Einführung in die elektrische Antriebstechnik
Werbung

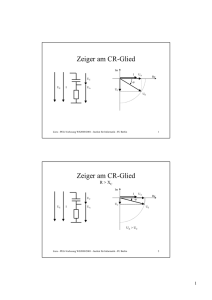
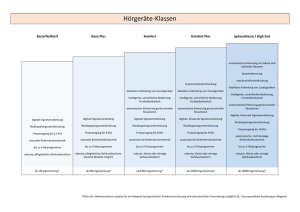
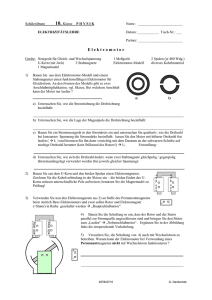
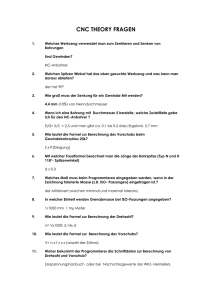
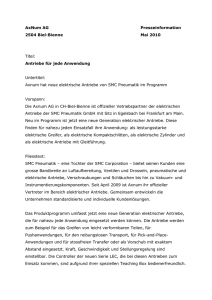
ANTEIN, J.Best, WS2000/01 Seite 1 Einführung in die elektrische Antriebstechnik 1 Elektrische Antriebssysteme Elektrische Antriebe begegnen uns heute in vielfältiger Form. Kleinste Leistungen im Mikrowatt-Bereich (Armbanduhr) bis hin zum Megawatt-Bereich (Lokomotive, Walzwerk) sind nicht ungewöhnlich. Auch die „Qualität“ der Antriebsaufgabe umfasst einen großen Bereich vom einfachen Spielzeugantrieb bis zur anspruchsvollen Lageregelung in der Werkzeugmaschine. Von dieser breiten Palette von Anwendungen behandeln wir schwerpunktmäßig den Bereich der „industriellen“ Antriebstechnik. Wir betrachten ein typisches elektrisches Antriebssystem: Netz SR M Getriebe AM Prozessgrößen: ON/OFF NIST, XIST IIST Stromregelung ISOLL Motorregelung MSOLL e.g. Lage, Druck,... Prozessregelung Bild 1 Typische Struktur eines Antriebssystems Im oberen Teil von Bild 1 ist die Leistungsebene dargestellt: Es wird Energie vom Netz zur „Arbeitsmaschine“ transportiert (oder umgekehrt). Der untere Teil der Abbildung zeigt die zugehörige Signalverarbeitung: Hier fließt (im Wesentlichen) keine Energie sondern Information (Signale). Leistungsebene: Die elektrische Energie kommt z.B. aus dem Netz (oder wird in das Netz zurückgespeist). Statt einem Netz kann auch eine Batterie vorhanden sein. Ein elektronisches Leistungsstellglied (SR = Stromrichter) verbindet das Netz mit der elektrischen Maschine M. Auf der mechanischen Seite ist die elektrische Maschine (eventuell über ein Getriebe) mit der Arbeitsmaschine AM verbunden. Signalverarbeitung: Den einzelnen Teilen der Leistungsebene sind Funktionen der Signalverarbeitung zugeordnet. Im Allgemeinen ist eine Stromregelung vorhanden, die Einschaltsignale an die Leistungselektronik liefert (Zündimpulse bei Thyristoren bzw. PWM-Signale bei Transistoren). Die Stromregelung prägt Ströme in die Zuleitungen des Motors ein. Bei digitaler Realisierung der Stromregelung sind Abtastraten zwischen 25 µs (digitaler Drehstromantrieb) und 3ms (netzgeführter Stromrichter) üblich. ANTEIN, J.Best, WS2000/01 Seite 2 Die Motorregelung liefert den/die Stromsollwert(e) an die Stromregelung, damit die elektrische Maschine ein bestimmtes Moment erzeugt. Oft werden dazu mechanische Größen erfasst (Drehzahl, Lage). Diese mechanischen Größen stehen natürlich auch der übergeordneten Prozessregelung zur Verfügung (in Bild 1 nicht dargestellt). Bei digitaler Realisierung der Motorregelung sind Abtastraten zwischen 250 µs und 5 ms üblich. Die Prozessregelung schließlich ist dafür verantwortlich, dass die Regelaufgabe des Antriebs innerhalb des Prozesses, an dem oft viele Antriebe beteiligt sind, erfüllt wird. Dazu erfasst sie die notwendigen Prozessgrößen und bildet daraus z.B. den Momentensollwert für die Motorregelung. Bei digitaler Realisierung der Prozessregelung sind Abtastraten zwischen 250 µs (anspruchsvolle Lageregelung) und 5 ms (Drehzahlregelung in einem Walzwerk) üblich, für langsame Prozessgrößen kann die Abtastrate noch weit langsamer sein. Die grobe Darstellung der Signalverarbeitung in Bild 1 läßt regelungstechnisch das Prinzip der Kaskadenregelung erahnen: Schnelle Regelkreise (e.g. Stromregelung) sind den übergeordneten Regelkreisen (e.g. Drehzahlregelung) unterlagert. Das Prinzip der Kaskadenregelung ist in der Antriebstechnik weit verbreitet und hat sich allgemein bewährt. Die Prozessregelung ist meist verteilt ausgeführt, d.h. jedem Antrieb ist ein Teil der Prozessregelung (z.B. die Drehzahlregelung) zugeordnet und eine übergeordnete „Leittechnik“ gibt die Sollwerte für die einzelnen Antriebe vor. In modernen Anlagen kommuniziert die Leittechnik mit den dezentralen Teilen der Signalverarbeitung digital über einen Feldbus. Welche Funktionen zentral und welche dezentral erledigt werden hängt vom Automatisierungskonzept ab. Oft (klassisch) ist der Drehzahlsollwert die Schnittstelle zum dezentralen Teil, bei einigen neuen Konzepten befindet sich aber z.B. eine Lageregelung im Antrieb, so dass die übergeordnete Steuerung Lagesollwerte vorgeben kann. 2 Geregelte und ungeregelte Antriebe In Bild 1 ist