DAS DYNAMISCHE GRUNDGESETZ
Werbung

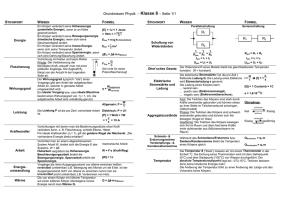
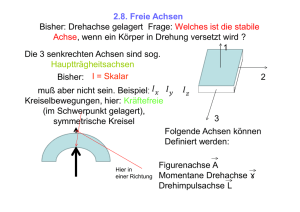
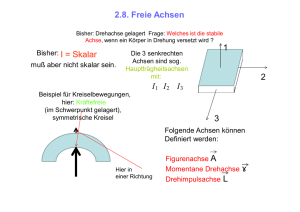
Skriptum zum Fach Mechanik 3.Jahrgang HTL-Eisenstadt DAS DYNAMISCHE GRUNDGESETZ Dipl.Ing.Dr.Günter Hackmüller ©2005 Dipl.Ing.Dr.Günter Hackmüller Alle Rechte vorbehalten e-mail: [email protected] DIE KINETIK Die Kinetik untersucht den Zusammenhang zwischen den Kräften und Momenten, die auf einen Körper wirken, und den Bewegungen, die unter dem Einfluss dieser Kräfte und Momente ablaufen. 1.Die Kinetik der Punktmasse Eine Punktmasse ist eine im Massenmittelpunkt konzentriert gedachte Masse eines Körpers. Wirkliche Körper besitzen immer eine räumliche Ausdehnung. Man darf sie sich durch eine Punktmasse ersetzt denken, wenn • der Körper eine Translationsbewegung ausführt (alle Punkte haben dieselbe Geschwindigkeit wie der Massenmittelpunkt); • von der Eigendrehung des Körpers abgesehen werden kann. Im Rahmen dieses Abschnittes ist immer eine Punktmasse gemeint, wenn von einem Körper gesprochen wird. a.Die Newtonschen Axiome 1.Newtonsches Axiom: In ausgezeichneten Bezugssystemen, den Inertialsystemen, verharrt eine Punktmasse im Zustand der Ruhe oder der gleichförmigen Bewegung, wenn sie nicht durch einwirkende Kräfte gezwungen wird, diesen Zustand zu ändern. Jedes gegenüber einem Inertialsystem gleichförmig bewegte Bezugssystem ist ebenfalls ein Inertialsystem. Für technische Berechnungen werden meist die mit der Erde fest verbundenen Bezugsysteme als Inertialsysteme betrachtet. 2.Newtonsches Axiom: Die an einer Punktmasse angreifende Kraft und die durch sie hervorgerufenen Beschleunigung sind gleichgerichtet und einander proportional: v v F = m⋅a . In Komponenten geschrieben bedeutet dies •• Fx = m ⋅ x = m ⋅ a x •• Fy = m ⋅ y = m ⋅ a y . Das zweite Newtonsche Axiom schreibt jedem Körper eine träge Masse m zu. Ein Kilogramm ist die träge Masse eines in Paris aufbewahrten Normalkörpers, das Urkilogramm: m = 1kg . Die Größe jeder anderen Masse lässt sich wenigstens im Prinzip durch den Vergleich der Beschleunigungen ermitteln, die ein und dieselbe Kraft einmal dem Urkilogramm und das andere Mal der gegebenen Masse erteilt. Die Kraft ist im Internationalen Maßsystem eine abgeleitete Größe. Ihre Einheit ist das Newton F = 1N . Ein Newton ist die Kraft, die der Masse m = 1kg eine Beschleunigung m kgm a = 1 2 erteilt: 1 N = 1 2 s s 3.Newtonsches Axiom: Wird von einer Punktmasse auf eine andere eine Kraft (Aktio) ausgeübt, so bedingt dies, dass der zweite Körper auf den ersten ebenfalls eine Kraft ausübt (Reaktion), die mit der ersten Kraft in Betrag und Wirkungslinie übereinstimmt, jedoch entgegengesetzt gerichtet ist: Aktion=Reaktion. Kräfte treten also stets paarweise auf. Aktionskraft und Reaktionskraft wirken aber an verschiedenen Körpern. b.Zwangskräfte: Bei vielen Problemen treten Zwangsbedingungen auf, die dem Bewegungsablauf geometrische Beschränkungen auferlegen. Dadurch verringert sich die die Zahl der Freiheitsgrade, dh. die Zahl der unabhängigen Koordinaten, die für die Beschreibung der Bewegung des Systems