Masse Dielektrikum Leiter i u Luft er - antriebstechnik.fh
Werbung

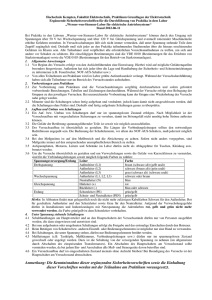
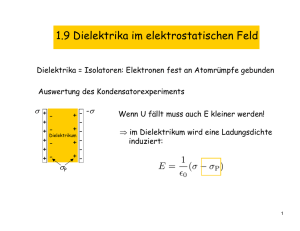
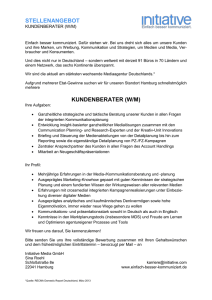
Wichtigste Leitungstypen 9-1 9 Signalübertragung zwischen integrierten Schaltungen 9.1 Wichtigste Leitungstypen Luft i Leiter u er Dielektrikum Masse Ein wichtiger Leitungstyp der Mikroelektronik ist die Mikrostreifenleitung. Sie besteht aus einem Metalleiter (meist Kupfer oder Aluminium) über einem isolierenden Dielektrikum und einer Masseebene, die als Rückleiter fungiert. Das nächste Bild zeigt die Mikrostreifenleitung im Querschnitt mit den gebräuchlichsten Abkürzungen für Leiterdicke T Leiterbreite W Dielektrikumsdicke H W H T er MikrostreifenLeitung 9-2 Signalübertragung zwischen integrierten Schaltungen Während bei der Mikrostreifenleitung der Leiter zwar auf einem Dielektrikum aufgebracht, aber sonst von Luft umgeben ist, wird er bei der Triplateleitung völlig vom Dielektrikum umschlossen. Außerdem befindet sich eine zweite Masseebene oberhalb des Dielektrikums. W H T er TriplateLeitung 9.2 Grundlagen der Signalleitungen Das nächste Bild zeigt einen „Längsschnitt“ eines Verbindungssystems. S i Leiter "Spannungsfront" u0 u v Last R Rückleiter (=Masseebene) 0 x x Es besteht aus drei Teilen: einer Spannungsquelle u0, einem Hin- sowie Rückleiter und einer Last R. Wird der Schalter geschlossen, so liegt die Spannung nicht sofort an der Last an. Vielmehr breitet sich eine „Spannungsfront“ mit einer endlichen Geschwindigkeit v längs der Leitung aus. Das Ausbreitungsverhalten läßt sich mit Hilfe der sog. Leitungsparameter berechnen. Grundlagen der Signalleitungen R’ 9-3 L’ G’ C’ R’: Widerstandsbelag = Widerstand der Leitung pro Längeneinheit [W/cm] L’: Induktivitätsbelag = Induktivität der Leitung pro Längeneinheit [H/cm] C’: Kapazitätsbelag = Kapazität der Leitung pro Längeneinheit [F/cm] G’: (Quer-)Leitwertsbelag = Querleitwert der Leitung pro Längeneinheit [S/cm] R’ und G’ bewirken eine Dämpfung des Signals. Das bedeutet, daß der Spannungshub in Abhängigkeit von der zurückgelegten Leitungslänge sinkt. G’ kann so gut wie immer vernachlässigt werden. Im folgenden wollen wir zunächst auch R’ unberücksichtigt lassen (verlustlose Leitung). Mittels L’ und C’ kann die Ausbreitungsgeschwindigkeit v berechnet werden, und zwar durch v= 1 L’ C ’ c= 1 . ε 0µ 0 Man kann die Mikrostreifenleitung kondensator betrachten; daher gilt: C ’ ≈ ε0ε r W C = H L und L’ ≈ µ 0 näherungsweise als H . W (µr ist bei allen betrachteten Materialien gleich 1.) Berechnet man nun die Signalgeschwindigkeit v, so ergibt sich: Platten- 9-4 v≈ Signalübertragung zwischen integrierten Schaltungen 1 1 . = c0 µ0 ε0εr εr Dabei bezeichnet c0 die Lichtgeschwindigkeit -7 -12 µ0 = 4π×10 H/m und ε0 = 8,85×10 F/m. (3×108 m/s); Eine genauere Betrachtung trägt der Tatsache Rechnung, daß die Welle nicht nur im Substrat, sondern teilweise auch in der Luft propagiert. Bei diesem inhomogenen Dielektrikum ist die relative Dielektrizitätskonstante durch eine effektive Dielektrizitätskonstante εr,eff zu ersetzen v = c0 1 εr,eff 1 ≤ εr,eff ≤ εr . Die Signalausbreitungsgeschwindigkeit ist also von den Geometriedaten unabhängig und gleich