Künstliche Intelligenz in Computerspielen
Werbung

Thema:
Künstliche Intelligenz in Computerspielen:
Ein regelbasiertes System für ein Jump N
Run Computerspiel
Bachelorarbeit
im Studiengang Angewandte Informatik
der Fakultät Wirtschaftsinformatik
und Angewandte Informatik
der Otto-Friedrich-Universität Bamberg
Verfasser:
Frederic Ehmann
Gutachter: Ute Schmid
Zusammenfassung
In dieser Bachelorarbeit geht es um die Entwicklung eines regelbasierten Systems mit dynamischer Prioritätszuweisung für ein selbst
kreiertes Jump N Run Computerspiel. Hierbei werden Faustregeln definiert, nach denen gehandelt werden soll. Diese Regeln müssen gewisse Vorbedingungen erfüllen, um angewandt werden zu können. Das
System entscheidet dann, je nach Priorität, welche Regel anzuwenden ist. Die Priorität kann von verschiedenen Werten abhängen. Es
wurden auch Regeln erstellt, bei denen es nötig ist, Wege zu planen.
Dazu überführt man den Zustand des Spieles in einen Graphen. Normalerweise kann man den Graphen in der Leveldesignphase manuell
definieren. Doch das Spiel enthält zufällig kreierte Levels, was es nötig macht, die Graphen für die Wegfindung automatisch erstellen zu
lassen. Hierfür werden mehrere Ansätze der automatischen Graphenerstellung durch geometrische Analyse vorgestellt. Es hat sich jedoch
herausgestellt, dass die Benutzung der Regeln mit Wegfindung meist
die Ergebnisse verschlechtert hat. Es ist noch zu erwähnen, dass das
Spiel nicht extra für diese Bachelorarbeit erschaffen wurde, sondern
unabhängig davon. Die theoretischen Grundlagen zu dieser Arbeit basieren im Wesentlichen auf dem ausführlichen Buch Artificial Intelligence For Games [2]. Alternativ könnte man noch das prägnantere
Buch Artificial Intelligence for Computer Games [1] zurate ziehen.
1
Inhaltsverzeichnis
1 Einleitung
1.1 Künstliche Intelligenz oder Intelligente Agenten? . . . .
1.2 Künstliche Intelligenz in Computerspielen . . . . . . .
1.3 Warum eine Künstliche Intelligenz in einem Jump N
Computerspiel? . . . . . . . . . . . . . . . . . . . . . .
1.4 Webseite des Jump n Runs . . . . . . . . . . . . . . . .
1.5 Ausblick auf die folgenden Kapitel . . . . . . . . . . . .
. . .
. . .
Run
. . .
. . .
. . .
2 Theorieteil
2.1 Aufbau einer Künstlichen Intelligenz in Computerspielen
2.2 Movement und Physik in Computerspielen . . . . . . . .
2.2.1 Physik in Computerspielen . . . . . . . . . . . . .
2.2.2 Dimensionen in Computerspielen . . . . . . . . .
2.2.3 Beschleunigung in Computerspielen . . . . . . . .
2.2.4 Gravitation in Computerspielen . . . . . . . . . .
2.2.5 Kollision in Computerspielen . . . . . . . . . . . .
2.3 Pathfinding in Computerspielen . . . . . . . . . . . . . .
2.3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . .
2.3.2 1. Schritt: Graphenerstellung . . . . . . . . . . . .
2.3.3 2. Schritt: Shortest Path Algorithmus . . . . . . .
2.3.4 3. Schritt: Umformung der Lösung in Befehle . . .
2.3.5 4. Schritt: Ausführen von Befehlen . . . . . . . .
2.4 Decision Making in Computerspielen . . . . . . . . . . .
2.4.1 Einleitung . . . . . . . . . . . . . . . . . . . . . .
2.4.2 Decision Trees . . . . . . . . . . . . . . . . . . . .
2.4.3 State Machines . . . . . . . . . . . . . . . . . . .
2.4.4 Behavior Trees . . . . . . . . . . . . . . . . . . .
2.4.5 Fuzzy Logic, Markov Systems . . . . . . . . . . .
2.4.6 Goal-Oriented Behavior . . . . . . . . . . . . . .
2.4.7 Scripting . . . . . . . . . . . . . . . . . . . . . . .
2.4.8 Rule-Based Systems . . . . . . . . . . . . . . . .
2.4.9 Blackboard Architectures . . . . . . . . . . . . . .
3 Eigenes Konzept
3.1 Jump n Run mit zufälligen Levels . . . . . . .
3.2 Automatische Graphenerstellung . . . . . . . .
3.2.1 1. Ansatz: Erreichbarkeit von Objekten
3.2.2 2. Ansatz: Rasterung des Levels . . . .
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
5
.
.
.
6
6
6
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
8
9
11
12
12
13
13
13
15
16
16
16
17
18
18
18
19
19
20
21
26
.
.
.
.
27
27
28
29
30
3.2.3
3.3
3.4
3.5
3.6
3. Ansatz: Dynamische automatische Graphenerstellung und dynamisches Pathfinding . . . . . . . . . .
Pathfinding . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Dijkstra beim 1. Ansatz (Objekterreichbarkeit) . . . .
3.3.2 Gesteuerte Tiefensuche mit A* beim 2. Ansatz (Rasterung) . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.3 Abgeänderter A* beim 3. Ansatz (dynamische Graphenerstellung) . . . . . . . . . . . . . . . . . . . . .
World Interfacing/Perception . . . . . . . . . . . . . . . . .
Decision Making . . . . . . . . . . . . . . . . . . . . . . . .
Regelerstellung . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.1 Grundregeln für ein 2d Sidescroller Jump n Run Computerspiel . . . . . . . . . . . . . . . . . . . . . . . .
3.6.2 Fortgeschrittenere Regeln für ein 2d Sidescroller Jump
n Run Computerspiel . . . . . . . . . . . . . . . . . .
3.6.3 Allgemeine Anmerkungen zu den Regeln . . . . . . .
Action Performer . . . . . . . . . . . . . . . . . . . . . . . .
Perform-Way-Thread . . . . . . . . . . . . . . . . . . . . . .
. 31
. 32
. 32
. 33
.
.
.
.
34
35
35
35
. 36
.
.
.
.
42
46
47
47
4 Evaluation
4.1 Bewertung der praktischen Umsetzung . . . . . . . . . . . . .
4.2 Anwendbarkeit der beschriebenen Elemente . . . . . . . . . .
4.2.1 Regelbasiertes System . . . . . . . . . . . . . . . . . .
4.2.2 Dynamic Rule Arbitration . . . . . . . . . . . . . . . .
4.2.3 Pathfinding . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Typisch auftretende Probleme . . . . . . . . . . . . . . . . . .
4.3.1 Pathfinding ergibt unmögliche Wege . . . . . . . . . .
4.3.2 Pathfinding erkennt gute Wege nicht . . . . . . . . . .
4.3.3 Der Agent kommt bei der Ausführung vom Weg ab . .
4.3.4 Pathfinding dauert zu lange . . . . . . . . . . . . . . .
4.3.5 Pathfinding sprengt den Speicher . . . . . . . . . . . .
4.3.6 Das Ausführen einer Regel schlägt fehl . . . . . . . . .
4.3.7 Endlosschleifen . . . . . . . . . . . . . . . . . . . . . .
4.3.8 Regeln behindern sich gegenseitig . . . . . . . . . . . .
4.3.9 Der Charakter läuft durch Objekte/Kollisionsprobleme
4.3.10 Der Charakter „betrügt“ . . . . . . . . . . . . . . . . .
4.3.11 Der Charakter sitzt fest . . . . . . . . . . . . . . . . .
4.3.12 Ist ein Objekt im Weg / Erreichbarkeit von Objekten .
4.3.13 Der Charakter könnte besser handeln . . . . . . . . . .
4.3.14 Das Hinzufügen der Regel ergibt schlechtere Ergebnisse
48
48
49
49
49
49
50
50
50
51
51
52
52
52
53
54
54
54
55
55
56
3.7
3.8
3
5 Resumé
56
5.1 Erreicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.2 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Literatur
57
4
1
1.1
Einleitung
Künstliche Intelligenz oder Intelligente Agenten?
„Künstliche Intelligenz“ ist in der Computerspieleindustrie noch der allgemein verwendete Begriff, auch wenn es sich eigentlich um „Intelligente Agenten“ handelt. Der Begriff Künstliche Intelligenz hat eine negative Konnotation, seitdem viele leere Versprechungen von den großen Urvätern der Künstlichen Intelligenz gegeben wurden (zum Beispiel [12]). Hier wird Künstliche
Intelligenz als die Realisierung eines autonomen Agenten verstanden, der in
der Lage ist, ein Jump N Run Computerspiel ähnlich wie ein menschlicher
Spieler zu spielen.
1.2
Künstliche Intelligenz in Computerspielen
In Computerspielen wurde Künstliche Intelligenz eigentlich nie als Simulieren
der Gesamtheit eines Menschen (Strong AI, siehe [9]) aufgefasst. Traditionell
wurde die Künstliche Intelligenz einfach nur als eine Möglichkeit gesehen,
mehr Spaß in ein Spiel einzuführen. So ist es oft auch sinnlos, einen Computer
perfekt spielen zu lassen, da das oft den kompletten Spielspaß zerstört. Auf
der anderen Seite empfinden es Spieler als problematisch, wenn ein Computer
etwas extrem „Dummes“ tut. Damit ist zum Beispiel das endlose Laufen
gegen dieselbe Wand gemeint. Brian Reynolds sagte zu diesem Thema:
„Beginnen Sie mit einer simplen Routine, die [...] Einheiten über die Karte wandern lässt [...]. Dann spielen Sie das Spiel [...] und beobachten Sie
die Spielzüge des Computers. Verfolgen Sie das Treiben auf dem Monitor
so lange, bis der Computer etwas wirklich Dummes macht [...]. Nun denken
Sie darüber nach, was a) den Computer dazu veranlasst haben könnte, so
etwas Dummes zu tun, b) was Sie anstelle des Computers getan hätten und
c) welche Informationen ihrer Entscheidung zugrunde lagen. Anschließend
arbeiten Sie die gewonnenen Informationen in ihren Algorithmus ein.“ ([3],
S.219f).
Dies beschreibt vor allem den Anfang der Künstlichen Intelligenz in Computerspielen. Es wurde sozusagen einfach drauflos programmiert und dann
wurde der „Computer“ (oft benutzter Begriff in Computerspielen für eine
Künstliche Intelligenz) beobachtet. Wenn der Computer etwas „Dummes“
tut, wurde der Algorithmus abwechselnd angepasst und getestet, bis der
Computer nichts „Dummes“ mehr macht. Hierbei entsteht natürlich oft sinnloser Code, der schwer noch weiter zu editieren ist. Heutzutage macht man
sich vorher Gedanken, wie man die Programmierung der Künstlichen Intelligenz besser strukturiert.
5
1.3
Warum eine Künstliche Intelligenz in einem Jump
N Run Computerspiel?
Es gibt wenige Versuche einen intelligenten Agenten, beziehungsweise eine
Künstliche Intelligenz in einem Jump N Run Computerspiel spielen zu lassen.
Aber vor allem das zufällige Kreieren der Levels erschwert die Erstellung der
Künstlichen Intelligenz. Somit ist nämlich eine manuelle Vorverarbeitung des
Levels unmöglich. Doch was ist der Zweck einer Künstlichen Intelligenz, die
das Spiel selbst spielt? Nun, obwohl ihm die typische Rolle eines Spielers in
einem Jump N Run Computerspiel genommen wurde, gäbe es verschiedene
Möglichkeiten, das Spiel trotzdem für den Spieler interessant zu machen:
• Man selbst baut Blöcke, um das Level zu verändern, während es gespielt
wird.
• Man hat diverse Möglichkeiten, den Agenten aufzuhalten.
• Man hat diverse Möglichkeiten, dem Agenten zu helfen.
• Es gibt ein Wettrennen.
• Man fungiert als Manager in einem Wirtschaftsspiel.
• Künstliche Intelligenz übernimmt das Spielen nur in gewissen Situationen.
• Zeigen, wie das Level funktioniert.
Das sind nur einige Ideen, wie man eine Künstliche Intelligenz sinnvoll in so
eine Art von Spiel einbauen könnte. Wie sich dieses Spiel genau weiterentwickeln wird, steht zum Zeitpunkt der Niederschrift noch nicht fest.
1.4
Webseite des Jump n Runs
Auf http://www.lernenspielen.com/ ist die aktuellste Version des Jump
n Run Computerspiels verfügbar. Es ist ein Java Applet. Die Steuerung ist
dort erklärt. Vieles, was in dieser Bachelorarbeit beschrieben wird, bezieht
sich auf dieses Spiel.
1.5
Ausblick auf die folgenden Kapitel
In Kapitel 2 ab Seite 7 geht es um grundsätzliche Dinge für Künstliche Intelligenz in Computerspielen, die in der Literatur bereits ausführlich erklärt
wurden.
Folgende Bereiche werden dort abgedeckt:
6
• Der Aufbau einer Künstlichen Intelligenz
• Movement, also die Möglichkeiten zur Bewegung
• Physik, also die Regeln, die für die Bewegung gelten
• Pathfinding, also das Finden von Wegen, beziehungsweise das Bewegen
von einem Punkt zu einem anderen
• Decision Making, also das Treffen von Entscheidungen, vor allem darüber wie gehandelt werden soll, beziehungsweise darüber welche Aktion
ausgeführt werden soll
Das Kapitel 3 ab Seite 27 ist der Kern dieser Arbeit. Es beschreibt ein eigenes
Konzept der Entwicklung einer Künstlichen Intelligenz für ein Jump N Run
Computerspiel. Dabei geht es vor allem um folgendes:
• Das Erstellen zufälliger Levels und die damit nötige automatische Graphenerstellung wird in 3 Pathfindingansätzen beschrieben.
