Allgemeiner Teil
Werbung

Labor
III/3 Digitaler Regler
13.03.2007
Allgemeiner Teil
Titel der Übung:
Übungsnummer:
Übungsplatz:
Datum der Übung:
Klasse:
Schriftführer:
Übungsteilnehmer:
Digitaler Regler
III/3
6
13.03.2007
5BHELI
Andreas HAGER
HAGER Andreas
REIM Erich
ANTONY Andreas
SCHNEIDER Bernhard
Inhaltsverzeichnis:
Allgemeiner Teil
Inhaltsverzeichnis
1) Aufnahme der R-T-Kennlinie
2) Linearisierung der Kennlinie
4) Aufbau des Stellers
5) Programmentwurf im B & R Studio
6) Erkenntnisse aus der Übung
1
1
2-3
3-4
4
4-6
6
Anhang:
Inventarliste
2 Seiten Messprotokoll
TI HTBL-Hollabrunn
Andreas HAGER 5BHELI
D:\481346406.doc
1/6
Labor
III/3 Digitaler Regler
13.03.2007
1) Aufnahme der R-δ-Kennlinie:
Bevor wir die Kennlinie aufnehmen konnten, mussten wir aus der max.
Verlustleistung und dem Widerstand, die anzulegende Spannung berechnen.
P=4W entspricht ungefähr 120°C
R=82Ω
2
P
U
U
R
P R
4W 82
18.11V const
Die Spannungsquelle wird auf 18,11V gelegt, der Widerstand wird auf 0°C mit einem
Kältespray abgekühlt und die Erwärmung beim Einschalten der Spannungsquelle
gemessen.
Messschaltung:
P2
A
Igemessen=210mA
PReal=Igem∙Ueing=3,80W
+
RNTC
G1
Ω
P1
P3 δ
Messtabelle:
Zeit t in sec
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
TI HTBL-Hollabrunn
Temperatur δ in °C
Rδ in Ω
-1
0
5
12
18
24
31
38
44
48
53
58
63
67
71
74
78
81
84
87
89
92
94
96
98
100
102
470k
350k
230k
120k
90k
60k
44k
33k
24k
19k
15k
11,5k
9,7k
8,5k
6,9k
6,3k
5,6k
5k
4,5k
4,2k
3,9k
3,6k
3,3k
3,15k
3.05k
2,97k
2,87k
Andreas HAGER 5BHELI
D:\481346406.doc
Besonderheiten
δU
δM
δO
2/6
Labor
III/3 Digitaler Regler
13.03.2007
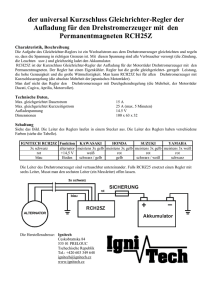
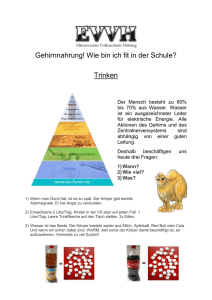
Kennlinie:
T/°C
R-T-Kennlinie
110
100
90
80
70
60
50
40
30
20
10
0
0
100
200
300
400
500
R/kOhm
2. Linearisierung der Kennlinie:
Es wurde in einem Bereich von 18°-89°C linearisiert. Daraus ergeben sich folgende
Werte:
RTu=90kΩ
RTo=3,9kΩ
RTm=9,7kΩ
Rs
RTu RTm RTm RTu 2 RTo RTu
RTo RTu 2 RTm
7.9k
gewählt: 8,2kΩ
Schaltung:
+
RS
Igemessen=208mA
RNTC
UA
δ
TI HTBL-Hollabrunn
Andreas HAGER 5BHELI
D:\481346406.doc
3/6
Labor
III/3 Digitaler Regler
13.03.2007
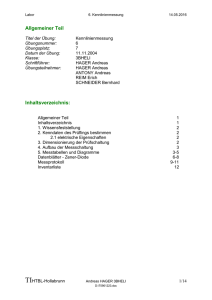
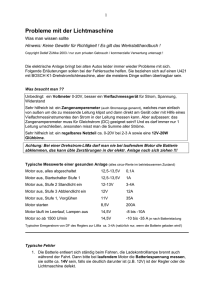
Messtabelle:
T/°C
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
90
80
Temperatur T/°C
URs/V
0,825
1,05
1,3
1,7
2
2,45
2,95
3,45
3,9
4,4
4,8
5,2
5,6
6
6,3
70
60
50
40
30
20
0
1
2
3
4
5
6
Spannung Urs/V
Erkenntnis: Unserer Linearisierung (Berechnung) war richtig.
