
k
1
2
1
S
O max
6.3
6.3.1
mit k =
dU 1
dt
.
Komparatoren ohne Rückkopplung
Komparator-Grundschaltungen
Mit OPV lassen sich durch einfache Beschaltung praktische Komparatorschaltungen realisieren.
{ Die zu vergleichenden Eingangsspannungen können getrennt an beiden Eingängen oder auch
gemeinsam an einem Eingang des OPV angeschlossen werden.
Bild 6.4 zeigt zwei Komparator-Grundschaltungen mit OPV und ihre Übertragungskennlinien.
Uo
+ Uomax
U1
U2
ideal
R
F0
R
Uo
+
- U omax
a) mit Gleichtaktaussteuerung
U1
U2
U
2 omax
V0
Uo
R1
R2
U 2 - U1
U IO
+Uomax
F0
+
Uo
U*
2
R1|| R2
b) ohne Gleichtaktaussteuerung
U
4 omax
V0
U1
- Uomax
Bild 6.4: Komparator-Grundschaltungen mit OPV und ihre Übertragungskennlinien
114
6. Analogkomparatoren mit OPV
Die Schaltung in Bild 6.4 a) entspricht funktionell der Prinzipschaltung in Bild 6.1. Die angegebene
Widerstands-Dioden-Schaltung schützt den Verstärkereingang gegen zu hohe Differenzspannungen
(-UF < UD < UF ). Nachteilig an dieser Schutzschaltung ist die Belastung der Signalquellen bei
Eingangsspannungen |U2 - U1 | > UF durch den dann wirksamen Widerstand Ri = 2 R + rF .
{ Neben der funktionell gewünschten Differenzansteuerung UD = U2 - U1 erfolgt auch eine
Gleichtaktansteuerung mit Ugl = U2 , die die Umschaltschwelle beeinflußt.
Diesen Gleichtaktfehler vermeidet die Schaltung in Bild 6.4 b), dafür erfolgt durch die Widerstände
eine Spannungsteilung und damit eine eingangsbezogene Reduktion der wirksamen Verstärkung.
{ Der Differenz-Eingangsspannungsbereich ist kleiner als bei der Schaltung in Bild 6.4 a). Der
Spannungsvergleich erfolgt dadurch, daß die beiden Signalquellen über einen Widerstand
einen Strom in den Summationspunkt einspeisen. Die Eingangsdifferenzspannung UD ist nur
Null, wenn beide Ströme betragsmäßig gleich sind (idealer OPV). Mit
folgt
U 1 − U s− U 2 − U s−
+
+ I e− = 0
R1
R2
U s− =
und
R2
R1
R1R2
U +
U +I
R 1 + R 2 1 R 1 + R 2 2 e− R 1 + R 2
U s+ = U off + I e+
R1R2
.
R1 + R2
Gegen zu hohe Eingangsspannungen kann der Komparatoreingang wieder durch Dioden geschützt
werden. Für die Umschaltschwelle U 1S = U &2 der Schaltung (Us+ = Us- , UO = 0; Bild 6.4 b) gilt unter
Berücksichtigung von Eingangs-Offsetspannung Uoff und Eingangs-Offsetstrom Ioff (ohne Dioden):
U 1S = U &2 = −
R1
R
R1R2
U + U off 1 + 1 +
I .
R2 2
R2
R 1 + R 2 off
{ Die Eingangsbeschaltung kann auch am nichtinvertierenden Eingang des OPV angeschlossen
werden.
6.3.2
Komparatoren mit stabilisierter Ausgangsspannung
Der Ausgang von Komparatoren wird zwischen seinen maximalen Ausgangspegeln umgeschaltet.
Das führt i.a. wegen Übersteuerungseffekten und Umladung interner Kapazitäten zu erheblichen
Tot- und Erholzeiten. Außerdem sind die Maximalpegel der Ausgangsspannung in den beiden
Schaltzuständen von der Betriebsspannung und der internen Ausführung der Schaltung abhängig
und typisch unsymmetrisch (U +o max ! −U −o max ) .
{ Eine Begrenzung der Ausgangspegel auf vorbestimmte Werte kann mit bekannten Mitteln
(Dioden, Z-Dioden) schaltungstechnisch erreicht werden. Damit wird u. U. die Sättigung der
OPV-Schaltstufen und ein damit verbundener dynamischer Fehler (Erholzeit tR ) vermieden.
Die Anordnung der Begrenzerschaltungen in Bild 6.5 führt zur (nichtlinearen) Gegenkopplung der
OPV, was eine Frequenzgangkompensation notwendig macht. Die damit verbundene Verringerung
der Arbeitsgeschwindigkeit kann den Vorteil des nichtübersteuerten Betriebes (Wegfall der
Erholzeit) wieder zunichte machen.
6. Analogkomparatoren mit OPV
115
+U
Rv
UZ + U F
U1
U2
R
U1
R
F
+0
U2
Uo
R
2 UF
R
F0
+
R
2
R
2
Uo
Rv
-U
Uo
Uo
UZ + UF
2U F
8
U2
- (U Z+ U F)
U1
U + UF
4 Z
V0
UF
V0
U2
U1
- 2U F
Bild 6.5: Gegengekoppelte Komparatoren mit stabilisierter Ausgangsspannung
In manchen Anwendungen wird eine lineare Verstärkung gefordert, solange die Eingangsspannung
einen bestimmten Wert nicht überschreitet. Dann können die bekannten Verstärkerschaltungen mit
den oben gezeigten Begrenzerschaltungen kombiniert angewendet werden.
{ Bei großen Werten des Rückkopplungswiderstandes wird dabei im linearen Aussteuerbereich
die Verstärkung zunehmend durch den relativ hohen Sperrstrom der Z-Diode(n) beeinflußt.
{ Dynamisch besser sind meist Begrenzerschaltungen nach Abschnitt 5.2.2.
6.3.3
Fensterkomparatoren und Pegeldetektoren
Komparatoren eignen sich u.a. gut zur Umwandlung von relativ niederfrequenten kontinuierlichen
Signalen in Rechtecksignale.
{ Die maximale Anstiegsgeschwindigkeit der Ausgangsimpulse wird dabei durch die Slew Rate
des Komparators bzw. OPV bestimmt.
Fensterkomparatoren zeigen an, ob sich ein Eingangssignal innerhalb bzw. außerhalb eines durch
entsprechende Referenzwerte begrenzten Spannungsbereiches liegt oder nicht.
Pegeldetektoren werden u.a. zur Erkennung des Nulldurchganges bzw. der Maximalwerte einer
Sinusschwingung eingesetzt (Netzspannungsüberwachung).
116
6. Analogkomparatoren mit OPV
In Bild 6.6 sind zwei Fensterkomparatoren mit Logikausgang (Interfaceschaltung) gezeigt.
{ In beiden Schaltungen zeigt der Ausgang Uo bzw. Y immer dann H-Pegel, wenn beide
Komparatorausgänge X1 , X2 hohen Pegel führen. Das ist für U1 < Ue < U2 der Fall.
UCC
U2 > U 1
Uo
Ue
-
U1 > 0
t
- Uomax
Ue
U2
X1
+
Uo
R
X2
+
Uomax
U1
X2
+
U2 > U 1
t
X1
-
&
Ue
Y
t
X2
+
-
U1> 0
t
X1
Y
t
Bild 6.6: Fensterkomparatoren
Bild 6.7 zeigt einen Fensterkomparator als Absolutwertkomparator. Der Ausgang zeigt hohen
Pegel, wenn das Eingangssignal Ue außerhalb des durch die Schwellspannungen UeH und UeL
definierten Bereiches liegt. Bei symmetrischem Aufbau (R1 = R3 , R2 = R4 ) und idealem OPV gilt
für die Ausgangsspannung bei gleichen Flußspannungen UF der Dioden
Uo
>
<
0 für
Ue
>
<
2U F + U CC .
+U
CC
R4
Ue
R3
Uo
D2
+
R1
R2
+U omax
F0
Uo
UeL
U eH
D1
-UCC
-Uomax
Bild 6.7: Absolutwertkomparator
(Quelle: Olsowski, W.: Absolutwertkomparator. Elektronik 29 (1980), H.14, S. 86)
Ue
6. Analogkomparatoren mit OPV
117
Zur Erkennung des Nulldurchganges bzw. der Maximalwerte einer (Sinus-)Schwingung werden
Pegeldetektoren eingesetzt (Bild 6.8). Als Spitzenspannungskomparator eignet sich z. B. der
gegengekoppelte Nullkomparator, wenn die Schaltung als Differenzierer aufgebaut wird.
{ Bei Erreichen des Maximalwertes der Eingangsgröße verschwindet der Eingangsstrom des
dU (t)
I-U-Wandlers wegen i C (t) = C dtC = 0 für UC (t) = Uemax , ändert dann sein Vorzeichen und
der Komparatorausgang schaltet um.
Ue
Ue
+
Uo C
-
D
t
Ua
R
2
R1
Uo
a) Nullpegeldetektor
Ua
t
t
Uo
U Z + UF
C
Ue
+
t
Uo
- U Z + UF
b) Spitzenwertdetektor
Bild 6.8: Pegeldetektoren (Prinzipschaltungen)
6.4
Hysteresekomparatoren mit OPV
Ein wesentlicher Nachteil der o.g. Komparatoren ist die Anfälligkeit gegen Störspannungen und
eine vergleichsweise geringe Umschaltgeschwindigkeit, insbesondere bei Eingangssignalen mit
kleiner Änderungsgeschwindigkeit. Bei langsamen Eingangssignalen (im Umschaltbereich) ändert
sich auch das Ausgangssignal entsprechend langsam. Die Umschaltung ist bei überlagerten Störsignalen unsicher und bei größeren Störpegeln oft erst nach mehrmaligem Hin- und Herschalten
(Flattern) abgeschlossen. Das Störverhalten kann durch Hysterese im Schaltverhalten entscheidend
verbessert werden. Realisiert wird diese Hysterese durch eine positive Rückkopplung bzw.
Mitkopplung des OPV. Man spricht dann auch von einer rückgekoppelten Kippschaltung.
Wird die Rückkopplung schaltungstechnisch als Gleichspannungskopplung realisiert, so kippt das
Ausgangssignal auch bei beliebig langsamer zeitlicher Änderung des Eingangssignals sicher, wenn
die Schaltschwelle einmal überschritten ist. Evtl. Störungen müssen in ihrer Wirkung erst die
Hysteresespannung überwinden, bevor sie zu einem fehlerhaften Umschalten führen.
{ Bei Hystereseverhalten gibt es auf das Eingangssignal bezogen zwei unterschiedliche Schaltschwellen der Komparatorschaltung und der Störabstand wird größer.
{ Durch Mitkopplung wird das Umschalten der Ausgangsspannung beschleunigt; es erfolgt mit
der maximalen Änderungsgeschwindigkeit (Slew Rate) der Ausgangsspannung des OPV.
118
6.4.1
6. Analogkomparatoren mit OPV
Grundschaltungen von Hysteresekomparatoren
Entsprechend den beiden linearen OPV-Grundschaltungen für Verstärker lassen sich auch bei
mitgekoppelten OPV- bzw. Komparatorschaltungen eine invertierende und eine nichtinvertierende
Grundschaltung für Hysteresekomparatoren (Schmitt-Trigger) unterscheiden.
{ Dabei wird das Verhalten Eingangssignal/Ausgangssignal als Bezeichnungskriterium gewählt
(vgl. Bild 6.9, Übertragungskennlinie).
Das Umschalten der Ausgangsspannung zwischen den beiden Sättigungswerten U +o max , U o−max erfolgt,
wenn am Komparatoreingang die Differenzspannung UD das Vorzeichen wechselt (den Wert Null
durchläuft). Bezogen auf die variable Eingangsspannung Ui erfolgt die Umschaltung bei festen
Werten, den sogenannten Eingangs-Schwellspannungen UiH , UiL .
U1
R1|| R2
R1|| R2
U2
R1
Uo
+
R2
U1
U2
R1
+
Uo
+
U omax
U2
U1H
U omax
R2
C2
C2
+
U omax
Uo
U1L
U1
U1
UH
a) invertierend mit U2 = konstant
Uo
U 2L
Uomax
U 2H
U2
UH
b) nichtinvertierend mit U1 = konstant
Bild 6.9: Hysteresekomparatoren mit OPV, Grundschaltungen und Übertragungskennlinien
Unter der Voraussetzung eines idealen OPV (außer endlicher Leerlaufverstärkung VO ) gilt für die
Knotenspannungen der beiden Schaltungen in Bild 6.9:
U
U
U s+ ( 1 + 1 ) − 2 − o = 0, U s− = U 1 ,
R1 R2
R1 R2
U o = V 0 (U s+ − U s− ) .
{ Daraus folgen die Eingangs-Schwellspannungen, wenn in die entsprechende Gleichung der
Wert der Ausgangsspannung des Komparators vor dem Umschalten eingesetzt wird.
6. Analogkomparatoren mit OPV
119
Invertierender Hysterese-Komparator
Für die Umschaltschwellen U1H und U1L des Eingangssignals U1 der invertierenden Schaltung in
Bild 6.9 a) gilt:
U 1H =
R2
R1
R + R2
U +
U − (1 − 1
),
R 1 + R 2 2 R 1 + R 2 o max
V0R1
U 1L =
R2
R1
R + R2
U +
U + (1 − 1
).
R 1 + R 2 2 R 1 + R 2 o max
V0R1
Für die Ausgangsspannung UO gilt entsprechend
UO
U +o max für U 1 [ U 1L
=
.
U−
o max für U 1 m U 1H
Die Differenz der beiden Schaltschwellen wird als Hysteresespannung UH bezeichnet und ist ein
Maß für den Störabstand der Schaltung.
U H = U 1L − U 1H =
R1
R + R2 ( +
(1 − 1
) U o max − U o−max ) .
R1 + R2
V0R1
Bei symmetrischen Maximalpegeln der Ausgangsspannung und idealem OPV gilt einfacher
R
U H = 2 R +1R U o max .
1
2
{ Mit Spannung U2 lassen sich die Schaltschwellen verschieben, ohne den Hysteresebereich zu
ändern.