• Es wird kurz darauf eingegangen wie im eigenen Konzept das World Interfacing (Erhalten der Informationen) und das Decision Making (Entscheidungen treffen) implementiert wurden.
• Die erstellten Regeln werden erklärt und es werden Tipps zur Regelerstellung gegeben.
• Es wird auf das Ausführen der Aktionen und der gefundenen Wege
eingegangen.
Kapitel 4 beschreibt ab Seite 48 die Bewertung der praktischen Umsetzung,
Anwendbarkeit der beschriebenen Elemente und dann werden noch viele typisch auftretende Probleme und deren Lösungen beschrieben. Dieses Kapitel
kann als Nachschlagewerk bei Problemen dienen.
Im letzten Kapitel 5 ab Seite 56 wird kurz beschrieben, was erreicht wurde und was noch zu erreichen ist.
2
2.1
Theorieteil
Aufbau einer Künstlichen Intelligenz in Computerspielen
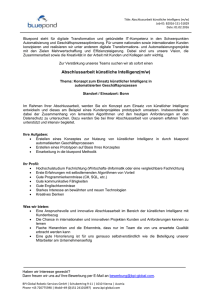
In der Abbildung 1 kann man den typischen Aufbau einer Künstlichen Intelligenz sehen. Das World Interface übergibt Informationen und somit Wissen
7
an die Künstliche Intelligenz. Das Execution Management kontrolliert die
Genauigkeit und die Reihenfolge der Ausführung. Die Group-AI (Künstliche
Intelligenz für Gruppen) enthält die Strategy und beinhaltet die wichtigen Informationen zur Koordination mehrerer unabhängiger Charaktere mit Künstlicher Intelligenz. Die Character AI besteht aus Decision Making und Movement. Also was für Aktionen werden gewählt, wie werden sie gewählt und
aus welchem Grund und weiteres. Die Entscheidungen der Künstlichen Intelligenz werden animiert und haben physikalische Folgen innerhalb des Spiels.
Die Künstliche Intelligenz hat auch einen Einfluss in Content Creation, das
heißt zum Beispiel, dass immer schwerere und komplexere Gegner eingeführt
werden, die Künstliche Intelligenz beinhalten, vor allem in „MMORPGs“
(Massively Multiplayer Online Role-Playing Games) wie World of Warcraft
von Blizzard Entertainment/Blizzard Activision, 2004. Die Künstliche Intelligenz hat auch einen Einfluss auf das Scripting, da man dort meist eine
Künstliche Intelligenz in irgendeiner Form nachbaut, aber auch Techniken
aus der Künstlichen Intelligenz benutzen kann. Weiterführendes gibt es in
[2], auf den Seiten 3-35.
2.2
Movement und Physik in Computerspielen
Um eine Künstliche Intelligenz in einem Computerspiel erstellen zu können, muss man sich zunächst einmal klar machen, was für Möglichkeiten
der Agent, der gesteuert wird, denn besitzen soll. Ein wichtiger Aspekt, den
man beachten muss, ist wie viel die Physik und das Movement (Bewegung)
hierbei eine Rolle spielen, da diese meist den größten Unterschied zwischen
verschiedenen Spielen darstellen. All die Unterschiede in diesen Spielen haben
extreme Auswirkungen auf die Möglichkeiten des Agenten und somit auch
direkt auf die Künstliche Intelligenz. Hier gibt es zum Beispiel den Unterschied, ob man in der Luft noch den Kurs des Fluges ändern kann, oder ist
dieser unveränderbar? Man kann sich zum Beispiel vorstellen, wenn die Flugbahn noch veränderbar ist, muss man weniger im Voraus planen, als wenn
dies nicht der Fall ist.
2.2.1
Physik in Computerspielen
Wenn man eine Künstliche Intelligenz für ein Computerspiel entwickeln will,
sollte man sich im Klaren sein, wie die Physik in dem Computerspiel eingehalten wird. Anhaltspunkte hierfür wären Kräfte, Gravitation, Impulse,
Gesetz der Trägheit, Impulserhaltungssatz, Energieerhaltungssatz, Kollision,
und Weitere. Meist werden Aspekte der Physik nicht, oder nur vereinfacht,
modelliert.
8
Abbildung 1: Aufbau einer Künstlichen Intelligenz in Computerspielen. ([2],
S.9)
2.2.2
Dimensionen in Computerspielen
Zunächst sollte man sich folgende Fragen stellen:
• In wie viele Dimensionen kann sich der Agent denn bewegen?
• Sind diese unterschiedlich oder gleich?
• Gibt es überhaupt so etwas wie Dimensionen zur Bewegung?
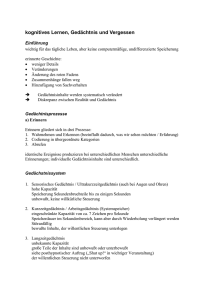
In Abbildung 2 sieht man ein paar verschiedene Ansätze hierzu in Computerspielen.
In dem etwas älteren Computerspiel Pong (Abbildung 2 oben links) ist es
zum Beispiel nur möglich, sich auf dem Bildschirm nach oben und unten zu
bewegen. Der Ball wiederum bewegt sich auch nach links und rechts. Es gibt
aber keine Schwerkraft.
9
Abbildung 2: Dimensionen in Computerspielen.
Das Bild beinhaltet die Spiele/Bilder:
- Pong von Atari, 1972 (oben links)
- Bomberman von Hudsonsoft/Ubisoft, 1983 (oben Mitte)
- Super Mario Land von Nintendo, 1989 (oben rechts)
- Unreal Tournament 3 von Epic Games, 2007 (unten links)
- Flugsimulator [5] (unten Mitte)
- Frei Fliegen [4] (unten rechts)
In den Anfängen der Spielserie Bomberman von Hudson Soft (Abbildung 2
oben Mitte) blickt man von oben auf das Spiel und kann sich horizontal und
vertikal auf dem Bildschirm bewegen, somit sind die zwei Dimensionen sehr
ähnlich, da Schwerkraft keine Rolle spielt. Diese Art von Sicht nennt man
Topdown.
In den Anfängen der Super Mario Serie von Nintendo (Abbildung 2 oben
rechts), was am ehesten dem Spiel entspricht, welches hier später vorgestellt
wird, konnte man sich nach rechts und links frei bewegen, oder nach oben
springen. Diese Ansicht nennt man Sidescroller und das Genre heißt Jump N
Run (teilweise auch Platformer). Man wusste immer, dass sich das Ziel rechts
befindet. In diesem Spielgenre gab es zum ersten Mal Schwerkraft und das
war der Grund, dass sich die Dimensionen nicht mehr ähneln. Meist wurde
die Schwerkraft aber nicht realistisch dargestellt, sondern man konnte linear,
eine Weile nach oben springen und fiel dann wieder linear bis man landete.
Man konnte sich jedoch auch in der Luft nach rechts und links bewegen, wie
10
auf dem Boden auch.
Des Weiteren gibt es heutzutage schon dreidimensionale Computerspiele (Abbildung 2 unten links), in denen realistische Physik immer eine wichtige Rolle
spielt. Ein wichtiges Genre ist hier der 3d Ego Shooter, in dem man sich am
Boden in jede Richtung bewegen kann, wie in einem Topdown Spiel, aber
gleichzeitig hat man die Möglichkeit, wie in einem Sidescroller zu springen.
Somit hat man zwei Dimensionen, die sich funktional gleichen und eine Dimension, die sich von den anderen beiden Dimensionen funktional unterscheidet.
Es wäre auch noch vorstellbar, dass man sich in drei Dimensionen bewegen
kann, die sich von den Eigenschaften her völlig gleichen, ähnlich wie in einem
Flugsimulator (Abbildung 2 unten rechts).
2.2.3
Beschleunigung in Computerspielen
Abbildung 3: Dimensionen in Computerspielen.
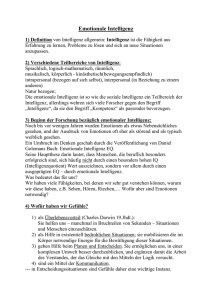
Des Weiteren sollte man sich darüber Gedanken machen, ob Beschleunigung
eine Rolle spielt. Wirkt sich die Beschleunigung langsam auf die Geschwindigkeit aus und verändert diese (Abbildung 3 links) oder gibt es verschiedene
Geschwindigkeiten zwischen denen man beliebig wechseln kann (Abbildung
3 rechts). In dem Computerspiel, das hier vorgestellt wird, ist das Zweite
der Fall. Ansonsten müsste man das sogenannte „Steering Behavoir“ mit be11
trachten, also die Auswirkungen der Beschleunigung auf die Bewegung und
das Planen.
2.2.4
Gravitation in Computerspielen
Ein weiterer Aspekt ist die Schwerkraft beziehungsweise Gravitation. Gibt es
Schwerkraft? Verändert die Schwerkraft langsam die Geschwindigkeit (Abbildung 4 links) oder gibt es nur diskrete Werte? (Abbildung 4 rechts) In
Jump N Runs, wie später hier beschrieben, gibt es meist nur diskrete Werte.
Abbildung 4: Gravitation in Computerspielen.
Dieses Bild beinhaltet die Spiele/Bilder:
- [7] (links)
- Super Mario Land von Nintendo, 1989 (rechts)
2.2.5
Kollision in Computerspielen
Wichtig ist zudem auch die Kollision.
• Prallt man realistisch ab, im Sinne Einfallswinkel gleich Ausfallswinkel?
(Abbildung 5 links)
• Gibt es überhaupt kein Abprallen? (Abbildung 5 Mitte)
• Gibt es einfach nur keinen Durchlass? (Abbildung 5 rechts)
Das Letztere ist in dem Spiel, welches später vorgestellt wird, der Fall.
12
Abbildung 5: Kollisionen in Computerspielen.
2.3
2.3.1
Pathfinding in Computerspielen
Einleitung
In vielen Computerspielen ist das Pathfinding Teil des Spiels selbst. So ist
es zum Beispiel in dem Echtzeitstrategiespiel Starcraft 2 von Blizzard Activision. Hier befiehlt man einer Einheit, sich zu einen bestimmten Punkt
zu bewegen (Abbildung 6 links) und dann wird der kürzeste mögliche Weg
berechnet und ausgeführt (Abbildung 6 rechts). Bei diesen Spielen ist es aber
oft so, dass der Algorithmus mehr Informationen benutzt, als der Spieler haben sollte, was bei den Ansätzen, die hier erklärt werden, nicht der Fall ist.
Für weitere Informationen kann in [2], auf den Seiten S.197-291 nachgeschlagen werden. Das Pathfinding verläuft normalerweise in mehreren Schritten,
die nun vorgestellt werden.
2.3.2
1. Schritt: Graphenerstellung
Das Spielfeld wird in einen Graphen überführt (Abbildung 7 rechts). Hierfür
gibt es extrem viele Möglichkeiten, die je nach Genre passender oder unpassender sind.
Hierbei wird die automatische Graphenerstellung und die manuelle Graphenerstellung unterschieden. Die manuelle Graphenerstellung hat den Vorteil,
13
Abbildung 6: Pathfinding in Computerspielen.
Das Bild zeigt das Spiel StarCraft II: Wings of Liberty von Blizzard Entertainment/Blizzard Activision, 2010.
dass man der Künstlichen Intelligenz sehr genaue Vorgaben geben kann und
somit mehr Kontrolle darüber hat, welche Wege gegangen werden sollten.
Außerdem ist dieser erstellte Graph dann meistens auf Speicher und Zeitverbrauch optimiert.
Der Nachteil ist, dass für jedes Level erst manuell ein Graph erstellt werden
muss und wenn das nicht passiert, ist die Künstliche Intelligenz überhaupt
nicht mehr brauchbar. Weitere Nachteile werden bei [8] beschrieben und sie
werden dort auch in einem Video demonstriert.
In manchen Spielen ist es auch klar, was Spielfelder sind, wie zum Beispiel in
Brettspielen. Hierbei sind die Spielfelder die Knoten und die Möglichkeiten,
sich zwischen diesen Spielfeldern zu bewegen, die Verbindungen der Knoten.
Das kann dann natürlich auch je nach Situation beziehungsweise Figur variieren, wie zum Beispiel beim Schach, bei dem jede Art von Figur andere
Möglichkeiten hat, sich zu bewegen.
In der automatischen Graphenerstellung gibt es zum Beispiel die Möglichkeit, jedes Pixel, beziehungsweise jede Kombination von x,y und z Werten
des Spielfeldes (je nach Dimensionen), als einen Knoten anzusehen. Jede
Möglichkeit, von einem Pixel zu einem anderen zu kommen, wird als eine
Verbindung zwischen diesen Knoten definiert. Jedoch gibt es hier den Nachteil, dass es in den meisten Spielen entweder zu genau und somit ineffizient
ist, teilweise auch gar keinen Sinn macht und oft sehr viel Arbeitsspeicher
verbraucht. Manchmal kann es natürlich auch sinnvoll sein, wenn zum Beispiel das Spielfeld sehr klein ist.
Die nächste Möglichkeit, die eng damit zusammenhängt, ist die Rasterung
des Spielfeldes, so dass zum Beispiel 10x, 10y, 10z Werte eine Rasterung
ausmachen. Hierbei senkt man bei einem dreidimensionalen Spiel immer14
hin die Komplexität auf 0,1%! Der Nachteil ist, dass es keine Möglichkeit
mehr gibt, sehr genau zu arbeiten, denn durch diese Ungenauigkeit können
verschiedene Fälle nicht mehr unterschieden werden. Hierbei könnten gute
Möglichkeiten übersehen werden oder sogar Fehler entstehen. Die Grobheit
der Rasterung ist proportional zur Schnelligkeit und zum Speicherverbrauch
des Pathfindings, aber erhöht auch die Ungenauigkeit. Außerdem muss man
dem Agenten erst beibringen, was unmöglich ist und was nicht. In Kapitel 3
wird ein eigenes Konzept hierzu vorgestellt.