der Ausbreitungsgeschwindigkeit einer elektromagnetischen Welle in einem Medium mit der relativen Dielektrizitätskonstanten εr,eff. Das kommt daher, daß sich die Leistung nicht in dem Leiter, sondern im Dielektrikum ausbreitet. Die Leiter „führen“ lediglich die Welle. Hieraus resultiert eine entscheidende Materialanforderung der Verbindungstechnik: Zur Erzielung einer hohen Signalgeschwindigkeit muß die relative Dielektrizitätskonstante des Isolators möglichst niedrig sein! Es folgen Werte für gebräuchliche Dielektrika: Dielektrikum εr SiO2 3,9 Leiterplattenmaterial FR4 5,5 Polyimid 2,5 - 3,9 Al2O3 - Keramik 9,5 Wellenwiderstand und Reflexionen 9-5 9.3 Wellenwiderstand und Reflexionen Wir wollen nun den zu der Spannung u gehörenden Strom i bestimmen. Bewegt sich die Spannungsfront um dx weiter, so muß die Leitungskapazität C’dx aufgeladen werden. Die dazu benötigte Ladung beträgt dQ = uC’dx. Es folgt für den Strom i: i= dQ dx u = uC’ = uC’ v = dt dt Z0 Z0 = mit v= 1 , wobei L’ C’ L’ Wellenwiderstand genannt wird. C’ Der Wellenwiderstand gibt also an, welche Strombelastung eine Leitung bei Ausbreitung eines Spannungsimpulses u erfährt. Seine zentrale Bedeutung gewinnt der Wellenwiderstand aber vor allem durch folgenden Satz: Trifft ein Spannungsimpuls ui von einem Leitungsabschnitt mit Wellenwiderstand Z1 auf eine Last der Größe Z2 oder einen Leitungsabschnitt mit Wellenwiderstand Z2, so entsteht an dem Wellenwiderstandssprung ein reflektierter Impuls mit Spannungshub ur. Der „weiterlaufende“ Spannungsimpuls heißt transmittierte Spannung ut. G ii Z1 ui ur 1+G ir it ut Z2 9-6 Signalübertragung zwischen integrierten Schaltungen Aus den Kirchhoffschen Gesetzen folgt: (1) ui + ur = ut (2) ii - ir = it ⇒ ui ur − = it Z1 Z1 ⇒ ui - ur = Z1it Addiert man die letzte Gleichung zu Gleichung (1), erhält man 2ui = Z1it + ut Das Ende von Leitung 1 kann also modelliert werden als eine Spannungsquelle mit Spannungshub 2ui und Innenwiderstand Z1, welche die Last Z2 treibt. Für die transmittierte Spannung ut ergibt sich damit: ut = Z2 2ui , Z1 + Z 2 für die reflektierte Spannung ur mit Gleichung (1): ur = Z2 − Z1 ui . Z1 + Z2 Man definiert Γ := Z 2 − Z1 . Γ heißt Reflexionskoeffizient. Z2 + Z1 Damit hat man: ur = Γui ut = (1 + Γ )ui − 1 ≤ Γ ≤ +1 1+Γ ist der Transmissionskoeffizient. Es gilt der wichtige Satz: Zur Vermeidung von Reflexionen muß das Verbindungssystem mit einem konstanten Wellenwiderstand Z0 ausgelegt werden! Einschaltvorgang 9-7 Es gibt keine analytischen Ausdrücke für den Wellenwiderstand von rechteckigen Leitergeometrien. Man berechnet Z0 daher mit Hilfe von − analytischen Näherungen − numerischen Verfahren Man wählt meistens Z0 = 50 Ω. Typische Werte einer Polyimidmehrlagentechnologie mit diesem Wellenwiderstand sind (Triplatestruktur): H = 50 µm, W = 20 µm, T = 5 µm. Reflexionen am Leitungsende Sollen am Leitungsende Reflexionen vermieden werden, so muß das Leitungsende mit einem Widerstand abgeschlossen werden, dessen Wert gleich dem Wellenwiderstand ist. Dann ist der Reflexionskoeffizient gleich Null. Bei Leerlauf am Leitungsende beträgt der Reflexionskoeffizient +1, bei Kurzschluß -1. 