Drehbewegung
Werbung

Kapitel 10
Drehbewegung
10.1 Der Drehimpuls
Bei der Behandlung der Bewegung eines Teilchens haben wir den
Impuls eines Teilchens definiert (Siehe Kap. 2.2). Diese Grösse war
sehr hilfreich, wegen der Erhaltung des Gesamtimpulses (Siehe
Kap. 2.3).
Der Erhaltungssatz kann im Fall einer Drehbewegung (oder Rotation)
umformuliert werden. Man spricht von der Erhaltung des gesamten
Drehimpulses.
10.1.1 Definition des Drehimpulses
Der Drehimpuls bezüglich einem bestimmten Punkt O wird durch
das Vektorprodukt des Ortsvektors r und des (linearen) Impulses p,
d.h.
r r r
r r
L ≡ r × p ≡ m( r × v )
Physik
441
Drehbewegung
definiert, wobei m die Masse des Teilchens ist, und
r
r = Ortsvektor bezüglich O
r
r
p = mv = Implusvektor
Siehe Abb. 1.
L
Bahn
O (Ursprung)
r
θ
p
Ebene
der Bewegung
Definition des Drehimpulses. Der Drehimpulsvektor ist senkrecht
zur Ebene, die durch den Ortsvektor und den Impulsvektor definiert ist.
Figur 1.
Der Drehimpuls ist ein Vektor, dessen Richtung durch die RechteHand-Regel für ein Vektorprodukt eindeutig bestimmt ist.
Siehe Abb. 2.
442
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Drehimpuls
r
r
p
p
p
p
r
Figur 2.
r
Die Rechte-Hand-Regel für das Vektorprodukt.
Der Drehimpuls ist senkrecht zur Ebene, die durch den Ortsvektor
und den Impuls definiert ist. Er ist senkrecht zur Bewegungsrichtung
der Masse.
Der Betrag des Drehimpulses ist gleich
r r r
L = r p sin θ
wobei θ der von r und p eingeschlossene Winkel ist. Der Betrag kann
auch in den folgenden Formen ausgedrückt werden
L = ( r sin θ ) p = r⊥ p
L = r( p sin θ ) = rp⊥
wobei rsinθ die Komponente von r senkrecht zur Wirkungslinie des
Impulses p ist, und psinθ ist die Impulskomponente senkrecht zu r.
Wenn der vom Ortsvektor und dem Impuls eingeschlossene Winkel θ
gleich 0° oder 180° ist, ergibt sich keine zu r senkrechte Impulskom-
Physik
443
Drehbewegung
ponente, und auch keine zur Wirkungslinie des Impulses senkrechte
Komponente von r. Der Drehimpuls verschwindet in diesem Fall.
Einheit: im MKS-System:
kg.m kg.m 2
=
[ L] = m.
s
s
10.1.2 Erhaltung des Drehimpulses
Wir betrachten nun die zeitliche Ableitung des Drehimpulses
r
r
r
r
r r dr r r dp
r
r r dp
dL
= ( r × p) = × p + r × = (v × mv ) + r ×
424
3
dt
dt
dt 1
dt
r r
=0 weil v // v
Es folgt, dass die zeitliche Änderung des Drehimpulses gleich dem
Vektorprodukt des Ortsvektor und der zeitlichen Änderung des
(linearen) Impulses p ist:
r
r
dL r dp
=r×
dt
dt
Aus dem zweiten Newtonschen Gesetz kennen wir die Beziehung
zwischen der Kraft und dem (linearen) Impuls, nämlich
r
r
r
r r
dv
dp d ( mv )
=
={ m
= ma = F
dt
dt
dt
m = Konst .
wobei wir angenommen haben, dass die Masse des Teilchens konstant ist.
