Literatur Didaktik der Elementargeometrie
Werbung

Literatur Didaktik der Elementargeometrie
1.) Axiomatische Geometrie
Hilbert, D.
Grundlagen der Geometrie, 1899. Unzählige Auagen, Teubner Verlag.
Bachmann, F.
Aufbau der Geometrie aus dem Spiegelungsbegri, 1959. Berlin: Springer.
Greenberg, M.J.
Klotzek, B.
Euclidean and Non-Euclidean Geometries, 3. Au. 1993, New York: Freeman.
Euklidische und nichteuklidische Elementargeometrien, 2001, Verlag Harry Deutsch.
2.) Historische Darstellungen
Scriba, C.J. & Schreiber, P.
Gericke, H.
5000 Jahre Geometrie, 2000, Berlin: Springer.
Mathematik in Antike und Orient; Mathematik im Abendland,
1984 und 1990,
Wiesbaden: Fourier-Verlag.
Tropfke, J.
Geschichte der Elementar-Mathematik
4. Band: Ebene Geometrie, 3. Au. 1940,
Berlin: de Gruyter.
3.) Didaktik
Kratz, J.
Zentrale Themen des Geometrieunterrichts, 1993, München: bsv-Verlag.
Mitschka, A.
Didaktik der Geometrie in der Sekundarstufe I, 1982, Freiburg: Herder.
Weigand, H.-G. & Weth, Th.
Computer im Mathematikunterricht, Neue Wege zu alten Zielen,
2002, Spektrum-Verlag.
Maier, P.
Räumliches Vorstellungsvermögen, 1999, Donauwörth: Auer-Verlag.
Freudenthal, H.
Mathematik als pädagogische Aufgabe, 2 Bde., 1977 und 1979, Stuttgart: Klett.
Reiss, K. Wie viel Beweisen braucht man im Mathematikunterricht?
zur Didaktik der Mathematik, 2004.
Schupp, H.
Eichstätter Kolloquium
Elementargeometrie, Paderborn: Schöningh.
4.) Schulbücher
Barth, F., et al.,
Kratz, J.
Anschauliche Geometrie, Bde. 14, Ehrenwirth-Verlag.
Mathematik, Geometrie, 7.10. Klasse, bsv-Verlag.
5.) Links
http://www.madin.net (umfangreiche Materialien zum Geometrieunterricht)
http://vhb.org (Virtuelle Hochschule Bayern, insbes. Computer im MU (Weth), Schulgeometrie (Weigand, im Entstehen)
http://z-u-l.de (das dynamische Geometriesystem von René Grothmann)
http://geonext.de (die Bayreuther Konkurrenz)
1
Grundbegrie der ebenen Schulgeometrie
Quelle: Kratz, Zentrale Themen des Geometrieunterrichts, 1993, bsv
1.) Punkte, Geraden und davon abgeleitete Begrie:
Punkte und Geraden müssen als vorgegeben betrachtet werden. Allerdings wird man im U.
zweckmäÿigerweise von der bereits in der GS etablierten Zeichenpraxis ausgehen. Strenggenommen werden die geometrischen Grundobjekte nur durch ihre wechselseitigen Beziehungen
implizit festgelegt.
Z.B.: Durch 2 verschiedene Punkte A, B gibt es genau eine Gerade AB, 2 Geraden schneiden
sich in höchstens einem Punkt, etc.
Strecken: Für die Punkte jeder Geraden werden 2 totale und strenge Ordnungen links und
rechts als existent angenommen. [A; B] := {P ∈ AB|A links P links B oder A = P oder B =
P }. Entsprechend werden halboene und oene Strecken festgelegt. Halbgeraden: [AB[:= {P ∈
AB|P rechts A}.
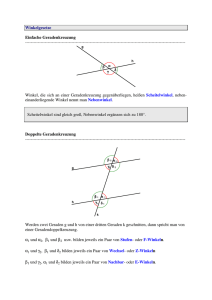
2.) Winkel:
Denitionsmöglichkeiten:
1.) Nicht orientierter Winkel: Vereinigung zweier Halbgeraden, die vom selben Punkt (Scheitel)
ausgehen.
2.) Orientierter Winkel: Paar zweier Halbgeraden, die vom selben Punkt ausgehen und die man
sich durch eine Drehung gegen den Uhrzeigersinn verbunden denkt.
3.) Schenkel zusammen mit Winkelfeld: Ein Paar von Halbgeraden, die von einem gemeinsamen
Punkt ausgehen, unterteilt die Ebene in zwei Mengen. Jede dieser beiden Mengen kann als Winkelfeld festgelegt werden. Damit wird über das Winkelfeld auch die Einführung nichtorientierter
überstumpfer Winkel möglich.
In der Unterrichtspraxis meist orientierter Winkel. Vorteile des orientierten Winkels:
Viele Beispiele aus dem täglichen Leben betreen Drehwinkel
Die Volldrehung entspricht einer natürlichen Maÿeinheit der Winkelmessung
Beim nichtorientierten Winkel gibt es zu wenig Dierenzierungsmöglichkeiten (spitz, stumpf,
. . . )
Bei Figuren gäbe es keinen Unterschied zwischen Auÿen- und Innenwinkeln
Bei der Betrachtung von Achsenspiegelungen sind orientierte Winkel von Vorteil
Die Winkelabtragung mit dem Zirkel geht aus der Vorstellung des Drehwinkels hervor.
