TVC-GSU-11 Waffenstabilisierung für Modell
Werbung

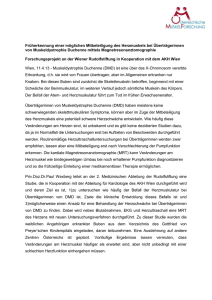
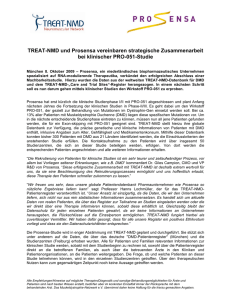
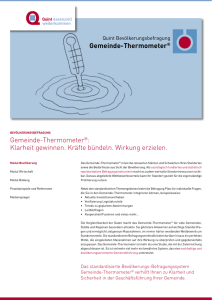
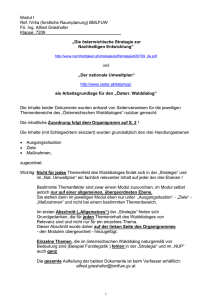
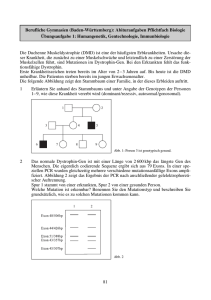
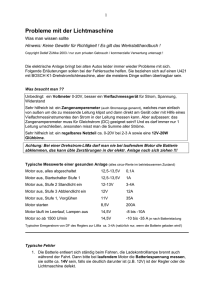
TVC-GSU-11 Waffenstabilisierung für Modell-Kampfpanzer Das Modul stabilisiert die Rohrwiege und den Turm. Dazu sind ein Gyro Sensor und ein Beschleunigungssensoren auf der Platine untergebracht. Die Ansteuerung der Rohrwiege erfolgt über einen Servo, die Turmdrehung über einen Getriebemotor. Zur Ansteuerung des Turmdrehmotors ist bereits ein Fahrtregler mit 1A Dauerlast integriert. Das Modul ist speziell für die Umrüstung von Tamiya Modellen mit DMD (insbesondere dem Leo 2A6) entwickelt worden. Für Modelle ohne DMD empfehlen wir den TVC-GSU-10. Dieser beinhaltet z.B. zusätzlich eine Ansteuerung eines Servos für den Rohrrückzug und ist mit dem ScaleBus ausgestattet. Hinweis: Zum Einbau des Moduls in ihr Modell braucht es gute Kenntnisse im Funktionsmodellbau. Die mitgelieferten Anschlusskabel müssen lastseitig gelötet oder angeklemmt werden. Modellbau-Einsteiger und Jugendliche unter 16 Jahren sollten sich Rat von erfahrenen Modellbauern einholen. Anleitung Regler TVC-GSU-11-b.doc Seite 1 von 11 Stand 29.07.08 Eingesetzte Technologie: Der Regler ist mikroprozessorgesteuert. Der Prozessor arbeitet mit 16MHz Taktfrequenz. Die Inertialsensoren sind sog. MEMS Sensoren (Micro Electro Mechanical Systems), d.h. das mikromechanische Kreisel-/ Trägheitssystem ist vollständig auf einem Halbleiter implementiert. Als Sensor für die Drehachsenstabilisierung wird ein Gyroscope eingesetzt. Die maximal erfassbare Winkelgeschwindigkeit beträgt ±300°/s. Zur Messung der Winkellage zum Erd-Schwerefeld wird ein Beschleunigungssensor eingesetzt. Zur Unterdrückung hochfrequenter Beschleunigungen sind in der Software digitale Filter und Dämpfungsglieder (gleitende Mittelwertbildung) implementiert. Die Dämpfungsparameter der Turmdrehung und der Rohrwiege sind über jeweils einen Servokanal während des Betriebes des Modells einstellbar. Die Software ist in C und Assembler codiert. Anleitung Regler TVC-GSU-11-b.doc Seite 2 von 11 Stand 29.07.08 Funktion: Steuerung und Stabilisierung der Turmdrehung: Die Ausrichtung des Turmes wird automatisch durch das Modul beibehalten. Erst wenn am Sender der Turmmotor betätigt wird stoppt die Regelung so lange, bis der manuelle Eingriff beendet ist, danach wirkt sofort wieder die Lagestabilisierung. Die Empfindlichkeit lässt sich über einen Proportionalkanal (X6) der Fernsteuerung verändern. Über den Proportionalkanal X1 kann die Regelungsfunktion abgeschaltet werden. Bei eingeschalteter Stabilisierung leuchted die LED 2. Ausserdem wird der Ausgang X12 geschaltet. Daran kann man z.B. einen Laser anschliessen. Der Ausgang schaltet die Akkuspannng und ist mit 500mA belastbar. Das