Elektromagnetische Feldtheorie Vorlesungsskript
Werbung

Lehrstuhl für Technische Elektrophysik
Technische Universität München
Elektromagnetische Feldtheorie
Vorlesungsskript
Prof. Dr. G. Wachutka
20. Oktober 2011
Inhaltsverzeichnis
3
Inhaltsverzeichnis
1 Klassische Kontinuumstheorie des Elektromagnetismus
1.1 Maxwellsche Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Energie von elektromagnetischen Feldern . . . . . . . . . . . . . . . . . .
1.2.1 Elektrische Energiedichte . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Magnetische Energiedichte . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Allgemeine Bilanzgleichung . . . . . . . . . . . . . . . . . . . . .
1.2.4 Energiebilanz des elektromagnetischen Feldes . . . . . . . . . . .
1.3 Potentialdarstellung des elektromagnetischen Feldes . . . . . . . . . . . .
1.3.1 Elektromagnetisches Vektor- und Skalarpotential . . . . . . . . .
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung . . . . . . . . .
1.4 Feldverhalten an Materialgrenzen . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Grenzflächenbedingung für die normalen Feldkomponenten . . . .
1.4.2 Grenzflächenbedingungen für die tangentialen Feldkomponenten .
1.5 Das Randwertproblem der Potentialtheorie . . . . . . . . . . . . . . . . .
1.5.1 Das RWP der Elektrostatik . . . . . . . . . . . . . . . . . . . . .
1.5.2 Klassifikation der Potential-Randwertprobleme . . . . . . . . . . .
1.5.2.1 Dirichletsche Randbedingung . . . . . . . . . . . . . . .
1.5.2.2 Neumannsche Randbedingung . . . . . . . . . . . . . . .
1.5.2.3 Gemischtes Randwertproblem . . . . . . . . . . . . . . .
1.5.3 Analytische Lösungsverfahren für die Poissongleichung . . . . . .
1.5.3.1 Orthogonalentwicklung nach Eigenfunktionen des LaplaceOperators . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3.2 Lösung mittels Greenfunktion . . . . . . . . . . . . . . .
1.5.3.3 Konstruktion der Greenfunktion mit Hilfe der Spiegelladungsmethode . . . . . . . . . . . . . . . . . . . . . . .
1.5.4 Stationäre Stromverteilung . . . . . . . . . . . . . . . . . . . . . .
1.5.4.1 Bilanz- und Transportgleichungen für elektrische Strömungsverteilungen . . . . . . . . . . . . . . . . . . . . .
1.5.4.2 Stationäre Strömungsfelder im Drift-Diffusions-Modell .
1.5.4.3 Stationäre Strömungsfelder im Ohmschen Transportmodell
1.5.4.4 Randwertproblem für stationäre Ohmsche Strömungsfelder
1.5.5 Korrespondenz . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Modellierung elektromagnetischer Vorgänge in technischen Systemen
Kompaktmodellen
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen Netzwerken . . . .
2.1.1 Generelle Modellannahmen . . . . . . . . . . . . . . . . . . . .
2.1.2 Feldtheoretische Beschreibung der Quasistationarität . . . . .
7
7
9
9
12
15
18
20
20
22
25
25
28
32
32
36
36
38
39
43
43
46
49
54
54
56
56
57
58
mit
61
. . 61
. . 61
. . 62
4
Inhaltsverzeichnis
2.1.3
Synthese von Netzwerkmodellen aus funktionalen Blöcken . . . . 63
2.1.3.1 Funktionale Blöcke . . . . . . . . . . . . . . . . . . . . . 63
2.1.3.2 Erstellung eines Kirchhoffschen Netzwerkes . . . . . . . 64
2.1.3.3 Kirchhoffsche Knotenregel . . . . . . . . . . . . . . . . . 66
2.1.3.4 Kirchhoffsche Maschenregel . . . . . . . . . . . . . . . . 68
2.2 Kapazitive Speicherelemente . . . . . . . . . . . . . . . . . . . . . . . . . 69
2.2.1 Kondensatoranordnungen (Geometrie und Randwertproblem) . . 69
2.2.2 Maxwellsche Kapazitätsmatrix . . . . . . . . . . . . . . . . . . . . 70
2.2.2.1 Beziehung zwischen Elektrodenladungen und -potentialen 70
2.2.2.2 Darstellung der gespeicherten elektrischen Energie . . . 72
2.2.2.3 Teilkapazitätskoeffizienten . . . . . . . . . . . . . . . . . 77
2.3 Induktive Speicherelemente (Spulen, Drosseln) . . . . . . . . . . . . . . . 78
2.3.1 Spulenanordnungen (Geometrie und Topologie) . . . . . . . . . . 78
2.3.2 Induktionskoeffizienten . . . . . . . . . . . . . . . . . . . . . . . . 80
2.3.3 Zusammenhang mit der magnetischen Feldenergie . . . . . . . . . 83
2.4 Niederfrequente Wechselstromnetzwerke . . . . . . . . . . . . . . . . . . 86
2.4.1 Grundlegende Begriffe der Wechselstromlehre . . . . . . . . . . . 87
2.4.1.1 Wechselspannungsgenerator . . . . . . . . . . . . . . . . 87
2.4.1.2 Zeigerdarstellung . . . . . . . . . . . . . . . . . . . . . . 89
2.4.2 Wechselstromschaltungen mit linearen Bauelementen . . . . . . . 94
2.4.2.1 Lineare Wechselstrom-Bauelemente . . . . . . . . . . . . 94
2.4.2.2 Elementare Beispiele für lineare Wechselstrombauelemente 95
2.4.2.3 Kirchhoffsche Regeln für Wechselstromschaltungen . . . 99
2.4.2.4 Einfache Grundschaltungen aus R, L, C . . . . . . . . . 100
2.4.2.5 Zusammenfassung zu Wechselstromschaltungen . . . . . 107
2.4.3 Leistung und Effektivwerte . . . . . . . . . . . . . . . . . . . . . . 108
2.4.3.1 Momentane Leistung . . . . . . . . . . . . . . . . . . . . 108
2.4.3.2 Effektivwerte, Wirkleistung . . . . . . . . . . . . . . . . 109
2.4.3.3 Leistungsbilanz bei energiespeichernden Bauelementen . 112
2.4.3.4 Scheinleistung und Blindleistung . . . . . . . . . . . . . 115
3 Elektromagnetische Wellen in homogenen Medien
3.1 Grundlegende Aspekte . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Modellannahmen . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Differentialgleichungen für Wellen . . . . . . . . . . . . . . .
3.1.3 Wellengleichung für das elektromagnetische Viererpotential .
3.1.4 Physikalischer Mechanismus für EM Wellenausbreitung . . .
3.2 Homogene Wellengleichung in einer Raumdimension . . . . . . . . .
3.2.1 Vereinfachende Modellannahmen . . . . . . . . . . . . . . .
3.2.2 Grundlösungen . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Ebene Wellen in R3 . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Grundlösungen der vektoriellen Wellengleichung in R3 . . . .
3.3.2 Ebene eletromagnetische Wellen . . . . . . . . . . . . . . . .
3.3.3 Energiedichte und Leistungsfluss ebener EM-Wellen . . . . .
3.3.4 Harmonische ebene elektromagnetische Wellen im 3D-Raum
3.3.4.1 Linear polarisierte harmonische EM-Wellen . . . .
3.3.4.2 Elliptisch polarisierte harmonische EM-Wellen . . .
3.3.4.3 Komplexe Darstellung harmonischer EM-Wellen . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
119
119
119
120
122
123
124
124
125
128
128
131
133
135
135
137
138
Inhaltsverzeichnis
3.3.5
3.3.6
3.3.7
5
Darstellung beliebiger EM-Wellen durch harmonische ebene Wellen 139
Grundgleichungen in Fourierdarstellung . . . . . . . . . . . . . . . 140
Räumlich gedämpfte ebene EM-Wellen in Leitern . . . . . . . . . 144
7
1 Klassische Kontinuumstheorie des
Elektromagnetismus in materiellen
Medien
1.1 Maxwellsche Gleichungen
Die Grundgleichungen des Elektromagnetismus lassen sich in einem konsistenten System partieller Differentialgleichungen zusammenfassen. Diese werden als „Maxwellsche
Gleichungen“ bezeichnet und lauten:
=ρ
div D
(1.1)
= − ∂B
rot E
∂t
(1.2)
=0
div B
(1.3)
= j +
rot H
∂D
∂t
(1.4)
Die Maxwellschen Gleichungen beschreiben Naturgesetze, die folgende physikalische
Aussagen beinhalten:
• Elektrische Felder werden erzeugt
– von einer elektrischen Ladungsverteilung ρ
(quasi-statisch, Gl. (1.1))
– oder durch ein schnell zeitveränderliches Magnetfeld
(magnetische Induktion, Gl. (1.2))
∂B
∂t
8
1.1 Maxwellsche Gleichungen
• Magnetische Felder werden erzeugt
– durch eine elektrische Stromverteilung j
(quasi-statisch, Gl. (1.4))
– oder durch ein schnell zeitveränderliches elektrisches Feld
(Verschiebungsstrom =
ˆ „elektrische Induktion“, Gl.(1.4))
∂D
∂t
• Durch das Faradaysche Induktionsgesetz (1.2) und das Ampère-Maxwellsche Gesetz (1.4) werden das elektrische Feld und das magnetische Feld in ihrer Zeit und H
als
und Ortsabhängigkeit eng miteinander verkoppelt. Man fasst daher E
,H
) auf, die
die beiden Komponenten einer einzigen physikalischen Feldgröße (E
als „elektromagnetisches Feld“ bezeichnet wird. Nur im Falle rein statischer
∂D
∂B
= 0 und
= 0 gilt, sind die „elektrische Welt“ und die „maFelder, wenn
∂t
∂t
gnetische Welt“ entkoppelt, und nur dann macht es Sinn, das elektrische und das
magnetische Feld als unabhängige Feldgrößen zu behandeln.
Damit die Maxwellschen Gleichungen ein geschlossenes Differentialgleichungssystem für
, H
) ergeben, müssen sie noch um die sogenannten
das elektromagnetische Feld (E
Materialgleichungen ergänzt werden. In ihrer einfachsten Forn lauten diese:
= E
D
(1.5)
= μH
B
(1.6)
j = σ E
(1.7)
Diese Gleichungen sind keine Naturgesetze, sondern phänomenologische Modellgleichungen mit einem beschränkten Gültigkeitsbereich, der sich aus den zugrundeliegenden Modellannahmen ergibt (elektrisches Polarisationsmodell, Magnetisierungsmodell,
Ohmsches Driftmodell usw.)
Das System (1.1) - (1.7) ist auf einem Gebiet Ω ⊂ E3 zu lösen. Nach entsprechender
,H
.
Substitution und Elimination ergibt sich ein geschlossenes System für E
Nach Vorgabe von passend gewählten Randwerten auf ∂Ω und Anfangsbedingungen für
t = t0 sind hierdurch alle elektromagnetischen Vorgänge vollständig bestimmt.
9
1.2 Energie von elektromagnetischen Feldern
1.2.1 Elektrische Energiedichte
(i) Die elektrische Energie Wel , die im elektrischen Feld einer diskreten Ladungsverteilung (qi , r i )i=1, ..., N gespeichert ist, ist gleich der elektrischen Arbeit, die
zum Aufbau dieser Ladungsverteilung geleistet werden muss, indem die Ladungen
q1 , q2 , . . . , qN sukzessive aus dem Unendlichen an ihre Positionen r 1 , r 2 , . . . , r N
gebracht werden. Um die k-te Ladung qk im elektrischen Feld der bereits in Position gebrachten Ladungen q1 , . . . , qk−1 an die Stelle rk zu bewegen, muss die
Arbeit
qi
1 k−1
(k)
ΔWel = qk ·
4π i=1 |r k − r i |
geleistet werden. Für die gesamte Arbeit ergibt sich dann:
Wel =
N
k=2
(k)
ΔWel =
N
i<k
i,k=1
N
1
qk qi
1 1 qk qi
=
4π |r k − r i |
2 4π i=k |r k − r i |
(1.8)
i,k=1
(ii) Die elektrische Energie, die im elektrischen Feld einer kontinuierlichen Ladungsverteilung ρ(r ) gespeichert ist, lässt sich aus Gl. (1.8) dadurch ableiten, dass man
ρ(r ) durch eine quasikontinuierliche, diskrete Ladungsverteilung (qi , r i )i=1, ..., N
approximiert, welche für N → ∞ gegen ρ(r ) konvergiert:
→
(qi , r i )i=1, ..., N
ρ(r )
Hierbei wird qi um einen Punkt ri so „verschmiert“, dass die im Volumen d3 r um
den Punkt ri enthaltene Ladung dQi (r) gleich qi ist:
qi = dQi (ri ) = ρ(ri ) d3 r
Hieraus ergibt sich für N → ∞ die folgende Substitutionsregel:
N
i=1
{. . . , r i , . . .} qi
→
{. . . , r , . . .} ρ(r ) d3 r
V
wobei das Gebiet V ⊂ E3 so gewählt wird, dass ρ(r ) außerhalb von V verschwindet.
Angewandt auf die Doppelsumme in Gl. (1.8) ergibt sich damit das Doppelintegral
1 ρ(r )ρ(r ) 3 3 d rd r
Wel =
8π
|r − r |
(1.9)
V V
(iii) Die elektrische Energie wird nach Gl. (1.9) als Funktional der Feldquellen ρ(r)
dargestellt, also Wel = Wel [ρ]. Wir wollen Wel nun direkt durch die Feldgrößen
(r ) und D
(r ) selbst ausdrücken, was zunächst nur in differentieller Form gelingt.
