R1 R2 R2 R1 - fabis
Werbung

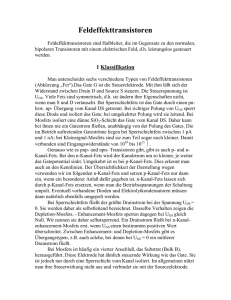
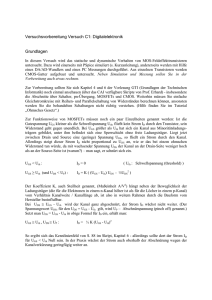
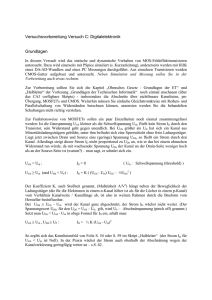
Formelsammlung Schaltungstechnik I 1 1 Kirchhoff’sche Gesetze Gültigkeit nur dann gegeben, wenn Bedingung d λ = fc erfüllt ist (d: räumliche Ausdehnung der Schaltung, c: Ausbreitungsgeschwindigkeit im jeweiligen Medium , f : Signalfrequenz). P → KCL: Knoten ik (t) = 0: in einen Knoten hineinfließende Ströme werden negativ gezält, andere positiv P → KVL: M aschen um (t) = 0: Spannungen in Umlaufrichtung der Masche positiv, andere negativ 2 Resistive Eintore (Zweipole) 2.1 Beschreibungsformen → implizite Darstellung: (existiert immer, nicht eindeutig): Nullstellenmenge fF (u, i) = 0, Beispiel: Diodenkennlinie in impliziter Form fF (u, i) = i − Is (exp UuT − 1) = 0 → parametrisierte Darstellung: (nicht eindeutig): u = uF (λ), i = iF (λ) → explizite Darstellung: (eindeutig): u = r(i), i = g(u) Sofern möglich, stets explizite Funktionsgleichungen verwenden! 2.2 Eigenschaften → gepolt/ungepolt: bei ungepolten Bauteilen ist die Kennlinie punktsymmetrisch zum Ursprung; d.h. falls (u, i) ∈ F ⇒ (−u, −i) ∈ F → aktiv/passiv: F heißt aktiv, falls ∃(u, i) ∈ F : u · i < 0 (Kennlinie besitzt einen gewissen Teil im zweiten oder vierten Quadranten) F heißt passiv, falls ∀(u, i) ∈ F : u · i > 0 (Kennlinie verläuft nur im ersten und dritten Quadranten) → verlustfrei/verlustbehaftet: F heißt verlustfrei, falls ∀(u, i) ∈ F : u · i = 0, F heißt verlustbehaftet, falls ∃(u, i) ∈ F : u · i 6= 0 → quellenfrei: (u = 0V, i = 0A) ∈ F → stromgesteuert: es existiert eine explizite Beschreibung der Form u = r(i) (Strom als steuerende Größe für die Spannung) → spannungsgesteuert: es existiert eine explizite Beschreibung der Form i = g(u) (Spannung als steuernde Größe für den Strom) → strenglinear: Kennlinie des Bauteils ist eine lineare Funktion mit (u = 0V, i = 0A) ∈ F → linear: Kennlinie des Bauteils ist eine affine Funktion: (u = 0V, i = 0A) ∈ / F im Allgemeinen → dual: Strom und Spannung ändern ihre Rolle: (u, i) ∈ F ⇒ (Rd i, Rud ) ∈ Fd ; graphisch geschieht eine Dualwandlung durch Spiegelung der Kennlinie an der Winkelhalbierenden des ersten und dritten Quadranten (auf richtige Skaleneinteilung achten) 2.3 Zusammenschaltung von Eintoren → Serienschaltung: R1 R2 Rges = R1 + R2 Graphisches Vorgehen: Addition der Spannungswerte bei gleichen Stromwerten (Graphen nebeneinander) Fabian Steiner, <[email protected]> → Parallelschaltung: R1 R2 Rges = R1 k R2 = R1 R2 R1 +R2 = G1 + G2 Graphisches Vorgehen: Addition der Stromwerte bei gleichen Spannungswerten (Graphen untereinander) Formelsammlung Schaltungstechnik I 2 2.4 Quellwandlungen Oftmals kann sich die Analyse einer Schaltung vereinfachen, wenn eine Quellwandlung vorgenommen wird. Insbesondere bei einer Knotenspannungsanalyse ist dieser Schritt sogar erforderlich: → Mayer-Norton: → Helmholtz-Thévenin: i0 R U0 u0 I0 = U0 R i0 G= 1 R i0 = Gu0 − GU0 = Gu0 − I0 , mit G = u0 = U0 + Ri0 1 R ACHTUNG! Geänderte Zählpfeilrichtung unbedingt beachten! 