Die irreduziblen Darstellungen der SU(2)
Werbung
")
Die irreduziblen Darstellungen der SU(2)
Carolin Kurig und Daniel Reitz
3. Januar 2005
1
Inhaltsverzeichnis
1 Motivation
3
2 Wiederholung
2.1 unitäre Matrizen und die Menge SU(n)
2.2 Darstellung einer Gruppe . . . . . . .
2.3 irreduzibel . . . . . . . . . . . . . . . .
2.4 Schursche Lemmata . . . . . . . . . .
.
.
.
.
3
3
3
4
4
3 SO(3) und SU(2)
3.1 Parametrisierungen der SU(2) . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Cayley-Klein-Darstellung . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Paulimatrizen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
4
5
6
.
.
.
.
.
.
.
.
4 Zusammenhang zwischen SO(3) und SU(2)
4.1 Vorbetrachtungen . . . . . . . . . . . . . .
4.1.1 Gruppentheoretische Bemerkung .
4.2 Einfach- und zweifach-zusammenhängend
4.2.1 Klassische Beispiele . . . . . . . .
4.2.2 SU(2) . . . . . . . . . . . . . . . .
4.2.3 SO(3) . . . . . . . . . . . . . . . .
4.3 Vergleich der Lie-Algebren . . . . . . . . .
5 Die
5.1
5.2
5.3
5.4
5.5
irreduziblen Darstellungen der SU(2)
Homogene Polynome . . . . . . . . . .
Polynome transformieren . . . . . . .
D-Matrizen sind irreduzibel . . . . . .
Einbeziehen der Eulerschen Winkel . .
Beispiele für D-Matrizen . . . . . . . .
5.5.1 Allgemeine Form . . . . . . . .
5.5.2 Kugelflächenfunktionen . . . .
5.5.3 Spinoperator . . . . . . . . . .
5.5.4 Drehimpulsoperator . . . . . .
6 Haarsches Maß
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
8
9
9
10
10
10
11
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12
12
13
15
16
17
17
17
17
17
18
2
1 Motivation
Im ersten Seminarvortrag von Andreas Müller Die Drehgruppe in der Quantenmecha”
nik - Erzeugende und Darstellungen“ haben wir uns fast ausschließlich mit der aus der
klassischen Mechanik wohlbekannten Drehgruppe SO(3) beschäftigt. Dabei wurde jedoch deutlich, dass sich diese Gruppe nur mit Einschränkungen in der QM nutzen lässt,
da Forderungen, welche beispielsweise aus der Stetigkeit der Kugelflächenfunktionen unter Drehungen des Bezugssystems um 2π stammten, für halbzahligen Drehimpuls nicht
mehr erfüllt sind.
Als Ausweg wurde schon dort die Gruppe der eigentlichen unitären 2x2-Matrizen (SU (2))
genannt, um die es nun in diesem Vortrag gehen soll.
2 Wiederholung
Zuerst möchten wir einige Begriffe wiederholen, die schon in den vorherigen Vorträgen
genauer definiert und diskutiert wurden. Sie werden im Verlauf des Vortrags immer
wieder auftauchen und sind daher für das Verständnis wichtig.
2.1 unitäre Matrizen und die Menge SU(n)
Eine Matrix U ∈ Mn×n (C) heißt unitär, wenn ihr hermitesch Konjugiertes (U † ) mit der
Inversen U −1 zusammenfällt: U † = (U ∗ )T = U −1 .
Die Menge
n
o
SU (n) = U ∈ Mn×n (C) |U † = U −1 , det(U ) = +1
(1)
ist die Menge der sogenannten eigentlichen, unitären n×n-Matrizen. Sie bildet bezüglich
der Matrixmultiplikation eine Gruppe.
In diesem Vortrag behandeln wir ausschließlich den Fall n = 2, die Menge der 2dimensionalen eigentlichen unitären Matrizen über C. Im Vortrag Kompakte Lie-Gruppen
”
als innere Symmetrien“ von Michael Semmel und Sebastian Becker wird auch auf die
anderen Fälle (n 6= 2) näher eingegangen.
2.2 Darstellung einer Gruppe
Sei G eine Gruppe, X ein Vektorraum.
Eine Abbildung A : G → L(X) heißt Darstellung einer Gruppe, wenn sie folgende zwei
Eigenschaften erfüllt:
• A(idG ) = idL(X)
• ∀ a, b ∈ G : A(a ◦ b) = A(a) ◦ A(b)
3
2.3 irreduzibel
Eine Menge von Matrizen heißt irreduzbel, wenn es außer den trivialen Unterräumen {0}
und CN keine Unterräume gibt, die unter allen Matrizen invariant sind.