benötigt werden. Jede solche Zwangsbedingung macht sich in Gestalt einer zugehörigen Zwangskraft bemerkbar, die auf das System wirkt. Das betrachtete System folgt der Zwangsbedingung nur, weil es durch diese Zwangskraft dazu genötigt wird. Die Zwangskräfte werden auch als Reaktions- oder Führungskräfte bezeichnet. Während die Wirkung der Zwangskräfte bekannt ist, kennt man die Zwangskräfte selbst i.a. nicht vollständig. Die Newtonschen Axiome allein reichen nicht aus, um Aufgaben mit Zwangsbedingungen zu lösen. Man benötigt vielmehr Informationen betreffend die Natur der Zwangskräfte. Berührungskräfte: An der Kontaktstelle zweier Körper wirkt eine Normalkraft senkrecht auf die Berührebene und eine Tangentialkraft oder Reibungskraft in der Berührebene. • • Reibungskräfte treten i.a. nur auf, wenn die beiden Kontaktflächen aneinander abgleiten können. Reibungskräfte versuchen das Abgleiten der beiden Kontaktflächen zu verhindern. c.Wesentliche Kräfte Gewichtskraft: Überlässt man einen Körper in der r Nähe der Erdoberfläche sich selbst, so bewegt er sich mit konstanter Erdbeschleunigung g in Richtung auf den Erdmittelpunkt. Auf den Körper wirkt daher eine Gewichts- oder Schwerkraft: FG = m ⋅ g mit g = 9.81 m s2 . Luftkräfte: Bei der Relativbewegung eines starren Körpers in flüssigen und gasförmigen Medien treten Kräfte auf. Man unterscheidet zwischen der Auftriebskraft FA senkrecht zur Bewegungsrichtung und der Widerstandskraft FW entgegen der Bewegungsrichtung. Beide hängen von der Dichte ρ des umgebenden Mediums, der Relativgeschwindigkeit V , einer gewählten Bezugsfläche A des Körpers und einem Auftriebs- bzw. Widerstandsbeiwert ab. FA = c A ⋅ ρ 2 ⋅ V2 ⋅ A FW = c W ⋅ ρ 2 ⋅ V2 ⋅ A . Bei kleinen Geschwindigkeiten (kleine Reynoldszahl) – man spricht von schleichender Strömung – ist der Widerstandsbeiwert proportional zum Kehrwert der Geschwindigkeit c W ≈ konst ⋅ V −1 . Die Widerstandskraft ist dann proportional zur Geschwindigkeit FW ≈ konst. ⋅ V . Dieses Reibungsgesetz spielt bei gedämpften Schwingungen eine Rolle. Bei großen Geschwindigkeiten (große Reynoldszahl) kann der Widerstandsbeiwert oft als konstant angenommen werden. Federkraft: Um eine Feder zu dehnen ist eine Kraft erforderlich. Bei einer linearen Feder sind Längenänderung und erforderliche Kraft proportional zueinander. Die Proportionalitätskonstante c ist die Federkonstante: FF = c ⋅ ∆L Dämpferkraft: Um einen Dämpfer mit der Geschwindigkeit V zu öffnen ist eine Kraft erforderlich. Diese wird als proportional zur Öffnungsgeschwindigkeit V mit der Dämpferkonstanten k angesetzt: FD = k ⋅ V Reibungskraft: An einer Stelle der Berührung zweier Körper wirkt eine Kraft normal auf die Berührebene - Normalkraft - und eine Kraft, die in der Berührebene liegt – Reibungskraft. Die Reibungskraft versucht eine Relativbewegung zwischen den beiden Körpern zu verhindern. Haften: Von Haften spricht man, wenn diese Reibungskraft FR zwischen zwei berührenden Körpern ausreicht, um eine Relativbewegung der beiden Körper zu verhindern. Die Größe dieser Reibungskraft ist nach oben durch die Haftreibungskraft begrenzt. Diese Haftreibungskraft