Bemerkung: Es gäbe natürlich noch die Möglichkeit, die Winkeldenition des (orientierten)
Winkels so zu gestalten, daÿ das Winkelfeld dazugehört.
3.) Parallelen:
Es gibt im wesentlichen 3 Denitionsmöglichkeiten:
Denition nach Euklid: Zwei Geraden einer Ebene heiÿen parallel, wenn sie sich nicht schneiden.
Denition nach Poseidonos von Apameia (100 v. C.): Zwei Geraden heiÿen parallel, wenn alle
Punkte der einen Geraden von der anderen Geraden denselben Abstand haben.
Lot-Denition: Zwei Geraden einer Ebene heiÿen parallel, wenn sie ein gemeinsames Lot haben.
Diskussion: Die Lot-Denition hat gegenüber den beiden anderen den Vorteil:
1.) der direkten Nachprüfbarkeit
2
2.) der Verwendung auch als Zeichenanweisung
3.) der einfachen Begrisbildung. Allerdings hat die Lot-Denition gewisse systematische Nachteile im Rahmen einer streng wissenschaftlichen Geometrie.
4.) Axiome:
Die Geometrie ist rein mathematisch gesehen ein Gedankengebäude, das auf plausiblen, aber
nicht beweisbaren Annahmen (Hypothesen, Grundsätzen), den sogenannten Axiomen aufbaut.
Das berühmteste dieser Axiome ist wohl das Parallelenaxiom, welches je nach Parallelendenition allerdings anders ausfällt:
Fassung in der E-Denition: Durch einen Punkt auÿerhalb einer Geraden gibt es genau eine
Parallele (Nichtschneidende!) zu dieser Geraden.
Fassung bei Lot-Denition: Z-Winkel an Parallelen sind gleich.
5.) Winkelsumme im Dreieck:
Aus dem Parallelenaxiom läÿt sich der Satz über die Winkelsumme im Dreieck folgern (parallele
Hilfslinie durch Spitze, Z-Winkelbetrachtung). Mögliche Zugänge zu diesem wichtigen Satz sind:
Zeichnen willkürlicher Dreiecke und Ausmessen der Innenwinkel
Abreiÿen zweier Ecken und Anordnen beim dritten Eck zu einem insgesamt gestreckten Winkel
Falten eines Dreiecks entlang der Mittenparallelen
Umlaufen eines beliebigen Dreiecks entspricht einer Volldrehung.
3
Axiomatische Geometrie à la Hilbert (Grundlagen der Geometrie, 1899)
Anstatt von Punkten, Geraden und Ebenen können wir ebenso von Tischen, Stühlen
und Bierseideln sprechen.
Eine ebene Geometrie ist nach Hilbert ein System von Mengen
G
P
(Menge von Punkten) und
(Menge von Geraden), welches bestimmten Forderungen (Axiomen) genügt. Die Axiome
werden üblicherweise in die folgenden Gruppen eingeteilt:
1.) Axiome der Inzidenz:
Es gibt eine symmetrische Relation in (sprich inzidiert) zwischen
P
und
G
mit den folgenden
Eigenschaften:
A1 Zu jedem Punkt P
sodaÿ
P
in
g
und
Q
in
und jedem davon verschiedenen Punkt
Q
gibt es genau eine Gerade
g,
g
A2 Zu jeder Geraden gibt es mindestens zwei verschiedene Punkte, die mit ihr inzidieren.
A3 Es gibt mindestens 3 verschiedene Punkte, die nicht mit einer gemeinsamen Geraden inzidieren.
2.) Axiome der Lage:
∗ ∈ P × P × P mit den folgenden Eigenschaften:
B1 Falls A ∗ B ∗ C (sprich B zwischen A und C ), dann sind A, B, C verschieden, sie inzidieren
mit einer gemeinsamen Geraden, und es gilt auch C ∗ B ∗ A
Es gibt eine dreistellige Relation
. . . weitere Axiome der Lage . . .
Mit Hilfe der Relation
∗
können die Begrie Inneres und Äuÿeres einer Figur festgelegt
werden, und es kann auch eine Ordnung auf der Menge der mit einer Geraden inzidierenden
Punkte gefunden werden.
Besonders prominent unter den Axiomen der Lage ist das auf Pasch zurückgehende, welches
anschaulich so lautet: Wenn eine Gerade in das Innere eines Dreiecks hineingeht, dann geht
sie auch wieder heraus.
Aufgrund der Axiome der Lage lassen sich Strecken ([AB]
:= {P ∈ P|A ∗ P ∗ B} ∪ {A, B}) und
Halbgeraden und somit auch Winkel als Paare von Halbgeraden mit gemeinsamem Ausgangspunkt denieren.
3.) Axiome der Kongruenz:
Auf der Menge aller Strecken und auf der Menge aller Winkel wird jeweils eine Relation ∼
=
festgelegt, welche bestimmte Eigenschaften hat (die unter anderem darauf hinauslaufen, daÿ
∼
=
eine Äquivalenzrelation ist). Zwei Dreiecke werden alsdann als kongruent bezeichnet, wenn
ihre Seiten und ihre Winkel paarweise kongruent sind. Das berühmteste Kongruenzaxiom ist
dann:
SWS Falls zwei Seiten und der eingeschlossene Winkel eines Dreiecks jeweils zu zwei Seiten und
dem eingeschlossenen Winkel eines anderen Dreiecks kongruent sind, dann sind beide Dreiecke
kongruent.