2.5 Linearisierung von nicht-linearen Bauelementen 0 1 11 0 1 0 0 1 0 0 1 0 1 0 1 0 1 11 00 0 1 11 00 0 1 0 1 0 1 01 1 0 01 1 0 0 1 0 1 0 1 0 1 01 1 0 01 1 0 0 1 1111 0000 0 1 R i0 i u0 u U0 Q IAP AP 1. Arbeitspunktbestimmung (graphisch oder rechnerisch): hierzu ist zunächst eine Aufteilung der Schaltung in Quellen- und Lasteintor nötig (wie auch in nebenstehender Graphik veranschaulicht) • graphische Arbeitspunktbestimmung: hierzu wird in den Graphen des Eintors die externe Quellenkennlinie Qx (Quellenkennlinie Q gespiegelt an der u-Achse) eingezeichnet; die hierdurch entstehenden Schnittpunkt spezifizieren mögliche APs • rechnerische Arbeitspunktbestimmung: der Ansatz hierfür besteht in den beiden folgenden Gleichungen, die nach einer passenden Variablen aufgelöst und anschließend in einander eingesetzt werden: UAPU0 Qx u = u0 i = −i0 2. Linearisierung der Beschreibungsgleichungen u = r(i), i = g(u) in der Umgebung des AP • graphische Linearisierung: Errichten einer Tangente an die Eintor-Kennlinie im gemeinsamen AP • rechnerische Linearisierung: Berechnen der Steigung der Tangente durch Ableiten im AP, Einsetzen in die Punkt-Steigungs-Form (y = m(x − x0 ) + y0 ) dr(i) = r ⇒ ∆u = r(∆i − IAP ) + UAP di AP dg(u) = g ⇒ ∆i = g(∆u − UAP ) + IAP du AP Fabian Steiner, <[email protected]> Formelsammlung Schaltungstechnik I 3 2.6 Wichtige Eintore Bauteilsymbol Beschreibung Kennlinie Leerlauf: u = beliebig, i = 0 Kurzschluss: u = 0, i = beliebig Nullator: u = 0, i = 0 Norator: u = beliebig, i = beliebig R= 1 G G Widerstand: u = Ri, i = Gu R G konkaver Widerstand: beschrieben durch das Parameterpaar (G, U ): Kennlinie besteht demnach aus einer Halbgerade von (−∞, U ) auf der u-Achse sowie einer weiteren Halbgeraden vom Punkt (U, 0) aus und der Steigung G; kann zur besseren Modellierung einer realen Diode genutzt werden G konvexer Widerstand: beschrieben durch das Parameterpaar (R, I): Kennlinie besteht demnach aus einer Halbgerade von (−∞, I) auf der i-Achse sowie einer weiteren Halbgeraden vom Punkt (0, I) und der Steigung 1/R U I R reale Diode realle Diode ideale Diode pn-Diode: u = UT (ln ( Iis + 1)), i = Is (eu/UT − 1) ideale Diode: id = 0A für uD < 0V , id = beliebig für uD = 0V (bei Schaltungsanalyse jeweils Fallunterscheidung nach den beiden Bereichen notwendig) Zenerdiode: unterhalb der Zenerspannung UZ fließt ein großer Strom (Zenereffekt); häufig zur Spannungsstabilisierung eingesetzt U0 