GRAPHENTHEORIE
Werbung

GRAPHENTHEORIE
Grundlagen für Routen- und Tourenplanung
Algorithmen – Implementierungen - Anwendungen
Prof. Dr. Heinrich Paessens
Fachhochschule Flensburg
IUT Strasbourg Sud
1.
Grundlagen
1.1 Graphen-Definitionen
1.2 Darstellung von Problemen durch Graphen
1.3 Speicherung von Graphen
2.
Algorithmen
2.1 Nachfolger und Vorgänger
2.2 Kürzeste Wege Algorithmen
Dijkstra-Algorithmus
Ford-Algorithmus
Tripel-Algorithmus
2.3 Tourenplanung – Saving-Algorithmus
3.
Implementierungen – Übungen
4.
Anwendungen
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 1 von 39
1.1
GRAPHEN - DEFINITIONEN
Definition1:
Ein ungerichteter Graph G = (V,E) besteht aus einer Menge von Knoten
V={1,2,...,n} und Kanten E={e1,e2,...,em}. Die Anzahl der Knoten wird mit
n, die Anzahl der Kanten mit m bezeichnet.
Die einer Kante e zugeordneten Knoten i, j werden Endknoten von e
genannt. Man schreibt e = (i, j) oder e = (j, i) und sagt, daß die Kante e die
Knoten i, j "verbindet". Knoten i heißt Nachbar des Knotens j und
umgekehrt, falls e = (i, j) eine Kante in G ist.
Ein gerichteter Graph G = [V,E] besteht aus einer Menge von Knoten
V={1,2,...,n} und Pfeilen E={e1,e2,...,em}. Die Anzahl der Knoten wird
wiederum mit n, die Anzahl der Pfeile mit m bezeichnet. Ein gerichteter
Graph G = [V,E] wird auch Digraph D = [V,E] genannt.
Ein Graph G = (V,E), der sowohl Pfeile wie auch Kanten enthält, heißt
gemischter Graph.
Für einen Pfeil e wird e = [i, j] geschrieben; i heißt Anfangsknoten und j
Endknoten des Pfeiles e. Man sagt auch, daß der Pfeil e "vom Knoten i
ausgeht" und "in den Knoten j einmündet". Knoten j wird (unmittelbarer)
Nachfolger von Knoten i, Knoten i (unmittelbarer) Vorgänger von
Knoten j genannt. Die Menge aller Nachfolger eines Knotens i wird mit
Si und die Menge aller Vorgänger eines Knotens i mit Pi bezeichnet.
Definition 2:
Ist jeder Kante e (jedem Pfeil e) eines Graphen G (Digraphen D) eine
Bewertung c(e) zugeordnet, so wird G = (V,E,c) bewerteter Graph (D =
[V,E,c] bewerteter Digraph) genannt.
Definition 3:
Ein Weg w=(i,...,j) in einem ungerichteten Graphen G bzw. ein Weg
w=[i,...,j] in einem Digraphen D ist eine Aufeinanderfolge von
zusammenhängenden Kanten bzw. Pfeilen entsprechender Richtung mit
Anfangsknoten i und Endknoten j.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 2 von 39
Ein Knoten j heißt von einem Knoten i aus erreichbar ,falls ein Weg von i
nach j existiert.
Ein Weg w mit unterschiedlichen Anfangsknoten i und Endknoten j (i≠j)
wird als offener Weg bezeichnet.
Ein Weg w, dessen Anfangs- und Endknoten identisch sind (i=j), wird
als geschlossener Weg oder Rundreise oder Zyklus bezeichnet.
Ein Weg w, der jede Kante bzw. jeden Pfeil eines Graphen G genau
einmal enthält, wird Eulerlinie genannt.
Ein Weg w, der jeden Knoten eines Graphen G genau einmal enthält,
wird Hamiltonlinie genannt.
Weitere Typen von Wegen in Graphen sind von praktischer Bedeutung:
(1) Ein Weg w, der jede Kante (bestimmte Kanten) bzw. jeden Pfeil
(bestimmte Pfeile) eines Graphen G mindestens einmal enthält
(2) Ein Weg w, der jeden (bestimmte) Knoten eines Graphen G
mindestens einmal enthält
DEFINITION 4:
Die Länge eines Weges c(w) ergibt sich aus der Aufsummierung der
Bewertungen der benutzten Kanten bzw. Pfeile des Weges w.
Ein Weg w in einem Graphen G, der unter allen von Knoten i nach
Knoten j führenden Wegen die geringste Länge besitzt, heißt kürzester
Weg von i nach j.
Entsprechend wird eine Rundreise mit geringster Länge kürzeste oder
auch minimale Rundreise genannt.
DEFINITION 5:
Unter dem Grad eines Knotens i in einem ungerichteten Graphen G
versteht man die Anzahl derjenigen Kanten, die diesen Knoten als Endknoten besitzen ("berühren"), in Zeichen δ i.
Unter dem positiven (negativen) Grad eines Knotens i in einem
Digraphen D versteht man die Anzahl der Pfeile, die diesen Knoten als
Anfangsknoten (Endknoten) besitzen, in Zeichen δ +i (δ -i).
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 3 von 39
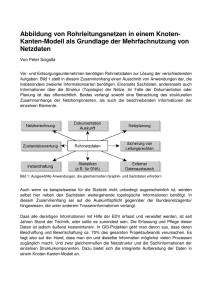
WEG
GESCHLOSSEN
ZYKLUS
RUNDREISE
KNOTEN
JEDER
JEDER
BEST.
KNOTEN
KNOTEN KNOTEN
GENAU 1X MIND. 1X
G. HAMILTON LINIE
TSP
OFFEN
KANTEN / PFEILE
JEDE
KANTE/
PFEIL
GENAU 1X
G. EULERLINIE
JEDE
KANTE/
PFEIL
MIND. 1X
BEST.
KANTEN/
PFEILE
KNOTEN
JEDER
JEDER
KNOTEN KNOTEN
GENAU 1X MIND. 1X
O. HAMILTON LINIE
KANTEN / PFEILE
BEST.
KNOTEN
JEDE
KANTE/
PFEIL
GENAU 1X
O. EULERLINIE
JEDE
KANTE/
PFEIL
MIND. 1X
CPP
BEI VORLIEGEN EINES BEWERTETEN GRAPHEN KÖNNEN MINIMALE / MAXIMALE WEGE (ZYKLEN, RUNDREISEN,...) BESTIMMT WERDEN.
MÖGLICHE WEGE -TYPEN
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 4 von 39
BEST.