4.) Axiom der Stetigkeit:
4
Hier sind verschiedene, zueinander äquivalente Versionen im Gebrauch. Besonders windschnittig ist:
g
Angenommen, die Menge der mit einer Geraden
zweier disjunkter, nichtleerer Mengen
Σ1
und
Σ2 ,
inzidierenden Punkte ist die Vereinigung
sodaÿ kein Punkt der einen Menge zwischen
zwei Punkten der anderen Menge liegt. Dann gibt es genau einen mit
sodaÿ
Σ1
oder
Σ2
eine von
O
g
inzidierenden Punkt
O,
ausgehende Halbgerade und die andere Menge deren Komplement
ist.
Mit Hilfe des Stetigkeitsaxioms läÿt sich beispielsweise die Existenz einer bijektiven, ordnungstreuen Abbildung zwischen der Menge aller mit einer Geraden inzidierenden Punkte und der
Menge der reellen Zahlen beweisen.
Eine Geometrie, welche die Axiomgruppen 1.) bis 4.) erfüllt, nennt man absolute oder neutrale Geometrie. Die Trennung zwischen der Euklidischen und der hyperbolischen Geometrie
erfolgt je nachdem, ob das Euklidische (EPA) oder das hyperbolische Parallelenaxiom (HPA)
Gültigkeit beansprucht.
5.) Parallelenaxiom:
EPA Zu jeder Geraden g und zu jedem mit g nicht inzidierenden Punkt P
Gerade
h,
welche mit
P
inzidiert und
HPA Es gibt eine Gerade g
zwei verschiedene Geraden
g
und einen mit
h1
und
h2
gibt es genau eine
nicht schneidet.
g
nicht inzidierenden Punkt, sodaÿ es mindestens
gibt, die mit
P
inzidieren und
g
nicht schneiden.
Forderungen an ein Axiomensystem
Die geläugsten Forderungen sind die nach Unabhängigkeit, nach Widerspruchsfreiheit und
nach Eindeutigkeit bis auf Isometrie (= Kategorizität).
Unter Unabhängigkeit eines Axioms A zu den anderen Axiomen versteht man, daÿ es ein
System aus Mengen
P
und
G
und Relationen in,
∗
und
∼
=
(ein sogenanntes Modell) gibt, in
denen A nicht gilt, die restlichen Axiome aber schon.
Unter der Widerspruchsfreiheit eines Axiomensystems versteht man, daÿ es ein Modell gibt,
welches die Axiome erfüllt.
Im Falle der Euklidischen Geometrie besteht ein mögliches Modell aus
{{(x, y) ∈ R2 |ax + by = c}|a, b, c ∈ R; a oder b 6= 0}.
P = R2
und
G =
Im Falle der hyperbolischen Geometrie ist das Poincarésche Kreismodell besonders beliebt.
Somit wird die Widerspruchsfreiheit der Euklidischen Geometrie auf die Widerspruchsfreiheit
der Axiome über die reellen Zahlen und die Widerspruchsfreiheit der hyperbolischen Geometrie
auf die Widerspruchsfreiheit der Euklidischen Geometrie zurückgeführt.
Sowohl zwischen Modellen der Euklidischen wie denen der hyperbolischen Geometrie besteht
Eindeutigkeit bis auf Isometrie. (Das läÿt sich relativ einfach durch Einführung von Koordinatensystemen zeigen.)
5
Kongruenzbeweise
Mit Hilfe der Kongruenzsätze für Dreiecke lassen sich Beweise von solchen geometrischen Aussagen führen, in denen (zumindest implizit) die Gleichheit von Längen bzw. Winkeln behauptet
wird. Kongruenzbeweise bieten eine relativ einfache Möglichkeit, im Rahmen eines bestimmten
formalen Musters das Prinzip der strengen logischen Deduktion kennenzulernen.
Voraussetzungen für die Durchführung von Kongruenzbeweisen sind:
Erkenntnis, daÿ die Geometrie eine streng logisch deduzierende Wissenschaft ist
Als Begründung hierfür werden üblicherweise den Schülern Bilder präsentiert, die zu optischen
Täuschungen Anlaÿ geben, oder es wird ihnen gesagt, daÿ jede Zeichnung nur für eine spezielle
Situation steht und auÿerdem Ungenauigkeiten aufweist. Mindestens ebenso wichtig ist es aber
auch, den Kindern zu vermitteln, daÿ die Geometrie eine Art Gedankenspiel ist, in dem aus
gewissen Annahmen und nach gewissen Regeln in präziser und allgemeingültiger Weise Schluÿfolgerungen gezogen werden sollen, und daÿ ein solches Vorgehen in vielen Lebensbereichen
üblich ist (z.B. in der Rechtsprechung).
Fähigkeit, Voraussetzungen und Behauptungen aus Texten zu erschlieÿen und (anhand einer Überlegungsgur) klar zu formulieren
Beispiel: In einem gleichschenkligen Dreieck sind die Höhen von den Eckpunkten der Basis auf
die beiden anderen Seiten gleich lang. Voraussetzung? Behauptung? Zwischenüberlegung: Die
betrachtete Aussage in Wenn-Dann-Form formulieren.
Erkenntnis, daÿ man zwischen Satz und Kehrsatz unterscheiden muÿ
Das berühmte Beispiel: Wenn es regnet, ist die Straÿe naÿ.