E
10
1.2 Energie von elektromagnetischen Feldern
Einer kleinen Änderung der felderzeugenden Ladungsdichte
ρ(r ) → ρ(r ) + δρ(r )
entspricht eine kleine Änderung δWel [ρ, δρ] der Feldenergie, die bezüglich δρ linear
approximiert werden kann. Hierzu betrachtet man
F (α) := Wel [ρ + αδρ]
für α ∈ R
und definiert die 1. Variation von Wel bezüglich δρ als
d
δWel [ρ, δρ] :=
Wel [ρ + αδρ]
dα
α=0
(1.10)
Damit gilt:
dF Wel [ρ + δρ] = F (1) = F (0) +
· 1 + O δρ2
dα α=0
d
= Wel [ρ] +
+ O δρ2
Wel [ρ + αδρ]
dα
α=0
= Wel [ρ] + δWel [ρ; δρ] + O δρ2
Die explizite Berechnung der differentiellen Änderung der elektrischen Feldenergie
ergibt:
⎞
⎛
d ⎝ 1 1 (ρ(r ) + αδρ(r ))(ρ(r ) + αδρ(r )) 3 3 ⎠
d rd r δWel =
dα 2 4π
|r − r |
V V
1 1
=
2 4π
d
dα
V V
(ρ(r ) + αδρ(r ))(ρ(r ) + αδρ(r ))
|r − r |
α=0
d3 r d3 r
α=0
1 1 ρ(r ) δρ(r ) δρ(r ) ρ(r )
=
d3 r d3 r
+
2 4π
|r − r |
|r − r |
V V
=
V
⎛
1
⎝
4π
V
⎞
ρ(r ) 3 ⎠
δρ(r ) d3 r =
dr
|r − r |
Φ(r ) δρ(r ) d3 r
V
elektrostatisches Potential Φ(r )
Hierbei ist Φ(r ) das von der Ladungsverteilung ρ(r ) erzeugte Coulomb-Potential.
Die differentielle Änderung von Wel lautet also
δWel =
V
Φ(r ) δρ(r ) d3 r
(1.11)
1.2.1 Elektrische Energiedichte
11
bzw. D
ausdrücken:
(iv) Nun können wir δWel durch die Feldgrößen E
gemäß
• δρ verursacht nach dem Gaußschen Gesetz eine Änderung δ D
div δ D = δρ.
genügt E
= −∇Φ.
• E
• δρ sei eingeschlossen in einer Kugel K(0 , R).
Damit folgt:
(r ) d3 r
Φ(r ) div δ D
δWel =
K(0 ,R)
=−
K(0 ,R)
(r ) d3 r +
grad Φ(r ) · δ D
−E(r )
∂K(0 ,R)
(r ) da
Φ(r ) δ D
∼
1
1 ∼ R2
∼ 2
R
R
Für R → ∞ erhält man damit:
δWel =
· δD
d3 r
E
(1.12)
R3
(v) Dieses Ergebnis lässt sich folgendermaßen interpretieren:
Wir nehmen an, das elektrische Feld trägt eine Energiedichte wel (r ) mit sich, aus
der sich die gesamte Feldenergie durch Integration berechnen lässt:
Wel =
wel (r ) d3 r
R3
Für die 1. Variation folgt dann:
δWel =
δwel (r ) d3 r
R3
→
(D
). Dann ergibt sich
Nehmen wir weiter an, es gebe ein Materialgesetz D
E
durch Vergleich mit Gl. (1.12):
· δD
δwel = E
(1.13)
12
1.2 Energie von elektromagnetischen Feldern
ist die lokale differentielle Änderung der Energiedichte des elektrischen Feldes und
D
wel =
0
(D
) · dD
E
(1.14)
-D
-Raum
Wegintegral im E
ist die (lokale) Energiedichte des elektrischen Feldes.
= E
, = const., ergibt sich durch
(vi) Im Falle eines streng linearen Dielektrikums D
Integration
D
wel =
0
⎡
1 = 1⎢
D · dD
⎣
=
Dx
0
Dx dDx +
Dy
Dy dDy +
0
Dz
⎤
⎥
Dz dDz ⎦
0
1
(D2 + Dy2 + Dz2 )
2 x
das einfache Ergebnis
wel =
1 2
2 1 = E ·D
D = E
2
2
2
(1.15)
1.2.2 Magnetische Energiedichte
(i) Die magnetische Energie Wmag , die im Magnetfeld einer Stromverteilung gespei
∂D
chert ist, kann wegen des Verschiebungsstroms
im Ampèreschen Gesetz (1.4)
∂t
-Feld betrachtet werden. Wir
nicht entkoppelt von der elektrischen Energie im D
leiten daher die magnetische Energiedichte aus einer Leistungsbilanz für das gekop ,H
) her. Ausgangspunkt ist die externe Leistung,
pelte elektromagnetische Feld (E
die dem elektromagnetischen System zugeführt werden muss, um eine Stromverteilung aufzubauen und aufrechtzuerhalten.
(ii) Wir betrachten zunächst diskrete Ladungen qk , die sich auf Bahnkurven rk (t) mit
der Geschwindigkeit v k (t) bewegen. Die zugeführte Leistung wird einer mechanischen Energiequelle entnommen, die die Ladungen im elektromagnetischen Feld
1.2.2 Magnetische Energiedichte
13
bewegt. Die Zufuhr an elektromagnetischer Leistung beträgt:
Pelmag = −
=−
N
k=1
N
F k (r k ) · v k
qk
(r k )+ v k × B
(r k ) · v k
E
k=1
=−
N
0
(r k ) (= − mechanische Leistung)
qk vk · E
(1.16)
k=1
(iii) Im Falle einer kontinuierlichen Stromverteilung j (r ) = ρ(r )v (r ) benutzen wir
wieder die Substitutionsregel
N
{. . . , r k , . . .} qk
→
k=1
{. . . , r , . . .} ρ(r ) d3 r
V
und erhalten aus Gl. (1.16)
Pelmag = −
(r ) d3 r
ρ(r )v (r ) · E
V
woraus folgt:
Pelmag = −
(r ) d3 r
j (r ) · E
(1.17)
V
Bemerkung: Ist die Stromverteilung aus verschiedenen Trägersorten zusammengesetzt, ergibt sich dasselbe Ergebnis.
= j + ∂ D kann nun j aus Gl. (1.17) eli(iv) Mit Hilfe des Ampèreschen Gesetzes rot H
∂t
/B
und E
/D
dargestellt
miniert werden und Pelmag allein durch die Feldgrößen H
werden:
3
· ∂ D d3 r
Pelmag = − rot H · E d r +
(1.18)
E
∂t
V
V
V
dWel
∂wel 3
dr=
∂t
dt
dWel
ist die Änderung des rein elektrischen Energieinhalts. Demnach muss die zu
dt
dWmag
enthalten sein
bestimmende Änderung des magnetischen Energieinhalts
dt
14
1.2 Energie von elektromagnetischen Feldern
im Term:
−
!
·E
d3 r =
rot H
V
V
∂wmag 3
d r + Energiefluss aus System durch Berandung ∂V
∂t
dWmag
dt
Für die weitere Umformung benötigen wir die Beziehung
×H
) = ∇ · (E
×H
)
div(E
)·H
− (∇ × H
)·E
= (∇ × E
=−
∂B
− rot H
·E
·H
∂t
= − ∂ B benutzt wird.
wobei das Induktionsgesetz rot E
∂t
Damit folgt unter Verwendung des Gaußschen Integralsatzes:
−
·E
d3 r =
rot H
V
V
=
V
∂B
3
×H
) d3 r
· H d r + div(E
∂t
V
· ∂ B d3 r +
×H
da
H
E
∂t
∂V
Wählt man für das Gebiet V eine Kugel K(0 , R) um den Ursprung mit Radius R
und lässt R → ∞ gehen, so lässt sich mit Gl. (1.18) die zugeführte elektromagnetische Leistung Pelmag als Summe von drei Termen darstellen:
Pelmag
∂D
3
d r+
= E·
∂t 3
R
R3
∂wel
∂t
dWel
dt
∂B
3
×H
) · da
d r + lim
H ·
(E
R→∞
∂t
|
r |=R
∂wmag
∂t
dWmag
dt
(1.19)
Der erste Term ist nach Gl. (1.12) die Zeitableitung der elektrischen Feldenergie
dWel
, der analog dazu gebildete zweite Term ist als zeitliche Änderung der gedt
dWmag
zu interpretieren, und der dritte Term
suchten magnetischen Feldenergie
dt
beschreibt den Leistungsfluss durch die Kugeloberfläche ∂K(0 , R) nach außen (vgl.
Abs. 1.2.4) im Limes R → ∞. Er lässt sich folgendermaßen abschätzen:
Für lokalisierte Ladungen und Ströme gilt für das asymptotische Verhalten der
erzeugten Felder
|∼ 1
| ∼ 1 und |H
|E
n
R
Rm
1.2.3 Allgemeine Bilanzgleichung
15
mit n = 2 und m = 3 im quasistatischen Fall und n = m = 1 im dynamischen Fall
(Wellenausbreitung, siehe Kap. 3). Die Oberfläche von ∂K(0 , R) wächst mit R2 ;
daher folgt
lim
R→∞
|
r |=R
×H
E
da =
⎧
⎪
⎪
⎪
0 (quasistatischer Fall)
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎩
total abgestrahlte Leistung (dynamischer Fall)
(v) Aus Gl. (1.19) lassen sich damit folgende Schlüsse ziehen:
Die differentielle Änderung der gesamten magnetischen Feldenergie beträgt
δWmag =
(r ) · δ B
(r ) d3 r
H
(1.20)
R3
Die differentielle Änderung der Energiedichte des magnetischen Feldes ist
· δB
δwmag = H
(1.21)
woraus sich die Energiedichte des magnetischen Feldes ergibt als
B
wmag =
0
(B
) · dB
H
(1.22)
-B
-Raum
Wegintegral im H
= μH
; μ = const.,
(vi) Im Falle eines streng linearen magnetisierbaren Materials mit B
ergibt sich durch Integration
H
wmag = μ
0
=μH
2=1H
·B
= 1B
2
· dH
H
2
2
2μ
(1.23)
1.2.3 Allgemeine Bilanzgleichung
(i) Viele Gesetze der Physik lassen sich als Bilanzgleichung für eine extensive physikalische Größe X formulieren. Dies ist eine Größe, die eine Volumendichte
x(r , t) dergestalt besitzt, dass zu jedem beliebigen räumlichen Gebiet V ⊂ E3
16
1.2 Energie von elektromagnetischen Feldern
(Kontrollvolumen) der in V enthaltene Mengeninhalt X(V ) als Integral
X(V ) =
x(r , t) d3 r
V
bestimmt werden kann.
Beispiele für extensive Größen sind
Größe
X
Volumendichte x
Ladung
Q
Ladungsdichte
ρel
Masse
M
Massendichte
ρM
Teilchenzahl N
Konzentration
n
Energie
Energiedichte
w(el,mag)
W(el,mag)
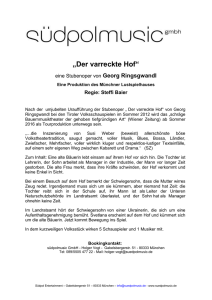
(ii) Die extensive Größe X besitze eine Stromdichte J X (r , t). Diese hat die Eigen da
schaft, dass für eine gegebene differentielle, orientierte Kontrollfläche da = N
das Skalarprodukt J X · da diejenige Menge der Größe X angibt, die pro Zeiteinheit die Kontrollfläche in Normalenrichtung passiert.
r
da
r
JX
V
r r
da = N da
¶V
r
JX
Abbildung 1.1: Fluss der extensiven Größe X durch ein Kontrollvolumen
Die aus einem Kontrollvolumen V durch seine geschlossene Oberfläche ∂V pro
Zeiteinheit nach
außen strömende Menge der Größe X ist dann gegeben durch das
Flussintegral J X · da .
∂V
(iii) Die extensive Größe X besitze eine Produktionsrate ΠX (r , t), die angibt, welche
Menge der Größe X pro Volumeneinheit und Zeiteinheit erzeugt oder vernichtet
wird. ΠX > 0 bedeutet Erzeugung, ΠX < 0 bedeutet Vernichtung von X.
1.2.3 Allgemeine Bilanzgleichung
17
(iv) Die im Volumen V enthaltene Menge X(V ) kann sich nur dadurch ändern, dass
entweder ein Zufluss (oder Abfluss) durch die Hüllfläche ∂V erfolgt, oder dass
innerhalb von V eine Erzeugung (oder Vernichtung) stattfindet.
Damit gilt die Bilanzgleichung in integraler Form
dX(V )
= − J X da + ΠX d3 r
dt
(1.24)
V
∂V
Das negative Vorzeichen beim Flussintegral kommt daher, dass
J X · da > 0
∂V
einen Netto-Abfluss bezeichnet, was einer Abnahme von X(V ) entspricht.
(v) Die zeitliche Änderung von X(V ) lässt sich durch die Volumendichte x(r , t) ausdrücken:
dX(V )
∂x
d x(r , t) d3 r =
=
(r , t) d3 r
dt
dt
∂t
V
V
Eingesetzt in die integrale Bilanzgleichung (1.24) und unter Anwendung das Gaußschen Integralsatzes auf das Flussintegral ergibt sich:
V
∂x
3
3
(r , t) d r = − div J X (r , t) d r + ΠX (r , t) d3 r
∂t
V
V
für jedes beliebige Kontrollvolumen V .
Damit folgt die allgemeine Bilanzgleichung in differentieller Form:
∂x
= − div J X + ΠX
∂t
(1.25)
(vi) Wichtige Beispiele für Bilanzgleichungen im Bereich der Elektrodynamik sind:
• Ladungserhaltung:
Mit (1.1) und (1.4) gilt:
) = div j +
0 ≡ div(rot H
∂D
∂ρ
= div j +
∂t
∂t ∂
= ∂ρ
div D
∂t
∂t
div
Daraus folgt die Ladungserhaltungsgleichung (oder Ladungskontinuitätsgleichung):
0 = div j +
∂ρ
∂t
Die Ladungsgenerationsrate ΠQ verschwindet (ΠQ ≡ 0), weil elektrische Ladungen weder erzeugt noch vernichtet werden können.
18
1.2 Energie von elektromagnetischen Feldern
• Teilchenbilanz im Halbleiter:
Bezeichnen n und p die Teilchendichten der beweglichen Elektronen und Löcher in einem Halbleiter und Jn und Jp die zugehörigen Teilchenstromdichten,
so gilt:
Elektronen:
∂n
= − div J n + Gn
∂t
Löcher:
∂p
= − div J p + Gp
∂t
Die Teilchen-Generations-Rekombinationsraten Gn und Gp sind im allgemeinen nicht Null, weil durch Elektron-Loch-Paarbildung bzw. Rekombination
die Zahl der beweglichen Ladungsträger verändert werden kann. Die Ladungserhaltung wird hierdurch nicht verletzt.