ein geregelter Antrieb dargestellt. Die elektrische Maschine wird über ein Leistungsstellglied betrieben und eine Regelung sorgt dafür, dass gewünschte Prozessgrößen eingehalten werden. Eine Vielzahl von Antrieben wird aber ungeregelt betrieben: Das Leistungsstellglied und natürlich auch die Regelung entfällt; der Motor, z. B. eine Asynchronmaschine, wird direkt am Netz betrieben. Ein Antrieb kann drehzahlveränderlich und dennoch ungeregelt betrieben werden. Dies ist z.B. dann der Fall, wenn ein Frequenzumrichter zwar eine einstellbare Frequenz und Spannung liefert, die Drehzahl des Antriebs aber nicht erfasst wird. Dann ist das Kriterium einer Regelung nicht erfüllt. Auch viele kleine Gleichstrommaschinen werden ohne Regelung direkt an einer Batterie betrieben. Beispiele finden wir u.a. im Kfz (Anlasser, Scheibenwischermotor, Lüftung, Antriebe für Fensterheber etc.) Auch große Antriebe wurden früher ohne Leistungselektronik betrieben, ANTEIN, J.Best, WS2000/01 Seite 3 z.B. in Lokomotiven und Straßenbahnen mit „Schaltwerk“. Dann sind meist besondere Einrichtungen zum „Anlassen“ und zum Stellen notwendig (Vorwiderstände etc.). Bei größeren Antrieben oder wenn die Antriebsaufgabe anspruchsvoll ist, oder auch wenn nicht immer die maximale Antriebsleistung benötigt wird, werden heute meist geregelte oder drehzahlveränderliche Antriebe verwendet. Die dazu erforderliche Leistungselektronik und die zugehörige Signalverarbeitung ist dazu meist in einem Gerät zusammengefasst. Solche Geräte werden z. B. als „Antriebsregelgerät“ bezeichnet, manchmal nennt man sie auch (je nach Anwendungsgebiet) „Stromrichter“, „Wechselrichter“ oder „Verstärker“ und meint damit das komplette Gerät und nicht nur den Leistungsteil. Die EMV-Produktnorm EN 61800-3 verwendet die Begriffe Basic Drive Module (BDM) für das Antriebsregelgerät, Complete Drive Module (CDM) für das BDM einschließlich Hilfseinrichtungen (Drosseln, Schütze, Trafos) und Power Drive System (PDS) für den gesamten Antrieb einschließlich Motor, Sensoren und Verkabelung. 3 Antriebsregelgeräte In Bild 2 sind am Beispiel eines Gleichstromantriebs mit netzgeführtem Stromrichter typische Bestandteile eines solchen Antriebsregelgerätes dargestellt. Der Anker der Gleichstrommaschine wird über einen 6-pulsigen Umkehrstromrichter in Drehstrombrückenschaltung betrieben. Die dargestellten Kommutierungsdrosseln, das Netzschütz und die Sicherungen sind dabei in der Regel nicht Bestandteil des Antriebsregelgerätes. Das Feld wird von einer halbgesteuerten 2-pulsigen Brückenschaltung versorgt. Die eigentliche Signalverarbeitung wird heute meist von einem oder mehreren Mikrocontrollern ausgeführt. 3.1 Leistungsteil-Interface Zwischen Signalverarbeitung und Leistungsteil ist ein Interface geschaltet, das Messgrößen aus dem Leistungsteil aufbereitet (z. B. Netzspannung UN, Ankerspannung UA, Ankerstrom IA, Feldstrom IF etc. und andererseits Zündimpulse an die Thyristoren liefert und die Schütze für Ankerstromrichter und Feldstromrichter ansteuert. Die Signalverarbeitung tauscht mit dem Interface Binärsignale mit 5-Volt-Pegel und „saubere“ Analogsignale aus. Das Interface sorgt gegebenenfalls für Potenzialtrennung und Leistungsverstärkung (Zündimpulse, Ansteuerung Schütze). 3.2 Netzteil Ein Antriebsregelgerät benötigt eine Hilfsenergieversorgung oder Netzteil, das die Versorgungsspannungen für Signalverarbeitung und Interfaces liefert. Meist sind dies 5 Volt für die Digitaltechnik (Mikrocontroller und seine Peripherie), ±15 Volt für die Analogtechnik und 24 Volt für Binärsignale und Zündimpulse. In Bild 2 wird das Netzgerät vom gleichen Netz versorgt , an dem auch der Leistungsteil hängt, aber die Versorgung bleibt auch dann bestehen, wenn z.B. eine der Sicherungen in den Zuleitungen zum Leistungsteil fällt. Das Netzgerät muss auch vor dem Hauptschütz angeschlossen sein, wenn das Antriebsregelgerät selbst sein ANTEIN, J.Best, WS2000/01 Seite 4 L1, L2, L3 FELDSTROMRICHTER ANKERSTROMRICHTER UN, UA,, IA, IF ZÜNDIMPULSE TACHO INTERFACE NETZTEIL 5V-SIGNALE, ANALOGSIGNALE L1, L2, L3, N SIGNALVERARBEITUNG (MIKROCOMPUTER) KONVENTIONELLE SCHNITTSTELLE FELDBUSSCHNITTSTELLE Bild 2 Typische Bestandteile eines Antriebsregelgerätes LOKALE BEDIENUNG PCSCHNITTSTELLE ANTEIN, J.Best, WS2000/01 Seite 5 Hauptschütz bedienen soll. Auf jeden Fall ist es