∀ x ∈ U ⊆ CN , A ∈ M : Ax ∈ U
(2)
Um eine genauere Vorstellung davon zu erhalten, wie solche irreduziblen Matrizen aussehen, verweisen wir an dieser Stelle schon einmal auf die Beispiele weiter unten.
2.4 Schursche Lemmata
Auch hier möchten wir die Schurschen Lemmata nur zitieren. Die Beweise sind bereits im Vortrag von Andreas Müller behandelt worden und können im Paper unter
http://www.uni-mainz.de/˜andrmuel/Seminar/ nachgelesen werden.
Erstes Schursches Lemma
Genau dann, wenn eine Matrix A mit einer Menge irreduzibler Matrizen, die von R ∈
SO(3) abhängen, kommutiert, dann ist
A = λ , wobei λ ∈ C
(3)
Anmerkung: Wichtig hierbei ist, dass auch die Rückrichtung gilt, also aus der Vielfachheit der Einheitsmatrix auf die Irreuzibilität der Matrizen geschlossen werden kann.
Genau diese Richtung werden wir später für den Beweis der Irreduzibilität der konstruierten Darstellungen der SU(2) benutzen.
Zweites Schursches Lemma
Es seien D(R) und D 0 (R) quadratische Matrizen der Dimension n bzw. n0 , die unitär
und irreduzibel sind, und die von R ∈ SO(3) abhängen.
Sei weiterhin M eine Matrix mit n Spalten und n0 Zeilen, die die Relation
M D(R) = D 0 (R)M
für alle
R ∈ SO(3)
(4)
erfüllt.
Dann gilt: Entweder ist M ≡ 0 oder aber n = n0 und det(M ) 6= 0. Im zweiten Fall
sind D(R) und D 0 (R) äquivalent, d.h. D 0 (R) = M D(R)M −1 , was bedeutet, dass sich
D 0 (R) durch Basistransformation in D(R) umformen lässt.
3 SO(3) und SU(2)
3.1 Parametrisierungen der SU(2)
Da an die hier betrachteten komplexen 2×2-Matrizen weitere Zusatzbedingungen (unitär
und det = 1) gemacht werden, ist es verständlich, dass zur Parametrisierung einer solchen Matrix nicht notwendigerweise alle vier Einträge explizit bekannt sein müssen.
4
Vielmehr ergeben sich aus einer geringeren Anzahl mit Hilfe der Zusatzbedingungen die
restlichen Einträge. Wie viele dies sind und welche Eigenschaften an sie gestellt werden
muss, wollen wir nun kurz erarbeiten.
Aus der Vielzahl der Parametrisierungsmöglichkeiten der SU (2) greifen wir nun die zwei
in unserem Vortrag verwendeten heraus und stellen sie kurz vor:
3.1.1 Cayley-Klein-Darstellung
Jedes Element U der SU (2) lässt sich eindeutig durch die komplexen Parameter
u = ξ0 + iξ1 , v = ξ2 + iξ3 ∈ C
(5)
in der Form:
U=
u11 ≡ u
u12 ≡ v
∗
u21 ≡ −v u22 ≡ u∗
mit |u|2 + |v|2 = 1
(6)
darstellen. Man bezeichnet, je nach Literatur, entweder die komplexen Parameter u, v
oder aber die vier reellen Werte {ξi }3i=0 als Cayley-Klein-Parameter.
Aus der Zusatzbedingung an die Determinante der Matrix folgt sofort, dass nur drei der
vier Parameter wirklich frei gewählt werden können, der vierte ist dann automatisch
über die Gleichung (6) festgelegt.
Gleichung (6) lässt auch erste topologische Aussagen über die Gruppe SU (2) zu:
2
2
|u| + |v| =
3
X
ξi2 = 1
(7)
i=0
Dies erinnert nicht ohne Grund an die bekannte Kugelgleichung im R3 , sondern sagt
aus, dass die SU(2) als S 3 im R4 aufgefasst werden kann, worauf wir jedoch später noch
zurückkommen werden.
Beweis der Darstellbarkeit der SU(2)-Matrizen über die CK-Parameter:
Sei U eine beliebige 2 × 2-Matrix mit komplexen Einträgen und Determinante 1:
a b
U=
wobei a, b, c, d ∈ C
c d
Dann ist:
†
U =
a∗ c∗
b∗ d∗
U
−1
=
d −b
−c a
Aus der Forderung U † = U −1 folgt somit a = d∗ und b = −c∗ .
5
(8)
(9)
3.1.2 Paulimatrizen
Eine andere Möglichkeit der Darstellung bedient sich der drei Paulimatrizen.
