Dynamische Systeme höherer Ordnung
Werbung

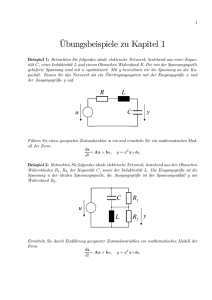
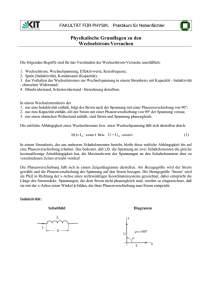
Dynamische Systeme höherer Ordnung Dynamische Systeme höherer Ordnung Lernziele In dieser Vorlesung lernen Sie • wie man die Kreisfrequenz, Frequenz und Schwingungsdauer eines harmonischen Oszillators berechnet. • wie die Potential-Zeit-, die Stromstärke-Zeit- und die Leistungs-Zeit-Funktion bei einem harmonischen Oszillator formuliert werden. • wie man die Abklingzeit und die Kreisfrequenz bei einem gedämpften Oszillator berechnet. • unter welchen Bedingungen ein Serie-Schwingkreis bei harmonischer Anregung den stärksten Strom durchlässt • wie das Verhalten dynamischer Systeme modelliert und analysiert wird. Problemstellung Zwei zylinderförmige Gefässe sind über ein bodennahes Röhrchen miteinander verbunden. Solange das eine Gefäss höher als das andere mit Wasser gefüllt ist, fliesst ein Ausgleichsstrom. Nimmt man Öl statt Wasser, bleibt die Strömung laminar und wir können den Ausgleichsvorgang mit einer Exponentialfunktion beschreiben. Nun denken wir uns das Röhrchen immer dicker bis ein mit Wasser gefülltes U-Rohr vor uns steht. Dann erfolgt der Ausgleichsvorgang nicht mehr über einen einmal abklingenden Volumenstrom, sondern über einen abklingend-oszillierenden Volumenstrom. Wäre die Flüssigkeit suprafluid, würde die Oszillation oder Schwingung überhaupt nicht mehr abklingen. Das Verhalten des U-Rohrs kann durch zwei Speicher mit konstanter Kapazität und einem Leiter mit Widerstand und Induktivität modelliert werden. Analoge Systeme kennt man aus der Elektrodynamik (zwei über eine Spule verbunden Kondensatoren), aus der Translationsmechanik (zwei über eine Feder verbundene Luftkissenfahrzeuge) und aus der Rotationsmechanik (zwei über eine Drehfeder verbundene Schwungräder). Dominiert das Widerstandselement (Strömungswiderstand, elektrischer Widerstand der Spule, Dämpfer in Serie zur Feder), klingt der Potentialunterschied (Druck, Spannung, Geschwindigkeit, Winkelgeschwindigkeit) exponentiell ab, falls sich alle Elemente linear verhalten. Dynamischen Systemen, die aus zwei Speichern bestehen und die über einen Leiter miteinander verbunden sind, können mathematisch zu einem System mit nur einem Speicher und reduzierter Kapazität zusammenfasst werden. Systeme mit Mengenspeicher und Induktivität nennt man Systeme 2. Ordnung, weil man zur Berechnung des Verhaltens zweimal integrieren muss. Systeme 2. Ordnung besitzen zwei unabhängige Energiespeicher. Speicher und Leiter Speicher mit konstanter Kapazität und Leiter mit linearem Widerstand und linearer Induktivität findet man in der Hydrodynamik, der Elektrodynamik, der Translationsmechanik und der Rotationsmechanik. 1 Dynamische Systeme höherer Ordnung Gebiet 2 Speicher Hydrodynamik Widerstand Induktivität Bemerkung laminare Strömung Elektrodynamik oder Kondensator Translationsmechanik Federgesetz Rotationsmechanik Drehfedergesetz Die mechanischen Systemparameter sind oft reziprok definiert: statt eines Impulswiderstandes führt man eine Dämpferkonstante ein; anstelle einer Impulsinduktivität definiert man eine Federkonstante statt statt Harmonischer Oszillator Ein harmonischer Oszillator ist ein schwingungsfähiges System, das aus einem oder zwei Speicher mit konstanter Kapazität und einem Leiter mit stromunabhängiger Induktivität besteht. Lenkt man ein solches System aus und lässt es los, schwingt es sinusförmig (harmonisch) um seine Ruhelage, wobei die Schwingungsdauer unabhängig von der Grösse der Auslenkung ist. Beispiele für harmonische Oszillatoren sind Federpendel, elektrische Schwingkreise und U-Rohr mit sehr grossem Querschnitt. Der harmonische Oszillator ist ein wichtiges Modellsystem der Physik. Er ist durch nur zwei Parameter (Gesamtkapazität und die Induktivität) vollständig beschrieben. Viele komplexere Systeme verhalten sich bei kleinen Auslenkungen näherungsweise wie harmonische Oszillatoren. Der harmonische Oszillator der Quantenmechanik ist eines der wenigen quantenmechanischen Systeme, das sich ohne Näherungen berechnen lässt. In der Elektrodynamik bildet ein über eine ideale Spule (Induktivität L) kurz geschlossener Kondensator (Kapazität C) einen harmonischen Oszillator. Lädt man den Kondensator auf die Spannung U0 auf und verbindet ihn dann mit der idealen Spule, ist die Spannung über beiden Elementen zu jedem Zeitpunkt gleich gross (die Umlaufspannung muss immer gleich null sein) Setzt man für die beiden Spannungen die zugehörigen konstitutiven Gesetze ein, erhält man Nun ersetzt man noch die Stromstärke über die Bilanz durch die Änderungsrate der Ladung Die allgemeine Lösung dieser linearen Differentialgleichung 2. Ordnung mit konstanten Koeffizienten ist wobei für die Kreisfrequenz gilt (Lösung in Differenzialgleichung einsetzen und vergleichen!) Die Ladungsamplitude Q0 und die Phasenverschiebung hängen von den Anfangsbedingungen ab. Mit Hilfe des kapazitiven Gesetzes kann auf die Spannungs-Zeit-Funktion umgerechnet werden mit Dynamische Systeme höherer Ordnung Ersetzt man die Spannung mit Hilfe des induktiven Gesetzes erhält man eine Funktion für die Änderungsrate der Stromstärke . Eine Integration über die Zeit liefert mit Für die Prozessleistung über dem Kondensator oder der Spule gilt Setzt man die Phasenverschiebung δ gleich null (freie Wahl des Zeitnullpunktes), erhält man eine Leistung, die mit doppelter Frequenz (Kreisfrequenz durch 2π) schwingt Während einer Periode oder Schwingungsdauer (2π durch Kreisfrequenz) ist der Kondensator zweimal geladen und der Strom erreicht zweimal seine maximale Stärke. Weil beide Bauteile zusammen mit der Ladung (Kondensator) oder mit dem Strom (Spule) Energie speichern, wird die Energie mit doppelter Oszillatorfrequenz hin und her verschoben. Video: harmonischer Oszillator [1] gedämpfter Oszillator Nun fügen wir beim elektrischen Schwingkreis noch einen Widerstand ein. Widerstand und Induktivität können als einfache Ersatzschaltung für eine reale Spule gesehen werden. Wieder gilt der Maschensatz, wonach Umlaufspannung gleich null sein muss Setzt man wie beim harmonischen Oszillator die konstitutiven Gesetze für die Kapazität, den Widerstand und die Induktivität ein und ersetzt die Stromstärke über die Bilanzgleichung durch die Änderungsrate der Kondensatorladung, erhält man eine lineare Differentialgleichung 2. Ordnung mit konstanten Koeffizienten oder Diese Gleichung wird durch folgende allgemeine Funktion erfüllt Setzt man diese Funktion in die Differentialgleichung ein, erhält man folgende Beziehung Die linke Seite dieser Gleichung kann nur zu allen Zeitpunkten gleich null sein, wenn beide Klammerausdrücke den Wert null annehmen. Damit gilt für die Abklingzeit und für die Kreisfrequenz Ohne Dämpfung ist die Abklingzeit unendlich gross und die Kreisfrequenz entspricht dem Wert des harmonischen Oszillators. Unterschreitet die