TVC-MF-10 Fulloption Modul mit Sound für RC
Werbung

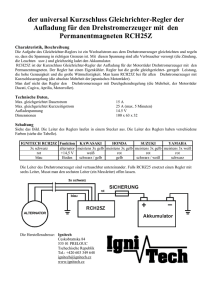
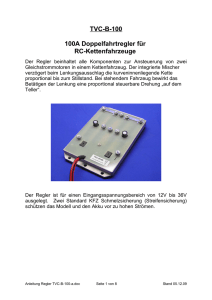
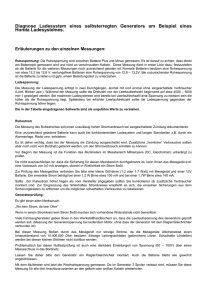
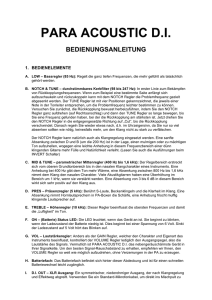
TVC-MF-10 Fulloption Modul mit Sound für RC-Kettenfahrzeuge im Maßstab 1:16 bis 1:10 Das Modul ist zur vollständigen Steuerung von Kampfpanzers in einem RC-Kettenfahrzeug entwickelt worden. Als Fahrtregler kann der TVCB10 oder TVC-B30 angeschlossen werden. Für verschiedene Kampfpanzern existieren unterschiedliche Versionen, die sich durch den Sound unterscheiden: HT1: Tiger 1 HT2: T-34 HT3: Panther HT4: Panzer III MT1: Leopard 1 MT2: Leopard 2 MT6: Abrams Hinweis: Zum Einbau des Moduls in ihr Modell braucht es gute Kenntnisse im Funktionsmodellbau. Die mitgelieferten Anschlusskabel müssen lastseitig gelötet oder angeklemmt werden. Modellbau-Einsteiger und Jugendliche unter 16 Jahren sollten sich Rat von erfahrenen Modellbauern einholen. Anleitung Regler TVC-MF-10-a.doc Seite 1 von 18 Stand 16.03.08 Das Modul steuert folgende Funktionen: • Fahrmotoren proportional mit Mischer • Turmdrehung proportional mit Fahrtregler und Servoausgang • Rohrwiege proportional mit Fahrtregler und Servoausgang • Rohrrückstoß/Schuß mit Blitz (Blitzled) und Servoausgang • Maschinengewehr • Sound zu allen Funktionen (Motor anlassen/abstellen, "Standgas", 14 Fahrstufen, Hauptwaffe, MG, Turmdrehung) • automatische Ansteuerung von Bremslicht, Rückfahrscheinwerfer, Blinklicht • automatische, getrennte Ansteuerung von Abgassimulationspumpe und Heizelement Der Regler ist für einen Eingangsspannungsbereich von 7,2V bis 12V ausgelegt. Eine integrierte 10A Schmelzsicherung schützt das Modell und den Akku vor zu hohen Strömen. Der Fahrtregler ist separat abgesichert. Abbildung 1 Anschlußmöglichkeiten des TVC-MF 10 Anleitung Regler TVC-MF-10-a.doc Seite 2 von 18 Stand 16.03.08 Funktion: Zur Steuerung des Moduls wird eine Funkfernbedienung mit vier Proportionalkanälen benötigt. Das Modul ist mit zwei Mikroprozessoren ausgestattet, die mit umfangreichen Failsafe-Funktionen das unbeabsichtige Auslösen der Aktionen verhindern. Die Funktionen des Moduls werden wie folgt auf die vier Proportionalkanäle gelegt : Kanal 1 - proportional Links/Rechts über integrierten V-Mischer. Der integrierte Mischer verzögert beim Lenkungsausschlag die kurveninnenliegende Kette proportionale bis zum Stillstand. Bei stehendem Fahrzeug bewirkt das Betätigen der Lenkung eine proportional steuerbare Drehung „auf dem Teller“ (Tellerwende). (hieraus wird Blinker rechts/links blinken/aus erzeugt) Kanal 2 - proportional vor/zurück (aus dem "Gas"-Kanal wird auch Rückfahrscheinwerfer ein/aus, Bremslicht und Raucherzeugung abgeleitet) Kanal 3 - proportional Rohrwiege rauf/runter. Bei schneller Betätigung in die Maximalposition wird das MG (oberer Anschlag) bzw. die Hauptwaffe (unterer Anschlag) ausgelöst. Für das MG flackert eine Lampe/LED zum Sound, für die Hauptwaffe wird ein Motorausgang geschaltet und eine LED angesteuert. Zur Simulation des Rohrrückzugs wird