Man kann zeigen, dass sich jedes Element der SU (2) als Exponentialreihe einer hermiteschen, spurlosen (2 × 2)-Matrix h darstellen lässt (ohne Beweis):
U = exp (ih)
mit h† = h und Sp (h) = 0
(10)
Außerdem zeigt man leicht (vgl. Übungsaufgabe XX - Theoretische Physik III (Scheck)),
dass der Raum der hermiteschen, spurlosen 2 × 2-Matrizen isomorph zum R3 ist, so dass
gilt:
σ1
x
z
x + iy
=
σ2
·
(11)
h=
y
x − iy
−z
σ3
z
Die drei Paulimatrizen {σi}3i=1 sind hermitesch, spurlos und linear unabhängig und bilden somit auch eine Basis für den Raum der hermiteschen, spurlosen Matrizen (??)über
C
Somit gilt:
!
3
σ
X
σi
U = exp (ih) = exp i
αi
= exp iα
, wobei σ = (σ1 , σ2 , σ3 ) (12)
2
2
i=1
Es fällt auf, dass ein Faktor 1/2 künstlich aus dem Koeffizientenvektor α herausgezogen
wurde. Dass dieser Schritt jedoch durchaus sinnvoll ist, wird sich weiter unten zeigen,
wenn es um den physikalischen Zusammenhang dieser Darstellung einer SU (2)-Matrix
geht.
Beweis der eindeutigen Darstellbarkeit mittels Paulimatrizen
Es wird nur bewiesen, dass die Abbildung
α 7−→ h = ασ mit h† = h, Sp(h) = 0
(13)
bijektiv ist. Die Eindeutigkeit der Darstellung ergibt sich dann aus der Tatsache, dass
sich jede SU (2)-Matrix über die Matrixexponentialfunktion in einer solchen hermiteschen, spurlosen Matrix h, darstellen lässt.
Beweis:
⇒:
Sei α = (x, y, z)T ∈ R3 . Dann ist
z
x + iy
⇒ Sp(h) = z + (−z) = 0
h = ασ =
x − iy
−z
6
(14)
Außerdem gilt
†
h =
z
x − iy
x + iy
−z
T
=
z
x + iy
x − iy
−z
=h
⇐:
Sei h eine komplexe, hermitesche und spurlose 2 × 2-Matrix.
a b
mit a, b, c, d ∈ C
h=
c d
(15)
(16)
Dann folgt aus den geforderten Eigenschaften, dass
d = −a
(17)
∗
(18)
∗
(19)
a = a ⇒ a, d ∈ R
c = b
(20)
h nimmt somit die geforderte Form an:
h=
a
<(b) + i=(b)
<(b) − i=(b)
−a
<(b)
σ1
= =(b) σ2
a
σ3
(21)
Ein anderer Weg bei gegebener Matrix h die zugehörigen Einträge des Koeffizientenvektors α bestimmen zu können, bedient sich dem sogenannten Antikommutator
{a, b} = ab + ba
(22)
Mit ihm lassen sich die Einträge über
αi
=
1
{h, σi }
2
(23)
bestimmen.
Beweis:
Zunächst rechnet man die Antikommutatorrelation der Paulimartizen nach:
{σi , σj } = σi σj + σj σi = 2δij
7
(24)
Sei nun h eine hermitesche, spurlose 2 × 2-Matrix. Wie gezeigt, kann sie als Linearkombination der Paulimatrizen dargestellt werden:
h = ασ = α1 σ1 + α2 σ2 + α3 σ3
(25)
Dann ist
{h, σi } =
( 3
X
αk σk , σi
k=1
)
=
3
X
k=1
=
3
X
αk {σk , σi }
αk 2δik
k=1
= 2αi
(26)
4 Zusammenhang zwischen SO(3) und SU(2)
4.1 Vorbetrachtungen
Ausgehend von den vorherigen Überlegungen zur Darstellung der Elemente der SU (2)
können wir die folgenden Rückschlüsse ziehen:
1. Jedem V ∈ SU (2) lässt sich in eindeutiger Weise eine spurlose hermitesche Matrix
h ∈ M2×2 (C) zuordnen.
2. Da die Paulimatrizen eine Basis für alle spurlosen hermiteschen 2 × 2-Matirzen
sind, kann dieses h eindeutig zerlegt werden:
z
x − iy
h = x σ1 + y σ 2 + z σ 3 =
, wobei x, y, z ∈ R
(27)
x + iy
−z
Insbesondere haben wir somit h (und damit auch V ∈ SU (2)) in eindeutiger Weise
ein x ∈ R3 zugeordnet.