wünschenswert, wenn die Hilfsenergieversorgung auch dann aufrecht erhalten bleibt, wenn der Antrieb infolge einer Störung abschaltet. Nur so kann die Kommunikation mit dem Leitsystem aufrecht erhalten bleiben. Es gibt auch Konzepte das Netzteil nicht, wie in Bild 2 mit 230V Wechselspannung zu versorgen, sondern mit 24V Gleichspannung. Dies ist zum Teil bei den Antriebsregelgeräten in Werkzeugmaschinen üblich. Insbesondere, wenn man auch die Steuerung mit 24V Gleichspannung versorgt, ist es so viel leichter möglich, bei Bedarf die gesamte Signalverarbeitung bei Netzspannungsausfall am Leben zu erhalten. Bei über Wechselrichter betriebenen Drehstromantrieben („Frequenzumrichter“) gibt es meist einen Gleichspannungszwischenkreis, der außerdem über Kondensatoren gepuffert ist. Manchmal wird das Netzteil dann über diesen Zwischenkreis versorgt. Bei einem Netzspannungsausfall kann dann wenigstens noch für die Zeit, in der noch Energie im Zwischenkreis ist, die Hilfsenergieversorgung aufrecht erhalten werden. Obwohl also das Netzteil im allgemeinen ein Schattendasein führt, ist das richtige Konzept doch wichtig für das Gesamtsystem. 3.3 Konventionelle Schnittstelle Auf der „Anwenderseite“ hat das Antriebsregelgerät meist eine konventionelle Schnittstelle (Binär I/O, meist in 24V-Technik, analoge Sollwerteingänge, eventuell auch Analogausgänge). Bei einer typischen konventionellen Schnittstelle bekommt der Antrieb einen analogen Drehzahlsollwert (meist ±10V) und einige binäre Signale wie z.B. „EIN/AUS“, „START/STOPP“ etc. Der Antrieb liefert binäre Statusinformation z.B. „BEREIT“, „STÖRUNG“ etc. an die Steuerung. Darüberhinaus wird die konventionelle Schnittstelle auch zur Ein/Ausgabe von Prozesssignalen benötigt. Beispiele sind ein Binärausgang zum Ansteuern einer mechanischen Bremse, Binäreingänge zum Abfragen von Endschaltern, (eventuell spezielle) Analogeingänge zum Erfassen von Temperaturen etc. 3.4 Feldbusschnittstelle Moderne Antriebsregelgeräte sind (meist optionell) mit einer Feldbusschnittstelle ausgestattet. Dann bekommt das Antriebsregelgerät seine Sollwerte und Steuerbefehle (Ein/Aus etc.) über serielle Telegramme vom übergeordneten Leitsystem (Steuerung) und liefert umgekehrt auch auf diesem Wege Istwerte und Statusinformation an das Leitsystem zurück. Eventuell können über die Feldbusschnittstelle die Antriebsregelgeräte auch untereinander Information austauschen. Ob dies möglich ist, hängt von der Art des Feldbussystems ab. Die Feldbusschnittstelle macht die konventionelle Schnittstelle, soweit sie nicht für Prozesssignale benötigt wird, überflüssig. Sie spart nicht nur Verkabelungsaufwand, sondern ermöglicht z.B. auch noch nachträgliche Änderungen im Signalaustausch, ohne dass die Verkabelung geändert werden muss. Ohne Mehraufwand kann zusätzliche Information übertragen werden. So ist meist ein Verstellen von Parametern möglich und es kann detaillierte Diagnoseinformation an die Leitebene geliefert werden. Schließlich können Soll- und Istwerte mit höherer Auflösung übertragen werden, als dies über die konventionelle Schnittstelle praktikabel wäre. ANTEIN, J.Best, WS2000/01 Seite 6 Es gibt firmenspezifische Feldbusse, über die allerdings nur Geräte eines Herstellers (Steuerungen und Antriebe) kommunizieren können. Solche Systeme findet man vorwiegend im Anlagenbereich. Große Hersteller, die z.B. ganze Walzwerke elektrisch ausrüsten, haben meist solche Systeme entwickelt. In diese Systeme ist das „Know-how“ von vielen Anwendungen eingeflossen, so dass die Anforderungen optimal erfüllt werden. Bei solchen großen Anwendungen ist heute die digitale Signalübertragung zwischen Steuerungen und Antrieben über Feldbusse bereits weit verbreitet. Daneben gewinnen offene Feldbusse immer mehr an Bedeutung. „Offen“ bedeutet hier, dass Komponenten verschiedener Hersteller zusammengeschaltet werden können. Manche dieser offenen Systeme sind ursprünglich als firmenspezifische Lösungen entstanden, andere wurden von vornherein als offene Feldbusse spezifiziert und dann meist auch genormt. Die meisten offenen Feldbusse wurden nicht speziell für die Antriebstechnik entwickelt, da aber die elektrische Antriebstechnik in der Prozessautomatisierung eine wichtige Rolle spielt, wurden deren Bedürfnisse mehr oder weniger berücksichtigt. Beispiele für Feldbusse sind (alphabetisch, ohne Bewertung und ohne Anspruch auf Vollständigkeit): - CAN CANopen DeviceNet (Allen Bradley) SDS (Smart Distributed Systems, Honeywell) - Interbus-S - Modbus - Profibus - Sercos Interface Welcher Feldbus zum Einsatz kommt, hängt nicht nur von seinen jeweiligen technischen Eigenschaften ab, sondern von der Verfügbarkeit von Komponenten für ein bestimmtes System. Oft wird der Kunde einen bestimmten Feldbus vorschreiben, so dass Antriebshersteller meist gezwungen sind, mehrere verschiedene Feldbusse zu unterstützen. 