Das Drehmoment der Kraft F bezüglich r wird so definiert
r r r
M≡r×F
444
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Drehimpuls
Einheit: im MKSA-System
kgm 2
[ M ] = [r][F ] = Nm = 2
s
Aus der Definition folgt der Drehimpulssatz (für m=Konst.): die
zeitliche Änderung des Drehimpulses eines Teilchens ist gleich dem
angreifenden Drehmoment, d.h.
r
r
dL r dp r r r
=r×
=r×F= M
dt
dt
Beispiel 1: fallende Masse
Wir betrachten eine Masse m, die wegen der Erdbeschleunigung g
senkrecht nach unten fällt. Zur Zeit t=0 wird die Masse aus dem
Ruhezustand (mit einer Anfangsgeschwindigkeit v=0) losgelassen.
Siehe Abb. 3.
Die Masse spürt ein Drehmoment M und besitzt einen Drehimpuls L
um eine Drehachse durch O.
Der Betrag des Drehmomentes ist gleich
M = rF sin θ = ( r sin θ ) F = bmg = Konst.
wobei b der Kraftarm ist (siehe Abb. 3).
Das Drehmoment ist das Produkt aus der Kraft mg und dem Kraftarm
b. Nach der Rechte-Hand-Regel geht das Drehmoment senkrecht in
die Zeichenebene hinein.
Physik
445
Drehbewegung
Der Betrag des Drehimpulses ist gleich
L = rp sin θ = ( r sin θ ) mv ( t) = bmv ( t) = bmgt
wobei v(t)=gt die Geschwindigkeit der Masse als Funktion der Zeit
ist.
Drehmoment
M=r×mg
b
Drehachse
Kraft
F=mg
linearer Impuls
dp
= F = mg
dt
r
F
θ
Drehimpuls
dL
= M = r × mg
dt
Eine Masse m fällt senkrecht nach unten. Ein Drehmoment wirkt
um eine Drehachse durch O. Der Drehmomentvektor geht senkrecht in die
Zeichenebene hinein.
Figur 3.
Drehmoment und Drehimpuls sind hier parallele Vektoren. Die zeitliche Änderung des Drehimpulses wirkt somit nur auf den Betrag und
nicht auf die Richtung.
446
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Drehimpuls
Wir können die folgende Bezeihung in Skalarform überprüfen
?
dL }
= M
dt
⇔
d
(bmgt) = bmg
dt
ok!
Wir setzen in die Gleichung die Geschwindigkeit v für gt ein und
erhalten
d
(bmv ) = bmg ⇒
dt
d
(mv ) = mg ⇒
dt
dp
=F
dt
Wie erwartet, stellt die Beziehung M=dL/dt der Drehbewegung keinen grundsätzlich neuen Satz der Physik dar, sondern ist nur eine
Umformulierung der Newtonschen Gesetze für die Drehbewegung.
Beispiel 2: zentrale Kraft
Die Gravitationskraft ist z.B. eine zentrale Kraft, weil sie die folgende Form besitzt
r
r r
r r
F (r ) = f ( r )
r
d.h., sie wirkt immer längs die Linie zwischen den zwei Körpern.
Wenn wir z.B. die Bewegung eines Planeten um die Sonne betrachten, ist das auf den Planet ausgeübte Drehmoment bezüglich der
Sonne gleich (wir stellen die Sonne in den Ursprung des Koordinatensystems)
r r r r r rr f ( rr ) r r
M = r × F = r × f (r ) =
(r × r ) = 0
r
r
Physik
447
Drehbewegung
Bezüglich O übt die Gravitationskraft kein Drehmoment auf den Planet aus. Es folgt, dass der Drehimpuls des Planeten bezüglich der
Sonne konstant ist
r
r
r
dL
= M = 0 ⇒ L = Konst.
dt
10.2 Die Bewegung starrer Körper
Ein spezieller und wichtiger Fall ist die Bewegung starrer Körper.
Ein starrer Körper wird definiert als ein Körper, bei dem die
Änderung der Abstände zwischen allen seinen Atomen oder
Molekülen bei Anwendung einer Kraft oder eines Drehmoments vernachlässigt wird.