• Energiebilanz für das elektromagnetische Feld
Bezeichnet welmag = wel + wmag die Energiedichte des elektromagnetischen
Feldes, J elmag die zugehörige Leistungsflussdichte und Πelmag die dem Feld
zugeführte Leistungsdichte, so gilt
∂welmag
+ div J elmag = Πelmag
∂t
(1.26)
Im nächsten Abschnitt sollen nun die einzelnen Terme dieser Bilanzgleichung
konkret identifiziert und durch die Feldgrößen ausgedrückt werden.
1.2.4 Energiebilanz des elektromagnetischen Feldes,
Poynting-Vektor
(i) Die zeitliche Änderung der elektrischen und magnetischen Energiedichte ist nach
Gl. (1.13) und (1.21) gegeben als:
∂wel
· ∂D
=E
∂t
∂t
und
∂wmag
· ∂B
=H
∂t
∂t
(1.27)
Damit können wir wegen welmag = wel + wmag den ersten Term in der Energiebilanz
/D
und H
/B
ausdrücken. Desweiteren ist nach Gl. (1.17) die dem
(1.26) durch E
elektromagnetischen Feld zugeführte Gesamtleistung
Pelmag = −
d3 r
j · E
V
woraus sich für die zugeführte Leistungsdichte ergibt:
Πelmag = −j · E
(1.28)
1.2.4 Energiebilanz des elektromagnetischen Feldes
19
(meist tatsächlich negativ, wenn das elektromagnetische Feld in einem Leiter die
> 0 abgibt)
Verlustleistungsdichte j · E
Damit lautet die Energiebilanz des elektromagnetischen Feldes (1.26) nun mehr in
konkreter Form:
· ∂ B + div J elmag = −j · E
· ∂D + H
E
∂t
∂t
∂wel
∂wmag
∂t
∂t
(1.29)
(ii) Um die Leistungsflussdichte J elmag zu identifizieren, berechnen wir unter Verwendung des Induktionsgesetzes (1.2) und des Ampèreschen Gesetzes (1.4) den Ausdruck
×H
div E
·H
−E
· rot H
= −H
· ∂B − E
· ( ∂ D + j )
= rot E
∂t
∂t
Nach Umstellen der Terme erhält man:
×H
= −j · E
· ∂D + H
· ∂ B + div E
E
∂t
∂t
Πelmag
∂welmag
∂t
(1.30)
Der Vergleich mit Gl. (1.29) legt nahe, den Poynting-Vektor
:= E
×H
S
(1.31)
mit der elektromagnetischen Leistungsflussdichte zu identifizieren. Streng genom ×H
) nur folgern, dass
men kann man aber aus der Gleichheit div J elmag = div(E
bis auf ein additives quellenfreies Vektorfeld S
0 übereinstimmen:
J elmag und S
×H
+S
0
J elmag = E
0=0
mit div S
(1.32)
(iii) Ein illustratives Beispiel liefert der Fall, wenn ein elektrostatisches Feld (z.B.
=E
0 = const.) und ein magnetostatisches Feld (z.B. H
=H
0 = const.) von
E
unabhängigen Quellen (d.h. Ladungen und Strömen) erzeugt werden, also völlig
entkoppelt sind. Dann kann der Poynting-Vektor auf einen beliebigen konstanten
0 = 0 eingestellt werden, obwohl die Leistungsflussdichte Jelmag
=E
0 × H
Wert S
überall verschwindet.
Für die integrale und differentielle Energiebilanz ist dies allerdings völlig unerheb-
20
1.3 Potentialdarstellung des elektromagnetischen Feldes
lich, denn
· da =
S
d3 r =
div S
V
∂V
0×H
0 d3 r = 0
div E
V
für jedes Kontrollvolumen V .
=E
×H
kann dann als Leistungsflussdichte interpretiert
Der Poynting-Vektor S
werden, wenn E und H die miteinander gekoppelten Komponenten eines dynamischen elektromagnetischen Feldes bilden, das von einer dynamischen Quelle (z.B.
Sendeantenne) erzeugt wird, bei der dieselben bewegten Ladungen sowohl das E
-Feld erzeugen. Dies ist typischerweise bei elektromagnetischen
Feld als auch das H
Wellen der Fall.
1.3 Potentialdarstellung des elektromagnetischen Feldes
1.3.1 Elektromagnetisches Vektor- und Skalarpotential
(i) Definition und Eigenschaften des Vektorpotentials (allgemein)
(r ) besitzt ein Vek• Ein auf einem Gebiet Ω ⊂ R3 definiertes Vektorfeld U
torpotential V (r ), wenn es ein auf Ω differenzierbares Vektorfeld V (r ) gibt
mit
(r ) = rot V (r )
U
• In diesem Falle gilt:
= div(rot V ) = 0 in Ω
div U
Kurzbeweis mit Nabla-Kalkül: div(rot V ) = ∇ · ∇ × V = 0
• In „sternförmigen“ Gebieten Ω ⊂ R3 gilt auch die Umkehrung
(Satz von Poincaré):
(r ) ist stetig differenzierbar in Ω mit div U
= 0 in Ω
U
= rot V in Ω
⇒ es existiert ein Vektorpotential V (r ) auf Ω mit U
• Das Vektorpotential ist bis auf ein additives Gradientenfeld eindeutig be , so gilt:
stimmt; denn hat man zwei Vektorpotentiale V und V zu U
= rot V = rot V ⇒ rot(V − V ) = 0 in Ω
U
1.3.1 Elektromagnetisches Vektor- und Skalarpotential
21
Folglich ist V − V ein Gradientenfeld, d.h. es existiert ein Skalarfeld χ(r )
auf Ω mit V − V = grad χ(r ).
= rot V haben die Form:
Das heißt, alle Vektorpotentiale zu U
V = V − grad χ(r )
(1.33)
(ii) Elektromagnetisches Vektorpotential:
Die Maxwellsche Gleichung (1.3) besagt:
(r , t) = 0
div B
in R3 × (−∞, ∞)
Damit existiert nach dem Satz von Poincaré ein überall definiertes Vektorfeld
(r , t) mit:
A
(r , t) = rot A
(r , t)
B
(1.34)
heißt elektromagnetisches Vektorpotential.
A
ist durch (1.34) nur bis auf ein additives Gradientenfeld eindeutig bestimmt:
NB: A
und A
:= A
−∇
χ liefern dasselbe B
-Feld. Diese als „Eichfreiheit“ bezeichneA
te Eigenschaft wird benutzt, um das Vektorpotential zusätzliche „Eichbedingungen“
erfüllen zu lassen.
(iii) Skalares elektromagnetisches Potential:
Nach (1.2) gilt:
= − ∂B
rot E
∂t
(1.34)
= −
∂
= − rot ∂ A
rot A
∂t
∂t
+ ∂A ) = 0
⇒ rot(E
∂t
+ ∂ A ein Gradientenfeld; d.h. es existiert ein Skalarfeld Φ(r , t) mit
Damit ist E
∂t
+ ∂ A = − grad Φ
E
∂t
Damit erhält man für das elektrische Feld die Darstellung:
(r , t) = − grad Φ(r , t) − ∂ A (r , t)
E
∂t
(1.35)
Φ heißt elektromagnetisches skalares Potential.
= − grad Φ aus der ElekNB: (1.35) verallgemeinert die Potentialdarstellung E
22
1.3 Potentialdarstellung des elektromagnetischen Feldes
trostatik auf den zeitabhängigen Fall. Daher wird Φ oft auch (schlampigerweise)
elektrisches Potential genannt.
(iv) Eichtransformation:
:= A
−∇
χ „umgeeicht“, so muss auch das
Wird das Vektorpotential gemäß A
skalare Potential transformiert werden, damit (1.35) gültig bleibt:
∂A
∂A
∂χ
∂A
∂
∇Φ +
+
= ∇Φ +
− ∇χ = ∇ Φ −
∂t
∂t
∂t
∂t
∂t
!
= ∇Φ +
∂A
∂t
Daher muss für Φ gelten:
Φ −
∂χ !
= Φ + (const.)
∂t
Wir erhalten damit folgenden Satz:
Die „umgeeichten“ elektromagnetischen Potentiale
(r , t) = A
(r , t) − ∇χ(r , t)
A
(1.36a)
∂χ
(r , t)
∂t
(1.36b)
Φ (r , t) = Φ(r , t) +
- und B
-Feld wie A
und Φ.
liefern für beliebige Eichfunktionen χ(r , t) dasselbe E
Beweis: In (1.34) und (1.35) einsetzen.
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung
(i) Durch Einführen der elektromagnetischen Potentiale Φ, A
Maxwellgleichungen
= 0 und
div B
+
rot E
sind die homogenen
∂B
=0
∂t
aus den gegebenen Quellen, der Laidentisch erfüllt. Zur Berechnung von Φ, A
dungsverteilung ρ und der Stromdichte j , werden die inhomogenen Maxwellgleichungen (1.1) und (1.4) benutzt. Setzt man die Gültigkeit der linearen Materialgleichungen (1.5) und (1.6) voraus, so erhält man durch Einsetzen des Potential-
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung
23
ansatzes (1.34) und (1.35) in die inhomogenen Maxwellgleichungen:
= div E
ρ = div D
= − div (∇Φ) −
− ∂ D = rot 1 rot A
j = rot H
∂t
μ
∂
div A
∂t
⎛
⎞
∂
∂ ⎝ ∂A
⎠
+
(∇Φ) +
∂t
∂t
∂t
Man hat nun ein 4-komponentiges
partielles Differentialgleichungssystem für die
Unbekannten Φ, A bei gegebenen Quellen ρ und j :
div(∇Φ) +
1
rot
rot A
μ
∂
) = −ρ
div(A
∂t
∂Φ
∂ 2A
+
+∇
2
∂t
∂t
(1.37)
= j
(1.38)
und Φ, indem man
Ziel ist nun die Entkopplung dieser Gleichungen bezüglich A
diese zusätzlichen „Eichbedingungen“ unterwirft, die durch eine passende Wahl
der Eichfunktion χ erfüllt werden.
(ii) Lorenzeichung:
• Seien und μ (stückweise) räumlich konstant. Mit einer geeigneten Eichfunktion χ lässt sich die Lorenzeichung
+ μ ∂Φ = 0
div A
∂t
(1.39)
erfüllen.
aus (1.37) eliminieren, und man erhält für das skalare
• Damit lässt sich A
Potential Φ die Wellengleichung
ΔΦ − μ
∂2Φ
ρ
=−
2
∂t
(1.40)
• Um auch Gl. (1.38) zu vereinfachen, berechnen wir
=∇× ∇×A
= ∇(div A
) − ΔA
rot rot A
Weiterhin können wir mit Hilfe der Eichbedingung (1.39) die Größe
∂Φ
aus
∂t
24
1.3 Potentialdarstellung des elektromagnetischen Feldes
(1.38) eliminieren; man erhält so:
2
) − ΔA
+ μ ∂ A + ∇ μ ∂Φ
∇(div A
∂t2
∂t
= j μ
)
−∇(div A
die Wellengleichung:
Daraus folgt nun auch für das Vektorpotential A
− μ
ΔA
∂2A
= −μj
∂t2
(1.41)
Man hat somit eine vollständige Entkoppelung
der Bestimmungsgleichungen
erreicht, die nun beide der
für die elektromagnetischen Potentiale Φ, A
strukturell gleichen Differentialgleichung genügen. Dies spiegelt sich in foldender Kompaktschreibweise wider:
⎛
2
⎞
⎜Φ⎟
⎛
⎞
⎜ρ/⎟
∂
) ⎝ ⎠ = −⎝ ⎠
2
A
μj
∂t Wellenoperator
(Δ − μ
(1.42)
• Drückt man in einem kartesischen Koordinatensystem das Vektorpotential A
T
durch seine kartesischen Komponenten (A1 , A2 , A3 ) aus, so kann man die
vierkomponentige Größe (Φ, A1 , A2 , A3 )T bilden („Viererpotential“). Zudem
kann man ρ und j zu einer „Viererstromdichte“ (ρc, j1 , j2 , j3 )T zusammenfas√
sen (mit c := 1/ εμ). In der Wellengleichung (1.42) werden dann alle vier
Komponenten des Viererpotentials gleich behandelt, und jede Komponente
des Viererstroms ist Quelle für die entsprechende Komponente des Viererpotentials. Diese 4-dimensionale Betrachtungsweise entspricht dem Vorgehen in
der speziellen Relativitätstheorie (4-dimensionale Raum-Zeit).
(iii) Coulombeichung:
Diese Eichung zielt auf eine Zerlegung des elektrischen Feldes in eine quasistatische
und eine hochfrequente wellenartige Komponente.
• Seien , μ (stückweise) räumlich konstant. Mit einer passend gewählten Eichfunktion χ lässt sich die Coulombeichung (oder optische Eichung) erfüllen:
=0
(1.43)
div A
• Mit dieser Eichbedingung vereinfacht sich Gl. (1.37) zur Poissongleichung:
div(∇Φ) = −ρ(r , t)
(1.44)
25
Sie ist instantan bezüglich der Zeit t und sieht formal aus wie im elektrostatischen Fall, obwohl Φ(r , t) das elektromagnetische Skalarpotential ist. Dieses
folgt dem zeitlichen Verlauf der felderzeugenden Ladung ρ(r , t) ohne Verzögerung (ohne „Retardierung“), kann also keine Wellenausbreitung beschreiben.
= 0 vereinfacht sich (1.38) zu:
• Mit der Eichbedingung div A
∂
∂ 2A
ΔA − μ
= −μ j − (∇Φ)
2
∂t
∂t
(1.45)
j t
mit der transversalen
Dies ist eine Wellengleichung für das Vektorpotential A
∂
Stromdichte j t := j − (grad Φ).
∂t
Diese ist divergenzfrei (zum Beweis bilde man die Diverganz von Gl. (1.38)),
stellt also ein reines Wirbelfeld dar, zu dem neben der Stromdichte j auch die
Zeitableitung der Ladungsdichte ρ beiträgt, indem man die Lösung der Poissongleichung (1.44) auf der rechten Seite von (1.45) einsetzt. Die Lösungen
beschreiben die wellenartige Ausbreitung des elektromagnetischen Feldes
A
mit Retardierungseffekt.