ein Servo angesteuert. Er läuft beim Abfeuern schnell zurück und kehrt nach einer Verweilzeit langsam in die Ausgangslage zurück. Kanal 4 - Turmdrehung Links/rechts Anleitung Regler TVC-MF-10-a.doc Seite 3 von 18 Stand 16.03.08 Fahrdynamische Funkionen: Abgassimulationsanlage: Das Modul ist für die getrennte Ansteuerung des Destillaterhitzers und der/des Luftpumpe/Ventilators ausgelegt. Der Destillaterhitzer wird immer eingeschaltet, sobald das Modell gültige Funksignale empfängt. Der Ausgang für das/die Gebläse/Luftpumpe wird in Abhängigkeit von der Beschleunigung und der Geschwindigkeit gesteuert. Steht das Modell, ist auch der Ausgang inaktiv. Es tritt nur leichter Rauch aus. Beschleunigt das Modell, wird der Ausgang, je nach Beschleunigung unterschiedlich lang, voll durchgeschaltet, um einen maximalen Rauchausstoss zu erhalten. Bei unbeschleunigter, kontinuierlichen Fahrt wird der Ausgang auf mit 50% reduziert (mittels PWM): Rückfahrscheinwerfer: Der Rückfahrscheinwerferausgang wird eingeschaltet, sobald der GasHebel Rückwärts steuert. Sobald der Gas-Hebel in Neutral- oder geradeaus-stellung ist, wird das Rücklicht ausgeschaltet. Rundumlicht: Das Rundumlich läuft ständig mit ca. 1,5 Umläufen pro Sekunde. Blinker Links + Rechts: Ab einer Mindestgeschwindigkeit von ca. 10% der Höchstgeschwindikeit schaltet sich die Blinkautomatik ein. Bei Lenkstellung rechts wird rechts geblinkt, bei Lenkstellung Links blinkt der linke Blinkerausgang mit einer Frequenz von ca. 1Hz . Bremslicht: Das Bremslicht schaltet sich automatisch bei Verzögerung der Fahrt ein. Je stärker verzögert wird, desto länger leuchtet das Beremslicht. Wird wieder beschleunigt, schaltet das Bremslicht sofort ab. MG: Das MG Licht blinkt mit ca. 2Hz bei Auslösen eines Schusses. Gleichzeitig spielt das Soundmodul das hinterlegte MG Geräusch ab. Hauptwaffe: Wird die Hauptwaffe betätigt, wird der LED Ausgang kurz aktiv und der Servo für den Rohrrückzug läuft schnell zurück und kehrt nach einer Verweilzeit langsam in die Ausgangslage zurück. Das erneute Auslösen ist erst nach dem Ablauf einer Ladezeit möglich. Zusätzlich wird ein zweiter Ausgang so lange aktive geschaltet, so lange der Steuerknüpel im Auslösebereich ist. An diesen Ausgang kann z.B. die Abschußvorrichtung von Hong Leng Modellen anschliessen. Anleitung Regler TVC-MF-10-a.doc Seite 4 von 18 Stand 16.03.08 Einbau: Vor dem Einbau des Moduls schließen sie am besten alle verwendeten Komponenten auf dem Arbeitstisch an und machen sich mit der Funktionsweise vertraut. Insbesondere mit den Maximalausschlägen der Servopositionen. Die zuletzt eingestellten Servopositionen werden von dem Modul gespeichert, so dass beim Einschalten keine großen Servoausschläge zu erwarten sind. Trotzdem kann es, abhängig vom verwendeten Servo, im Einschaltmoment zu einem kurzen Ruck kommen. Achten Sie bei Verwendung von Servo's darauf, dass die Servo's ihre angesteuerte Endlage erreichen können. Werden sie mechanisch blockiert (z.B. durch einen Anschlag der Anlenkhebel), fließen i.d.R. Ströme zwischen 300mA und 