{ Bei großen Werten für Widerstand R2 (kleine Hysterese) verringert die Eingangskapazität des
R
OPV zunehmend die Umschaltgeschwindigkeit. Eine Beschleunigungskapazität C2 >> R 1 C i
kann diesen Einfluß kompensieren (Bild 6.9 a, vgl. auch Abschnitt 4.4).
2
{ Beim Vergleich von Signalen mit konstanter Geschwindigkeit (z. B. Nullkomparation von
Sinussignalen annähernd konstanter Frequenz) kann ggf. bereits ein geeignet bemessener
Kondensator C2 ausreichen, um eine schnelle Umschaltung zu bewirken und den Störabstand
zu sichern; Widerstand R2 kann dann entfallen.
Nichtinvertierender Hysterese-Komparator
Für die Umschaltschwellen U2H , U2L der nichtinvertierenden Komparatorschaltung in Bild 6.9 b)
gilt:
R + R2
R
R + R2
U 2H = 1
U 1 − 1 U o−max (1 − 1
),
R
R
V R
2
U 2L =
2
0
1
R1 + R2
R
R + R2
U 1 − 1 U +o max (1 − 1
).
R2
R2
V0R1
Für die Hysteresespannung UH folgt damit
U H = U 2H − U 2L =
R1
R + R2 ( +
(1 − 1
) U o max − U o−max ) .
R2
V0R1
120
6. Analogkomparatoren mit OPV
Bei symmetrischen Maximalpegeln der Ausgangsspannung und idealem OPV gilt einfacher
R
U H = 2 R 1 U o max für U +o max = −U −o max = U o max und V 0 d ∞ .
2
Die beiden Grundschaltungen unterscheiden sich sowohl im Wertebereich der Schwellspannungen
als auch im Eingangswiderstand.
{ In der invertierenden Schaltung sind die Eingangs-Schwellspannungen bei U2 = 0 immer
kleiner als die Ausgangssättigungsspannungen des OPV. Die Signalquelle U1 sieht einen sehr
hochohmigen Eingangswiderstand Rein = R1 || R2 + Re- l Re- .
{ In der nichtinvertierenden Schaltung können die Schwellspannungen auch für U1 = 0 größere
Werte als die Ausgangssättigungsspannungen des OPV annehmen. Die Signalquelle U2 wird
durch den Eingangswiderstand Rein = R1 + R2 || Re+ l R1 + R2 belastet.
Getrennte Einstellung der Schwellspannungen
Die Schwellspannungen lassen sich unabhängig voneinander einstellen, wenn die Rückkopplung
mit Hilfe von Dioden nichtlinear ausgeführt wird. Die Widerstände in Reihe mit einer Diode sind
nur wirksam bei leitender Diode. Bild 6.10 zeigt einige Beispiele für invertierende Komparatoren.
U1
R
+
Uo
V0
R
2
Us+
D
R1
a)
U1
R
+
UF
c)
D
UF
U*
o
R = R1 || R2
Uo
U1
U*o
R
Us+
R22
R21
R1
R1
b)
Uo
V0
R
2
Us+
U*
o
V0
Us+
+
R = R1 || R2
U1
R
R12
d)
+
V0
Uo
R2
R11
Bild 6.10: Hysteresekomparatoren mit getrennter Einstellung der Schwellspannungen
6. Analogkomparatoren mit OPV
121
Für die Schaltung nach Bild 6.10 a) ist die Diode D für U o = U o−max gesperrt und es ergeben sich
folgende Umschaltschwellen bei idealem OPV
R
U 1L = R +1R (U +o max − U F )
1
2
und
U 1H = 0 .
Bei umgepolter Diode D (vgl. Bild 6.10 b) wird entsprechend die Schwellspannung U1L = 0,
während die Schwellspannung U1H gegenüber der Grundschaltung aus Bild 6.9 (bei U2 = 0) um den
Anteil der Flußspannung UF der Diode verschoben wird.
Werden zwei getrennte Rückkopplungszweige mit Widerstand und Diode realisiert (Bild 6.10 c, d),
so lassen sich beide Schwellspannungen unabhängig wählen. In beiden Schaltungen gilt für den
Strom IR im Rückkopplungszweig betragsmäßig
IR =
U o max − U F
.
R1 + R2
Unter Beachtung der Spannungspolaritäten von UO lassen sich damit die Vergleichsspannungen Us+
und somit auch die Schaltschwellen bestimmen.
6.4.2
Hysteresekomparatoren mit stabilisierter Ausgangsspannung
Die maximalen Ausgangspegel von OPV bzw. Komparatorschaltkreisen sind typisch abhängig von
der Betriebsspannung und deren Änderungen. Diese Abhängigkeit kann mit Diodenschaltungen
bedeutend reduziert werden. Gleichzeitig kann die Anpassung an die Pegelwerte der nachfolgenden
Schaltungen erfolgen (Interface). Die Stabilisierungsschaltungen sind grundsätzlich identisch mit
den Schaltungen in Abschnitt 5.2 (Bild 5.3 c, d).
U1
R 1|| R2
Rv
+
R1
U2
Uo
R2
Uo = UZ
ZD
UK+
U2
UKUZ
U1
t
Uo
- UF
t
Bild 6.10: Hysteresekomparator mit stabilisierter Ausgangsspannung
Besteht die Forderung nach symmetrischen Umschaltschwellen bezüglich eines Referenzwertes, so
müssen auch die Ausgangsspannungen symmetrisch zu diesem Referenzwert sein. Für die
Komparatorschaltung in Bild 6.10 muß dann für die Referenzspannung U2 die folgende Forderung
erfüllt werden:
U2 =
UZ − UF
2 R2
R1 + R2
R
− R 1 l 1 (U F − U Z ) .
V0
2 R2
122
6. Analogkomparatoren mit OPV
6.4.3
Hysteresekomparator mit Flipflop
Ein Komparator mit in weiten Grenzen einstellbarer Hysterese läßt sich mit einem Doppel-OPV
und einem RS-Flipflop realisieren. Für diese Schaltungsstruktur läßt sich eine Vielzahl
entsprechender OPV-Schaltkreise verwenden (Bild 6.11, 6.12). In speziellen Timer-Schaltkreisen
ist auch das Flipflop mitintegriert (z. B. NE 521, LM 555).
U2
X1
X2
+
&
-
Y
X2
Ue
U
1
&
X1
+
Ue
U1
Y
Y
-
Ue
U2
Ue
Bild 6.11: Hysteresekomparator mit RS-Flipflop
V+
8
4
R
THRESHOLD
CONTROL VOLTAGE
TRIGGER
6
+
5
>1
R
Q
3
R
7
+
2
RESET
OUTPUT
DISCHARGE
>1
S
R
555
1
GND
Bild 6.12: Timer-Schaltkreis 555
Der Timer-Schaltkreis 555 ist recht universell einsetzbar. Hauptanwendungen sind:
{ Hysteresekomparator mit U H = 13 U CC bei UCC = (5 ... 15) V,
{ Monoflop,
{ astabiler Multivibrator (Rechteckgenerator).
Weitere Ausführungen zu diesem Schaltkreis und Anwenderschaltungen sind in Abschnitt 7 und im
Script Digitale Schaltungen enthalten.
7. Signalgeneratoren
7
123
Signal- und Funktionsgeneratoren
Signalgeneratoren werden zur Erzeugung unterschiedlicher Signalformen im gesamten technisch
genutzten Frequenzbereich benötigt. Hauptanwendungen sind z. B. Taktgeneratoren, Modulatoren
Zeitbasisgeneratoren, Testsignalgeneratoren. Wichtige Kenngrößen von Signalgeneratoren sind die
Signalform und Ausgangsamplitude, die Signalfrequenz (Oszillatorfrequenz) sowie die Stabilität
von Frequenz und Amplitude. Die meist genutzten Signalformen sind Sinussignale, zeitlineare
Signale (Dreieck, Sägezahn) sowie Sprung- und Rechtecksignale. Es werden sowohl periodische als
auch nichtperiodische Signale, Einzel- und Mehrfachimpulse gefordert.
Zur Signalerzeugung werden rückgekoppelte Oszillatoren (RC-Oszillatoren, Kippschaltungen)
angewendet (Bild 7.1). Bei geeigneter Bemessung der Schaltung (Schleifenverstärkung) entstehen
selbsterregte Schwingungen (Generator). Wegen der idealen OPV-Eigenschaften erzeugen diese
Schaltungen i.a. hochgenaue Signalformen mit guter Frequenzstabilität im Nf-Bereich.
{ Sowohl bei hohen Frequenzen (Integrationsfehler, Verschiebung der Komparatorschwellen)
als auch bei sehr niedrigen Frequenzen (Integrationsfehler, Drift) wird die Anwendung von
OPV zunehmend eingeschränkt.
U1 (t)
Verstärker
U2(t)
Rückkopplungs-Netzwerk
RL
Uo (t)
Re
Bild 7.1: Prinzip des rückgekoppelten Oszillators
Sinusoszillatoren
Die Schwingfrequenz von Sinusoszillatoren wird in der Regel durch einen Resonanzkreis festgelegt
und ist nur geringfügig von den Daten der aktiven Elemente der Schaltung abhängig. Bekannte
RC-Oszillatorschaltungen sind Wienbrückenoszillator, Wien-Robinson-Oszillator, Phasenschieberund Doppel-T-Oszillator. Damit selbsterregte Schwingungen entstehen und möglichst unverzerrte
Sinussignale mit stabiler Ausgangsamplitude erzeugt werden, sind geeignete lineare Regel- oder
nichtlineare Begrenzerschaltungen zur Amplitudenstabilisierung notwendig:
Beim Einschalten des Oszillators muß für die Schleifenverstärkung |Ko Fo | > 1 erfüllt werden, damit
sich Schwingungen aufschaukeln. Die Ausgangsamplitude wächst an, bis sie durch nichtlineare
Elemente oder eine Regelschaltung begrenzt wird. Dagegen wird im stationären Fall für die
gewünschte Oszillatorfrequenz |Ko Fo | = 1 (Selbsterregungsbedingung), für alle anderen Frequenzen
|Ko Fo | < 1 gefordert, damit möglichst unverzerrte Sinussignale mit stabiler Amplitude entstehen.
Dafür gibt es eine große Anzahl schaltungstechnischer Lösungen, die sich sowohl im Aufwand als
auch in den damit erreichbaren Kennwerten stark unterscheiden. Für weitergehende Betrachtungen
dieser Schaltungen wird auf die Fachliteratur verwiesen /4/.
Spezielle Signalgeneratoren mit OPV
Aus Integratoren und Komparatoren lassen sich spezielle Dreieck- bzw. auch Impulsgeneratoren
realisieren. Mit Hilfe einer zusätzlichen Signalformung, z. B. mit Dioden-Netzwerken, lassen sich
daraus dann weitere Signalformen ableiten (u.a. auch Sinus).
124
7.1
7. Signalgeneratoren
Spezielle Signalgeneratoren mit OPV
Die meisten Schaltungen spezieller Signalgeneratoren mit OPV lassen sich auf die Grundstruktur
eines Dreieck-Rechteck-Generators zurückführen, die aus einer Ringschaltung von Integrator und
Komparator besteht (Bild 7.2). Die Schaltung arbeitet als freilaufender Generator, d.h. sie benötigt
kein externes Steuersignal und schwingt beim Zuschalten der Stromversorgung der OPV sicher an.
{ Der Integrator integriert die konstante Ausgangsspannung des Komparators (z. B. +Uomax ) mit
der Zeitkonstante C. R1 , bis am Komparatoreingang die Schwellspannung UK1 erreicht ist und
der Komparatorausgang umkippt (-Uomax ). Der Integrator integriert jetzt diese neue Eingangsspannung, bis am Komparatoreingang die obere Schwellspannung UK2 erreicht ist und der
Komparatorausgang erneut umschaltet. Dieser Vorgang wiederholt sich periodisch.
R3
UK2
U2
T
C
U
s+
+
R4
-
t
R1
-
R || R
3 4
UK1
U2
+
U1
U+
R =R
2
1
Komparator
U1
U+= - U = U omax
Integrator
T1 T2
t
U-
Bild 7.2: Grundschaltung für Dreieck-Rechteck-Generatoren mit OPV
U
U
Aus der Knotengleichung U s+ ( R1 + R1 − R 1 − R 2 ) = 0 folgen für idealen OPV bei Us+ = UK = 0 die
3
4
4
3
beiden Schaltschwellen der Eingangsspannung U2 zu
U 2K1 = −
R3 +
U
,
R 4 o max
U 2K2 = −
R3
(−U o−max ) .
R4
Die Periodendauer T des Ausgangssignales bestimmt sich aus der Integratorrelation für die beiden
Teilzeiten T1 , T2 gemäß Bild 7.2 zu
U 2 (t) = U 2 (0) −
t
1
¶ U dt = U 2 (0) − t U 1 ,
R1 C 0 1
R1 C
T = T1 + T2 = R1C
R3
R4
U +o max − U −o max
U− − U+
+ o max − o max .
+
U o max
U o max
Bei symmetrischer Ausgangsspannung U +o max = −U −o max am Komparatorausgang erhält man für die
R
1 sind unabhängig
Periodendauer T = 4 . R 1 C R 3 , d.h. die Periodendauer T bzw. die Frequenz f = T
4
von der Ausgangsamplitude UO des OPV.
{ Für eine gute Frequenzstabilität muß der Integratorstrom wesentlich größer sein als der
Offsetstrom des OPV (Bemessung von Widerstand R1 , Wahl des OPV).
7. Signalgeneratoren
125
Generatorschaltungen nach Bild 7.2 arbeiten typisch bei Oszillatorfrequenzen f = 0,1 Hz ... 1 MHz
mit Anstiegszeiten tr , tf < 0,1 µs. Beim Einsatz hinreichend stabiler passiver Bauelemente sind
sowohl der Betriebsspannungseinfluß (< 1%) als auch der Temperatureinfluß (± 0,02%) auf die
Frequenz gering.
Die Amplitude der Dreieckschwingung ergibt sich aus der Differenz der beiden Umschaltschwellen
U2SS = |UK2 - UK1 | und kann durch Wahl dieser Pegel eingestellt werden (Bemessung R3 , R4 ).