ideale Diode UZ Spannungsquelle: u = U0 , i = beliebig U0 I0 Stromquelle: u = beliebig, i = I0 Fabian Steiner, <[email protected]> I0 Formelsammlung Schaltungstechnik I 4 3 Zweitore (Vierpole) 3.1 Beschreibungsformen u → Kernbeschreibung: diese entspricht der impliziten Beschreibung bei Eintoren: M N · = 0; sind i M oder N invertierbar so lassen sich hieraus auch die entsprechenden expliziten Beschreibungen gewinnen u U → Bildbeschreibung: = · c; die Matrix i I (1) u1 (1) U u2 = (1) I i1 (1) i2 (2) u1 (2) u2 (2) i1 (2) i2 ist dabei die Betriebsmatrix, welche stets durch zwei möglichst einfache, linear unabhängige Messungen (1) (2) (z.B. 1. Messung u1 = 1V , u2 (1) = 0V , 2. Messung: u1 = 0V , u2 (2) = 1V ) bestimmt werden kann; folglich keine eindeutige Lösung möglich, da beliebig mit Skalar multiplizierbar → explizite Beschreibung: – – – – – – Widerstandsbeschreibung: u1 = r1 (i1 , i2 ), u2 = r2 (i1 , i1 ) Leitwertsbeschreibung: i1 = g1 (u1 , u2 ), i2 = g2 (u1 , u2 ) Hybridbeschriebung: u1 = h1 (i1 , u2 ), i2 = h2 (i1 , u2 ) inverse Hybridbeschreibung: i1 = h01 (u1 , i2 ), u2 = h02 (u1 , i2 ) Kettenbeschreibung: u1 = a1 (u2 , −i2 ), i1 = a2 (u2 , −i2 ) inverse Kettenbeschreibung: u2 = a01 (u1 , −i1 ), i2 = a02 (u1 , −i1 ) 3.2 Umrechnen der Zweitormatrizen Tabelle zur Umrechnung siehe letzte Seite dieser Formelsammlung. 3.3 Eigenschaften → verlustlos: ∀t : p1 (t) + p2 (t) = 0 ⇔ uT · i = 0; anderenfalls ist das Zweitor verlustbehaftet u → aktiv/passiv: F heißt aktiv, falls ∃ ∈ F : uT · i < 0; der Fall eines passiven Zweitors liegt also vor i u wenn ∀ ∈ F : uT · i ≥ 0; Aktivität und Verlustlosigkeit schließen demnach einander aus! i → Dualität: wie auch bei Eintoren tauschen hier u und i über die Dualitätskonstante Rd ihre Rollen: d U = Rd · Id , I = U Rd → Umkehrbarkeit: ein Vertauschen der beiden Tore hat keinen Einfluss auf den Betriebsraum; R = 0 1 0 0 PRP, G = PGP, H = PH P, A = A , wobei P die sog. Permutationsmatrix P = bezeich1 0 net → Reziprozität: Übertragungssymmetrie: G = GT , R = RT , det A = det A0 = 1 Fabian Steiner, <[email protected]> Formelsammlung Schaltungstechnik I 5 3.4 Verschaltung von Zweitoren Parallelschaltung: Serienschaltung i1 Z1 i1 i2 Z1 i2 u1 u2 u1 u2 Z2 Z2 Gges = GZ1 + GZ2 Rges = RZ1 + RZ2 Serienparallelschaltung Parallelserienschaltung: i2 i1 i1 Z1 Z1 u1 u2 u1 u2 Z2 Z2 0 = HZ0 1 + HZ0 2 Hges Kettenschaltung Hges = HZ1 + HZ2 i1 u1 i2 Z1 Z2 Ages = AZ1 · AZ2 oder A0ges = A0Z2 · A0Z1 Fabian Steiner, <[email protected]> i2 u2 Formelsammlung Schaltungstechnik I 6 3.5 Wichtige Zweitore USI ISI i1 u i2 = βi1 i = gu G= −1 g 0 0 ,A = 0 0 0 g H= 0 USU 0 0 ,A = 0 0 0 − β1 ISU u1 0 0 β i u2 = µu1 H = 1 0 0 ,A = µ µ 0 0 u = ri 0 R= r 0 0 0 0 ,A = 1 0 r 0 0 Nullor i = 0A u = 0V 1 0 0 