1.4 Feldverhalten an Materialgrenzen
Wir nehmen an, dass zwar in zusammenhängenden räumlichen Gebieten die linearen
Materialgesetze (1.5)-(1.7) stückweise gültig sind, dass aber die Materialkoeffizienten
ε, μ und σ entlang von Grenzflächen zwischen benachbarten Gebieten unstetig ihren
Wert ändern. Das elektrische und das magnetische Feld sind dann an diesen Grenzflächen nicht differenzierbar und einzelne ihrer Komponenten sind nicht einmal mehr stetig.
Stattdessen gelten beim Übergang über eine Materialgrenze für die normalen und die
tangentialen Feldkomponenten gewisse Übergangsbedingungen, die im folgenden diskutiert werden.
1.4.1 Grenzflächenbedingung für die normalen Feldkomponenten
(r ) erfülle in benachbarten Gebieten Ω1 und Ω2 aus zwei ver(i) Das Vektorfeld U
1 und 2 die Differentialgleichung:
schiedenen Materialien =γ
div U
mit einer gewissen stetigen und beschränkten Volumendichte γ(r ).
(1.46)
26
1.4 Feldverhalten an Materialgrenzen
= ρ oder div B
= 0.
Beispiele hierfür sind div D
An der Grenzfläche Σ zwischen den beiden Gebieten Ω1 und Ω2 existiere eine
Grenzflächendichte ν(r ) der durch γ(r ) beschriebenen extensiven Größe (ist z.B.
γ = ρ = Raumladungsdichte, so ist ν = σ die Oberflächenladungsdichte). An
nicht differenziert werden und deshalb kann Gl. (1.46)
der Grenzfläche kann U
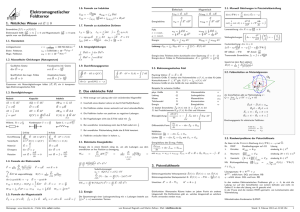
nicht verwendet werden. Stattdessen gilt für ein Kontrollvolumen V , welches die
Grenzfläche Σ schneidet, V ∩ Σ = ∅ (vgl. Abb. 1.2), die integrale Beziehung
· da =
U
γ d3 r +
V
∂V
ν da
(1.47)
V ∩Σ
¶V
W2
V ÇS
W1
S
Abbildung 1.2: Grenzfläche Σ zwischen verschiedenen Materialbereichen und Kontrollvolumen V zur Ableitung der Sprungbedingung
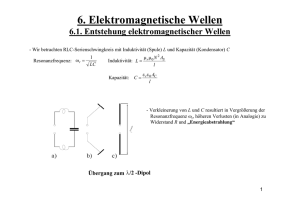
(r 0 ) die Oberflächeneinheits(ii) Für einen Punkt r 0 ∈ Σ auf der Grenzfläche sei N
2 zeigt. Z sei ein kleines zylin1 zum Material normale, die vom Material derförmiges Kontrollvolumen, dessen Stirnflächen A1 und A2 in den Gebieten Ω1
und Ω2 liegen, wobei A1 und A2 kongruent zur Schnittfläche Σ ∩ Z gewählt sind
(vgl. Abb. 1.3). Der Abstand von A1 und A2 sei Δh und entspricht der Höhe des
Zylindermantels M .
Gl. (1.47) hat nun die spezielle Form
A1
· da +
U
· da +
U
A2
· da =
U
M
3
γd r+
Z
ν da
Z∩Σ
Bezeichnet |A| den Flächeninhalt
von Z ∩ Σ,so ist |A1 | = |A2 | = |A|.
· da und γ d3 r; die verbleibenden Integrale
Für Δh → 0 verschwinden U
M
Z
1.4.1 Grenzflächenbedingung für die normalen Feldkomponenten
27
A2
r r
N (r0 )
S
W2
Kontrollvolumen Z
A1
Dh
r
r0 ÎS
W1
Abbildung 1.3: Zylindrisches Kontrollvolumen
ergeben mit Hilfe des Mittelwertsatzes
(r ) · N
(r 0 ) |A| + lim U
(r ) · N
(r 0 )|A| = ν(r 0 )|A|
−U
lim
r →
r
r →
r
0
r ∈Ω1
Mit der Definition
0
r ∈Ω2
(r ) · N
(r 0 )
(r 0 ) := lim U
j ·N
U
r →
r
0
r ∈Ωj
erhalten wir die
für die einseitigen Grenzwerte der Normalkomponenten von U
gesuchte Sprungbedingung
2·N
−U
1·N
= ν auf Σ
U
zeigt von 2
1 nach N
(1.48)
an. Mit
(iii) Wir wenden nun die obige Aussage auf die dielektrische Verschiebung D
=D
, γ = ρ =Raumladungsdichte, ν = σint = Grenzflächenladungsdichte lautet
U
:
die Sprungbedingung für D
2·N
−D
1·N
= σint auf Σ
D
weist von 2 )
1 nach (N
(1.49)
längs Σ ist gleich der GrenzflächenDer Sprung in der Normalkomponente von D
ladungsdichte σint auf Σ.
28
1.4 Feldverhalten an Materialgrenzen
Speziell gilt bei verschwindender Grenzflächenladungsdichte:
1·N
=D
2·N
σint = 0 ⇒ D
auf Σ
ist stetig”
“Normalkomponente von D
Falls
(1.50)
= 0. Es gibt weder
(iv) Die magnetische Induktion erfüllt überall die Bedingung div B
= B
, γ = ν = 0.
eine Volumendichte γ noch eine Grenzflächendichte ν, also U
Damit folgt als Sprungbedingung für B :
1·N
=B
2·N
auf Σ
B
ist stetig”
“Normalkomponente von B
(1.51)
1.4.2 Grenzflächenbedingungen für die tangentialen
Feldkomponenten
(r ) erfülle in benachbarten Gebieten Ω1 und Ω2 aus verschiedenen
(i) Das Vektorfeld U
2 die Differentialgleichung
1 und Materialien = J + V
rot U
(1.52)
mit einer stetigen Flussdichte J und einem beschränkten Vektorfeld V (r ).
= j + ∂ D oder rot E
= 0 − ∂ B .
Beispiele hierfür sind rot H
∂t
∂t
Auf der Grenzfläche Σ zwischen den beiden Gebieten Ω1 und Ω2 existiere eine
Grenzflächenflussdichte ν (r ) der durch J beschriebenen extensiven Größe (ist
z.B. J = j die elektrische Stromdichte, so ist ν = i die elektrische Oberflächenstromdichte).
Diese Grenzflächenflussdichte ist ein Vektorfeld, das stets in der Tangentialebene
von Σ verläuft.
nicht differenziert werden und deshalb kann die difAn der Grenzfläche kann U
ferentielle Formulierung (1.52) nicht verwendet werden. Stattdessen gilt für eine
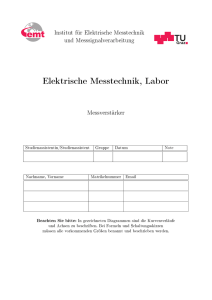
Kontrollfläche A mit positiv orientierter Randkurve C = ∂A, welche die Grenzfläche Σ schneidet (vgl. Abb. 1.4), die integrale Beziehung
∂A
dr =
U
A
J da +
A
V da +
ν · n ds
(1.53)
A∩Σ
wobei n die orientierte Oberflächennormale von A bezeichnet ( da = n da) und
1.4.2 Grenzflächenbedingungen für die tangentialen Feldkomponenten
29
¶A
r
n
A
W2
W1
åÇA
å
Abbildung 1.4: Grenzfläche Σ zwischen verschiedenen Materialbereichen und Kontrollfläche A zur Ableitung der Sprungbedingung.
ds das differentielle Linienelement entlang der Schnittlinie von A mit Σ (d.h. der
Kurve A ∩ Σ).
(r 0 ) = N
die vom Material
(ii) Für einen Punkt r 0 ∈ Σ auf der Grenzfläche sei N
2 weisende Oberflächennormale und t (r 0 ) = t ein Tangential1 zum Material vektor an Σ. Wir betrachten nun eine kleine rechteckige Kontrollfläche A, die auf
der Tangentialebene senkrecht steht und r 0 als Mittelpunkt hat (Abb. 1.5). Die
beiden Kanten γ1 und γ3 haben die Kantenlänge Δl und verlaufen parallel zu t
in den Gebieten Ω2 und Ω1 , die beiden Kanten γ2 und γ4 haben die Kantenlänge
Δb und verlaufen parallel zu N teilweise in Ω1 und teilweise in Ω2 . Mit dem in
Abb. 1.5 definierten Umlaufsinn hat das Rechteck A die orientierte Oberflächen × t .
normale n = N
Gl. (1.53) hat nun die spezielle Form:
4 dr =
U
i=1 γi
J + V
A
· n da +
ν · n ds
Σ∩A
Mit Hilfe des Mittelwertsatzes lassen sich die einzelnen Integrale wie folgt ausdrücken:
(r 1 ) · t Δl − U
(r 3 ) · t Δl + U
(r 4 ) · N
Δb − U
(r 2 ) · N
Δb
U
= J (r ∗ ) + V (r ∗ ) · n ΔlΔb + ν (r ∗∗ ) · n Δl
0
0
0
wobei r i Stützpunkte auf γi und r ∗0 sowie r ∗∗
0 Stützpunkte auf A bzw. Σ ∩ A
bezeichnen. Im Limes Δb → 0 verschwinden alle Terme proportional zu Δb; nach
30
1.4 Feldverhalten an Materialgrenzen
r
g 1 = t Dl
Db
r
g 2 = - N Db
r
t
2
r
N
r
r0
r
g 4 = N Db
Dl
S
1
r
g 3 = -t Dl
Abbildung 1.5: Rechteckige Kontrollfläche senkrecht zur Grenzfläche Σ
Division durch Δl und anschließender Grenzwertbildung Δl → 0 verbleiben die
Terme
(r ) · t (r 0 ) − lim U
(r ) · t (r 0 ) = ν (r 0 ) · n (r 0 )
lim U
r →
r
r →
r0
r ∈Ω2
Mit der Definition
0
r ∈Ω1
j · t (r 0 ) := lim U
(r ) · t (r 0 )
U
r →
r
0
r ∈Ωj
erhalten wir
für die einseitigen Grenzwerte der Tangentialkomponenten von U
schließlich die gesuchte Sprungbedingung:
2 · t − U
1 · t = ν · n
U
auf Σ
(1.54)
(iii) Wir wollen die rechte Seite von Gl. (1.54) noch etwas vereinfachen. Wegen
× t gilt:
n = N
× t = ν × N
ν · n = ν · N
· t
Damit lautet die Sprungbedingung:
2 · t − U
1 · t = ν × N
U
· t
für jeden Tangentialvektor t
(1.55)
Die in dieser Gleichung auszurechnende Projektion auf die Tangentialebene der
1.4.2 Grenzflächenbedingungen für die tangentialen Feldkomponenten
31
Grenzfläche kann noch eleganter ausgedrückt werden. Der Projektor auf die Tangentialebene lautet:
=X
− (N
·X
)·N
= −N
× (N
×X
)
ΠX
(siehe Abb. 1.6)
r rr
N ( NX )
r
N
r
X
r
PX
Abbildung 1.6: Projektor auf die Grenzflächentangentialebene
Es gelten nun folgende Äquivalenzen:
· t = 0 für alle t ⊥N
(d.h. für alle Tangentialvektoren)
X
=0 ⇔ N
× N
×X
⇔ ΠX
×X
=0
=0 ⇔ N
× N
×X
×X
=N
× N
Die letzte Äquivalenz gilt wegen −N
Damit lässt sich Gl. (1.55) folgendermaßen umformen:
2 · t − U
1 · t = (ν × N
) · t
U
für alle t ⊥ N
⇔
×U
2−N
(N
ν ) = ν
×U
1=N
× (ν × N
) = ν (N
·N
)−N
N
· 1
0
Hierbei wird benutzt, dass die Grenzflächenflussdichte ν stets tangential zu Σ
verläuft.
Damit erhalten wir nun die Sprungbedingung in der kompakten Formulierung
×U
1 = ν
×U
2−N
auf Σ
N
zeigt von 1 nach 2 )
(N
(1.56)
= − ∂ B wenden wir nun obige Aussage auf
(iv) Ausgehend vom Induktionsgestz rot E
∂t
an. Mit U
=E
, J = 0, V = − ∂ B und ν = 0 lautet die
das elektrische Feld E
∂t
32
1.5 Das Randwertproblem der Potentialtheorie
:
Sprungbedingung für E
1×N
=E
2×N
E
2 · t
1 · t = E
bzw. E
auf Σ
auf Σ
ist stetig”
“Tangentialkomponente von E
(1.57)
gehen wir vom Ampèreschen Gesetz rot H
= j + ∂ D aus
(v) Beim Magnetfeld H
∂t
= H
, J =
und lassen die Existenz einer Grenzflächenstromdichte i zu. Mit U
dann:
j , V = ∂ D und ν = i lautet die Sprungbedingung für H
∂t
×H
2−N
×H
1 = i auf Σ
N
zeigt von 1 nach 2 )
(N
(1.58)
Speziell gilt bei verschwindender Stromdichte i = 0:
1×N
=H
2×N
H
2 · t
1 · t = H
bzw. H
auf Σ
auf Σ
ist stetig”
“Tangentialkomponente von H
(1.59)
1.5 Das Randwertproblem der Potentialtheorie
Mit Hilfe des elektrischen Potentials lässt sich die Berechnung elektrostatischer Felder
auf die Berechnung einer skalaren Feldgröße Φ(r ) zurückführen. Im Falle der CoulombEichung gilt dies sogar für das elektromagnetische Skalarpotential Φ(r , t) (vgl. Gl. (1.44)).
Es ist daher zweckmäßig, sich mit einigen Grundtatsachen und Lösungsmethoden der
Potentialtheorie zu beschäftigen.