Impulsgenerator mit einstellbarem Tastverhältnis
Eine geeignete Modifikation der Grundschaltung führt zu einem Impulsgenerator mit einstellbarem
Tastverhältnis (Bild 7.3). Dazu wird mit Hilfe von Dioden der Widerstand R für den Auf- und
Entladevorgang des Integrationskondensators unterschiedlich ausgelegt (in Bild 7.3 gilt R1a < R 1b).
Die Summe der Widerstände (R1a + R1b) und auch die Impulsfolgefrequenz bleiben konstant. Für
das Tastverhältnis bzw. die Frequenz f der Impulsfolge gilt
R 1a
T1
=
,
T 1 + T 2 R 1a + R 1b
R
1
.
f= 1 l 4
T R 3 2 C (R 1a + R 1b )
{ Nachteilig für die Frequenzstabilität ist die Temperaturabhängigkeit der Diodenspannungen.
U2
R3
R4
R1b
+
R1a
R 3 || R 4
+
U1
R1a< R1b
t
C
U2
U1
R1
T1
T2
t
Bild 7.3: Impulsgenerator mit einstellbarem Tastverhältnis
Linearer Impulsbreitenmodulator
Eine genauere Festlegung bzw. Steuerung der Impulsbreite ist mit der Schaltung nach Bild 7.4
möglich. Sie besteht aus der Grundschaltung nach Bild 7.2 und einem zusätzlichen Komparator.
Der Dreieck-Rechteck-Generator erzeugt wieder eine Impulsfolge U1 bzw. ein Dreiecksignal U2
mit fester Frequenz. Der zusätzliche Komparator liefert an seinem Ausgang U3 eine Impulsfolge,
deren Impulsbreite durch die Eingangsspannung Ui und das Dreiecksignal gesteuert wird. Die
Schaltung findet deshalb auch als linearer Pulsbreitenmodulator (Pulsdauermodulator, PDM)
Anwendung.
{ Die Ausgangsspannung U3 ist positiv, solange die Dreieckspannung an U2 größer ist als die
zu modulierende Spannung Ui , sonst negativ (Bild 7.4). Das Tastverhältnis der Impulsfolge
an U3 ist damit von der Eingangsspannung Ui abhängig und es gilt:
T1 U2 − Ui
T2 = U2 + Ui ,
T = T1 + T2 .
126
7. Signalgeneratoren
U2
UK2
R3
R4
R1
-
UK1
C
+
R1
U1
Uomax
U2
+
R3 || R4
T1
T2
-
U1
Ui
t
+
-
Ui
t
U3
-Uomax
U3
Uomax
t
-Uomax
Bild 7.4: Linearer Impulsbreitenmodulator
Impulsgenerator mit einem OPV
Die Schaltung eines Impulsgenerators mit nur einem OPV ist in Bild 7.5 angegeben. Die Funktion
des Integrators aus der Grundschaltung übernimmt hier näherungsweise das passive RC-Glied
(Verzögerungsglied).
{ Auffällig ist die Ähnlichkeit der Schaltung zur Realisierung eines astabilen Multivibrators
mit einem digitalen Schmitt-Trigger-Schaltkreis.
U
R
UK+
-
Uo
+
UC
Uo
+ U omax
C
R
R1 2
UC
t
UK- Uomax
Bild 7.5: Multivibrator mit einem OPV
Unter Annahme symmetrischer Ausgangspegel des OPV ergibt sich für die Umschaltschwellen
bzw. für die Periodendauer T (Frequenz f) der Impulsfolge:
U k+ = −U k− =
R1
U
R 1 + R 2 o max bzw.
2R 1 + R 2
T = T 1 + T 2 = 1 = 2RC ln
.
R2
f
7. Signalgeneratoren
127
Beleuchtungsstärke-Frequenzwandler
Eine Anwendung des Multivibrators aus Bild 7.5 als Beleuchtungsstärke-Frequenzwandler zeigt die
Schaltung in Bild 7.6. Dabei wird die nichtelektrische Größe Beleuchtungsstärke zunächst über den
Fototransistor in ein elektrisches Stromsignal IF und dann in eine Spannung UO mit der Frequenz f
umgewandelt. Die Diodenbrücke bewirkt bei beiden Ausgangspegeln von UO die richtige Polarität
zur Ansteuerung des Fototransistors (vgl. Abschnitt 8.3).
{ Bei symmetrischen Pegeln der Ausgangsspannung U0 der Schaltung gilt für die Frequenz f
über mehrere Dekaden ein streng linearer Zusammenhang zur Beleuchtungsstärke f i I F :
f = IF
R1 + R2 1
.
C.R1 4.Uo
Eine Steigerung der Eingangsempfindlichkeit der Schaltung bei kleinen Werten von IF , bezogen auf
den Eingangsstrom Ie des OPV, gelingt z. B. mit einer Darlingtonstufe. Bei großen Werten von IF
bzgl. des zulässigen Ausgangsstromes IO des OPV, muß dem OPV-Ausgang ggf. eine geeignete
Leistungsstufe nachgeschaltet werden (vgl. Abschnitt 5.2.3).
IF
C
+ R
2 (47 k)
R 3 (1 k)
Uo
I*F
Darlingtonstufe
R1 (4,7 k)
Bild 7.6: Wandlung eines Fotostromes in eine Frequenz
7.2
Monostabiler Multivibrator mit OPV
Monoflops sind Schaltungen mit einem stabilen und einem quasistabilen Zustand. Wird durch
einen Eingangsimpuls ein Monoflop in diesen quasistabilen Zustand gebracht, so kippt der
Ausgang nach Ablauf der Haltezeit tH selbständig in den stabilen Zustand zurück. Während der
Haltezeit wird kein Eingangssignal mehr benötigt bzw. es bleibt wirkungslos. Mit Monoflops
lassen sich damit Impulse definierter Breite erzeugen.
Im Interesse steiler Ausgangsflanken (unabhängig von der Steilheit des Eingangssignales) werden
meist rückgekoppelte Kippschaltungen zur Realisierung eingesetzt. Das monostabile Verhalten
wird durch eine zeitabhängige Rückführung, typisch ein RC-Glied, erreicht.
Zur Realisierung von Monoflops existieren in allen Schaltkreistechniken eine ganze Reihe von
speziellen Monoflop- bzw. Timer-Schaltkreisen (vgl. auch Script Digitale Schaltungen). Sie lassen
sich aber auch mit OPV auf einfache Weise realisieren. Oft verwenden diese Monoflop- bzw.
Timer-Schaltkreise intern selbst OPV zur genauen Festlegung der Eingangs- Schwellspannungen.
128
7. Signalgeneratoren
Bild 7.7 zeigt einen einfachen monostabilen Multivibrator mit einem OPV. Im stationären Zustand
der Schaltung gilt Us - = UR < 0, Us+ = 0, U O = U +o max .
Us t
Ui
UR
+
R
C
t
R2
R1
U s+
Uo
D
UF
UR
R
+
Uomax
U <0
R
Uo
tH
tw
Hilfsschaltung
t
U omax
Bild 7.7: Monostabiler Multivibrator mit OPV
Ein positiver Triggerimpuls (Rechteck-, Nadelimpuls) mit einer Amplitude Ui > |UR | führt zum
Umschalten des OPV-Ausganges auf U O = U o−max . Im Schaltmoment wird die Mitkopplung über die
R
Kapazität C und die Widerstände R1, R2 wirksam und so die Spannung U s+ = R +1 R U o−max < 0 . Sie
1
2
hält das Monoflop auch bei verschwindendem Eingangsimpuls Ui im quasistabilen Zustand. In der
Folgezeit wird die Kapazität C über die Reihenschaltung der Widerstände R1 , R2 aufgeladen,
während die Spannung Us+ bis auf den Wert der Umschaltschwelle Us+ = Us- = UR < 0 verringert
wird (Dauer des quasistabilen Zustandes, Haltezeit tH ).
Der Komparatorausgang schaltet zurück auf den stationären Wert U +o max und die Spannung Us+ wird
R
nun auf den Wert U s+ = R +1 R U +o max gesetzt. In der Folgezeit tw wird der Kondensator über R1 , R2
1
2
bis auf Null entladen (Bild 7.7) und es fließt kein Strom mehr durch den Kondensator. Damit wird
die Mitkopplung unwirksam und auch die Spannung Us+ am nichtinvertierenden Eingang des OPV
nimmt wieder ihren stationären Wert Us+ = 0 an (Wiederbereitschaftszeit tw ). Ein erneuter Triggerimpuls bewirkt den gleichen Zeitablauf.
Die Zeitkonstante für beide Ladevorgänge ist näherungsweise gleich $ auf = $ ent = C (R 1 + R 2 ) . Es ist:
t H = C (R 1 + R 2 ) ln
U o−max − U +o max
R1
,
R1 + R2
UR
t w = C (R 1 + R 2 ) ln
UR
.
U +o max
Die relativ große Wiederbereitschftszeit tw kann mit einer Dioden-Hilfsschaltung reduziert werden.
R
Die Spannung Us+ wird jetzt beim Umschalten näherungsweise auf den Wert U &s+ = R +1 R U F
gesetzt und die Entladung des Kondensators auf Null erfolgt nun wesentlich schneller.
1
2
{ Bei positiver Vorspannung UR und negativem Triggerimpuls Ui erzeugt die Schaltung einen
positiven Ausgangsimpuls. Gleichzeitig muß die Diode D umgepolt werden.
7. Signalgeneratoren
7.3.
129
Retriggerbare Monoflops
Im Monoflop nach Bild 7.7 wird die quasistabile Phase von der aktiven Flanke des ersten Impulses
ausgelöst. Weitere Impulse innerhalb der Haltezeit tH bleiben wirkungslos. Soll die Haltezeit tH erst
vom letzten Impuls einer Impulsgruppe an gerechnet werden, so müssen retriggerbare Monoflops
eingesetzt werden (Bild 7.8):
{ Jeder ankommende Impuls am Triggereingang setzt jetzt das retriggerbare Monoflop in den
quasistabilen Zustand zurück bzw. hält es in diesem Zustand. Der Ausgang schaltet damit erst
um die Haltezeit tH verzögert nach dem letzten Impuls einer Impulsgruppe in den stabilen
Ruhezustand zurück.
UCC
Ue
UCC
R
RB
-
+
+
-
Uo
R1
U*
s+
UC
tH
UC
Ue
R2
Uo
Uv > 0
Bild 7.8: Retriggerbares Monoflop mit OPV-Komparator
Bild 7.9 zeigt ein retriggerbares Monoflop mit dem Timer-Schaltkreis 555. Er enthält intern einen
Hysterese-Komparator (Präzisions-Schmitt-Trigger), bestehend aus zwei Analokomparatoren und
einem RS-Flipflop, sowie einen Kettenleiter zur Festlegung der Schwellspannungen (Bild 7.10).
Zur Entladung des Kondensators C muß ein externer Transistor T verwendet werden.
Ue
UCC
8
R1
RB
T
Ue
C
5
6
2
t
U2
3
U5
OUT
555
U3
tH
t
1
U - Control Voltage (2/3 U CC)
5
Bild 7.9: Retriggerbares Monoflop mit Timer-Schaltkreis 555
t
130
7. Signalgeneratoren
Bei gesperrtem Transistor T lädt sich der Kondensator C in Bild 7.9 über R1 ggf. bis auf UCC auf.
Erreicht die Kondensatorspannung UC den Wert UC > U 5 = 23 U CC , so wird das innere Flipflop des
Schaltkreises auf Q = H gesetzt und damit der Ausgang OUT auf tiefes Potential U3 = L geschaltet.
Wird nun der Transistor T über einen positiven Triggerimpuls Ue leitend gesteuert, so entlädt sich
der Kondensator C und die Spannung U2 = U6 sinkt unter die Triggerschwelle U 2T = 13 U CC des
Schaltkreises ab. Jetzt wird das innere Flipflop auf Q = L zurückgesetzt und Ausgang OUT geht auf
hohes Potential U3 = H.
Jeder weitere Triggerimpuls am Eingang innerhalb der Haltezeit tH stellt diesen Anfangszustand
des quasistabilen Zustandes wieder her. Mit den spezifischen Werten für die Schaltschwellen des
Schaltkreises ergibt sich die Haltezeit tH näherungsweise zu t H = C . R 1 ln 3 .
Weitere Schaltungen mit dem Schaltkreis 555 sind im Script: Digitale Schaltungen angegeben.
V+
8
THRESHOLD
CONTROL
VOLTAGE
6
4
R
≥1
R
5
3
7
R
TRIGGER
R
OUTPUT
DISCHARGE
≥1
S
2
RESET
Q
555
1
GND
Bild 7.10: Timer-Schaltkreis 555
Einige typische Daten (LM 555):
Versorgungsspannung
UCC = (4,5 ... 16) V
Ausgangsspannung
U3L = 0,3 V
U3H = UCC - 1,7 V bei | I3 | = 100 mA
Ausgangsstrom
I3zul < 200 mA
Schwellwerte bei UCC = 15 V:
{
Triggerschwelle
U2T = 5,02 V
{
Schaltschwelle
U6T = 10,02 V
{ Rückschwelle
Dynamische Kennwerte:
{ Anstiegszeit
{
Abfallzeit
U4T = 0,56 V
tr
= 90 ns
tf
= 70 ns
Im RESET- Zustand liegt der Ausgang (Pin 3) auf L-Pegel und der Entladetransistor ist gesättigt.
7. Signalgeneratoren
7.4
131
Programmierbare Funktionsgeneratoren
Zur Erzeugung komplexer analoger Kurvenformen finden programmierbare Funktionsgeneratoren
in vielfältiger Weise Anwendung. Dabei können einzelne Kennwerte der Funktionen, z. B.
Amplitude und Frequenz, elektronisch eingestellt und somit über ein Rechnerprogramm gesteuert
werden. Diese Funktionsgeneratoren arbeiten intern mit Generatoren nach den o.g. Prinzipien.
Meist werden nur wenige zusätzliche Bauelemente für eine komplette Schaltung benötigt. Typisch
kann man bei diesen Schaltkreisen die gewünschte Ausgangssignalform auswählen und deren
Frequenz und Tastverhältnis programmieren. Oft verfügen die Schaltkreise noch über eine Reihe
von Zusatzfunktionen, die insbesondere ein einfaches Interface zu einem Rechner und/oder die
zeitliche Synchronisation mit anderen Einheiten ermöglichen.