Ein starrer Körper behält seine Gestalt, wenn er sich bewegt.
Wir unterscheiden zwischen zwei Arten von Bewegungen:
1.
2.
Translationsbewegung: alle Teilchen (Atome oder Moleküle) des
Körpers beschreiben parallele Bahnen;
Drehbewegung: alle Teilchen beschreiben kreisförmige Bahnen
um eine Gerade, die man als Drehachse (oder Rotationsachse)
bezeichnet. Die Achse kann fixiert sein oder ihre Richtung während der Bewegung relativ zum Körper verändern.
Die allgemeine Bewegung eines starren Körpers kann immer als
Kombination einer Translations- und einer Rotationsbewegung
betrachtet werden.
448
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.1 Die Winkelgeschwindigkeit
Wir wollen nun einen starren Körper betrachten, der sich um die ∆Achse dreht (Siehe Abb. 4).
Die Rotation des Körpers um die Drehachse kann mit Hilfe eines
Drehwinkels θ beschrieben werden. Die Winkelgeschwindigkeit
wird als die zeitliche Ableitung der Winkelfunktion θ(t) definiert
ω ( t) ≡
dθ ( t )
dt
Siehe Kap. 6.3.1. Die Winkelgeschwindigkeit kann als Vektorgrösse
definiert werden, deren Richtung parallel zur Drehachse und senkrecht zur Ebene der Rotation ist. Die Richtung des Vektors ist durch
die Rechte-Hand-Regel gegeben.
∆
ω
θ(t)
Die Winkelgeschwindigkeit kann als Vektorgrösse definiert werden.
Seine Richtung ist zur Drehachse parallel und durch die Rechte-HandRegel gegeben.
Figur 4.
Physik
449
Drehbewegung
Wenn der starrer Körper sich mit der Winkelgeschwindigkeit ω um
die Drehachse dreht, ist die Geschwindigkeit jedes seiner Teilchen
gleich
r r
r
r r r
v i = ωr∆,i ⇒ v i = ω ri sin γ ⇒ v i = ω × ri
1424
3
1
424
3
Beziehung für die
Vektorgrösse
Beziehung für die
Beträge
wobei r∆,i der Abstand des Teilchens von der Drehache ist.
Siehe Abb. 5.
∆
v i = ω × ri
ω
γ r
i
vi
O (Ursprung)
Beziehung zwischen dem Winkelgeschwindigkeitsvektor und der
(linearen) Geschwindigkeit der Teilchen (Atome oder Moleküle) i des
drehenden Körpers.
Figur 5.
450
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.2 Gesamte Energie eines starren Körpers
Nun werden wir uns mit der Translation und Rotation eines starren
Körpers beschäftigen.
Der Ortsvektor des Teilchens i des starren Körpers wird geschrieben
als
r
r
r
ri =
r{
+
ri,SP
SP
{
Ortsvektor
des Schwerpunkts
Ortsvektor des Teilchens i
bezüglich des Schwerpunkts
Siehe Abb. 6.
mi
ri,SP
SP
ri
r SP
Der Ortsvektor des Teilchens i wird bezüglich des Ortsvektors des
Schwerpunkts geschrieben.
Figur 6.
Wenn ein starrer Körper sich bewegt, kann seine Bewegung aufgeteilt werden in eine Translation des Schwerpunkts und eine Rotation um den Schwerpunkt. Siehe Abb. 7.
Physik
451
Drehbewegung
Rotation um
den Schwerpunkt
mi
ri,SP
SP
SP
SP
Bahnkurve
des Schwerpunkts
Die Bewegung des starren Körpers wird in eine Translation des
Schwerpunkts und eine Rotation um den Schwerpunkt aufgeteilt.
Figur 7.
