Anwendungsschaltungen mit OPV
Werbung

Kapitel 9
Anwendungsschaltungen mit
Operationsverstärkern
Die hier betrachteten Schaltungen mit OP lassen sich unterteilen in solche mit einer
relativ geringen Ansteuerung und andere, die den OP voll aussteuern. Für die ersten
kann der OP gut durch den idealen OP beschrieben werden, d.h. die Eingangsströme, die
Differenzeingangsspannung und der Ausgangswiderstand sind verschwindend klein. Bei
voller Aussteuerung sind diese Annahmen nicht mehr voll gültig.
2KAPITEL 9. ANWENDUNGSSCHALTUNGEN MIT OPERATIONSVERSTÄRKERN
9.1
Analog-Rechenschaltungen
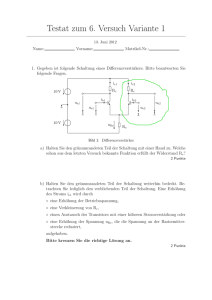
Setzt man in Bild 9.1 a die Knotenregel zur Berechnung des verschwindend kleinen Eingangsstromes ie an, dann erhält man unter Beachtung von ue = 0;
ua
u2
u3
R−
R−
R−
u1
+
+
=
0
−
u
=
u
+
u
+
u
(9.1)
+
a
1
2
3
R − R1 R2 R3
R1
R2
R3
Die Schaltung wird wegen des Minuszeichens Umkehraddierer genannt. Sie addiert die
Eingangsspannungen un mit unterschiedlichen Gewichtsfaktoren R− /Rn . Will man gleiche
Gewichtungen, dann werden alle Widerstände Rn gleich groß. Da ue = 0 gilt, sehen alle
Spannungsquellen un als Last genau die Widerstandswerte Rn .
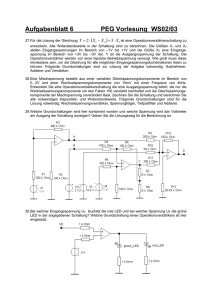
Abbildung 9.1: Analogrechenschaltungen a)Umkehraddierer b)Subtrahierer
Bei der Schaltung 9.1 b) ergibt sich für die Spannung am nicht invertierenden Eingang:
u+ = u +
1
R+
R1+ + R+
Am invertierenden Eingang werden zwei Spannungen, nämlich u−
1 und ua über Spannungsteiler wirksam:
u− =
u−
1
R−
R1−
+ ua −
R1− + R−
R1 + R −
−
Da nun ue = 0 sein muss, gilt u+ = u− . Dies ergibt den Zusammenhang zwischen u+
1 , u1
und ua :
u+
u−
u−
R1−
1
1
a
−
=
R1+ /R+ + 1 R1− /R− + 1
R1− /R− + 1 R−
Gleiche Gewichtung der beiden Eingangsspannungen erreicht man mit:
u+ =
−
R1+ /R+ = R1− /R− = α → u+
1 − u1 = α · u a
(9.2)
Die Schaltung 9.1 b wird deshalb Subtrahierschaltung genannt. Da die beiden Spannungen
u+ und u− nun nicht mehr einzeln zu null werden, liegt eine nennenswerte Gleichtaktansteuerung des OP vor. Mangelnde Gleichtaktunterdrückung wird also zu einem Fehler bei
der Differenzbildung führen.
9.1. ANALOG-RECHENSCHALTUNGEN
3
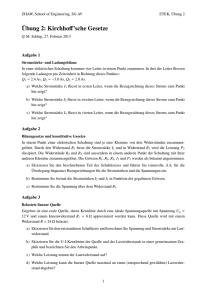
Abbildung 9.2: Analogrechenschaltungen: Integrator
Ersetzt man beim normalen Umkehrverstärker den Gegenkopplungswiderstand durch
einen Kondensator, dann erhält man eine Schaltung nach 9.2. Die Knotenbedingung bei
ue = 0 ergibt:
iR = u1 /R = −iC = −Cdua /dt
(9.3)
Durch Integration nach der Zeit:
1 Zt
u1 dt + U0
(9.4)
ua = −
RC 0
Man nennt RC = τ die Integrationszeitkonstante. Die Schaltung selbst heißt Integrator,
da ihr Zeitverhalten durch eine Integration nach der Zeit gegeben ist. U0 ist einerseits
mathematisch die Integrationskonstante, elektrisch aber nichts anderes als die Spannung,
die zum Beginn der Zeitzählung am Ausgang (und damit am Kondensator) lag.