Andere Lösungen verwenden z. B. Digital-Analog-Umsetzer zur Steuerung eines Integratorstromes
und damit von Anstieg und Dauer einer Rampe. Meist werden dabei sogenannte multiplizierende
DA-Umsetzer eingesetzt. Sie enthalten ein R-2R-Widerstandsnetzwerk und die Analogschalter mit
zugehöriger Steuerschaltung. Die Referenzspannung URef kann in weiten Grenzen gewählt bzw.
sogar zeitlinear gesteuert werden. Der DAU hat typisch einen Stromausgang IA (und IB ), dessen
Größe digital eingestellt werden kann. Die Koeffizienten ai der Digitalzahl Z nehmen nur die Werte
0 oder 1 an (Schalterstellung).
IA = Z .
U Ref
R
mit Z = a n−1 2 n−1 + a n−2 2 n−2 + ... + a 1 2 1 + a 0 2 0
R
U
Ref
R
2R
Bit
1
R
2R
2
R
2R
3
R
2R
4
R
2R
5
2R
6
1 µA
2R
..........
2R
10
LSB
typischer Wert
R = 10 k Ω
MSB
IB
IA
R
multiplizierender DAU
+
UA = - R IA
Bild 7.10: Prinzip eines multiplizierenden Digital-Analog-Umsetzers
Die Integration kann auch digital mit Zählern realisiert werden. Für sehr niedrige Signalfrequenzen
sind diese digitalen Lösungen den analogen Signalgeneratoren überlegen, da analoge Integratoren
wegen der Fehlströme der OPV immer in ihrer Integrationszeit begrenzt werden müssen.
Diese gemischt analog-digitalen Schaltungen haben aber auch Nachteile, die selbst bei hohem
Aufwand die Genauigkeit der Ausgangsfunktion begrenzen. Prinzipbedingt erfolgt eine stufenweise
Annäherung an die gewünschte glatte Signalkurve. Erst bei genügend vielen Treppenstufen wird
der Signalverlauf hinreichend glatt. Beim Umschalten der digitalen Eingangsinformation kommt es
zu sogenannten Glitches, die auf das Analogsignal übersprechen.
132
7. Signalgeneratoren
7.4.1
Funktionsgenerator mit verschiedenen Ausgangssignalen
Präzise Dreieck-, Sinus-, Rechteck- oder Puls-Signale mit in weiten Grenzen programmierbarem
Frequenzbereich lassen sich z. B. mit dem Schaltkreis MAX 038 realisieren (Bild 7.12).
Die gewünschte Ausgangssignalform wird durch eine digitale 2-Bit-Adresse an den Eingängen A0
und A1 ausgewählt und über einen internen Analogmultiplexer an den Ausgang OUT gelegt.
{ Dabei können Frequenz (0,1 Hz ... 20 MHz) und Tastverhältnis (10% ... 90%) unabhängig
voneinander über Strom, Spannung oder einen Widerstand eingestellt werden. Mit Hilfe des
internen Phasendetektors und Ausgang SYNC kann außerdem eine einfache Synchronisation
mit externen Taktsignalen erfolgen.
Die Frequenz des Ausgangssignals wird durch die Kapazität CF (und die Streukapazität CS) am
Anschluß COSC, die Spannung am Anschluß FADJ und durch den am Eingang IIN eingespeisten
Strom bestimmt. Für die Frequenz der Grundwelle (Anschluß FADJ liegt auf 0 V) gilt nach den
Angaben des Herstellers folgende zugeschnittene Größengleichung
f o [MHz ] =
I IN [A ]
C F& [pF ]
mit C &F = C F + C S .
4
3
A
0
Dreieck
5 COSC
Cf
6 GND
8
FADJ
7 DADJ
10
Rf
RD
Oszillator A
B
RIN
SQ
Uv
K
MUX
OUT 19
Ausgangsverstärker
1
SYNC
K
14
2
PDO
Phasendetektor
PDI
12
13
Referenz
2,5 V
20 V17 V+
2,11 GND
9,18
+
TR
+
1 REF
-5V
+5V
SIN
-
Stromgenerator
IIN
Sinusformung
A1
- 250 µA
DGND
15
Stromversorgung
für Komparator K 2
DV+
16
+ 5V
Bild 7.12: Funktionsgenerator mit verschiedenen Ausgangssignalen, [MAX 038, Blockschaltbild]
(Quelle: MAXIM, SE)
7. Signalgeneratoren
7.4.2
133
Funktionsgeneratoren mit Digtal-Analog-Umsetzern
Nachfolgend werden einige Funktionsgeneratoren mit DA-Umsetzern angegeben. Sie sollen den
Einsatz von OPV und Komparatoren in z. T. hochaktuellen schaltungstechnischen Lösungen, z. B.
in Grafik-Displaysystemen, demonstrieren, ohne diese hier im einzelnen zu diskutieren.
Sinus-Funktionsgenerator
Eine technisch einfache Lösung für einen SINUS-Funktionsgenerator unter Verwendung von ROM,
Dualzähler und DA-Umsetzer zeigt Bild 7.13. Der ROM-Inhalt bestimmt die Ausgangsspannung
des DAU, während die Andreßauswahl über den vorgeschalteten Zähler erfolgt. Die Frequenz des
Ausgangssignals wird im wesentlichen von der Taktfrequenz und der Anzahl von Speicherworten
für das Signal festgelegt. Das MSB des Zählers entscheidet über das Vorzeichen.
{ Bei symmetrischen Kurvenformen kann der Speicherbedarf z.T. drastisch reduziert werden,
indem bekannte arithmetische Umformungen benutzt werden, z. B. für die Sinusfunktion
90° < [180°:
180° < [270°:
270° < [360°:
|sin | = |sin (180°- ) |
|sin | = |sin ( -180°) |
|sin | = |sin (360°- ) |.
Diese arithmetischen Umformungen werden in der angegebenen Prinzipschaltung mit ADDIERER
und EXOR realisiert. Bei Einsatz eines Vorwärts-/Rückwärtszählers kann auf diese Elemente
verzichtet werden, wenn beim Abwärtszählen das negative Vorzeichen erzeugt wird.
Vorteilhaft an der Lösung ist, daß sie eine einfache Änderung der Amplitude (Referenzspannung)
und des Phasenwinkels α ermöglicht. Einschränkungen für die Anwendung ergeben sich dadurch,
daß nur bei sehr niedrigen Signalfrequenzen eine hohe Genauigkeit erzielt wird, eine stufenweise
Annäherung an eine glatte Signalkurve erfolgt und ggf. Glitches beim Umschalten der digitalen
Eingangsinformation auftreten.
R
URef
REF
MSB
RFB
DAU
IA
+
UDAU
1
2R
R
+
UA
9
U = ± UDAU
A
ROM
8
ADDIERER
8
arithmetische
Umformungen
EXOR
MSB
fT
2 10 - ZÄHLER
Bild 7.13: ROM-Funktionsgenerator für Sinuskurven
MSB - Vorzeichen
MSB-1 - arithmetische Operation,
hier Subtraktion
134
7. Signalgeneratoren
Funktionsgenerator mit einfachem Interpolationsverfahren
Das sogenannte einfache Interpolationsverfahren verwendet zwei DAU, deren Referenzspannungen
aus zueinander negierten Sägezahnfunktionen bestehen (Bild 7.14):
U R1 = −U max (1 − Tt ) und U R2 = −U max Tt .
UR1
T
2T
DAU 1
t
-U m
UR1
T 2T
t
UR2
IA
+
UA
Z1
Daten Z 1 , Z2
UR2
RFB
REF
Z2
IA
REF
RFB
- Um
DAU 2
offen
Bild 7.14: Funktionsgenerator mit einfacher Interpolation (Sägezahn)
Die Ausgangsspannung UA des Funktionsgenerators ist eine zeitlineare Funktion
U A = U max Z 1 (1 − t ) + Z 2 t
T
T
.
Anfangs- und Endwert werden durch die binären Eingangswerte Z1 und Z2 vorgegeben. DAU 1
bestimmt den Anfangspunkt der Geraden (UAO = Z1 Umax ), während über DAU 2 der Endpunkt der
Geraden festgelegt wird (UAE ):
U A = U A0 + U AE = Z 1 U max + (Z 2 − Z 1 ) Tt U max .
Für das nächste Geradenstück wird DAU 1 mit dem Wert Z2 (neuer Anfangswert = alter Endwert)
geladen. DAU 2 erhält den neuen Endwert.
{ DAU 1 und DAU 2 enthalten so im Prinzip die gleichen Digitalwerte, jeweils um genau eine
Taktperiode T verschoben.
Als Zwischenspeicher für die Werte Z1 und Z2 wird vorteilhaft ein FIFO -Register verwendet, das
vom Prozessor schnell geladen werden kann. Für diese Anwendung werden DAU mit internen
FIFO-Registern als Schaltkreise angeboten.
Beispiel:
12-Bit-DAU AD 7544, ein Vierfach-DAU mit 6 x 12-Bit-Registern.
{ Ein Nachteil dieses Prinzips der einfachen Interpolation sind die ggf. auftretenden Glitches
beim Wechsel des Datenwortes.
7. Signalgeneratoren
135
Funktionsgenerator mit verbesserter Interpolationstechnik
Das Auftreten von Glitches beim Wechsel der Digitalinformation wird recht zuverlässig verhindert,
wenn die Zuordnung der DAU zu den Anfangs- und Endwerten nach einem Bocksprungverfahren
ständig geändert wird. Die Referenzspannung muß dafür als Dreieckspannung realisiert werden.
Man nennt dieses Verfahren auch natürliches Abtasten (Bild 7.15).
{ Der Wechsel der Digitalinformation erfolgt jetzt im Nulldurchgang des Referenzsignales.
Damit wird das Auftreten von Glitches zuverlässig verhindert. Es wird immer nur ein DAU
neu geladen. Gleichzeitig halbiert sich der benötigte Speicherplatz, da die Informationen
nicht doppelt abgespeichert werden.
UR1
DAU 1
Um
U R1
RFB
REF
IA
+
t
T
-
Z1
Daten Z 1 , Z2
UR2
Um
U A= - R F ( I A1 + I A2 )
Z2
U
R2
UA
IA
REF
t
RFB
DAU 2
offen
- IA1
t
- IA2
t
S2
U
A
S4
S7
S3
S1
S5
S8
S6
t
S1
0
S3
S2
S7
S5
S4
S6
S8
Z1
Z2
Bild 7.15: Funktionsgenerator mit Dreieck-Abtastung (Quelle: Analog Devices)
Für Grafik-Displaysysteme müssen die Referenzspannungen der DAU in ihrer Frequenz steuerbar
sein, da sonst starke Helligkeitsunterschiede beim Zeichnen von langen und kurzen Vektoren
entstehen.
f i L = (XE − X A ) 2 + (Y E − Y A ) 2 .
136
7. Signalgeneratoren
Programmierbarer Sägezahngenerator
OPV 1 in Bild 7.16 arbeitet als Integrator und erzeugt die Rampe, OPV 2 erzeugt das invertierte
Signal. Der Komparator setzt den Integrator zurück, wenn die Spitzenspannung Um = Umax erreicht
ist und schiebt das interne FIFO-Register weiter. Das Monoflop liefert einen Austastimpuls für das
Videosignal, um die oben erwähnten Spannungsspitzen (Glitches) zu unterdrücken.
DAU
- UR
IA
REF
IB
RFB
+
+
+
OPV 1
Um
Z
OPV 2
Komparator
zu FIFO
CT
DAU vom Typ AD 7544
Austastimpuls
Monoflop
Bild 7.16: Programmierbarer Sägezahngenerator mit DAU (Quelle: Analog Devices)
Programmierbarer Dreieck-Generator
Der programmierbare Dreieckgenerator nach Bild 7.17 verwendet für jede Flanke des Signals einen
eigenen DAU (Frequenzsteuerung). Die Eingangsinformation wird immer dann übernommen, wenn
der andere DAU den Integrator ansteuert (Einschwingzeit, Störunterdrückung). Die Komparatoren
erzeugen wieder die Steuersignale für die internen FIFO-Register der beiden DA-Umsetzer.
-
DAU 1
- Um
IA
+
REF
OPV 2
RFB
Daten
Z1 , Z 2
+ Um
Z1
steigend
-
Z2
fallend
+
OPV 1
REF
RFB
DAU 2
offen
DAU vom Typ AD 7544
IA
Um
+
Komparator 1
+
Komparator 2
SteuerLogik
Bild 7.17: Programmierbarer Dreieckgenerator mit DAU (Quelle:Analog Devices)
zu FIFO
8. Nichtlineare Verstärkerschaltungen mit OPV
8
137
Nichtlineare Verstärkerschaltungen mit OPV
Nichtlineare Funktionen werden bei analoger Signalverarbeitung z. B. zur Multiplikation, Division,
Gleichrichtung und Modulation, aber auch zur Signalformung und Signalkorrektur benötigt. Die
nichtlinearen Zusammenhänge sind technisch meist nur in stark eingeschränkten Arbeitsbereichen
und ungenauer realisierbar als lineare Beziehungen. Bzgl. des statischen Übertragungsverhaltens
wird zwischen stetigen und unstetigen nichtlinearen Funktionseinheiten unterschieden.
{ In stetigen nichtlinearen Schaltungen wird fast ausnahmslos das Kleinsignalverhalten von
Halbleiterbauelementen ausgenutzt. In unstetigen nichtlinearen Schaltungen dagegen kommt
das Großsignalverhalten von Dioden, Bipolartransistoren, FET usw. zur Wirkung.
8.1
Stetig nichtlineare Verstärkerschaltungen
Insgesamt ist die Bedeutung stetiger nichtlinearer Verstärkerschaltungen mit analogen Elementen
stark zurückgegangen. Die nichtlinearen Beziehungen werden zunehmend mit programmierbaren
digitalen Schaltungen realisiert. Nachfolgend wird deshalb nur das Prinzip einer stetig nichtlinearen
Verstärkerschaltung an zwei Beispielen dargestellt.