3.5 Signalverarbeitung In Bild 2 ist unterstellt, dass die Signalverarbeitung mit einem Mikrocontroller erfolgt. Dies muss nicht immer so sein; Antriebsregelgeräte gab es auch schon vor der Erfindung des Mikroprozessors und es gibt auch heute noch Antriebe, die ausschließlich mit analoger Signalverarbeitung auskommen. Auch sind Antriebsregelgeräte mit rein analoger Signalverarbeitung in ihren Regeleigenschaften keineswegs schlechter als Digitalgeräte. Viele netzgeführte Stromrichter mit digitaler Signalverarbeitung führen die Stromregelung im Takt der Zündimpulse, bei einem 50Hz-Netz also im Mittel nur alle 3,3ms aus. Bei analoger Signalverarbeitung wird der Stromregler im Prinzip beliebig schnell bearbeitet, wobei allerdings auch hier durch die abtastende Arbeitsweise des Stellgliedes (netzgeführter Stromrichter) der Nutzen dieser beliebig schnellen Bearbeitung beschränkt bleibt. Trotzdem kostet es schon einige Mühe hier bei digitaler Signalverarbeitung etwa die Regelqualität eines guten Analoggerätes zu erreichen. Der Nutzen der Digitaltechnik für die Regelungstechnik zeigt sich dann, wenn komplexe Regelalgorithmen zu erledigen sind, wie dies z.B. bei der feldorientierten Regelung der Asynchronmaschine der Fall ist. ANTEIN, J.Best, WS2000/01 Seite 7 Digitale Signalverarbeitung unterscheidet sich von analoger Signalverarbeitung aber vor allem in der Handhabung. Bei analoger Signalverarbeitung erfolgt die Inbetriebnahme (Anpassung an Motor und Arbeitsmaschine) z.B. durch Einstellen von Potentiometern und Einlöten von Widerständen und Kondensatoren, deren Werte zuvor typischerweise mit Hilfe von „Inbetriebnahme-Kästchen“, Widerstandsdekaden etc. ermittelt wurden. Dies klingt zunächst schlimmer als es ist: Man muss auch bedenken, dass es viele Serienanwendungen gibt, bei denen die Ermittlung dieser Werte nur einmal bei der Erstinbetriebnahme erfolgen muss, für alle weiteren Anwendungen müssen diese Werte nur übernommen werden. Dabei ist es vorteilhaft, wenn alle Potentiometer und anzupassenden Bauelemente auf einer eigenen, möglichst steckbaren Leiterplatte, einem sogenannten „Motorprint“ untergebracht sind. Dies löst übrigens auch das wichtige Serviceproblem: Geht ein Antriebsregelgerät defekt und muss ausgetauscht werden, so braucht man nur das Motorprint und damit alle Einstellungen des defekten Gerätes in das neue Gerät zu übernehmen. Bei einem Digitalgerät werden die Einstellungen (Parameter) in einem nichtflüchtigen Speicher abgelegt. Dies kann ein EEPROM, ein FLASH-PROM oder (seltener) ein batteriegepuffertes RAM sein. Dazu muss der Anwender oder Inbetriebnehmer eine Möglichkeit haben, diesen Parameterspeicher zu beschreiben. Dies kann über eine lokale Bedienung erfolgen, die typischerweise aus einer LED- oder LCD-Anzeige und einigen wenigen Tasten besteht. Diese lokale Bedienung kann fest in das Gerät eingebaut sein oder als separate (weglassbare) Einheit zur Verfügung stehen. Eine Alternative besteht darin, den Antrieb mit einer geeigneten Schnittstelle zu versehen (z.B. RS232), über die ein Personalcomputer (PC), vorzugsweise ein Laptop, angeschlossen werden kann. Hiermit ist nicht nur eine komfortablere Bedienung über ein geeignetes Inbetriebnahme- und Diagnoseprogramm möglich; nach erfolgter Inbetriebnahme können die Parameter auf Datenträger (e.g. Diskette) gesichert werden und bei Bedarf in weitere Antriebe geladen werden. Dem bereits beim Analogantrieb angesprochenen Serviceproblem muss beim Digitalantrieb noch viel größere Beachtung geschenkt werden: Geht ein Digitalgerät defekt und es wurde versäumt, die eingestellten Parameter in irgendeiner Form zu sichern (auf Datenträger oder Papier, notfalls durch Aufschreiben), so ist ein Gerätetausch problematisch. Dies gilt um so mehr, als ein Digitalgerät meist sehr viele