F R 0 ist proportional zur Normalkraft F an der Berührungsstelle: N F K ≤ F R 0 = µ 0 ⋅ FN . Die Proportionalitätsgrenze µ 0 ist die Haftreibzahl. Gleiten: Übersteigt die erforderliche Kontaktkraft die Haftreibungkraft, so setzt Gleiten ein. An der Berührungsstelle wirkt dann die Gleitreibungskraft: F R = µ ⋅ FN , die wieder proportional zur Normalkaft an der Berührungsstelle ist. Die Proportionalitätskonstante µ heißt nun aber Gleitreibungszahl. Rollwiderstand: Auch beim Abrollen eines Körpers auf einer Unterlage entsteht ein Bewegungswiderstand, der proportional zur Normalkraft an der Berührungsstelle ist: Froll = µ roll ⋅ FN . 2.Die Kinetik des starren Körpers Jede ebene Bewegung eines Körpers setzt sich aus einer Translation in der Ebene der Bewegung und einer Rotation um eine Achse senkrecht zur Ebene der Bewegung zusammen. Der Körper hat daher zwei Translations- und einen Rotationsfreiheitsgrad. Für jeden dieser Freiheitsgrade ist eine Bewegungsgleichung erforderlich. Insgesamt wird jede ebene Bewegung eines starren Körpers durch drei Bewegungsgleichungen beschrieben. Der Schwerpunktsatz: Der Schwerpunkt eines starren Körpers bewegt sich so, als ob die gesamte Masse in ihm vereinigt wäre und die Resultierende aller äußeren Kräfte an ihm angreifen würde: v v F = m⋅a . In Komponenten geschrieben bedeutet dies •• Fx = m ⋅ x = m ⋅ a x •• Fy = m ⋅ y = m ⋅ a y . Der Momentensatz: Ein Drehmoment, das auf einen Körper wirkt, verursacht eine Winkelbeschleunigung α . Zwischen dem äußeren Moment M A um eine zur Ebene der Bewegung senkrechte Achse durch einen der unten angegebenen ausgewählten Drehpunkte A und der Winkelbeschleunigung α besteht der Zusammenhang • MA = J A ⋅ω = J A ⋅α . M A ............ Moment der äußeren Kräfte um A J A ............. Massenträgheitsmoment bezüglich A ω .............. Winkelgeschwindigkeit der Drehbewegung α ............... Winkelbeschleunigung Ausgewählte Drehpunkte A sind: • • festgehaltene Achse durch A Körperschwerpunkt Der Drehpunkt A darf nicht beliebig gewählt werden. Der Satz gilt in dieser Form nur, wenn die Drehachse durch den Punkt A festgehalten wird oder wenn als Bezugspunkt für die Bildung des Momentes der Körperschwerpunkt S gewählt wird. Nur für den Fall, dass der Abstand des Momentanpols vom Körperschwerpunkt bei der Bewegung konstant bleibt, darf auch der Momentanpol als Drehpunkt A gewählt werden. Die Größe der Winkelbeschleunigung, die ein gegebenes Moment verursacht, hängt vom Massenträgheitsmoment des Körpers bezüglich des Drehpunktes A ab: J A = ∫ r 2 ⋅ dm . J A ............. Massenträgheitsmoment bezüglich einer Drehachse durch A r ............... Abstand des Masseelementes dm vom Drehpunkt A Ist das Massenträgheitsmoment J S bezüglich einer Drehachse durch den Schwerpunktes S bekannt, kann das Massenträgheitsmoment J A um eine parallele Drehachse durch eine beliebigen anderen Drehpunkt A mit Hilfe des Satzes von Steiner berechnet werden: J A = JS + m ⋅ a2 . J A ............. Massenträgheitsmoment bezüglich einer Drehachse durch A J S .............. Massenträgheitsmoment bezüglich einer parallelen Achse durch den