KANTEN/
PFEILE
ANMERKUNGEN zu Eulerlinien:
Regeln in ungerichteten Graphen G:
Ist der Grad eines jeden Knotens in einem Graphen G gerade, so ist ein
geschlossener Weg (Rundreise) w, der jede Kante von G genau einmal
enthält (geschlossene Eulerlinie), in G möglich.
Ist der Grad von genau 2 Knoten in einem Graphen G ungerade und der
Grad aller übrigen Knoten in G gerade, so ist ein offener Weg w, der jede
Kante von G genau einmal enthält (offene Eulerlinie), in G möglich.
Anfangs- und Endknoten des Weges w sind dabei die beiden Knoten mit
ungeradem Grad.
Regeln in Digraphen D:
Gilt für jeden Knoten i in D δ +i = δ -i , so ist eine geschlossene Eulerlinie
in D möglich.
Gilt für genau 2 Knoten i und j in D δ +i = δ +j +1 und δ -i = δ -j -1 sowie
für alle anderen Knoten k δ +k = δ -k so ist eine offene Eulerlinie in D
möglich. i ist der Anfangsknoten und j der Endknoten der Eulerlinie.
DEFINITION 6:
Ein Knoten i ohne Vorgänger, d.h. δ -i=0, mit δ +i>0 wird Quelle, ein
Knoten i ohne Nachfolger, d.h. δ +i=0, mit δ -i>0 wird Senke genannt.
DEFINITION 7:
(1) Ein Knoten i mit δ i = 0 bzw. mit δ +i = δ -i = 0 heißt isoliert .
(2) Existieren mehrere Kanten (Pfeile), die dieselben Endknoten
(Anfangs- und Endknoten) besitzen, so nennt man diese Kanten (Pfeile)
parallel.
(3) Stimmen die beiden Endknoten einer Kante (Anfangs- und
Endknoten eines Pfeiles) miteinander überein, dann bezeichnet man
diese(n) Kante (Pfeil) als Schlinge.
(4) Ungerichtete (gerichtete) Graphen, die sich in der Ebene ohne
Überschneiden von Kanten (Pfeilen) zeichnen lassen, nennt man planar.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 5 von 39
DEFINITION 8:
Ein Graph G heißt vollständig, wenn je zwei verschiedene Knoten i und
j des Graphen G durch mindestens eine Kante (i, j) bzw. durch
mindestens einen Pfeil [i, j] sowie einen entgegengesetzt gerichteten
Pfeil [j, i] miteinander verbunden sind.
DEFINITION 9:
Ein gerichteter Graph D heißt symmetrisch, falls für alle Pfeile von D gilt
[i, j] ∈ E
⇒
[j, i] ∈ E .
DEFINITION 10:
Die Adjazenzmatrix A(D) eines Digraphen D = [V,E] mit V = {1, ..., n} ist
eine n x n - Matrix mit den Elementen
1
, falls [i,j] ∈ E
aij :=
0
, sonst .
DEFINITION 11:
Die einem bewerteten Digraphen D = [V,E,c] zugeordnete n x n - Matrix
C(D) mit den Elementen
0
, falls i = j
cij :=
c ([i,j])
, falls e=[i,j] ∈ E
∞
, sonst
heißt Bewertungsmatrix von D.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 6 von 39
DEFINITION 12:
Sei D = [V,E,c] ein bewerteter Digraph mit E = {e1, ..., em}. Dann heißen
die Vektoren
anf1
...
anfm
anf :=
end 1
...
end m
end :=
Anfangsknotennummernvektor bzw. Endknotennummernvektor,
wobei anfi (endi) die Knotennummer des Anfangsknotens (Endknotens)
des Pfeiles ei ist.
Der Vektor
c :=
c1
...
cm
wird Bewertungsvektor genannt.
DEFINITION 13:
Eine Numerierung der Pfeile eu = [anfu, endu] (anfu, endu ∈ V),
u = 1, ..., m eines Digraphen D = [V,E] mit E = {e1, ..., em}, für die
u>w
⇒
anfu ≥ anfw
gilt, heißt Pfeilsortierung von D,
nummernvektor ist aufsteigend sortiert.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
d.h.
27.04.2003 19:52
(1 ≤ w < u ≤ m)
der
Anfangsknoten-
Seite 7 von 39
DEFINITION 14:
Sei D = [V,E] ein pfeilsortierter Digraph mit V = {1, ..., n} und E = {e1, ...,
em}. Dann wird der Vektor
pn1
pn :=
...
pnn+1
Pfeilnummernvektor von D genannt, wobei pni die Pfeilnummer
desjenigen Pfeiles ist, der unter allen von Knoten i ausgehenden Pfeilen
die kleinste Pfeilnummer hat (i = 1, ..., n).
Ist ein Knoten j eine Senke, so wird pnj := pnj+1 gesetzt.
Zweckmäßigerweise ist pnn+1 := m + 1 festgelegt.
Definition 15:
Sei D = [V,E,c] ein bewerteter Digraph ohne Zyklen negativer Länge und
c*(w) die Länge des kürzesten Weges w = [i, ..., j] von i nach j, dann heißt
die Größe
0
, falls i = j
kij :=
c*(w) , w = [i, ..., j]
∞
, falls j von i aus nicht erreichbar
Entfernung von i nach j und die n x n - Matrix K(D) mit den Elementen
kij Entfernungsmatrix von D.
Definition 16:
Sei D = [V,E] ein Digraph. Dann heißt die n x n - Matrix P(D) mit den
Elementen
i
, falls i = j oder [i,j] ∈ E
pij :=
0
, sonst
Vorgängermatrix von D.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 8 von 39
Definition 17:
Ein Graph G heißt zusammenhängend, wenn jeder Knoten in G von
jedem anderen Knoten aus erreichbar ist.
Definition 18:
Sei G = (V,E) ein zusammenhängender Graph. Der zusammenhängende
Graph G' = (V,E') mit E' ⊂ E heißt dann spannender Baum oder Gerüst
von G, wenn G' keinen Zyklus enthält. Ein Gerüst enthält m = n-1
Kanten.
Definition 19:
Sei G = (V,E,c) ein zusammenhängender, bewerteter Graph. Ein Gerüst
G' = (V,E',c') mit c'(e) = c(e) für alle e ∈ E' heißt Minimalgerüst von G,
wenn
∑ c'(e) → MIN
e∈E'
gilt.