Erkenntnis, daÿ man die Behauptung nicht für den Beweis heranziehen darf
Geläuge Kenntnis der Kongruenzsätze und Fähigkeit, diese zur Beurteilung von
Dreieckskongruenz anzuwenden
Dazu gehört insbesondere auch die Fähigkeit, die mutmaÿlich kongruenten Teildreiecke in einer
Beweisgur zu nden.
Kenntnis wichtiger Sätze und Fähigkeit, diese aufgrund der Voraussetzungen anzuwenden
Beispiel: Zum Beweis der obigen Aussage über gleichschenklige Dreiecke ist es nötig, den Satz
über die gleichen Basiswinkel im gleichschenkligen Dreieck heranzuziehen.
Fähigkeit, aus dem Vorkommen von Begrien bestimmte Voraussetzungen zu formulieren
Beispiel: Der Begri Höhe ist mit dem Vorkommen rechter Winkel, der Begri Winkelhalbierende mit der Existenz von kongruenten benachbarten Winkeln verbunden.
Beispiele
1.) In einem gleichschenkligen Dreieck sind die Höhen von den Eckpunkten der Basis auf die
beiden anderen Seiten gleich lang.
6
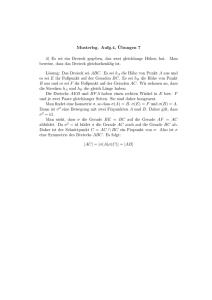
Die Überlegungsgur:
AC = BC , ^F = ^G = 90◦ .
Beh: AF = BG.
Beweis: Zu zeigen: ∆ABG ∼
= ∆ABF
1.) α = β (Basiswinkel im gleichschenkligen
2.) [AB] gemeinsam
3.) ^G = ^F (Vor.)
Vor:
WWS
⇒
Dreieck, Vor.)
Beh.
2.) Als Übung: Gegeben sei ein beliebiges Dreieck
Dreiecke
ACS
und
BCT
ABC . Auf [AC] und [BC] werden gleichseitige
AT = BS .
aufgesetzt. Beweise, daÿ
Symmetrieen
Als ein groÿer Vorteil des abbildungsgeometrischen Zugangs gilt, daÿ aufgrund erkannter Symmetrieen von Figuren sofort auf Längen- und Winkeleigenschaften dieser Figuren geschlossen
werden kann, ohne daÿ dazu komplizierte Kongruenzbetrachtungen nötig sind.
Denition: Eine Figur (= Punktmenge) heiÿt symmetrisch, wenn es eine nichttriviale Kongruenzabbildung (eine sogenannte Deckabbildung der Figur) gibt, welche die Figur in sich selbst
überführt.
Entsprechend den möglichen Deckabbildungen gibt es Achsensymmetrie, Drehsymmetrien (Spezialfall Punktsymmetrie), Schubsymmetrie und Symmetrie bezügl. der Schubspiegelung. Die
beiden letzteren Symmetriearten können nur bei unbegrenzten Figuren vorkommen. Für die
Schule ausschlieÿlich relevant sind Achsen- und Punktsymmetrie.
Weil aber im Examen für RS auch schon allgemeine Drehsymmetrie drangekommen ist, hier
eine typische, rein drehsymmetrische Figur:
7
Eine übliche Schülerschwierigkeit ist, den Unterschied zwischen Symmetrie (Eigenschaft einer
Figur) und Kongruenz (Relation zwischen Figuren) klar wahrzunehmen.
Hat man die Symmetrie einer Figur erkannt, so ist es tatsächlich leicht, daraus auf Eigenschaften
der Figur zu schlieÿen. Beim Parallelogramm folgt beispielsweise aus der Punktsymmetrie, daÿ
sich die beiden Diagonalen gegenseitig halbieren, daÿ gegenüberliegende Seiten gleich lang,
gegenüberliegende Innenwinkel gleich groÿ sind. Aber Vorsicht: Im Sinne eines strengen Beweises
ist es in der Regel mit für die Schüler schwer zu vermittelnden Eindeutigkeitsbetrachtungen
verbunden, wenn man im Rahmen der Abbildungsgeometrie beweisen will, daÿ eine bestimmte
Figur eine bestimmte Symmetrie aufweist.
Beispiel: Wir wollen beweisen, daÿ ein Parallelogramm (also ein Viereck
AD k BC )
mit
AB k CD,
[AC]. Dann ist C der Bildpunkt von A bei Punktspiegelung an M und umgekehrt. Aber ist auch D der Bildpunkt von B bei Punktspiegelung an M ?
0
Angenommen B ist der Bildpunkt von B bei Punktspiegelung an M . Dann muÿ (wegen der
Sei
M
ABCD
punktsymmetrisch ist:
der Mittelpunkt der Diagonalen
Eigenschaft der Punktspiegelung, daÿ Geraden stets auf dazu parallele Geraden abgebildet wer0
0
den) AB parallel zu CB sein (C ist ja der Bildpunkt von A). Ebenso muÿ auch sein: AB k BC .
0
0
Wegen der Eindeutigkeit der Parallelen muÿ nun gelten: B C = DC und AB = AD , folglich
0
0
0
ist auch {B } = B C ∩ AB = DC ∩ AD = {D}.