500mA statt der üblichen ca. 40mA in der Ruheposition. Lage der Bedienelemente Anleitung Regler TVC-MF-10-a.doc Seite 5 von 18 Stand 16.03.08 Anschluss der Servoleitungen am Empfänger: Die Servokabel sind mit dem Modul fest verlötet. Sie sind durchnummeriert und mit entsprechend vielen schwarzen Strichen gekennzeichnet. Es müssen immer alle vier Servoleitungen an den Empfänger angeschlossen werden. Kanal 1 2 3 4 Funktion Lenkung Gas Rohrwiege und Schußfunktion Turmdrehung Bitte achten Sie darauf, dass sie Lenkung und Gas nicht vertauschen. Dies führt beim Ermitteln der Fahrtrichtung der Motore leicht zur Verwirrung. Grund ist , dass der Regler auf der Lenkung mit der Tableturnfunktion arbeitet, das Modell bei entsprechender Polung der Motore also auch bei vertauschten Servoanschlüssen scheinbar richtig fährt. Der Regler ist mit BEC ausgestattet, er versorgt über die Servoleitungen den Empfänger mit Energie. Anleitung Regler TVC-MF-10-a.doc Seite 6 von 18 Stand 16.03.08 Anschluss des Fahrakku und des Scalebus Kabels Die Stromversorgung erfolgt über den grünen steckbaren Schraubklemmenblock. Das TVC-MF10 und der TVC-B10/30 werden parallel mit dem Fahrakku verbunden. Sinnvollerweise sollte in die Zuleitung zum Akku ein Schalter zum Ein/Ausschalten des Modells vorgesehen werden. Dazu kann unser Kabelbaum 3030 verwendet werden. Das TVC-MF10 und der TVC-B10/30 werden über den Scalebus miteinander verbunden, dazu liegt dem TVC-MF10 ein entsprechendes Kabel bei. Die weißen Stecker sind mechanisch vor Verpolung geschützt. Die Servokabel des TVC-B10/30 dürfen nicht in den Empfänger eingesteckt werden, den der Regler wir über den Scalebus vom TVCMF10 gesteuert. Belegung des Steckers für die Stromversorgung Anleitung Regler TVC-MF-10-a.doc Seite 7 von 18 Stand 16.03.08 Abbildung 2 Anschluß des Fahrakkus und des Scalebus Anleitung Regler TVC-MF-10-a.doc Seite 8 von 18 Stand 16.03.08 Anschluss der Fahrmotore: Die Antriebsmotoren werden am TVC-B10/30 an den schwarzen, steckbaren Schraubklemmen angeschlossen. Die Motoren müssen, wie im Modellbau üblich, unbedingt funkentstört sein. Die Spannung für den Motor entspricht der Spannung des angeschlossenen Akkus. Abbildung 3Anschluß der Fahrmotore Anleitung Regler TVC-MF-10-a.doc Seite 9 von 18 Stand 16.03.08 Anschluss der Turmmotore/servos: Die Motore für Turmdrehung und Rohrwiege werden an den dreipoligen Steckern angeschlossen. Einer der drei Kontakte bleibt gemäß der Abbildung frei. Abbildung 4Anschluß des Turmdreh- und Rohrwiegemotor's bzw Servo's Zusätzlich zu diesen beiden Motorausgängen steuert das Modul zwei Servoausgänge gemäß der Turmdrehung und der Rohrwiege an. Diese Funktion ist immer parallel zu den Motorausgängen aktiv, man kann diese Funktion beliebig kombinieren, z.B. einen Getriebemotor für die Turmdrehung und einen Servo für die Rohrwiege verwenden. Die Servofunktionen sind gedämpft, so dass sich eine realistische Bewegung ergibt. Die Servos werden über die integrierte BEC versorgt. Servos mit Robbe/Futaba oder Graupner/JR können direkt in das Modul gesteckt