Kinematik - Lehrstuhl für Didaktik der Physik
Werbung

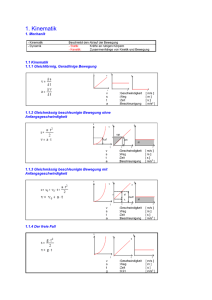
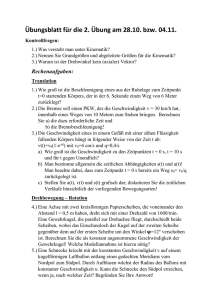
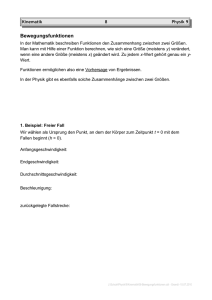
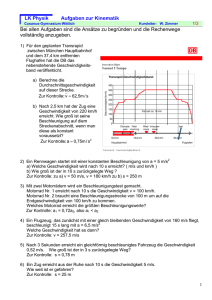
1 Kinematik 1.0 Intention Ort, Geschwindigkeit und Beschleunigung eines Körpers zu jedem Zeitpunkt beschreiben. y r (t ) ey e ez x Ortsvektor: r (t ) x z 1 R. Girwidz 1 Kinematik 1.1 Eindimensionale, geradlinige Bewegung Eindimensionales Koordinatensystem: 0 x1 x x2 Versuch: Rotierende Dose mit Markierungspunkt Versuch: Ball vor Tafel hochwerfen • Im Stehen • Im Gehen Vereinfachend erfolgt zunächst die Betrachtung: • von Massenpunkten (ausgedehnte Körper später) • in Inertialsystemen (erst später auch ein rotierendes Bezugssystem) R. Girwidz 2 –1 1 Kinematik 1.1.1 Durchschnittsgeschwindigkeit / mittlere Geschwindigkeit Versuch: Eisenbahn - Positionsmarken setzen - Metronom für Zeittakt Geschwindigkeitsmessung: 0 x1 x1(t1) v : Mittlere Geschwindigkeit = x x2 x2(t2) x x 2 x 1 x ( t 2 ) x ( t 1 ) t 2 t1 t 2 t1 t Wegstrecke Zeitintervall 3 R. Girwidz 1 Kinematik Daten aus dem Experiment in eine Wertetabelle aufnehmen: x/m t/s Grafische Darstellung im Zeit-Weg-Diagramm – x(t)-Diagramm x/m v2 v1 t/s R. Girwidz 4 –2 1 Kinematik x/m v2 v1 t/s v1 v2 v Ges Die Geschwindigkeit ist an der Steigung des Graphen im x(t)-Diagramm ablesbar. 5 R. Girwidz 1 Kinematik Weitere Möglichkeiten die Bewegungsabläufe zu registrieren Stroboskopaufnahme Film Markierungsstreifen R. Girwidz 6 –3 1 Kinematik 1.1.2 Die Momentangeschwindigkeit x t Rechnerisch: v lim t 0 x dx dt t Graphisch: Die Momentangeschwindigkeit zu einem bestimmten Zeitpunkt zeigt sich als die Steigung der Tangente an der x(t)-Kurve zu diesem Zeitpunkt. 7 R. Girwidz 1 Kinematik Exkurs: Ableitung einer Potenzfunktion x (t ) c t n d x (t ) dt d d c t n c t n c n t n 1 dt dt x Beispiel: x x (t ) b t n c v x b t R. Girwidz 8 –4 R. Girwidz 9 1 Kinematik Aufgabe: Durchschnittsgeschwindigkeit Ein Radfahrer fährt mit einer Geschwindigkeit von 15 km h-1 den Berg hinauf. Wie schnell muss er dieselbe Strecke zurückfahren, um insgesamt die doppelte Durchschnittsgeschwindigkeit, also 30 km h-1, zu erreichen? R. Girwidz 10 –5 1 Kinematik Aufgabe: Waldi Förster Knalle und sein Dackel Waldi gehen nach der Pirsch zurück zum Forsthaus. 