Modul erkennt den Heckbereich der Turmstellung und verfährt das Rohr in diesen Bereich auf eine Mindesthöhe um der Kollision auszuweichen. Dazu wird der Mikroschalter der den Heckbereich der Turmstellung erkennt statt an die DMD (ehemals J13) an das Modul angeschlossen. Die manuelle Steuerung der Turmdrehung wir erst nach einer Zeit von ca. 200ms wirksam. Dies ist notwendig, um die von Tamiya einprogrammierte Doppelbelegung des Turmdrehkanals zu berücksichtigen und nicht schon bei kurzen Betätigen des Kanals zum Einschalten der Lichtfunktion den Turm zu verfahren. Steuerung und Stabilisierung der Rohrwiege: Wie bei der Turmdrehung wirkt auch hier ständig die Stabilisierung. Hier wird allerdings nicht nur durch den manuellen Eingriff übersteuert, sondern auch durch die von der DMD ausgelösten Simulation der Ladeautomatik. Dadurch bleibt die Funktion der DMD vollständig erhalten. Die Empfindlichkeit der Rohrwiege lässt sich über einen Proportionalkanal (X3)der Fernsteuerung verändern. Über den Proportionalkanal X1 kann die Regelungsfunktion abgeschaltet werden. Bei eingeschalteter Stabilisierung leuchted die LED 2. Ausserdem wird der Ausgang X12 geschaltet. Daran kann man z.B. einen Laser anschliessen. Der Ausgang schaltet die Akkuspannng und ist mit 500mA belastbar. Anleitung Regler TVC-GSU-11-b.doc Seite 3 von 11 Stand 29.07.08 Einbau: Obwohl das Modul für den Einbau in den Tamiya Leopard 2A6 optimiert ist, kann es auch in Modelle mit klassischer Fernsteuertechnik eingebaut werden. Es sind keine weiteren Module zur Turmstabilisierung notwendig. Einbau in das Modell Tamiya Leopard 2A6 Durch den eingebauten Fahrtregler wirkt die Stabilisierung direkt auf den Turmdrehmotor. Daher muss der Stecker des Motors (Grau-Orange Leitung) von der DMD gelöst werden und mit dem mitgelieferten Kabel (braune Stecker) verbunden werden. (schwarz an grau, rot an orange) Die Turmdrehung wird nun von der Stabilisierung gesteuert. An den Empfänger muss anstatt des DMD-Servokabels für die Turmdrehung das Servokabel (4) angeschlossen werden. Damit der Turmdreh-Sound weiter abgespielt wird, ist in das Modul ein V-Kabel integriert. Der DMD Kanal für die Turmdrehung wird in die Servobuchse (5) gesteckt. Der Mikroschalter der den Heckbereich der Turmstellung erkennt, wird statt an die DMD (weisser Stecker, schwarz-braunes Kabel, ehemals J13) an das Modul (X8) angeschlossen. Der Servokanal für die Rohrwiege (2) der Stabilisierungselektronik wird in den Servoausgang der DMD gesteckt (J5). Der Servo der Rohrwiege wird in Buchse wie im Bild gezeigt eingesteckt. Die Trägheit der Rohrwiege (3) und der Turmstabilisierung (6) lässt sich über jeweils einen weiteren Proportionalkanal einstellen. Nach dem Einschalten ist die Trägheit 50% des Maximalwertes. Anleitung Regler TVC-GSU-11-b.doc Seite 4 von 11 Stand 29.07.08 Abbildung 1 Anschluss des Moduls. Die Farben der Motorleitungen entsprechen den Farben der Tamiya Leitungen. Bitte auf richtige Polarität des Motors achten, sonst kann der Regler keine stabile Lage erreichen und er schwingt hin und her. Anleitung Regler TVC-GSU-11-b.doc Seite 5 von 11 Stand 29.07.08 Einbaulage: Das Modul muß in einer vorgegebenen Orientierung im Turm platziert werden. D.h. die Leiterplatte muss parallel zum Boden des Turmes liegen und der grüne Stecker muss in die Richtung der Hautwaffe zeigen. Wo genau im Turm das Modul platziert wird, ist nicht entscheidend. Z.B. kann das Modul auch an die Stelle des Empfängers platziert werden. Abbildung 2 Die aus unserer Sicht beste Position für den Einbau des Moduls. Auf die Halterung des Turmdrehmotors wurde eine Grundplatte aus ABS geklebt. Drauf ist das Modul mit doppelseitigem Klebeband gefestigt. (In dieser Entwicklungsversion ist der Schrumpfschlauch entfernt ) Anleitung Regler TVC-GSU-11-b.doc Seite 6 von 11 Stand 29.07.08 Abbildung 3 Verdrahtung des Turmes mit dem FO Modul. Zu sehen ist auch das Schalterkabel welches den Akku und das TVC-GSU-11 vollständig vom Akku trennt. Anschluss von Akku, Empfänger, Motoren und Servo's: Der Digitalteil des Regler wird aus den 5V des Empfängers versorgt. Die Stromversorgung der Endstufe des Turmdrehmotors wird separat eingespeist. In der Regel wird man den Regler parallel zur DMD an den Akku anschließen. Da die Motorendstufen im Modul einen Ruhestrom von ca. 2mA benötigen sollten sie beim Lagern des Modells den Akku trennen. Eine mögliche Lösung für diese Aufgabe sehen Sie oben im Bild, ein Adapterkabel mit Schalter das DMD und TVC-GSU11 vom Akku trennt. Unter Umständen möchte man aber den Turmdrehmotor mit einer höheren Spannung betreiben, um eine höhere Dynamik bei der Turmdrehung zu erreichen. In diesem Fall kann ein zusätzlicher Akku mit höherer Spannung verwendet werden. Eine Schmelzsicherung schützt das Modell und den Akku vor zu hohen Strömen. Anleitung Regler TVC-GSU-11-b.doc Seite 7 von 11 Stand 29.07.08 Für den Akku ist eine steckbare Schraubklemme vorgesehen. Bitte beachten Sie die Polarität der Versorgungsspannung. Der Regler ist nicht gegen Verpolung geschützt. Belegung des Steckers für die Stromversorgung Die Servo-Eingänge sind mit Strichen wie folgt markiert: Striche Funktion Anschluß an Regelung ein/aus Empfänger Schaltkanal (2 oder 3 stufiger Schaltkanal.) 1 Servo 2 Rohrwiege DMD T-07 Stecker J5 Empfänger Proportionalkanal 3 Empfindlichkeit Rohrstabilisierung Turmdrehung Empfänger Turmdrehung 5 Turmdrehung Ausgang DMD T-07 Servostecker J4 Empfänger Proportionalkanal 6 Empfindlichkeit Turmstabilisierung 4 Proportionalkanal Hinweis ! Es müssen alle fünf Servokabel an den Empfänger angeschlossen werden, anderenfalls verlässt der Regler nicht den Initialisierungsmodus. Die Servo-Ausgänge : Striche Funktion 1 Rohrwiege Ausgang Anleitung Regler TVC-GSU-11-b.doc Anschluß an Servo Rohrwiege Seite 8 von 11 Stand 29.07.08 Inbetriebnahme: Achtung ! Machen