Die gegengekoppelte Verstärkung ergibt nach Gl. OPR 1
V0 =
Z2
1
1
=−
=−
Z1
jωCR
jωτ
(9.5)
denselben Ausdruck wie ein normaler RC-Tiefpass oberhalb der Knickfrequenz (siehe OP
2.2).
Das bedeutet, dass auch dieser sich verhält wie ein Integrator. Global kann allen Netzwerken mit einem Verhalten nach Gl. 9.5 Integrationswirkung zugesprochen werden, während
Hochpässe entsprechend eine differenzierende Wirkung besitzen.
Beim Integrierer wirkt sich bereits ein geringer Eingangsruhestrom sehr nachteilig aus,
wenn über größere Zeitspannen integriert wird. Ebenso wirkt sich eine Offset-Spannung
aus. Beide Effekte können durch eine geeignete Kompensationsschaltung eliminiert werden.
4KAPITEL 9. ANWENDUNGSSCHALTUNGEN MIT OPERATIONSVERSTÄRKERN
9.2
Konstantstrom- und Konstantspannungsquellen
Wird als Eingangsspannung des gegengekoppelten OP eine Gleichspannung gewählt, dann
wird auch die Ausgangsspannung zeitlich konstant sein. Selbstverständlich ist sowohl der
Umkehrverstärker als auch der Elektrometerverstärker gleichermaßen geeignet.
In der Praxis werden Konstantspannungsquellen in Netzgeräten eingesetzt. Die hierbei
gewünschte Laststromstärke kann dann in der Regel vom OP nicht mehr erbracht werden und es wird ein Leistungstransistor T in Emitterfolgerschaltung (Längstransistor)
eingesetzt (Bild 9.3 b).
Abbildung 9.3: a) Konstantspannungsquelle b) Stabilisiertes Netzgerät
Die Gewinnung der Referenzspannung wird am einfachsten mit einer Zenerdiode vorgenommen. Die durch den Spannungsteiler R1 , R2 geteilte Ausgangsspannung Ua muss
gleich der Referenzspannung sein. Daraus folgt sofort:
Ua = (1 + R2 /R1 )Ur
(9.6)
Die Stabilisierung eines Stromes erfolgt über den von ihm erzeugten Spannungsabfall
an einem Widerstand R1 . Bild 9.4 zeigt ein Beispiel für einen nach Masse geschalteten
Lastwiderstand.
Abbildung 9.4: Konstantstromquelle
9.3. SCHWELLENWERTDETEKTOREN
9.3
5
Schwellenwertdetektoren
Man versteht unter einem Schwellenwertdetektor eine Schaltung, die ihren Ausgangszustand beim Über- oder Unterschreiten eines gewissen Schwellenwertes abrupt ändert. Bei
OPs mit ±Ub symmetrischer Versorgungsspannung sind die beiden Ausgangszustände
±US wobei die Sättigungsspannung im Betrag etwas unter der Betriebsspannung liegt.
Beim Komparator werden zwei Spannungen miteinander verglichen (Bild 9.5 a). Der vertikal verlaufende Kurvenast der Übertragungscharakteristik in Bild 9.5 b) umfasst den
linearen Aussteuerbereich. Streng genommen hat er deshalb eine endliche Steigung. Bewegt sich nun ein Signal gerade innerhalb dieses Bereichs, sei es durch unerwünscht eingekoppelte Störspannungen oder Rauschen, dann tritt mehrfaches undefiniertes Umschalten
auf.
Abbildung 9.5: Komparator (a,b) und Schmitt-Triger (c,d)
Diesen Nachteil vermeidet der Schmitt-Trigger nach Bild 9.5 c durch Mitkopplung, wodurch die Übertragungscharakteristik hysteresebehaftet wird (siehe OPS 1). Er ist dadurch eine instabile Schaltung im Sinne von Gl. OPS 2. Die Schwellenspannung hängt
über
R1
|US |
(9.7)
R2
mit der Sättigungsspannung zusammen. Die Mitkopplung hat zudem eine beschleunigende
Wirkung auf den Umschaltvorgang.
|UT | =
6KAPITEL 9. ANWENDUNGSSCHALTUNGEN MIT OPERATIONSVERSTÄRKERN
9.4
Flipflop und Multivibrator
Durch Ergänzung des Schmitt-Triggers am invertierenden Eingang mit einem Hochpass
entsteht ein Flipflop (Bild 9.6 a). Wird die Flanke des Triggerimpulses größer als die
Schwellenspannung, dann geht der Schmitt-Trigger in den anderen Zustand.