1.5.1 Das Randwertproblem der Elektrostatik: Rand- und
Grenzflächenbedingungen
(i) In einem dielektrischen Medium gelten im elektrostatischen Fall die Beziehungen
= E
, E
= −∇Φ, div D
= ρ. Die elektrische Permittivität wird als eine
D
positive (stückweise) differenzierbare Ortsfunktion (r ) angenommen. Setzt man
1.5.1 Das RWP der Elektrostatik
33
diese Gleichungen ineinander ein, so gelangt man zur Poissongleichung
div((r )∇Φ) = −ρ
(1.60)
Typischerweise ist diese partielle Differentialgleichung in einem Gebiet Ω ⊂ R3 zu
lösen. Für die Eindeutigkeit der Lösung müssen auf dem Rand ∂Ω Rand- bzw.
Grenzflächenbedingungen formuliert werden.
(ii) In elektrisch leitenden Medien gilt bei elektrostatischen Problemstellungen die Forderung j = 0, und da bei ohmschen Leitern j = −σ∇Φ gilt, folgt hieraus:
∇Φ = 0
Hieraus können wir schließen:
(1.61)
Φ(r ) = const. auf Leitern
(iii) Grenzflächenbedingungen für das elektrische Potential an Materialgrenzen:
Wenn zwei Gebiete Ω1 und Ω2 mit unterschiedlichen Materialeigenschaften (Permittivität 1 = 2 bzw. Leitfähigkeit σ1 = σ2 ) an einer gemeinsamen Grenzfläche
Σ miteinander verbunden sind (Abb. 1.7), muss die Tangentialkomponente des E
Feldes längs Σ stetig sein:
1 · t = E
2 · t für jeden Tangentialvektor t (vgl. Gl. (1.57)). Wegen E
= −∇Φ
E
ist dann aber zu fordern, dass die Tangentialkomponente von ∇Φ längs Σ stetig
ist. Durch Integration von t · ∇Φ in einem infinitesimalen Abstand „links“ und
„rechts“ von Σ folgt dann:
Φ ist längs Materialgrenzen stetig
r
t
r
n
r
r0
W1
1
.
e2
e1
S
W2
2
Abbildung 1.7: Tangenten- und Normalenvektor an einer Materialgrenzfläche Σ zwischen
zwei Dielektrika
34
1.5 Das Randwertproblem der Potentialtheorie
(iv) Grenzflächenbedingungen für die Normalenableitung des Potentials:
An einer Materialgrenze mit einem Sprung der Permittivität (1 = 2 ) gilt nach
Gl. (1.49) für die Normalkomponente der dielektrischen Verschiebung die Sprung 2 · n − D
1 · n = σint , wobei σint eine auf der Genzfläche Σ lokalisierte
bedingung D
= −∇Φ führt dies auf eine SprungFlächenladungsdichte bezeichnet. Wegen D
bedingung für die Normalenableitung des Potentials:
∂Φ ∂Φ − 2
= σint
1
∂n 1
∂n 2
wobei
auf Σ
(1.62)
∂Φ := lim n (r 0 ) · ∇Φ(r ) (j = 1, 2)
r0
∂n j rr→
∈Ω
j
den jeweils einseitigen Grenzwert der Richtungsableitung von Φ entlang der von
Ω1 zu Ω2 weisenden Grenzflächen-Normalen n bezeichnet.
1 ein Leiter ist,
(v) Einen Sonderfall stellt die Situation dar, wenn das Material 2 ein dielektrischer Isolator ist (Abb. 1.8). Im Leiter
während das Material r
E
r
n
.
r
r0
1 Leiter
F = const.
r
E
Isolator 2
r
E
.
.
Abbildung 1.8: Leiter und Isolator mit gemeinsamer Grenzfläche
-Feld, hat also an seinem Rand die Tangentialkomponente
verschwindet das E
1 · t = 0. Wegen der Stetigkeitsbedingung (1.57) hat dann das E
-Feld auch
E
2 · t = 0.
keine Tangentialkomponente im Grenzwert von der Seite des Isolators: E
Der einseitige Grenzwert des Potentialgradienten hat somit nur eine Normalkomponente
2 ⊥ Leiteroberfläche
−∇Φ|2 = E
dessen Größe sich aus der Grenzflächenladungsdichte σint auf der Leiteroberfläche
Σ ergibt:
1.5.1 Das RWP der Elektrostatik
35
2 · n = σint und wegen D
2 = − 2 ∇Φ| schließlich
Nach Gl. (1.49) gilt D
2
∂Φ = −σint
2
∂n 2
auf Σ
(1.63)
1 und 2
(vi) Ein zweiter Sonderfall liegt vor, wenn zwei dielektrische Isolatoren aneinander grenzen, ohne dass auf der Grenzfläche Σ eine Oberflächenladung exis und die
tiert (Abb. 1.9). In dieser Situation sind die Tangentialkomponente von E
längs Σ stetig:
Normalkomponente von D
1 · t = E
2 · t
E
1 · n = D
2 · n
D
und
j (j = 1, 2) und dividiert die zweite Gleichung durch
j = j E
Substituiert man D
die erste, so erhält man:
1 · t
2·t
1 E
1 E
= ·
·
1 · n
2 · n
1 E
2 E
2
1
r
r
0
(1.64)
r r
D2 ( E2 )
a2
.
r
n
a1
r r
D1( E1)
S
Abbildung 1.9: Feldlinienknick an Materialgrenze
Bezeichnen α1 und α2 die Winkel, welche die Feldlinien mit der Oberflächennormalen der Grenzfläche Σ in den Gebieten Ω1 und Ω2 einschließen, so gilt
(vgl. Abb. 1.10)
j · t
E
tan αj =
j · n
E
Eingesetzt in Gl. (1.64) ergibt sich das „Brechungsgesetz für elektrische Feldlinien“
tan α1
1
(1.65)
=
tan α2
2
36
1.5 Das Randwertproblem der Potentialtheorie
r r
E ×t
a
r r
E ×n
Abbildung 1.10: Feldzerlegung an Materialgrenze
1.5.2 Klassifikation der Potential-Randwertprobleme
In elektrotechnischen Problemstellungen sucht man Lösungen Φ der Poissongleichung
(1.60) auf einem beschränkten Gebiet Ω ⊂ R3 , das auf dem Rand ∂Ω bestimmte Vorgaben (Randbedingungen) erfüllt. Diese Aufgabenstellung wird als Randwertproblem
bezeichnet. Die Randbedingungen lassen sich in drei Gruppen unterteilen: Vorgabe der
Potentialwerte auf ∂Ω (Dirichlet-Problem), Vorgabe der Normalenableitung ∂Φ/∂n auf
∂Ω (Neumann-Poblem) oder Vorgabe einer Linearkombination von beiden (gemischtes
Randwertproblem).
1.5.2.1 Dirichletsche Randbedingung
(i) Die mathematische Problemstellung lautet: Zu lösen ist die Poissongleichung
div(∇Φ) = −ρ auf einem zusammenhängenden, beschränkten Gebiet Ω ⊂ R3 mit
glattem (lipschitz-stetigem) Rand ∂Ω, auf dem die Lösung Φ einen vorgegebenen
Verlauf ΦD (r ) annimmt: Φ(r ) = ΦD (r ) für alle r ∈ ∂Ω.
Die Kurzform dieses Dirichletschen Randwertproblems lautet:
[Dir-RWP]
div(∇Φ) = −ρ auf Ω̊
und
Φ|∂Ω = ΦD
(1.66)
(ii) Das so formulierte Randwertproblem ist mathematisch korrekt gestellt. Es gilt der
folgende Existenz- und Eindeutigkeitssatz:
Satz: Für ∈ C 1 (Ω) mit 0 < c0 ≤ (r ), ρ ∈ C(Ω) und ΦD ∈
C(∂Ω) hat [Dir-RWP] eine eindeutig bestimmte klassische Lösung
Φ ∈ C 2 (Ω) ∩ C 1 (Ω).
(iii) Bemerkung: Ein Gebiet Ω mit den unter (i) beschriebenen Regularitätseigenschaf-
1.5.2 Klassifikation der Potential-Randwertprobleme
37
ten wird als „Normalgebiet“ bezeichnet. Es hat die wesentliche Eigenschaft, dass
der Integralsatz von Gauß angewendet werden darf.
(iv) Ein typisches Beispiel für ein Dirichlet-RWP ist die Mehrelektroden - Kondensatoranordnung. Hier schließen N + 1 leitende Gebiete Ω0 , Ω1 , . . . , ΩN ein
dielektrisches Gebiet Ω ein (vgl. Abb. 1.11). Nach Gl. (1.61) sind alle ∂Ωj Äquipotentialflächen mit konstantem Potentialwert Vj .
r
n
r
n
¶W2
¶W1
W2
W1
W3
¶W3
r
n
¶Wn
Wn
r
n
r
n
r
e (r )
W
¶W0
Abbildung 1.11: Mehrelektroden-Kondensatoranordnung
Das Dielektrikum zwischen den Kondensatorelektroden ∂Ωj sei elektrisch neutral;
d.h. es besitzt keine Raumladung: ρ ≡ 0. Das Randwertproblem besteht darin,
zu gegebenen Potentialwerten (V0 , V1 , . . . , VN ) ∈ RN +1 auf den Elektroden das
elektrische Potential Φ(r ) im Dielektrikum Ω zu bestimmen.
In Kurzform lautet die Problemstellung:
[V-RWP]
div(∇Φ) = 0 in Ω und Φ|∂Ωl = Vl
(l = 0, 1, . . . , N )
Die Lösbarkeit dieses Randwertproblems garantiert der
Satz: [V-RWP] hat eine durch V = (V0 , V1 , . . . , VN ) eindeutig bestimmte, klassische Lösung Φ(r ).
(1.67)
38
1.5 Das Randwertproblem der Potentialtheorie
1.5.2.2 Neumannsche Randbedingung
(i) Die mathematische Problemstellung lautet hier: Zu lösen ist die Poissongleichung div(∇Φ) = −ρ auf einem zusammenhängenden, beschränkten Gebiet
Ω ⊂ R3 mit glattem (lipschitz-stetigem) Rand ∂Ω, auf dem die Normalenablei∂Φ
Φ(r ) (mit n = äußere Normale auf ∂Ω) einen
tung der Lösung
(r ) := n · ∇
∂n
vorgegebenen Wert FN (r ) annimmt.
Die Kurzform dieses Neumannschen Randwertproblems lautet:
∂Φ = FN
div(∇Φ) = −ρ auf Ω̊ und
∂n ∂Ω
[Neu-RWP]
(1.68)
NB: De facto entspricht die Neumann-Randbedingung der Vorgabe einer Ober (r ) · n (r ) = ∂Φ (r ) (r ∈ ∂Ω). Diese muss
flächenladungsdichte σ(r ) = −D
∂n
jedoch eine notwendige Voraussetzung erfüllen:
−
3
ρd r =
Ω
3
div(∇Φ) d r =
Ω
∂Ω
∇Φ · da =
n da ∂Ω
∂Φ
da =
∂n
FN da (1.69)
∂Ω
Insbesondere
ist im Falle verschwindender Raumladung (ρ ≡ 0) die Bedingung
!
FN da = 0 notwendig für die Lösbarkeit des Randwertproblems.
∂Ω
Die Bedingung (1.69) hat eine sehr anschauliche Interpretation:
Ω
ρ d3 r = −
∂Ω
∂Φ
da =
∂n
∂Ω
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎨
· da =
D
⎪
⎪
Q(Ω)
⎪
⎪
⎪
−
⎪
⎩
= in Ω eingeschlossene Ladung
σ da = gesamte OF-Ladung auf ∂Ω
∂Ω
Die Oberflächenladung auf ∂Ω kompensiert also genau die in Ω eingeschlossene
Ladung, so dass die gesamte Anordnung nach außen elektrisch neutral ist. Die
gesamte Feldenergie ist somit im Inneren von Ω enthalten.
(ii) Das so formulierte Randwertproblem ist mathematisch korrekt gestellt. Es gilt der
folgende Existenz- und Eindeutigkeitssatz:
1.5.2 Klassifikation der Potential-Randwertprobleme
39
Satz: Für ∈ C 1 (Ω) mit 0 < c0 ≤ (r ), ρ ∈ C(Ω), FN ∈ C(∂Ω)
mit
FN da = − ρ d3 r hat [Neu-RWP] eine bis auf ei∂Ω
Ω
ne additive Konstante eindeutig bestimmte klassische Lösung
Φ ∈ C 2 (Ω) ∩ C 1 (Ω)
(iii) Ein mit dem Neumannschen-RWP eng verwandtes Problem bietet die in § 1.5.2.1
bereits betrachtete Mehrelektroden - Kondensatoranordnung, wobei aber nun die
auf den Elektroden ∂Ωl befindlichen Gesamtladungen Ql vorgegebenen werden.
Das Randwertproblem besteht also darin, zu gegebenen Ladungen
(Q0 , Q1 , Q2 , ..., QN ) ∈ RN +1 auf den Elektroden das elektrische Potential Φ(r ) im
Dielektrikum Ω zu bestimmen. Die Lösbarkeitsbedingung (1.69) lässt sich hierbei
als Ladungsneutralitätsbedingung
N
Ql = 0 ausdrücken.
l=0
In Kurzform lautet die Problemstellung:
[Q-RWP]
div(∇Φ) = 0 in Ω und
∂Ωl
∂Φ
da = Ql für l = 0, 1, ..., N (1.70)
∂n
Die Lösbarkeit dieses Randwertproblems gewährleistet der
Satz: [Q-RWP] hat eine durch die Vorgabe von
Q = (Q0 , Q1 , ..., QN ) ∈ RN +1 mit
N
Ql = 0 bis auf eine additive
l=0
Konstante eindeutig bestimmte Lösung Φ(r ).
1.5.2.3 Gemischtes Randwertproblem, Randbedingung dritter Art
(i) Die mathematische Problemstellung lautet hier: Zu lösen ist die Poissongleichung div(∇Φ) = −ρ auf einem Normalgebiet Ω ⊂ R3 , so dass auf dessen Rand
∂Ω für gegebene Koeffizientenfunktionen α(r ) und β(r ) die Linearkombination
∂Φ
α(r )Φ(r ) + β(r ) (r ) einen vorgegebenen Wert F (r ) annimmt.
∂n
Dabei müssen an α, β und F gewisse Forderungen gestellt werden, damit die Lösbarkeit gewährleistet ist. Diese sollen anhand der folgenden Beispiele abgeleitet
werden.