werden. Die Masse (schwarze bzw braune Leitung des Servokabels) zeigt dabei zur Außenseite des Moduls. Anleitung Regler TVC-MF-10-a.doc Seite 10 von 18 Stand 16.03.08 Anschluss des Rohrrückzugservos: Der Servo für den Rohrrückzug wird über die integrierte BEC versorgt. Der Steckverbinder im Modul ist für Robbe/Futaba oder Graupner/JR Stecker geeignet. Die Masse (schwarze bzw braune Leitung des Servokabels) zeigt dabei zur Außenseite des Moduls. Abbildung 5Lage des Rohrrückzugservos Anleitung Regler TVC-MF-10-a.doc Seite 11 von 18 Stand 16.03.08 Anschluss des Lautsprechers: Der Lautsprecher wird an dem braunen, zweipoligen Stecker in der Mitte der Platine angeschlossen. Hieran kann direkt ein Lautsprecher angeschlossen werden. Wir empfehlen einen 8Ohm Lautsprecher, sie können aber auch 4Ohm und 16Ohm Lautsprecher verwenden. Direkt unter dem Stecker befindet sich das Poti zur Einstellung der Lautstärke. Der Lautsprecher sollte in keinem Fall einfach nur in das Modell gelegt werden, denn dann erfolgt ein sog. akustischer Kurzschluss. Dabei erfolgt das gegenseitige teilweise Auslöschen der von beiden Membranseiten abgestrahlten Schallwellen. Die entstehenden Druckschwankungen sind hierbei vor und hinter der Membran zu dem gleichen Zeitpunkt fast exakt gegenphasig und heben sich zu grossen Teilen auf. Den Lautsprecher sollten Sie daher so in das Modell einbauen, dass der Schall gut Abbildung 6Lautsprecheranschluß aus der Vorderseite austreten kann und die Luft nicht direkt von der Vorderseite auf die Rückseite des Lautsprechers fliessen kann. Ein voluminöses, geschlossenes Gehäuse erfüllt auch den Zweck und verstärkt den akustischen Gesamteindruck erheblich. Wenn man den Klang seines Modell optimieren will, sollte man sich unserer Erfahrung nach mit dieser Box beschäftigen, sie hat den größten Einfluss auf den Klang. Sehr gut abgestimmten Boxen sind z.B. die Tamiya Lautsprecher. Anleitung Regler TVC-MF-10-a.doc Seite 12 von 18 Stand 16.03.08 Anschluss der Beleuchtung, Abgasanlage und des Schußmotor Die Ausgänge schalten die Akkuspannung, daher muss der angeschlossene Verbraucher für diese Spannung geeignet sein. Wird das Modell z.B. mit einem 12 Volt Akku betrieben, sollte der Verbraucher ebenfalls für 12V Nennspannung ausgelegt sein. Bei LED’s sind entsprechende Vorwiderstände vorzusehen. Die Ausgänge können auch induktive Lasten (z.B. Relais) schalten. Abbildung 7Innenschaltung der lampenausgänge. Beispielhaft sind zwei Ausgänge angeschlossen. Anleitung Regler TVC-MF-10-a.doc Seite 13 von 18 Stand 16.03.08 Linke Pfostenreihe Mittlere Pfostenreihe Rechte Pfostenreihe (+) MG LED (-)Masse Fahrakku (-) MG LED (+) Rundumlicht 1+2 (-) Rundumlicht 1 (-) Rundumlicht 2 (+) Rundumlicht 3+4 (-) Rundumlicht 3 (-) Rundumlicht 4 (+) Hauptwaffe (-) Hauptwaffe Schußmotor Frei (-) Hauptwaffe LED (+) Fahrlicht (-) Fahrlicht (+) Rückfahrscheinwerfer und Bremslicht (+) Blinker (-) Rückfahrscheinwerfer (-) Bremslicht (-) Blinker links (-) Blinker rechts (+) Abgaserzeuger (-)Abgaserzeuger Heizung (-) Abgaserzeuger Motor Belegung des Pfostensteckers für Licht, Abgassteuerung und Schußmotor Anleitung Regler TVC-MF-10-a.doc Seite 14 von 18 Stand 16.03.08 Inbetriebnahme: Einschalten: 1. Den Sender einschalten. 