Abbildung 9.6: Schaltung und Zeitverläufe der Spannungen bei Flipflop (a,b) und Multivibrator (c,d)
Wird der Schmitt-Trigger dagegen nun am invertierenden Ausgang mit einem RC-Tiefpass
ein zweites Mal zurückgekoppelt, dann entsteht ein Multivibrator (Bild 9.6 c). Zum
Verständnis der Schaltung ist es zweckmäßig, zuerst von einer Ausgangsspannung nach
Bild 9.6 d) oben auszugehen. Daraus leiten sich die Spannungen u+ und u− an den Eingangsklemmen ab, u+ als einfache Spannungsteilung von ua , u− als Sprungantwort des
RC-Tiefpasses. u+ hat in Bild 9.6 d) unten den gestrichelten, u− den durchgezogenen
Verlauf. Sobald u− den Wert UT unterschreitet, springt ua in den anderen Zustand. Dadurch wird die eingangs gemachte Annahme über ua bestätigt.
Die Betrachtung der beiden letzten Schaltungen setzt nun nicht einmal mehr eingangsseitig einen analogen Signalverlauf voraus. Sie geht nur noch aus von zwei vorhandenen
Schaltzuständen. Wir haben mit ihnen den Bereich der analogen Schaltungstechnik verlassen in Richtung der digitalen Schaltungstechnik.
9.5. DER OP ALS REGLERBAUSTEIN
9.5
7
Der OP als Reglerbaustein
Innerhalb von geregelten Systemen meist in der industriellen Produktion werden OPs als
Reglerbausteine eingesetzt. Die symbolische Darstellung solcher Systeme für Planung und
Analyse wird mit Hilfe von Signalflußdiagrammen wie in Bid OPR 3 vorgenommen, die
allerdings viel mehr Blöcke enthalten. Signale können dann auch Druck, Temperatur oder
Durchflussmenge sein. Anstelle des Verstärkers V tritt dann der Reglerbaustein.
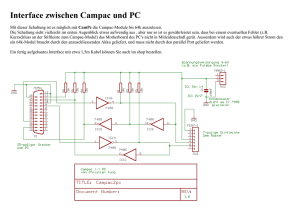
Abbildung 9.7: Schaltung und Frequenzgang von P-und I-Regler
Bild 9.7 a) und c) stellen einen solchen Regler dar. Sie sehen aus wie ein invertierender
Verstärker bzw. ein Integrator. Entsprechend spricht man von eine P-(Proprtional) bzw.
einem I-(Integral) Regler mit den Frequenzgängen nach Bild 9.7 b) oder d).
Abbildung 9.8: Schaltung und Frequenzgang von PI- und PID-Regler
8KAPITEL 9. ANWENDUNGSSCHALTUNGEN MIT OPERATIONSVERSTÄRKERN
Fügt man nach Bild 9.8 a) zusätzlich einen Kondensator C2 in den Rückkopplungszweig
ein, dann ergibt die Knotengleichung am invertierenden Eingang:
Ue
Ua
U
R2
1
= −I 2 = −
−→ a = −
+
R1
R2 + 1/jωC2
Ue
R1 jωC2 R1
I1 =
|{z}
P
|
{z
I
(9.8)
}
Hier erkennt man durch die Unterklammerungen den proportionalen und den integralen
Anteil und spricht dann von einem PI-Regler mit dem Frequenzgang nach Bild 9.8 b).
Ein zweiter Kondensator C1 am Eingang nach Bild c) ändert den Strom I 1 und damit
die Verstärkung:
I 1 = U e (1/R1 + jωC1 ) −→
Ua
= (1/R1 + jωC1 ) · (R2 + 1/jωC2 )
Ue
Ausmultiplizieren führt zum Hinzukommen eines Terms jωC1 R2 , der auf eine Differentiation hinweist. Die führt zum Frequenzgang des Bildes d) und der Bezeichnung PID-Regler.
1
Ua
R2 C1
+
+ jωC1 R2
=−
+
| {z }
Ue
R
C
jωC R
| 1 {z 2} | {z2 1}
D
P
I
(9.9)