M= N= 0 0 1 Gyrator 0 0 A= 0 0 0 0 R1 : R2 i2 i1 u2 u1 Beschreibungsgleichungen: u1 = −i2 R1 , u2 = i1 R2 1 0 1 0 0 R1 0 R2 M= N= G= R = 0 1 −R2 0 R2 − R11 0 0 −R1 A= 1 0 R2 R1 0 A0 = 0 − R11 −R2 0 Bedeutung/Aufgabe: Anwendung als Dualwandler (Kapazität ↔ Induktivität, Stromquelle ↔ Spannungsquelle) NIK (Negativer Immitanz Konverter) i1 i2 u1 M= u2 1 0 0 k N= 0 1 0 1 k H= 0 −k −k 0 H0 = 0 − k1 − k1 0 Bedeutung/Aufgabe: Realisation eines negativen Widerstands Fabian Steiner, <[email protected]> A= −k 0 0 1 k A0 = − k1 0 0 k Formelsammlung Schaltungstechnik I 7 4 Bipolartransistoren 4.1 Ebers-Moll-Modell ie αR i2 αF i1 ic i1 Vorwärtsbetrieb (normaler Betriebsmodus), npn-Typ: → ucb ≥ 0: Kollektor-Basis-Diode sperrt i2 ueb ib ucb → ube ≥ 0: Emitter-Basis-Diode in Durchlassrichtung 4.2 Vereinfachende ESBs für Emitterschaltung Großsignal Kleinsignal ic = βib ube β∆ib uce ∆ube ∆ic ∆uce detailliert ic = βib ube = 0.6V ∆ic uce∆ube = 0V ∆uce grob 5 Feldeffekt-Transistoren, MOSFETS → MOSFET: Metall Oxide Semiconductor Field Effect Transistor → CMOS: Complementary Metall Oxide Semiconductor, d.h. Verwendung komplementärer Bauteile in einer Schaltung (p-MOS, n-MOS); Vorteil dieses Vorgehens besteht darin, dass in den beiden Hauptbetriebsbereichen u = UB und u = 0V kaum eine Stromentnahme aus der Quelle stattfindet 5.1 Shichman-Hodges-Modell → n-Kanal-Enhancement (normally-off) D G ig → n-Kanal-Depletion (normally-on) D id uds G S id uds S Uth ≥ 0 id ig Uth ≤ 0 ugs = 2.5V ugs = 2V ugs = 1.5V uds id ugs = 1V ugs = 0V ugs = −0.5V uds ig = 0A ugs − Uth ≤ 0 (Sperrbereich) 0, id = β (ugs − Uth )uds − 12 u2ds (1 + λuds ), 0 ≤ ugs − Uth ≥ uds (linearer Bereich) 1 2 0 ≤ ugs − Uth ≤ uds (Sättigungsbereich) 2 β (ugs − Uth ) (1 + λuds ), → p-Kanal-Enhancement (p-Kanal-Depletion findet in der Praxis keine Anwendung): Fabian Steiner, <[email protected]> Formelsammlung Schaltungstechnik I D G ig 8 id id uds S uds ugs = −2.5V ugs = −2V ugs = −1.5V ig = 0A ugs − Uth ≥ 0 (Sperrbereich) 0, 1 2 id = −β (ugs − Uth )uds − 2 uds (1 − λuds ), 0 ≥ ugs − Uth ≤ uds (linearer Bereich) 1 0 ≥ ugs − Uth ≥ uds (Sättigungsbereich) − 2 β(ugs − Uth )2 (1 − λuds ), Der Term 1 + λuds beschreibt die sog. Kanallängenmodulation, also eine Bauteilspezifische Eigenart. Diese Erweiterung kann in der Regel vernachlässigt werden. 5.2 Kleinsignal-ESB → Sättigung: ∆ugs id = id = gm ∆ugs 1 β(ugs − Uth )2 2 ∂id = β(Ugs − Uth ) = gm ∂ugs AP ∂id =0 ∂uds ∆uds AP → linearer Bereich: ∆ugs g0 1 id = β (ugs − Uth )uds − u2ds 2 ∆id gm ∆ugs ∆uds ∂id = βUds = gm ∂ugs AP ∂id = β(Ugs − Uth ) − βUds = g0 ∂uds AP 6 Operationsverstärker → Kennlinie eines idealisierten Operationsverstärkers (mit unendlicher Verstärkung): uout Usat uout = −Usat , ud < 0V uout = 0V, ud = 0V ud (Nullormodell) uout = +Usat , ud > 0V −Usat → ESB: ud uout Nullormodell, d.h. ud = 0V Fabian Steiner, <[email protected]> ud Usat positive Sättigung uout ud −Usat negative Sättigung uout Formelsammlung Schaltungstechnik I 9 7 Knotenspannungsanalyse 7.1 Generelles Vorgehen 1. Linearisierung 2. nicht-spannungsgesteuerte Elemente (Spannungsquelle, ISI, ISU) ersetzen (z.B. mittels Gyrator, Quellwandlung vornehmen, R und −R in Reihe) 3. Knoten bis auf Masse nummerieren 4. einzelne Elemente wie unten gezeigt in Knotenspannungsmatrix YK eintragen 7.2 Eintragung von Bauelementen . .. Quellen: α Widerstände: α α −I0 . .. iq = β I0 .. . I0 β α β α . . . G . . . −G . . . . .. .. .. = ... . . . .. β . . . −G . . . G . . . G YK β USI: + + α u β α(+) γ YK i = gu δ − − g .. . ... .. . −g .. . −g ... g γ(+) . . . .. = ... . δ(−) ... β(−) ... .. . ... Gyrator: ... α α GD γ YK β δ α ... ... .. .. .. . . . β ... ... . . .. = .. .. . γ . . . −GD .. .. . . .. . δ ... GD ... β ... γ ... δ ... .. . ... .. . ... .. . GD .. . ... .. . −GD .. . ... .. . ... .. . ... .. . −GD .. . ... .. . GD .. . ... .. . GD .. . ... .. . ... .. . ... .. . ... .. . ... −GD ... ... ... ... Nullator: α β Addition der Spalten α und β; Ergebnis hiervon wird z.B. in Spalte α zusammengefasst, Spalte β wird gestrichen – entsprechendes geschieht mit ukβ im uK Vektor; ist einer der beiden Knoten der Bezugsknoten, so wird die betreffende Spalte komplett gestrichen Norator: α β Addition der Zeilen α und β; Ergebnis hiervon wird z.B. in Zeile α zusammengefasst, Zeile β wird gestrichen – entsprechendes geschieht mit iqβ im iq Vektor; ist einer der beiden Knoten Bezugsknoten, so wird die betreffende Zeile komplett gestrichen Fabian Steiner, <[email protected]> Fabian Steiner, <[email protected]> A0 A H0 H G R R r11 r12 r21 r22 r22 −r12 1 det R −r 21 r11 det R r12 1 r22 1 −r21 1 −r 12 1 r11 r21 det R r11 det R 1 r21 r22 1 r det Rr 22 1 r12 1 r11 G g22 −g12 1 det G −g 21 g11 g11 g12 g21 g22 1 −g12 1 g11 g det G 21 det G g 12 1 g22 −g 1 21 −g22 −1 1 g21 − det G −g11 −g11 −1 1 g12 − det G −g22 H det H h12 1 h22 1 −h21 1 −h12 1 h11 h21 detH h11 h12 h21 h22 h22 −h12 1 det H −h h11 21 − det H −h 11 1 h21 −h −1 22 1 h11 1 h12 h22 det H H0 −h012 1 0 H0 h 21 det 0 det H h012 1 0 h022 1 −h0 21 h22 −h012 1 0 0 det H0 21 −h h11 0 0 h11 h12 0 0 h21 h220 1 h22 1 0 0 h021 h det 11 0 H 0 − det H −h22 1 h012 −h011 −1 1 h011 A a11 det A a22 1 a22 − det A 1 a12 a11 −1 a12 det A 1 a22 a21 −1 a − det A 21 1 a11 1 a 12 a11 a12 a 21 a22 a22 a12 1 det A a 21 a11 1 a21 A0 1 a022 1 0 0 a021 det0 A a11 a11 −1 1 0 0 a012 − det A a 22 0 a12 1 1 a011 A0 a021 − det 0 a21 −1 1 0 0 a022 det A a 12 0 0 a22 a12 1 0 0 det A0 0 a21 0 a11 a11 a12 a021 a022 Formelsammlung Schaltungstechnik I 10