Eine weitere Möglichkeit, der automatischen Graphenerstellung, besteht darin, alle Objekte in der Welt als Knoten und alle Möglichkeiten, von einem
Objekt zum anderen zu kommen, als Verbindungen zwischen den Knoten
anzusehen. Hierfür ist es oft nötig, geometrische Berechnungen einzubauen.
Ein Ansatz hierzu wird in Kapitel 3 vorgestellt. Hierbei ist die durchgezogene Oberfläche jedes Objekts ein Knoten und die Möglichkeit, zwischen den
Knoten zu springen, eine Verbindung (Abbildung 7 links).
Abbildung 7: Graphenerstellung in Computerspielen.
2.3.3
2. Schritt: Shortest Path Algorithmus
Wenn man nun einen Graphen hat, kann man einen Shortest Path Algorithmus anwenden. In Abbildung 8 ist der Dijkstra Algorithmus beschrieben.
Andere Möglichkeiten wären der A*-Algorithmus, Tiefensuche und Breitensuche und einige mehr. Hierzu gibt es reichlich Literatur, da es eine Kernproblematik der Informatik darstellt, deswegen wird hier nicht weiter auf
die Theorie dahinter eingegangen. In Kapitel 3 wird in dem eigenen Ansatz
jedoch noch etwas zur Anwendung der Algorithmen beschrieben.
15
Abbildung 8: Shortest Path Algorithmus. [6]
2.3.4
3. Schritt: Umformung der Lösung in Befehle
Wenn man nun einen Weg hat, mit dem man ans Ziel kommt, muss man
diesen Weg analysieren und in Befehle umformen (siehe Abbildung 9).
2.3.5
4. Schritt: Ausführen von Befehlen
Wenn man den Lösungsweg in Befehle umgeformt hat, können diese nun
ausgeführt werden (siehe Abbildung 10). Hierbei muss folgendes beachtet
werden:
• Was passiert, wenn man außerplanmäßig vom Weg abkommt?
• Was passiert, wenn sich etwas außerplanmäßig im Weg verändert?
2.4
Decision Making in Computerspielen
Decision Making beschreibt die Art, wie Entscheidungen getroffen werden.
Hierbei gibt es verschiedene Modelle, die in [2], auf den Seiten 293-491, beschrieben werden. Es folgt nun eine kurze Einführung in die verschiedenen
Arten von Modellen.
16
Abbildung 9: Lösung in Befehle Umformen in Computerspielen
2.4.1
Einleitung
Es gibt unterschiedliche Ansätze des Decision Makings. Ein wichtiges Unterscheidungsmerkmal ist das Wissen des Agenten. Hierbei lassen sich folgende
Möglichkeiten unterscheiden:
• Er ist allwissend.
• Er weiß, was er sieht.
• Er weiß, was er gesehen hat.
• Auf Grund von Gesehenem, schliesst er auf etwas anderes.
Außerdem lässt sich noch unterscheiden, ob geplant wird oder nur reagiert.
Des Weiteren könnte der Agent lernen. Zusätzlich sollte man wissen, ob die
Künstliche Intelligenz einen Spieler simulieren soll. Hat sie dieselben Möglichkeiten, zu agieren, die auch ein Spieler hat oder besitzt sie eventuell andere
Möglichkeiten, Entscheidungen zu treffen. Um eine Entscheidung zu treffen,
braucht man erst eine Auswahl an möglichen Entscheidungen. Die Aktion,
die durch eine Entscheidung hervorgerufen wird, kann einfach sein, etwa das
Drücken oder Loslassen einer Taste, ähnlich wie beim Spieler, aber auch
komplexere Aktionen, wie das Ausführen eines gefundenen Weges durch Pathfinding. Weiterführendes kann in [2], auf Seite 293-491 nachgelesen werden.
17
Abbildung 10: Befehle Ausführen in Computerspielen
2.4.2
Decision Trees
Bei Decision Trees handelt es sich um Entscheidungsbäume (siehe Abbildung
11). Man stellt sich verschiedene Fragen und je nach Antwort, handelt man.
Dies ist zu vergleichen mit einer „if-then-else“-Verschachtelung. ([2], S.293308)
2.4.3
State Machines
Eine State Machine (siehe Abbildung 12) ist so aufgebaut, dass man sich in
Zuständen befindet und die Zustände durch Events gewechselt werden. Je
nach Zustand wird dann gehandelt. ([2], S.309-333)
2.4.4
Behavior Trees
Behavior Trees (siehe Abbildung 13) sind ähnlich wie Decision Trees, eine
Möglichkeit, eine „if-then-else“-Verschachtelung visuell darzustellen. Der Unterschied zu einem Decision Tree ist nur, dass es sich hierbei um eine Abfolge
von Aktionen handelt. ([2], S.334-370)
18
Abbildung 11: Decision Tree. ([2], S. 297)
2.4.5
Fuzzy Logic, Markov Systems
Bei den Markov Systems handelt es sich um eine Erweiterung der Fuzzy Logic
(siehe Abbildung 14). Wenn bei der Entwicklung der Künstlichen Intelligenz
die Notwendigkeit besteht, Aktionen nicht nur richtig oder falsch zu sehen,
sondern ihnen auch Kommazahlen zuzuweisen, sollte man die Seiten 371-400
in [2] lesen.
2.4.6
Goal-Oriented Behavior
Goal-Oriented Behavior, also sozusagen das zielorientierte Handeln, sieht eigentlich so aus, dass man sich verschiedene Ziele setzt und dann versucht,
diese zu erreichen. Diese Art des Decision Makings wird nur sehr selten in
Computerspielen eingesetzt. Die Ziele eines Agenten sind meistens sehr komplex und sie sind von vornherein klar, so dass sich diese Methode in vielen
Fällen einfach nicht lohnt. Man könnte es allerdings auch so sehen, dass jede
Art von Künstlicher Intelligenz implizit zu dieser Kategorie gehört, nur dass
die Ziele sozusagen fest einprogrammiert sind. ([2], S.401-426)
19
Abbildung 12: State Machine. ([2], S. 310)
2.4.7
Scripting
Beim Scripting handelt es sich darum, dass man die Entscheidungen der
Künstlichen Intelligenz im Vornherein trifft und den computergesteuerten
Objekten ganz genau sagt, was zu tun ist. Hier kann man gleich mehrere
Bedeutungen des Wortes Script anwenden. Einerseits verhält man sich wie
ein Regisseur und gibt dem Agenten genaue Anweisungen, wo er was zu tun
hat. Andererseits kann man auch das aus der Programmierung stammende
„Script schreiben“ als Bedeutung verwenden. Meistens handelt es sich hierbei
um Erweiterungen eines Spieles, die nicht von den Entwicklern des Spiel
selbst geschrieben wurden, oder zumindest auch von einer anderen Person
geschrieben sein könnten.
Ein gutes Beispiel hierfür ist das Entwickeln eigener „Custom Maps“ in den
Blizzard Spielen „Warcraft 3“ und „Starcraft 2“, bei denen sogar neue Genres
entstanden sind. Die wichtigsten dieser neuen Genres sind Tower Defence und
Dota (Defence of the Ancients). Bei der Entwicklung eines Tower Defence
(siehe Abbildung 15) wurde das Grundspiel nur leicht verändert, um ein
völlig neues Genre zu erschaffen. Es wurden alle anderen Gebäude entfernt,
so dass ein Spieler nur Tower bauen kann. Auch wurde die Vielfältigkeit und
20
Abbildung 13: Behavior Tree. ([2], S. 339)
Variation der Tower erhöht. Außerdem werden Gegner an einem Startpunkt
erstellt und laufen einen bestimmten Weg. Diese Gegner sollen aufgehalten
werden, wenn sie aber das Ziel erreichen, verliert der Spieler ein Leben. Das
Ziel des Spiels ist es lange zu überleben und man verliert, sobald die Leben 0
erreichen. Eigentlich handelt es bei Starcraft 2 um ein Echtzeitstrategiespiel.
Doch wenn man diese Karte auswählt, fühlt es sich so an, als würde man
ein ganz anderes Genre spielen, auch wenn nur wenige Eigenschaften durch
Scripts verändert wurden. ([2], S.466-479)
2.4.8
Rule-Based Systems
Ein Rule-Based System (siehe Abbildung 16), also regelbasiertes System besteht aus Rules, einem Arbiter und einer Database. Bei den Rules handelt es
sich um die Entscheidungsmöglichkeiten, die der Agent hat. Der Arbiter ist
die entscheidende Instanz. Die Database enthält das Wissen, das der Arbiter
21
Abbildung 14: Fuzzy Logic, Markov Systems. ([2], S. 375)
benötigt, um die Entscheidungen zu treffen. ([2], S.427-459)
2.4.8.1 Database
Die Datenbank enthält das Wissen des Agenten. Hierbei handelt es sich nicht
immer um vollständiges Wissen, sondern um das Wissen, das der Agent durch
World Interfacing (siehe 3.4 auf Seite 35) von der Spielwelt erhält. Die Datenbank kann logische boolean Werte, aber auch andere Datentypen, enthalten.
([2], S.427-459)
2.4.8.2 Rules
Regeln bestehen aus einer Vorbedingung (Precondition), einer Aktion (Action) und aus einer optionalen Priorität (Priority). Wenn die Vorbedingung
erfüllt ist, wird eine Liste von Bindings zurückgegeben. Diese können vier
Arten von Bindings enthalten:
• false (Die Regel ist nicht anwendbar.)
• true (Die Regel ist anwendbar.)
• Die verschiedenen Wege, die ausgeführt werden können
• Sonstige Unterscheidungsmerkmale, die man braucht, um eine Regel
mehrfach anzuwenden
22
Abbildung 15: Scripting.
Die Bilder stammen aus dem Starcraft 2 Map Editor von Blizzard Entertainment/Blizzard Activision, 2010.
Links sieht man, wie auf einer Map Regionen und Punkte definiert werden.
Rechts sieht man den Editor zum Schreiben eines Scripts.
Beide Ansichten sind Teile des Starcraft 2 Map Editors.
Nun sucht der Arbiter, nach verschiedenen Kriterien, eine Regel mit zugehörigem Binding aus und schickt die Aktion an den Action Performer. Dieser
meldet zurück, wenn die Aktion erfolgreich zu Ende gebracht wurde, oder an
was die Aktion gescheitert ist. Nun werden wieder alle Regeln nach Vorbedingungen überprüft und es geht von vorne los. ([2], S.427-459)
2.4.8.2.1 Precondition
Die Precondition muss erfüllt sein, damit die Aktion ausgeführt werden kann.
Es kann einfache Preconditons geben, die immer wahr sind, wenn zum Beispiel eine Leerlaufaktion mit niedriger Priorität erkennen soll, dass nichts zu
tun ist. Es kann aber auch zum Beispiel die Database gefragt werden, ob
ein gewisser Wert erreicht wurde. Zum Beispiel könnte man einer Regel, bei
der es darum geht, sich Heilung zu besorgen, eine Precondition einbauen,
dass die Leben niedrig sind. Außerdem könnte man verschiedene Bindings an
den Arbiter liefern, wenn die Regel zum Beispiel heißen würde „Sammel ein
Blatt auf “. Dann würde in der Precondition erst überprüft werden, was für
Blätter in der Nähe sind. Als nächstes würden Wege mit dem Pathfinding
gefunden werden und diese Wege würden dann als Bindings zurückgegeben
werden. Doch wenn kein einziger Weg gefunden wird, sind die Preconditions
nicht erfüllt. Wenn die Preconditions nicht erfüllt sind, wird diese Regel auch
nicht beachtet. ([2], S.427-459)
23
Abbildung 16: Rule-Based Systems. ([2], S. 428)
2.4.8.2.2 Action
Die Aktion mit zugehörigem Binding wird an den Action Performer gesendet,
wenn die Precondition erfüllt wurde und der Arbiter diese Regel ausgewählt
hat. Das Ausführen einer Aktion entspricht zum Beispiel dem Drücken oder
Loslassen einer Taste auf dem Keyboard. Es wird natürlich nicht wirklich auf
die Tastatur geklickt, sondern der KeyListener oder MouseListener empfängt
ein dementsprechendes Event, das auch zum Beispiel beim Drücken einer Taste auf dem Keyboard entstehen würde. Dies ist natürlich nur sinnvoll, wenn
der Anspruch ist, einen wirklichen Spieler nachzuahmen. Alternativ können
auch direkt die Eigenschaften des Charakters verändert werden. Allerdings
sollte man sich im Klaren sein, inwiefern der Agent dann die Möglichkeit
besitzt, zu betrügen. Im weiteren Verlauf wird davon ausgegangen, dass das
Senden von Keyboard- und MouseEvents als einzig richtige Lösung anzusehen
ist. Aber eine Aktion muss nicht unbedingt aus dem Senden eines einzigen
Events bestehen. Es gibt auch zum Beispiel die Möglichkeit, dass der Action
Performer einen Weg bekommt, dieser wird an einen „Perform-Way-Thread“
weitergeleitet. Dieser „Perform-Way-Thread“ generiert, je nach momentaner
Position und je nach Weg, immer wieder KeyboardEvents bis das Ende des
Weges erreicht wurde, oder erkannt wird, dass der Weg nicht möglich ist.