2. Den Fahrakku anschließen. 3. Den Gas- und Steuerhebel auf Mittelstellung einstellen (Die zugehörige Trimmung ebenfalls). 4. Den Empfänger einschalten. Die LED leuchtet für ca. 1s. 5. Die LED auf der Platine blinkt bis der Regler die Mittelstellung der Kanäle erfasst hat. Ist die Nullpunkterfassung nicht möglich, so leuchtet die LED nicht auf. Eine erneute Bestimmung des Nullpunktes erfolgt erst nach Ein/Ausschalten des Empfängers. 6. Wenn die LED dauernd leuchtet, ist das Fahrzeug fahrbereit Diese automatische Kalibrierung erfolgt in dieser Weise bei jeder Einschaltung. D.h. die beim Einschalten erkannte Position wird als Neutralposition gespeichert. Das gilt für alle vier Kanäle . Fahrtrichtung korrigieren: Die Fahrtrichtung hängt von der mechanischen Anordnung der Motore im Fahrzeug ab. In der Regel werden die Motoren so montiert, dass die Motorwellen in entgegengesetzte Richtungen weisen (Tamiya und Academy Modelle). Folge ist, dass die Motoren mit unterschiedlicher Polarität angeschlossen werden müssen, um in eine Richtung zu fahren. Natürlich kann die Korrektur der Fahrrichtung an Sendern mit der ServoRevers-Einstellung direkt erfolgen. Verfügt der Sender nicht über diese Möglichkeit, kann wie folgt vorgegangen werden: - Modell fährt vorwärts, wenn das Gas nach vorne steuert und umgekehrt: Anschlüsse an beiden Motoren wechseln (umpolen) - Modell fährt links, wenn Lenkung nach rechts steuert und umgekehrt: Die Anschlüsse zwischen den beiden Motoren wechseln und dabei umpolen. (Anschlussleitung von Motor 1 an Motor 2 und umgekehrt) - Die Richtungssteuerung steht auf neutral, aber das Modell fährt nicht geradeaus: Mit Lenkungstrimmung korrigieren Optionen: – – – Sounds für andere Panzermodellen Modul mit kleinerer Endstufe (benötigt keinen externen Fahrtregler) (TVC-TRF-10) Modul mit kleinerer Endstufe ohne Rauch und Servosteuerung, ohne Scalbus (TVC-TRF-05) Anleitung Regler TVC-MF-10-a.doc Seite 15 von 18 Stand 16.03.08 Praxistips: Das Modul erkennt bestimmte Modi (z.B. Tableturn) dadurch, dass die Neutralstellung des Steuerknüppels verlassen wird. Bei rastenden Steuerknüppeln (oft für's Gas verwendet), ist das eindeutige Rückstellen in den Neutralbereich nicht immer gegeben und das Modul springt zwischen zwei Modi hin und her. Das kann u.U. Unterschiedliche Sound zur Folge haben. Wir empfehlen daher den Sender mit selbstrückstellenden Steuerknüppel zu betreiben. Das Regelverhalten der Tamiya-Regler unterscheidet sich von diesem Regler. Der Regler reduziert bei Kurvenfahrt die Geschwindigkeit der innenliegenden Kette. Damit wird aber auch die Antriebsleistung insgesamt reduziert. Dies merkt man besonders bei lang gestreckten Kurven. Ist dies nicht gewünscht, muss mit dem Geschwindigkeitsregler manuell nachgeregelt werden. Anders die Tamiya Regler (z.B. DMD-T01). Diese beschleunigen bei langsamer Kurvenfahrt die außen liegende