Die Determinante von h ist:
det(h) = z(−z) − ((x + iy)(x − iy)) = −kxk2
(28)
3. Als nächstes untersuchen wir die Wirkung einer unitären Transformation U ∈
SU (2) auf h.
Sei also
h0 = U hU †
(29)
Diesem h0 können wir (genauso wie in 2.) ein x0 ∈ R3 zuordnen. Die Determinante
von h0 ist dann:
det(h0 ) = −kx0 k2
(30)
8
4. Bekanntermaßen ändert sich die Determinante unter unitären Transformationen
nicht:
det(h0 ) = det(U hU † ) = det(hU † U ) = det(h)
(31)
Dann ist aber
kxk2 = kx0 k2
x0
(32)
R3
Daraus folgt sofort, dass sich x und
nur um eine Drehung im
unterscheiden
0
können, also: x = Rx
Auf diese Art und Weise lässt sich jedem U ∈ SU (2) ein R ∈ SO(3) zuordnen.
5. Diese Abbildung von SU (2) → SO(3) ist nicht injektiv.
Wenn wir in (29) U durch −U ∈ SU (2) ersetzen, folgt:
h00 = (−U )h(−U )† = U hU † = h0
(33)
Somit wird −U ∈ SU (2) genau das gleiche R ∈ SO(3) wie auch U ∈ SU (2)
zugeordnet.
4.1.1 Gruppentheoretische Bemerkung
Der in (5.) hergestellte Zusammenhang lässt sich auch wie folgt beschreiben:
H = {+ , − } ist eine invariante Untergruppe der SU (2), d.h.
U (± )U 0 = ±
∀U ∈ SU (2)
(34)
Wie die Gruppentheorie lehrt, bilden die Nebenklassen {U H} wieder eine Gruppe.
In einer Nebenklasse sind alle U ∈ SU (2) zusammengefasst, die sich nur um Multiplikation mit H unterscheiden. (Konkret umfasst hier also jede Nebenklasse genau zwei
Elemente U und −U ∈ SU (2).)
Dass die Nebenklassen {U H} eine Gruppe bilden, prüft man durch die Gruppenaxiome
nach (s. [4] Seite 12)
Diese Gruppe der Nebenklassen heißt auch Faktorgruppe, man schreibt dafür SU (2) { , − }.
Gruppentheoretisch bedeutet also (5.):
Die SO(3) ist isomorph zur Faktorgruppe aus den Nebenklassen der invarianten Untergruppe { , − } der SU (2), kurz
SO(3) ∼
= SU (2) { , − }
(35)
4.2 Einfach- und zweifach-zusammenhängend
Definition:
Eine Mannigfaltigkeit heißt n-fach zusammenhängend, wenn das Zusammenziehen aller
möglichen geschlossenen stetigen Wege (s. dazu Vortrag 13) n Klassen von gleichartig
zusammengezogenen Wegen ergibt.
9
4.2.1 Klassische Beispiele
• auf einer Kugeloberfläche lassen sich alle stetigen geschlossenen Wege auf einen
Punkt zusammenziehen
→ 1-fach zusammenhängend.
• in einem Torus im R3 ( Autoreifen“) gibt es zwei Arten von geschlossenen Wegen.
”
Solche, die sich auf einen Punkt zusammenziehen lassen und solche, die um das
Loch“ herumgehen und sich nicht weiter zusammenziehen lassen.
”
→ 2-fach zusammenhängend.
Betrachten wir nun die SU (2) und die SO(3) als Mannigfaltigkeiten. Wie oft sind diese
wohl zusammenhängend?
4.2.2 SU(2)
Benutzen wir die Parametrisierung durch Cayley-Klein-Parameter. Dann gilt gemäß (5)
und (6)
a + ib c + id
U=
mit a2 + b2 + c2 + d2 = 1 a, b, c, d ∈ R
(36)
−c + id a − ib
Betrachten wir nun (a, b, c, d)T ∈ R4 so wird also die SU (2) gerade durch die S 3 im 4
beschrieben. Da die S 3 (wie jede endlich dimensionale Einheitssphäre) einfach zusammenhängend ist, ist auch die SU (2) einfach zusammenhängend.
(Man kann sich die S 3 auch durch eine stereographische Projektion auf den ganzen R3
projiziert denken, auf S 3 geschlossene stetige Wege sind dies auch in der Karte R3 und
dort natürlich auf einen Punkt zusammenziehbar.)
4.2.3 SO(3)
Die gängige Parametrisierung durch Eulersche Winkel ist für diese Überlegung denkbar
ungünstig: Stattdessen benutzt man folgendes: R ∈ SO(3) wird charakterisiert durch
eine Drehachse und einen Drehwinkel. Die Achse gebe die Richtung eines Vektors im
R3 und der Winkel seine Länge (zwischen 0 und π) an. Somit wird die SO(3) zu einer
Vollkugel mit Radius π im R3 .