([2], S.427-459)
2.4.8.2.3 Priority
Die Priorität einer Aktion ist nur optional und je nach Rule Arbitration (siehe 2.4.8.3 auf Seite 25) vom jeweiligen Binding abhängig. Wenn das Binding
24
besagt, dass die Precondition nicht erfüllt ist, ist die Priorität am besten -1
oder ein anderer absurder Wert. Ansonsten sollte die Priorität der Wichtigkeit der Aktion entsprechen. ([2], S.427-459)
2.4.8.3 Rule Arbitration
Bei der Rule Arbitration geht es darum, welche Kriterien sind entscheidend,
um eine Regel auszuwählen. ([2], S.441-442)
2.4.8.3.1 First Applicable
Die erste Regel, die die Vorbedingungen erfüllt, wird gewählt. Hier ist der
Vorteil, dass man die Reihenfolge der Regeln vorher so setzen kann, dass die
erste Aktion, die die Vorbedingungen erfüllt auch wirklich die Aktion ist, die
dann ausgeführt werden sollte. Ein weiterer Vorteil ist, dass nicht alle Regeln
erst auf Vorbedingungserfüllung überprüft werden müssen. ([2], S.441f)
2.4.8.3.2 Least Recently Used
Die Regeln werden absteigend nach zeitlichem Abstand der letzten Benutzung geordnet und die erste Regel, die die Vorbedingung erfüllt, wird ausgewählt. Der Vorteil hierbei ist, dass verhindert wird, dass ein Agent immer
dieselbe Regel benutzt. Der Nachteil ist, dass nicht beachtet wird, dass eine
Regel eventuell kritischer oder wichtiger ist, als eine andere. ([2], S.442)
2.4.8.3.3 Random Rule
Die Regeln werden zufällig geordnet und die erste Regel, die die Vorbedingung erfüllt, wird ausgewählt. Der Vorteil und Nachteil zugleich ist, dass es
schwer vorhersehbar ist, was der Agent nun auswählen wird. Dies kann je
nach Genre erwünschenswert sein oder auch nicht. Ein reiner Nachteil ist
jedoch, dass nicht beachtet wird, dass eine Regel eventuell kritischer oder
wichtiger ist, als eine andere. ([2], S.442)
2.4.8.3.4 Most Specific Conditions
Eine Regel, die die meisten Einschränkungen in der Vorbedingung hat und
alle Vorbedingungen erfüllt, wird gewählt. Hierbei handelt es sich eigentlich
um ein vorher geordnetes First Applicable. ([2], S.442)
2.4.8.3.5 Dynamic Priority Arbitration
Wenn man die feste Prioritäten für jede Aktion setzt, würde es sich auch um
ein vorher geordnetes First Applicable handeln. Anders ist es jedoch, wenn
man die Priorität der Aktion vom Binding und dem Wissen abhängig macht.
Zum Beispiel ist es wichtiger, sich zu heilen, je weniger Leben man hat. Der
25
Vorteil ist also, dass sich die Priorität einer Aktion abhängig von den Umständen, dem Binding und eventuell auch dem Zufall stetig verändern kann.
Da die Priorität vom Binding abhängt, ist es notwendig, erst die Preconditions aller Regeln zu überprüfen. Danach wird das Binding mit der höchsten
Priorität gewählt und dessen Aktion an den Action Performer gesendet. Diese
Art Regeln auszuwählen, verlangt es, alle Regeln durchzugehen und erfordert
somit eine effiziente Überprüfung der Preconditions. ([2], S.442f)
2.4.9
Blackboard Architectures
Eine Blackboard Architecture (siehe Abbildung 17) ist eine Ansammlung von
mehreren Rule-Based Systems, die jeweils Experten für ein gewisses Fachgebiet darstellen. Ein Arbiter entscheidet, welcher „Experte“ das Sagen bekommt und lässt ihn so lange handeln, bis er die Kontrolle wieder freigibt.
([2], S.459-466)
Abbildung 17: Blackboard Architecture. ([2], S. 460)
26
3
Eigenes Konzept
Das ganze Kapitel bezieht sich auf das Jump N Run Computerspiel, dass
auf http://www.lernenspielen.com/jumpnruntesten.html getestet werden kann. Angewandt wird die Künstliche Intelligenz auf ein Jump N Run
Computerspiel mit zufällig erstellten Levels (siehe Kapitel 3.1 auf Seite 27).
Um Pathfinding in zufälligen erstellten Levels zu ermöglichen, wurden verschiedene Konzepte entwickelt, um automatisch Graphen für das Pathfinding
zu erstellen (siehe Kapitel 3.2 auf Seite 28).
Beim eigenen Konzept handelt es sich um eine Künstliche Intelligenz als
Rule-Based System (siehe Kapitel 2.4.8 auf Seite 21) mit „Dynamic Priority
Arbitration“ (siehe Kapitel 2.4.8.3.5 auf Seite 25).
Es wird auf das Erstellen von Regeln eingegangen und die erstellten Regeln
werden vereinfacht aufgelistet und kommentiert (siehe Kapitel 3.6 auf Seite
35). Auch auf das Decision Making (Entscheidungen treffen), das World Interfacing (Wie erhält die Künstliche Intelligenz das Wissen?) und den Action
Performer (Wie werden Aktionen ausgeführt?) wird kurz eingegangen.
Des Weiteren wird die Anwendbarkeit diskutiert (siehe Kapitel 4.2 auf Seite
49) und es werden die typisch auftretenden Probleme mit Lösungsvorschlägen
aufgezählt (siehe Kapitel 4.3 auf Seite 50).
3.1
Jump n Run mit zufälligen Levels
Das Spiel (http://www.lernenspielen.com/jumpnruntesten.html), auf das
das eigene Konzept angewandt wird, wurde unabhängig von der Bachelorarbeit in Java programmiert. Es geht darum, als eine Art Marienkäfer durch
ein Level zu laufen, wobei dieses Level zufällig erstellt wurde.
Es gibt feste Gegebenheiten für das Level:
• Die erste Wolke, auf der man zu Beginn des Level steht
• Eine Blockade, die verhindert, dass man nicht links aus dem Level
gehen kann
• Eine Art Lava, die sich circa 900 Pixel unter dem Startpunkt befindet
und sich über das gesamte Level erstreckt (Bei Berührung stirbt der
Charakter.)
• Das Finish ist 20000 Pixel vom Startpunkt entfernt.
• Man sieht 1000 mal 1000 Pixel.
27
• Wenn der Charakter stirbt, startet er auf derselben x-Koordinate, auf
der Start-y-Koordinate und ist kurz unsterblich, hat aber ein Leben
weniger. Falls der Charakter kein Leben mehr hat, ist das Spiel vorbei.
Zufällig werden hinzugefügt:
• Wolken, die nicht blockieren, aber den Charakter halten, sofern er sich
darüber befindet
• Holz, das blockiert und den Charakter hält, sofern er sich darüber befindet
• Blätter, die man aufsammeln kann
• 3 Äste, die man aufsammeln kann (Diese sind jedoch nur schwer zu
erreichen.)
• Feuer, das dem Charakter bei Auftreffen alle Blätter entzieht und sie
in der Gegend verstreut (Falls der Charakter hierbei kein Blatt hat,
„stirbt“ er, genau wie in der Lava.)
In diesem Spiel sind Objekte im Level auf einen Bereich verteilt, der sich
über 2000 Pixel hoch und 20000 und mehr Pixel zur Seite erstreckt. Die Levels werden mit steigendem Schwierigkeitsgrad immer länger. Zusätzlich gibt
es mit zunehmenden Schwierigkeitsgrad weniger haltende Objekte und mehr
Objekte, die Schaden zufügen.
Wenn das Ziel in einem Level erreicht wurde, wird der Schwierigkeitsgrad erhöht und man wird in das nächste Level gesetzt. Es gibt theoretisch unendlich
viele Level. Durch das zufällige Erstellen der Levels, kann ein Level mit höherem Schwierigkeitsgrad jedoch leichter zu schaffen sein, als ein anderes mit
niedrigerem Schwierigkeitsgrad.
3.2
Automatische Graphenerstellung
Für die Erstellung der meisten komplexen und planenden Regeln ist es notwendig zu wissen, ob es einen Weg von einem Punkt zu einem anderen Punkt
gibt. Das Pathfinding (siehe Kapitel 2.3 auf Seite 13) liefert dieses Wissen
und gibt sogar den Weg zurück, den man dann später zur Ausführung benötigt. Ein wichtiger Teil des Pathfindings ist die Überführung des Spieles
in einen Graphen (siehe Kapitel 2.3.2 auf Seite 13). Dieser Graph kann normalerweise in der Leveldesignphase manuell definiert werden. Doch dadurch,
dass die Levels erst bei Laufzeit entstehen, ist es notwendig, diesen Prozess
zu automatisieren. Es gibt drei Ansätze für die automatische Graphenerstellung, die an diesem Spiel getestet wurden.
28
Im ersten Ansatz geht es darum, die Objekte als Knoten und die Erreichbarkeit zwischen den Knoten als Verbindungen zwischen den Knoten zu sehen.
Diese Erreichbarkeit wird durch eine optimale Sprungfunktion überprüft. Es
handelt sich hierbei um eine Art Ausschlussverfahren.
Der zweite Ansatz enthält die Rasterung des Levels in jeweils 10 mal 10
Pixel. Als nächstes wird dann überprüft, wie viele Rasterungen das Objekt
schneidet, um diese dann mit den Eigenschaften des Objektes zu versehen.
Der dritte Ansatz erstellt erst beim Pathfinding selbst einen Graphen. So
werden sowohl pixelgenaue Bewegungen, als auch große Bewegungsabläufe,
wie ein kompletter Sprung oder langes Laufen in eine Richtung, in Betracht
gezogen.
3.2.1
1. Ansatz: Erreichbarkeit von Objekten
Objekte entsprechen den Kanten eines Graphen. Die Erreichbarkeit zwischen
Objekten entspricht den Verbindungen zwischen Kanten.
3.2.1.1 Erstellung der Kanten
Bei der Erstellung der Kanten/Knoten eines Graphens (siehe Abbildung 18),
betrachtet man alle möglichen Oberflächen von Objekten, die nicht verdeckt
werden, als eine Kante.
Abbildung 18: Das Erstellen von Knoten
3.2.1.2 Optimale Sprungfunktion
Die optimale Sprungfunktion dient dazu, festzustellen, ob ein Objekt durch
Sprung erreichbar ist oder nicht (siehe Abbildung 19 und Abbildung 20).
Wenn das Objekt sich in dem NICHT ERREICHBAR Bereich befindet, ist
es auf jeden Fall nicht erreichbar und kann somit ausgeschlossen werden.
Wenn es sich in dem VIELLEICHT ERREICHBAR Bereich befindet, ist es
notwendig zu überprüfen, ob ein Objekt (schadend, haltend oder blockend)
die optimale Sprungfunktion bis zu dem zu erreichenden Objekt schneidet.
Dies gilt auch in dem Bereich zwischen der optimalen Sprungfunktion über
29
Abbildung 19: Optimale Sprungfunktion
dem zu erreichbaren Objekt und dem zu erreichbaren Objekt selbst.
Wenn sich ein Objekt im Weg befindet, muss die Funktion angepasst werden
(siehe Abbildung 21).
Wenn also nur ein oder kein Objekt im Weg war, kann man sicher sagen,
dass das zu erreichende Objekt erreichbar ist und man weiß sogar wie. Doch
wenn die abgeänderte Funktion nun wieder geschnitten wird, gibt es überabzählbar viele neue Möglichkeiten, wie die Funktion verändert werden könnte.
Es wurden verschiedene Lösungsmöglichkeiten, für dieses Problem, getestet,
doch keine war so richtig zufriedenstellend, da es bei jedem weiteren Objekt,
das sich im Weg befindet, exponentiell mehr Wegmöglichkeiten wurden.
Außerdem wurde das Springen von unten auf ein Objekt, das sich oben befindet, nicht einbezogen.
Aus den oben genannten Gründen wurde nach einer neuen Möglichkeit des
Pathfindings gesucht.
3.2.2
2. Ansatz: Rasterung des Levels
Die Rasterung des Levels (siehe Abbildung 22) wird jedes mal, wenn ein neues
Objekt entdeckt wird, aktualisiert. Außerdem wird lediglich für jeden Pixelblock (in diesem Fall 10x und 10y Pixel also 100 „xy-Paare“) gespeichert, ob
sich dort ein haltendes, ein blockendes und ein schadendes Element, sowie
ein Blatt oder ein Ast befindet.
Doch da im Voraus festgelegt wird, dass immer 10 mal 10 Pixel betrachtet
werden und nur gespeichert wird, ob sich dort überhaupt mindestens eine
Ausführung von dem jeweiligen Objekttyp befindet, oder eben nicht, hat
man manchmal Ungenauigkeiten, die man dann nur schwer wieder in den
Griff bekommt. In manchen Fällen ist es zu ungenau, in anderen Fällen ist
es dann wiederum zu genau.
30
Abbildung 20: Verlauf der optimalen Sprungfunktion
Das positive an diesem Ansatz ist jedoch, dass er der erste funktionierende
Pathfindingansatz war, der innerhalb der Künstlichen Intelligenz zu einigermaßen guten Ergebnissen führte.
Allerdings hatte das statische Pixelrastern zwei Nachteile: Einerseits war diese Genauigkeit manchmal nicht nötig und somit leidet die Geschwindigkeit
und der Speicherbedarf. Andererseits war es manchmal auch zu ungenau, so
dass Fehler entstanden, die schwierig in den Griff zu bekommen sind.
Zwar wurden die Fehler größtenteils beseitigt, aber dann kam die Frage auf,
warum man eigentlich so an diesen 10 mal 10 Pixeln festhält.
Besser wäre doch ein dynamisches System, das je nach Bedarf die Genauigkeit
verändern kann. Somit könnte man Speicherbedarf, Zeitbedarf und Genauigkeit für jeden Abschnitt so optimieren, dass man viel bessere Ergebnisse
erzielt. Die Lösung sollte die Entwicklung einer dynamischen automatischen
Graphenerstellung sein.