100 m vor dem Haus führt der Weg aus dem Wald heraus auf eine freie Wiese. Waldi, der das Haus sieht, rennt vor bis zur Tür, dann jedoch, von Pflichtgefühl getrieben, zurück zu seinem Herrchen, wieder zur Tür und zurück usw., bis der Förster die Tür erreicht. Wie weit ist Waldi insgesamt gelaufen, wenn er viermal so schnell läuft wie der Förster geht? R. Girwidz 11 1 Kinematik Aufgabe: Flussreise Ein Lastkahn fährt zwischen zwei Flusshäfen die 100 km auseinander liegen hin und her. Er benötigt flussaufwärts 10 Stunden, flussabwärts nur 4 Stunden. Berechnen Sie die Strömungsgeschwindigkeit des Flusses und die Eigengeschwindigkeit des Bootes. R. Girwidz 12 –6 1 Kinematik Aufgabe: Flussreise Ein Lastkahn fährt zwischen zwei Flusshäfen die 100 km auseinander liegen hin und her. Er benötigt flussaufwärts 10 Stunden, flussabwärts nur 4 Stunden. Berechnen Sie die Strömungsgeschwindigkeit des Flusses und die Eigengeschwindigkeit des Bootes. 13 R. Girwidz 1 Kinematik 1.2.3 Die Beschleunigung (Maß für die zeitliche Änderung der Geschwindigkeit) Mittlere Beschleunigung: (Geschwindigkeitsänderung / Zeitintervall) Momentanbeschleunigung: dv v d v (t ) v x t 0 t dt dt a lim Beispiel: R. Girwidz v x 3ct 2 a v 6ct 14 –7 1 Kinematik Zusammenhänge zwischen x,v und a • Schiefe Ebene • beliebige Bewegung Wie lässt sich von der Beschleunigung a auf die Geschw. v schließen? Bekannt: dv a dt "Umkehrung" der Differentiation nötig. 15 R. Girwidz 1 Kinematik Exkurs: Integration einer Potenzfunktion F (x ) f (x )dx ; Stammfunktion F (x ) (u x n ) dx u x n dx x n 1 u c n 1 Integrationskonstante "enthält" Anfangsbedingungen R. Girwidz 16 –8 1 Kinematik Bewegung mit konstanter Beschleunigung a konst a t v a dt * 0 a t v v 0 a t t v v a t v 0 t 17 R. Girwidz 1 Kinematik Bewegung mit konstanter Beschleunigung t x vdt * 0 1 at 2 v 0 t 2 1 2 x x 0 at 2 v 0 t x 1 2 x at 2 v 0 t x 0 t R. Girwidz 18 –9 1 Kinematik Fahrbahn x-x0 x0 4x0 9x0 10 40 90 v0 2v0 3v0 ∆t v s t 19 R. Girwidz 1 Kinematik Zusammenhang zwischen v und x Einfacher Fall: x0 0; v0 0; (d.h. Start vom Ursprung) (d.h. Bewegung aus dem Stand) v a t 1 x at 2 2 t v ; a 1 v2 2 a2 x a v 2 2a x Allgemein: R. Girwidz v 2 v 02 2ax 20 –10 1 Kinematik Freier Fall: R. Girwidz 21 1 Kinematik Freier Fall: R. Girwidz 22 –11 1 Kinematik Freier Fall: R. Girwidz 23 1 Kinematik Freier Fall: R. Girwidz 24 –12 1 Kinematik Freier Fall: R. Girwidz 25 1 Kinematik Fallbewegung: R. Girwidz 26 –13 1 Kinematik Freier Fall: R. Girwidz 27 –14 1 Kinematik 1.2 Bewegung in zwei und drei Dimensionen 1 R. Girwidz 1 Kinematik 1.2.1 Exkurs