Definition 20:
Eine Numerierung der Knoten eines zyklenfreien Digraphen D = [V,E]
mit
j ∈ Si
⇒
i<j
( 1 ≤ i,j ≤ n )
heißt Topologische Sortierung von D, d.h. die Knotennummer des
Anfangsknotens eines jeden Pfeiles von D ist kleiner als die
Knotennummer des Endknotens. Insbesondere ist in einem topologisch
sortierten Digraphen Knoten 1 eine Quelle und Knoten n eine Senke.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 9 von 39
1.2 DARSTELLUNG VON PROBLEMEN DURCH GRAPHEN
1.2.1
Orgastruktur eines Unternehmens:
Direktor
Kaufm. Abteilung
Techn. Abteilung
Konstr. Abt.
Prod. Abt.
Einkauf
Prod. A
1.2.2
Verkauf
Prod. B
Prod. C
Verkehrsnetz, Weg, Rundreise
2
7
5
1
1
1
1
4
3
1
9
5
5
a)
b
c)
Kürzester Weg 1 ->3:
w = (1, 4, 3)
c(w) = 2
1-4-3
Länge: 2
Kürzeste Rundreise derart, daß jeder Knoten mindestens einmal durchfahren
wird: 1-4-2-4-3-4-5-4-1
Kürzeste Rundreise derart, daß jede Kante mindestens einmal durchfahren
wird: 1-4-5-4-3-4-2-4-1-2-3-5-1
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 10 von 39
d)
Königsberger Brückenproblem:
C
g
c
d
e
A
D
f
a
B
b
Problem: Existiert eine Rundreise (Rundweg) - von einem beliebigen Startpunkt
ausgehend - derart, daß jede Brücke genau einmal benutzt wird ?
Darstellung als Graph:
C
c
g
d
e
A
D
b
a
f
B
oder
e
A
d
a
c
C
g
f
D
B
b
Das Problem ist nicht zu lösen, da nicht jeder Knoten eine von einer geraden Anzahl
von Kanten berührt wird.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 11 von 39
e)
‚Das Haus vom Nikolaus‘
‚Die Kirche vom Nikolaus‘
Probleme:
können diese Formen gezeichnet werden, ohne den
Zeichenstift während der Zeichnung abzuheben und ohne
eine Linie mehrfach zu zeichnen ?
Graphentheoretisch:
Existiert eine Rundreise derart, daß jede Kante genau
einmal benutzt wird (Start- und Endpunkt sind identisch)
?Existiert ein Weg derart, daß jede Kante genau einmal
benutzt wird (Start- und Endpunkt sind nicht identisch) ?
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 12 von 39
ANMERKUNG: Regeln in ungerichteten Graphen G:
Ist der Grad eines jeden Knotens in einem Graphen G gerade, so ist ein
geschlossener Weg (Rundreise) w, der jede Kante von G genau einmal enthält
(geschlossene Eulerlinie), in G möglich.
Ist der Grad von genau 2 Knoten in einem Graphen G ungerade und der Grad aller
übrigen Knoten in G gerade, so ist ein offener Weg w, der jede Kante von G genau
einmal enthält (offene Eulerlinie), in G möglich. Anfangs- und Endknoten des Weges
w sind dabei die beiden Knoten mit ungeradem Grad.
1.2.3
Sympathieproblem: n = 8 Gäste
Sympathien :
A-B B-A C-D
A-F B-E C-G
A-G B-H
Problem:
D-C
D-E
E-D
E-B
E-F
F-A
F-H
F-E
G-A
G-H
G-C
A,B,C,D,E,F,G,H
H-B
H-G
H-F
Ist eine Sitzordnung an einem runden Tisch derart möglich, daß nur
Personen nebeneinander sitzen, die sich sympathisch finden ?
Darstellung als Graph:
C
A
D
B
E
H
F
G
Graphentheoretisch:
Bestimmung einer Rundreise (Startpunkt = Endpunkt) derart,
daß jeder Knoten genau einmal benutzt wird
Mögliche Lösung:
F
A
E
B
D
H
C
G
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 13 von 39
1.2.4 Reihenfolge von Einzelarbeiten:
Netzplantechnik, Projektmanagement
4
Steckdosen
verlegen
1
1
Mauerdurchbrüche
5
Klimakanäle
verlegen
4
START
1
1
Klimaanlage
bestellen
Stromversorgung
bestellen
1.2.5
1
Lieferung
Klimaanlage
6
Klimaanlage
montieren
5
Klimaanlage
testen
1
ENDE
1
Erneuerungsproblem:
Planungszeitraum:
Betriebskosten im i-ten Jahr:
Beschaffungskosten zu Beginn des i-ten Jahres:
Verkaufswert nach i Jahren:
i
1
2
3
4
ci
5
10
15
20
Bi
100
120
100
105
i = 4 Jahre
ci
Bi
Si
Si
70
55
30
20
Problem:
Bestimmung des optimalen Erneuerungszeitpunktes
Graphentheoretisch: Darstellung einer jeden Möglichkeit durch einen mit
den entsprechenden Kosten bewerteten Pfeil. Die Knoten stellen
die Zeitpunkte dar. Bestimmung des kürzesten Weges von 1
(Startzeitpunkt) nach 5 (Endzeitpunkt)
60
1
35
2
130
100
55
3
35
40
4
5
60
80
120
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 14 von 39
1.2.6
Umfüllproblem:
3 Behälter:
7 Einheiten:
3 Einheiten:
1 Einheit:
Vorgabe Ziel
voll (7) 5
leer (0) 1
leer (0) 1
Problem:
Ist es möglich durch Umfüllen vom Zustand 700 in
den Zustand 511 zu gelangen (die Behälter sind nicht
mit Maßstriche gekennzeichnet !) ?
Graphentheoretisch:
Darstellung aller möglichen Zustandsveränderungen,
die mit einmaligem Umschütten erreicht werden
können, durch Pfeile. Die Knoten stellen die Zustände
dar. Existiert ein Weg von Knoten 700 nach Knoten
511 ?
Zustand:
700
Ziel:
511
Möglichkeiten: 700
601
430
601
700
610
331
430
700
331
421
610
700
601
430
511
331
601
430
421
430
520
331
601
511
610
601
331
520
520
421
511
700
430
700
601
Lösung:
Problemvariante:
Graphentheoretisch :
Problemvariante:
610
511
Die Zustandsveränderung soll durch möglichst wenig
Umschüttungen erfolgen.