Parameter (z.B. 100) hat. Ein Digitalantrieb kann über die Möglichkeit einer Anwenderprogrammierung verfügen. Die Firmware (so nennt man die im Antrieb „fest“ abgelegte Software) verfügt dann über sogenannte Funktionsblöcke. Das sind Programmteile, die bestimmte Funktionen erfüllen, von einfachen logischen Verknüpfungen bis hin zu Reglern oder noch komplexeren Bausteinen. Diese Funktionsblöcke können vom Anwender aktiviert werden und die Ein- und Ausgänge der Funktionsblöcke können vom Anwender zu komplexen Applikationen verbunden werden. Liegt eine solche Anwenderprogrammierung vor, so gelten für den Servicefall ähnliche Überlegungen, wie für die Parameter: Es muss dafür gesorgt werden, dass bei einem notwendigen Gerätetausch das Anwenderprogramm für den neuen Antrieb zur Verfügung steht. Schließlich ist es bei einem Digitalgerät möglich, dass verschiedene Firmwareversionen vorliegen. Dies ist, verglichen mit dem Analoggerät, wie eine andere Hardware zu betrachten: Bei einem Gerätetausch muss dafür gesorgt werden, dass das Ersatzgerät über die gleiche oder eine aufwärtskompatible Firmware verfügt. Die Firmware ist meist in einem (oder mehreren) EPROM oder FLASH-PROM abgelegt. Im Falle des FLASH-PROMs kann es möglich sein, über die PC-Schnittstelle eine andere Firmware zu laden. ANTEIN, J.Best, WS2000/01 Seite 8 Die soeben diskutierte Problematik, wie sie im Servicefall bei einem Digitalgerät entstehen kann, wird manchmal so gelöst, dass man den Parameterspeicher und eventuell auch den Firmwarespeicher in ein steckbares Speichermodul, vergleichbar dem „Motorprint“ beim Analogantrieb, einbaut. In der Regel ist dann ein Gerätetausch unproblematisch. Allerdings muss man auch mit dem Fall rechnen, dass das Speichermodul selbst defekt geht oder die Speicher ungewollt beschrieben werden. Für diesen Fall ist es trotzdem notwendig, dass zusätzlich auf andere Art Einstellparameter und gegebenenfalls Anwenderprogramme gesichert wurden. Ein wichtiger Vorteil digitaler Signalverarbeitung besteht in den Möglichkeiten, die eingebaute „Intelligenz“ des Rechners zu nutzen. So ist es üblich, dass Digitalgeräte über Prozeduren zur Ermittlung der Regelparameter verfügen („Selbsteinstellung“). Mit dem Mikrocomputer können auch leicht Hilfsmittel zur Diagnose implementiert werden. Ein Beispiel dafür ist ein in Software realisierter Transientenrecorder, der beim Eintreffen von wählbaren Triggerbedingungen interne Werte im RAM ablegt. Der Zeitverlauf dieser Größen kann dann mit dem angeschlossenen InbetriebnahmePC angesehen werden. Ist die serielle Kommunikation zwischen Antrieb und Inbetriebnahme-PC schnell genug, so ist es sogar möglich, den Zeitverlauf „online“ am PC darzustellen. In vielen Fällen wird man dann bei Inbetriebnahme und Fehlersuche auf Hilfsmittel wie herkömmliche Messgeräte und Oszilloskope verzichten können. 4 Getriebe In Bild 1 ist zwischen Motor und Arbeitsmaschine ein Getriebe geschaltet. Es soll nun diskutiert werden wann und wozu dies notwendig ist. In Bild 3 ist dieses Detail noch einmal dargestellt: ω1 M Getriebe M1 η ω2 AM M2 Bild 3 Getriebe zwischen Motor und Arbeitsmaschine Das Getriebe hat hier die Aufgabe, die Drehzahl n1 (bzw. die Winkelgeschwindigkeit ω1 ) des Motors in die Drehzahl n2 (bzw. die Winkelgeschwindigkeit ω2 ) umzusetzen. Zwischen Drehzahl n und Winkelgeschwindigkeit ω besteht folgender Zusammenhang: ω=2πn (4.1) ANTEIN, J.Best, WS2000/01 Seite 9 Die Winkelgeschwindigkeit ist die Geschwindigkeit eines Punktes auf dem Einheitskreis (Kreis mit Radius r = 1). Im täglichen Leben (auch des Ingenieurs) gibt man üblicherweise die Drehzahl an. Man sagt „ein Motor hat die Drehzahl 1000 U/min oder 1000 min-1 oder 1000 rpm“ (rpm ist die englische Abkürzung für revolutions per minute). Kaum jemand sagt „die Winkelgeschwindigkeit des Motors beträgt 104,7 s-1 “, was etwa das Gleiche wäre. Trotzdem ist es im Zweifelsfall empfehlenswert, mit der Winkelgeschwindigkeit anstatt der Drehzahl zu rechnen. Diese stellt die physikalischen Gegebenheiten besser dar. Warum dies so ist, wollen wir uns klarmachen. Aus der Physik wissen wir, dass die Arbeit das Produkt aus Kraft und Weg ist: W=Fs (4.2) In (4.2) ist W (Work) die Arbeit, F (Force) die Kraft und s der Weg. Die Beziehung (4.2) gilt in dieser einfachen Form nur dann, wenn die Kraft F die gleiche