rechnen mit Vektoren (I) Schreibweise ax a ax ex ay ey azez ay ; a z Betrag / "Länge" 2 2 2 a a a ax ay az R. Girwidz 2 –1 1 Kinematik Addition ax bx ax bx c a b ay by ay by ; a b a b z z z z Multiplikation mit Skalar x ax c x a x ay ; x a z 3 R. Girwidz 1 Kinematik x, v, a sind gerichtete Größen => genauer x, v, a ; Beispiel: Senkrechter Wurf nach oben R. Girwidz 4 –2 1 Kinematik 1.2.2 Kinematik mit Vektoren r dr r v lim t 0 t dt rx d d r ry dt dt rz dr dr dr x ex y ey z ez dt dt dt vx Zerlegung in Komponenten - „einfach Komponenten differenzieren“ ( ! nur im kart. Koordinatensystem ! ) 5 R. Girwidz 1 Kinematik Beschleunigung: a v r dr x dr y dr z ex ey ez dt dt dt (Zerlegung in Komponenten) ax R. Girwidz 2 d 2r x d r y d 2r z e ey 2 ez x dt 2 dt 2 dt 6 –3 1 Kinematik 1.2.3 Superpositionsprinzip Bewegungsabläufe lassen zusammengesetzt aus Teilbewegungen beschreiben 7 R. Girwidz 1 Kinematik Superpositionsprinzip – Addition von Geschwindigkeiten R. Girwidz 8 –4 1 Kinematik Superpositionsprinzip – Addition von Geschwindigkeiten 9 R. Girwidz 1 Kinematik Superpositionsprinzip – der schiefe Wurf R. Girwidz 10 –5 1 Kinematik Superpositionsprinzip – der schiefe Wurf 11 R. Girwidz 1 Kinematik Superpositionsprinzip – der schiefe Wurf Bahnkurve (Wurfparabel) 0 a g ; 0 R. Girwidz 12 –6 1 Kinematik Superpositionsprinzip – der schiefe Wurf Bahnkurve (Wurfparabel) 0 a g ; 0 v 0x v v 0y gt ; 0 13 R. Girwidz 1 Kinematik Superpositionsprinzip – der schiefe Wurf Bahnkurve (Wurfparabel) 0 a g ; 0 v 0x v v 0y gt ; 0 v 0 x t x 1 2 r v 0y t gt y ; 2 z 0 R. Girwidz 14 –7 1 Kinematik Der schiefe Wurf a) Bahnkurve 15 R. Girwidz 1 Kinematik Der schiefe Wurf a) Bahnkurve (y(t)-Kurve) 1 1) y v 0y t gt 2 2 t eliminieren 2) x v 0 x t t x v 0x in 1) y v 0 y y (x ) v 0y 1 g 2 x x v 0x 2 v 02x x 1 x2 g v 0 x 2 v 02x (Wurfparabel) 1 x2 y (x ) tan 0 x g 2 2 v 0 cos 2 0 R. Girwidz 16 –8 1 Kinematik Der schiefe Wurf b) Steighöhe 17 R. Girwidz 1 Kinematik Der schiefe Wurf b) Steighöhe ! v y (t s ) 0 v 0y g t s 0 ts v 0y g Steigzeit 1 2 y max y (t s ) v 0y t s g t s2 R. Girwidz v 02y 1 v 02y 1 v 02y 1 v 02y g 2 sin 2 0 2 g 2 g g 2 g 18 –9 1 Kinematik Der schiefe Wurf c) Wurfweite 19 R. Girwidz 1 Kinematik Der schiefe Wurf c) Wurfweite v 0y g v sin 0 2v 0 cos 0 0 g x W x (2t s ) v 0 x 2 v 02 2 sin 0 cos 0 g v 02 sin(2 0 ) x W ( 0 ) g Wurfweite abh. von Abwurfgeschwindigkeit und Abwurfwinkel R. Girwidz 20 –10 1 Kinematik Der schiefe Wurf