Abklingzeit einen gewissen Wert, wird der Ausdruck unter der Wurzel negativ und das System schwingt gar nicht mehr, sondern kriecht - wie wenn die Induktivität nicht da wäre - gegen die 3 Dynamische Systeme höherer Ordnung 4 Gleichgewichtslage. Man unterscheidet drei Dämpfungsarten • : unterkritische Dämpfung: System schwingt bezüglich der Gleichgewichtslage hin und her • : kritische Dämpfung: System bewegt sich gegen die Gleichgewichtslage ohne zu überschwingen • : überkritische Dämpfung: System kriecht gegen Gleichgewichtslage Die nachfolgende Tabelle zeigt noch die Analogie zwischen elektrischen und mechanischen Schwingkreisen Thema Elektrodynamik Hydrodynamik Serie-Schwingkreis Kondensator, reale Spule U-Rohr Systemparameter Translation Rotation Körper, Feder, Dämpfer, Körper Schwungrad, Feder, Dämpfer, Schwungrad Kapazität C Widerstand R Induktivität L Kreisfrequenz Abklingzeit k ist die Dämpferkonstante, D die Federkonstante oder Richtgrösse. Bei der entsprechenden Drehgrösse ist noch ein Stern zugefügt. In der Mechanik sind Feder und Dämpfer oft parallel statt in Reihe geschaltet. Der Strom verzweigt sich und man spricht man von einem Parallel-Schwingkreis. Das U-Rohr verhält sich nur bedingt analog zu den andern Systemen, weil die Strömung eher turbulent als laminar ist und das System sich damit nichtlinear verhält. Video: Schwingkreis: Analogie und Dualität [2] Resonanz Ein elektrischer Schwingkreis kann mit einer Wechselspannungsquelle, die man in den Kreis einfügt, angeregt werden. Alle vier Elemente (Spannungsquelle, Kapazität, Widerstand und Induktivität) sind miteinander zu einem nicht verzweigten Kreis verbunden. Die beschreibende Gleichung lautet Das System durchläuft zuerst einen Einschwingvorgang und geht dann in ein stationäres Verhalten über. Der Einschwingvorgang hängt von den Anfangsbedingungen ab. Oft interessiert man sich nur für das stationäre Verhalten nach dem Einschwingvorgang. Dann übernimmt die Spannungsquelle das Zepter und das ganze System schwingt mit . Weil sich alle Elemente im selben Kreis befinden, ist der elektrische Strom überall gleich stark. Im stationären Zustand schwingt der Strom mit der gleichen Frequenz wie die Spannung. Einzig eine Phasenverschiebung ist noch möglich. Diese Überlegung bringt uns zu folgendem Ansatz Nun können wir in der Differentialgleichung die Spannungen mit Hilfe der konstitutiven Gesetze durch die Stromstärken ersetzen Dynamische Systeme höherer Ordnung also also also Würde man jedes der drei Elemente einzeln mit der Spannungsquelle verbinden, wäre die Lösung der Gleichung einfach zu finden: beim Widerstand schwingt der Strom in Phase mit der angelegten Spannung, bei der Kapazität läuft der Strom der Spannung eine Viertelperiode voraus (der Strom baut die Spannung auf) und bei der Induktivität eine Viertelperiode nach (Spannung ändert Stromstärke). Strom- und Spannungsamplituden unterscheiden sich bei allen drei Elementen um einen Faktor, der entweder konstant ist, sich proportional oder reziprok-proportional mit der angelegten Kreisfrequenz ändert. Dieser Faktor, eigentlich eine Verallgemeinerung des Widerstandes, heisst Impedanz Z. Die Verallgemeinerung des Leitwerts, des Kehrwerts der Impedanz, nennt man Admittanz. Betrag und Phase dieser Grössen lassen sich entweder als Zeiger oder als komplexe Zahl darstellen, was das Berechnen von Strom und Spannung stark erleichtert. Der Betrag der Impedanz, also das Verhältnis zwischen