In Kap. 7.1.7 haben wir gesehen, dass die gesamte kinetische Energie
eines Teilchensystems die Summe von zwei Termen ist: die kinetische
Energie des Schwerpunkts und die kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt.
r
r 2
1
mi (v SP + v i,SP )
∑
2 i =1,N
i =1, N
r 2
r 2
1
1
mi (v i,SP )
= M (v SP ) +
∑
2 4243
2 =1,N
1
1i 4
42443
kinetische Energie
E kin =
1
r
∑ 2mv
2
i i
des Schwerpunkts
=
kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt
wobei die Geschwindigkeit eines Teilchens als die Summe der
Schwerpunktsgeschwindigkeit und der Geschwindigkeit des Teilchens relativ zum Schwerpunkt ausgedrückt wird
r r
r
v i = v SP + v i,SP
{
bezüglich SP
452
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Nun werden wir die Rotation um die Drehachse betrachten. Die
Drehachse geht durch den Schwerpunkt des starren Körpers.
Weil
r r r
v i = ω × ri
r r
r
⇒ v i = ω ri sin γ = ωr∆,i
wobei r∆,i der Abstand des Teilchens von der Drehache ist, folgt, dass
die kinetische Energie bezüglich des Schwerpunkts (d.h. die Rotationsenergie) gleich
Rot
E kin
=
≡
r
r
∑ 2 m (ω × r )
1
i
i =1, N
i
2
=
1
∑ 2 m (ωr )
i =1, N
∆, i
i
2
1
= ∑ mi r∆,i 2 ω 2
2 i =1,N
1
I ω2
2 ∆
ist. Dabei haben wir das Trägheitsmoment des Körpers I relativ
zur Rotationsachse ∆ definiert
I∆ ≡
Einheit: im MKS-System
∑mr
i =1, N
2
i ∆, i
kg m2
Für die gesamte kinetische Energie des starren Körpers gilt
r 2 1
r 2
1
M (v SP ) + ∑ mi (v i,SP )
2
2 i =1,N
r 2
1
1
I ∆,SPω 2
= M (v SP ) +
2
2
14243
1
424
3
E kin =
kinetische Energie
des Schwerpunkts
Physik
Energie der Rotation
um den Schwerpunkt
453
Drehbewegung
Die Gesamtenergie ist die Summe der kinetischen und potentiellen
Energien (Siehe Kap. 7.1.8)
E = E kin + E pot
=
r 2
1
1
M (v SP ) +
I ∆,SPω 2
2
2
14243
1
424
3
kinetische Energie
des Schwerpunkts
Energie der Rotation
um den Schwerpunkt
+
E pot ,externe
14
24
3
+ E pot, interne
Potentielle Energie
wie wenn die Gesamtmasse
im SP konzentriert wäre
Die externe potentielle Energie ist die gleiche, wie wenn die Gesamtmasse im Schwerpunkt konzentriert wäre.
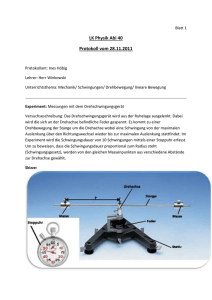
Experiment:Verschiedene Gewichte auf Rotator
Wir betrachten einen Rotator mit zwei gleichen Massen m. Wir können den Abstand r zwischen den Massen und der Drehachse ändern.
Ein Ende einer masselossen Schnur wird um die Achse des Rotators
aufgewickelt, und am anderen Ende der Schnur wird eine Masse M
angehängt.
Die gesamte Energie des Systems ist gleich
E=
1
Mv 2 + Mgh +
2
14
4244
3
Energie der Masse M
1
I ∆ω 2
2
123
Rotationsenergie der Massen m
wobei ω die Winkelgeschwindigkeit des Rotators (d.h. die Winkelgeschwindigkeit der Massen m um die Rotatorachse) ist, und v und h
sind die Geschwindigkeit und die Höhe der aufgehängten Masse.
Wenn die Masse M losgelassen wird (Anfangsbedingung: v=0, d.h.
ω=0), wird ihre potentielle Energie Mgh in kinetische Energie der
Masse M und die Rotationsenergie des Rotators umgewandelt.