Zusammenfassung der Kongruenzgeometrie
Figurengeometrische Betrachtungsweise:
Figuren und ihre Eigenschaften sowie zugehörige Konstruktionsaufgaben stehen im Vordergrund. Kongruenz von Vielecken über gleiche Winkel bzw. Seitenlängen. Kongruenzsätze auf-
8
grund des Prinzips der eindeutigen Konstruktion. Begründung von Figureneigenschaften und
Konstruktionsverfahren aufgrund von kongruenten Teildreiecken.
Wissenschaftliches Vorbild: Euklid/Hilbert
Abbildungsgeometrische Betrachtungsweise:
Kongruenzabbildungen im Sinne von Mehrfachspiegelungen werden genau untersucht. Figuren
kommen dann als Invarianten dieser Mehrfachspiegelungen ins Spiel. Eigenschaften von Figuren ergeben sich als Konsequenz von Eigenschaften der zugehörigen Deckabbildungen (Symmetriebetrachtungen). Die meisten Grundkonstruktionen mit Zirkel und Lineal ergeben sich
aus Eigenschaften der Achsenspiegelung. Die Kongruenzsätze für Dreiecke lassen sich aufgrund
der Eigenschaften von Kongruenzabbildungen beweisen und dienen dann als ein zusätzliches
(nicht zentrales) Handwerkszeug.
Wissenschaftliches Vorbild: Erlanger Programm von Felix Klein/ Bachmann.
In der Schulpraxis versucht man meist einen Kompromiÿ zwischen beiden Betrachtungsweisen
zu nden, wobei man am Gymnasium mehr der gurengeometrischen, an der Realschule mehr
der abbildungsgeometrischen Seite zuneigt.
9
Überblick über Ähnlichkeitsabbildungen
1. Denition:
Eine Ähnlichkeitsabbildung ist eine Verkettung von Kongruenzabbildungen und zentrischen
Sreckungen.
2. Denition:
Eine Klapp- (Spiegel-) Streckung ist die Verkettung einer Achsenspiegelung und einer zentrischen Streckung, wobei das Zentrum auf der Spiegelachse liegt.
3. Denition:
Eine Drehstreckung ist die Verkettung einer Drehung und einer zentrischen Streckung, wobei
das Zentrum und der Drehpunkt zusammenfallen.
Satz 1:
m1 , m2 ist wieder eine zentrische Streckung mit Streckfaktor m1 · m2 , falls m1 m2 =
6 1. Im Falle m1 m2 = 1 und verschiedener
Die Verkettung zweier zentrischer Streckungen mit Streckfaktoren
Streckzentren ist die Verkettung eine Verschiebung.
Satz 2:
Eine Ähnlichkeitsabbildung ist durch die Lage dreier verschiedener Urpunkte und der zugehörigen Bildpunkte eindeutig bestimmt.
Satz 3:
Eine Ähnlichkeitsabbildung ist entweder eine Verschiebung, eine Schubspiegelung, eine Klappstreckung oder eine Drehstreckung.
Überblick über Drehungen
Satz: (a) Die Verkettung zweier Drehungen (M ; ϕ1 ) und (M ; ϕ2 ) mit demselben Drehzentrum
M
ist eine Drehung um das Zentrum
M
mit dem Drehwinkel
ϕ1 + ϕ2 .
(b) Die Verkettung zweier Drehungen (M1 ; ϕ1 ) und (M2 ; ϕ2 ) mit verschiedenen Drehzentren ist
◦
eine Drehung mit dem Drehwinkel ϕ1 + ϕ2 , falls ϕ1 + ϕ2 6= 360 ; andernfalls ist die Verkettung
eine Verschiebung.
10
Cosinussatz und eindeutige Konstruktion
Zu den Bezeichnungen: a, b, c bzw. α, β, γ beziehen sich auf die Standardbezeichnungen für
Seiten und Winkel in Dreiecken.
Vorausgesetzt sei eines der üblichen Axiomensysteme der Euklidischen Geometrie.
Cosinussatz: In jedem Dreieck ist das Quadrat einer Seite gleich der Summe der Quadrate der
beiden anderen Seiten abzüglich des Produkts aus diesen beiden Seiten und des Cosinus des
eingeschlossenen Winkels.
a, b > 0 Streckenlängen und β ∈]0; 180◦ [.
(a, b, β) heiÿe konstruierbar, wenn es ein Dreieck
Denition: Seien
(i) Das Tripel
(ii)
(a, b, β)
mit diesen Stücken gibt.
heiÿe eindeutig konstruierbar, wenn dieses Tripel konstruierbar ist und wenn alle
Dreiecke mit diesen Stücken zueinander kongruent sind.
Hilfssatz: Es seien zwei Dreiecke nicht kongruent. Dann stimmen sie in mindestens einer Seite
nicht überein. (Begründung: Wenn sie in allen 3 Seiten übereinstimmen würden, dann wären
sie gem. SSS kongruent.)
(a, b, β) ist genau dann eindeutig konstruierbar, wenn die Gleichung b2 = a2 +c2 −2ac cos β
genau eine positive Lösung für c hat.
2
2
2
Beweis: Sei (a, b, β) eindeutig konstruierbar. Dann gibt es c > 0 mit b = a + c − 2ac cos β .
0
2
2
02
0
0
Sei nun auch c > 0 mit b = a + c − 2ac cos β . Dann ist (a, c , β) eindeutig konstruierbar und
b ist die dritte Seite in diesem Dreieck. Da (a, b, β) eindeutig konstruierbar ist, folgt c0 = c.
Satz:
b2 = a2 + c2 − 2ac cos β genau eine positive Lösung für c bei vorgegebenem (a, b, β).