Richtung wie der Weg s hat, und über den gesamten Weg konstant ist. Sind diese Bedingungen nicht erfüllt, so gilt: ! ! W = ∫ F ⋅ ds b (4.3) a Die Arbeit ist das Wegintegral über das skalare Vektorprodukt aus Kraft und Wegelement. Für unsere einfachen Überlegungen genügt aber die Beziehung (4.2). Die Leistung P (Power) ist bekanntlich die zeitliche Ableitung der Arbeit: P= dW F ⋅ ds = = F⋅v dt dt (4.4) Die (mechanische) Leistung ist also gleich dem Produkt aus Kraft und Geschwindigkeit, wobei auch hier wieder gilt, dass Kraft F und Geschwindigkeit v (velocity) gleiche Richtung haben müssen. ω r v F Bild 4 Umsetzung in eine Drehbewegung ANTEIN, J.Best, WS2000/01 Seite 10 Bild 4 zeigt die Umfangskraft F, die an einer Scheibe mit Radius r angreift. Dadurch wirkt das Moment M= rF (4.5) auf die Scheibe. Andererseits bewegt sich ein Punkt auf dem Umfang der Scheibe mit dem rfachen der Winkelgeschwindigkeit (ein Punkt im Abstand r = 1 bewegt sich genau mit Winkelgeschwindigkeit): v=ωr (4.6) Wir lösen (4.5) nach F auf und setzen dies und die Beziehung (4.6) in (4.4) ein: P = Fv = M ⋅ rω = Mω r (4.7) Der Radius r kürzt sich weg und wir erhalten für die Leistung bei der Drehbewegung eine Beziehung, die formal genauso aussieht, wie bei der Linearbewegung, nur steht anstelle der Kraft das Moment und anstelle der Geschwindigkeit die Winkelgeschwindigkeit. Wollen wir die Leistung in Abhängigkeit von der Drehzahl ausdrücken, so können wir natürlich (4.1) in (4.7) einsetzen: P=2πnM (4.8) Jetzt taucht der Faktor 2 π auf und wir dürfen außerdem nicht vergessen, dass die Drehzahl ja üblicherweise in Minuten angegeben wird, weshalb wir beim Ausrechnen sorgfältig auf die Einheiten achten müssen. Wir kehren nun zur Betrachtung des Getriebes in Bild 3 zurück. Dort ist noch die Größe η eingetragen. Darunter versteht man den Wirkungsgrad, der folgendermaßen definiert ist: η= Pab Pzu (4.9) Der Wirkungsgrad ist also das Verhältnis von abgegebener zu zugeführter Leistung. Da die abgegebene Leistung stets kleiner sein muss als die zugeführte, ist η immer kleiner oder gleich eins. Wir müssen beachten, dass der Wirkungsgrad keine Konstante ist, sondern z.B. vom Moment abhängt: Bei Nennmoment ist der Wirkungsgrad größer als bei Teilbelastung. ANTEIN, J.Best, WS2000/01 Seite 11 Der Wirkungsgrad ist auch nicht einfach ein Faktor zwischen der Leistung P1 auf der Motorseite und der Leistung P2 auf der Seite der Arbeitsmaschine. Treibt der Motor die Arbeitsmaschine an, so ist P1 > P2 und es gilt η = P2 / P1 . Speist dagegen die Arbeitsmaschine Energie zurück und die elektrische Maschine arbeitet als Generator, so ist P2 > P1 und es gilt η = P1 / P2 . Wenn wir also den Wirkungsgrad berücksichtigen müssen, ist es notwendig, die Richtung des Energieflusses zu beachten. Bei einem verlustfreien Getriebe ( η = 1) gilt: P1 = P2 = ω 1 ⋅ M1 = ω 2 ⋅ M 2 = 2π ⋅ n1 ⋅ M1 = 2π ⋅ n2 ⋅ M 2 (4.10) M1 ω 2 n2 = = M 2 ω 1 n1 (4.11) Daraus folgt: Die Momente an den beiden Getriebeseiten sind also (bei η = 1) umgekehrt proportional zu den Winkelgeschwindigkeiten bzw. den Drehzahlen. Dies ist nicht weiter erstaunlich, sondern nur eine andere Form der Hebelgesetze. Eine Drehzahlerhöhung wird mit einer entsprechenden Verringerung des Momentes erkauft (und umgekehrt). Wir wollen nun der Frage nachgehen, warum man überhaupt Getriebe braucht. Kann man nicht den Motor so bauen, dass er das gewünschte Moment bzw. die gewünschte Drehzahl für die Arbeitsmaschine ohne Übersetzung durch ein Getriebe direkt liefert (Direktantrieb) ? Dazu betrachten wir zunächst das Grundprinzip jeder elektrischen Maschine, die Kraft auf einen stromdurchflossenen Leiter im Magnetfeld (Bild 5) B ϕ s i F Bild 5 Kraft auf einen stromdurchflossenen Leiter im Magnetfeld ANTEIN, J.Best, WS2000/01 Seite 12 Es gilt ! ! ! F = i⋅s × B (4.12) ! Darin gibt!der Vektor s Richtung und Länge des Leiters an, durch den der Strom i fließt, während B Richtung !und Intensität eines homogenen Magnetfeldes bestimmt. Auf den Leiter ! ! wird dann eine Kraft F ausgeübt, die senkrecht auf der! durch s und B aufgespannten Ebene steht. Für die Richtung gilt dabei die Schraubenregel: F zeigt in die Richtung, in die sich ! eine ! rechtsgängige Schraube dreht, wenn man s auf kürzestem Wege in die! Richtung von B dreht. ! ! Der Betrag von F ist dabei gleich dem Flächeninhalt