454
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Das Trägheitsmoment des Rotators (d.h. der beiden Massen m) ist
gleich
I∆ ≡
∑mr
i =1, N
i ∆, i
2
= mr 2 + mr 2 = 2 mr 2
Es nimmt mit dem Quadrat des Abstandes r zu.
Wenn sich beide Masse mit einer bestimmten Winkelgeschwindigkeit
ω um die Rotatorachse drehen, dann ist umso mehr Rotationsenergie
im Rotator gespeichert, je grösser der Abstand r von der Achse ist.
Es folgt, dass weniger Energie für die Translationsbewegung der
Masse M vorhanden ist. Die Masse M wird desto langsamer fallen, je
grösser der Abstand r zwischen beiden Massen und der Rotatorsachse
ist.
10.2.3 Berechnung des Trägheitsmoments
Ein starrer Körper besteht aus einer sehr grossen Zahl dicht gepackter
Teilchen.
Für eine solche kontinuierliche Massenverteilung wird das Trägheitsmoment mit einem Integral gewonnen
I ∆ = ∫ r 2 dm
wobei r der Abstand des Massenelements dm von der Drehachse ist.
Das Trägheitsmoment eines homogenen Ringes. Wir
betrachten
die Drehbeweung eines homogenen Ringes um eine Achse, die durch
seinen Mittelpunkt geht und senkrecht zur Ringebene liegt.
Physik
455
Drehbewegung
Beim Ring mit Radius R befindet sich die gesamte Masse beim konstanten Abstand R. Das Integral ist dann
I ∆ ( Ring) = ∫ r 2 dm = R 2 ∫ dm = MR 2
wobei M die gesamte Masse des Ringes ist.
Das Trägheitsmoment eines homogenen Zylinders. Wir betrachten das Trägheitsmoment eines homogenen Zylinders mit Gesamtmasse M und Radius r bezüglich der Zylinderachse.
Wir unterteilen den Zylinder in eine Serie von konzentrischen Ringen
mit Radius r und Dicke dr. Siehe Abb. 8.
dr
r
R
Figur 8.
Berechnung des Trägheitsmoments eines Zylinders.
Das Trägheitsmoment dI des Ringes mit Radius r ist gleich
dI = r 2 dm = r 2 M
456
2πrdr 2 Mr 3 dr
=
R2
πR 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Das Trägheitsmoment des Zylinders ist die Summe der Trägheitsmomente der einzelnen Ringe mit Radius r:
r 3 dr
=
r=0
r=0 R2
2 M r=R 3
2 M R4 1
= 2 ∫ r dr = 2
= MR 2
r
=
0
R 4 2
R
I ∆ ( Zylinder) = ∫
r=R
dI = 2 M ∫
r=R
Das Trägheitsmoment des Zylinders mit einem Radius r ist kleiner als
das eines Ringes mit demselben Radius, weil im Fall des Zylinders
sich auch Teilchen bei Radien r<R befinden, und diese Teilchen tragen weniger zur Rotationsenergie bei, als wenn sie sich beim Radius
r=R befinden würden.
Experiment: Schiefe Ebene.
Verschiedene Zylinder der gleichen Masse M, aber mit verschiedenen
radialen Massenverteilungen (d.h. verschiedenen Trägheitsmomenten) werden auf einer schiefen Ebene losgelassen. Siehe Abb. 9.
SP
x(t)
vSP(t)
H
h(t)
α
Schiefe Ebene. Die vom Zylinder überstrichene Strecke wird als
x(t) bezeichnet.
Figur 9.
Physik
457
Drehbewegung
Die gesamte Energie eines Zylinders ist gleich
E=
1
1
2
Mv SP
+ I ∆,SPω 2 + Mgh
2
2
wobei vSP die (lineare) Geschwindigkeit seines Schwerpunkts und ω
seine Winkelgeschwindigkeit ist.