9.4 Einschaltvorgang Wir betrachten folgende Schaltung: G1=-(2/3) R1(10W ) + u0 - G2=1 Z0(50W) u1 x=0 R2(1kW) x= u2 9-8 Signalübertragung zwischen integrierten Schaltungen Der Impuls u0 „sieht“ den Spannungsteiler aus R1 und Z0, so daß auf der Leitung ein Impuls der Größe u1=(5/6)u0 entsteht. Wir nehmen einen halbunendlichen, rechteckförmigen Spannungspuls an, also einen, bei dem die Anstiegszeit vernachlässigbar klein ist, u0 0 t t=0 und verfolgen die Reflexionen durch Einzeichnen der Spannungspegel. (Im nächsten Abschnitt wird eine weitere graphische Methode zur Konstruktion der Reflexionen dargestellt werden.) u1 ① 2u0 u0 2u0 X= → ③ ② (10/6)u0 x=0 X= u1 u2 u2 2u0 ④ u0 x=0 X= → ⑤ u2 u0 x=0 u2 u0 u0 u1 2u0 u1 2u0 (5/6)u0 x=0 u1 u2 X= x=0 X= Einschaltvorgang 9-9 Die Spannung u2 nimmt damit den in der folgenden Abbildung skizzierten Verlauf. tf (time of flight) bedeutet die Laufzeit des Impulses längs der Leitung der Länge . u2 (10/6)u0 2u0 u0 0 tf 3tf t 5tf u2 führt eine gedämpfte Oszillation aus (Klingeln). Die Über- und Unterschwinger sind erheblich, so daß die Gefahr besteht, daß der Empfänger zwar an-, aber auch sofort wieder ausgeschaltet wird. Dies muß durch passende Abschlüsse auf beiden Seiten der Leitung verhindert werden. Nun betrachten wir statt eines stufenförmigen Impulses einen „trapezförmigen“ Impuls mit einer endlichen Anstiegszeit tr (Flanke). u0 0 tr Wir wollen sogar tr > tf annehmen. u2 u0 0 tf t 9-10 Signalübertragung zwischen integrierten Schaltungen In diesem Fall ist der Verlauf von u2 viel näher an dem von ui. Er ähnelt dem beim Aufladen eines Kondensators. Als Merkregel kann gelten: Für tr ≤ 4 tf muß die Leitungstheorie angewendet werden. Für tr > 4 tf kann die Leitung als Kapazität modelliert werden ohne Berücksichtigung der Laufzeit. 9.5 Das Bergeron - Diagramm R1 + u0 - u1,u2 i1 i2 Z u1 u2 R2 2u1,1 x= x=0 u0 u 1 u1,1 u1 -R1 u1,2 3 Z -Z u2,2 Z 4 2 R2 0 u2 i1,i2 0 tf 2tf 3tf t Unmittelbar nach dem Einschalten wird die Spannungsquelle mit dem Innenwiderstand R1 durch den Wellenwiderstand Z belastet. Im Diagramm für u1 als Funktion von i1 wird der Innenwiderstand durch die Widerstandsgerade mit der Neigung -R1 dargestellt, welche die Spannungsachse bei u0 schneidet. Für den Belastungswiderstand Z erscheint die gestrichelte Gerade mit der Neigung Z durch den Ursprung. u1 und i1 stellen sich auf den Schnittpunkt 1 dieser beiden Geraden ein. Verlustbehaftete Leitungen 9-11 Nach der Laufzeit tf erreichen diese Spannungs- und Stromsprünge das Leitungsende. Gemäß Abschnitt 9.3 kann das Leitungsende als eine Spannungsquelle mit Spannungshub 2u1,1 und Innenwiderstand Z1 dargestellt werden, welche die Last R2 treibt. Im Diagramm von u2 als Funktion von i2 ist die Generatorkennlinie die gestrichelte Linie mit der Neigung -Z und dem Schnittpunkt 2u1,1 mit der Spannungsachse. Die Last wird durch die Gerade mit der Steigung R2 durch den Ursprung dargestellt. u2 und i2 springen nach der Zeit tf auf die Werte im Schnittpunkt 2. Gleich nach Reflexion des ersten rücklaufenden Sprunges am Leitungsanfang stellen sich dort die Spannungs- und Stromwerte des Schnittpunktes 3 ein. Das Bild setzt sich auf diese Weise fort mit Lastkennlinien der Neigung Z für den Leitungsanfang und Generatorkennlinien der Steigung -Z für das Leitungsende, die von Schnittpunkt zu Schnittpunkt mit den Kennlinien für äußere Spannungsquelle und äußere Last gehen. 