Körperschwerpunkt m............... Masse des Körpers a ............... Abstand der beiden parallelen Drehachsen 2.1.Begründung des Schwerpunktsatzes und des Momentensatzes Betrachten wir die ebene Bewegung eines starren Körpers unter dem Einfluss äußerer Kräfte. Als Bezugspunkt A wählen wir einen beliebigen körperfesten Punkt. Für die kartesischen Koordinaten eines beliebigen Massenelementes gilt dann (siehe Abb.) x = x A + ξ = x A + r ⋅ cos ϕ y = y A + η = y A + r ⋅ sin ϕ . Der Körper ist starr. Der Abstand r des betrachteten Masseelementes vom gewählten Bezugspunkt A ist daher konstant. Der Winkel ϕ wird im mathematisch positiven Sinn von der xAchse weg gezählt. dMT dMT Die Geschwindigkeitskomponenten des Masseelementes dm erhält man durch einmalige Ableitung der Koordinaten nach der Zeit: • • • • • • x = x A − ω ⋅ r ⋅ sin ϕ = x A − ω ⋅ η . y = y A + ω ⋅ r ⋅ cos ϕ = x A + ω ⋅ ξ • Für die Winkelgeschwindigkeit gilt ω = ϕ . Eine nochmalige Ableitung nach der Zeit liefert die Beschleunigungskomponenten: •• •• • •• • •• •• • •• • x = x A − ω 2 ⋅ r ⋅ cos ϕ − ω ⋅ r ⋅ sin ϕ = x A − ω 2 ⋅ ξ − ω ⋅ η y = y A − ω 2 ⋅ r ⋅ sin ϕ + ω ⋅ r ⋅ cos ϕ = y A − ω 2 ⋅ η + ω ⋅ ξ . Diesen Körper denken wir uns nun in Elemente der Masse dm zerlegt. An diesen Massenelementen wirkt i.a. neben den Kräfte dFx, dFy noch ein inneres Moment dMT. Für elastische Materialien - und der starre Körper kann als Grenzfall eines elastischen Materials mit unendlich großem E-Modul betrachtet werden - gilt der Satz von den zugeordneten Schubspannungen. Dies ist gleichbedeutend damit, dass das innere Moment dann identisch null ist: dMT = 0. Im folgenden wird dieser Term daher nicht mehr berücksichtigt. Gemäß dem zweiten Newtonschen Axiom bewirken die beiden Beschleunigungen des Teilchens in die beiden Koordinatenrichtungen.: •• •• dFx = dm ⋅ x und dFy = dm ⋅ y Kräfte . Für das Moment dieser Kraft bezüglich des gewählten Bezugspunktes A gilt dM A = dFy ⋅ ξ − dFx ⋅η . Erfahrungsgemäß ändert kein Köper ohne äußere Kraft oder äußeres Moment seinen Bewegungszustand. Die erforderliche äußere Kraft und das erforderliche äußere Moment, die notwendig sind, um den ganzen Körper zu beschleunigen, erhält man daher durch Integration über alle Massenelemente. Einsetzen der abgeleiteten Ausdrücke für die Komponente der Beschleunigung liefert •• • •• • Fx = ∫ dFx = x A ∫ dm − ω 2 ∫ ξ ⋅ dm − ω ∫ η ⋅ dm Fy = ∫ dFy = y A ∫ dm − ω 2 ∫ η ⋅ dm + ω ⋅ ∫ ξ ⋅ dm •• • M A = ∫ dM A = y A ∫ ξ ⋅ dm − ω 2 ∫ ξ ⋅ η ⋅ dm + ω⋅ ∫ ξ 2 ⋅ dm − •• − x A ∫ η ⋅ dm + ω 2 • ∫ ξ ⋅η ⋅ dm + ω ∫η 2 . ⋅ dm Fasst man zusammen und beachtet, dass ( ) m = ∫ dm und J A = ∫ ξ 2 + η 2 ⋅ dm = ∫ r 2 ⋅ dm gilt, vereinfachen sich die Gleichungen zu •• • •• • Fx = m ⋅ x A − ω 2 ∫ ξ ⋅ dm − ω ∫ η ⋅ dm Fy = m ⋅ y A − ω 2 ∫ η ⋅ dm + ω ⋅ ∫ ξ ⋅ dm •• •• • M A = y A ∫ ξ ⋅ dm − x A ∫ η ⋅ dm + J A ⋅ ω Diese Gleichungen gelten noch ganz allgemein für jeden beliebigen körperfesten Bezugspunkt A . Zwei Arten diesen Bezugspunkt zu wählen kommt besondere Bedeutung zu: • Wählt man den Bezugspunkt so, dass er mit dem Schwerpunkt zusammenfällt, so verschwinden die statischen Momente. Die