(ii) Ein erstes Beispiel stellt ein realer elektrischer Kontakt mit ohmschem Kontaktwiderstand dar (Abb. 1.12). Der Kontakt ist eine dünne Schicht der Dicke d und
elektrischer Leitfähigkeit σ∂Ω , welche ein leitendes Gebiet Ω (z.B. Bauelement) der
Leitfähigkeit σΩ mit der Außenfläche des Kontakts (=„Klemme“) verbindet. Beide
Seiten der Kontaktschicht sind Äquipotentialflächen mit Potentialwerten Φin an
der Innenseite und ΦKlemme an der Außenseite. Innerhalb der Kontaktschicht hat
40
1.5 Das Randwertproblem der Potentialtheorie
das Potential einen linearen Verlauf; die elektrische Feldstärke hat den konstanten
= 1 (Φin − ΦKlemme ) n , wobei n die äußere Normale auf ∂Ω bezeichnet.
Wert E
d
sW
F(s)
s ¶W
F in
d
W
.
ÑF
I Klemme
r
n
F in
F Klemme
0
d
F Klemme
r r
n×r = s
Abbildung 1.12: Realer elektrischer Kontakt mit Kontaktwiderstand
= −σ∇Φ und der Bedingung, dass die elekMit dem Ohmschen Gesetz j = σ E
trische Stromdichte beim Übergang von Ω in die Kontaktschicht stetig ist, folgt
folgende gemischte Randbedingung für das elektrische Potential:
IKlemme
∂Φ (!)
Φin − ΦKlemme
= σ∂Ω
= j · n = − σΩ
= γel (Φin − ΦKlemme ) (1.71)
∂n ∂Ω
d
σ∂Ω
= γel als Übergangsleitwert bezeichnet wird und ΦKlemme einen vorged
gebenen Wert besitzt. Durch Division mit σΩ erhält man aus (1.71) die übliche
Form einer gemischten Randbedingung für Φ auf der Übergangsfläche ∂Ω:
wobei
∂Φ γel
=
Φ+
σΩ
∂n ∂Ω
γel
σΩ
ΦKlemme
auf ∂Ω
(1.72)
hel ≥ 0
Mit dem Übergangskoeffizienten hel :=
γel
lässt sich diese noch kürzer formulieren:
σΩ
∂Φ
= hel (ΦKlemme − Φ) auf ∂Ω
∂n
(1.73)
Man beachte, dass der Übergangskoeffizient hel eine positive Größe ist; dies gewährleistet, dass der Klemmenstrom in Richtung des elektrischen Feldes fließt und
stellt eine Lösbarkeitsbedingung für das gemischte Randwertproblem dar!
Mit Hilfe des Übergangskoeffizienten kann man zwischen Dirichletschen und Neumannschen Randbedingungen „interpolieren“:
∂Φ
= 0 (isolierender
Für hel = 0 folgt die homogene Neumann-Randbedingung
∂n
1.5.2 Klassifikation der Potential-Randwertprobleme
41
Rand),
für hel → ∞ folgt die Dirichlet-Randbedingung Φ = ΦKlemme (idealer ohmscher
Kontakt).
(iii) Als zweites Beispiel betrachten wir den Wärmetransport durch Wärmeleitung in
einem Festkörper. Die Wärmestromdichte J Q fließt dabei in Richtung des negativen Gradienten der Temperatur T :
J Q = −κ∇T
(1.74)
wobei κ die spezifische Wärmeleitfähigkeit bezeichnet. Dieses „ Fouriersche Gesetz
der Wärmeleitung“ ist das thermische Analogon zum Ohmschen Gesetz.
Die thermische Energie gehorcht einer Bilanzgleichung der allgemeinen Form (1.25);
bei stationärem Wärmefluss lautet sie:
div J Q = ΠQ
(1.75)
wobei ΠQ (r ) die lokale Wärmeproduktionsrate („Heizleistungsdichte“) bezeichnet.
Mit J Q aus Gl. (1.74) ergibt sich eine Poissongleichung für die Temperatur T :
div(κ∇T ) = −ΠQ
(1.76)
Diese ist auf einem Gebiet Ω ⊂ R3 zu lösen, über dessen Rand ∂Ω (oder Teile
davon) die Wärme über thermische Kontakte „nach außen“ abfließen kann.
Das thermische Kontaktmodell ist analog zum elektrischen Kontaktmodell (siehe vorheriger Abschnitt) gebildet: Der Kontakt ist eine dünne Schicht entlang
∂Ω der Dicke d und der thermischen Leitfähigkeit κ∂Ω , welche das wärmeleitende Gebiet Ω mit der Außenfläche des Kontakts verbindet. Beide Seiten der
Kontaktschicht sind Isothermen mit Temperaturwerten Tin an der Innenseite und
Text an der Außenseite. Innerhalb der Kontaktschicht hat das Temperaturprofil
einen linearen Verlauf; der negative Temperaturgradient hat den konstanten Wert
1
−∇T = (Tin − Text ) n , wobei n die äußere Normale auf ∂Ω bezeichnet.
d
kW
k¶ W
r
JQ
d
W
.
Tin
r r
J Q × n = IQ
ÑT
Text
r
n
0
d
r r
n×r = s
Abbildung 1.13: Thermischer Übergang durch eine Grenzschicht
42
1.5 Das Randwertproblem der Potentialtheorie
Mit dem Fourierschen Gesetz J Q = −κ∇T und der Bedingung, dass die Wärmestromdichte beim Übergang von Ω in die Kontaktschicht stetig ist, folgt folgende
gemischte Randbedingung für die Temperatur:
Tin − Text
∂T (!)
= κ∂Ω
IQ = J Q · n = −κΩ ·
= K (Tin − Text )
∂n ∂Ω
d
(1.77)
wobei κΩ und κ∂Ω die Wärmeleitfähigkeiten im Gebiet Ω und in der Kontaktschicht
κ∂Ω
den Wärmeübergangskoeffizienten („K-Wert“) darstellt.
bezeichnen und K :=
d
Die Außentemperatur Text hat einen vorgegebenen Wert. Durch Division mit κΩ
erhält man aus (1.77) die übliche Form einer gemischten Randbedingung für die
Temperatur T auf der Übergangsfläche ∂Ω:
K
∂T
T+
κΩ
∂n
=
∂Ω
K
κΩ
Text
auf ∂Ω
(1.78)
hth 0
Mit dem normierten Wärmeübergangskoeffizienten hth :=
bedingung noch kompakter formulieren:
K
lässt sich diese RandκΩ
∂T
= hth (Text − T ) auf ∂Ω
∂n
(1.79)
Man beachte, dass auch in diesem Fall der Übergangskoeffizient hth eine positive
Größe ist; dies gewährleistet, dass der Wärmestrom von der höheren zur niedrigeren Temperatur fließt und stellt eine Lösbarkeitsbedingung für das gemischte
Randwertproblem dar!
Mit Hilfe des Wärmeübergangskoeffizienten kann man auch hier zwischen zwei extremen Situationen interpolieren:
∂T
= 0 (völlige therFür hth = 0 folgt die homogene Neumann-Randbedingung
∂n
mische Isolation),
für hth → ∞ folgt die Dirichlet-Randbedingung T = Text (Anschluss an ein Wärmereservoir („Wärmesenke“) mit fester Temperatur Text ).
(iv) Die generische Kurzform eines gemischten Randwertproblems (oder Randwertproblems dritter Art) lautet somit folgendermaßen:
Sei Ω ⊂ R3 ein Normalgebiet (zusammenhängend, beschränkt, mit lipschitz-stetigem
Rand ∂Ω). Finde eine Lösung Φ des Problems
[Mix-RWP]
div(σ∇Φ) = −Π auf Ω̊ und
∂Φ
+ hΦ
∂n
= F auf ∂Ω
∂Ω
(1.80)
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
43
Aus physikalischen und mathematischen Gründen ist hierbei zu fordern:
σ > 0 und h ≥ 0
(v) Das oben formulierte Randwertproblem ist mathematisch korrekt gestellt. Es gilt
der folgende Existenz- und Eindeutigkeitssatz:
Satz: Für σ ∈ C 1 (Ω) mit 0 < c0 ≤ σ(r ), Π ∈ C(Ω), h ∈ C(∂Ω) mit
h ≥ 0, h = 0, und F ∈ C(∂Ω) hat [Mix-RWP] eine eindeutig
bestimmte klassische Lösung Φ ∈ C 2 (Ω) ∩ C 1 (Ω).
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
Um ein auf der Poissongleichung basierendes Randwertproblem konkret zu lösen, gibt es
neben computergestützten numerischen Techniken auch traditionelle analytische Verfahren, die -für hinreichend einfache Geometrien- eine explizite Lösung liefern. Im folgenden
soll für drei dieser Verfahren ein kurzer Abriss gegeben werden.
1.5.3.1 Orthogonalentwicklung nach Eigenfunktionen des Laplace-Operators
(Spektraldarstellung)
(i) Wir legen (exemplarisch) folgende Problemstellung zugrunde:
Wir betrachten ein Normalgebiet Ω ⊂ R3 , das aus dielektrischem Material der Permittivität ∈ C 1 (Ω) besteht, mit 0 < c0 ≤ (r ). Der Rand ∂Ω besteht aus Teilen
∂Ω(D) , auf denen das Potential vorgegebenen ist (Dirichletsche Randbedingung:
Φ|∂Ω(D) = ΦD ), und davon disjunkten Teilen ∂Ω(N ) , auf denen die Oberflächenladungsdichte σN und damit die Normalenableitung
des Potentials vorgegeben ist
∂Φ = σN ). Damit die Lösung der Poisson(Neumannsche Randbedingung: ∂n ∂Ω(N )
gleichung eindeutig ist (vgl. §1.5.2.2), muss zumindest auf einem Teil des Randes
das Potential gegeben sein, d.h. ∂Ω(D) = ∅.
In Kurzform lautet die Problemstellung dieses gemischten Randwertproblems somit:
[M-RWP]
div(∇Φ) = −ρ in Ω̊
mit Φ|∂Ω(D)
∂Φ = ΦD und = σN ,
∂n ∂Ω(N )
(1.81)
wobei ∂Ω = ∂Ω(D) ∪ ∂Ω(N) , ∂Ω(D) ∩ ∂Ω(N) = ∅, ∂Ω(D) = ∅
Um die eindeutige Lösung dieses Randwertproblems zu konstruieren, gehen wir in
drei Schritten vor.
44
1.5 Das Randwertproblem der Potentialtheorie
(ii) Lösungsschritt 1:
Man konstruiere zunächst eine auf Ω definierte, hinreichend glatte Funktion
Φ(0) ∈ C 2 (Ω) ∩ C 1 (Ω), welche die inhomogenen Randbedingungen erfüllt:
∂Φ(0) = σN .
Φ(0) (D) = ΦD und ∂Ω
∂n ∂Ω(N )
Für die Lösung Φ von [M-RWP] macht man dann den Ansatz Φ = Φ(0) + ϕ.
Die Funktion ϕ ist dann eine Lösung des modifizierten Randwertproblems mit
homogenen Randbedingungen:
div (∇ϕ) = −ρ − div ∇Φ(0) =: −f
∂ϕ ∂n ϕ|∂Ω(D) = 0,
in Ω
(1.82)
=0
∂Ω(N )
(iii) Lösungsschritt 2:
Die Lösung ϕ des Randwertproblems (1.82) kann man aus den Eigenfunktionen
bν (r ) und Eigenwerten λν ∈ C des Differentialoperators − div(∇ . ) aufbauen.
Letztere sind die Lösungen des Eigenwertproblems
− div(∇bν ) = λν bν
mit bν |∂Ω(D)
∂bν = 0 und
∂n in Ω̊
=0
(1.83)
∂Ω(N )
Für beschränkte, zusammenhängende Gebiete Ω mit glattem Rand (Normalgebiete) haben Eigenwerte und Eigenfunktionen folgendene Eigenschaften:
a) Das Spektrum {λν |ν = 1, ..., ∞} ist diskret und alle Eigenwerte sind strikt
positiv: λν > 0. Man kann sie als aufsteigende Folge 0 < λ1 ≤ λ2 ≤ λ3 ≤ . . .
anordnen.
b) Die Eigenfunktionen {bν }ν∈N können orthonormal im Funktionenraum L2 (Ω)
gewählt werden. Hierbei ist das Skalarprodukt zweier Funktionen f, g ∈ L2 (Ω)
als
(1.84)
< f |g >:= f (r )∗ g(r ) d3 r
Ω
definiert. Die orthonormierten Eigenfunktionen bν erfüllen also die Bedingungen
< bμ |bν > =
bμ (r )∗ bν (r ) d3 r = δμν
(1.85)
Ω
mit dem Kroneckerschen Deltasymbol δμν .
c) Die Eigenfunktionen {bν }ν∈N sind vollständig; d.h. jede Funktion ϕ ∈ L2 (Ω)
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
45
lässt sich bezüglich des Skalarproduktes (1.84) nach b1 , b2 , b3 , . . . entwickeln:
ϕ=
∞
ν=1
αν bν mit αν =< bν |ϕ >
(1.86)
Diese Beziehung lautet explizit:
∀
ϕ∈L2 (Ω)
∞
ϕ(r ) =
ν=1
Ω
∞
Ω
ν=1
=
bν (r )∗ ϕ(r ) d3 r
bν (r )
bν (r )bν (r )∗ ϕ(r ) d3 r
Deltafunktion δ(r − r )
woraus man die Vollständigkeitsrelation der Eigenfunktionen ableiten kann:
∞
ν=1
bν (r )bν (r )∗ = δ(r − r )
(1.87)
(iv) Lösungsschritt 3:
Für eine gegebene rechte Seite f des Randwertproblems (1.82) konstruieren wir
∞
nun die Lösung ϕ mit dem Ansatz ϕ(r ) =
ν=1
αν bν (r ), wobei die Entwicklungs-
koeffizienten αν noch zu bestimmen sind. Die homogenen Randbedingungen für ϕ
werden identisch erfüllt, weil sie von allen Basisfunktionen bν erfüllt werden (vgl.