Logarithmusfunktion
Zur Realisierung wird ein Schaltungselement mit exponentieller I/U-Kennlinie (z. B. Diode,
Transistor) in die Rückführung eines OPV geschaltet wird (Bild 8.1 a). Im Summierknoten gilt:
U BE
U1
= I C0 (e U T − 1) mit U T = kqT l 26 mV (UT - Temperaturspannung)
R1
I1 = IC ,
Uo
−
U BE
U1
U
Für U >> 1 gilt wegen UO = - UBE : R I = e T
T
1 C0
U
und damit U o = −U T ln R I1 .
1 C0
Exponentielle Verstärkerschaltung
Mit den grundsätzlich gleichen Betrachtungen wie oben folgt nach Bild 8.1 b):
U1
−
U o = R o I C0 e U T .
R1
Ic
Ic
I1
Ro
U BE
U1
Io
+
a) Logarithmischer Verstärker
U1
Uo
+
b) Exponentieller Verstärker
Bild 8.1: Stetig nichtlineare Verstärkerschaltungen
Uo
138
8.2
8. Nichtlineare Verstärkerschaltungen mit OPV
Unstetig nichtlineare Verstärkerschaltungen
Die wichtigsten Elemente zur Realisierung unstetig nichtlinearer Schaltungen sind die ideale
Diode, idealer FET, Analogschalter als Strom- bzw. Spannungsschalter und Analogkomparatoren
mit und ohne Hysterese. Analogkomparatoren werden wegen ihrer großen praktischen Bedeutung
in einem eigenen Abschnitt (6) behandelt.
8.2.1
Ideale Diode
Die Realisierung einer sogenannten idealen Diode gelingt mit einer Schaltung nach Bild 8.2. Beide
gezeigten Schaltungen können als geschaltete Spannungsquellen betrachtet werden. Wesentliches
Merkmal ist eine Halbleiterdiode D1 als nichtlineares Element im Gegenkopplungskreis der OPV.
Die Flußspannung der Diode wird infolge der Gegenkopplung um die Leerlaufverstärkung V0 des
OPV unterdrückt und die Übertragungskennlinie hebt fast ideal im Koordinatenursprung von der
Abszisse ab. Für die auf den Eingang bezogenen Schwellspannungen der beiden Schaltungen gilt:
U &S =
U F1
U 2R 2 + R 1
bzw. U &S l VF1
(für V0 > 10 4 ... 10 5 typisch im µV-Bereich).
V0
R1
0
Legende zu Bild 8.2 a):
U
Bei positiven Eingangsspannungen U 1 m VF1 wird die Diode D1 leitend und die Schaltung arbeitet
0
als Spannungsfolger. Bei negativen Eingangsspannungen dagegen sperrt die Diode D1 und die
Ausgangsspannung liegt bei passiver geerdeter Last RL auf fast Null. Fehler am Ausgang werden
vor allem durch die Diodensperrströme und den Eingangsstrom des OPV hervorgerufen.
V
U
U
Für die Ausgangsspannung gilt U 0 = 1 + 0V (U 1 − VF1 ) l U 1 − VF1 .
0
0
0
UF1
Vo
+
U*
o
U1
Uo
D
1
RL
Uo
U1
UF1
Vo
a) ideale Diode, nichtinvertierend
U
1
U
2
R2
R1
R1
D2
D1
Vo
+
U*
o
b) ideale Diode, invertierend
Bild 8.2: Ideale Diode
- Uo
U*
o
Uo
RL
UF2
U F1
Vo
Uo
U1+ U2
8. Nichtlineare Verstärkerschaltungen mit OPV
139
Legende zu Bild 8.2 b)
Für Eingangsspannungen U1 + U2 > 0 wird die Ausgangsspannung des OPV U &o < 0 . Diode D1 ist
leitend, Diode D2 gesperrt und die Schaltung arbeitet als invertierender Verstärker bzw. Summierer.
Aus der Knotengleichung für den invertierenden Eingang des OPV
U 1 − U s− U 2 − U s− U o − U s−
+
+
=0
R1
R1
R2
erhält man mit
U o = U F1 + U &o und U &o = −V 0 U s− (OPV-Modell)
für die Ausgangsspannung Uo der Schaltung
Uo = −
R2 (
U 2R 2 + R 1
U + U 2 ) − F1
R1 1
V0
R1
1
.
2 R2 + R1
1+ V R
0 1
Für Eingangsspannungen U1 + U2 < 0 geht die Ausgangsspannung U &o des OPV nach positiven
Werten, damit wird Diode D2 leitend und Diode D1 gesperrt. Wegen der Gegenkopplung über die
leitende Diode D2 liegt der invertierende Eingang virtuell auf Null. Die Ausgangsspannung U &o
wird damit auf die Flußspannung UF2 der Diode D2 begrenzt und es gilt 0 < U &o [ U F2 . Ist eine
passive geerdete Last RL angeschaltet, dann ist auch die Ausgangsspannung Uo = 0.
{ Die nichtinvertierende ideale Diode findet z.B. Anwendung zur Extremwertauswahl.
{ Die invertierende ideale Diode wird u.a. in Präzisionsgleichrichtern, in Schaltungen zur
Betragsbildung sowie zur Realisierung einfacher nichtlinearer regelungstechnischer Glieder
wie Begrenzung und Totzone eingesetzt.
Bild 8.3 zeigt eine Schaltung zur Betragsbildung bzw. Zweiweggleichrichtung bei geerdeter Last.
Für die Ausgangsspannung Uo dieser Schaltung gilt
bzw.
− U 1 für U 1 > 0
U o = − (2 U &1 + U 1 ) mit U &1 =
0 für U 1 [ 0
U o = − (2 U &1 + U 1 ) = U 1 .
R1
R1
Uo
+
U1
D2
D1
R2
U*
1
2 R2
-
2 R2
+
Bild 8.3: OPV-Schaltung zur Betragsbildung
Uo
U1
Uo = | U1|
140
8.2.2
8. Nichtlineare Verstärkerschaltungen mit OPV
Begrenzung und Totzone
Begrenzung und Totzone sind u.a. in der Regelungstechnik benötigte Funktionen. Eine multivalent
nutzbare Schaltung für Begrenzung und Totzone zeigt Bild 8.4.
Die Teilschaltungen mit OPV 1 und OPV 2 entsprechen der Schaltung einer idealen Diode nach
Bild 8.2 b). Die Teilschaltung mit OPV 3 arbeitet als invertierender Summierer für die Größen Uo1
und Uo2 und man erhält die Nachbildung einer Totzone (Übertragungskennlinie in Bild 8.4) mit
U o = U o3 = −
R3
(U o1 + U o2 ) .
R2
Mit dem zusätzlichen Widerstand R2 (in Bild 8.4 gestrichelt) erhält man eine Begrenzerschaltung.
R
{ Im Bereich -U2 < Ue < U1 ergibt sich dabei eine lineare Übertragung U &o3 = − R 3 U e .
2
{ Erreicht die Eingangsspannung Ue den Wert der Vergleichsspannung U1 bzw. U2 , so wird
ein zusätzlicher Strom in den Ausgangsverstärker OPV 3 getrieben, der die Wirkung von Ue
so weit reduziert, daß die Ausgangsspannung konstant bleibt.
U &o3 = −
R3
R
U bzw. U &o3 = 3 U 2 .
R2 1
R2
R1
- U1
R1
R0
+
Ue
R1
R1
+ U2
R3
R2
D1 Uo1
R2
-
R0
+
U o2
1
D2
+
3
Uo3
R2
2
Uo2
Uoi
Begrenzer
U1
Ue
- U2
U o1
U o3
Totzone
- U2
U1
U*
o
Bild 8.4: Schaltung und Übertragungskennlinien für Begrenzer und Totzone
Ue
8. Nichtlineare Verstärkerschaltungen mit OPV
8.2.3
141
Extremwertauswahlschaltungen
Zwei Schaltungen zur Extremwertauswahl (Minimum, Maximum) zeigt Bild 8.5. Dabei wird als
Vergleichsspannung an allen OPV die Ausgangsspannung selbst verwendet Us- = Uo . Die einzelnen
Teilschaltungen entsprechen der nichtinvertierenden idealen Diode nach Bild 8.2 a).
Maximumauswahl (Bild 8.5 a)
Wird eine Eingangsspannung Ui > Uo , so nimmt die Ausgangsspannung Uo diesen Wert U &o = Ui
an. Die entsprechende Diode Di ist leitend, die Teilschaltung arbeitet als Spannungsfolger. Für eine
Eingangsspannung Uj > Ui gilt dann U &&
o = Uj , damit wird Diode Di gesperrt und dafür Diode Dj
leitend.
Minimumauswahl (Bild 8.5 b)
Die Minimumauswahlschaltung entsteht aus der Maximumschaltung durch Umpolung aller Dioden
und der Versorgungsspannung. Die Wirkungsweise kann analog erklärt werden.
{ Die Ausgangsspannung Uo folgt somit stets der maximalen / minimalen Eingangsspannung.
Für beide Schaltungen werden OPV mit übersteuerungsfesten Eingangsstufen benötigt.
-
+
U1
+
U1
-
U2
+
:
:
:
-
Un
+
U2
+
Uo
R
+
Un
Uo
R
- U CC
+ U CC
U
U
Uo
U2
U1
U2
Un
Uo
Un
a)
t
t
U1
Uo = max ( U1, U 2 , ... , U n )
Bild 8.5: OPV-Schaltungen zur Extremwertauswahl
b)
Uo = min ( U1, U2 , ... , U n )
142
8.2.4
8. Nichtlineare Verstärkerschaltungen mit OPV
Geschaltete Stromquelle, idealer FET
Die schaltungstechnischen Lösungen für geschaltete Stromquellen lassen sich weitgehend auf die
Schaltungen von Konstant-Stromquellen mit OPV zurückführen (vgl. Abschnitt 5). Bild 8.6 zeigt
eine entsprechende Schaltung mit OPV und FET. Bei idealem OPV und durchgesteuertem FET gilt
IL =
Uo − UR
.
R
{ Der Strom IL läßt sich ein- bzw. ausschalten, wenn die Eingangsspannung U1 größer bzw.
kleiner als die Referenzspannung UR wird.
+
IL
U1
+
V
- o
IL
UR = 0
U R> 0
Ua
UGS
Uo
R
U*
R
U1
UR
Bild 8.6: Unipolarer Stromschalter mit OPV und FET
Bei endlicher Leerlaufverstärkung V0 des OPV mit einem Ausgangswiderstand ra = 0 gilt für die
Ausgangsspannung Ua des OPV
Ua = V0 (U1 - Uo ) = UGS + Uo
und damit für die Ausgangsspannung Uo der Schaltung
Uo = U1 −
U 1 + U GS
.
1 + V0
Für den Strom IL folgt daraus
IL =
Uo − UR
U + U GS 1
= U1 − UR − 1
R
1 + V0 R
U
für U 1 m U R (1 + 1 ) + GS = U &R .
V0
V0
{ Die Schaltung kann auch als idealer FET mit einer Öffnungs- bzw. Schwellspannung
U
U &GS = GS l 0 bezeichnet werden (Kennlinie in Bild 8.6).
V
0
Der geschaltete Strom IL der Schaltung in Bild 8.6 kann nur in einer Richtung fließen (unipolar).
Für bipolare Ströme und/oder geerdete Lasten können modifizierte Stromquellenschaltungen nach
Abschnitt 5.3 verwendet werden.
8. Nichtlineare Verstärkerschaltungen mit OPV
8.3
143
Analogschalter
Analogschalter werden in der modernen Elektronik vor allem zur Modulation von Signalen und zur
Signaltastung benötigt. Die beiden Aufgaben unterscheiden sich im Verwendungszweck der
rheolinearen Signale und im Verhältnis von Tastdauer T & zur Tastperiode T0 .
{ Die Signalmodulation ermöglicht u.a. die Transformation niederfrequenter Signale und deren
driftarme Verstärkung (Zerhacker-, Chopperverstärker). Für die Tastdauer gilt T & l 12 T 0 .
{ Die Signaltastung erlaubt die Anwendung des Zeit-Multiplex-Prinzips zur Signalübertragung.
Damit ist u.a. die Mehrfachnutzung von Übertragungskanälen möglich, z. B. die serielle
Eingabe von Analogsignalen mehrerer Meßstellen über einen Analog-Digital-Wandler in
einen Rechner. Für die Tastdauer gilt hier T & << T 0 .
U(t)
+E
U o (t) - Ausgangssignal
Ust (t)
U e (t) - Eingangssignal
Ust (t) - Steuersignal mit
T*
-E
T0
2T0
t
Uo (t)
Ue (t)
|Û | > | Û e |
st
T 0 - Tastperiode
T* - Tastdauer
Bild 8.7: Typische Signalverläufe an einem Analogschalter
Das Schalten analoger Signale mit hoher Geschwindigkeit bei gleichzeitig guter Genauigkeit ist
wesentlich schwieriger zu realisieren, als das Schalten digitaler Signale. Ein Analogschalter soll ein
analoges Signal in Abhängigkeit eines Steuersignals möglichst genau in Amplitude und Signalform
übertragen bzw. sperren. Insbesondere bei kleinen Gleichspannungen und -strömen im mV- bzw.
µA-Bereich sind die Fehlereinflüsse durch Offset- und Driftgrößen der Schaltungselemente sowie
Thermospannungen erheblich. Bezogen auf die zu schaltende elektrische Größe unterscheidet man
zwischen Spannungsschaltern und Stromschaltern.
Zur Realisierung von Analogschaltern werden vor allem Dioden, bipolare Transistoren und FET
eingesetzt. Dabei sind Offset- und Driftspannungen, Durchlaß- und Sperrwiderstand, Restströme
sowie parasitäre Kapazitäten der Bauelemente für die Schaltfehler von Bedeutung. In der Praxis
werden wegen ihrer spezifischen Eigenschaften FET- und CMOS-Analogschalter bevorzugt.
FET realisieren eine gute Isolation zwischen der Steuerelektrode (Gate) und der Schaltstrecke
Drain-Source, dem analogen Signalpfad. FET- und CMOS-Schalter können Signale bidirektional
übertragen; im eingeschalteten Zustand tritt keine Offsetspannung auf und es können somit auch
sehr kleine Spannungen geschaltet werden. Sie benötigen keine Steuerleistung und verfügen über
r
ein sehr gutes Schaltverhältnis der wirksamen Widerstände roff
> 10 6 .
on
{ Für sehr schnelle Analogschalter werden meist Brückenschaltungen mit Schottky-Dioden
eingesetzt.