Bewertung aller Pfeile mit 1; Bestimmung des
kürzesten Weges von Knoten 700 nach 511
Die Zustandsveränderung soll durch möglichst wenig
Gewichthochheben erreicht werden
Gewicht: 7 EH Gefäß: 4 kg
3 EH Gefäß: 2 kg
1 EH Gefäß:
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
1 kg
Seite 15 von 39
Graphentheoretisch:
Bewertung der Pfeile mit den entsprechenden Gewichten.
700
Alte Lösung:
7+4
601
1+1
610
6+4
511
430
3+2
421
1+1
520
= 23 kg
700
Optimale Lösung:
7+4
2+2
= 22 kg
1.2.7
Überführungsproblem:
F -->
W -->
Z -->
K -->
Fährmann
Wolf
Ziege
Kohl
- Boot kann nur 2 Objekte transportieren
- bei Abwesenheit vom Fährmann frißt der Wolf
die Ziege und die Ziege den Kohl
F, W, Z, K
Ziel: möglichst wenig Überfahrten
Zustände vor bzw. nach den Überfahrten.
FWZ
K
WK
W
FZW
FWK
K
FZK
Z
Z
FZW
W
FWK
FZ
FZK
D:\IUT-Strasbourg\doc\graph_iut_d.doc
FZ
WK
FWZ
K
K
27.04.2003 19:52
Seite 16 von 39
511
1.2.8
Transportplanung Hausmüllentsorgung:
Die Gemeinde G hat die Möglichkeit den Hausmüll direkt zu den Deponien D1 und
D2 oder über die Umladestationen U1 und U2 zu entsorgen. Die dabei entstehenden
Transportkosten/Mengeneinheit (TK/ME) sind folgender Tabelle zu entnehmen:
U1
15
G
U1
U2
1)
U2
18
D1
29
6
4
D2
23
3
6
Die Entsorgungsstruktur mit minimalen Transportkosten ist zu ermitteln. Stellen
Sie dazu dieses Problem als Graph dar und führen Sie die Lösung des
Problems auf eine graphentheoretische Problemstellung zurück.
29
U1
6
D1
3
15
G
4
18
U2
6
D2
23
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 17 von 39
2)
Die Deponierungskosten/ME betragen: D1: 20,
D2: 24.
Die Entsorgungsstruktur mit minimalen Transport- und Deponierungskosten ist
zu ermitteln
29
U1
D1
6
20
3
15
S
G
4
18
24
6
U2
D2
23
3)
Die Umladekosten/ME betragen: U1: 6,
Die Entsorgungsstruktur mit minimalen
Umladekosten ist zu ermitteln
U2: 4.
Transport-, Deponierungs- und
29
U1
6
6
U1'
D1
3
15
20
4
G
18
U2
4
U2'
S
6
D2
24
23
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 18 von 39
1.3 Speicherung von Graphen
Digraph D1 (siehe oben)
a)
Adjazenzmatrix: A(D1)
1
0
0
0
0
0
1
2
3
4
5
b)
2
1
0
0
0
1
3
1
0
0
0
1
4
0
1
1
0
0
5
0
1
1
0
0
Bewertungsmatrix: C(D1)
1
2
3
4
5
1
0
∞
∞
∞
∞
c) Vektorform
e1
e2
e3
e4
e5
e6
e7
e8
2
3
0
oo
oo
3
3
2
∞
0
∞
1
4
∞
6
2
0
∞
5
∞
2
1
∞
0
d) Vektorform - pfeilsortiert
anf
end
c
alt neu
1
1
5
2
5
3
2
3
2
3
2
5
3
5
4
4
3
2
3
2
1
1
6
2
e1
e2
e4
e7
e6
e8
e3
e5
Pfeilnummernvektor:
end
c
1
1
2
2
3
3
5
5
2
3
5
4
5
4
2
3
3
2
2
6
1
2
3
1
PN
1
2
3
4
5
6
D:\IUT-Strasbourg\doc\graph_iut_d.doc
e1
e2
e3
e4
e5
e6
e7
e8
anf
1
3
5
7
7
9
27.04.2003 19:52
Seite 19 von 39
Speicherbedarf
Speicherform
Anzahl
Speicherelemente
Beispiel
vollständiger
Digraph
n=100
m=n*(n-1)
= 9900
p=1.0
Beispiel
Straßennetz
SL FL
n=800
m=2800
Beispiel
Straßennetz
BW
n=8500
m=25000
p=0.004
p=0.0004
10.000
640.000
72.250.000
29.700
8.400
75.000
19.901
6.401
58.501
Bewertungsmatrix C(D)
n*n
Pfeilorientiert
Anfangsknotenvektor
Endknotenvektor
Bewertungsvektor
pfeilorientiert
pfeilsortiert
Endknotenvektor
Bewertungsvektor
Pfeilnummernvektor
n:
m:
p:
m
m
m
∑=3*m
m
m
n+1
∑=2*m
+n+1
Anzahl Knoten
Anzahl Pfeile
Pfeildichte: m/(n*(n-1))
D:\IUT-Strasbourg\doc\graph_iut_d.doc
SL FL:
BW:
27.04.2003 19:52
Landkreis
Schleswig-Flensburg
Baden-Württemberg
Seite 20 von 39
2. ALGORITHMEN
2.1-a
Bestimmung der Nachfolger eines Knotens i bei vektororientierter
Speicherung eines pfeilsortierten Digraphen D
Aufbau des Pfeilnummernvektors PN:
S1:
für i = 1 .. n führe aus:
setze PN[n+1] := m+1
setze PN[i] := 0
S2:
für alle Pfeile ej in der Reihenfolge j = 1 .. m führe aus:
falls ein neuer Anfangsknoten i auftritt, setze PN[i] := j
S3:
Überprüfung auf Senken (alle Knoten i mit PN[i]=0 sind Senken):
für alle PN[i] in der Reihenfolge i = n .. 1 führe aus:
falls PN[i]=0, setze PN[i] := PN[i+1]
Bestimmung der Nachfolger eines Knoten i:
für
j = PN[i] .. PN[i+1] - 1 führe aus :
der Endknoten des Pfeiles mit Pfeilnummer j ist Nachfolger von i
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 21 von 39
2.1-b
Bestimmung der Vorgänger eines Knotens i bei vektororientierter
Speicherung eines Digraphen D
Benutzung folgender ganzzahliger linearer Felder:
ANF_ZEIGER [1..n]
TEMP
[1..n]
VORGÄNGER [1..m]
Vorbereitungsschritt:
S1:
S2:
alle Datenknoten der Felder ANF_ZEIGER und VORGÄNGER
auf Null setzen
Betrachtung der Endknoten aller Pfeile in der Reihenfolge e1,
e2, ..., em :
Fall 1:
Endknoten i tritt zum ersten Male auf:
sei j die Pfeilnummer des Pfeiles mit Endknoten i ;
setze
ANF_ZEIGER [i] := TEMP [i] := j
Fall 2:
Endknoten i tritt nicht erstmalig auf:
die weiteren Pfeilnummern mit Endknoten i
werden im Feld VORGÄNGER gespeichert;
sei j die Pfeilnummer eines solchen Pfeiles,
setze
VORGÄNGER [TEMP [i] ] := j
TEMP [i] := j
Bestimmung der Vorgänger eines Knotens i:
j := ANF_ZEIGER [i]
solange j <> 0 führe aus :
der Anfangsknoten des Pfeiles mit Pfeilnummer j ist
Vorgänger von i
j := VORGÄNGER [j]
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 22 von 39
2.2-a
Bestimmung eines kürzesten Weges (Länge und Verlauf) von einem
Startknoten a zu allen anderen Knoten in einem bewerteten
Digraphen D = [V,E,c] mit dem Algorithmus von DIJKSTRA
Eingabe:
a:
c[i,j]:
Ausgabe:
kw_dist[i]:
pre[i]:
Startknoten
Bewertung (Länge) des Pfeiles von i nach j
kürzeste Wegelänge von Startknoten a nach i
Vorgänger von i auf dem kürzesten Weg von Startknoten a nach i
Voraussetzung: D darf keine negativen Bewertungen enthalten
S1:
Initialisierung:
Markiere Startknoten a:
sei R die Menge der markierten
Knoten, dann gilt a ∈ R (R={a}).
Setze für Knoten a:
kw_dist[a] := 0,
pre[a] := 0.
Setze für alle anderen Knoten i (∀i ≠a):
kw_dist[i] := ∞,
pre[i] := 0.
S2:
Falls ein oder mehrere Knoten markiert sind (R ≠ ∅):
wähle einen Knoten aus mit MIN kw_dist[j],
j∈R
dieser Knoten sei i;
sonst (R = ∅): ENDE Dijkstra-Algorithmus.
S3:
Für alle Nachfolger j ∈ Si , die noch nicht aus der Markierung
entfernt worden sind, führe aus:
falls kw_dist[i] + c[i,j] < kw_dist[j]:
(1) setze kw_dist[j] := kw_dist[i] + c[i,j],
(2) setze pre[j] := i,
(3) markiere j (j ∈ R).
Entferne die Markierung bei i (i ∉ R).
Gehe zu S2.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 23 von 39
2.2-b
Bestimmung eines kürzesten Weges (Länge und Verlauf) von einem
Startknoten a zu allen anderen Knoten in einem bewerteten
Digraphen D = [V,E,c] mit dem Algorithmus von FORD
Eingabe:
a:
c[i,j]:
Ausgabe:
kw_dist[i]:
pre[i]:
Startknoten
Bewertung (Länge) des Pfeiles von i nach j
kürzeste Wegelänge von Startknoten a nach i
Vorgänger von i auf dem kürzesten Weg von Startknoten a nach i
Voraussetzung: D darf keine negativen Zyklen enthalten
S1:
Initialisierung:
Markiere Startknoten a:
sei R die Menge der markierten
Knoten, dann gilt a ∈ R (R={a}).
Setze für Knoten a:
kw_dist[a] := 0,
pre[a] := 0.
Setze für alle anderen Knoten i (∀i ≠a):
kw_dist[i] := ∞,
pre[i] := 0.
S2:
Falls ein oder mehrere Knoten markiert sind (R ≠ ∅):
wähle den Knoten aus, der am längsten (kürzesten) in R
enthalten ist.
dieser Knoten sei i;
sonst (R = ∅): ENDE Dijkstra-Algorithmus.
S3:
Für alle Nachfolger j ∈ Si führe aus:
falls kw_dist[i] + c[i,j] < kw_dist[j]:
(1) setze kw_dist[j] := kw_dist[i] + c[i,j],
(2) setze pre[j] := i,
(3) markiere j (j ∈ R).
Entferne die Markierung bei i (i ∉ R).
Gehe zu S2.
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 24 von 39
2.2-c
Bestimmung eines kürzesten Weges von jedem Knoten zu allen
anderen Knoten eines bewerteten Digraphen D = [V,E,c], d,h.
Erstellung der Entfernungsmatrix K(D) mit dem TRIPEL-Algorithmus
Eingabe:
C(D):
P(D):
Bewertungsmatrix
Vorgängermatrix
Ausgabe:
K(D):
P(D):
Entfernungsmatrix (entstanden aus C(D))
pij: Vorgänger des Knotens j auf dem
kürzesten Weg von i nach j
Voraussetzung: D darf keine negativen Zyklen enthalten
Schritte 1,...,n:
Berechne im z-ten (z:=1,..,n) Schritt für alle
Elemente cij, die nicht Element der z-ten Zeile,
der z-ten Spalte oder der Hauptdiagonalen sind:
neu
cij
alt alt
alt
: = MIN (cij , ciz + czj )
sowie
neu
pij :=
alt
neu
pzj , falls cij <
alt
cij
alt
pij , sonst
nach n Schritten: ENDE Tripel-Algorithmus
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 25 von 39
2.3
Tourenplanungsverfahren – Saving Algorithmus
Definition:
Eindepot-Tourenplanungsproblem (ETP):
Gegeben:
1) anzufahrende Auftragsknoten i = 1,2,...,n
2) Depot (Start- und Rückkehrknoten einer Tour)
3) Symmetrisches Straßennetz mit räumlichen oder zeitlichen Entfernungen
- zwischen den Auftragsknoten d ij und
- Depotentfernungen der Auftragsknoten dpi
4) Liefer- und Sammelmengen q i
5) Standzeit ti
6) einheitliche Kapazität von Q Transporteinheiten (TE)
7) Maximale Tourenlänge T
Gesucht:
Menge von Touren (Tourenplan) minimaler Gesamtlänge unter Berücksichtigung:
- Kapazität Q
- Maximale Tourenlänge T
- Jeder Auftragsknoten i wird in genau einer Tour angefahren
SAVING-Verfahren (Clarke + Wright 1964)
S1: Einzelanfahrten für alle Aufträge
S2: Berechnung der SAVING-Werte
i
j
dpi
dp j
D
Sij
i d ij
j
dpj
dp i
D
Sij = dpi + dpj - d ij
für alle Auftragsknotenpaare
n * ( n − 1)
Möglichkeiten
2
S3: Absteigende Sortierung der SAVING-Werte
S4: Aufbau der Touren
mit dem größten SAVING-Wert beginnend ...
Lege die Touren, in denen sich i und j befinden durch Verbindung von i und j
zusammen, falls
1.
Kapazität Q eingehalten wird
2.
max. Tourenlänge T eingehalten wird
3.
i und j in unterschiedlichen Touren
4.
i und j „Endknoten“ (erster oder letzter Auftragsknoten)
einer Tour sind
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 26 von 39
Beispiel Savingverfahren
T=∞
Q = 18
6
7
29
5
4
6
22
20
8
5
22
38
38
22
3
7
35
2
9 Menge
1
56
38
42 Länge
D
Entfernungsmatrix (Entfernungstabelle)
1
2
3
1
0
35
22
2
0
57
3
0
4
5
6
D
4
57
22
49
0
5
38
51
20
29
0
6
73
38
71
22
51
0
D
38
42
56
64
76
80
Savingmatrix
1
1
2
3
4
5
6
2
45
D:\IUT-Strasbourg\doc\graph_iut_d.doc
3
72
41
4
45
84
71
27.04.2003 19:52
5
76
67
112
111
6
45
84
65
122
105
Seite 27 von 39
S1:
Ausgangslösung
D-1-D
D-2-D
D-3-D
D-4-D
D-5-D
D-6-D
Summe:
Menge Länge
7
76
9
84
8
112
7
128
6
152
5
160
42
712
S2: Berechnung der SAVING-Werte: Sij = dpi + dpj - d ij
S12 = dp1 + dp2 - d12 = 38 + 42 - 35 = 45
S46 = dp4 + dp6 - d46 = 64 + 80 - 22 = 122
S3: Absteigende Sortierung der Savingwerte
S4: Aufbau der Touren: mit dem größten Savingwert beginnend:
Lege die Touren, in denen sich i und j befinden durch Verbindung von i und j
zusammen, falls
1. Kapazität Q eingehalten wird
2. max. Tourenlänge T eingehalten wird
3. i und j in unterschiedlichen Touren
4. i und j „Endknoten“ einer Tour sind
Saving-Wert bei (4/6) = 122
1.
2.
3.
4.
Q = 18, erfüllt
T = oo , erfüllt
erfüllt
erfüllt
==>
D-1-D
D-2-D
D-3-D
D-4- 6-D
D-5-D
Summe:
Saving-Wert bei (3/5) = 112
D:\IUT-Strasbourg\doc\graph_iut_d.doc
1.
2.
3.
4.
Menge Länge
7
76
9
84
8
112
12
166
6
152
42
590
Q erfüllt
T erfüllt
erfüllt
erfüllt
27.04.2003 19:52
Seite 28 von 39
==>
Menge Länge
D-1-D
7
76
D-2-D
9
84
D-3- 5-D
14
152
D-4- 6-D
12
166
Summe:
42
478
Saving-Wert bei (4/5) = 111
1.
Q nicht erfüllt
Saving-Wert bei (5/6) = 105
1.
Q nicht erfüllt
...
...
Saving-Wert bei (1/2) = 45
1.
2.
3.
4.
Q erfüllt
T erfüllt
erfüllt
erfüllt
==>
D-1- 2-D
D-3- 5-D
D-4- 6-D
Summe:
Menge Länge
16
115
14
152
12
166
433
42
Für Q = 22
Saving-Wert bei (4/6) = 122
1.
2.
3.
4.
Q erfüllt
T erfüllt
erfüllt
erfüllt
==>
D-1-D
D-2-D
D-3-D
D-4- 6-D
D-5-D
Summe:
Saving-Wert bei (3/5) = 112
D:\IUT-Strasbourg\doc\graph_iut_d.doc
1.
2.
3.
4.
Menge Länge
7
76
9
84
8
112
12
166
6
152
42
590
Q erfüllt
T erfüllt
erfüllt
erfüllt
27.04.2003 19:52
Seite 29 von 39
==>
D-1-D
D-2-D
D-3- 5-D
D-4- 6-D
Summe:
Menge Länge
7
76
9
84
14
152
12
166
42
478
Saving-Wert bei (4/5) = 111
1.
Q nicht erfüllt
Saving-Wert bei (5/6) = 105
1.
Q nicht erfüllt
1.
2.
3.
4.
Q erfüllt
T erfüllt
erfüllt
erfüllt
...
Saving-Wert bei (2/4) = 84
...
==>
D-1-D
D-2- 4-6D
D-3- 5-D
Summe:
Saving-Wert bei (1/5) = 76
1.
2.
3.
4.
Menge Länge
7
76
21
166
14
42
152
394
Q erfüllt
T erfüllt
erfüllt
erfüllt
==>
D-3- 5-1-D
D-2- 4-6-D
Summe:
D:\IUT-Strasbourg\doc\graph_iut_d.doc
Menge Länge
21
152
21
166
318
42
27.04.2003 19:52
Seite 30 von 39
Darstellung von Verkehrsknoten mit Fahrtrichtungsvorschriften:
Straßenkreuzung
2
als Digraph
2
2
3
2
5
2
1
4
3
5
3
5
3
2
4
2
3
2
2
4
Kreuzung + 1 Schild
2
Einführung von 5A , (geographisch
identisch mit 5)
2
2
3
2
2
5
4
1
5A
5
0
3
3
5
4
3
2
3
2
2
2
4
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 31 von 39
Übung
P 3.1
Gegeben ist ein bewerteter Digraph D3_1a = [V,E,c] mit V = {1,2,...,7}
und E = {e1,e2,...,e12}
(siehe Datei d3_1a.net ):
2
e1
2
1
7
4
e2
1
e4
3
2
e6
1
4
e10
2
7
e7
3
e5
e3
6
e11
5
e8
1
1
3
e9
e12
7
Erstellen Sie ein PASCAL-Programm:
a) Speichern Sie den Digraphen D3_1a in einer Bewertungsmatrix C(D)
und geben Sie die Bewertungsmatrix C(D) aus.
b) Speichern Sie den Digraphen D3_1a in Vektorform (pfeilsortiert)
und geben Sie die einzelnen Vektoren aus.
c) Bestimmen Sie die Nachfolger z.B. der Knoten 1,6,7 in beiden Speicherungsformen.
d) Bestimmen Sie die Vorgänger z.B. der Knoten 1,3,5 in beiden Speicherungsformen.
e) Führen Sie die Aufgaben a) - d) ebenfalls für den folgenden Digraphen D3_1b durch (siehe Datei d3_1b.net)
4
1
2 e2
3
2
D:\IUT-Strasbourg\doc\graph_iut_d.doc
1
e1
3 e3
4
e4
5
27.04.2003 19:52
Seite 32 von 39
Anmerkungen:
1) Verwenden Sie auch zukünftig folgende Konstanten, Datentypen
und Variablen:
const
nmax
nmax_plus_1
nmax_matrix
mmax
unendlich
type
matrix
=
knotenfeld
knoten_plus_1_feld
pfeilfeld
stringfeld
=
=
=
=
var n
:
Graphen}
m
:
c
:
anfknoten :
endknoten :
cbewertung:
pn
:
anf_zeiger :
temp
:
vorgaenger :
datei_name:
ort
:
=
=
=
=
=
word;
380;
381;
140;
1500;
15000;
array
[1..nmax_matrix,1..nmax_matrix]
of word;
array [1..nmax] of word;
array[1..nmax_plus_1] of word;
array [1..mmax] of word;
array [1..nmax] of string[30];
{Anzahl Knoten des aktuellen
word;
{Anzahl Pfeile des aktuellen Graphen}
matrix;
{Bewertungsmatrix}
pfeilfeld; {Anfangsknotennummernvektor}
pfeilfeld; {Endknotennummernvektor}
pfeilfeld; {Bewertungsvektor}
knoten_plus_1_feld; {Pfeilnummernvektor}
knotenfeld;{siehe Algorithmus 2.1b}
knotenfeld;{siehe Algorithmus 2.1b}
pfeilfeld; {siehe Algorithmus 2.1b}
string;
stringfeld; {Ortsnamenvektor}
2)
Verwenden Sie zum Einlesen der Digraphen die Einleseprozedur
READNETDATEI (datei_name, anfknoten, endknoten, cbewertung,
n, m) zum Lesen der *.net-Dateien (siehe Programmdatei
readnet.inc).
3)
Verwenden Sie zur Pfeilsortierung der Digraphen die Sortierprozedur QUICKERSORT (anfknoten, endknoten, cbewertung, 1,m)
(siehe Programmdatei qsort3.inc).
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 33 von 39
Übung 3.2
Implementierung des Dijkstra-Algorithmus
a) auf der Basis der Bewertungsmatrix C(D)
b) auf der Basis der pfeilorientierten Speicherung
Benutzen Sie den Digraphen D3_1a und die folgenden Straßennetze zum
Testen:
Region Bad Dürkheim (dh.net)
n=69
m=226
Region Cleebourg (elsass_n.net)
n=101
m=322
Deutschland (brd.net)
n=584
m=2218
Baden Württemberg (bw.net)
n=8494
m=24844
Benutzen Sie zum Einlesen der Knotennamen die Prozedur
READKDNDATEI (datei_name, ort, n) (siehe readkdn.inc)
Übung 3.3
Implementierung des Ford-Algorithmus
a)
auf der Basis der Bewertungsmatrix C(D)
b)
auf der Basis der pfeilorientierten Speicherung
Testdaten wie Übung 3.2
Übung 3.4
Implementierung des Tripel-Algorithmus
Benutze als Testdaten
D:\IUT-Strasbourg\doc\graph_iut_d.doc
D3_1a.net
dh.net
elsass_n.net
27.04.2003 19:52
Seite 34 von 39
Projekt 3.5
Erstellen Sie ein Pascal-Programm zur Ermittlung eines Tourenplanes
für das Ein-Depot-Tourenplanungsproblem unter Benutzung des
Savingverfahrens.
Straßennetz:
n Knoten
Auftragsknoten:
Knoten 1,...,n-1
Depotknoten:
Knoten n
Anmerkungen:
1)
Verwenden Sie folgende Konstanten, Typen und Variablen:
const
nmax
=
nmax_plus_1=
mmax
=
svmax
=
unendlich =
140;
141;
500;
9730; (* svmax:=nmax*(nmax-1)/2 *)
15000;
type
knotenfeld
knoten_plus_1_feld
pfeilfeld
stringfeld
svfeld
indexfeld
index
var
n
m
anzKunden
anzKnotenpaare
:
:
:
:
anzTouren
anzKundenTour
depot
anfknoten
endknoten
cbewertung
pn
dist
:
:
:
:
:
:
:
:
pre
:
sv
:
D:\IUT-Strasbourg\doc\graph_iut_d.doc
=
=
=
=
=
=
=
array[1..nmax] of word;
array[1..nmax_plus_1] of word;
array[1..mmax] of word;
array[1..nmax] of string[25];
array[1..svmax] of integer;
array[1..svmax] of byte;
word;
word;
word;
word;
word;
(* Anzahl Knoten des aktuellen Graphen *)
(* Anzahl Pfeile des aktuellen Graphen *)
(* Anzahl anzufahrender Knoten = n-1
*)
(* Anzahl moeglicher Knotenpaare (nur *)
(* Kndenknoten) = anzKunden*(ankunden *)
(* -1)/2
*)
word; (* Anzahl der Touren
*)
word; (* Anzahl Kunden in der aktuellen Tour *)
word; (* Depotknoten = n
*)
pfeilfeld;
(* Anfangsknotenvektor
*)
pfeilfeld;
(* Endknotenvektor
*)
pfeilfeld;
(* Bewertungsvektor
*)
knoten_plus_1_feld; (* Pfeilnummernvektor
*)
knotenfeld;
(* dist(i) enthaelt die Laenge des kuerzesten
Weges vom Starknoten a zu Knoten i
*)
knotenfeld;
(* pre(i) enthaelt den Vorgaenger von Knoten i
auf dem kuerzesten Weg von Startknoten a
nach i
*)
svfeld;
(* untere Dreiecksmatrix der Savingmatrix ohne
Haupdiagonale - zeilenweise
*)
27.04.2003 19:52
Seite 35 von 39
dp
: knotenfeld;
(* dp(i) enthaelt die kuerzeste Entfernung vom
Depot zum Knoten i
*)
menge
: knotenfeld;
(* menge(i) enthaelt die beim Kundenknoten i
auszuliefernde bzw. einzusammelnde Menge
*)
standzeit
: knotenfeld;
(* standzeit(i) enthaelt die beim Kundenknoten i
zur Auslieferung bzw. zur Einsammlung benoetigte Aufenthaltszeit
*)
z
: knotenfeld;
(* z(i) enthaelt die Tournummer, in der Knoten
i liegt
*)
r
: array[1..nmax,1..2] of byte;
(* r(i,j) : Knoten i liegt in der Tour z(i)
zwischen den Knoten r(i,1) und r(i,2);
r(i,j)=0 entspricht dabei dem Depot
*)
kapazitaet
: word;
max_Tourenlaenge: word;
iindex, jindex : indexfeld;
(* iindex(i), jindex(i) enthalten die Knoten,
die zum Savingwert sv(i) gehoeren
*)
ort
: stringfeld;
(* ort(i) enthaelt den Ortsnamen des Knotens i )
gesamtmenge
: word;
gesamtzeit
: word;
x
: real;
datei_name
: string;
2.
Verwenden Sie zum Einlesen der Straßennetze die Prozedur
READNETDATEI
(datei_name, anfknoten, endknoten,
cbewertung, n, m)
(siehe readnet.inc)
Dateien: p4_8.net(Vorlesungsbeispiel), angeln1.net, dh1.net,
dh2.net
3.
Verwenden Sie zum Einlesen der Auftragsdaten die Prozedur
READKDNDATEI
(datei_name,menge,standzeit,ort,n)
(siehe readkdns.inc)
Dateien: p4_8.kdn, angeln1.kdn, dh1.kdn, dh2.kdn
4.
Verwenden Sie zum Sortieren der Savingwerte die Prozedur
QUICKERSORT_SV(sv,iindex,jindex,1,anzKnotenpaare)
(siehe qsort3sv.inc)
Beachten Sie, daß QUICKERSORT_SV aufsteigend sortiert !
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 36 von 39
ANHANG Borland Pascal 7.0
Programmaufbau
Programmkopf
Deklarationsteil
(Vereinbarungsteil)
CONST, VAR-> Reservierung
von entsprechendem
Speicherplatz im Hauptspeicher
Programmkörper
(Anweisungsteil)
PROGRAM
<Name> ;
[USES
<Name> ;]
[CONST <Name > = <Wert> ;]
[TYPE
<Name> ;]
[VAR
<Name> : <Datentyp>;]
[PROCEDURE ... ;]
[FUNCTION ... ;]
BEGIN
Anweisung 1 ;
...
Anweisung n ;
END.
Regeln für Namen (Bezeichner):
1.
gültige Zeichen: A,...,Z, a,...,z (keine Umlaute, kein ‘ß’)
0,...,9
Sonderzeichen nur ‘_’
2.
1. Zeichen muß Buchstabe sein
3.
Zeichen 1-63 signifikant (alle weiteren Zeichen werden ignoriert)
Beispielprogramm:
PROGRAM Mein_erstes_Pascal_Programm;
VAR a, b :
INTEGER;
BEGIN
WRITE(‘A, B eingeben (A, B ganzzahlig): ‘);
READLN (a,b);
{Eingabe}
a := a + b;
{Berechnung}
WRITELN (‘A = ‘,a:5);
{Ausgabe}
END.
Erläuterungen:
VAR ...
WRITE(...);
READLN(...);
a:= a+b;
WRITELN(...);
;
Speicherplatzreservierung im Hauptspeicher
Ausgabe Bildschirm (Text in ‘...’)
Eingabe über Tastatur
:= ist Zuweisungsoperator (kein ‘ist gleich’ !!!)
wie WRITE, jedoch mit Zeilenvorschub nach Ausgabe
Begrenzer
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 37 von 39
Datentypen
A)
Ganze Zahlen (z.B. 3, -10, 678)
INTEGER
Speicherbedarf: 2 Byte
Wertebereich: - 32 768,..., + 32 767
LONGINT
Speicherbedarf: 4 Byte
Wertebereich: - 2 147 483 648,..., + 2 147 483 647
BYTE
Speicherbedarf: 1 Byte
Wertebereich: 0,.., + 255
SHORTINT
Speicherbedarf: 1 Byte
Wertebereich: -128,..., +127
WORD
Speicherbedarf 2 Byte
Wertebereich: 0,..., + 65 535
B) Reelle Zahlen (z.B. 1.27 0.5678)
REAL
Speicherbedarf: 6 Byte
Wertebereich: ±1.7*1038,...,±2.9*10 -39
Genauigkeit:
11-12 Stellen
C)
Zeichenketten (Strings) (z.B. ‘Guten Morgen’, ‘A107’, ‘24beta’)
CHAR
Speicherbedarf: 1 Byte
Zeichenbereich: ASCII-Zeichen
Zeichenanzahl: 1
STRING
Speicherbedarf: 256 Byte
Zeichenbereich: ASCII-Zeichen
Zeichenanzahl: 255
STRING[n]
Speicherbedarf: (n+1) Byte
Zeichenbereich: ASCII-Zeichen
Zeichenanzahl: n
D) Boolean (Wahrheitswerte)
BOOLEAN
Speicherbedarf: 1 Byte
Wertebereich: true, false
D:\IUT-Strasbourg\doc\graph_iut_d.doc
27.04.2003 19:52
Seite 38 von 39
OPERATOREN
Arithmetische Operatoren
Operation
Operator Operation
Addition
+
Subtraktion
-
a+b
m+n
a-b
m-n
a*b
m*n
a/b (b≠0)
m/n
(n≠0)
m DIV n
Multiplikation *
Division
/
IntegerDivision
Modulo
DIV
a+b
m+n
a-b
m-n
a*b
m*n
a/b
m/n
Datentyp
Ergebnis
REAL
INTEGER
REAL
INTEGER
REAL
INTEGER
REAL
REAL
4 DIV 3 -> 1
INTEGER
11 DIV 2 -> 5
m MOD n m-(m DIV n)*n INTEGER
10 MOD 3 -> 1
m,n: INTEGER
MOD
a,b: REAL
Vergleichs- und logische Operatoren
Operation
Operator
Gleich
=
Ungleich
<>
Größer
>
Kleiner
<
größer gleich
>=
kleiner gleich
<=
Oder
OR
Und
AND
Verneinung
NOT
a, b : INTEGER;
a := 5; b := 10;
D:\IUT-Strasbourg\doc\graph_iut_d.doc
Wert
Beispiel
Ergebnis
a=b
false
a <> b
true
a>b
false
a<b
true
a >= b
false
a <= b
true
u OR u
true
u OR v
true
v OR u
true
v OR v
false
u AND u
true
u AND v
false
v AND u
false
v AND v
false
NOT u
false
NOT v
true
u, v : BOOLEAN;
u := true; v := false;
27.04.2003 19:52
Seite 39 von 39