2 Geradlinige Bewegung eines Massenpunkts - WWW-Docs for B-TU
Werbung

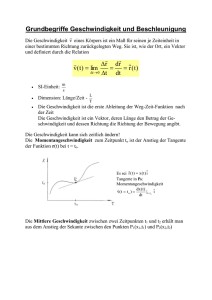
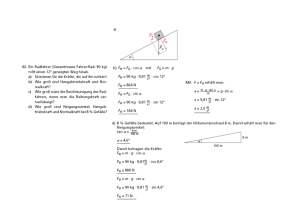
13 2 Geradlinige Bewegung eines Massenpunkts Bei vielen Bewegungsaufgaben kann die Drehbewegung eines Körpers vernachlässigt werden, wenn nur dessen translatorische Bewegung interessiert. In diesem Fall darf der Körper als Massenpunkt betrachtet werden, der sich entlang einer vorgegebenen Linie bewegt. Ist die Linie eine Gerade, spricht man von geradliniger Bewegung. Das im Folgenden entwickelte Vorgehen ist jedoch auf beliebige eindimensionale Translationen sowie reine Drehbewegungen um feststehende Achsen übertragbar. Der Ort eines bewegten Massenpunkts auf einer Linie lässt sich durch eine einzelne Lagekoordinate beschreiben. Deren zeitliche Änderung entspricht seiner Momentangeschwindigkeit, die zeitliche Änderung der Geschwindigkeit seiner Beschleunigung. Für eine geschlossene Beschreibung unstetiger Zeitverläufe kann das aus der Balkenstatik bekannte Föppl-Symbol herangezogen werden. Im Allgemeinen ergibt sich die Beschleunigung eines Massenpunkts mit Hilfe des Newton’schen Axioms aus den auf ihn wirkenden Kräften in Wegrichtung. Bei gesteuerten Bewegungen z.B. von Werkzeugmaschinen oder Fördereinrichtungen kann das Beschleunigungs- oder Geschwindigkeitsprofil jedoch auch als Weg- oder Zeitfunktion vorgegeben sein. Allgemein wird eine Bewegungsaufgabe durch vier Variablen beschrieben: Zeit, Lage, Geschwindigkeit und Beschleunigung. Dabei kann eine der Größen als unabhängige Variable gewählt, eine weitere als Funktion der unabhängigen Variablen vorgeschrieben werden. Die beiden restlichen Größen sind durch die differentiellen Zusammenhänge zwischen Lage und Geschwindigkeit einerseits sowie Geschwindigkeit und Beschleunigung andererseits eindeutig festgelegt, und können daraus berechnet werden. 14 2 Geradlinige Bewegung eines Massenpunkts 2.1 Kinematische Größen ÌÌ Definitionen 0 s Lage: v(t), a(t) s(t) Ì ÌÌ s Weg−Zeit−Diagramm s + s(t) t Ableitung Integration Steigung v Fläche Geschwindigkeits−Zeit−Diagramm Geschwindigkeit: v + lim Ds + ds + s dt Dt³0 Dt . t Ableitung Integration Steigung a Fläche Beschleunigungs−Zeit−Diagramm Beschleunigung: a + lim Dv + dv + v + s dt Dt³0 Dt . .. t 2 Geradlinige Bewegung eines Massenpunkts 15 Beziehungen zwischen den Diagrammen v(t) + ds , dt a(t) + dv dt a(t) >0 0 <0 v(t) steigend konstant fallend <0 s(t) 0 >0 <0 0 Linkskurve fallend >0 <0 0 Gerade waagesteigend rechte Tangente fallend waagerecht >0 Rechtskurve steigend fallend waagesteigend rechte Tangente Typische Verläufe konstante Geschwindigkeit konstante Beschleunigung a a lineare Beschleunigung Kraftstöße a konstant a linear a+0 t v t v t v konstant t v quadratisch linear Sprung t s t s linear t s quadratisch t s kubisch Knick t t t t 16 2 Geradlinige Bewegung eines Massenpunkts Beschreibung unstetiger Zeitverläufe Zur Beschreibung nur abschnittsweise stetiger Funktionen eignet sich das Föppl−Symbol: ǂt * tjǃ n ȡ 0 n +ȥ ǒt * t j Ǔ Ȣ ǂt * t j ǃ für t t tj für t w tj 0 ǂt * t j ǃ 1 ǂt * t j ǃ 1 1 2 1 tj t tj t tj Die Regeln für Differentiation und Integration entsprechen den üblichen Funktionen: d ǂt * t ǃ n + nǂt * t ǃ n*1 j j dt für ŕ ǂt * t ǃ dt + n )1 1 ǂt * t ǃ t n j 0 j nw1, n)1 . t 2 Geradlinige Bewegung eines Massenpunkts 17 2.2 Kinetik des Massenpunkts Definitionen Massenpunkt: Größe des betrachteten Körpers vernachlässigbar gegen Bahnbewegung (auch Punktmasse, materieller Punkt) ³ Impuls: ³ ³ v ³ p(t) + mv(t) p m m + const. . . ³ Impulsänderung: ³ p + mv³ + ma 2. Newton’sches Grundgesetz (Impulssatz, Principia 1687) Mutationem motus proportionalem esse vi motrici impressae, et fieri secundum lineam rectam qua vis illa imprimitur. (Die Änderung der Bewegungsgröße ist der Einwirkung der bewegenden Kraft proportional und erfolgt in der Richtung, in der diese Kraft wirkt.) heutige Interpretation: . ³ ³ p+F oder ³ ³ ma + F geradlinige Bewegung: ma(t) + F(t) direktes Problem der Dynamik: F(t) gegeben ³ inverses Problem der Dynamik: a(t) gegeben ³ ³ F ³ a m ÌÌÌÌ ÌÌ Ì ÌÌ ÌÌ F(t) F(t) a(t) + m F(t) + ma(t) a(t) 18 2 Geradlinige Bewegung eines Massenpunkts 2.3 Berechnung von Bewegungsabläufen Grundaufgaben unabh. Variable geg. Fkt. s(t) 1 gesuchte Funktionen v(t) + ds dt ³ ŕ v(t) dt t 2 t v(t) s(t) + s 0 ) a(t) + dv dt a(t) + dv dt t0 ŕ a(t) dt ŕ v(t) dt t a(t) 3 v(t) + v 0 ) t ³ s(t) + s 0 ) t0 v(s) 4 5 s 6 7 8 v a(s) v(s) +" t(s) + t 0 ) s0 Ǹ 1 dtńds ³ t(s) + t 0 ) ŕ v(s)ds s0 ³ a(s) + v dv ds s(v) a(v) + v dsńdv t(v) )2 s s0 ³ t(v) + t 0 ) v0 ŕ a(v) + 1 dtńdv dv ŕ a(v) v v v0 9 ŕ a(s) ds s v 20 v(s) + s(v) + s 0 ) ŕ v(s)ds s a(s) + v dv ds t(s) a(v) t0 v dv a(v) dv ŕ a(v) v t(v) + t 0 ) v0 ŕ va(v)dv v ³ s(v) + s 0 ) v0