Dann ist (c, a, β) konstruierbar, und mithin auch (a, b, β). Nehmen wir an, daÿ (a, b, β) nicht
0
0
eindeutig konstruierbar ist. Wegen des Hilfssatzes existiert dann ein c > 0, c 6= c, sodaÿ c Seite
0 0 0
2
2
02
0
in einem Dreieck A B C mit (a, b, β) ist. Dann gilt aber auch b = a + c − 2ac cos β , woraus
Habe nun
sich sofort ein Widerspruch zur Eindeutigkeit der Lösung ergibt.
11
Der Konstruktionsfall SsW und der Cosinussatz
Vorgegeben seien von einem Dreieck die Seiten
a>0
b>0
und
β ∈]0; 180◦ [.
wenn b ≥ a.
und der Winkel
Bekanntlich läÿt sich das Dreieck dann und nur dann eindeutig konstruieren,
Man kann diese Tatsache auch mit Hilfe des Cosinussatzes beweisen:
Zur Klärung der Grundsituation: Der Cosinussatz stellt einen Zusammenhang zwischen positiven (!) Längen und Winkeln zwischen 0 und 180 Grad dar.
Das nichtentartete (!) Dreieck ABC ist aus a, b, β eindeutig konstruierbar, genau dann, wenn
+
die über R (!) eindeutige Lösung der Gleichung
b2 = a2 + c2 − 2ac cos β
ist. Die Lösung der Gleichung über
c1/2
C
bzw.
c
c2 − (2a cos β)c + (a2 − b2 ) = 0
ist:
q
= a cos β ± b2 − a2 sin2 β.
1.) Damit die Gleichung mindestens eine positive Lösung hat, ist notwendig und hinreichend,
daÿ die Diskriminante nichtnegativ ist, also
b2 − a2 sin2 β ≥ 0 ⇔ b ≥ a sin β.
Geometrische Interpretation:
β
Schenkel von
b
muÿ mindestens gleich dem Abstand
sein, damit der Kreis um
C
mit Radius
b
h
von
C
zum freien
mindestens einen Schnittpunkt mit
diesem Schenkel hat.
2.) Damit die Gleichung genau eine positive Lösung besitzt, ist notwendig und hinreichend, daÿ
die Bedingung für 1.) gilt, und daÿ
a cos β ≤
q
b2 − a2 sin2 β ⇔ a2 cos2 β ≤ b2 − a2 sin2 β ⇔ a2 ≤ b2 ⇔ a ≤ b.
Da die Bedingung für 1.) schwächer ist als die Bedingung
Das Dreieck
ABC
ist aus
a, b, β
a≤b
folgt insgesamt:
eindeutig konstruierbar, genau dann, wenn
beweisen war.
12
b ≥ a,
was zu
Ane Abbildungen und Trigonometrie
Denition Eine Abbildung des R2 in sich heiÿt ane Abbildung, wenn sie bijektiv und geradentreu ist.
Bemerkung f : M → N
sei injektiv und
A, B ⊂ M .
Dann ist
f (A ∩ B) = f (A) ∩ f (B).
Hauptsatz
detA
6= 0
f : R2 → R2 eine ane Abbildung. Dann
a ∈ R2 , sodaÿ f (x) = a + Ax für alle x ∈ R2 .
Sei
und
gibt es eine Matrix
A ∈ R2,2
mit
Beweisskizze:
Da
f
bijektiv und geradentreu ist, gilt aufgrund obiger Bemerkung für zwei Geraden
0
0
sowie ihre Bildgeraden g und h :
g
und
h
g ∩ h = ∅ ⇔ g 0 ∩ h0 = ∅.
f
ist somit auch parallelentreu. Es folgt, daÿ
f
auch mittelpunktstreu ist, denn der Mittelpunkt
einer Strecke läÿt sich als Diagonalenschnittpunkt eines geeigneten Parallelogramms auassen
und Parallelogramme gehen bei
f
ja wieder in Parallelogramme über. Da sich jeder beliebige
Teilpunkt einer Strecke durch fortgesetzte Halbierungen beliebig genau approximieren läÿt,
folgt für
f
sogar die allgemeine Verhältnistreue.
Aus der Geraden-, Parallelen- und der Verhältnistreue von
T
T
(e1 = (1, 0); e2 = (0, 1)):
f
ergibt sich für
R2 3 x = x1 e1 +x2 e2
f (x) = f (0) + x1 f (e1 ) + x2 f (e2 ).
Mit
a := f (0)
und mit
Aij
f (ej ) = A1j e1 + A2j e2 folgt die Behauptung, wenn
Bijektivität von f die Determinante von A ungleich
festgelegt durch
man noch berücksichtigt, daÿ wegen der
Null sein muÿ.
13
Schulrelevante ane Abbildungen
Kongruenzabbildungen (Achsenspiegelung, Drehung, Verschiebung)
Ähnlichkeitsabbildungen (insbes. zentrische Streckung)
Orthogonale Anität
Scherung
Hinweis: Die Matrixschreibweise wird zwar in der RS eingeführt, aber nicht in essentieller Weise
(z.B. bei der Verkettung von Abbildungen) angewandt.