3.2.3
3. Ansatz: Dynamische automatische Graphenerstellung und
dynamisches Pathfinding
Die dynamische automatische Graphenerstellung (siehe Abbildung 23) macht
sich Bewegungsmuster zu nutze, die oft auftreten. So wird von jedem Punkt
aus nicht nur der nächste Pixel oder Pixelblock überprüft, sondern es werden
auch typische Bewegungsabläufe als mögliche nächste Aktion gesehen.
Man erhält dabei eine viel größere Anzahl an möglichen nächsten Aktionen.
Um es am Beispiel des „Nach Rechts Springens“ einmal anzudeuten, gibt es
31
Abbildung 21: Veränderung der optimalen Sprungfunktion
viele mögliche Genauigkeiten einen Sprung zu überprüfen. So kann man zum
Beispiel erst überprüfen, ob sich ein Objekt im Weg befindet, wenn man den
kompletten Sprung durchführen will (nur den Weg nach oben, noch nicht das
Fallen). Als nächstes verringert man die Länge des Sprunges bis kurz davor,
und setzt das als einen neuen Knoten im Pathfinding fest. Außerdem werden
auch 50% des Sprunges, 10% des Sprunges, 5% des Sprunges, und 1 Pixel
des Sprunges als Knoten hinzugefügt. Dies erfolgt nach Überprüfung, ob der
Weg möglich ist. Hierbei sollte auch überprüft werden, ob der Weg schon in
der Liste an möglichen Wegen enthalten ist. Außerdem sollte man noch nach
Zyklen prüfen.
Um es noch weiter am Beispiel „nach rechts laufen“ auszuführen, kann man
folgende Fälle unterscheiden: 1000, 400, 100, 50, 10, 5 oder 1 Pixel nach
rechts laufen. Bei jeder Aktion wird an jedem Zwischenpunkt überprüft, ob
sich etwas im Weg befindet oder die Aktion aus sonst einem Grund nicht
mehr möglich ist. Das Ende der Aktion wird dann auf die mögliche Aktionslänge reduziert. Falls dadurch dann Knoten entstehen, die sich gleichen, wird
natürlich nur einer davon genommen.
Dieser Graph wird jedoch im Gegensatz zur Graphenerstellung durch Rasterung des Levels erst dynamisch zum Pathfinding erstellt, was die Dauer des
Pathfindings je nach Implementation eventuell erhöhen kann.
3.3
3.3.1
Pathfinding
Dijkstra beim 1. Ansatz (Objekterreichbarkeit)
Es wird überprüft, auf welchem Objekt sich der Spieler befindet und der dazugehörige Knoten wird als Anfangsknoten gewählt. Nun wird der Dijkstra
32
Abbildung 22: Veranschaulichung der Rasterung eines Spielfeldes.
Hier kann man zum Beispiel sehen, dass sich in B1 und C2 jeweils ein rotes
und ein braunes Objekt befindet. Man kann jedoch nicht mehr rekonstruieren, ob sich das Objekt überhaupt erreichen lässt.
Algorithmus angewandt. Bei jedem Schritt wird auch überprüft, ob man von
dem momentanen Objekt direkt zum Ziel des Pathfindings springen kann.
Wenn dies der Fall ist, wird der Weg gespeichert und zurückgegeben. Dieser
Weg wird dem Arbiter dann als Binding übergeben. Der Dijkstra Algorithmus selbst wird hier als Wissen vorausgesetzt, da es sich um einen zentralen
Aspekt der Informatik handelt.
3.3.2
Gesteuerte Tiefensuche mit A* beim 2. Ansatz (Rasterung)
In „javaähnlicher“ Form auf den Punkt gebracht, wie es ungefähr aussehen
sollte:
33
Abbildung 23: Veranschaulichung der Wegmöglichkeiten des dynamischen
Pathfindings.
pathfinder ( Ort ort , Ort to ){
if ( ort != to ){
try {
A *( ort , to );
} catch ( St ac kO ve rF lo wE rr or e ){
}
for ( each direction i ){
isPossible ( neuerOrtDurch ( i )){
pathfinder ( neuerOrtDurch ( i ) , to );
}
}
}
}
Die richtige Auswahl der Richtungen ist hier extrem wichtig. Der A* Algorithmus selbst wird wie der Dijkstra Algorithmus als Wissen vorausgesetzt.
3.3.3
Abgeänderter A* beim 3. Ansatz (dynamische Graphenerstellung)
Erst erstellt man für einen Knoten alle Folgeknoten, wie in Kapitel 3.2.3 auf
Seite 31 beschrieben. Nun könnte man den normalen A* Algorithmus verwenden und den nächsten besten Knoten mit einer unterschätzenden Heuristik
und einer bisherigen Wegberechnung bestimmen. Doch in diesem Fall würde das zu einer Menge Overhead führen, denn eigentlich ist der Sinn, dass
34
die ungenauen Knoten viel priorisierter expandiert werden, als die genaueren
Knoten. Also ist es notwendig, dass der bisherige Weg viel weniger gewichtet
wird, als die Heuristik des noch ausstehenden Weges. Eine mögliche Ausführung wäre dies:
P
Bisheriger Weg:
2 · max (x,y) + 1 · min (x,y) + 1
T eilabschnitte
Restheuristik:
10 · max(x,y) + 5 · min (x,y)
Erklärung: x (y) ist der x- (y-) Abstand, der in den jeweiligen Teilabschnitten des bisherigen Weges zurückgelegt werden musste. Bei der Restheuristik
ist x (y) der Abstand, zwischen der zu erwartenden Position und dem Ziel.
Nun zählt man für jeden neuen Knoten den bisherigen Weg und die Restheuristik zusammen und fügt sie der Liste noch zu expandierender Knoten hinzu.
Der Knoten der Liste mit dem niedrigsten Wert wird expandiert. Expandierte
Knoten werden aus der Liste entfernt.
3.4
World Interfacing/Perception
Das World Interfacing erfolgt dadurch, dass zu jedem Frame überprüft wird,
welches Objekt vom Spieler zur Zeit gesehen wird. Diese werden an die Database der Künstlichen Intelligenz gesendet und dort, je nach Verwendungszweck, verarbeitet.
3.5
Decision Making
Das Decision Making basiert auf dem, im Theorieteil erwähnten, Rule-Based
System (siehe Kapitel 2.4.8 auf Seite 21) mit „Dynamic Priority Arbitration“ (siehe Kapitel 2.4.8.3.5 auf Seite 25). Die Priorität der Regeln hängt
von verschiedenen Werten und auch vom Zufall ab. Doch wenn die Priorität gleich ist, wird zufällig eine Regel mit einem Binding ausgewählt. Auch
das Konzept der Bindings wurde eingeführt, mit dem man mehrere Arten
erlauben konnte, eine Regel auszuführen. So wird zum Beispiel bei „ein Blatt
einsammeln“ in der Precondition jedes Blatt in der Nähe geordnet und dann
nacheinander ein Weg dazu gesucht. Zusätzlich werden Objekte kurzzeitig
deaktiviert, wenn das Pathfinding fehlschlägt.
3.6
Regelerstellung
Zunächst wurden grundsätzliche Regeln erstellt, wie „Nach Rechts Laufen“,
„Springen“ und „Rennen“. Erst dann wurde das System getestet. Falls sich
35
der Agent jedoch anders verhält, als er sollte, wird eine neue Regel hinzugefügt, die womöglich dieses Verhalten simulieren könnte.
3.6.1
Grundregeln für ein 2d Sidescroller Jump n Run Computerspiel
In einem Jump n Run gibt es ein paar grundlegende Faustregeln, die fast
immer gelten:
• Rennen: Man sollte immer rennen, wenn dies möglich ist.
• Nach rechts bewegen: Man sollte meistens nach rechts laufen, wenn
dies sinnvoll ist.
• Springen: Wenn rechts ein Abgrund oder ein Hindernis ist, ist es meistens sinnvoll zu springen.
• Fallen lassen: Wenn man fällt oder fliegt und sich ein sicher zu erreichendes Objekt unter einem befindet, sollte man sich meistens fallen
lassen.
• Schadende Objekte meiden: Es ist meistens besser, schadende Objekte zu umgehen.
Diese einfachen Regeln ergeben schon eine relativ umfassende Künstliche Intelligenz, die in sehr vielen Fällen zu guten Ergebnissen führt. Natürlich muss
man noch bei jedem Spiel die Besonderheiten des Spiels oder des Levels mit
beachten und eventuell weitere Regeln erstellen. Einige Regelansätze für typische Probleme werden im Folgenden etwas ausführlicher beschrieben.
3.6.1.1 Einfache Regeln (essentiell und effizient)
Name: Rennen
Precondition: Rennen ist nicht angeschaltet
Action: Rennen anschalten
Priority: 100
Bewertung und Kommentare zur Regel „Rennen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. In diesem Spiel ist es eigentlich nie sinnvoll, nicht zu rennen.
Der „Rennen-Modus“ wird also automatisch angeschaltet und bleibt für den
36
Rest des Spiels bestehen. Dies geschieht, indem ein „Shift-Button-PressedEvent“ an den KeyListener gesendet wird. Da es hier keine Beschränkung
gibt, macht es auch keinen Sinn, zu sparen oder ähnliches. Das kann natürlich in einem anderen Spiel anders aussehen. Wenn es zum Beispiel Kosten
für das Rennen gibt, ist es noch abzuwägen, ob dies in dieser Situation sinnvoll ist. Auch das Abschalten des Rennens müsste dann in Betracht gezogen
werden.
Name: Nach rechts laufen
Precondition:
• Rechts ist nichts im Weg, was blockiert und
• rechts ist nichts Schadendes im Weg und
• rechts ist kein Abgrund
Action: Nach rechts laufen
Priority: 2
Bewertung und Kommentare zur Regel „Nach rechts laufen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. Dies ist damit zu begründen, dass sich das Ziel immer rechts
befindet. Also ist es normalerweise sinnvoll, sich nach rechts zu begeben.
Übrigens ist diese Regel auch in der Luft anwendbar und bezieht sich somit
nicht nur auf das Laufen, sondern auch auf das Springen, Fliegen und Fallen
nach rechts. Normalerweise ist es zwar sinnvoll nach rechts zu laufen, außer
wenn sich dort ein schadendes Objekt befindet. Es wird nicht nach rechts
gelaufen, wenn sich dort etwas Blockierendes befindet, da dies durch das Spiel
ohne Nachteil sowieso verhindert wird. In diesem Fall dient das Verhindern
der Regel eigentlich nur dazu, der Leerlauf-Regel Raum zu bieten.
37
Name: Springen
Precondition:
Positiv:
Negativ:
• Rechts ist ein Abgrund oder
• rechts blockiert etwas den Weg
oder
• rechts ist etwas Schadendes im
Weg
• oben ist etwas, was blockiert
oder
• oben ist etwas, was schadet
oder
• man befindet sich schon in der
Luft
Action: Springen
Priority: 100
Bewertung und Kommentare zur Regel „Springen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle Regel handelt. Das Springen über ein Hindernis oder eine Lücke ist ein
wichtiger Teil in jedem Jump N Run und kann, bis auf wenige Ausnahmen,
als eine gute Faustregel angewandt werden. Die Ausnahmen, die dann für
das jeweilige Spiel gelten, müssen hier mit modelliert werden.
Name: Sich fallen lassen
Precondition:
Positiv:
Negativ:
• Der Spieler fällt oder gleitet.
• Der Spieler ist über einem haltenden Objekt.
• Das Objekt ist „relativ“ nah.
• Zwischen dem Spieler und dem
haltenden Objekt befindet sich
etwas schädliches.
• Es ist unmöglich von dem haltenden Objekt weiterzukommen.
Action: Fallen lassen
Priority: 10
Bewertung und Kommentare zur Regel „Sich fallen lassen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle Regel handelt. Das „Sich fallen lassen“ entscheidet manchmal darüber,
38
ob man ein hohes Objekt erreicht oder nicht. Es ist oft sinnvoller, wenn man
schon fällt, einen kleinen Abstand nach unten zu fallen, um von dort wieder
abzuspringen, wenn man dann insgesamt höher kommen wird, als ohne dies
zu tun.
Name: Gleiten/Fliegen
Precondition:
Positiv:
Der Spieler fällt
Negativ:
• Der Wechsel in den Fliegen Modus würde dem Spieler schaden (Kollisionsveränderung).
• Der Spieler lässt sich absichtlich fallen.
Action: Gleiten/Fliegen anschalten
Priority: 10
Bewertung und Kommentare zur Regel „Gleiten/Fliegen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. Diese Regel ist sicherlich nicht für jedes Spiel anwendbar, da
es sich um eine Spezialität dieses Spiels handelt. Die Regel des „Gleitens/Fliegens“ kann natürlich auch weggelassen werden, wenn sie nicht anwendbar
ist. Doch bei diesem Spiel ist es, bis auf wenige Ausnahmen, immer sinnvoller
zu Gleiten/Fliegen, als zu Fallen, da man eine größere Distanz überwinden
kann.
Name: Gleiten/Fliegen um nicht von unten in Feuer zu springen
Precondition: Spieler springt und befindet sich unter Feuer
Action: Gleiten/Fliegen anschalten
Priority: 10
Bewertung und Kommentare zur Regel „Gleiten/Fliegen um nicht
von unten in Feuer zu springen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. Wenn der Spieler sich direkt unter Feuer befindet und springt,
kann der unmittelbare Zusammenprall damit verhindert werden, dass der
Spieler in den Gleiten/Fliegen Modus wechselt, da er ab dann nicht weiter
an Höhe gewinnt. Diese Regel ist nicht in jedem Spiel möglich und man muss
39
sich somit eine andere Möglichkeit überlegen, Feuer zu vermeiden, wenn dies
nicht möglich ist, je nach Spiel.