Aber diese Kugel hat die besondere Eigenschaft, dass ihre Antipoden verklebt“ sind:
”
Wenn man eine Drehung um π um eine gewisse Drehachse ausführt, kann man genauso gut die antiparallel Drehachse benutzen. Konrekt bedeutet das für einen stetigen
geschlossenen Weg: Wenn dieser die Oberfläche der Kugel (also eine Drehung um π)
berührt, kann (!) er auf dem gegenüberliegenden Punkt auf der Oberfläche fortgesetzt
werden.
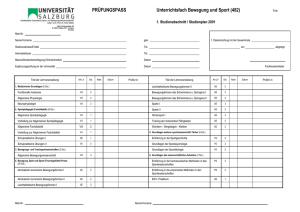
Anhand der folgenden Skizzen erkennt man dann leicht, dass die SO(3) zweifach zusammenhängend ist. Jeder Weg mit einer geraden Anzahl von Antipodensprüngen“
”
10
Abbildung 1: Einfach-zweifachzusammenhängend
lässt sich auf einen Punkt, jeder mit einer ungeraden Anzahl auf eine einzelne Achse“
”
zusammenziehen.
4.3 Vergleich der Lie-Algebren
Da sich ein späterer Vortrag (s. Vortrag 14) genauer mit dem Thema Lie-Algebra befassen
wird, führen wir hier nur kurz die Definiton ein:
Definition:
Sei V ein Vektorraum über einem Körper K.
Eine Verknüpfung [·, ·] : V × V → V heißt Lie-Algebra, wenn
• [·, ·] ist bilinear, d.h. linear in jedem Eintrag.
• Die Jacobi-Identität ist erfüllt
[a, [b, c]] + [c, [a, b]] + [b, [c, a]] = 0
∀a, b, c ∈ V
(37)
• ∀x ∈ V gilt [x, x] = 0
[·, ·] heißt Lie-Klammer.
Wir betrachten nun als Lie-Klammer den Kommutator zwischen zwei Matrizen auf den
Erzeugenden der jeweilige Gruppe:
11
σ1 σ2 σ3
2 , 2 , 2
bilden eine Lie-Algebra der SU (2)
J1 , J2 , J3
bilden eine Lie-Algebra der SO(3)
Beide erfüllen die selbe Kommutator-Relation:
σ h σ σ i
X
j
i
k
,
= i
εijk
2
2
2
k
X
[J i , J j ] = i
εijk J k
(38)
(39)
k
Da der Kommutator das Verhalten in der Nähe der
lokal isomorph.
beschreibt, sind SU (2) und SO(3)
Man benutzt hier die halben Pauli-Matrizen, damit die Kommutator-Relationen auch im
Vorfaktor übereinstimmen. Genau daher kommt der halbe Winkel in der Spin-Beschreibung.
5 Die irreduziblen Darstellungen der SU(2)
Nun geht es darum, die irreduziblen Darstellungen der SU (2) zu konstruieren. Sinn und
Zweck dieser Konstruktion ist es, dass wir mit der Kenntnis der Menge der irredziblen
Darstellungen in der Lage sind, alle SU (2)-Transformationen über diese auszudrücken.
5.1 Homogene Polynome
Zu allererst definiert man sich Polynome der folgenden Form:
(c1 )j+m (c2 )j−m
(j)
(c) := p
fm
(j + m)!(j − m)!
mit c = (c1 , c2 )T
1
3
j = 0, , 1, , 2, ...
2
2
m = −j, −j + 1, ..., 0, ..., j − 1, j
(40)
(41)
Den Ursprung dieser Polynome kann man sich anschaulich folgendermaßen überlegen:
Wir möchten letztendlich die irreduziblen Darstellungen der SU(2) gewinnen. Desweiteren wissen wir schon, dass wir mit Hilfe dieser Gruppe beispielsweise in der Lage sein
werden, den Spin eines Teilchens näher zu beschreiben. Aus dem Wissen, wie sich solche
Zustände unter Drehungen verhalten, wollen wir die Darstellungen konstruieren. Also
fordert man, dass sich diese Polynome unter Drehungen genauso verhalten sollen. Dies
bedeutet aber auch, dass sie gleiches Verhalten beim Anwenden von beispielsweise Leiteroperatoren aufweisen sollen.
Über diese Forderungen kommt man letztendlich auf die spezielle Wahl der Exponenten
und den Wurzelterm, welcher sich mitunter aus der Anwendung von J± , als Normierung
ergibt.