9.6 Verlustbehaftete Leitungen Wir betrachten den Verlauf eines Rechteckimpulses mit Anfangshöhe 1 längs einer Leitung der Länge mit einem konstanten Wellenwiderstand Z0, die einen nicht zu vernachlässigenden Widerstandsbelag R’ besitzt. U 1 e- a 0 tf t Das Signal breitet sich mit derselben Geschwindigkeit aus wie bei der verlustlosen Leitung. Es wird aber gedämpft und verzerrt. Man definiert als Dämpfung pro Längeneinheit α := R’ 2Z 0 9-12 Signalübertragung zwischen integrierten Schaltungen Nach der Leitungslänge ist die Anfangsflanke des Impulses um den Faktor exp(-α gedämpft. Es folgt ein langsames Ansteigen des Signals. Im Falle eines ausreichend langen Rechteckimpulses (Stufenimpuls) steigt das Signal bis zu 1 an. 9.7 Die stark gedämpfte Leitung Bei einer stark gedämpften Leitung ist der Anfangshub exp(-α ) des übertragenen Impulses klein im Verhältnis zum ursprünglichen Impuls. Die Anstiegszeit muß zu der Laufzeit addiert werden, um die volle Verzögerungszeit td zu erhalten. t d = t f + t r. U2 1 90% 50% 10% tr tf t td tr bezieht sich auf die Zeit zwischen 10% und 90% der Gesamthöhe. Oft kann die Laufzeit sogar vernachlässigt werden. Man spricht dann von einer RC-Leitung. Ein wichtigen Spezialfall bildet die Leitung zwischen zwei CMOSInvertern: Die stark gedämpfte Leitung 9-13 Vcc R0 R’, C’, CIn UIN Ro bezeichnet den „Ausgangswiderstand“ des treibenden Gatters. Darunter soll der gemittelte Ausgangswiderstand im Triodenbereich verstanden werden, und zwar des Last - Transistors bei einem „1-0“ - Übergang von uIn; des Treiber - Transistors bei einem „0-1“ - Übergang von uIn. CIn bedeutet die Eingangskapazität des empfangenden Gatters (CIn ≈ CGateoxid). Dann gilt folgende Näherungsformel: td ≈ tr ≈ 2,3(RoCIn + RoC’ + CInR’ ) + 0,9C’R’ 2 ≈ (2,3Ro + R’ )C’ für CIn < C’ Man sieht, daß der 2- Term zum Tragen kommt, sobald die Leitung eine Länge mit R’ ≈ 2Ro besitzt. Ab dann wächst die Verzögerungszeit mit dem Quadrat der Leitungslänge, so daß es sinnvoll ist, die Leitung mit Hilfe von Zwischenverstärkern (Repeatern) zu unterteilen. 9-14 Signalübertragung zwischen integrierten Schaltungen 9.8 Übersprechen Das folgende Bild zeigt zwei benachbarte Leiter, links einen „aktiven“, rechts einen passiven bzw. „ruhigen“. H I E Man sieht, daß sowohl das elektrische Feld als auch das magnetische in den passiven Leiter bzw. in die passive Leiterschleife hineingreifen. Die beiden Leitungen bilden einen „Kondensator“ und einen „Transformator“. dx (O) L’ 1 Ck’ C’ 3 km := ke := M’ L’ Ck ’ C ’+Ck ’ 2 M’ 4 L’ C’ magnetischer Kopplungsfaktor elektrischer Kopplungsfaktor Übersprechen 9-15 Wir betrachten nun einen trapezförmigen Impuls u1, der auf der aktiven Leitung von 1 nach 2 mit der Geschwindigkeit v läuft. Aufgrund der Kondensator- und Transformatorwirkung erzeugt der Impuls auf der passiven Leitung kapazitive und induktive Spannungsinkremente. Die kapazitiven wandern in beide Richtungen (nach 3 und 4), die induktiven infolge der Lenz’schen Regel nur nach 3. Insgesamt entsteht also eine vorwärtslaufende, mit dem Hauptimpuls synchrone Spannungswelle, deren Inkremente durch dU+ = 1 ∂U1 (k e − k m )dx 2 ∂t gegeben sind, und eine rückwärtslaufende, asynchrone Welle mit den Inkrementen dU− = zum Hauptimpuls 1 ∂U1 (k e + k m )dx 2 ∂t Durch Integration gewinnt man die Vorwärts- und die Rückwärtskopplung. a) Vorwärtskopplung Der vorwärtsgekoppelte Impuls uf läuft auf der passiven Leitung von 3 nach 4 parallel und synchron zu dem Hauptimpuls und gewinnt dabei linear mit der zurückgelegten Strecke an Größe. Dabei wirkt die Vorwärtskopplung wie ein Differenzierglied: Der vorwärtsgekoppelte Puls besteht nur während der Anstiegs- bzw. Abklingzeit des Hauptimpulses. Es gilt uf = k e − k m ∂u1 k e − k m ∂u1 = tf 2v ∂t 2 ∂t Bei dem betrachteten Trapezimpuls ist uf = k e − km t f u10 2 tr ∂u1 u10 ; damit wird = ∂t tr 9-16 Signalübertragung zwischen integrierten Schaltungen u u1 u10 u2 t tf tr uf uf t tf tf + tr - uf Bei Leitungen mit homogenem Dielektrikum (Triplateleitung) sind beide Kopplungsfaktoren ke und km gleich groß; in diesem Fall verschwindet also die Vorwärtskopplung! b) Rückwärtskopplung Am hinteren Ende der passiven Leitung (Punkt 3) baut sich die Rückwärtskopplung ub auf. Es gilt: ub ( t ) = k e + km (u1( t ) − u1( t − 2t f )) 4 u u1 u10 tr u2 t tf ub tf 2tf t Übersprechen 9-17 Ist 2tf größer als die Dauer des ursprünglichen Impulses, so bildet sich am Anfang der ruhigen Leitung eine gedämpfte Form des Urimpulses aus, dem nach 2tf eine negative Kopie folgt. Andernfalls kommt es zu Überlagerungen; für 2tf < tr wird die Amplitude k e + km u10 nicht mehr erreicht. 4 Die Kopplungsfaktoren sind durch ausreichende Abstände zwischen den Leitungen zu begrenzen. Entsprechende geometrische Daten stehen in den Design - Regeln. 9-18 Signalübertragung zwischen integrierten Schaltungen 9.9 Anforderungen an Signalleitungen für mikroelektronische Aufbauten Wir fassen das bisherige zusammen: 1. Geringe Laufzeit tf = εr,eff c0 kurze Leitungslängen geringe relative Dielektrizitätskonstante 2. Geringe Reflexionen Z = RTreiber < trc 0 4 εr,eff Anpassung am Leitungseingang kurze Leitungen 3. Geringe Dämpfung (hochohmiger Leitungsabschluß) u2 = 2u0(Z/(R1+Z))exp(-α ) α = R’/(2Z) hohes Aspektverhältnis kurze Leitungslänge Strom- bzw. Spannungsversorgung 9-19 9.10 Strom- bzw. Spannungsversorgung CMOS - Gatter: VCC Z Maximaler Strom während des Umschaltvorganges: im = VCC/Z Beispiel: Z = 50Ω, VCC = 5V im = 100mA tr = 2ns Dauer des Umschaltvorganges: 2tr i im t tr di/dt = im/tr = 50∗106 A/s 9-20 Signalübertragung zwischen integrierten Schaltungen uCC LCC VCC Z uGND LGND Mit u = L di/dt gilt uGND = LGND di/dt und uCC = LCC di/dt Wir führen das Beispiel fort mit LGND = LCC = 1nH: uGND = LGND im/tr = 50mV uCC = LCC im/tr = 50mV Bei 20 synchron schaltenden Gattern ergibt sich: uGND + uCC = 2V !! Strom- bzw. Spannungsversorgung Bedingungen für eine geordnete Spannungsversorgung − geringe Induktivitäten der Chip-Board - Verbindungen − Gehäuse mit niedrigen Induktivitäten der Anschlüsse verwenden − alternative Chipintegrationsverfahren verwenden − möglichst große Anzahl von Chip-Board - GND und Chip-Board - VCC-Verbindungen − Signalleitungen nahe an Versorgungsleitungen anbringen − kurze Verbindungen − Abblockkondensatoren nahe anordnen − Anzahl der parallel schaltenden Gatter begrenzen 9-21