Name: Aufhören nach rechts zu laufen
Precondition: Spieler ist links neben Feuer
Action: Nach rechts Laufen ausschalten
Priority: 20
Bewertung und Kommentare zur Regel „Aufhören nach rechts zu
laufen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. Da die Künstliche Intelligenz in diesem Spiel nicht aufhört,
nach rechts gedrückt zu halten, ist es notwendig, einen „Button-ReleasedEvent“ zu senden, um zu verhindern, dass der Spieler in ein schadendes Objekt läuft.
3.6.1.2 Kompliziertere Regeln (essentiell, aber eventuell ineffizient)
Die folgenden Regeln sind zwar komplizierter zu implementieren, aber wenn
sie fehlerfrei und effizient implementiert werden, können sie eine effektive Erweiterung des Regelsatzes darstellen.
Name: Nicht von oben in ein schadendes Objekt fliegen
Precondition: Spieler fällt oder fliegt/gleitet mit dem Kurs auf ein schadendes Objekt
Action: Finde einen alternativen Weg, bei dem man nicht auf ein schadendes
Objekt fliegt.
Priority: 100
Bewertung und Kommentare zur Regel „Nicht von oben in ein
schadendes Objekt fliegen“:
Es handelt sich zwar theoretisch um eine essentielle Regel, aber der Ansatz
hat sich in der Praxis als fehlerhaft erwiesen. Die Regel wurde beim Testen
in falschen Situationen angewandt und es gab enttäuschende Ergebnisse. Es
hatte meist zur Folge, dass alle Leben an einer Stelle verloren wurden. Es handelt sich sicher um einen guten Gedanken, nur die Umsetzung müsste noch
verbessert werden. Die richtige Erkennung, wann der Spieler in Feuer springen würde, sowie die effiziente Findung einer Alternative ist hierbei essentiell.
40
Name: Leerlaufregel
Precondition: Keine
Action: Einen Counter hochzählen
Priority: 1
Bewertung und Kommentare zur Regel „Leerlaufregel“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. Die Leerlaufregel ist dazu da, um zu erkennen, wie lange der
Charakter schon festsitzt und nichts tun kann. So kann man je nach Spiel
folgende Aktionen in Betracht ziehen:
• Nach längerer Zeit alternative Routen finden
• die Richtung wechseln
• absichtlich Suizid begehen, um weiterzukommen
• Fähigkeiten benutzen
• Es bestehen noch viele andere Möglichkeiten, die man je nach Besonderheiten des Spieles anwenden könnte.
Name: Finde einen neuen Weg
Precondition: Der „Leerlaufregelcounter“ erreicht ein gewisses Level. Nun
werden Wege gesucht, mit denen man eine bessere Position erreichen könnte.
Action: Den gefundenen Weg ausführen
Priority: Die Priorität muss je nach erreichbaren Punkt variieren und ist
meistens anderen Regeln zu bevorzugen.
Bewertung und Kommentare zur Regel „Finde einen neuen Weg“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. Zwar wurde beim Testen oft keine gute Alternative gefunden.
Falls sich dennoch eine (brauchbare) Alternative finden lässt, ist es eine große
Bereicherung, da man auch einer Lage entfliehen kann, aus der man sonst
eventuell nicht herauskommen würde.
Name: Nach links laufen
Precondition: Der „Leerlaufregelcounter“ erreicht ein gewisses Level.
Action: Iterativ probieren, sich immer mehr nach links zu bewegen und es
dann von dort erneut probieren, bis man an dem Ort vorbeigekommen ist, an
dem man stecken geblieben ist.
Priority: Die Priorität ist abhängig vom „Leerlaufregelcounter“.
41
Bewertung und Kommentare zur Regel „Nach links laufen“:
Es hat sich beim Testen herausgestellt, dass es sich hierbei um eine essentielle
Regel handelt. In sehr vielen Situationen hat diese Regel gereicht, um nicht
stecken zu bleiben. Diese Regel sollte abwechselnd mit der „Finde Einen Neuen Weg“ Regel angewandt werden, in dem Fall, dass man nicht weiterkommt.
Praktisch wurde es so umgesetzt, dass der „Leerlaufregelcounter“ nach unten
gezählt wurde bis 0 erreicht wird. Als nächstes wurde ein Counter hochgezählt, für wie oft man stecken geblieben ist, und somit die Zeit, die man sich
nach links bewegt hat, iterativ steigt.
Name: Aus einem Käfig befreien
Precondition: Befindet sich der Spieler an einem Ort, aus dem er in keine
Richtung unbeschadet herauskommt, dann finde einen Weg, mit dem man
minimalen Schaden erleidet, aber sich aus der Lage befreien kann.
Action: Begehe den gefunden Weg.
Priority: Priorität ist abhängig vom erlittenen Schaden und ob man wirklich
aus der Situation herauskommt.
Bewertung und Kommentare zur Regel „Aus einem Käfig befreien“:
Es hat sich beim Testen herausgestellt, dass es sich zwar um eine essentielle Regel handelt, aber die Ausführung funktionelle Fehler hatte. Somit war
es besser, diese Regel nicht einzubauen, da sie oft zu Fehlern geführt hat.
Es wurde von der Künstlichen Intelligenz manchmal fälschlicherweise davon
ausgegangen, dass es keinen Ausweg gibt, obwohl das nicht der Fall war. Es
handelt sich zwar um einen guten Gedanken, nur die Umsetzung müsste noch
verbessert werden.
3.6.2
Fortgeschrittenere Regeln für ein 2d Sidescroller Jump n
Run Computerspiel
Diese Regeln könnten je nach Art des Spiels nützlich sein, sind aber nicht
zwingend erforderlich. Oft ändert es nichts an dem Erfolg des Spielers. Doch
wenn es zum Beispiel die Vorgabe gibt, dass bestimmte Dinge aufgesammelt
werden müssen, ohne die es nicht weitergeht, gäbe es hier entsprechende Regelansätze, die dafür eventuell hilfreich sind.
42
Name: Einen essentiellen Gegenstand aufsammeln
Precondition: Man befindet sich an einem sicheren Ort und es gibt einen
Weg zu einem essentiellen Gegenstand
Action: Führe den Weg aus
Priority: Extrem hoch, je nach Gefahr auf dem Weg und Wert des Gegenstandes
Bewertung und Kommentare zur Regel „Einen essentiellen Gegenstand aufsammeln“:
Ein Problem hierbei ist, wann die Regel nicht angewandt werden soll. Da
durch sie die Performance extrem reduziert wird, wenn nach jedem Schritt
überprüft wird, ob es einen Weg zum essentiellen Objekt gibt. Beim Testen
der Regel gab es oft Endlosschleifen oder extreme Performance Probleme. Es
ist hierbei essentiell, dass das Pathfinding in jeder Situation perfekt funktionieren können muss. Im Rastersystem ist dies zum Beispiel teilweise einfach
zu ungenau, um eindeutig zu sagen, ob es auf jeden Fall möglich ist. Doch
eine genaue Berechnung wäre oft zu aufwändig. Eine effiziente und korrekte
Lösung für dieses Problem ist eine echte Herausforderung. Wenn diese Probleme behoben wären, wäre es jedoch eine große Bereicherung für den Regelsatz.
Name: Einen helfenden Gegenstand aufsammeln
Precondition: Man befindet sich an einem sicheren Ort und es gibt einen
Weg zu einem helfenden Gegenstand
Action: Führe den Weg aus
Priority: Je nach Position, die man für das Aufsammeln aufgeben muss und
je nach Wichtigkeit des Gegenstandes
Bewertung und Kommentare zur Regel „Einen helfenden Gegenstand aufsammeln“:
In dem Spiel, um das es hier geht, handelt es sich bei diesen Gegenständen
um Blätter. Diese können eingesammelt werden, um sich Leben dazuzuverdienen. Außerdem verliert man alle Blätter, statt ein Leben, falls man Blätter
hat und Schaden nimmt. Wenn man kein Blatt hat und Schaden nimmt, verliert man ein Leben.
Also ist es oft nicht sinnvoll, eine starke Position aufzugeben, um ein Blatt
aufzusammeln. Aber wenn man dabei nichts verliert, ist es immer sinnvoll
es zu tun. Wenn man für einen Gegenstand eine gute Position aufgibt, muss
man abwägen, ob er das wert ist.
Ein wichtiges Kriterium für den Erfolg dieser Regel ist also das richtige
„Nichtanwenden“ dieser Regel. Wenn sie nämlich in risikoreichen Situationen angewandt wird, hat das oft fatale Folgen. Die Regel hat beim Testen
43
oft dazu geführt, dass die Position verschlechtert wurde und somit der Spieler
zum Beispiel in die Lava fiel, nachdem er das Blatt aufgesammelt hat. Es ist
also notwendig, eine Art Risikobewertung in diese Regel einzuführen. Wie
risikofreudig man ist, entscheidet über Erfolg und Misserfolg dieser Regel.
Beim Testen wurden sowieso genug Blätter zufällig aufgesammelt, wenn sie
einfach ignoriert wurden und wenn sie zufällig auf dem Weg waren, so dass
es bessere Ergebnisse ohne diese Regel gab, als mit. Es ist eine Herausforderung, diese Regel so zu gestalten, dass sie wirklich einen Nutzen bringt.
Aber wenn die Regel gut, effizient und korrekt arbeitet, sollte sie eine große
Bereicherung für den Regelsatz darstellen.
Name: Einen helfenden Gegenstand aus der Luft aufsammeln
Precondition: Man befindet sich in der Luft und es gibt einen kurzen Weg
zu einem helfenden Gegenstand
Action: Führe den Weg aus
Priority: Je näher desto höher
Bewertung und Kommentare zur Regel „Einen helfenden Gegenstand aus der Luft aufsammeln“:
Hier ist das richtige „Nichtanwenden“ der Regel eine der größten Herausforderungen. Wenn sie nämlich in zu risikoreichen Situationen angewandt wird,
verliert der Spieler zu viel Position und kann somit manche Orte eventuell
nicht mehr erreichen oder verliert sogar ein Leben. Auch sollte die Berechnung des Weges nur in der Ausnahme ausgeführt werden, da die Zeit in der
Luft für Berechnungen extrem begrenzt ist. Denn wenn man während der Berechnung auch nur einen Pixel nach unten fällt, könnte der Weg nicht mehr
gültig sein. Allgemein ist diese Regel sehr vorsichtig zu benutzen, da sie die
Qualität des Regelsatzes extrem verschlechtern kann, wenn sie nicht effizient
und korrekt implementiert wird.
Name: Die Distanz zu einem essentiellen Gegenstand verringern
Precondition: Der Spieler befindet sich zu weit weg, um einen essentiellen
Gegenstand direkt zu erreichen. Aber es gibt eine Möglichkeit, näher an diesen
Gegenstand zu kommen.
Action: Den Weg ausführen
Priority: Je näher man an dem essentiellen Gegenstand ist, desto höher die
Priorität. Aber sie sollte niedriger sein, als die Priorität von „Ast Aufsammeln“
Bewertung und Kommentare zur Regel „Die Distanz zu einem essentiellen Gegenstand verringern“:
Bei dieser Regel stellt sich die Frage, wann sie angewandt werden sollte und
44
wann nicht und wie man sicherstellt, dass es überhaupt möglich ist, den essentiellen Gegenstand einzusammeln.
Die Umsetzung führte in der Praxis oft zu Endlosschleifen und war somit
nicht wirklich brauchbar. Wenn diese Probleme behoben wären, wäre es jedoch eine große Bereicherung für den Regelsatz.
Abbildung 24: Abgebildet ist ein unabwendbarer Sprung ins Feuer. Wenn
man links von einem blockierenden oder schadenden Objekt springt und dann
oben auch ein schadendes Objekt ist, kann man sich nicht, ohne Schaden zu
nehmen, in den Fliegen/Gleiten Modus drehen, da das Objekt rechts im Weg
ist.
Name: Etwas wegbewegen für Drehung
Precondition: Der Spieler befindet sich zu nah an einem Objekt, so dass er
sich nicht drehen kann
Action: Sich von dem Objekt wegbewegen
Priority: Wenig
Bewertung und Kommentare zur Regel „Etwas wegbewegen für
Drehung“:
Diese Regel basiert auf der Idee, dass man sich nicht drehen kann, um zu
Fliegen, wenn man sich zu nahe an einem anderen Objekt befindet. Somit
hätte man zum Beispiel das Problem, das in Abbildung 24 dargestellt ist. In
diesem Fall sollte diese Regel eintreten und dem Agenten somit helfen, nicht
unnötig in ein schadendes Objekt zu springen. Die Umsetzung hatte jedoch
Macken, so dass die Position des Spielers oft unnötig verschlechtert wurde.
Beim Testen hat sich herausgestellt, dass ohne die Regel ein viel besseres
Ergebnis erzielt wurde. Da es sich um einen Sonderfall handelt und es auch
nicht richtig funktioniert hat, ist diese Regel in dieser Kategorie gelandet.
45
Name: Auf den höchsten Punkt des Objektes springen
Precondition: Der Spieler ist nicht am höchsten Ort des Objektes, auf dem
er steht, oder kann ohne größere Probleme noch weiter nach oben kommen.
Action: Nach oben gehen.
Priority: Hohe Priorität, da der erreichte Punkt oft einen besseren Ausgangspunkt darstellt.
Name: Auf ein höheres Objekt springen
Precondition: Der Spieler würde eine höhere und somit bessere Position
haben, wenn er auf das Objekt springt. Es gibt einen Weg, um dorthin zu
kommen.
Action: Den Weg ausführen.
Priority: Die Priorität ist von der Bewertung der Positionsverbesserung abhängig.
Bewertung und Kommentare zu den Regeln „Auf ein höheres Objekt springen“ und „Auf den höchsten Ort des Objektes springen“:
Diese Regeln hatten das Problem, dass sie oft dazu geführt haben, dass der
Spieler immer wieder in dieselbe Sackgasse gesprungen ist und somit nicht
weiterkam. Man bräuchte eine weit vorausplanende Erkennung von Sackgassen. Dies effizient einzubauen, ist aber gar nicht so einfach. Es ist sicher eine
gute Idee, aber die Umsetzung zeigte in der Praxis keine guten Ergebnisse.