sie sich mit dem Verhalten der Stabilisierung langsam vertraut ! Insbesondere beim Transportieren und Tragen des eingeschalteten Modells treten relativ hohe Winkelgeschwindigkeiten auf, die die Lagereglung sofort versucht auszugleichen. Schalten sie das Modell für den Transport bitte aus ! Einrichten : 1. Die grüne Steckbrücke muß gesteckt sein (Auslieferungszustand) 2. Sender einschalten 3. Steuerhebel des Turm, der Rohrwiege und der Empfindlichkeiten auf Mittelstellung einstellen. Ein Aus/Schalter in Mittelstellung bringen. 4. Modell einschalten 5. Die linke LED leuchtet 6. Die rechte LED auf der Platine blinkt bis der Regler die Mittelstellung der Kanäle erfasst hat. Ist die Nullpunkterfassung nicht möglich, so leuchtet die LED nicht auf. 7. Die Linke LED erlischt und die rechte LED leuchtet dauernd 8. DMD ausschalten 9. grüne Steckbrücke entfernen Nun ist das Modul betriebsbereit. Die Empfindlichkeit der beiden Kanäle ist nach dieser Prozedur auf 50% eingestellt. Einschalten: 1. Beim Einschalten vermisst das Modul den Nullpunkt der Inertialsensoren, daher muss das Modell beim Einschalten waagerecht stehen. 2. Die rechte LED (diese liegt näher am Rand der Platine) zeigt an, ob die Stabilisierung aktiv ist. Anleitung Regler TVC-GSU-11-b.doc Seite 9 von 11 Stand 29.07.08 Optionen: Eine andere Variante des TVC-GSU 11 wird mittels zwei Potentiometer, statt über zwei Proportionalkanäle eingestellt. Die Turmstabilisierung TVC-GSU 10 gestattet durch den ScalebusAnschluß den Datenaustausch mit anderen Modulen mit ScaleBus Anschluß. Technische Daten: Nenn-Motorstrom Kurzschlußfest gegen Masse, Versorgung und Klemmenschluß PWM Frequenz Abmessungen Softwareversion Anleitung Regler TVC-GSU-11-b.doc Seite 10 von 11 1 Ampere 2KHz 45x35mm Stand 29.07.08 Wichtig ! Betreiben sie das Gerät nur in den zulässigen Betriebsbedingungen. Führen Sie keine Veränderungen an dem Regler durch. Das Gerät darf keinem Spritzwasser oder Regen ausgesetzt werden ( Kurzschlussgefahr! ) Hinweis ! Das Gerät wurde nach der Herstellung einer sorgfältigen Überprüfung unterzogen. Es ist nur für den bestimmungsmäßigen Gebrauch gedacht. Wir übernehmen keine Haftung für Schäden oder Folgeschäden im Zusammenhang mit diesem Produkt. Wir übernehmen keine Gewähr für Schäden, die durch Abänderung der Schaltung, nicht beachten der Anschluss – und Anbauanleitung, Anschluss an eine falsche Spannung oder Stromart, Falschpolung der Baugruppe, Fehlbedienung, fahrlässige Behandlung oder Missbrauch, Veränderung oder Reparaturversuch entstanden sind. Sollten Sie das Gerät verändern (hierzu zählt z.B. auch der Einbau in ein Gehäuse oder Modell) und weitergeben, sind Sie Hersteller im Sinne des Gesetzes, und damit verpflichtet die Gebrauchsanweisung und dieses Haftungsausschluß mit dem Gerät mitzuliefern. SGS electronic Dipl.-Ing. Rainer Stelzer www.sgs-electronic.de Anleitung Regler TVC-GSU-11-b.doc Seite 11 von 11 Stand 29.07.08