12
Eigenschaften der Polynome
Die Polynome sind
• homogen vom Grad 2j
(j)
fm
(λc) =
(λc )j+m (λc2 )j−m
p 1
(j + m)!(j − m)!
(c1 )j+m (c2 )j−m
= λj+m+j−m p
(j + m)!(j − m)!
(j)
= λ2j fm
(c)
(42)
• linear unabhängig
• normiert, allerdings nicht auf Eins, sondern gerade so, dass die Norm der Polynome
unter unitären Transformationen invariant ist.
5.2 Polynome transformieren
Transformieren wir nun das Argument der Polynome (40) mit einem Element U ∈ SU (2),
so erhält man
(uc1 + vc2 )j+m (−v ∗ c1 + u∗ c2 )j−m
(j)
(j)
p
(c) ≡ fm
(U c) =
fm
U
(j + m)!(j − m)!
(43)
wobei u, v ∈ C die Cayley-Klein-Parameter der Matrix U darstellen.
So erhält man nach Ersetzung der auftretenden Binome durch ihre Entwicklungen und
Umschreibung der Summationen auf m0 = j − µ − λ
p
X
(j + m)!(j − m)!
(j)
(c) =
fm
×
(j + m − µ)!µ!(m0 − m + µ)!(j − µ − m0 )!
U
0
µ,m
0
0
0
0
uj+m−µ (u∗ )j−µ−m v µ (−v ∗ )m −m+µ (c1 )j+m (c2 )j−m
(44)
√
(j+m0 )!(j−m0 )!
Erweitern mit √
lässt in (44) wieder die nichttransformierten Polynome
0
0
(j+m )!(j−m )!
(40) erkennen.
D-Matrizen
Gleichung (44) lässt sich dann in folgende Matrixgleichung umschreiben
X (j)
(j)
(j)
(j)
fm
≡ fm
(U c) =
Dmm0 (u, v) fm0 (c)
U
m0
13
(45)
mit
(j)
Dmm0
(u, v) =
X
µ
p
(j + m)!(j − m)!(j + m0 )!(j − m0 )!
·
(j + m − µ)!µ!(j − m0 − µ)!(m0 − m + µ)!
0
0
uj+m−µ (u∗ )j−m −µ v µ (−v ∗ )m −m+µ
(46)
den sogenannten D-Matrizen.
Der Aufbau dieser Matrizen erscheint auf den ersten Blick recht kompliziert. Beachtet
man jedoch, dass die Fakultät nur für nicht-negative ganze Zahlen definiert ist, so fällt
die Summe über µ in (46) oftmals schnell zusammen, so dass nur wenige Terme wirklich
berechnet werden müssen.
An Gleichung (45) erkennt man außerdem, dass sich die Polynome zu festem j stets
nur untereinander transformieren, so dass sie als Basis für eine (2j + 1)-dimensionale
Darstellung dienen können.
Die D-Matrizen sind unitär
Um dies einzusehen, betrachten wir das Normquadrat des transformierten Polynomvektors
2j
1
kc1 k2 + kc2 k2
k f (j) k2 =
(2j)!
U
2j 1 X 2j
=
kc1 k2m kc2 k2(2j−m)
(2j)! m=0 m
j
2j
1 X
kc1 k2(m+j) kc2 k2(2j−(m+j))
=
(2j)!
m+j
m=−j
=
j
2j
1 X
kc1 k2(m+j) kc2 k2(j−m)
(2j)!
m+j
m=−j
=
=
j
1 X
(2j)!
kcm+j c2j−m k2
(2j)!
(2j − m − j)!(m + j)! 1
X
m=−j
kcj+m
cj−m
k2
1
2
(j − m)!(j + m)!
= k f (j) k2
m
Das Normquadrat ist invariant, die D-Matrizen somit unitär.
14
(47)
5.3 D-Matrizen sind irreduzibel
(j)
Wir beweisen die Irreduzibilität indem wir aus der Formel für Dm m0 (u, v) zwei Spezialfälle ablesen:
p
X
(j + m)!(j − m)!(j + m0 )!(j − m0 )!
(j)
Dmm0 (u, v) =
·
(j + m − µ)!µ!(j − m0 − µ)!(m0 − m + µ)!
µ
0
0
uj+m−µ (u∗ )j−m −µ v µ (−v ∗ )m −m+µ
(48)
1. Spezialfall
Für m0 = j ergibt sich aufgrund des Faktors µ!(j − m0 − µ)! nur für µ = 0 ein Beitrag
s
(2j)!
(j)
Dmj (u, v) =
uj+m (−v ∗ )j−m
(49)
(j + m)!(j − m)!