des von s und B aufgespannten Parallelogramms, also: F = i ⋅ s ⋅ B ⋅ sin ϕ (4.13) Bild 6 zeigt nun das Prinzip eines Elektromotors: Bild 6 Prinzip des Elektromotors Die magnetischen Feldlinien treten radial auf der einen Seite des Rotors ein und auf der anderen Seite wieder aus. Auf der rechten Seite in Bild 6 fließt der Strom aus der Zeichnungsebene heraus, wir schauen auf die Spitzen der Zählpfeile, angedeutet durch Punkte in den Leitermittelpunkten. Drehen wir diese Pfeile auf kürzestem Weg in Richtung des magnetischen Feldes, so erkennen wir nach der Rechtsschraubenregel, dass die resultierenden Kräfte nach „oben“ gerichtet sind; genauer: Sie greifen radial am Rotor so an, dass ein Moment entgegen dem Uhrzeigersinn entsteht. Auf der linken Seite fließen die Ströme in die Zeichnungsebene hinein; wir schauen auf die Enden der Zählpfeile, dargestellt durch Kreuze. Drehen wir hier die Pfeile auf kürzestem Wege in Richtung des Magnetfeldes, so ergeben sich nach der Rechtsschraubenregel Kräfte, die nach unten gerichtet sind bzw. auch hier so am Rotor angreifen, dass ein Moment entgegen dem Uhrzeigersinn entsteht. ANTEIN, J.Best, WS2000/01 Seite 13 Wir wollen nun das Drehmoment des dargestellten Motors berechnen. Auf dem Rotor seien z Leiter gleichmäßig verteilt; die Länge des Rotors und der Leiter sei l . Da Strom und Feld senkrecht aufeinanderstehen, ist in Gleichung (4.13) ϕ = 90° und wir erhalten für die Kraft auf einen Leiter der sich im Feld befindet: FL = i l B (4.14) Da, wie aus Bild 6 hervorgeht, sich nicht alle Leiter gleichzeitig im Magnetfeld befinden, wird zur Berechnung der Summe aller Kräfte der Polbedeckungsfaktor α eingeführt. Dies ist eine Zahl, die kleiner als eins ist, und die diesen Sachverhalt berücksichtigt. Für die Summe aller Kräfte, die auf die z Leiter in Bild 6 einwirken, gilt: F = α ∑ FL = α z il B (4.15) Hat der Rotor den Radius r, so ergibt sich damit das Moment: M =rF = rα z il B (4.16) Wir denken uns nun den Strom i, der durch die z diskreten Leiter fließt, durch einen Strombelag a (Strom pro Länge) ersetzt: a= zi 2π r (4.17) Damit erhält man: M = 2α r 2 π l a B (4.18) Das Volumen des Rotors ist aber: V = π r2 l (4.19) Damit wird aus (4.18): M = 2α V a B (4.20) Darin ist α eine konstruktionsabhängige Konstante (<1), und sowohl Strombelag a, als auch die magnetische Flußdichte B können keine beliebig großen Werte annehmen. Der Strombelag ist dadurch begrenzt, dass die in der Wicklung entstehende Verlustwärme letztendlich über die Rotoroberfläche abgeführt werden muss und die magnetische Flussdichte ist wegen der Magnetisierungskennlinie ebenfalls begrenzt. Wenn auch der Polbedeckungsfaktor, der Strom- ANTEIN, J.Best, WS2000/01 Seite 14 belag und die magnetische Flussdichte konstruktionsbedingt in gewissen Grenzen schwanken können, d.h. bei der einen Motorkonstruktion etwas größere und bei der anderen etwas kleinere Werte annehmen, so hängt doch das erreichbare Drehmoment gemäß (4.20) im wesentlichen vom Volumen ab. Mit Gl. (4.7) erhalten wir für die Leistung: P = 2 α V a Bω (4.21) und für die Leistungsdichte: P V = 2 α a Bω (4.22) Wollen wir also eine hohe Leistungsdichte erzielen, so müssen wir den Motor mit hoher Drehzahl bzw. Winkelgeschwindigkeit betreiben, denn die anderen Größen in (4.22) können nur in engen Grenzen variiert werden. Ein Zahlenbeispiel soll ein ungefähres Gefühl für die Größenordnung der Leistungsdichte vermitteln: a = 100 A/cm, B = 1 Vs/m2 = 1 T, ω = 2 π 50 /s α = 0,5 (3000 Umdrehungen pro Minute) Daraus ergibt sich: P V = 2 ⋅ 0,5 ⋅ 100 P V = π ⋅ 106 A Vs ⋅1 ⋅ 100 π s cm m2 W ≅ 3MW m3 = 3kW dm3 3 m Wenn also die Arbeitsmaschine AM in Bild 3 nur niedrige Drehzahlen, verglichen mit den erlaubten Drehzahlen des Motors, benötigt, so kann es günstig sein, ein Getriebe einzusetzen, um mit einem möglichst kleinen Motor auszukommen. Es kann natürlich auch der umgekehrte (triviale) Fall vorliegen, dass die Arbeitsmaschine eine höhere Drehzahl verlangt, als für den Motor zulässig ist; insbesondere bei Gleichstrommaschinen ist die maximal zulässige Drehzahl begrenzt. Ein Beispiel wäre ein Prüfstand für Formel 1 - Rennmotoren, bei dem eine Gleichstrommaschine als Belastung dient. Auch dann ist ein Getriebe erforderlich. Dennoch wurde und wird oft auf ein Getriebe verzichtet und es kommen Direktantriebe zum