14
Typische Aufgabenstellungen
1.) Ermittlung der Abbildungsgleichungen als Anwendung der Trigonometrie
2.) Ermittlung der Koordinaten von Urpunkten und Bildpunkten
3.) Ermittlung der Gleichung von Bildgeraden und Bildparabeln
4.) Berechnung von Fixpunkten
5.) Bestätigung von Fixgeraden
6.) Zu-Fuÿ-Berechnung der Matrixdarstellung von Verkettungen aner Abbildungen
7.) Ermittlung von Trägergeraden
Z.B.: Der Koordinatenursprung ist der gemeinsame Eckpunkt
[BC]. Die Eckpunkte B liegen
45◦ . Ermittle die Gleichung der
g
A
auf der Geraden
Maÿ
Trägergeraden der Eckpunkte
8.) Einbeschreibungsaufgaben
Z.B.: Gegeben ist die Parabel
y = x2 ,
welcher der Pfeil
mit der Gleichung
15
y = 12 x + 6.
Die
C.
−−→
AB = (3, 6)T
9.) Abbildung allgemeinerer Funktionsgraphen
ABC mit der
∠BAC haben das
von gleichschenkligen Dreiecken
Basis
einbeschrieben ist. Bestimme
A
und
B.
Aufgaben zur Koordinatendarstellung von anen Abbildungen
1.) Bestätigen Sie die Abbildungsgleichung der Achsenspiegelung an einer Gerade durch den
Nullpunkt, die mit der
x-Achse
den Winkel
P durch
(a; 2ϕ − α) dar
die Polarkoordinaten
2.) Die Gerade
g
punkt
Z(4| − 1)
0
von p .
einschlieÿt. Hinweis: Stellen Sie zuerst den Ur0
und den Bildpunkt P durch die Polarkoordinaten
und gehen Sie dann zu Cartesischen Koordinaten über.
p
y = 2x − 4 wird durch eine Drehung um den Koordinaα = 45◦ auf die Gerade g 0 abgebildet. Ermittle die Gleichung
mit der Gleichung
tenursprung und dem Drehwinkel
0
von g .
3.) Die Parabel
(a; α)
ϕ
mit der Gleichung
und Streckfaktor
k = 0, 25
y = − 41 x2 − x + 2
wird durch zentrische Streckung mit
0
auf die Bildparabel p abgebildet. Ermittle die Gleichung
4.) Gegeben ist eine Abbildung mit der Gleichung
x0
y0
=
2 0
0 2
x
y
+
−3
−1
Bestimmen Sie die Gleichung derjenigen Fixgeraden, die durch den Punkt (0|7) verläuft.
5.) Bestimmen Sie die Matrix der Hintereinanderausführung der folgenden Abbildungen
(1) Orthogonale Anität mit der
x-Achse als Anitätsachse und dem Anitätsfaktor k = 0, 5.
(2) Achsenspiegelung an der x-Achse.
6.) Gegeben ist die Parabel
A
und
−→
y = x2 , welcher der Pfeil AB = (3; 6)T
B.
16
einbeschrieben ist. Bestimme
Flächen- und Rauminhalte
Der Begri des Flächen- bzw. Rauminhalts kann in zwei Schritten eingeführt werden.
1.) Inhalt von Polygonen (Polyedern)
Man fordert von der Inhaltsfunktion
µ(P )
der Pol.
µ(P ) ≥ 0
P in die beiden Teilpol. P1 bzw. P2
III.) Falls P1 ∼
= P2 , dann µ(P1 ) = µ(P2 )
P
die folgenden Eigenschaften (Axiome):
I.)
II.) Wenn
IV.) Für ein bestimmtes Quadrat (Hexaeder)
zerlegt ist, dann gilt
Q
ist
Hauptsatz: Bei vorgegebenem Quadrat (Hexaeder)
bzw. Rauminhaltsfunktion)
µ
µ(P ) = µ(P1 ) + µ(P2 )
µ(Q) = 1.
Q
gibt es genau eine Funktion (Flächen-
mit den obigen Eigenschaften.
Mit dem Beweis des Hauptsatzes erhält man automatisch die Flächen- bzw. Volumenformeln
für Rechtecke bzw. Quadrate.
2.) Inhalt beliebiger Flächenformen bzw. Körper
Sei
M
eine Punktmenge in der Ebene oder im Raum. Dann heiÿt
Folgen von Pol.
(Pk )
und
(P k )
M
Jordan-meÿbar, wenn es
gibt mit
Pk ⊂ Pk+1 ⊂ M,
P k+1 ⊃ P k ⊃ M, µ(P k ) − µ(Pk ) → 0.
[µ(Pk ), µ(P k )] eindeutig bestimmte Zahl µ(M ) ist dann von
unabhängig und heiÿt Jordanmaÿ der Menge M .
Die durch die Intervallschachtelung
der speziellen Wahl der Pol.
Denition: Kompakte, Jordan-meÿbare Mengen mit einem positiven Maÿ in der Ebene werden
als Flächenformen, solche im Raum als Körper bezeichnet.
Bemerkung: Eine Menge
M
ist genau dann Jordan-meÿbar, wenn das Riemann-Integral
R
M
dx
existiert. Der Wert von letzterem ist dann mit dem Jordan-Maÿ identisch.
zerlegungsgleichergänzungsgleich
Für die Bestimmung von Flächen- und Rauminhalten sind die folgenden Begrie wichtig:
Zwei Flächenformen (Körperformen) heiÿen
zerlegungsgleich, wenn man sie in endlich viele,
paarweise kongruente Teilächen (Teilkörper) zerlegen kann.