144
8. Nichtlineare Verstärkerschaltungen mit OPV
8.3.1
Analogschalter mit Diodenbrücken
Zu den universellsten Analogschaltern gehören die Vier- und die Sechsdiodenbrücke (Bild 8.8). Sie
können sowohl für kleine als auch große Schalterspannungen, -ströme und -leistungen eingesetzt
werden (Kenn- und Grenzwerte der Bauelemente beachten). Für hohe Genauigkeitsanforderungen
müssen die Dioden der Brückenschaltung nahezu gleiche Kennwerte haben (Integrationstechnik).
Rv
Uo
U1
R
D1
R
Ust
Uo
Ue
D2
D3
R
D3
I
a) Vierdiodenbrücke
D5
D4
D1
-Ust
D2
+
D4
Ust
I U1
U2
D6
L
-Ust
b) Sechsdiodenbrücke
Bild 8.8: Diodenbrücken als Analogschalter
Vierdiodenbrücke
In der Vierdiodenbrücke (Bild 8.8 a) werden die Dioden D2 , D3 mit der Steuerspannung Ust (t) in
den leitenden oder gesperrten Zustand gesteuert. Wegen |Ust | > |U1 | sind bei positiver Spannung Ust
damit alle vier Dioden gesperrt und es gilt Uo (t) = U1 (t), solange keine Last angeschaltet ist. Für
negative Steuerspannungen dagegen werden die Dioden D2 , D3 leitend und so die Dioden D1 , D4
auf die Flußspannung ± UF vorgespannt. Unabhängig von der Signalspannung U1 gilt jetzt für die
Ausgangsspannung Uo = 0.
Sechsdiodenbrücke
In der Vierdiodenbrücke schaltet die Steuerspannung Ust die Dioden selbst in den leitenden
Zustand, das beschränkt sowohl die Schaltgenauigkeit infolge unvermeidlicher Umschaltfehler als
auch die Schaltgeschwindigkeit (Spannungsschaltermode). In der Sechsdiodenbrücke dagegen
werden die Dioden D1 , ..., D4 durch die Stromquellen I in einen abgeglichenen leitenden Zustand
gesteuert. Die Polarität der Steuerspannung Ust entscheidet, ob der Strom I durch die Brückenzweige fließt oder abgezogen wird (Stromschaltermode, gute Dynamik).
Für negativen Steuerimpuls Ust sind die Dioden D5 , D6 leitend und saugen den Strom I praktisch
ab. Die Brückendioden D1 , ..., D4 sind auf U1 < 0 bzw. U2 > 0 vorgespannt und damit gesperrt. Für
die Ausgangsspannung gilt Uo = 0 bei passiver ohmscher Last. Bei positivem Steuerimpuls Ust
dagegen sind die Dioden D5 , D6 gesperrt, aber die Dioden D1 , ..., D4 sind jetzt leitend. Aus der
Schaltung in Bild 8.8 b) folgt
U1 = Ue + UF1 , U2 = Ue - UF2 , Uo = U1 - UF4 = U2 + UF3 und damit
Uo = Ue für UF1 = UF4 , UF3 = UF2 .
{ Bei Einsatz von Schottky-Dioden können mit Diodenbrücken sehr schnelle Analogschalter
mit Schaltzeiten im ns-Bereich realisiert werden.
8. Nichtlineare Verstärkerschaltungen mit OPV
145
Approximiert man leitende Dioden mit einem Ersatzwiderstand rf und gesperrte Dioden mit rs , so
kann man für den Widerstand Rv einen optimalen Wert ermitteln, bei dem die relativen Schaltfehler
fe und fa im ein- und ausgeschalteten Zustand minimal werden. Für die Vierdiodenbrücke gilt:
EIN:
Uo
rf
=
U1 Rv + rf
U
AUS: U o = R rs+ r
1
v
s
Über den Ansatz
bzw.
fe =
rf
−0,
Rv + rf
bzw.
fa =
rs
− 1.
Rv + rs
( fe + fa )
= 0 folgt für den optimalen Arbeitswiderstand bzw. den damit
Rv
erreichbaren relativen Schaltfehler
R v opt =
rf . rs
bzw.
fe = fa =
rf
rs .
r
{ Ein Schaltfehler f [ 10 -3 erfordert danach Dioden mit einem Schaltverhältnis rsf m 10 6 . Bei
erhöhten dynamischen Anforderungen ist der Widerstand Rv kleiner zu wählen.
Schaltet man die angegebenen Analogschalter in den Gegenkopplungskreis eines OPV, so können
auch Ausgangsspannungen Uo > Ue erreicht werden. Wie bei den Konstantspannungsquellen mit
erhöhtem Ausgangsstrom (Abschnitt 5.2.3) werden gleichzeitig evtl. wirksame rON -Widerstände
und/oder Offsetspannungen in ihrem Einfluß um den Faktor der Schleifenverstärkung unterdrückt.
Bild 8.9 zeigt die OPV-Schaltung eines symmetrischen Analogschalters mit Vierdiodenbrücke.
+U st
Rv
R0
Ue
D1
R1
-
D4
Uv
Uo
IL
+
D
D3
D2
R
2
ZD
R
Rv
L
-U st
Bild 8.9: Symmetrischer Analogschalter mit Diodenbrücke und OPV
Die Vierdiodenbrücke erzeugt hier im Gegensatz zur Schaltung in Bild 8.8 a) für Steuerspannungen
Ust > 0 eine Ausgangsspannung Uo l Uv , für Ust < 0 schaltet sie den Ausgang auf Uo l 0.
Für Ust > 0 werden alle Brückendioden leitend. Wird nun die Spannung Uv geändert, so ändern sich
alle Potentiale in der Diodenbrücke in gleicher Weise. Die Schaltung arbeitet als invertierender
R
Verstärker, für die Ausgangsspannung gilt U o = − R 0 U e .
1
146
8. Nichtlineare Verstärkerschaltungen mit OPV
Die Dioden D und die Z-Dioden ZD bewirken auch bei Ust < 0, also abgeschalteter Diodenbrücke,
eine wirksame Gegenkopplung des OPV. Der invertierende Eingang des OPV wird virtuell weiter
auf Massepotential (Us- = 0) und so auch die Ausgangsspannung über R0 auf Uo = 0 gehalten. Eine
Übersteuerung des OPV und die damit verbundene Einschwingzeit werden so vermieden.
Ein Nachteil für verschiedene Anwendungen kann der begrenzte Ausgangsstrom IL sein, der gleich
dem Strom durch die Vorwiderstände Rv ist. Wegen der gegeneinander geschalteten Dioden D1 , D4
bzw. D2 , D3 kann vom OPV-Ausgang kein Strom direkt zum Ausgang fließen.
{ Der maximale Ausgangsstrom der Schaltung in Bild 8.9 ist somit begrenzt auf
IL <
U st − U v
.
Rv
{ Für hohe Ausgangsströme müssen die Steuerspannung möglichst groß und die Widerstände
Rv niederohmig gewählt werden.
{ Dabei ist die Belastung des OPV-Ausganges mit R &L = 12 R v zu beachten.
8.3.2
Analogschalter mit Transistoren
Ein Nachteil der Diodenbrücken besteht darin, daß Steuerspannung und Steuerstrom stets größer
sein müssen als Signalspannung und Signalstrom. Dadurch tritt eine relativ starke Beeinflussung
des Signals auf. Mit Transistorschaltern (Bild 8.10) läßt sich dieser Nachteil beheben. Die Steuerleistung wird hier wesentlich kleiner, im Falle von FET-Schaltern praktisch sogar Null; trotzdem
können für viele Anwendungen ausreichend große Schalterströme/Schalterspannungen gesteuert
werden. Der Analogschalter mit komplementären Bipolartransistoren entspricht in seiner Struktur
vollständig der Vierdiodenbrücke (Dioden-Ersatzschaltung).
U1(t)
Rv
Uo(t)
R
Uo(t)
U1(t)
R
Ust
- U st
pnp
npn
a) Brückenschalter mit bipolaren
Komplementärtransistoren
R
Ust
L
b) Analoger Schalter mit
komplementären FET
Bild 8.10: Analoge Schalter mit Transistoren
Durch Einbeziehen der Analogschalter in die Gegenkopplungsschleife eines OPV können auch mit
Transistorschaltern Schaltungen mit hervorragenden Eigenschaften erzielt werden. Entsprechende
Beispiele sind u.a. programmierbare Verstärker (Bild 4.14), geschaltete Kondensator-Netzwerke
(Bilder 4.15, 5.21) bzw. auch Digital-Analog-Umsetzer (Bild 7.10).
8. Nichtlineare Verstärkerschaltungen mit OPV
8.3.3
147
CMOS-Analogschalter
Eine CMOS-Schaltung besonderer Art und Bedeutung ist das Transmissionsglied (Analogschalter).
Ein entsprechendes Äquivalent in Bipolartechnik ist nicht bekannt. Da FET den Strom in beiden
Richtungen übertragen können (Drain und Source tauschen dabei ihre Funktion), lassen sich durch
Parallelschaltung eines n-Kanal- und eines p-Kanal-FET Torschaltungen zur bidirektionalen
Signalübertragung aufbauen (Bild 8.11).
U DD
E
T2
E
A
Z
T1
E
X1
A
1
1
Z
Schaltsymbol nach DIN
a)
CMOS-Inverter
Analogschalter
U SS
U DD
T2
E
p
A
Z
p
T3
b)
T1
n
USS
Bild 8.11: CMOS-Analogschalter, Transmissionsgatter (CD 4016)
Die Schaltung besteht aus dem Analogschalter T1 , T2 und einem CMOS-Inverter zur Ansteuerung.
Damit werden die Gate-Anschlüsse des Transmissionsgliedes stets negiert zueinander angesteuert.
High-Pegel am Eingang E öffnet direkt den n-Kanal-Transistor T1 und über den Eingangsinverter
gleichzeitig auch den p-Kanal-Transistor T2 . Zwischen den Anschlüssen A und Z entsteht eine
niederohmige Verbindung, über die sowohl analoge als auch digitale Signale bidirektional übertragen werden können. Bei Low-Pegel am Steuereingang E sperren beide Transistoren T1 und T2
und die Strecke A - Z wird hochohmig (rOFF > 109 Ω).
Im leitenden Zustand ist der Widerstand rON der Strecke A - Z stark von der Versorgungsspannung,
der Eingangsspannung sowie der Ausgangslast abhängig [rON = (0,03 ... 1,5) kΩ]. Durch Steuerung
der Substratspannung (Bulk-Anschluß) der Transistoren T1 , T2 über den zusätzlichen Transistor T3
in Bild 8.11 b) kann diese Abhängigkeit verringert werden. Nach diesem Prinzip sind z. B. die
Analogschalter CD 4016 realisiert.
148
8.3.4
8. Nichtlineare Verstärkerschaltungen mit OPV
Analogschalter im Stromschaltmode
Für viele Anwendungen ist es dynamisch besser, wenn der zu schaltende Konstantstrom IRef ständig
fließt und über Analogschalter der Strompfad geschaltet wird (Bild 8.12 a).
{ Die Spannung am Schalterausgang und so auch über dem Analogschalter bleibt bei R l R L
fast konstant und muß nicht bei jedem Schaltvorgang den vollständigen Hub (Umin ...Umax)
durchlaufen. Die zeitverzögernde Wirkung parasitärer Kapazitäten (Umladung) wird damit
stark unterdrückt.
+U
Ref
R
+
Ref
2R
Uo + U S
I Ref
S
R
2R
I Ref
2R
LSB
Uo
RL
R
R
2R
2R
I Ref
1I
2 Ref
MSB
IB
CS
Analogschalter
a) Stromschalter mit Streukapazitität
U Ref
1
I
R 2 Ref
IA
b) invertiertes R-2R-Netzwerk
Bild 8.12: Programmierbarer Stromschalter mit R-2R-Widerstandsnetzwerk
Mit Hilfe von Widerstands-Kettenleitern können auf diese Weise programmierbare Spannungs- und
Stromquellenschaltungen realisiert werden. Für dualgestufte Gewichtsfaktoren werden dazu meist
R-2R-Netzwerke eingesetzt (vgl. auch Abschnitt 4.5). Als Ausgangssignal entsteht ein Strom IA ,
dessen Wert digital programmiert werden kann. Ist eine Spannung als Ausgangssignal gewünscht,
so kann mit der bekannten invertierenden OPV-Schaltung eine einfache I/U-Wandlung erfolgen.
Mit dem sogenannten invertierten R-2R-Netzwerk (Bild 8.12 b) kann die Stromschalter-Betriebsart
realisiert werden (current mode). Die Analogschalter schalten dabei den Strom zwischen virtueller
Masseleitung A und Masseleitung B, d. h. die Zweigströme durch die 2R-Widerstände und die
Analogschalter fließen immer (gleichmäßige Verlustleistung).
Der Strom teilt sich in jedem Knoten des Kettenleiters gleichmäßig auf (duale Gewichte). Bei der in
1 ) bzw. I = 1 I .
Bild 8.12 b) angegebenen Schalterstellung gilt I A = I Ref ( 14 + 18 + 16
B
2 Ref
{ Die Spannung über den Schaltern bleibt wegen ihrer niederohmigen ron -Widerstände nahezu
Null, parasitäre Kapazitäten brauchen nicht umgeladen werden (kurze Schaltzeiten).
Vorteilhaft ist weiter, daß sowohl eine Referenzspannung URef als auch ein Referenzstrom IRef
eingesetzt werden können, die unabhängig von der Schalterstellung (Digitalzahl Z) stets die gleiche
Last RLq = R sehen.
Technische Universität Ilmenau
Fakultät für Informatik und Automatisierung
Institut für Theoretische und Technische Informatik
Fachgebiet Methodik des Hardwareentwurfs
Übungsaufgaben
zur Lehrveranstaltung
Analoge und digitale Schaltungen
von Dr.-Ing. Norbert Hirt
Teil: Analoge Schaltungen
ü1
Gegenkopplung, gegengekoppelte Verstärker
A1.1 Bestimmen Sie aus dem Signalflußbild in Bild A1.1 die Übertragungsgleichung X a = f (Xe )
des einschleifigen Regelkreises allgemein und für |Ko Fo | d ∞ .