3. Aufbau des Stellers:
Wenn das Potentiometer auf Stellung 0 ist, ist die Spannung am Widerstand 0V. Bei
voll aufgedrehtem Poti wird die Spannung am Widerstand.
Zum Messen (Kontrollieren) der Spannung muss auf dem Messgerät AC+DC-Betrieb
ausgewählt sein, da es sonst Probleme mit der Abtastfrequenzgibt.
4) Programmentwurf im B&R Automation Studio:
Zuerst muss bei der Verbindungsart auf Serielle Verbindung umgestellt werden. Dies
geschieht folgendermaßen: Extras Optionen Verbindung Seriell
Als nächstes müssen Gleichungen aufgestellt werden, damit die Spannung am
Eingang auf bestimmte Werte umgerechnet werden:
1. Gleichung:
y=k∙x+d
∆x=70°
∆y=5,47 => k=0,078
d=6,3-0,078∙90=-0,72
=> y1=0,078∙x-0,72
TI HTBL-Hollabrunn
Andreas HAGER 5BHELI
D:\481346406.doc
4/6
Labor
III/3 Digitaler Regler
13.03.2007
2. Gleichung:
k=0,143
d=10-0,143*90=-2,86
w=0,143∙x-2,86
x=0,143∙Tist-2,86
x=TSoll
Source Code:
Folgender Source-Code wurde geschrieben, der den Regler beschreibt.
/* Include der C-Erweiterungen für Automatisierungsfunktionen */
#include <bur/plc.h>
#include <bur/plctypes.h>
/* Deklaration der lokalen Variablen
*/
/* Deklaration der globalen Variablen
_GLOBAL INT ai1, ai3, ao3;
_GLOBAL REAL Tu, dT, Tsoll, Tist, W, X;
_GLOBAL REAL un, un1, en, en1;
void _INIT ObjectInit( void )
{
/* Init-Subroutine
Tu = 20.0;
dT = 70.0;
un = 0.0;
un1 = 0.0;
en = 0.0;
en1 = 0.0;
}
*/
*/
void _CYCLIC ObjectCycle( void )
{
/* Zyklischer Teil des C-Objektes
*/
Tist = ((ai3/3276.7) + 0.72) / 0.078;
Tsoll = (ai1/32767.0)*dT + Tu;
W = (0.143*Tsoll) - 2.86;
X = (0.143*Tist) - 2.86;
en1 = en;
en = W - X;
un1 = un;
un = un1 + (0.01/30.0) * en;
TI HTBL-Hollabrunn
Andreas HAGER 5BHELI
D:\481346406.doc
5/6
Labor
III/3 Digitaler Regler
13.03.2007
if (un>10.0)
un = 10.0;
if (un<0.0)
un = 0.0;
ao3 = un * 3276.7;
}
Variablenzuweisung:
Folgende Variablen mussten zugewiesen werden, da die Eingänge und Ausgänge ja
abgefragt werden mussten, und im Programm berechnet wurden. Das berechnete
Ergebnis wird dann auf den analogen Ausgang weitergegeben.
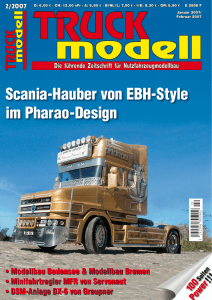
Watcher:
Während der Laufzeit des Programmes, können die Variablen abgefragt werden.
Dies ist ins besonders für das Debuggen gut. Auf dem Screenshot sieht man, dass
sich unser Programm wie der Regler verhalten sollte.
5.) Erkenntnisse aus der Übung:
Mithilfe von Programmen lässt sich jeder Regler, einfachst auf dem Computer
realisieren. Lediglich eine SBS benötigt man noch dazu.
TI HTBL-Hollabrunn
Andreas HAGER 5BHELI
D:\481346406.doc
6/6