(1.83)). Es bleibt also noch die Poissongleichung zu lösen. Setzt man in diese den
obigen Ansatz ein, so folgt:
!
f = − div(∇ϕ) =
∞
ν=1
αν [− div(∇bν )] =
λν b ν
∞
ν=1
Das Skalarprodukt dieser Gleichung mit bμ ergibt
< bμ |f > =
∞
ν=1
αν λν < bμ |bν > = αμ λμ
δμν
Hieraus erhält man die Entwicklungskoeffizienten αμ als
< bμ |f >
1
αμ =
=
λμ
λμ
Ω
bμ (r)∗ f (r )d3 r
αν λ ν b ν
46
1.5 Das Randwertproblem der Potentialtheorie
Damit lautet die Lösung des RWP (1.82)
ϕ(r ) =
∞
< bν |f >
λν
ν=1
bν (r )
(1.88)
Durch Vertauschen von Summation und Integration folgt hieraus die alternative
Darstellung:
ϕ(r ) =
∞
Ω ν=1
bν (r )
1
bν (r )∗ f (r ) d3 r
λν
(1.89)
Greenfunktion G(r , r )
Diese Gleichung kann man als linearen Integraloperator f → ϕ auffassen, der jeder
rechten Seite des RWP (1.82) die Lösung ϕ zuordnet. Dieser Integraloperator ist
also der Umkehroperator zum Differentialoperator − div(∇ . ); sein Integralkern
G(r , r ) wird als Greenfunktion des RWP (1.82) bezeichnet. Die Spektraldarstellung
G(r , r ) =
∞
ν=1
bν (r )
1
bν (r )∗
λν
(1.90)
bietet eine konkrete Möglichkeit, die Greenfunktion zu berechnen. Deren definierende Eigenschaften und weitere Möglichkeiten, sie zu bestimmen, werden im folgenden diskutiert.
1.5.3.2 Lösung mittels Greenfunktion
(i) Die Greenfunktion G(r , r ) für das in (1.81) definierte exemplarische Randwertproblem [M-RWP] ist definiert als die Lösung des reduzierten Randwertproblems
(1.82) mit homogenen Randbedingungen und rechter Seite f (r ) = δ(r −r ) („Einheits - Punktladung“ am Ort r ). Die definierende Beziehung lautet also:
divr ((r )∇r G(r , r )) = −δ(r − r ) in Ω̊
mit G(r , r ) = 0 für r ∈ ∂Ω(D)
und
(1.91)
∂G(r , r )
= 0 für r ∈ ∂Ω(N )
∂n
Die Ortsableitungen sind hierbei im Distributionssinn zu verstehen („verallgemeinerte Ableitung“).
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
47
(ii) Ist ϕ die Lösung des RWP (1.82), so gilt:
δ(r − r )ϕ(r ) d3 r
ϕ(r ) =
Ω
=−
divr̃ ( ∇r G(r , r )) ϕ(r ) d3 r
Ω
Ω
=−
0
n · ∇r G(r , r ) ϕ(r ) da
∂Ω(N )
0
3 G(r , r ) divr̃ ( ∇r ϕ(r )) d r +
Ω
−f (r )
∂Ω(D)
G(r , r ) (r ) n · ∇r ϕ(r ) da
0
G(r , r ) (r ) n · ∇r ϕ(r ) da
+
∂Ω(N )
=
∇r G(r , r ) ϕ(r ) da ∂Ω(D)
−
∇r G(r , r ) · ∇r ϕ(r ) d3 r −
=
3 G(r , r )f (r ) d r =
Ω
0
G(r , r )f (r ) d3 r
Ω
Bei der letzten Gleichheit wurde verwendet, dass die Greenfunktion symmetrisch
bezüglich einer Vertauschung von r und r ist: G(r , r ) = G(r , r ). Dies ist auch
aus Gl. (1.90) ersichtlich (man beachte, dass G(r , r ) reellwertig ist). Als Endergebnis erhalten wir also diesselbe Aussage wie in Gl. (1.89):
ϕ(r ) =
G(r , r )f (r ) d3 r
Ω
löst das Randwertproblem (1.82)
(iii) Kennt man die Eigenfunktionen und Eigenwerte von − div(∇ . ), so gilt nach
(1.89) die Spektraldarstellung:
G(r , r ) =
∞
ν=1
bν (r )
1
bν (r )∗
λν
Für unbeschränkte Gebiete Ω gilt eine analoge Darstellung, aber das Spektrum
der Eigenwerte bildet eine kontinuierliche Menge Σ ⊂ R+ , und deshalb muss die
diskrete Summe durch ein Integral ersetzt werden:
∞
ν=1
(. . . , bν , λν , . . .)
→
(. . . , bk , λk , . . .) dμ(k)
k∈Σ
48
1.5 Das Randwertproblem der Potentialtheorie
(iv) Als einfaches Beispiel wollen wir die Spektraldarstellung der Greenfunktion für
den Quader Ω = (0, L1 ) × (0, L2 ) × (0, L3 ) mit homogenen Dirichletbedingungen
und konstanter Permittivität = const. berechnen. Das Randwertproblem lautet
in diesem Fall:
−Δϕ =
1
f =: f in Ω mit ϕ|δΩ = 0
(1.92)
Die Geometrie des Problems legt es nahe, die Eigenfunktionen in kartesischen
Koordinaten r = x1e 1 + x2e 2 + x3e 3 zu bestimmen und einen Separationsansatz
b(r ) = b1 (x1 ) · b2 (x2 ) · b3 (x3 )
zu machen.
Wegen Δ =
∂2
∂2
∂2
+
+
lautet dann das Eigenwertproblem:
∂x21 ∂x22 ∂x23
!
−Δb = −b1 b2 b3 − b1 b2 b3 − b1 b2 b3 = λ b1 b2 b3
Hieraus folgt durch Division mit b1 b2 b3 :
−
b1 (x1 ) b2 (x2 ) b3 (x3 )
−
−
=λ∈R
b1 (x1 ) b2 (x2 ) b3 (x3 )
Da jeder der Summanden nur von einer der Koordinaten x1 , x2 , x3 alleine abhängt,
muss er für sich eine Konstante sein:
−
b1 (x1 )
b (x2 )
b (x3 )
= λ1 ; − 2
= λ2 ; − 3
= λ3
b1 (x1 )
b2 (x2 )
b3 (x3 )
Damit genügt jede Funktion bi (xi ) der Differentialgleichung
bj (xj ) + λj bj (xj ) = 0
(j = 1, 2, 3)
Deren allgemeine Lösung lautet
bj (xj ) = Aj sin(kj xj ) + Bj cos(kj xj ) mit kj =
λj
Um die Randbedingungen auf ∂Ω zu erfüllen, muss gelten:
bj (0) = 0
⇒
Bj = 0
bj (Lj ) = 0
⇒
kj Lj = nj π mit nj ∈ N
Damit gilt kj = nj π/Lj (nj ∈ N). Die Eigenwerte sind dann
λn1 n2 n3
n1 π
= λ1 + λ2 + λ3 =
L1
2
n2 π
+
L2
2
+
n3 π
L3
2
(1.93)
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
49
und die Faktoren der Eigenfunktionen lauten:
π
bj (xj ) = Aj sin nj
xj
Lj
(1.94)
Die Normierung der Eigenfunktionen erfolgt faktorweise:
!
Lj
1=
2
bj (xj ) dxj =
Lj
A2j
sin
0
π
nj
xj
Lj
2
0
woraus folgt:
!
Aj =
dxj = A2j
Lj
2
2
Lj
Damit lauten die Eigenfunktionen:
3
3
"
π
(2) 2
bn1 n2 n3 (r ) = √
sin nj
xj ;
Lj
L1 L2 L3 j=1
nj ∈ N
(1.95)
Die Greenfunktion ist schließlich gegeben als
G(r , r ) =
n1 ,n2 ,n3 ∈N
bn1 n2 n3 (r )
1
λn1 n2 n3
bn1 n2 n3 (r )
(1.96)
Eingesetzt in Gl. (1.89) erhält man eine Darstellung der Lösung des RWP (1.92)
als diskrete Fourier-Reihe.
1.5.3.3 Konstruktion der Greenfunktion mit Hilfe der Spiegelladungsmethode
(i) Eine rein geometrische Konstruktion der Greenfunktion leistet die Spiegelladungsmethode, wenn das betrachtete Gebiet Ω von einer oder einigen wenigen ebenen leitenden Randflächen begrenzt wird (z.B. Halbraum oder Winkelraum). Ausgangspunkt ist hierbei die Greenfunktion zur Poissongleichung im unbeschränkten
homogenen Raum Ω = R3 , die sogenannte Vakuum-Greenfunktion.
(ii) Herleitung der Vakuum-Greenfunktion:
Eine Punktladung Q bei r 0 erzeugt im unbeschränkten Raum mit konstanter Permittivität 0 das Potential
ϕ(r ) =
1
Q 1
·
·
0 4π |r − r 0 |
(1.97)
50
1.5 Das Randwertproblem der Potentialtheorie
Dieses erfüllt im Unendlichen die homogene Dirichlet-Randbedingung
lim ϕ(r ) = 0
(1.98)
|
r |→∞
Dies bedeutet, dass das Coulomb-Potential (1.97) die Poissongleichung (im Distributionssinn) löst:
− div(0 ∇ϕ) = −Q Δr
1
1
4π |r − r 0 |
Q δ(r − r 0 )
=
(1.99)
Punktladungsdichte
Durch Vergleich mit (1.91) erkennt man, dass
GVac (r , r ) =
1
1
4π0 |r − r |
(1.100)
die Greenfunktion zur Poissongleichung in Ω = R3 mit der Randbedingung (1.98)
darstellt. Das heißt, dass (im Sinne einer Distributionsableitung) gilt:
Δr
1
1
4π |r − r |
= −δ(r − r )
In der Tat wird die Poissongleichung Δϕ = −
Coulomb-Integral
ϕ(r ) =
R3
(1.101)
ρ
im gesamten R3 gelöst durch das
0
1 ρ(r ) 3 GVac (r , r )ρ(r ) d r =
dr
4π0 3 |r − r |
3 (1.102)
R
(iii) Aus der Vakuum-Greenfunktion (1.100) lässt sich die Greenfunktion für den Halbraum mit ideal leitendem Rand konstruieren (siehe Abb. 1.14).
Das dielektrische Gebiet ist der Halbraum
Ω = H := {r = r || + zn | r || · n = 0;
z > 0},
dessen Rand von der Ebene
∂H = {r = r || | r || · n = 0;
z = 0}
gebildet wird. Hierbei ist n der Normalenvektor der Ebene ∂H. Die Permittivität
sei im Halbraum H konstant. Der unterhalb der Randfläche liegende Halbraum
z ≤ 0 sei ein (idealer) metallischer Leiter, der zusammen mit der Ebene ∂H ein
Äquipotentialgebiet mit konstantem Potential bildet, das auf den Wert Φ(r ) = 0
gesetzt werden kann. Um die Greenfunktion für den Halbraum H zu bestimmen,
wird eine Punktladung Q an den Ort r Q ∈ H gesetzt und das von Q erzeugte
Potential bestimmt.
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
r
rQ
r
n
51
r
rQ
Q
0x
Q
r xr
n rQ*
e
r
rP
Ebene ¶H
r
rP
H
H*
metallischer Halbraum
e
F = const. = 0
Reales Problem
-Q
Ersatzproblem
Abbildung 1.14: Punktladung vor metallischem Halbraum
Statt dieses reale Problem zu lösen, betrachten wir aber ein Ersatzproblem, indem
wir das Dielektrikum über ∂H hinaus nach unten fortsetzen (mit gleicher Permittivität wie in H). In dieses virtuelle Dielektrikum wird am Punkt r ∗Q , der durch
Spiegelung des Punktes r Q an der Ebene ∂H entsteht, eine virtuelle Gegenladung
−Q plaziert. Ladung und Gegenladung erzeugen im Halbraum H das elektrische
Potential
#
1
Q
1
ΦH (r ) =
−
4π |r − r Q | |r − r ∗Q |
$
für r ∈ H
(1.103)
Dieses Potential zum Ersatzproblem stimmt im Halbraum H mit dem Potential
des realen Problems überein. Denn es erfüllt zum einen die Poissongleichung in H
mit der Ladung Q am Ort r Q als Quelle, da mit (1.101) gilt:
div( ∇ΦH ) = Q · Δr
1
1
− Q · Δr
4π |r − r Q |
1
1
4π |r − r ∗Q |
= −Q δ(r − r Q ) + Q δ(r − r ∗Q )
= 0 für r ∈ H
(Man beachte: Da für r ∈ H stets r = r ∗Q gilt, liefert die zweite Deltafunktion in
H keinen Beitrag.)
Zum anderen erfüllt ΦH auch die Randbedingung auf ∂H:
Für r ∈ ∂H gilt |r − r Q | = |r − r ∗Q |, und damit ist ΦH (r ) = 0 für r ∈ ∂H.
Die Greenfunktion für den Halbraum GH (r , r ) erhalten wir aus Gl. (1.103),
indem wir Q = 1 und r Q = r setzen. Bezeichnen wir die Spiegelung an der Ebene
∂H mit S:
r = r || + zn → r ∗ = Sr := r || − zn
52
1.5 Das Randwertproblem der Potentialtheorie
so lautet die Greenfunktion
#
1
1
1
−
GH (r , r ) =
4π |r − r | |r − Sr |
$
(1.104)
Für beliebige Ladungsverteilungen ρ(r ), r ∈ H ist
Φ(r ) =
GH (r , r )ρ(r ) d3 r
(1.105)
H
die Lösung des Potentialproblems in H. Explizit lautet dieses Integral
⎡
⎤
1 ⎣ ρ(r ) 3 ρ(r )
Φ(r ) =
r
−
d
d3 r ⎦
4π
|r − r |
|r − Sr |
H
H
(siehe Abb. 1.15)
Reales Problem
r
r (r )
Ersatzproblem
H
r
r (r )
gespiegelt
F=0
Metall
r
- r (r * )
Abbildung 1.15: Ladungsspiegelungsprinzip beim Halbraum-Problem
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
53
(iv) In analoger Weise lässt sich die Spiegelladungsmethode auf einen Viertelraum
(90◦ - Winkelraum) mit metallischer Begrenzung anwenden (Abb. 1.16).
Reales Problem
Ersatzproblem
¶W
y
W
Q
r
rQ
r
S1rQ
-Q
Q
r
rQ
O
O
r
S2rQ
F(r ) = const.= 0
r
S3rQ
+Q
x
-Q
Abbildung 1.16: Punktladung vor metallischem 90◦ - Winkelraum
Der Viertelraum W habe eine konstante Permittivität . Zwei Halbebenen bilden
den Rand ∂W , auf dem das Potential der Randbedingung Φ∂W = 0 genügen muss.