den Amplituden der Spannung und der Stromstärke, Scheinwiderstand genannt, kann bei Serie- oder Reihenschaltung mit Hilfe des Pythagoras gerechnet werden Der stärkste Strom tritt dann auf, wenn sich die Blindwiderstände der Kapazität und der Induktivität genau kompensieren. Dann begrenzt nur noch der Wirkwiderstand die Stromstärke. All diese Aussagen lassen sich auf mechanische Systeme übertragen, falls die zugehörigen Bauteile analog angeordnet sind. Oft sind Feder und Dämpfer aber parallel geschaltet (Impuls- bzw. Drehimpulsstrom verzweigen sich) und die Anregung erfolgt nicht mit konstanter Geschwindigkeits- oder Winkelgeschwindigkeitsamplitude. Dann muss man halt den dazu analogen elektrischen Kreis zur Untersuchung beiziehen. Die mechanisch-elektrische Analogie hat mehrere Vorteile. Erstens sind elektrische Systeme schneller aufgebaut, reagieren schneller und sind billiger als mechanische. Zweitens stehen für elektrische Netzwerke leistungsstarke Simulatoren zur Verfügung. Drittens interessiert man sich in der Regelungstechnik nur für das Verhalten eines Systems und nicht für dessen physikalische Eigenheiten. Video: Resonanz [3] Modellbildung Die Systemdynamik ermöglicht eine intuitive Modellbildung. Ausgehend von der Mengenbilanz fügt man die konstitutiven Gesetze ein und verbindet das Ganze zu einem Wirkkreis, was dann mathematisch zu einer Differentialgleichung führt. Konkret berechnet man aus den Speichern die Potentiale und daraus dann wiederum die Stromstärken. Diese Methode, die auch oft Analogien benutz, hat auch ihre Grenzen. So muss die Kausalität immer festgelegt sein und es dürfen keine zirkuläre Abhängigkeiten(circular reference, algebraic loop) formuliert werden. Auch sind die Analogien nicht immer offensichtlich. Dementsprechend kann man nicht unbesehen Resultate von einem Gebiet ins andere übertragen. Nehmen wir als Beispiel den elektrischen Schwingkreis mit Kondensator, Widerstand und Induktivität in Reihe. Die entsprechende mechanische Anordnung sind Körper mit Feder und Dämpfer in Reihe. Damit das System geschlossen ist (keine Impulsaustausch mit der Erde), nehmen wir zwei frei bewegliche Gleiter einer Luftkissenbahn mit Feder und Dämpfer im selben Impulsfluss (siehe Video Schwingkreis: Analogie und Dualität). 5 Dynamische Systeme höherer Ordnung 6 Modell Zuerst zur Modellanalogie Element elektrisch mechanisch Bemerkung Kapazität Gesamtladung des Kondensators ist null Widerstand Dämpferkonstante k entspricht einem Leitwert Induktivität Federkonstante D entspricht einer reziproken Induktivität Die Serieschaltung von zwei Stromgliedern ist mit einem systemdynamischen Tool nicht ganz einfach zu modellieren (deshalb sind die Simulatoren für elektrische Netzwerke anders programmiert). Dazu muss die Kausalität des Widerstandselementes umgedreht werden, d.h. der Strom (Impulsstrom) bestimmt die Spannung (Geschwindigkeitsdifferenz) und diese muss vom kapazitiv berechneten Wert abgezogen werden. Video: Analogie und Dualität [4]. Verhalten im Zeitbereich Nun übersetzen wir die Berechnungsformel für die Kreisfrequenz des nicht gedämpften Oszillators und die Abklingzeit von der Elektrizitätslehre in die Mechanik Dann gilt für die Kreisfrequenz des gedämpften Oszillators Die Kreisfrequenz ist gleich null, wenn die Dämpferkonstante gleich der Hälfte der Wurzel aus Masse mal Federkonstante ist (bitte nachrechnen; die ganze Analyse wäre mit komplexen Zahlen etwas übersichtlicher). Zur