Zwei Flächenformen (Körper) heiÿen
ergänzungsgleich, wenn sie sich durch Hinzufügung je
endlich vieler, paarweise kongruenter Flächenformen (Körper) zu zerlegungsgleichen Flächenformen (Körper) ergänzen lassen.
Wichtig: Zerlegungsgleichheit
⇔ Ergänzungsgleichheit ⇒ Inhaltsgleichheit, aber im allgemeinen
kann aus der Inhaltsgleichheit nicht auf die Ergänzungs- bzw. Zerlegungsgleichheit geschlossen
werden.
17
Zusammenhang zwischen Umfang und Fläche des Einheitskreises
n-Ecks
gelm.
gilt:
sn =
Die Fläche
n-Eck
fn
p
4 − c2n .
jedes der Teildreiecke, die dieses
bilden ist:
1
fn = sn cn .
4
Die Seitenlänge
gelm.
n-Ecks
ist:
tn des
tn =
umbeschriebenen re2sn
(Strahlensatz mit
cn
fn
jedes der Teildreiecke, die dieses umbeschrieKreismittelpunkt als Zentrum). Die Fläche
bene
Für die Seitenlänge
Seien
bzw.
n-Eck
sn des einbeschriebenen re-
bilden ist:
fn =
tn
.
2
un bzw. un die Umfänge des einbeschriebenen bzw. umbeschriebenen n-Ecks sowie Fn
F n die Flächeninhalte des einbeschriebenen bzw. umbeschriebenen n-Ecks, so ergibt sich:
un − un = ntn − nsn = nsn (
2
2
2
− 1) = un ( − 1) ≤ 8( − 1).
cn
cn
cn
cn → 2 für sn → 0 (bzw. für n → ∞) folgt, daÿ un − un → 0 für n → ∞. Da die Seitenlänn-Ecke auf jeden Fall gröÿer sind als die Seitenlängen jedes
beliebigen einbeschriebenen n-Ecks, muÿ die durch die Intervallschachtelung [un , un ] dargestellWeil
gen der umbeschriebenen regelm.
te reelle Zahl gleich dem Supremum aller Umfänge der Vielecke sein, die dem Einheitskreis
einbeschrieben sind und diesen interpolieren. Damit ist die durch die Intervallschachtelung bestimmte Zahl gleich dem Umfang des Einheitskreises, dessen Hälfte wir mit
π
(wie Πeripherie
des Halbkreises) bezeichnen. Für die Flächen ergibt sich:
F n − Fn =
=
Mithin bildet
[Fn , F n ]
F
einen Flächeninhalt
ntn nsn cn
n 2sn sn cn
−
= (
−
)=
2
4
2 cn
2
nsn 2
cn
un 2
cn
( − )=
( − ) → 0 (n → ∞).
2 cn
2
2 cn
2
eine Intervallschachtelung, welche gewährleistet, daÿ der Einheitskreis
F n = u2n und Fn = u2n c2n , also
besitzt. Nun ist aber
Fn =
un
un
>π>
> Fn .
2
2
Insgesamt ergibt sich, daÿ
π ∈ [Fn ; F n ]
und damit
π = F.
18
Trigonometrie, Zusammenfassung
Die Trigonometrie ist derjenige Teil der Geometrie, welcher die wohl meisten Varianten in den
verschiedenen Zugängen besitzt.
1.) Einführung der trigonometrischen Funktionen
(a) Am rechtwinkligen Dreieck (für Winkel bis
◦
Cosinussatz für Winkel bis 180 )
90◦ ,
u.U. bei Einbeziehung von Sinus- und
(b) Am Einheitskreis
Empfehlung: Zuerst (a), dann (b)
2.) Sinussatz über Flächenformel
3.) Cosinussatz: Zu Fuÿ oder mit Hilfe des Skalarproduktes
4.) Additionstheoreme: Zu Fuÿ, mit Skalarprodukt, über Flächenformel
5.) Anwendungen von Sinus- und Cosinussatz: Vermessungsprobleme, Konstruktionsfälle
6.) Skalarprodukt, Einführung:
→
−
−
→
a ◦ b = a1 b 1 + a2 b 2
→
−
→
−
a ◦ b := |a||b| cos ϕ
(A) Kriterium für rechten Winkel zwischen Vektoren
(Ph) Berechnung der physikalischen Arbeit,
7.) Skalarprodukt, Eigenschaften:
(A): Algebraische Eigenschaften sofort nachzurechnen, Eigenschaft (Ph) folgt aus dem Cosinussatz (oder einem Additionstheorem)
(Ph): Distributivgesetz sehr mühsam (zu Fuÿ), Rest, insbes. Eigenschaft (A) rel. einfach.
8.) Anwendungen des Skalarproduktes bei Beweisen:
(A)
⇒
Additionstheoreme bzw. Cosinussatz (je nachdem, welche Aussage für Begründung von
(Ph) verwendet wurde)
(Ph)
⇒
Cosinussatz, Additionstheoreme
Beweise elementargeometrischer Eigenschaften, z.B. gemeinsamer Höhenschnittpunkt, Satz des
Thales, Rauteneigenschaften.
9.) Trigonometrische Funktionen:
Bogenmaÿ, Entwicklung aus dem Einheitskreis
10.) Goniometrische Gleichungen:
Beziehungen zwischen Sinus, Cosinus, Tangens; Rückführung auf algebraische Gleichungen
durch Substitution; Additions-/Doppelwinkelbeziehungen
19