Die verschiedenen Zylinder werden von einer Höhe H losgelassen.
Wenn die Zylinder auf der schiefen Ebene rollen, beobachten wir,
dass sie nicht zur selben Zeit den Boden erreichen, d.h. die Zylinder
werden nicht gleich beschleunigt.
Auf der schiefen Ebene wird die potentielle Energie der Zylinder in
kinetische und Rotationsenergie umgewandelt.
Die Beschleunigung hängt vom Trägheitsmoment des Zylinders ab.
Je grösser das Trägheitsmoment des Zylinders ist, desto langsamer
wird er beschleunigt.
10.2.4 Rollende Körper
Wir betrachten die Bewegung eines Körpers, der wie im Fall der obigen schiefen Ebene auf einer Fläche rollt. In diesem Fall kann die
Winkelgeschwindigkeit des Körpers in Beziehung mit der Geschwindigkeit seines Schwerpunkts gesetzt werden.
Rollbedingung: Wenn wir annehmen, dass der Körper sich ohne zu
gleiten bewegt, gilt
v SP = Rω
v SP
ω=
R
458
für einen rollenden Körper (ohne zu gleiten)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Siehe Abb. 10.
ω
R
vSP
Rω
Die Beziehung zwischen der linearen Geschwindigkeit des
Schwerpunkts und der Winkelgeschwindigkeit um den Schwerpunkt, wenn
der Körper sich ohne zu gleiten bewegt.
Figur 10.
Die gesamte kinetische (lineare und Rotations-) Energie ist in diesem
Fall gleich
E kin =
I 2
1
1
1
2
Mv SP
+ I ∆,SPω 2 = M + ∆,SP
v
2
2
2
R 2 SP
Beispiel: Schiefe Ebene
Die gesamte Energie ist gleich
I 2
1
E = E kin + Mgh = M + ∆,SP
v + Mgh
2
R 2 SP
Physik
459
Drehbewegung
Wenn wir diese Gleichung als Funktion der Zeit betrachten, erhalten
wir für eine schiefe Ebene (Siehe Abb. 9)
I 2
1
E = M + ∆,SP
v ( t) + Mg( H − x ( t)sin α ) = Konst.
2
R 2 SP
Wenn die gesamte Energie konstant ist, wird die zeitliche Ableitung
der gesamten Energie verschwinden:
I d 2
d
dE 1
v SP ( t)) − Mg sin α x ( t)
= M + ∆,SP
(
2
dt
dt 2
R dt
I
dv SP
1
= M + ∆,SP
− Mg sin αv SP ( t) = 0
2 2v SP ( t)
dt
R
2
I
⇒ M + ∆,SP
a − Mg sin α = 0
R 2 SP
Es folgt, dass die Beschleunigung des Schwerpunkts des rollenden
Körpers gleich
aSP =
Mg sin α
< g sin α
I ∆,SP
M + 2
R
ist. Wie erwartet nimmt die Beschleunigung des Körpers mit seinem
Trägheitsmoment ab und sie ist kleiner als gsinα.
Der Wert gsinα ist das Ergebnis, wenn wir die Rotationsenergie des
Körpers vernachlässigen.
460
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.5 Drehimpuls eines starren Körpers
Der Drehimpuls eines starren Körpers ist gleich dem Gesamtdrehimpuls der Teilchen des Körpers
r
r
L = ∑ Li
i =1, N
Wir beginnen mit der Rechnung des gesamten Drehimpulses eines
Velorads.
Wir stellen uns vor, dass das Velorad aus einer Ansammlung von Teilchen der Masse m besteht, die mit masselossen Stäben verbunden
sind. Das Velorad wird deshalb als ein homogener Ring betrachtet.
Siehe Abb. 11.
ω
R
Figur 11.
Physik
Das Velorad wird als ein homogener Ring betrachtet.