Analyse der Resultate sollte man zuerst die Strom- und Potentialgrössen darstellen, also Kraft und Geschwindigkeit. Zur Kontrolle kann man dann noch das Zeitverhalten der gespeicherten Energie beiziehen. Bei mechanischen Schwingkreisen sind Dämpfer und Feder meist parallel statt wie hier in Reihe geschaltet, es liegt dann eine duale Analogie vor. Phasenraum Statt alle Grössen als Funktion der Zeit darzustellen, kann man auch zwei Zustandgrössen (Topfgrössen in der Systemdynamik) gegeneinander auftragen. Man erhält dann eine Phasenraumdarstellung. In der Translationsmechanik spannen Impuls und Ort den Phasenraum auf. Die untenstehenden Bilder zeigen das Grundmodell des mechanischen Serie-Schwingkreises, die zugehörige Energieebene, das Geschwindigkeits- und das Impulsstromstärke-Zeit-Diagramm bei kritischer Dämpfung sowie die Phasenraumdarstellung für einen Körper bei drei verschiedenen Dämpfungen (unterkritisch bis kritisch). Systeme höherer Ordnung Die Ordnung eines Systems ist durch die Zahl der unabhängigen Integrationen gegeben (zwei in Reihe geschaltete Kapazitäten oder Induktivitäten ergeben nur eine Ordnung). Weil sowohl Kapazität als auch Induktivität Energie speichern, darf die Ordnung auch durch die Zahl der unabhängigen Energiespeicher ausgedrückt werden. Das Verhalten nichtlinearer Systeme (Blasenspeicher, Teller- oder Elastomerfedern, nichtlineare Dämpfer) kann in der Nähe eines Arbeitspunktes linearisiert werden. Dieses Verfahren wird oft in der Regelungstechnik angewendet, weil Dynamische Systeme höherer Ordnung 7 man dem System nicht erlaubt, sich allzu weit von gewissen Zuständen zu entfernen. Federn sollte man aber nur dann als Induktivitäten behandeln, wenn deren Verhalten näherungsweise linear ist und die Analogie mit elektrischen oder hydraulischen Systemen gesucht wird. Ansonsten beschreibt man diese Elemente mit der Kraft-Verformungs-Funktion bzw. der Drehmoment-Verdrehungs-Funktion. Die folgende Tabelle führt nochmals analoge Grössen auf Grösse Elektrodynamik Hydrodynamik Translation Rotation Menge elektrische Ladung Volumen Impuls Drehimpuls Stromstärke elektrischer Strom Volumenstrom Kraft Drehmoment Potential Spannung Druck Geschwindigkeit Winkelgeschwindigkeit Extensum Spannungsstoss Druckstoss Ort Winkel Prozessleistung Ein Spannungsstoss (Integral der Spannung über die Zeit oder Fläche unter der Spannungs-Zeit-Kurve) ist oft die Folge einer magnetischen Flussänderung. Kraft oder Drehmoment sind Impuls- bzw. Drehimpulsstromstärken bezüglich eines Körpers. Wird eine Feder von einem Impulsstrom durchflossen, kann man die zugehörige Stromstärke am Ein- oder Ausgang messen. So erhält man die beiden Kräfte, welche die Feder im Gleichgewicht halten. Systeme n-ter Ordnung werden mit einer Differentialgleichung der entsprechenden Ordnung beschrieben. Bei linearen, zeitinvarianten Systemen führt dies zu einer Differentialgleichung n-ter Ordnung mit konstanten Koeffizienten. Solche Systeme lassen sich auch und in gewissem Sinne anschaulicher mit n Differentialgleichungen erster Ordnung beschreiben. Die Systemphysik erlaubt eine direkte Modellierung mechanischer Systeme mittels Gleichungen erster Ordnung. Die Impulsbilanz bzw. die Drehimpulsbilanz liefert so für jedes System und jede Komponente eine Gleichung, die zugehörige Kinematik steuert dann die zweite Gleichung bei. Die meisten Modelle, die Sie mit BerkeleyMadonna aufgebaut haben, erzeugen solche Gleichungen. So gesehen haben Sie ab erster Woche in der Zustandsraumdarstellung modelliert. Kontrollfragen 1. Ein Körper schwingt an einer Feder auf und ab. Wie gross ist die Schwingungsdauer, wenn Masse und Federkonstante bekannt sind? 2. Zwei Schwungräder, die über eine elastische Welle miteinander verbunden und reibungsfrei gelagert sind, schwingen gegeneinander. Wie berechnet man die Winkelrichtgrösse (Drehfederkonstante der Welle) aus Schwingungsdauer und den beiden Massenträgheitsmomenten? 