Ko
Xr
Xe
X'e
K1
Xd
+
Fo
Xa
Bild A1.1: Einschleifiger Regelkreis
A1.2 Bestimmen Sie den Einfluß von Änderungen dF o l F o der Verstärkung Fo sowie von
Änderungen im Ein- und Gegenkopplungsnetzwerk (K1 , Ko ) auf das Ausgangssignal Xa mit Hilfe
des totalen Differentials der Grundgleichung aus Aufgabe A1.1.
A1.3 Bestimmen Sie den Einfluß von Änderungen der Leerlaufverstärkung Fo in mehrstufigen
Verstärkeranordnungen nach Bild A1.3, wenn für die Stufen-Verstärkungen gilt Fo1 = Fo2 = ... = Fon .
X
X
Vergleichen Sie die Ergebnisse bei Annahme gleicher Übertragung F 1 l F 2 (F 1 = X an , F 2 = X a2 )
e1
der beiden Systeme.
Kon
Ko1
Xe1
+
Xa1
F o1
+
Fon
e2
Ko
Xe2
X an
+
Fo1
Fon
X a2
Überallesgegenkopplung
Einzelgegenkopplung
Bild A1.3: Mehrstufige Verstärkeranordnungen
A1.4 Welche Grenzfrequenzen ergeben sich für eine gegengekoppelte Verstärkerschaltung bei
unterschiedlichem Gegenkopplungsgrad k = 1, 10, 102 , 103 , 104 ? Wie groß ist in den einzelnen
Fällen die Verstärkung Vo* des Eingangssignales? Für den Frequenzgang des Vorwärtsverstärkers
Vo
1 = 10 kHz .
gelte F o (p) = 1 + pT
mit Vo = 80 dB und f o = 2T
o
o
A1.5 Von einem Verstärker sind die beiden Knickfrequenzen fg1 = 1 kHz, fg2 = 1 MHz und die
Leerlaufverstärkung Vo = 10 5 bei niedrigen Frequenzen bekannt. Welche Kleinsignalbandbreiten
ergeben sich näherungsweise für Spannungsverstärkungen von VU1 = 10 3 und VU2 = 10 ?
Hinweis: Verwenden Sie zur Lösung die Darstellung des Frequenzganges im Bode-Diagramm.
A1.6 Eine gegengekoppelter Verstärker soll durch Frequenzgangkorrektur mit dominierendem Pol
(Lag-Kompensation) stabilisiert werden. Für den Amplitudenfrequenzgang der offenen Kette gilt
Vo
mit T1 >> T2 . Stellen Sie die Verhältnisse im Bode-Diagramm dar und
KoFo =
(
)(
)
1 + pT 1 1 + pT 2
bestimmen Sie die notwendige Zeitkonstante TK des Korrekturnetzwerkes in allgemeiner Form.
A1.7 Ein Wechselspannungsverstärker soll eine Ausgangsamplitude Ûo = 3 V haben, seine Slew
Rate beträgt Sr [ 0,2 V/µs. Bis zu welcher Frequenz wird ein Sinussignal unverzerrt übertragen und
welche Signalamplitude ergibt sich bei der doppelten Frequenz ?
ü2
Netzwerkanalyse
A2.1 Bestimmen Sie für das Netzwerk in Bild A2.1 die Knotengleichungen ( i = 0), ersetzen Sie
Ui − Uj
und ermitteln Sie die Knotenspannungen
R ij
die Zweigströme durch Ausdrücke der Form I ij =
U1 und U2 des Netzwerkes in allgemeiner Form.
A2.2 Bestimmen Sie die Admittanzmatrixgleichungen für die Netzwerke in Bild A2.1 und A2.2
und daraus die Knotenspannungen U1 und U2 (für S d ∞) . Vergleichen Sie die Gleichungssysteme.
R2
IG 1
i2
i1
R1
i3
i1
R1
R2 i
2 2
IG 1
2
R3
3
Bild A2.2
3
Bild A2.1
i3
i 23
R3
i23 = S (U1 - U3 )
A2.3 Für ein Netzwerk mit mehreren Eingangssignalen (Bild A2.3) sind die Knotenspannungen zu
ermitteln. Für die Steueradmittanz S der gesteuerten Quelle Ia = S (U2 - U1 ) gelte S d ∞ .
U a (p)
A2.4 Für das Netzwerk in Bild A2.4 sind die Übertragungsfunktion F(p) = U (p) und daraus die
e
beiden 3-dB-Frequenzen fu und fo zu bestimmen. Für die gesteuerte Quelle gilt Ia = ya Vo (U2 - U1 ).
y2
1
I e-
Ie
Ie+
y1
O
Ue
Ia
2
ya
y3
C1
1
a
Ia
re
ra
R2
R1
Ua
C2
2
3
Bild A2.4
Bild A2.3
A2.5 Für die Netzwerke in Bild A.2.5 sind die Ausgangsspannungen Uo zu ermitteln. Für die
Verstärkung Fo der gesteuerten Spannungsquelle gelte F o d ∞ .
R2 3
R1
1
R3
R3
R4
-
2
-
Ra
R1
Ra
Uo
Ue
2
R4
+
Ua
Bild A2.5
Ua = F o (U2 - U1 )
R2
+
Ua
Ue
a)
3
b)
1
Uo
U a = Fo (U3 - U 2 )
ü3
Netzwerkanalyse / Operationsverstärker
I e- , I e+
- Eingangsruheströme
U off
I
Us-
re-
erd
Us+
r e- , r e+
r
d
U'
Uoff s-
ra
U'
s+
Ua
Ie+
r e+
- Eingangsoffsetspannung
U
o
- Gleichtakteingangswiderstände
- Differenzeingangswiderstand
ra
- Ausgangswiderstand
Ua = F ( U' - U' )
o s+ s -
Ersatzschaltung und Kennwerte für OPV
A2.6 Zeichnen Sie den Zeitverlauf der Spannung Uo (t) der Schaltung nach Bild A2.6, wenn die
Eingangsspannungen U1 (t) und U2 (t) die im Bild skizzierten Verläufe aufweisen. Der OPV habe
eine Leelaufverstärkung Vo = 20 000 und eine Ausgangssättigungsspannung |Uo max | [ 10 V. Dabei
wird angenommen, daß der OPV beliebig schnelle Spannungsänderungen verarbeitet.
U2
+
U1
UI
0,5
Vo
Uo
mV
0,3
U1
0,1
t3
t1
U2
- 0,1
- 0,3
Bild A2.6
t4
t2
t6
t5
t7
t
- 0,5
A2.7 Bestimmen Sie für die Verstärker-Grundschaltungen mit idealem OPV in Bild A2.7 die
Ausgangsspannungen Uo und die Eingangswiderstände der Schaltungen bzgl. der Signalquellen Ue .
R1
R2
-
Ue
+
R1
R2
-
Uo
+
Uo
Ue
invertierender Verstärker
nichtinvertierender Verstärker
Bild A2.7
A2.8 Bestimmmen Sie mit Hilfe der Netzwerkanalyse den Eingangswiderstand der invertierenden
und nichtinvertierenden Schaltung in Bild A2.5 und vergleichen Sie mit den Ergebnissen aus
Aufgabe A2.7.
ü4
A2.9 Bestimmen Sie die Ausgangsoffsetspannung der invertierenden bzw. der nichtinvertierenden
Verstärkerschaltung (Bild A.2.7), wenn bei kurzgeschlossenen Signaleingängen der OPV folgende
Eingangsfehlergrößen besitzt: Ie = 100 nA, Ie off = 10 nA, Uoff = 5 mV.
Die Widerstände des Gegenkopplungsnetzwerkes sind für eine Betriebsverstärkung V = 100 und
einen Eingangswiderstand von Rein = 10 kΩ der invertierenden Schaltung zu bemessen.
A2.10 Bestimmen Sie die Ausgangsspannung Uo der Schaltung in Bild A2.10 a) für endliche und
unendliche Leerlaufverstärkung Fo des OPV (sonst ideal) und diskutieren Sie den Einfluß von R3
auf das Ergebnis (siehe auch Bild A2.10 b).
R2
R1
R3
Ue
R2
R1
R3
-
+
a) invertierender Verstärker
+
Ue
Uo
Uo
b) Verstärker mit Begrenzung
Bild A2.10
A2.11 Eine invertierende Strom-Spannungswandlerschaltung zeigt Bild A2.11. Bestimmen Sie die
Ausgangsspannung Uo in Abhängigkeit des Eingangssignalstromes Ie in allgemeiner Form für
idealen OPV. Ermitteln Sie den Wert des Rückkopplungswiderstandes R1 für den Fall, daß ein
Stromsignal Ie = 0 ... 20 mA (z. B. Einheitsstrom in msr-Anlagen, 20 mA - Stromschleife) in eine
Ausgangsspannung Uo = (0 ... - 5) V umgesetzt werden soll.
R1
Ie
+
I
U1
invertierender I/U-Wandler
Bild A2.11
ra
Ri
Uo
R1
x1
Ue
R1 U2
Ua
Uo
Rf
Ua = V (U1- U2) = V R i I
Bild A2.12
A2.12 Für die Verstärkerschaltung mit einem Transimpedanz-OPV (Bild A2.12) ist die allgemeine
Abhängigkeit der Ausgangsspannung Uo von den Eingangsspannungen Ue und U1 für ya d ∞ zu
bestimmen. Der Widerstand Rf ist so zu bemessen, daß bei R1 = 50 Ω, V d ∞ und Ue = 0 für die
Ausgangsspannung Uo = 32 U1 gilt. Mit welcher Verstärkung wird dann Ue übertragen?
ü5
Operationsverstärker
A3.1 Bestimmen Sie die Ausgangsoffsetspannung der Schaltung in Bild A3.1, wenn die gleichen
OPV-Kennwerte und Widerstände wie in Aufgabe A2.9 angenommen werden. Begründen Sie die
Funktion und Bemessung von Widerstand R3 .
A3.2 Welche Kompensations-Eingangsspannung UK muß in der OPV-Schaltung nach Bild A3.1
angeschlossen werden, damit die Ausgangsoffsetspannung verschwindet ?
R2
R5 U
e
R1
-
Ue
R2
+U
CC
-
R4
Uo
+
R1
Uo
+
R3
R3 = R1|| R2
-U
Bild A3.1
CC
Bild A3.3
A3.3 Für einen invertierenden Verstärker soll das Ausgangs-Ruhepotential für Ue = 0 mit einer
Schaltung nach Bild A3.3 auf UoAP = +6 V ! 20% angehoben werden. Die Signalspannung Ue soll
mit einer Verstärkung V = -3 übertragen werden, der Eingangswiderstand der Schaltung für diese
Signalquelle soll mindestens 5 kΩ betragen. Bemessen Sie die Widerstände für diese Forderungen.
A3.4 Ein Differenzverstärker (Bild A3.4) soll die Differenz der Eingangsspannungen bei möglichst
hoher Gleichtaktunterdrückung übertragen. Bestimmen Sie die Widerstände und die damit folgende
Differenzverstärkung der Schaltung, wenn die Eingangsspannungen U1 = 400 V, U2 = U1 - U und
der zulässige Gleichtaktbereich des OPV bei UCC = 15 V mit - 15 V < UG < + 13 V gegeben sind.
A3.5 Mit welchem (Gleichtakt-)Strom wird die Signalquelle U2 in der Schaltung nach Bild A3.4
belastet und welchen Widerstand sieht eine am Eingang angeschlossene Differenzspannungsquelle,
wenn die zulässige Verlustleistung der Widerstände mit 0,33 W gegeben ist ?
R1
R2
U1
U2
R3
+
R4
Bild A3.4
C
R1
Ucc
R
Uo
- Ucc
R2
-
Ucc
+
Ue
Uv
R
Uo
Bild A3.6
A3.6 Für die Schaltung in Bild A3.6 gelte R1 = R = 1 kΩ, UCC = UV = 5 V, U e = Û e cos *t; der OPV
werde als ideal angenommen.
a) Bestimmen Sie die Ausgangsspannung UoA im Arbeitspunkt (Ue = 0),
b) Ermitteln Sie die Wechselspannungsverstärkung VU und skizzieren Sie ihren Frequenzverlauf.
c) Bemessen Sie R2 und C, wenn für hohe Frequenzen |VU | = 40 dB und * g = 15 . 110 −3 s −1 gilt.
d) Wie groß darf Ûe bei verzerrungsfreier Übertragung maximal werden?
ü6
A3.7 Die in Bild A3.7 gezeigte Schaltung kann als Instrumentationsverstärker eingesetzt werden.
a) Bestimmen Sie die Spannungen UA1 , UA2 und UA in allgemeiner Form unter Annahme idealer
OPV in Abhängigkeit der Eingangsspannungen U1 und U2 .
b) Ermitteln Sie bei UA1 = UA2 = 0 die Ausgangsspannung UA in allgemeiner Form in Abhängigkeit
der Eingangsruheströme Ie+ und Ie- .
c) Bemessen Sie die Widerstände R3 ... R6 der Schaltung so, daß für die Ausgangsspannung UA gilt:
UA = UA2 - UA1 für Ie+ = Ie- = 0 und UA = R* (Ie+ - Ie- ) [ 1 mV für UA1 = UA2 = 0.
Für den Offsetstrom des OPV gilt IOff = (Ie+ - Ie- ) = 100 nA.
d) Welche Gesamtverstärkung der Schaltung ergibt sich für Ihre Bemessung, wenn R2 = 5 R1 gilt?
R1
U1
UA1 R3
+
-
R1
R2
I e-
+
Ue1
UA
+
R5
UG
UA1
GND
a) invertierender Verstärker
Ie+
UA2
Vo
+
0
-
R2
-
U2
R4
R2
R1 I = 0
Ue2
R6
R2 I = 0
+
V
-
UA2
UG
0
GND
b) Instrumentationsverstärker
Bild A3.7
Bild A3.8
A3.8 Ermitteln Sie die Wertebereiche der Ausgangsspannungen UA1 und UA2 der in Bild A3.8
gezeigten Schaltungen unter Annahme idealer OPV. Für die Signalquellen beider Schaltungen gelte
UG = 1 V, Ue1 = Ue2 = 1 V sin *t .
a) invertierende OPV-Schaltung mit V o d ∞, R2 = 10 kΩ , R1 = 2 kΩ ;
b) Instrumentationsverstärker mit äußerer Verstärkung V = 8.