Einsatz, manchmal auch im größeren Leistungsbereich. In technischen Museen kann man bisweilen kleinere Dampfkraftwerke bewundern, bestehend aus einer Kolbendampfmaschine und einem Synchrongenerator oder Gleichstromgenerator. Da die Dampfmaschine relativ langsam läuft, sind die elektrischen Maschinen riesig, gemessen an der Leistung. Große, langsam laufende Gleichstrommaschinen werden auch zum Antrieb von Minenaufzügen benutzt. ANTEIN, J.Best, WS2000/01 Seite 15 Langsam laufende Direktantriebe werden bisweilen auch in der Servotechnik bei speziellen Anwendungen benutzt (Torque-Motoren), wo man die störenden Einflüsse eines Getriebes vermeiden möchte. 5 Mehrmotorenantriebe In der Anfangszeit der Industrialisierung wurden oft mehrere Arbeitsmaschinen von einem Motor (z.B. Dampfmaschine) über Transmissionswellen und Riemen angetrieben. Daraus wurden dann im Laufe der Entwicklung Gruppenantriebe und schließlich Einzelantriebe. Da, wo koordinierte Bewegungen zu vollführen sind, wie in der Werkzeugmaschine, erfordert die Auflösung in einzelne Antriebe besondere technische Lösungen (numerische Steuerungen). Auch heute gibt es noch viele Maschinen, bei denen die Koordination der verschiedenen Bewegungen mechanisch erfolgt, z.B. bei der Druckmaschine durch die Längswelle (Königswelle) und entsprechende Getriebe. Hier beginnt sich allmählich moderne Antriebstechnik durchzusetzen mit lagegeregelten Einzelantrieben. 6 Eigenschaften elektrischer Antriebe Elektrische Antriebe haben einige besondere Eigenschaften, wodurch sie sich von anderen Antriebsarten (Verbrennungsmaschinen, hydraulische Antriebe, pneumatische Antriebe ) unterscheiden. Hier sind einige Stichworte zusammengestellt: • • • • • • • • • • • Energiezufuhr (stationär: einfach, Fahrzeuge: schwierig, Fahrdraht, Batterie, Brennstoffzelle) Umweltfreundlich Betrieb in beliebiger Umgebung (U-Boot, Mond-Auto, Marsmobil) Wirkungsgrad gut (Motor z.B. 95% für 90kW ASM, Umrichter 97%) Moment bei Drehzahl 0 (im Gegensatz zum Otto- oder Dieselmotor) Beide Drehrichtungen möglich (im Gegensatz zum Otto- oder Dieselmotor) Beide Momentenrichtungen möglich (Nutzbremsen, aber auch Positionieren, Motion Control) Hohe kurzzeitige Überlastbarkeit (Beschleunigungsantrieb) Ruhiger Lauf (weil rotationssymmetrisch) Gute Regelbarkeit (Bandanlagen, Automatisierungstechnik) Leistung/Gewicht schlechter als bei Hydraulik 7 Auswahlkriterien Bei der Auswahl eines elektrischen Antriebs sind viele Kriterien zu beachten, insbesondere sind die jeweils gültigen Normen und Vorschriften einzuhalten. Einige dieser Kriterien sind hier aufgelistet: • Geräusche • Netzrückwirkung • Betriebsart der Maschine (S1..S10: Dauerbetrieb, Kurzzeitbetrieb,.. siehe Bild 7) ANTEIN, J.Best, WS2000/01 • • • • • • • • Kühlart der Maschine (Selbst1-, Eigen2-, Fremdkühlung) Bauform des Motors (IM B3, IM V5, siehe Bild 8) Schutzart für den Motor (IP21, IP65: Berührung-, Fremdkörper-, Wasserschutz; Bild 9) Wärmeklasse (Isolierstoff) Ex-Schutz Schutzart für den Stromrichter (IP 21, ..) Belastungsklasse für den Stromrichter (I, ... VI nach EN 60146-1-1:1993; Bild 10) EMV-Gesichtspunkte Bild 7 Betriebsarten elektrischer Maschinen nach DIN VDE 0530 bzw. IEC 34 [1] 1 2 Seite 16 nur über Oberfläche Lüfter auf der Welle ANTEIN, J.Best, WS2000/01 Bild 8 Bauformen elektrischer Maschinen nach DIN IEC 34 [1] Seite 17 ANTEIN, J.Best, WS2000/01 Bild 9 Schutzarten elektrischer Maschinen [1] Seite 18 ANTEIN, J.Best, WS2000/01 Bild 10 Belastungsklassen von Stromrichtern nach EN 60146 (VDE 0558) [1] Seite 19 ANTEIN, J.Best, WS2000/01 Seite 20 Literatur [1] Brosch, Peter F.: Moderne Stromrichterantriebe: Arbeitsweise drehzahlveränderlicher Antriebe mit Stromrichtern / 3.,überarb. u. erw. Aufl. - Würzburg: Vogel, 1998 (Kamprath-Reihe) ISBN 3-8023-1735-1 [2] Hofer, Klaus: Regelung elektrischer Antriebe: Innovation durch Intelligenz / Berlin; Offenbach: VDE-Verlag, 1998 ISBN 3-8007-2234-8 [3] Leonhard, Werner: Control of Electrical Drives / 2. ed. Berlin; Heidelberg; New York: Springer, 1996 ISBN 3-540-59380-2 [4] Milde, Friedhelm: Vorlesung Elektrische Maschinen 1/ 3. Auflage - Fachhochschule Mannheim - Hochschule für Technik und Gestaltung [5] Nguyen, Phung Quang: Praxis der feldorientierten Drehstromantriebsregelungen / Ehningen bei Böblingen: expert-Verl., 1993 ISBN 3-8169-1047-5