Wichtig ist hierbei nur, dass die D-Matrizen im Allgemeinen von Null verschieden sind.
2. Spezialfall
Wähle u = ei
Dann ist
α
2
,
(j)
v = 0.
α
Dmm0 (ei 2 , 0) =
X √...
µ
(j)
...
α
α
0
0
(ei 2 )j+m−µ (e−i 2 )j−m −µ 0µ 0m −m+µ
(50)
α
• für m 6= m0 ist Dmm0 (ei 2 , 0) = 0
• für m = m0 gibt es jedoch für µ = 0 einen Beitrag, da 00 = 1. Der Vorfaktor ist
α
(j)
dann geade 1 und Dmm0 (ei 2 , 0) = eiαm
(j)
α
⇒ Dmm0 (ei 2 , 0) = δmm0 eimα
(51)
Es gibt also auch D-Matrizen, die diagonal sind und auf jedem Diagonaleintrag einen
anderen Wert haben.
Nun fragen wir uns, welche Matrizen mit dem 2. Fall kommutieren. Mit einer Diagonalmatrix mit verschiedenen Diagonaleinträgen kann nur eine weitere Diagonalmatrix
vertauschen. Diese sei mit Amm0 = am δmm0 bezeichnet. Berechnet man nun das (m−j).te
α
α
α
(j)
(j)
(j)
Element von ADmm0 (ei 2 ) bzw. Dmm0 (ei 2 )A, so folgt, wenn A und Dmm0 (ei 2 , 0) kommutieren sollen:
X
X
Amm0 Dm0 j =
Dmm0 Am0 j
(52)
m0
m0
am Dmj
= aj Dmj
(53)
also am = aj , d.h. A muss ein Vielfaches der Einheitsmatrix sein. Daraus folgt dann mit
dem Schurschen Lemma, dass die Darstellung irreduzibel ist.
15
5.4 Einbeziehen der Eulerschen Winkel
Wir hatten in Kapitel 4 gesehen, dass jedem U ∈ SU (2) ein R ∈ SO(3) zugeordnet
werden kann. Parametrisiert man dieses R ∈ SO(3) mit Eulerschen Winkeln, so ist
(eines der möglichen) U ∈ SU (2) gegeben durch
U (R) = ei(ψ
σ
σ
σ3
+θ 22 +φ 23 )
2
(54)
Stellt man das in Cayley-Klein-Parametern dar, so ist
i
i
θ
θ
u
v
(ψ+φ)
(ψ−φ)
mit u = e 2
U (R) =
und v = e 2
cos
sin
∗
∗
−v u
2
2
(55)
Das kann man einfach“ durch Ausführen der Matrixexponentialfunktion nachrechnen.
”
(j)
Setzt man diese u und v in unsere Formel für Dmm0 (u, v) ein, so faktorisiert diese in drei
Teile, die jeweils nur von ψ, φ oder θ abhängen. Die Abhängigkeiten von φ und ψ sind
(j)
einfache Exponentialfunktionen, die von θ ist komplizierter und wird hier mit dmm0 (θ)
bezeichnet.
(j)
(j)
0
Dmm0 (ψ, θ, φ) = eimψ dmm0 (θ)eim φ
(56)
Allerdings bezahlt man für diese Einführung von anschaulichen“ Winkeln einen Preis.
”
Wir haben u und v, also charakterisierende Größen der SU (2), durch Größen mit Eulerschen Winkel, also solche der SO(3) ausgedrückt. Erinnern wir uns an die unterschiedlichen Strukturen dieser beiden Gruppen, so kann/muss eine solche Ersetzung problema(j)
tisch sein. In der Tat ist für halbzahlige j (also auch halbzahlige m, m0 ) Dmm0 (ψ, θ, φ)
zweiwertig“. Das heißt, wenn man im R3 eine Drehung um 2π ausführt (z.B. ψ 0 = ψ+2π
”
(j)
oder φ0 = φ + 2π), so ändert Dmm0 sein Vorzeichen, ist also strenggenommen keine eindeutige Funktion mehr.
(j)
Dmm0 (2π, 0, 0) = (−)2j δmm0
(57)
(j)
Betrachten wir nun dmm0 (θ) genauer:
Explizit ist
p
0
X
(j + m)!(j − m)!(j + m0 )!(j − m0 )!
θ 2j+m −m−2r
(j)
r
cos
dmm0 (θ) =
(−)
(j + m0 − r)!(m − m0 + r)!(j − m − r)!r!