A3.9 Mit der in Bild A3.9 gezeigten OPV-Schaltung soll eine stabilisierte Ausgangsspannung UA
realisiert werden. Wie ist Widerstand R1 zu bemessen, damit UA = 10 V gilt? Für die verwendeten
Schaltungselemente sind folgende Angaben bekannt:
UZ = URef = 1,2 V, UBEF = 0,6 V, R2 = 12 kΩ, Rv = 4,7 kΩ, UE m 15 V, Uomax = ± 14 V.
UBEF
∝
UE
Uo
S2
Rv
R2
-
+
UZ
R
R1
Bild A3.9: Spannungsstabilisierung
UA
L
Ue
S1
R2
∝
+
Ua
R1
Bild A3.10: Programmierbarer Verstärker
ü7
A3.10 Gegeben ist die Schaltung eines digital programmierbaren Verstärkers nach Bild A3.10.
Bestimmen Sie die Ausgangsspannung Ua in allgemeiner Form für die beiden Schalterstellungen
a) Schalter S1 - geschlossen, S2 - offen,
b) Schalter S1 - offen, S2 - geschlossen,
wenn für die Widerstände der Analogschalter RON = RS bzw. ROFF _> ∝ gesetzt wird und der OPV
als ideal angesehen werden kann.
A3.11 Bestimmen Sie für die Stromquellenschaltungen in Bild A3.11 allgemeine Ausdrücke für
die Ströme I1 und IL bei endlicher und unendlicher Leerlaufverstärkung F0 des OPV.
Welche Polarität muß die Spannung Ue für eine ordnungsgemäße Funktion der Schaltungen haben?
+U
+UCC
Ue
RL
I
+
-
I
IL
+UCC
Ue
L
+
-
B
I1
-UCC
R1
a)
I1
-UCC
R1
b)
Bild A3.11: Stromquellenschaltungen mit OPV
A3.12 Bestimmen Sie den Strom I1 der Stromquellenschaltung in Bild A3.12 unter Annahme eines
idealisierten OPV mit V d ∞ und Uoutmax = 10 V bei UCC = 12 V. Bekannt sind weiter: Ue = 5 V,
R1 = 1 kΩ, RL = 0,5 kΩ sowie für den Transistor UBEF = 0,6 V, IB m 0,1 mA, B > 100.
UCC
U CC
R2
RL
+
∝
-
Ue
U
BE
R
URef
I1
+
∝
-
I1
-
U
IB 1
+
∝
IB
R3
U2
T2
T
1
IL
R1
R
1
Bild A3.12: Stromquelle für schwimmende Last
L
Bild A3.13: Stromquelle für massebezogene Last
A3.13 Bild A3.13 zeigt eine Stromspiegelschaltung als Konstantstromquelle für geerdete Lasten.
Bestimmen Sie eine allgemeine Bestimmungsgleichung für den Laststrom IL in Abhängigkeit der
Kennwerte URef , Ri , IB , UCC der Schaltung. Welchen Einfluß hat die Versorgungsspannung UCC ?
ü8
A3.14 Bild A3.14 zeigt zwei Schaltungen programmierbarer Mehrfachstromquellen, sogenannte
Strombänke, wie sie z. B. in Digital-Analog-Umsetzern eingesetzt werden.
Bestimmen Sie durch Analyse der gegebenen Schaltungen allgemeine Bestimmungsgleichungen für
die Ströme I0 , I1 und I2 unter Annahme gleicher Kennwerte der Transistoren.
I1
U1
I2
+
UO
-
R0
a)
R
U1
+
I0
I1
I2
-
I0
R
UO
R2
1
R0
b)
R
R2
1
Bild A3.14: Programmierbare Mehrfachstromquellen
A3.15 Bestimmen Sie die Ströme IA und IB im R-2R-Widerstandsnetzwerk nach Bild A3.15 für
die angegebene Schalterstellung bei Stromeinspeisung IRef bzw. bei Spannungseinspeisung URef .
Welche maximale Spannung UAmax ergibt sich am Ausgang des Strom-Spannungswandlers, wenn
ein Referenzstrom IRef = 1 mA in das Widerstands-Netzwerk mit R = 10 kΩ eingespeist wird ?
Welche Last sieht eine angeschlossene Referenzspannungsquelle URef, wenn ideale Analogschalter
mit RON = 0 angenommen werden ? Welchen Einfluß haben parasitäre Kapazitäten CS der
Analogschalter auf das zeitliche Verhalten der Schaltung?
U Ref
2R
R
R
R
I Ref
2R
LSB
C
2R
2R
R
2R
I
MSB
IB
S
invertiertes R-2R-Netzwerk
A
+
IA
Bild A3.15: Programmierbarer Stromschalter
I/U-Wandler
UA
ü9
Analoge Komparatoren
A6.1 Geben Sie die Übertragungsfunktion und Übertragungskennlinie eines Analogkomparators
nach Bild A6.1 an.
A6.2 Ermitteln Sie den Einfluß der eingangsseitigen Kennwerte des OPV (Ie+, Ie-, Uoff, Ugl ) auf die
Umschaltschwellen des Komparators gemäß Ersatzschaltung in Bild A6.2.
A6.3 Begründen Sie die Schutzschaltungen (Dioden, Widerstände) der beiden Grundschaltungen
analoger Komparatoren in Bild A6.3 und ihren Einfluß auf das Schaltungsverhalten.
Ri
I eU1
U
2
-
Fo
+
Rn
Uo
I e+
Fo
+
Uo
Ugl
G
Bild A6.2
Bild A6.1
R
U1
U
2
-
Uoff
Fo
+
R
Uo
U1
U2
R1
-
Fo
+
R2
Uo
R1 || R 2
b) ohne Gleichtaktaussteuerung
a) mit Gleichtaktaussteuerung
Bild A6.3
A6.4 Bestimmen Sie die Übertragungskennlinien und Übertragungfunktionen für die in Bild A6.4
gezeigten Komparatorschaltungen mit stabilisierter Ausgangsspannung.
+U
Rv
UZ + UF
U1
U2
R
U1
R
a)
Bild A6.4
-
Fo
+
1R
2
Uo
U2
b)
R
2 UF
R
-
Fo
+
1 R
2
Uo
Rv
-U
ü 10
A6.5 Geben Sie qualitativ die Übertragungskennlinie der in Bild A6.5 gezeigten Schaltung eines
Fensterkomparators an.
U2
U
CC
R
Uo
+
Fo
-
Ue
U1
+
Fo
-
U2 > U1
X2
&
Ue
+
Fo
-
+
Fo
-
U1 > 0
Y
X1
Bild A6.5: Fensterkomparator
A6.6 Geben Sie die Signalverläufe Uo(t) und Ua(t) der in Bild A6.6 gezeigten Schaltungen von
Pegeldetektoren qualitativ an, wenn z. B. ein sinusförmiges Eingangssignal Ue(t) anliegt.
C
Ue
+
Uo
-
C
D
Ua
R
R
1
a) Nullpegeldetektor
Ue
Uo
+
2
b) Spitzenwertdetektor
Bild A.6.6: Pegeldetektoren
A6.7 Bestimmen Sie für die Hysterese-Komparatoren nach Bild A.6.7 die Übertragungsfunktionen
und geben Sie die zugehörigen Übertragungskennlinien qualitativ an.
Ermitteln Sie allgemeine Bestimmungsgleichungen für die Umschaltschwellen UeH und UeL sowie
die Hysteresespannung UH und vergleichen Sie die Ergebnisse.
Bestimmen Sie für beide Betriebsarten das Widerstandsverhältnis R1 : R2 zahlenmäßig, wenn für
die Umschaltschwellen UeH = - UeL = 3,5 V gefordert wird. Für die maximalen Ausgangspegel am
OPV sei gegeben U +o max = − U −o max = 14 V.
R1|| R2
U1
U2
R 1|| R2
-
R1
+
Uo
R2
U2 = konst. (invertierender Betrieb)
U1
U2
R1
+
Uo
R2
U1= konst. (nichtinvertierender Betrieb)
Bild A6.7: Grundschaltung von Hysteresekomparatoren
ü 11
Die Schaltschwellen von Hysterese-Komparatoren lassen sich unabhängig voneinander einstellen,
wenn mit Hilfe von Dioden die Rückkopplung nichtlinear ausgeführt wird (Bilder A6.8, A6.9).
A6.8 Geben Sie allgemeine Bestimmungsgleichungen für die Umschaltschwellen UeH und UeL der
in Bild A6.8 gezeigten Schaltungen an und zeichnen Sie die Übertragungskennlinien Uo = f (Ue ).
Wie ändern sich mit den in Aufgabe A6.7 (invertierender Betrieb) ermittelten Widerständen die
Schaltschwellen unter Berücksichtigung der Diode D in den beiden Schaltungsvarianten, wenn für
die Flußspannung der Diode UF = 0,6 V angenommen wird ?
U1
R
R
+
Us+
U1
Uo
Vo
D
R
2
+
UF
Us+
R1
a)
-
Uo
Vo
D
R2
UF
R1
b)
R = R1 || R2
R = R1 || R2
Bild A6.8: Hysterese-Komparatoren mit getrennter Einstellung der Schwellwerte
A6.9 Geben Sie allgemeine Bestimmungsgleichungen für die Umschaltschwellen UeH und UeL der
in Bild A6.9 gezeigten Schaltungen an.
R
U1
+
Vo
Uo
-
Vo
Uo
Us+
R
R12
b)
R1
a)
R
+
R22
R21
Us+
U1
2
R11
Bild A6.9: Getrennte Einstellung der Schwellwerte bei Hysterese-Komparatoren
A6.10 Bild A6.10 zeigt einen Hysteresekomparator mit Begrenzung der Ausgangsspannung, der
sich u.a. als Interfaceschaltung für TTL-Einheiten eignet. Geben Sie qualitativ den Zeitverlauf Uo (t)
an, wenn z. B. ein sinusförmiges Eingangssignal U1 (t) anliegt und U2 = konstant gilt.
U1
U2
R1|| R2
R1
Vo
+
R2
U*
o Rv
Uo
ZD
Bild A6.10: Hysteresekomparator als TTL-Interface
ü 12
Hysterese-Komparatoren mit Timer-Schaltkreisen
Komparatoren mit einstellbarer Hysterese lassen sich auch mit Doppel-OPV und RS-Flipflop
realisieren. In speziellen Timer-Schaltkreisen ist das Flipflop mitintegriert (Bilder A611, A6.12).
A6.11 Erklären Sie die Wirkungsweise der Komparator-Schaltung in Bild A6.11 und bestimmen
Sie ihre Hysteresespannung. Geben Sie die Übertragungskennlinie an.
U2
+
X2
&
-
Y
Ue
+
&
X1
Y
-
U1
Bild A6.11: Hysteresekomparator mit RS-Flipflop
A6.12 Geben Sie die Beschaltung des Timer-Schaltkreis 555 (Bild 6.12) als Hysteresekomparator
an. Welche Schaltschwellen hat diese Schaltung?
V+
8
THRESHOLD
CONTROL
VOLTAGE
6
4
R
≥1
R
5
3
7
R
TRIGGER
≥1
S
2
R
Q
1
GND
Bild A6.12: Timer-Schaltkreis 555
555
RESET
OUTPUT
DISCHARGE
ü 13
Signal- und Funktionsgeneratoren
A7.1 Geben Sie für die Grundschaltung eines Dreieck-Rechteck-Generators mit OPV (Bild A7.1)
qualitativ die Zeitverläufe U1 (t) und U2 (t) an und ermitteln Sie allgemeine Ausdrücke für die
−
Spannungen U +1K und U 1K
, bei denen der Komparator umschaltet (ideale OPV angenommen).
Bestimmen Sie die Periodendauer T der Dreieck- bzw. Rechteckschwingung bei symmetrischen
Sättigungsspannungen der OPV-Ausgänge.
A7.2 Einen einfachen monostabilen Multivibrator mit OPV zeigt die Schaltung in Bild A7.2.
Bestimmen Sie die Zeitverläufe Uo (t) und Us+ (t), wenn ein kurzer positiver Eingangsimpuls mit der
Amplitude Ui > |UR | auf den invertierenden Eingang des OPV geschaltet wird. Ermitteln Sie die
Dauer des quasistabilen Zustandes der Schaltung (Haltezeit TH). Welche Wirkung hat die gezeigte
Hilfsschaltung auf das Zeitverhalten der Schaltung ?
C
R1
C
R4
R3
+
+
+
-
U1
R2 = R1
R
U2
R2
R1
UF
R
R3||R4
U <0
R
Bild A7.1: Dreieck-Rechteck-Generator mit OPV
Uo
-
Ui
C
D
R
Hilfsschaltung
Bild A7.2: Monoflop mit OPV
A7.3 Bild A7.3 zeigt einen einfachen Rechteckgenerator mit einem OPV. Zeichnen Sie qualitativ
die Zeitverläufe Uo (t), Us- (t) und Us+ (t) dieser Schaltung. Ermitteln Sie die Teilzeiten T1 und T2
sowie die Periodendauer T = T1 + T2 des Rechtecksignales Uo (t) bei Annahme symmetrischer
Sättigungsspannungen des OPV-Ausganges. Wie groß sind Gleichtakt-Eingangsspannung UGl und
maximale Differenz-Eingangsspannung UDmax in der angegebenen Schaltung?
A7.4 Erklären Sie die Wirkungsweise des in Bild A7.4 gezeigten Fotostrom-Frequenzwandlers.
Bestimmen Sie unter Annahme eines idealen OPVs mit U +o max = − U o−max = U o max die Frequenz f
der Schaltung als allgemeine Funktion der Kennwerte IF , R1 , R2 , C und Uo max .
IF
R
∝
C
UC
R3
-
+
R2
R1
Bild A7.3: Rechteckgenerator
Uo
∝
C
+
Uo
R2
R1
Bild A7.4: Fotostrom--Frequenzwandler