Grundgleichungen der Dynamik des starren Körpers bezüglich des Schwerpunktes lauten daher •• •• Fx = m ⋅ x S • Fy = m ⋅ y S • MS = JS ⋅ ω . Wird der körperfeste Drehpunkt in einem Inertialsystem festgehalten, so gilt natürlich •• xA = 0 und •• yA = 0 . Die Drehbewegung um einen festgehaltenen Drehpunkt A wird dann durch eine einzige Gleichung • MA = JA ⋅ω beschrieben. Die verbleibenden zwei Gleichungen gestatten dann die Berechnung der Komponenten der Kraft, die vom Lager auf den Körper ausgeübt wird: • Fx = − m ⋅ ξ S ⋅ ω 2 − m ⋅ ω ⋅ η S • Fy = − m ⋅ η S ⋅ ω 2 + m ⋅ ω ⋅ ξ S ξ S , η S .......... Schwerpunktkoordinaten bezüglich eines parallel verschobenen Koordi-natensystems mit dem Ursprung in A 2.2.Das Massenträgheitsmoment und der Satz von Steiner Das Massenträgheitsmoment bezüglich einer Drehachse durch den Punkt A ist durch J A = ∫ r 2 ⋅ dm definiert. Die Integration erstreckt sich dabei über den ganzen Körper. Das Massenträgheitsmoment eines homogenen Zylinders um seine Achse: Der Zylinder wird in Zylinderröhren der Wandstärke dr unterteilt. Für das Massenträgheitsmoment einer solchen Zylinderröhre bezüglich der Zylinderachse gilt wegen dm = ρ ⋅ 2 rπ ⋅ L ⋅ dr dJ z = r 2 ⋅ ρ ⋅ 2 rπ ⋅ L ⋅ dr . ρ ........ Dichte des Zylindermaterials L ........ Zylinderlänge Das gesamte Massenträgheitsmoment des Zylinders ergibt sich dann durch Integration über alle Radien von Null bis zum Zylinderradius R : R 1 1 J z = ∫ r 2 ⋅ ρ ⋅ 2rπ ⋅ L ⋅ dr = ρ ⋅ R 4π ⋅ L = mR 2 2 2 0 Jz = . 1 ⋅m⋅R2 2 m............... Zylindermasse R ............... Zylinderradius J z .............. Massenträgheitsmoment eines homogenen Zylinders bezüglich seiner Achse Der Satz von Steiner: Der Satz von Steiner gestattet die Berechnung des Massenträgheitsmoment bezüglich einer beliebigen Drehachse, wenn das Massenträgheitsmoment bezüglich einer zu dieser Drehachse parallelen Achse durch den Schwerpunkt bekannt ist. Gemäß Definition gilt J A = ∫ r 2 ⋅ dm . Der Abstand r des Masseelementes dm von der Achse durch A lässt sich mit Hilfe des Kosinussatzes durch den Abstand rS des Masseelementes vom Schwerpunkt ausdrücken (siehe Skizze): J A = ∫ rS ⋅ dm + a 2 ⋅ ∫ dm − 2 ⋅ a ⋅ ∫ ξ ⋅ dm 2 . Der erste Term ist das Massenträgheitsmoment bezüglich der Schwerachse. Der letzte Term ist Null Da das statische Moment um die um die η −Achse ist Null, der letzte Term verschwindet daher. Zusammenfassend gilt: J A = JS + m⋅ a2 J A ............. Massenträgheitsmoment bezüglich einer Drehachse durch A J S .............. Massenträgheitsmoment bezüglich einer parallelen Achse durch den Körperschwerpunkt m............... Masse des Körpers a ............... Abstand der beiden parallelen Drehachsen Massenträgheitsmoment zusammengesetzter Körper: Wenn ein Körper sich aus Teilkörper zusammensetzt, deren Massenträgheitsmoment bekannt ist, ergibt sich das Massenträgheitsmoment durch Addition der Massenträgheitsmomente der Teile. Dabei ist darauf zu achten, dass sich alle Massenträgheitsmomente auf dieselbe Drehachse beziehen. Ist dies nicht der Fall, kann der Satz von Steiner dabei helfen, die Massenträgheitsmomente vor der Addition auf dieselbe Achse umzurechnen. Trägheitsradius: Denkt man sich den Körper durch eine Punktmasse im Abstand i von einer Schwerachse ersetzt, so bleibt das Massenträgheitsmoment ungeändert, wenn JS = m ⋅i 2 gilt. Dieser Abstand i ist der Trägheitsradius bezüglich dieser Schwerachse: i= JS m . 