Um diese zu erfüllen, wird die reale Punktladung Q am Ort rQ dreimal gespiegelt
an die Punkte S1r Q , S2r Q und S3r Q mit der Ladung −Q, +Q und −Q (siehe
Abb. 1.16). Das Potential zum Ersatzproblem lautet dann:
Q
ΦW (r ) =
4π
#
1
1
−
|r − r Q | |r − S1r Q |
$
1
1
+
−
|r − S2r Q | |r − S3r Q |
(1.106)
für r ∈ W
Es stimmt im Winkelraum W mit dem Potential des realen Problems überein, wie
man analog zum Halbraumproblem beweisen kann. Insbesondere erfüllt ΦW die
Randbedingung ΦW (r ) = 0 für r ∈ ∂W , weil sich für r ∈ ∂W jeweils zwei der
vier Terme in Gl. (1.106) paarweise kompensieren.
Die Greenfunktion für den Winkelraum GW (r , r ) erhält man aus Gl. (1.106),
indem man Q = 1 und r Q = r setzt. Sie lautet
GW (r , r ) =
3
1 (−1)n
4π n=0 |r − Snr |
wobei S0r = r die identische Abbildung bezeichnet.
(1.107)
54
1.5 Das Randwertproblem der Potentialtheorie
1.5.4 Stationäre Stromverteilung
Auf ein Potentialproblem führt auch die Berechnung stationärer Stromverteilungen in
leitenden Materialien. Die bereits dargestellten theoretischen Aussagen und Lösungsmethoden der Potentialtheorie können hierauf in analoger Weise übertragen werden.
1.5.4.1 Bilanz- und Transportgleichungen für elektrische Strömungsverteilungen
(i) Ladungsbilanz: Wie bereits in § 1.2.3 diskutiert wurde, erhält man aus (1.1) und
(1.4) die Beziehung:
) = div j +
0 = div(rot H
∂ div D
∂t
= div j +
∂ρ
.
∂t
Die Ladungserhaltungsgleichung
div j +
∂ρ
=0
∂t
(1.108)
bildet die Grundlage für die Theorie elektrischer Strömungen.
(ii) Transportmodell für die beweglichen Ladungsträger
Um ein geschlossenes Gleichungssystem zu erhalten, muss die Stromdichte j durch
die sie treibenden Kräfte ausgedrückt werden. In einem Leiter oder Halbleiter kann
man zumeist in guter Näherung vom Drift-Diffusions-Modell ausgehen.
Wir nehmen an, dass das elektrische Strömungsfeld aus K verschiedenen Sorten
von Ladungsträgern zusammengesetzt ist, welche die spezifische Ladung qα , Beweglichkeit μα und Teilchendichte nα besitzen. Die Trägersorte α trägt dann mit
der Partialstromdichte
− qα Dα ∇nα
j α = |qα |nα μα E
(1.109)
zum gesamten Stromfluss bei. Der erste Term bezeichnet den Driftstrom im elektri (vgl. Vorlesung Elektrizität und Magnetismus §2.2.2) und führt zum
schen Feld E
Ohmschen Gesetz. Dieser Transportmechanismus ist in Metallen dominant. Der
zweite Term bezeichnet den Diffusionsstrom. Dieser fließt immer in Richtung des
negativen Konzentrationsgradienten −∇nα . Seine Intensität ist durch den Diffusionskoeffizienten Dα > 0 gegeben; dieser Zusammenhang wird auch als Ficksches
Diffusionsgesetz bezeichnet. Der Diffusionsstrom ist insbesondere in Halbleiterbauelementen wie Dioden und Bipolartransistoren relevant. In diesem Fall hat man
zwei Trägersorten, nämlich die Leitungselektronen (α = n) und die Defektelektronen (Löcher, α = p).
1.5.4 Stationäre Stromverteilung
55
Wir nehmen weiterhin an, dass das elektrische Feld keine durch das Induktionsge = − ∂ B induzierten Wirbelfelder enthält und damit keine Wirbelströme
setz rot E
∂t
= 0, und damit ist das E
-Feld ein reines
vorhanden sind. Für ∂∂tB = 0 folgt rot E
Gradientenfeld:
= −∇Φ
E
Damit kann man die Partialstromdichte j α als Summe zweier Gradienten darstellen:
j α = − (|qα |nα μα ∇Φ + qα Dα ∇nα )
(1.110)
Der Diffusionskoeffizient Dα und die Beweglichkeit μα sind über die „Einsteinrelation“ Dα = |qkTα | μα miteinander verknüpft. Mit Hilfe des elektrochemischen Potentials
(oder Quasiferminiveaus)
kT nα
Φα := Φ +
ln
(1.111)
qα
n0
lässt sich daher die Partialstromdichte j α in kompakter Form darstellen als
j α = −σα ∇Φα
(1.112)
wobei σα := |qα |μα nα die spezifische elektrische Leitfähigkeit der Trägersorte α
bezeichnet.
Die Gesamtstromdichte ergibt sich schließlich als
j =
K
j α
(1.113)
qα n α
(1.114)
α=1
und die zugehörige Raumladungsdichte ist
ρ=
K
α=1
(iii) Detaillierte Bilanzgleichungen:
Wie im Abschnitt 1.2.3 (vi) diskutiert wurde, genügen die Teilchen jeder Trägersorte α einer Teilchenbilanzgleichung (vgl. (1.25)):
1
∂nα
= − div j α + Gα
∂t
qα
(α = 1, ..., K)
(1.115)
wobei Gα die Generations-Rekombinationsrate der Spezies α bezeichnet. Man be1
achte, dass j α die Teilchenstromdichte der Spezies α ist. Damit die detaillierqα
ten Bilanzen (1.115) mit der Ladungserhaltungsgleichung (1.108) verträglich sind,
56
1.5 Das Randwertproblem der Potentialtheorie
muss wegen (1.113) und (1.114) gelten:
K
∂ρ ∂nα
0 = div j +
div j α + qα
=
∂t α=1
∂t
K
α=1
=
K
α=1
q α Gα ,
q α Gα = 0
also
(1.116)
1.5.4.2 Stationäre Strömungsfelder im Drift-Diffusions-Modell
∂nα
= 0. Mit der Stromrelation (1.112) eingesetzt in
∂t
(1.115) erhalten wir ein System partieller Differentialgleichungen für die elektrochemischen Potentiale Φα :
Bei stationären Strömungen gilt
div (σα ∇Φα ) = −qα Gα
(1.117)
das zusammen mit der Poissongleichung für das elektrische Potential Φ
div (∇Φ) = −ρ = −
K
α=1
qα n α
(1.118)
zu lösen ist. Die Trägerkonzentrationen nα werden hierbei mit Hilfe von (1.111) aus
Φα und Φ berechnet, die gesuchten Stromdichten mit Hilfe von (1.112). Das gekoppelte
System von Differentialgleichungen (1.117) und (1.118) ist auf einem Gebiet Ω ⊂ R3
(=Bauelement) mit geeignet gewählten (gemischten) Randbedingungen zu lösen.
1.5.4.3 Stationäre Strömungsfelder im Ohmschen Transportmodell
(i) Dielektrische Relaxation
Den einfachsten Fall stellt ein metallischer Leiter dar, in dem ein rein Ohmscher
Ladungstransport mit nur einer einzigen Trägersorte (Elektronen) erfolgt. Es gilt
also das einfache Ohmsche Gesetz
= −σ∇Φ.
j = σ E
(1.119)
= E
, das Gaußsche Gesetz
Gleichzeitig gelten natürlich die Materialgleichung D
= ρ, sowie die Ladungserhaltungsgleichung (1.108). Ineinander eingesetzt
div D
ergibt sich bei konstant angenommener Leitfähigkeit σ und Permittivität die
Beziehung
σ
σ
∂ρ
= − σ ρ,
D = − div D
= − div j = − div
∂t
1.5.4 Stationäre Stromverteilung
57
also
∂ρ
σ
σ
=− ρ
mit = constans
(1.120)
∂t
Wird der elektrisch neutrale stationäre Gleichgewichtszustand durch eine lokale Ladungsfluktuation Δρ(t, r ) gestört, so folgt durch zeitliche Integration von
(1.120):
Δρ(t, r ) = Δρ(t0 , r ) exp −
t − t0
τR
(1.121)
wobei
σ
als dielektrische Relaxationszeit bezeichnet wird.
τR :=
(1.122)
Typische Werte für τR sind:
• Metall: τR ≈ 10−15 s = 1 fs
• Halbleiter: τR ≈ 10−12 . . . 10−4 s
• Isolator: τR = 104 . . . 106 s ≈ 10 Tage
(ii) Quasistationäre Näherung
In einem Metall ist die Relaxationszeit so kurz, dass alle zeitlichen Vorgänge, die
für die technische Anwendung von Interesse sind (Schalten, Ladungsverschiebung
etc.), langsam ablaufen im Vergleich zu τR . Deshalb kann man auf der technisch
relevanten Zeitskala ( μs, ns) die Ausbildung einer Raumladung meistens vernachlässigen:
∂ρ
≈0
∂t
(1.123)
Dies nennt man quasistationäre Näherung.
1.5.4.4 Randwertproblem für stationäre Ohmsche Strömungsfelder
Gemäß der Ladungserhaltungsgleichung (1.108) bleibt in der quasistationären Näherung
nur noch das stationäre Strömungsproblem
div j = 0
(1.124)
zu lösen. Mit dem Ansatz (1.119) einer Potentialströmung gelangen wir so zu einer
homogenen Poissongleichung für das elektrische Potential:
div(σ(r )∇Φ) = 0
(1.125)
58
1.5 Das Randwertproblem der Potentialtheorie
r
n
¶W1
Kontakt
¶Wn
r
r
j = -s E
r
div j = 0
W
r
s (r )
¶W2
Abbildung 1.17: Stromführendes Gebiet begrenzt von elektrischen Kontakten und isolierenden Randstücken
Diese ist auf einem Gebiet Ω ⊂ R3 zu lösen, auf dessen Rand ∂Ω folgende Randbedingungen gestellt werden:
Der Rand ∂Ω enthält potentialgesteuerte Kontakte (Klemmen) ∂Ω1 , ∂Ω2 , ..., ∂ΩN , auf
denen die Potentialwerte
(j = 1, ..., N )
Φ|∂Ωj = Vj
vorgegeben sind. Die übrigen Randflächenstücke sind elektrisch isolierend,
∂Φ
= 0, wobei n die äußere Normale auf ∂Ω bezeichnet. Dies führt auf
d.h. j · n = −σ
∂n
die homogene Neumannsche Randbedingung
⎛
∂Φ
=0
∂n
auf ∂Ω\ ⎝
N
%
j=1
⎞
∂Ωj ⎠
Insgesamt ist also ein gemischtes Randwertproblem zu lösen, wie es bereits im Abschnitt
1.5.2 behandelt wurde (vgl. Gl. (1.80)).
1.5.5 Korrespondenz zwischen Elektrostatik, stationären
elektrischen Strömen, Magnetostatik und stationärem
Wärmefluss
Die feldtheoretische Beschreibung von Problemstellungen in der Elektrostatik, bei stationärem elektrischem Stromfluss, in der Magnetostatik und bei stationärem Wärmefluss
folgt völlig analogen Grundgleichungen (Bilanzgleichungen und gradientengetriebenen
Flussgrößen). Diese Korrespondenzen sind in folgender Tabelle zusammengestellt. Sie
erlauben es, generische mathematische Lösungsmethoden (wie z.B. Lösen der Poisson-
1.5.5 Korrespondenz
59
gleichung) auf jedes der vier genannten Problemfelder in analoger Weise anzuwenden.
Aus der mathematischen Struktur der feldtheorethischen Beschreibung lässt sich eine Netzwerkbeschreibung mit konzentrierten Netzwerkelementen ableiten. Das Ergebnis ist ein Kirchhoffsches Netzwerk mit geeignet gewählten „Across-Größen“ (KnotenPotentialen) und „Through-Größen“ (Zweigströmen), die den Kirchhoffschen Gesetzen
(Knoten- und Maschenregel) genügen. Die in der Tabelle aufgelisteten Korrespondenzen
ermöglichen es, elektrische Netzwerke auf magnetische Kreise, dielektrische Netzwerke
oder thermische Netzwerke in analoger Weise abzubilden und damit die Methoden der
Netzwerktheorie gleichermaßen anzuwenden.
)
(j , σ, E
div j = 0
=0
rot E
= −∇Φel
E
j = −σ∇Φel
div(σ∇Φel ) = 0
, , E
)
(D
=ρ
div D
=0
rot E
= −∇Φel
E
= −∇Φel
D
div(∇Φel ) = −ρ
Korrespond. Feldgrößen
(Cont)
(Pot)
treibende Kraft
Flussgröße
U = RD · ΦD
dielektrisches
Netzwerk
Kirchhoffsches
Netzwerk
A
lineares
Materialgesetz
ΦD =
A
elektrisches
Netzwerk
U = Rel · I
I=
j da
da
D
elektrischer
Strom
dielektrischer
Fluss
−
U = Φ+
el − Φel
−
U = Φ+
el − Φel
„Across“-Größe
„Through“-Größe
elektrische
Spannung U
elektrische
Spannung U
Netzwerkdarstellung
(Pot) in (Cont)
stationäre elekt. Strömungen
Elektrostatik
A
da
B
magnetischer
Kreis
Vm = R m · Φ B
ΦB =
magnetischer
Fluss
−
Vm = Φ+
mag − Φmag
magnetische
Spannung Vm
div(μ∇Φmag ) = 0
= −μ∇
Φmag
B
= −∇Φmag
H
= j (= 0)
rot H
=0
div B
, μ, H
)
(B
Magnetostatik
A
J Q da
thermisches
Netzwerk
ΔT = Rth · Q̇
Q̇ =
Wärmestrom
ΔT = Theiß − Tkalt
Temperaturgefälle ΔT
div(κ∇T ) = −ΠQ
J Q = −κ∇T
−∇T
rot ∇T = 0
div J Q = ΠQ
(J Q , κ, −∇T )
stationärer Wärmefluss
60
1.5 Das Randwertproblem der Potentialtheorie