d) Maximale Wurfweite 21 R. Girwidz 1 Kinematik Der schiefe Wurf d) Maximale Wurfweite x W maximal für : sin( 2m ) 1 2m m R. Girwidz 2 4 45 22 –11 1 Kinematik 1.2.4 Kinematik der Kreisbewegung Beispiele: Kurvenfahrt mit dem Auto, Volksfest, Erdbahn, Mondbahn 23 R. Girwidz 1.2.4 Kinematik der Kreisbewegung Winkel Gradeinteilung b φ b r [φ]: Radiant (rad) Bogenmaß R. Girwidz r Länge b des Kreisbogens rad Länge r des Radius 24 –12 1.2.4 Kinematik der Kreisbewegung Winkel Umfang eines Kreises : b 2r 360 im Gradmaß entsprechen 2 im Bogenmaß (in Grad) 360 (in Bogenmaß) 2 Einheit des Bogenmaßes : 1 Radiant ˆ 360 1 rad 2 360 57,3 2 25 R. Girwidz 1 Kinematik Exkurs: Ebene Polarkoordinaten R. Girwidz 26 –13 1 Kinematik 1.2.4 Kinematik der Kreisbewegung Beschreibung der Kreisbewegung in Polarkoordinaten r konst . ; (t ); ______________ 27 R. Girwidz 1 Kinematik 1.2.4 Kinematik der Kreisbewegung Beschreibung der Kreisbewegung in Polarkoordinaten r konst . ; (t ); ______________ x (t ) r cos (t ) ; y (t ) r sin (t ) ; R. Girwidz 28 –14 1 Kinematik Kreisbewegung - Geschwindigkeit 29 R. Girwidz 1 Kinematik Kreisbewegung – Geschwindigkeit: v lim t 0 r t r konst . r e t 0 t v lim R. Girwidz 30 –15 1 Kinematik Kreisbewegung – Geschwindigkeit: v lim t 0 r t r konst . r v lim e t 0 t d r e dt 31 R. Girwidz 1 Kinematik Kreisbewegung – Winkelgeschwindigkeit R. Girwidz – Definition: : d ; dt – für konst: 2 ; t T – genauer: ist Vektor 32 –16 1 Kinematik Kreisbewegung – Geschwindigkeit & Winkelgeschwindigkeit: – Spezialfall: konst; v konst. : v v r ; 2 ; T v x r sin t 0 ; v y r cost 0 ; 33 R. Girwidz 1 Kinematik Kreisbewegung - Beschleunigung R. Girwidz 34 –17 1 Kinematik Kreisbewegung - Beschleunigung v a lim t 0 t Spezialfall gleichförmige Kreisbewegung: r konst . a lim t 0 v (e r ) t 35 R. Girwidz 1 Kinematik Kreisbewegung - Beschleunigung v a lim t 0 t Spezialfall gleichförmige Kreisbewegung: r konst . v (e r ) t (e r ) v (e r ) v lim t 0 t a lim t 0 R. Girwidz 36 –18 1 Kinematik Kreisbewegung - Beschleunigung v a lim t 0 t Spezialfall gleichförmige Kreisbewegung: r konst . v a lim (er ) t 0 t v lim (er ) v (er ) t 0 t 2 v a r 2 (er ) t (er ) r 37 R. Girwidz 1 Kinematik Kreisbewegung - Beschleunigung v a lim t 0 t Spezialfall gleichförmige Kreisbewegung: 2 v a r 2 (er ) t (er ) r 2 v a a r 2 t ; r Radialbeschleunigung, Zentripedalbeschleunigung, Zentralbeschleunigung R. Girwidz 38 –19 1 Kinematik Allgemein R. Girwidz 39 –20