und verzögern die innenliegende Kette um die Gesamtantriebsleistung konstant zu halten. Die verwendeten Motoren müssen galvanisch vollkommen getrennt sein. (Bei Tamiya Modellen ist das immer der Fall.) Sie können das mit einem Messgerät/Durchgangsprüfer feststellen, indem sie bei montierten Motoren zwischen jeweils einer Anschlußleitung auf Durchgang prüfen. Sie dürfen nicht miteinander elektrisch verbunden sein. In der Praxis kommt dies z.B. vor, bei: 1. Scheibenwischermotore. Einige Modelle nutzen das Gehäuse als Rückleiter. Sind die Motore auf eine gemeinsame Metallplatte geschraubt, so sind sie dadurch elektrisch miteinander verbunden. Bitte diese Antriebe isoliert montieren, z.B. auf einer Kunststoffplatte. 2. Es gibt Motore mit integrierten Endstörung, die das Motorgehäuse mit einerniederohmiger Induktivität gegen einen Motoranschluß legen. Von außen siehst man das i.d.R. nicht. Die Induktivitäten sind intern auf dem Lagerschild der Kommutatorbürsten angebracht. Auch hier hilft eine isolierte Montage. 3. Bei Bausätzen mit Kabelfernsteuerung wird oft jeweils ein Anschluss der Fahrmotoren mit dem des anderen verbunden. Das spart eine Leitung bei der Kabelfernbedienung, ist aber für unabhängige elektronische Regler ungeeignet. Hier ist einfach die Verbindung zwischen den Motoren im Fahrzeug zu trennen. Anleitung Regler TVC-MF-10-a.doc Seite 16 von 18 Stand 16.03.08 Technische Daten: Nenn-Motorstrom Antrieb Nenn-Motorstrom Turm und Rohrwiege Nenn-Ausgangstrom Schaltfunktionen Nennleistung Audioverstärker Versorgungsspannung 5 Ampere pro Motor 0,8 Ampere pro Motor 0,4 Ampere pro Kanal 8W/7V 14W/12V 7,2 bis 12 V Zulässiger BEC Strom PWM Frequenz Typische maximale Verlustleistung Typischer Spannungsabfall in der Endstufe Abmessungen Softwareversion 300mA 2KHz 3 Watt 1.5 Volt 63x70x12mm (ohne Steckverbinder) 01.02.06 Wichtig ! Betreiben sie das Gerät nur in den zulässigen Betriebsbedingungen. Führen Sie keine Veränderungen an dem Regler durch. Das Gerät darf keinem Spritzwasser oder Regen ausgesetzt werden ( Kurzschlussgefahr! ) Hinweis ! Das Gerät wurde nach der Herstellung einer sorgfältigen Überprüfung unterzogen. Es ist nur für den bestimmungsmäßigen Gebrauch gedacht. Wir übernehmen keine Haftung für Schäden oder Folgeschäden im Zusammenhang mit diesem Produkt. Wir übernehmen keine Gewähr für Schäden, die durch Abänderung der Schaltung, nicht beachten der Anschluss – und Anbauanleitung, Anschluss an eine falsche Spannung oder Stromart, Falschpolung der Baugruppe, Fehlbedienung, fahrlässige Behandlung oder Missbrauch, Veränderung oder Reparaturversuch entstanden sind. Sollten Sie das Gerät verändern (hierzu zählt z.B. auch der Einbau in ein Gehäuse oder Modell) und weitergeben, sind Sie Hersteller im Sinne des Gesetzes, und damit verpflichtet die Gebrauchsanweisung und dieses Haftungsausschluß mit dem Gerät mitzuliefern. SGS electronic Dipl.-Ing. Rainer Stelzer www.sgs-electronic.de Anleitung Regler TVC-MF-10-a.doc Seite 17 von 18 Stand 16.03.08 Anleitung Regler TVC-MF-10-a.doc Seite 18 von 18 Stand 16.03.08