2
r
0
θ m−m +2r
× sin
(58)
2
Durch Einsetzen und Umbenennen der Summationsindizes, bei (61) auch durch Addi(j)
tionstheoreme, beweist man die folgenden Symmetrierelationen von dmm0 (θ) (s. hierzu
auch Vortrag 2):
(j)
0
(j)
dmm0 (θ) = (−)m −m dm0 m (θ)
16
(59)
(j)
(j)
0
d−m0 ,−m (θ) = (−)m −m dm0 m (θ)
(j)
j−m0
dm0 ,−m (θ) = (−)
(60)
(j)
dm0 m (π − θ)
(61)
5.5 Beispiele für D-Matrizen
5.5.1 Allgemeine Form
(0)
D0,0
0
(1)
D 12,− 1
2 2
2
(1)
(1)
D−21 , 1
0
2
D−21 ,− 1
2 2
0
2
2
(1)
(1)
(1)
D1,1
D1,0
D1,−1
0
D0,1
D0,0
D0,−1
0
D−1,1 D−1,0 D−1,−1
0
(1)
(1)
0
0
(1)
D 12, 1
0
0
(1)
(1)
(1)
(1)
0
0
···
(62)
5.5.2 Kugelflächenfunktionen
r
2j + 1 (l)
D0m (0, θ, φ) = Ylm (θ, φ)
4π
(63)
Sei R ∈ SO(3) die Drehung, die die 3-Richtung in Richtung i dreht.
5.5.3 Spinoperator
Es ist σi = D (1/2) (R)† σ3 D (1/2) (R) mit σ3 = diag(1, −1)
Sei z.B. σi = σ1 , d.h. D (1/2) (R) = D (1/2) (0, π/2, 0)
!
1
1
D
(1/2)
(0, π/2, 0) =
√
2
− √12
√
2
√1
2
⇒ σ1 =
0 1
1 0
(64)
5.5.4 Drehimpulsoperator
Genauso: li = D (1) (R)† l3 D (1) (R) mit l3 = diag(1, 0, −1)
Sei li = l2 , also ist D (1) (R) = D (1) (π/2, π/2, 0)
√
i√
2
−i
0
−i
0
√
1
1
D (1) (π/2, π/2, 0) = −i 2
0
−i 2 ⇒ l2 = √ i 0 −i
√
2
2
0 i
0
i
− 2
−i
17
(65)
6 Haarsches Maß
Die hergeleiteten Drehmatrizen haben viele Anwendungen, z.B. in der Kernphysik um
deformierte Kerne zu beschreiben, bei Wellenfunktionen von Molekülen oder bei Streuamplituden für Teilchen mit Spin.
Dabei kommt es vor, dass man über alle möglichen Drehungen R ∈ SO(3) integrieren
muss.
Um das benötigte Integralmaß herzuleiten, benutzt man, dass die Integration über alle
Drehungen invariant sein muss unter einer Drehung des Integranden, also
Z
Z
dR f (R) = dR f (R0 R) mit R0 ∈ SO(3) fest
(66)
Ganz analog ist die Integration über den ganzen Raum unter beliebigen Translationen
invariant.
Das wichtige Ergebnis ist:
Z
dR =
Z
2π
0
Z
π
0
Z
2π
dψ sin θdθdφ
(67)
0
Wendet man diese Integration auf die D-Matrizen an, so findet man:
Z 2π Z π Z 2π
Z
(j)
(j)∗
(j)
(j)∗
dR Dmm0 (R)Dµµ0 (R) =
dψ sin θdθdφ Dmm0 (ψ, θ, φ)Dµµ0 (ψ, θ, φ)
0
=
0
8π 2
2j + 1
0
δjj 0 δmµ δm0 µ0
(68)
In diesem Sinne sind die D-Funktionen orthogonal und können in ein vollständiges,
orthonormiertes System von Basisfunktionen in den Eulerschen Winkeln geschrieben
werden mit
)
(r
2j + 1
Dmm0 (ψ, θ, φ)
(69)
8π 2
18
Literatur
[1] Gottfried, Yan: Quantum Mechanikcs: Fundamentals, 2nd Edition, Springer Verlag
2003
[2] F. Scheck: Theoretische Physik 1, Mechanik, Springer Verlag (2003)
[3] F. Scheck: Theoretische Physik 2, Nichtrelativistische Quantenmechanik, Springer
Verlag (2000)
[4] F. Scheck: Theoretische Physik 4, Quantisierte Felder, Springer Verlag (2001)
[5] Straumann: Quantenmechanik, Springer Lehrbuch (2002)
[6] Edmonds, A.R.: Drehimpulse in der Quantenmechanik, Hochschultaschenbücher Verlag, Mannheim (1964)
[7] Internetquelle:
van
Beveren,E.
http://cft.fis.uc.pt/eef/evbgroups.ps.gz
19
Some
notes
on
group
theory,