3.6.3
Allgemeine Anmerkungen zu den Regeln
Es folgen Anmerkungen, die man für das Erstellen der Regeln und eines
Regelsystems bedenken sollte.
3.6.3.1 Das Durchziehen mancher Regeln
Manche Regeln erfordern es, nur in Außnahmefällen, durch andere Regeln
unterbrochen werden zu können. Es ist zum Beispiel oft nicht sinnvoll das
„Sich fallen lassen (um auf einem Objekt zu landen)“ zu unterbrechen. Denn
bevor man landet, doch noch nach rechts zu fliegen, resultiert mit dem Fallen
in eine Grube. Auch die Ausführung eines gefundenen Weges sollte nicht
ständig unterbrochen werden.
3.6.3.2 Das Suspendieren oder Ausschalten mancher Regeln
Manche Regeln verbrauchen viel Zeit und Speicher zur Berechnung, ob die
Preconditions erfüllt sind. Hier geht es vor allem um die Berechnung, ob ein
Weg möglich ist. Eine gute Lösung hierfür wäre das temporäre Ausschalten
46
einer Regel oder eines Objektes für das Pathfinding. Dies sollte für eine zufällige Zeit zwischen bestimmten Grenzen erfolgen, die sich daran orientieren,
wie lange man auf die Regel oder das Objekt verzichten könnte, beziehungsweise wie wichtig das Objekt oder die Regel ist. So kann man einen unnötigen
aufzusammelnden Gegenstand, der tausendfach in einem Level vorkommt, getrost länger suspendieren, als bei einem essentiellen Gegenstand. Auch wichtig ist, wie sicher die Position des Spielers ist. Befindet er sich zum Beispiel
direkt über einem Abgrund, sollte die Entscheidung schnell getroffen werden
und nicht erst alle Möglichkeiten durchgegangen werden. Es ist also in bestimmten Situationen auch sinnvoll, manche Regeln komplett auszuschalten.
3.6.3.3 Limit setzen
Die Berechnung, ob die Regel anwendbar ist, sollte bestimmte Limits nicht
überschreiten. So sollte nicht der komplette Speicher aufgebraucht werden
und es sollte auch nicht zu lange dauern. Wenn der Speicher also überlastet ist
oder zu viel Zeit gebraucht wurde, bei der Berechnung, ob eine Precondition
erfüllt ist, ist es oft ratsam, einfach abzubrechen und ein Ersatzergebnis zu
liefern.
3.6.3.4 Miteinbeziehen neuentdeckter Objekte
Es kann die Situation auftreten, dass ein Weg ausgeführt wird und dabei
ein neues Objekt entdeckt wird. Hierbei kann es manchmal sinnvoll sein, den
Weg neu zu berechnen, wenn das neu entdeckte Objekt den Weg beeinflussen
könnte.
3.7
Action Performer
Der Action Performer empfängt, welche Aktion ausgeführt werden soll und
versucht, diese auszuführen. Wenn es ein Weg ist, erstellt er einen „PerformWay-Thread“ und übergibt den Weg. Wenn es eine einfache Aktion wie „Nach
rechts bewegen“ oder „Springen“ ist, sendet er einfach ein dementsprechendes
Event an den KeyListener. Dann ist es so, als würde der Spieler die Taste
drücken.
3.8
Perform-Way-Thread
Der „Perform-Way-Thread“ erhält einen Weg und einen Spieler und schaltet
den Arbiter bei Initialisierung aus. Außerdem probiert er bis zum Erreichen
des Ziels des Weges, den Abstand zwischen momentaner Lage und Ziel des
Schrittes zu minimieren, indem er dementsprechende Keyboard Events an
47
den KeyListener schickt. Die Wegabschnitte sollten übrigens einen Vorschlag
enthalten, welche Aktion denn zum Ziel führen soll. Doch manchmal kommt
es vor, dass der Charakter vom Weg abkommt. Dann versucht der „PerformWay-Thread“ den Weg wieder zu erreichen. Falls dies nicht möglich ist, ist der
Weg fehlgeschlagen. Daraufhin wird der Arbiter informiert und kann weiter
arbeiten.
4
4.1
Evaluation
Bewertung der praktischen Umsetzung
Die praktische Umsetzungen ist insgesamt zufriedenstellend. Zwar wurde
nicht jede Idee perfekt umgesetzt, die zwischendrin aufkam, aber insgesamt
kann sich das Ergebnis dennoch sehen lassen. Schon nach wenigen Tagen gab
es eine Version der Künstlichen Intelligenz, die sich für eine ziemlich lange
Zeit nicht schlagen ließ. Sie schöpfte die Möglichkeiten, die man ohne das
Planen hat, ziemlich aus. Erst nach Monaten ist es gelungen, eine Künstliche
Intelligenz zu erstellen, die immer bessere Ergebnisse erzielt, als diese.
Das regelbasierte System mit „Dynamic Rule Arbitration“ erwies sich als
sehr hilfreich. Auch wenn es den Nachteil hat, dass nicht mehrere Regeln
gleichzeitig ausführbar sind. Diesen Nachteil kann man aber auch umgehen
und somit hat man ein viel übersichtlicheres und mächtigeres Werkzeug, als
man hätte, wenn man nur „if-then-else“-Verschachtelungen benutzen würde.
Diese würden zwar theoretisch auch alle Möglichkeiten bieten, die man mit
dem Regelsystem hat, aber die Übersichtlichkeit würde dabei in größeren
Projekten auf jeden Fall verloren gehen. Aber es ist trotzdem zu sagen, dass
„if-then-else“-Verschachtelungen viel schneller zu annehmbaren Ergebnissen
führen, als das Regelsystem. Erst nach viel Zeit und Arbeit macht sich der
Vorteil der Übersichtlichkeit bemerkbar.
Das Pathfinding und die Ausführung des Weges funktioniert in den meisten
Fällen ohne Probleme und selbst, wenn es nicht funktioniert, entsteht kein
größeres Problem, da die Ausführung des Weges dann abgebrochen wird. Das
„Suspendieren oder Ausschalten mancher Regeln“, sowie das „Limit Setzen“
hilft der Performance extrem. Auch das „Miteinbeziehen neuentdeckter Objekte“ führt zu guten Ergebnissen.
48
4.2
4.2.1
Anwendbarkeit der beschriebenen Elemente
Regelbasiertes System
Das beschriebene regelbasierte System ist eine übersichtliche Möglichkeit, die
Besonderheiten der Künstlichen Intelligenz zu verwalten. Es braucht zwar eine gewisse Zeit, bis das System erstellt wurde, aber dann lohnt es sich, da
man verschiedene Regelsätze gegeneinander Testen kann. In den meisten Fällen, in denen eine Künstliche Intelligenz in einem Computerspiel gebraucht
wird, ist diese Art von Decision Making ein guter Ansatz. Man sollte sich
jedoch klarmachen, dass nur eine Regel gleichzeitig anwendbar ist und es
notwendig ist, Regeln auszuschalten. Das größte Problem ergibt sich aus der
Erstellung der genauen Definition, wann eine Regel nicht anzuwenden ist. Bei
Beachtung dieser Probleme hat man als Basis ein sehr gutes System und falls
man doch mehrere Regeln gleichzeitig benutzen muss, lässt sich das System
auch dementsprechend umbauen.
4.2.2
Dynamic Rule Arbitration
Durch die „Dynamic Rule Arbitration“ kann man Regeln abhängig von Werten priorisieren. In manchen Fällen kommt man auch ohne aus, aber es ist
sicher eine Bereicherung für viele komplexere Szenarien. Auch den Zufall
kann man miteinbeziehen, um die Vorhersehbarkeit des Agenten zu minimieren. Dies ist auch sinnvoll, um zu verhindern, dass der Agent immer wieder
den selben Weg begeht, der nicht zielführend ist. So kann der Agent durch
zufällige Veränderung auch mal einen anderen Weg probieren.
4.2.3
Pathfinding
Das Pathfinding ist für manche Szenarien einfach zu komplex. Es ist immer
auf Genauigkeit, aber auch auf Zeit- und Speicherbedarf, zu achten. Auch ist
es oft schwieriger für den Menschen vorauszusehen, warum der Charakter sich
so verhält, wenn die Künstliche Intelligenz einen „Pathfinding-Algorithmus“
enthält. Außerdem ist das Pathfinding oft sehr fehleranfällig. Des Weiteren
hat sich beim Testen in den zufälligen Levels herausgestellt, dass der Charakter weniger erfolgreich war, sobald das Pathfinding eingebaut wurde. Zudem
hat die Performance darunter gelitten. Insofern hat es sich eigentlich nicht
rentiert, das Pathfinding einzubauen. Das liegt aber vor allem an der Komplexität, die durch das Erstellen völlig zufälliger Levels geschaffen wurde.
Hierbei ist die Rasterung der Pixel extrem problematisch. Das pixelgenaue
Pathfinding wäre allerdings zu teuer. Ein guter Ansatz, um sowohl Zeitbedarf, Speicherbedarf wie auch Genauigkeit dynamisch zu halten, wäre das
49
„Dynamische Pathfinding“, wie in Kapitel 3.2.3 auf Seite 31 beschrieben.
4.3
Typisch auftretende Probleme
Man sollte sich im Klaren sein, dass man viele Probleme nicht so einfach
in den Griff bekommt. Wichtig hierfür ist es, sich bei Bedarf, problemspezifische Informationen anzeigen lassen zu können. Außerdem sollte man die
problematische Situation bewusst herbeiführen, um es zu testen. Meistens
ist es sinnvoll, sich erst Tools zu schreiben, die einem zeigen, was denn das
Problem ist und dann immer weiter leichte Änderungen vorzunehmen, bis
es schließlich funktioniert. Übrigens sollte man auch immer dabei beachten,
nichts anderes zu zerstören. Oft passiert es nämlich, dass wenn man ein Problem behebt, mehrere andere neue Probleme entstehen, da man irgendetwas
anderes mit verändert hat. Typische Fehler, die bei der Erstellung dieser
Künstlichen Intelligenz entstanden sind und wie sie gelöst wurden, werden
im Folgenden etwas näher ausgeführt.
4.3.1
Pathfinding ergibt unmögliche Wege
Das Pathfinding ergibt unmögliche Wege und scheitert bei der Ausführung
oder versucht es unendlich weiter. Das ist sehr frustrierend, doch normalerweise ist dies ein Anzeichen dafür, dass etwas an dem Pathfinding nicht
stimmt. Dies war oft sehr problematisch, da die Rasterung der Pixel die
Genauigkeit reduzierte. Also konnte man sich laut Rasterung zum Beispiel
schon in einem Objekt befinden und somit kann man ja auch weiter in die
Richtung laufen, da keine neue Kante im Weg wäre. Dies ist dann natürlich
nicht möglich und führt dazu, dass der Charakter stetig versucht, gegen eine
Wand zu laufen. Hierbei ist es wichtig, dass man die Wegausführung nach
einer Zeit abbrechen sollte, wenn es nicht erfolgreich ist. Aber besser wäre es
natürlich, wenn das Pathfinding soweit optimiert wird, dass dieser Fall nicht
eintreten kann.
4.3.2
Pathfinding erkennt gute Wege nicht
Folgende Gründe bestehen, warum manche Wege nicht erkannt werden:
• Die Rasterung ist zu ungenau.
50
• Es dauert zu lange.
• Das Pathfinding hat eine Endlosschleife.
• Das Pathfinding kommt einfach gar nicht auf die Idee, diesen Weg zu
probieren bis es abgebrochen wird.
• Der Speicher wird zu schnell gesprengt.
• Der Weg wird fälschlicherweise als „nicht möglich“ erkannt.
• und so weiter
Grundsätzlich kann man meistens tolerieren, wenn ein Weg nicht gefunden
wird, sofern dieser nicht zu essentiell ist. Doch wenn man diesen Fehler beheben will, ist es meistens extrem viel Arbeit, herauszufinden, was denn jetzt
eigentlich schief gelaufen ist, da es sehr viele Möglichkeiten gibt.
4.3.3
Der Agent kommt bei der Ausführung vom Weg ab
Normalerweise sollte es nicht passieren, dass der Agent bei der Ausführung
vom Weg abkommt. Doch manchmal ist der Grund zum Beispiel die Ungenauigkeit durch die Rasterung der Pixel. Vor allem beim Abspringen und bei
der Flugbahn gibt dies manchmal Probleme. Die Lösung für das Problem sah
folgendermaßen aus:
Bei der Ausführung des Weges wurde überprüft, ob man sich auf dem Weg
befindet oder nicht. Wenn nicht, wird versucht, die Distanz zu verringern.
Hierbei gibt es sehr viele Sonderfälle, die dann je nach Spiel anders aussehen
müssen. Oft ist es sinnvoll, einfach dieselbe Aktion wie davor weiterzuführen,
aber manchmal muss man auch zurück auf den Weg kommen. Und wieder in
anderen Fällen ist es sinnvoll, das Pathfinding abzubrechen. Am besten wäre
allerdings, wenn dies schon im Voraus nicht passieren kann, also wenn zum
Beispiel der Weg genauer berechnet wird.
4.3.4
Pathfinding dauert zu lange
Wenn das Pathfinding zu lange dauert, sollte man oft abbrechen und ein
weiteres Pathfinding zu diesem Objekt für eine Zeit abschalten, weil die Performance ansonsten einfach zu sehr belastet wird. Eine weitere Möglichkeit
51
wäre es auch, stattdessen einen schnelleren Algorithmus zu benutzen, wie
den A* Algorithmus, oder die Kombination von A* Algorithmus und Tiefensuche, wie in Kapitel 3.3.2 auf Seite 33 beschrieben.
Auch das Anwenden des dynamischen Pathfindings (siehe Kapitel 3.2.3 auf
Seite 31) kann hier helfen.
Eine weitere Optimierungsmöglichkeit ist das richtige Lenken des Pathfindings, sowie das Einbeziehen typischer Bewegungsmuster. Es ist zum Beispiel
oft wahrscheinlich, dass man sich weiter in dieselbe Richtung bewegen sollte.
Auch ein Sprung sollte oft zu Ende ausgeführt werden, wenn kein Objekt im
Weg ist und so weiter.
4.3.5
Pathfinding sprengt den Speicher
Der Speicher wird vor allem beim A* Algorithmus manchmal gesprengt. Eine
Möglichkeit, das Problem zu lösen, wäre das Pathfinding einfach abzubrechen.
Eine weitere Möglichkeit wäre es auch, wenn der Speicher gesprengt wird,
also try{ } catch(StackOverFlowError e){ }, stattdessen einen speichereffizienteren Algorithmus zu benutzen, wie den Tiefensuchalgorithmus oder eine
Heuristik. Alternativ könnte man auch die Kombination von A* Algorithmus
und Tiefensuche benutzen, wie in Kapitel 3.3.2 auf Seite 33 beschrieben. Noch
eine Möglichkeit wäre es, die Heuristik stärker zu gewichten, als den bisherigen Weg, wie bei dem dynamischen Pathfinding (siehe Kapitel 3.2.3 auf Seite
31) beschrieben.
4.3.6
Das Ausführen einer Regel schlägt fehl
Dies tritt meistens in Verbindung mit Pathfinding auf, wie in Kapitel 4.3.1
auf Seite 50 beschrieben. In seltenen Fällen ist etwas anderes der Grund. Das
lässt sich aber dann meistens einfach beheben, da man relativ genau erkennt,
warum jetzt nicht die Aktion ausgeführt wurde. Oft handelt es sich dann um
Verwechselungen oder kopierte Passagen, die noch nicht verändert wurden.
4.3.7
Endlosschleifen
Meistens ist der Grund hierfür, entweder das Pathfinding, wie in Kapitel
52
4.3.1 auf Seite 50 beschrieben, oder dass etwas kopiert und noch nicht verändert wurde. Ein weiterer Grund ist oft das Verwechseln zweier Zähler in
geschachtelten „for-Schleifen“, wie zum Beispiel:
for ( int i =0; i < list . size (); i ++){
for ( int j =0; j < list . size (); i ++){
}
}
Hierbei muss bei der zweiten „for-Schleife“ einfach das i durch ein j ersetzt
werden und schon hat man das Ergebnis. Ähnliche Fehler treten sehr häufig
auf und die Behebung ist oft extrem schwierig, da man die genaue Stelle
finden muss. Aber wenn man nochmal jeden Zähler in dem entsprechenden
Teilbereich, der wohl verantwortlich ist, überprüft, sollte man das Problem
schnell in den Griff bekommen. Vor allem die Frage, ob er auch wirklich das
Abbruchkriterium erreichen kann, beziehungsweise ob auch der richtige Zähler hochgezählt wird, sollte überprüft werden.
4.3.8
Regeln behindern sich gegenseitig
Meistens ist das Durchziehen der Regel, wie in Kapitel 3.6.3.1 auf Seite 46
beschrieben, eine gute Regel für dieses Problem. Aber manchmal ist es sinnvoll, die Spring-Regel für den Fall, dass man steckengeblieben ist, zufällig zu
aktivieren oder zu deaktivieren, so dass man auf Dauer alle Möglichkeiten
durchprobieren kann. Wenn es zum Beispiel darum geht, dass der Charakter
stecken geblieben ist und er nur herauskommt, wenn er nach links läuft und
nicht springt beziehungsweise doch springt.
Auch andere Regeln sollten zufällig an- und ausgeschaltet werden, so dass
jede Kombination von an- und ausgeschalteten Regeln theoretisch erreicht
werden kann, um aus jeder Situation herauszukommen.
Eine ähnliche Möglichkeit wäre die Nutzung des Modulos auf Primzahlen. So
kann man zum Beispiel eine Regel ausschalten, wenn der Rest der Teilung
durch 3 eine 0 ergibt. Eine andere Regel wird ausgeschalten, wenn die Teilung durch 7 eine 3 ergibt. Man sollte sich aufschreiben, welche Primzahlen
man nun schon verwendet hat. Damit ist garantiert, dass jede Kombination
auch wirklich erreicht wird.
53
4.3.9
Der Charakter läuft durch Objekte/Kollisionsprobleme
Sobald sich ein Charakter schon in einem Objekt befindet, in das er eigentlich nicht kommen kann, ist es normalerweise nicht sinnvoll, ihm die Möglichkeit zu nehmen, sich herauszumanövrieren, da er sonst nicht weiterspielen kann. Deshalb sollte man ihm die Möglichkeit geben, herauszukommen,
auch wenn er davon einen unfairen Vorteil hat. Trotzdem sollte man versuchen, dass das nicht zu oft vorkommt. Dies passiert zum Beispiel, wenn
sich die Kollisionsgröße des Charakters verändert, wie es beim Wechseln in
den Gleiten/Fliegen-modus der Fall ist, bei dem sich die Kollision um 90◦
dreht. Aber auch wenn das Level zufällig erstellt wird, kann der Charakter direkt innerhalb eines Blockes starten. Außerdem wenn er zum Beispiel
stirbt und dann an einem anderen Ort wiederbelebt wird, kann er auch in
einem anderen Objekt starten. Wenn dies alles nicht der Fall ist, ist wohl die
Kollisionsabfrage fehlerhaft. Manchmal hilft es, zum Beispiel bei Kollision
zwischen A und B, auch die Kollision zwischen B und A abzufragen oder die
Kollisionsabfrage etwas zu erweitern.
4.3.10
Der Charakter „betrügt“
Wenn sich der Charakter durch feste Objekte durchbewegt, liegt das meistens an der Kollisionsabfrage, wie in Kapitel 4.3.9 auf Seite 54 beschrieben.
Ansonsten sollte das eigentlich nicht der Fall sein. In anderen Fällen muss
man den Betrug analysieren und überlegen, wie man das Problem lösen kann.
Meistens liegt es aber an dem Spiel selbst und nicht an der Künstliche Intelligenz. Eine weitere Möglichkeit ist, dass die Künstliche Intelligenz einfach zu
schnell Befehle sendet und das Spiel darauf nicht ausgelegt ist und man somit
zum Beispiel das Fallen umgehen kann. Dies liegt aber wiederum eigentlich
am Spiel selbst.
4.3.11
Der Charakter sitzt fest
Nun stellt sich allerdings die Frage, was zu tun ist, wenn der Charakter
festsitzt. Hierfür gibt es mehrere Ansätze, die zusammen schon die meisten
Probleme lösen können:
• Das „Nach Links laufen“, wie in Kapitel 3.6.1.2 auf Seite 41 beschrieben
54
• die „Finde Einen Neuen Weg“-Regel, wie auf Seite 41 beschrieben
• die „Leerlaufregel“, wie auf Seite 41 beschrieben
• die „Aus einem Käfig Befreien“-Regel, wie auf Seite 42 beschrieben
4.3.12
Ist ein Objekt im Weg / Erreichbarkeit von Objekten
Hier geht es um das Pathfinding durch die optimale Springfunktion, wie in
Kapitel 3.2.1.2 auf Seite 29 beschrieben. Dieses ist auch vollkommen ausreichend, sogar wenn ein Objekt im Weg ist. Aber falls dann wieder ein Objekt
im Weg ist, auf dem neuen Weg, der berechnet wurde, um dem ersten Objekt
auszuweichen, gibt es sehr viele Möglichkeiten zu handeln. Diese lassen sich
nur sehr schwer alle vollkommen durchspielen, da dies immer wieder vorkommen kann.
In solchen Fällen wäre es sinnvoller, mit dem Pathfinding mit gerasterten
Pixeln (Kapitel 3.2.2 auf Seite 30) oder mit dem dynamischen Pathfinding
(Kapitel 3.2.3 auf Seite 31) weiterzuarbeiten.
4.3.13
Der Charakter könnte besser handeln
Dies ist normalerweise ein gutes Indiz dafür, dass eine neue Regel hinzugefügt
werden sollte. Man sollte sich folgende Fragen beantworten:
• Was soll getan werden?
• Warum würde man das so tun?
• Auf was basieren diese Entscheidungen?
• Wann würde man es tun?
• Wann würde man es nicht tun?
• Wie wichtig ist es, genau so vorzugehen?
• Wie könnte die Künstliche Intelligenz eine solche Situation erkennen?
• Wie erkennt die Künstliche Intelligenz, dass die Regel nicht angewandt
werden sollte?
55
Wenn man sich diese Fragen stellt und die Antworten zu einer oder mehreren Regeln umformuliert, sollte man testen, ob die Künstliche Intelligenz nun
in diesen Situationen richtig reagiert und auch nicht in anderen Situationen
plötzlich Fehler macht. Das Zweite ist oft das größere Problem.
4.3.14
Das Hinzufügen der Regel ergibt schlechtere Ergebnisse
Das hat meistens den Grund, dass die Regel zu oft angewandt wird, beziehungsweise in bestimmten Situationen nicht angewandt werden sollte. Dieses
Problem kann man eventuell mit dem Suspendieren/Ausschalten, wie in Kapitel 3.6.3.2 auf Seite 46 beschrieben, oder mit dem Limit setzen, wie in
Kapitel 3.6.3.3 auf Seite 47 beschrieben, in den Griff bekommen.
5
5.1
Resumé
Erreicht
Es wurden viele verschiedene Ansätze beschrieben, um eine Künstliche Intelligenz in einem Jump N Run Computerspiel zu erstellen. Sowohl das Treffen
von Entscheidungen, wie das Finden von Wegen in zufälligen Levels, wurde
ausführlich erklärt.
Es wird garantiert, dass der autonome Agent einen Spieler simuliert, ohne
irgendwelche unfairen Vorteile zu bekommen. Nur bisher gesehene Objekte werden in Betracht gezogen. Damit der Agent Aktionen ausführen kann,
werden wie bei einem Spieler Tastatur und Maus durch Events simuliert. Die
Graphen zur Wegfindung werden automatisch erstellt.
Es gibt kaum andere Literatur in diese Richtung und wenn, dann bezieht
sie sich oft nur auf das Erstellen von Gegnern, auf andere Genres oder Ähnlichem. Den größten Bezug zu dieser Arbeit hatten lediglich Wettbewerbe,
bei denen es darum ging, eine Künstliche Intelligenz für ein Jump N Run
Computerspiel zu schreiben ([10], [11]).
5.2
Ausblick
Die Perfektionierung des Pathfindings, sowie die Erweiterung oder Veränderung der Regelsätze, wären Herausforderungen, denen man sich noch stellen
kann. Eine weitere Herausforderung wäre wohl das Anpassen und Einbauen
56
dieser Künstlichen Intelligenz in ein Spiel, beziehungsweise die Erweiterung
dieses Spiels, so dass es Spaß macht und eventuell sogar kommerziell erfolgreich wird.
Hierfür darf die Performance einerseits nicht merkbar durch die Künstliche
Intelligenz verändert werden. Andererseits jedoch soll sie auch für den Spieler in irgendeiner Weise das Spiel verbessern. Auch die Herausforderung der
Entscheidung, was der Spieler dann für eine Rolle übernehmen soll, wenn die
eigentlich gedachte typische Jump N Run Rolle schon übernommen ist, ist
eine weitere Aufgabe.
Man könnte einerseits dem Spieler dieselbe Rolle geben, aber andererseits
könnte man ihm auch eine völlig neue Rolle zukommen lassen. Es ist eine
echte Herausforderung, hierfür ein gutes Konzept zu entwickeln. Aber auf
jeden Fall wäre das ein erfrischender neuer Wind in der Spielebranche und
könnte zu einem echten Erfolg werden.
Literatur
[1] Funge, J. (2004): Artificial Intelligence For Computer Games. Wellesley,
Massachusetts: A K Peters, Ltd.
[2] Millington, I. & Funge, J. (2009): Artificial Intelligence For Games (2nd
ed.). Burlington: Morgan Kaufmann Publishers, Elsevier Inc.
[3] Saltzman, Marc (1999): Game Design Die Geheimnisse der Profis. München: X-Games, Markt & Technik Verlag.
[4] http://www.flugsimulator.de/aerosoft62/ibizax_6.jpg,
aufgerufen am 09.09.2012.
zuletzt
[5] http://zfs-forschung.de/pageID_2964358.html, zuletzt aufgerufen
am 09.09.2012.
[6] http://pille.iwr.uni-heidelberg.de/~bogynastja/dijkstra2.
gif, zuletzt aufgerufen am 09.09.2012.
[7] http://de.wikipedia.org/wiki/Artillery_%28Computerspiel%29,
zuletzt aufgerufen am 09.09.2012.
[8] http://www.ai-blog.net/archives/000152.html, zuletzt aufgerufen
am 12.09.2012.
[9] http://en.wikipedia.org/wiki/Strong_ai, zuletzt aufgerufen am
10.09.2012.
57
[10] http://julian.togelius.com/mariocompetition2009/, zuletzt aufgerufen am 13.09.2012.
[11] http://apo-games.de/apoMario/, zuletzt aufgerufen am 13.09.2012.
[12] http://www.forbes.com/sites/alexknapp/2012/03/20/
ray-kurzweils-predictions-for-2009-were-mostly-inaccurate/,
zuletzt aufgerufen am 10.09.2012.
58
Ich erkläre hiermit gemäß § 17 Abs. 2 APO, dass ich die vorstehende Bachelorarbeit selbstständig verfasst und keine anderen als die angegebenen
Quellen und Hilfsmittel benutzt habe.
...........................................
Datum
...........................................................................
Unterschrift
59