461
Drehbewegung
Der Drehimpuls der einzelnen Teilchen der Masse m ist gleich
r
Li = mRv i = mR( Rω ) = ( mR 2 )ω
weil jedes Teilchen dieselbe Geschwindigkeit Rω und denselben
Radius R besitzt.
Die Richtung des Drehimpulsvektors wird mit Hilfe der RechteHand-Regel gefunden. Wir bemerken, dass die Drehimpulsvektoren
der Teilchen parallel zueinander sind, weil
r
r r
r r
r
Li = mri × v i = mri × (ω × ri )
Siehe Abb. 12.
∆
L1 L
2 L3
L4
L5
L6
L7
ω
L
Der gesamte Drehimpuls des Velorads (des Ringes) ist zur
Winkelgeschwindigkeit parallel, weil die Drehimpulse der einzelnen
Teilchen parallel zueinander und zur Winkelgeschwindigkeit sind.
Figur 12.
462
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Es folgt, dass der gesamte Drehimpuls einfach gefunden wird. Der
Betrag des gesamten Drehimpulses ist gleich der Summe der Beträge
der Drehimpulse der einzelnen Teilchen und die Richtung ist zur Winkelgeschwindigkeit parallel:
r
r
r
r
r
L = ∑ Li = ∑ ( mR 2 )ω = ( MR 2 )ω = I ∆ω
i =1, N
i =1, N
Wir erkennen einen Teil, der dem Trägheitsmoment des Velorads (des
Ringes) entspricht.
Im Allgemeinen schreiben wir:
r
r r
r
L = I ∆ω
nur wenn L / /ω
wobei L der gesamte Drehimpuls des Körpers bezüglich des Schwerpunkts ist, und ω ist die Winkelgeschwindigkeit um die Drehachse,
die durch den Schwerpunkt geht.
Die Beziehung gilt nur, wenn die Vektoren L und ω parallel zueinander sind.
10.2.6 Hauptachsen eines Körpers
Im Allgemeinen sind für einen Körper von beliebiger Form die Vektoren L und ω nicht parallel zueinander.
Man kann beweisen, dass es für jeden Körper mindestens drei
zueinander senkrechte Richtugen gibt, für die der gesamte
Drehimpuls parallel zur Winkelgeschwindigkeit ist. Diese
Achsen heissen die Hauptträgheitsachsen.
Für die Rotation um eine Hauptachse gilt
r
r
L = I ∆ω
nur für Rotation um Hauptachsen
Physik
463
Drehbewegung
wobei I∆ das Trägheitsmoment bezüglich der Hauptachse, L der
gesamte Drehimpuls des Körpers und ω die Winkelgeschwindigkeit
um die Achse ist.
10.2.7 Dynamik der starren Körper
Die Bewegungsgleichung des Schwerpunkts eines Teilchensystems,
die natürlich auch für einen starren Körper gilt, haben wir schon
erwähnt (Siehe Kap. 7.1.4)
r
r
dv SP r
MaSP = M
= Fext
dt
wobei Fext die resultierende äussere Kraft ist. Die Bewegung des
Schwerpunkts entspricht der Translationsbewegung des starren Körpers.
Für die Drehbewegung des Körpers gilt der sogenannte Drehimpulssatz.
Wir betrachten den gesamten Drehimpuls. Wenn wir den starren Körper als Teilchensystem betrachten, gilt
r
r
r
r r
dL
dLi
= ∑
= ∑ M i = ∑ ri × Fi
dt i =1,N dt i =1,N
i =1, N
wobei Mi das auf das Teilchen i wirkende Drehmoment ist.