3. Wie gross muss der Widerstand in einem elektrischen Schwingkreis (Kapazität C, Induktivität L) gewählt werden, damit der Strom kritisch gedämpft abklingt? 4. Ein gefedertes Fahrzeug belastet die vier Räder gleichmässig. Wie berechnet man die Dämpferkonstante für die kritische Dämpfung aus der Masse des Fahrzeugs und der Konstante für die Federung eines Rades (lineares Verhalten vorausgesetzt)? 5. Um einen geraden Stahldraht um eine halbe Umdrehung zu verdrehen, muss man einen Drehimpulsstrom der Stärke 5 Nm durchfliessen lassen. Nun hängt man den Draht an der Decke auf und befestigt am unteren Ende einen Körper. Wie gross ist dessen Massenträgheitsmoment, wenn er für eine volle Drehschwingung 0.8 s benötigt? 6. Zwei Schwungräder sind über eine elastische Welle miteinander verbunden. Zeichnen Sie ein elektrisch analoges Schaltbild unter der Annahme, dass die Reibung in beiden Lagern proportional zu Winkelgeschwindigkeit ist. 7. Ein Körper liegt auf einem Feder-Dämpfer-System (parallel geschaltet) auf. Skizzieren Sie die elektrisch analoge Schaltung. Nun fügen sie in diesem Schaltbild eine Wechselspannungsquelle ein und überliegen sich, wie das Dynamische Systeme höherer Ordnung 8 mechanische Analogon aussehen müsste. Antworten zu den Kontrollfragen 1. Schwingungsdauer 2. Schwingungsdauer also gilt 3. Kritische Dämpfung tritt ein, wenn die Kreisfrequenz null ist, wenn gilt . Somit gilt für den Widerstand bei kritischer Dämpfung 4. Übersetzen wir die Formel für die kritische Dämpfung vom elektrischen auf den mechanischen Schwingkreis (die Dämpferkonstante entspricht einem reziproken Widerstand, also einem Leitwert, die Federkonstante der reziproken Induktivität und die Masse der Kapazität). Nun verteilt sich der Impulsstrom zwischen Fahrzeug und Erde auf vier identische Stromglieder. Also ist nur ein Viertel der Masse zu nehmen 5. 6. Zwei Kondensatoren einseitig geerdet mit Induktivität in erster Verbindung und zwei Widerständen in der zweiten Verbindung. Ein Punkt zwischen den beiden Widerständen ist geerdet. 7. Kondensator und Wechselspannungsquelle einseitig geerdet. Induktivität und Widerstand parallel mit den andern beiden Enden von Kondensator und Wechselspannungsquelle verbunden. Mechanische Anregung erfolgt vom Boden her. Das ist ein einfaches Modell für ein Auto, das über Bodenwellen fährt. Die Gewichtskraft wäre als Konstantstromquelle zu modellieren, was aber keinen Einfluss auf die Dynamik hat. Physik und Systemwissenschaft in Aviatik 2014 Quellennachweise [1] [2] [3] [4] https:/ / www. youtube. com/ watch?v=VkXZL-VAKxs https:/ / www. youtube. com/ watch?v=q1MuIE-TQDk https:/ / www. youtube. com/ watch?v=BF1Wn40WlJk https:/ / www. youtube. com/ watch?v=q1MuIE-TQDkSchwingkreis: Quelle(n) und Bearbeiter des/der Artikel(s) Quelle(n) und Bearbeiter des/der Artikel(s) Dynamische Systeme höherer Ordnung Quelle: http://systemdesign.ch/index.php?oldid=12107 Bearbeiter: Admin, KP14, Systemdynamiker 9