2.3.Arbeitsplan Die Aufgaben der Kinetik lassen sich im allgemeinen in einzelne Teilaufgaben untergliedern: Identifizieren der Teile des mechanischen System und Freimachen dieser Teile Aufstellen kinematischer Beziehungen: Verschiedene Bewegungsmöglichkeiten sind oft nicht unabhängig voneinander! Für die praktische Durchführung von Berechnung sind in jedem Fall positive Koordinatenrichtungen für • den Weg und damit die Geschwindigkeit und die Beschleunigung • den Winkel und damit die Winkelgeschwindigkeit und die Winkelbeschleunigung zu wählen (in die Skizze einzeichnen!) Aufstellen der dynamischen Grundgleichungen für die Systemteile Lösen des Gleichungssystems Die Beispiele zur Starrkörperkinetik lassen sich in zwei Gruppen einteilen: a. Beispiele bei denen keine Drehbewegung auftritt: der Momentensatz reduziert sich dann auf die Momentenbilanz der Statik. Als Drehachse ist aber immer die Schwerachse zu wählen. b. Beispiele bei denen eine Drehbewegung auftritt. Alle Aufgaben sollten daraufhin untersucht werden, welcher dieser beiden Fälle vorliegt. Lässt sich die Bewegung auch als Bewegung eines Massepunktes beschreiben? 2.3.Die Kinetik der räumlichen Bewegung Ein starrer Körper, der sich im Raum bewegt, hat drei Translations- und drei Rotationsfreiheitsgrade. Für jeden dieser Freiheitsgrade ist eine Bewegungsgleichung erforderlich. Die räumliche Bewegung eines Körpers wird durch sechs Bewegungsgleichungen beschrieben. Der Schwerpunktsatz: Der Schwerpunkt eines starren Körpers bewegt sich so, als ob die gesamte Masse in ihm vereinigt wäre und die Resultierende aller äußeren Kräfte an ihm angreifen würde: v v F = m⋅a Der Schwerpunktsatz ändert seine Form gegenüber dem Schwerpunktsatz der ebenen Bewegung nicht. In Komponenten geschrieben beinhaltet er aber jetzt drei Gleichungen. Der Momentensatz: Für den Fall einer allgemeinen dreidimensionalen Bewegung treten an Stelle des Momentensatzes der ebenen Bewegung nun die folgenden drei nach dem Mathematiker Euler benannten Gleichungen: J x ⋅ ω x − (J y − J z ) ⋅ ω y ⋅ ω z = M x • • J y ⋅ ω y − (J z − J x ) ⋅ ω z ⋅ ω x = M y . J z ⋅ ω z − (J x − J y ) ⋅ ω x ⋅ ω y = M z • x , y, z Jx ,Jy ,Jz Koordinaten: der Koordinatenursprung muss im Körperschwerpunkt liegen; als Koordinatenachsen werden die Hauptträgheitsachsen des Körpers verwendet Massenträgheitsmomente bezüglich der Hauptachsen x , y, z ωx ,ω y ,ωz Komponenten der Winkelgeschwindigkeit in x , y, z -Richtung M x ; M Y ; M Z Moment der äußeren Kräfte um die x , y, z -Achse Achtung: Die Gleichungen gelten in dieser Form nur, wenn als Koordinatensystem das System der Trägheitshauptachsen gewählt wird. Bei symmetrischen Körpern sind die Hauptträgheitsachsen mit den Symmetrieachsen identisch. Diese Gleichungen werden nach dem Schweizer Mathematiker Euler (1707 bis 1783) als Eulersche Gleichungen bezeichnet.