Als wir im Kap. 7.1.4 von der Dynamik des Schwerpunkts eines Teilchensystems gesprochen haben, haben wir die resultierende Kraft, die
auf ein Teilchen wirkt, in interne und externe Teile unterteilt:
r
r
r
Fi = Fi,int + Fi,ext
(
464
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
)
Die Bewegung starrer K rper
Es folgt, dass das resultierende Drehmoment, das auf das Teilchen i
wirkt, so geschrieben werden kann
r
r r
r r
r r
r r
∑ ri × Fi = ∑ ri × Fi,int + Fi,ext = ∑ ri ×Fi,int + ∑ ri ×Fi,ext
i =1, N
i =1, N
(
)
i =1, N
i =1, N
Wegen dem Aktion-Reaktion Gesetz (Siehe Kap. 7.1.4) nehmen wir
an, dass die internen Kräfte zwischen Paaren von Teilchen wirken.
Die Drehmomente solcher Paare kompensieren einander.
Siehe Abb. 13.
1
F12 interne
Teilchen i
ri
r1
F21 interne
r
2
r2
Das resultierende Drehmoment. Die durch innere Kräfte
ausgeübten Drehmomente von Paaren kompensieren einander.
Figur 13.
Es folgt der Drehimpulssatz
r
r
r r
dL
= ∑ ri ×Fi,ext = M ext
dt i =1,N
wobei Mext das resultierende Drehmoment ist.
Physik
465
Drehbewegung
Wenn die Drehung um eine Hauptachse stattfindet, kann der Drehimpulssatz so geschrieben werden
r
r
r
r
dω
dL d
= ( I ∆ω ) = I ∆
= M ext
dt
dt dt
Experiment: Garnrolle
Wir betrachten ein Garn, das um die Achse eines Yoyos aufgewickelt
ist. Das Yoyo besteht aus zwei identischen Zylindern und einem
koaxial dazwischen geklebten kleineren Zylinder.
Dass die Drehbewegung mit dem Drehmoment verknüpft ist, kann
man in der folgenden Weise demonstrieren: (Siehe Abb. 14).
1.
2.
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse in die Zeichenebene hinein geht. Das Yoyo dreht sich
nach rechts und das Garn wird um das Yoyo aufgewickelt.
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse aus der Zeichenebene heraus geht. Das Yoyo dreht sich
nach links und das Garn wird sich abrollen.
F
F
F
r
r
r
Drehachse
Drehmoment geht
Drehmoment verschwindet
Drehmoment geht
in Blattebene hinein
Yoyo dreht nicht
aus Blattebene heraus
Yoyo dreht nach rechts
Figur 14.
466
Yoyo dreht nach links
Das Drehmoment ist für die Drehbewegung verantwortlich.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.8 Erhaltung des gesamten Drehimpulses
Wenn der Körper (oder ein System) isoliert ist, oder wenn das resultierende Drehmoment verschwindet, folgt aus dem Drehimpulssatz,
dass der gesamte Drehimpuls des Körpers konstant bleibt.
r
r
M ext = 0 ⇔ L = Konst.
Experiment: Drehimpulssatz mit Velorad
Wir betrachten die Anordnung der Abb. 15 (links). Eine Person hält
ein Velorad.
Am Anfang dreht sich das Velorad um seine Achse “nach rechts”
(Siehe Abb. 15), so dass sein Drehimpuls nach oben zeigt. Der
gesamte Drehimpuls ist gleich
r
r
r
r
Lvor = LPerson + LVelorad = LVelorad
123
=0
Die Person wird jetzt die Achse der Rotation des Velorads so ändern,
dass der Drehimpuls des Velorads nach unten zeigt, d.h. das Velorad
dreht sich “nach links”. Der Drehimpuls des Velorads hat sich so verändert
r
r
LVelorad → − LVelorad
Der gesamte Drehimpuls ist gleich
r
r
r
Lnach = LPerson − LVelorad
Weil der gesamte Drehimpuls erhalten werden muss, folgt
r
r
r
r
r
r
r
Lnach = LPerson − LVelorad = Lvor = LVelorad ⇒ LPerson = 2 LVelorad
Physik
467
Drehbewegung
Die Person wird sich mit dem Drehimpuls 2LVelorad “nach rechts”
drehen.
L
2L
L
Figur 15.
468
Erhaltung des Drehimpulses.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia