Motor - Projektlabor
Werbung

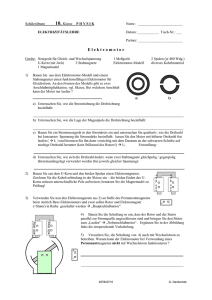
Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Motor Ein Motor (von lat. movēre, mōvī, mōtum: bewegen) ist eine Kraftmaschine die zum Bewegen und Antreiben von mechanischen Geräten Verwendung findet. Er wandelt Energieformen wie thermische oder elektrische Energie in mechanische Energie bzw. Arbeit um. Die Spezifikation von Motoren sollte mindestens die Leistung (Eingangs- oder Ausgangsleistung) und den Wirkungsgrad beinhalten. Arten Druckluftmotor Freikolbenmotor Hydraulikmotor Wankelmotor Nanomotor Stirlingmotor Wasserkraftmaschine Vakuummotor Dieselmotor Ottomotor Scheibenläufermotor Elektromotor Erfinder Als Erfinder des Elektromotors gilt Johann Kravogl, wobei auch der Physiker Ányos Jedlik eine Urform des Elektromotors konstruierte. Der Erfinder des Wechselstrommotors heißt Nikola Tesla. Quellen www.google.de 1 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Nikola Tesla Personendaten NAME TESLA, NIKOLA ALTERNATIVNAMEN KURZBESCHREIBUNG Erfinder und Elektro-Ingenieur GEBURTSDATUM 10. Juli 1856 GEBURTSORT Smiljan, Kroatien (seinerzeit Bestandteil von Österreich-Ungarn) STERBEDATUM 7. Januar 1943 STERBEORT New York Quellen www.google.de 2 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Johann Kravogl Personendaten NAME KRAVOGL, JOHANN ALTERNATIVNAMEN KURZBESCHREIBUNG Büchsenmacher und Mechaniker GEBURTSDATUM 24. Mai 1823 GEBURTSORT Lana (Südtirol) STERBEDATUM 1. Januar 1889 STERBEORT Brixen (Südtirol) Quellen www.google.de 3 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Elektromotor Ein Elektromotor ist eine elektrische Maschine, die mit Hilfe von magnetischen Feldern elektrische in mechanische Arbeit umwandelt, indem sie eine Kraft und damit auch eine Bewegung erzeugen kann. Der Wirkungsgrad liegt zwischen 0,6 und 0,98. Auf dem "Anker" ist eine Spule aufgewickelt, durch die Strom fließt. Durch das umgebende Magnetfeld entsteht eine Lorentzkraft, die den Anker, der mit der Achse fest verbunden ist, rotieren lässt. Auf diese Weise kann elektrische Energie in Bewegungsenergie gewandelt werden. Zur Stromübertragung auf die beweglichen Spulen werden sog. Bürsten eingesetzt: Zur Übertragung auf den sog. Kollektor (bei Gleich und- Wechselstrommotoren) Bei Drehstrommotoren übertragen die Bürsten Ströme auf Schleifringe. Gleichstrommaschine Unter einer Gleichstrommaschine versteht man einen Elektromotor, der mit Gleichstrom betrieben wird oder einen Generator, der umgekehrt mechanische Energie in Gleichstrom wandelt. Sie besteht aus einem unbeweglichen äußeren Teil, dem Stator, und einem drehbar gelagerten inneren Teil, dem Rotor. Bei konventionellen Gleichstrommaschinen besteht der Stator aus einem Elektromagneten oder bei kleineren Maschinen einem Permanentmagneten. Der Rotor wird bei konventionellen Maschinen Anker genannt, es handelt sich um einen Elektromagneten. Zu den Vorteilen der Gleichstrommaschinen gehören gutes Anlaufverhalten und gute Regelbarkeit. Quellen www.google.de 4 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Aufbau Reihenschlussmaschine Hier sind Erregerwicklung und Ankerwicklung in Reihe geschaltet. Dadurch wechseln Erregerfeld und Ankerstrom ihre Richtung synchron, so dass eine Speisung mit Wechselstrom möglich wird. Solche Maschinen wurden als Bahnantriebe in Wechselstromnetzen eingesetzt. Unter dem Begriff Universalmaschine oder Allstrommotor werden die Antriebe von Haushaltsmaschinen, Bohrmaschinen etc zusammengefasst. Quellen www.google.de 5 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Nebenschlussmaschine Bei der Nebenschlussmaschine sind Erreger- und Ankerwicklung parallel geschaltet. Ein Wechselspannungsbetrieb ist nicht üblich. Quellen www.google.de 6 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Ansteuerung DC- Motor Die H-Brücke als Richtungsgeber für den Motor Motor FF 12V (PWM) REW 12V (PWM) BESCHREIBUNG und AUFBAU Die H- Brücke hat ihren Namen durch den Aufbau und ist wichtig als Richtungsgeber für den DC- Motor. In der Mitte der Schaltung wird der Motor angeschlossen- hier mit einem Widerstand dargestellt. Da ein DC- Motor gleichzeitig Generator ist soll durch die Dioden der Rücklaufstrom aufgehalten werden. Abhängig davon ob im Transistor Q5 oder im Transistor Q6 ein Basisstrom impliziert wird, werden jeweils Transistor Q1 und Q4 angesteuert oder die Transistoren Q2 und Q3. D.h. der Motor dreht sich linksrum oder rechtsrum. Wollen wir uns angucken was passieren muss damit sich der Motor z.B. rechtsrum dreht. D.h. in den Transistor Q5 wird ein Basisstrom impliziert. Der Basisstrom vom Q2N2222 sollte bei 10mA liegen, denn hier wird die höchste Wirkleistung erzielt .Wenn wir nun den Q2N2222 mit 12V ansteuern wollen dann müssen wir ein 1.2kOhm Widerstand vorschalten weil R=U/I nach dem Ohmeschen Gesetz ist. Ein 1k Widerstand tut es hier auch. Wird die Basis vom Q5 mit Strom durchflossen wird ein Kollektorstrom aus der Betriebsspannungsquelle gezogen. Hier ist aber noch der Q1 im Weg der durch die Ansteuerung von Q5 ebenfalls angesteuert wird. Es ist zu beachten das Q1 ein PNPTransistor ist und Q5 ein NPN- Transistor ist. Die Pfeile auf den Transistoren markieren den Emitter. Durch den Motor fließt also der Kollektorstrom vom Q1 und fließt über Q4 zur Masse. Der Transistor Q4 wird mit dem Emitterstrom vom Q5 aktiviert. Die Transistoren Arbeiten hier als Schalter da der Basisstrom ein Gleichstrom ist und kein Wechselsignal. Quellen www.google.de 7 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 MASCHE Wenn wir nun einen 10 Ohm Motor benutzen, die H- Brücke mit 12V betreiben und davon ausgehen das an den Transistoren ein Kollektor- Emitterspannung von 1.1 Volt abfallen kommen beim Motor 9.8 Volt an, was man unten an den Ausgangssignalen gut erkennen kann. Das blaue Signal zeigt das Potential an der Basis von Q5. Ausgangssignale V Steuer V DC Motorkreis V Motor OHMSCHES GESETZ Bei 10 Ohm für R5 welcher denn Motor darstellt und einer Betriebsspannung von 12 Volt fließt hier ein Strom von 1 Amper. Das ist schon fast zu viel. Um den Motorstrom zu verringern müsste man mit einer geringeren Betriebsspannung arbeiten oder den Motorwiderstand erhöhen. Quellen www.google.de 8 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 PWM (Pulse Width Modulation) Geschwindigkeitssteuerung der Motoren Schmitt Trigger Integrator Komparator BESCHREIBUNG und AUFBAU Für die Geschwindigkeitsregelung des Motors benötigen wir ein Pulsweiten moduliertes Signal. D.h. der Motor wird langsamer ohne dass die Wirkleistung verringert wird. Wir verwenden hierfür drei OPV`s. Der erste OPV wird mit einem Mitkopplung als SchmittTrigger geschaltet und wandelt die Gleichspannung mit der er betrieben wird in ein Rechtecksignal um. Das Rechtecksignal wird im 2. OPV impliziert. Dieser wird mit einem Kondensator gegengekoppelt und wird als Integrator betrieben. Der Integrator macht aus dem Rechtecksignal ein Sägezahnsignal welches in den 3. OPV impliziert wird. Der 3. OPV arbeitet als Komparator. Abhängig von der Spannung V4 erzeugt der Komparator das PWMSignal, was man unten am Ausgangssignaldiagramm sehr schön erkennen kann. Quellen www.google.de 9 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Entstehung einer Pulsweitenmodulation V DC Steuer V Rechteck Schmitt V Dreieck Integrator PWM out Das Messdiagramm zeigt die Ausgangssignale der drei OPV`s. Das grüne Ausgangssignal liegt am Ausgang vom 1. OPV, dem Schmitt- Trigger und ist ein Rechtecksignal. Das blaue Ausgangssignal liegt am Ausgang vom 2. OPV, dem Integrator und ist ein Sägezahnsignal. Das rote Ausgangssignal liegt am Ausgang vom 3. OPV, dem Komparator und ist unser gewünschtes Signal, das PWM- Signal. Das gelbe Signal ist die Spannung V4 und beeinflusst die Breite vom PWM- Signal indem es die Sägezahnspannung in einer gewissen Höhe abschneidet. Die Höhe, und somit die Pulsweite, hängen wiederum von der Spannung V4 ab. Quellen www.google.de 10 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Beispielschaltung Logik (Hirn Input) 1/0 enable/disable 1/0 in Richtung kippen Versorgungspannungen 5V + GND 12V + GND PWM Geschwindigkeitssteuerung Motor NE555N Timer Verzögerungsglied L298 H-Brücke Beschreibung und Aufbau Hier sehen wir die Schaltung für die Ansteuerung des Motors der die Jalousie von unserem intelligenten Fenster kippen soll. Die H- Brücke und der PW Modulator erscheinen hier als IC`s. Auf den inneren Aufbau der IC´s kommen wir später. Fangen wir links an. Der IC NE555N liefert das PWM- Signal und geht auf Enabel A vom IC L298. Wie man aber oben erkennen kann liegt hier ein AND-Gatter zwischen den PIN Q vom NE555N und dem PIN Enabel A vom L298. Diese AND- Gatter erlaubt dem PWM- Signal den L298 nur dann anzusteuern, wenn es das HIRN sagt. D.h. der Motor zum kippen der Jalousie arbeitet erst dann wenn am AND- Gatter zwei High- Signale liegen. Das HIRN bestimmt auch die Richtung vom Motor. Das Digitalsignal zur Richtungsbestimmung kommt auf Input 1 oder Input 2. Kommt ein Highsignal auf Input 1 des L298 dreht sich der Motor linksrum. Er dreht sich rechtsrum wenn ein Highsignal auf Input 2 liegt. Der Inverter den wir oben sehen vermeidet dass auf Input 1-2 gleichzeitig ein Highsignal liegt, den das würde unseren teuren IC nicht gut tun. Die Transistoren arbeiten als Schalter. Transistoren schalten schneller ein als Sie abschalten. Deswegen mussten wir noch Verzögerungsglieder einbauen. Diese Verzögern die Anschaltzeit der jeweils angesteuerten Transistoren und vermeiden das unsere Transistoren im IC übersteuert werden. Die Verzögerungszeit wird durch ein Widerstand und ein Kondensator berechnet. Verzögerungszeit T = C*R Quellen www.google.de 11 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Innenaufbau L298 Der IC L298 Besteht aus zwei H- Brücken. Abhängig davon ob auf Enabel A oder Enabel B ein Highsignal liegt wird die jeweilige H- Brücke aktiviert. Input 1 und 2 sowie Output 1 und 2 gehören zu Enabel A. Die anderen PIN`s gehören zu Enabel B. Der L298 benötigt zwei Spannungsversorgungen. Eine für die Logik und eine für den Motor. Auf PIN 9 kommen also 5V und auf PIN 4 kommen 12V. Da wir zwei verschiedene Versorgungsspannungen benutzen brauchen wir auch zwei getrennte Massen. Auf PIN 1 und 15 kommt die 12V Masse. Auf PIN 8 kommt die 5V Masse. Die 100nF Kondensatoren greifen Störsignale ab. Quellen www.google.de 12 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Innenaufbau NE555N Beschaltung NE 555N Der NE555N wird wie in Fig. 5 dargestellt geschaltet und liefert ein PWM- Signal. Quellen www.google.de 13 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Schrittmotor Ein Schrittmotor ist ein Gleichstrommotor, bei dem der Rotor bei geschickter Wahl der angesteuerten Statorspulen gezielt um einen Winkel gedreht werden kann. Auf diese Weise kann man in mehreren Schritten jeden Drehwinkel, wenn er ein Vielfaches des minimalen Drehwinkels ist, anfahren. Man unterscheidet den Schrittmotor nach seiner Bauform in Reluktanz- und Permanentmagnetmotor, wobei man beide Formen auch zu einem Hybridschrittmotor kombinieren kann. Beim Permanentmagnetschrittmotor besteht der Stator aus Weicheisen und der Rotor aus Dauermagneten, die abwechselnd einen Nord- und einen Südpol aufweisen. Mit dem StatorMagnetfeld richtet man den dauermagnetischen Rotor so aus, dass eine Drehbewegung entsteht. Typische Anwendungsgebiete sind Drucker, vor allem Matrixdrucker, oder der Antrieb des Schreib/Lesekopfes in einem Diskettenlaufwerk. Da Schrittmotoren (solange sie nicht überlastet werden) exakt dem außen angelegten Feld folgen, können sie ohne Sensoren zur Positionsrückmeldung (Encoder, Drehgeber oder ähnliches) betrieben werden (Synchronmotorverhalten). Daher können sie im Gegensatz zu Servomotoren gesteuert betrieben werden. Servos müssen auf Position geregelt werden. Schrittmotoren existieren auch in Form von Linearmotoren. Schrittmotoren können bis ca. 1 kW wirtschaftlich eingesetzt werden. Quellen www.google.de 14 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Ansteuerung Schrittmotor Der L297 liefert dem Schrittmotor die nötigen Signale und lässt ihn drehen. Mit dem L297 kann man den Schrittmotor im Halbschrittmodus oder im Full- Step- Modus betreiben. Der IC wird mit 5V versorgt und wird mit einem PWM Signal am PIN Clock angesteuert. Quellen www.google.de 15 www.wikipedia.de www.datenblattarchiv.de Referat zum Elektromotor ProLab SS 2005 Denis Nikolic TU-Berlin Berlin den 29. 06. 05 Ausgangssignal L297 Quellen www.google.de 16 www.wikipedia.de www.datenblattarchiv.de